
Design and Experimental Study of the Key Components of a Rape (Brassica campestris) Shoots (Changxiangtai 603) Flexible Clamping Harvester
Abstract
:1. Introduction
1.1. Research Purpose and Current Situation
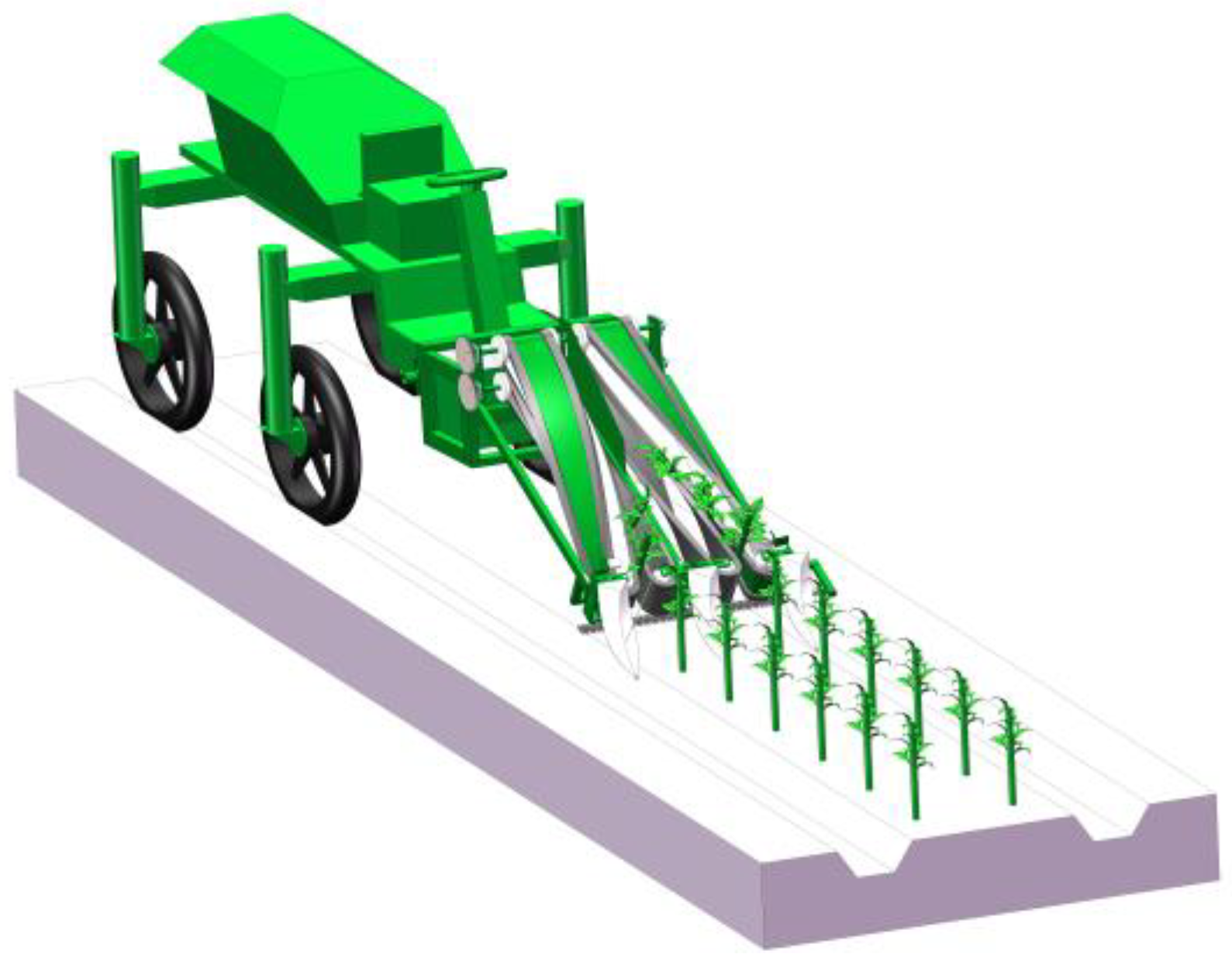
1.2. General Structure of Rape Shoots Harvester
1.3. Working Principle and Technical Parameters
2. Materials and Methods
2.1. Planting Parameters of Rape Shoots
2.2. Material Characteristics of Rape Shoots
2.2.1. Basic Physical Parameters of Rape Shoots
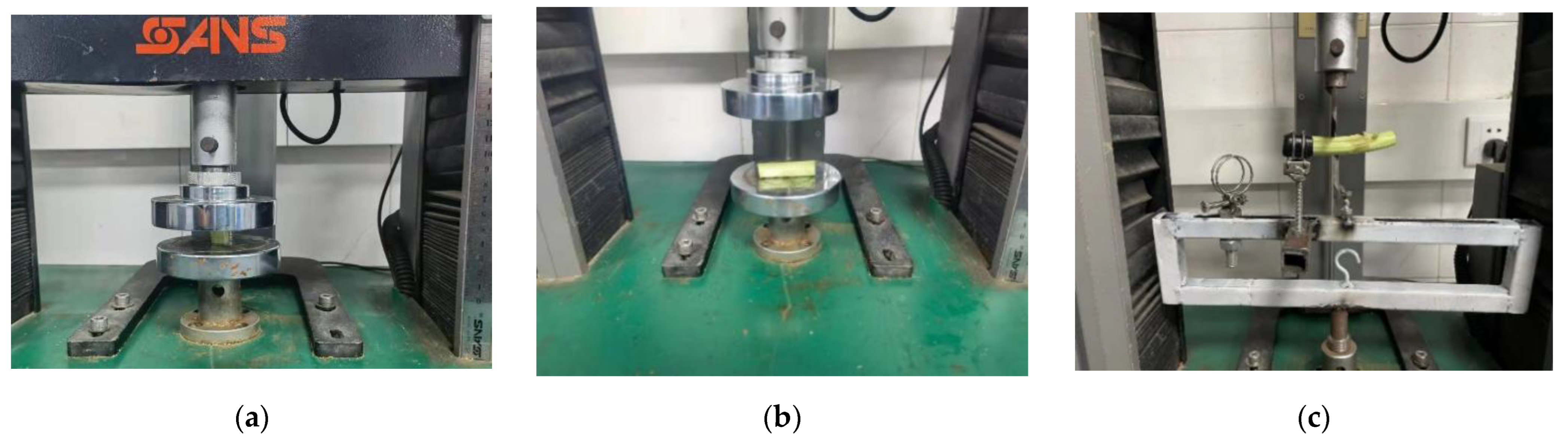
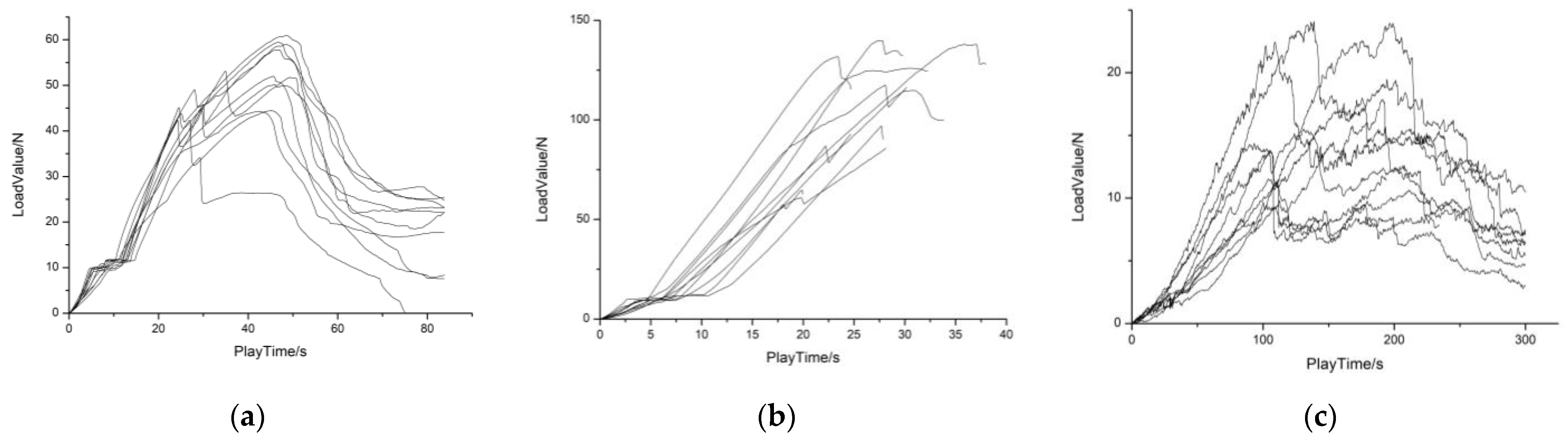
2.2.2. Mechanical Properties of Rape Shoot Stalks
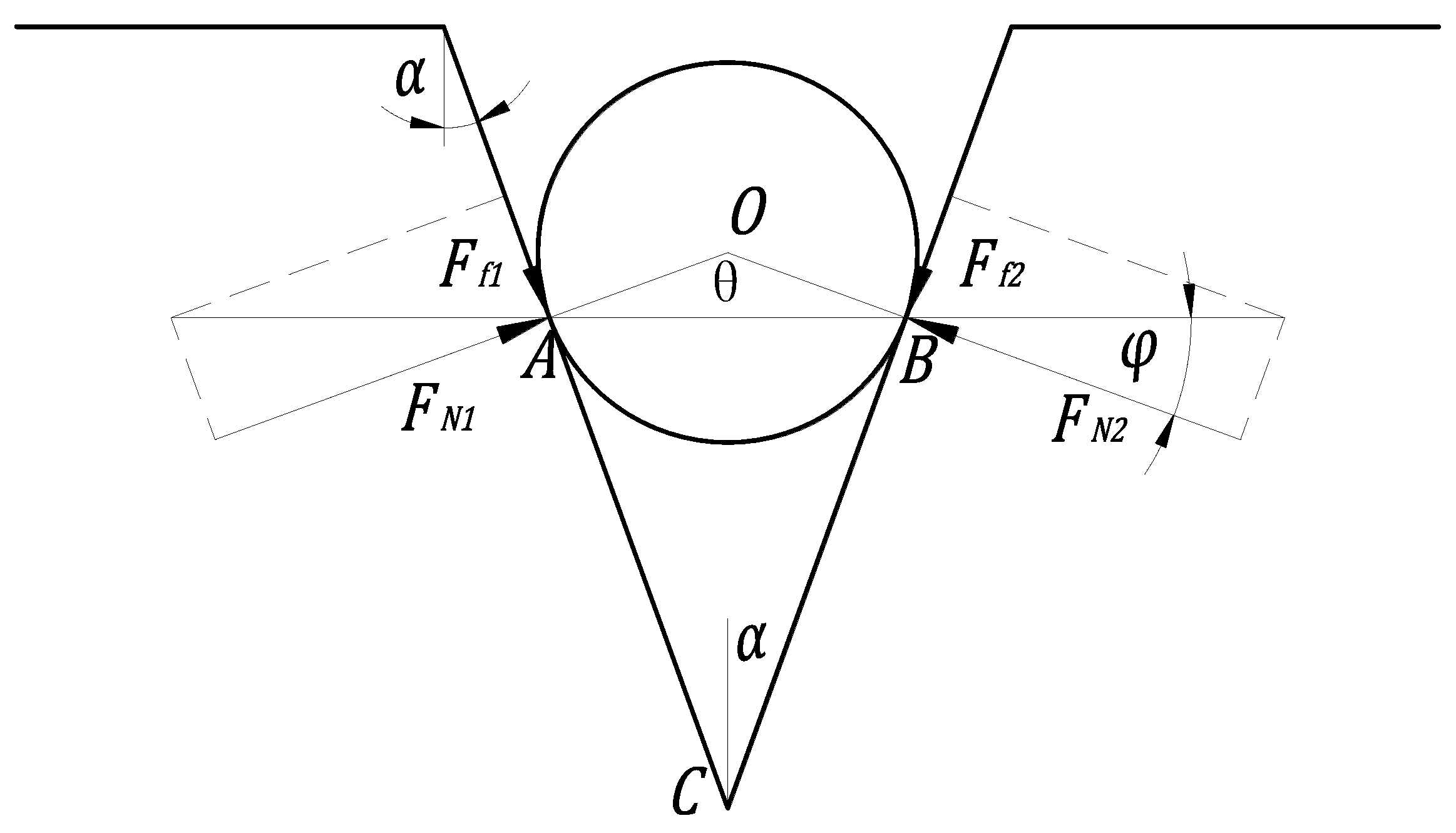
2.3. Cutting Mechanism of Cutting Device
2.3.1. Cutting Device Clamped Stalk Conditions
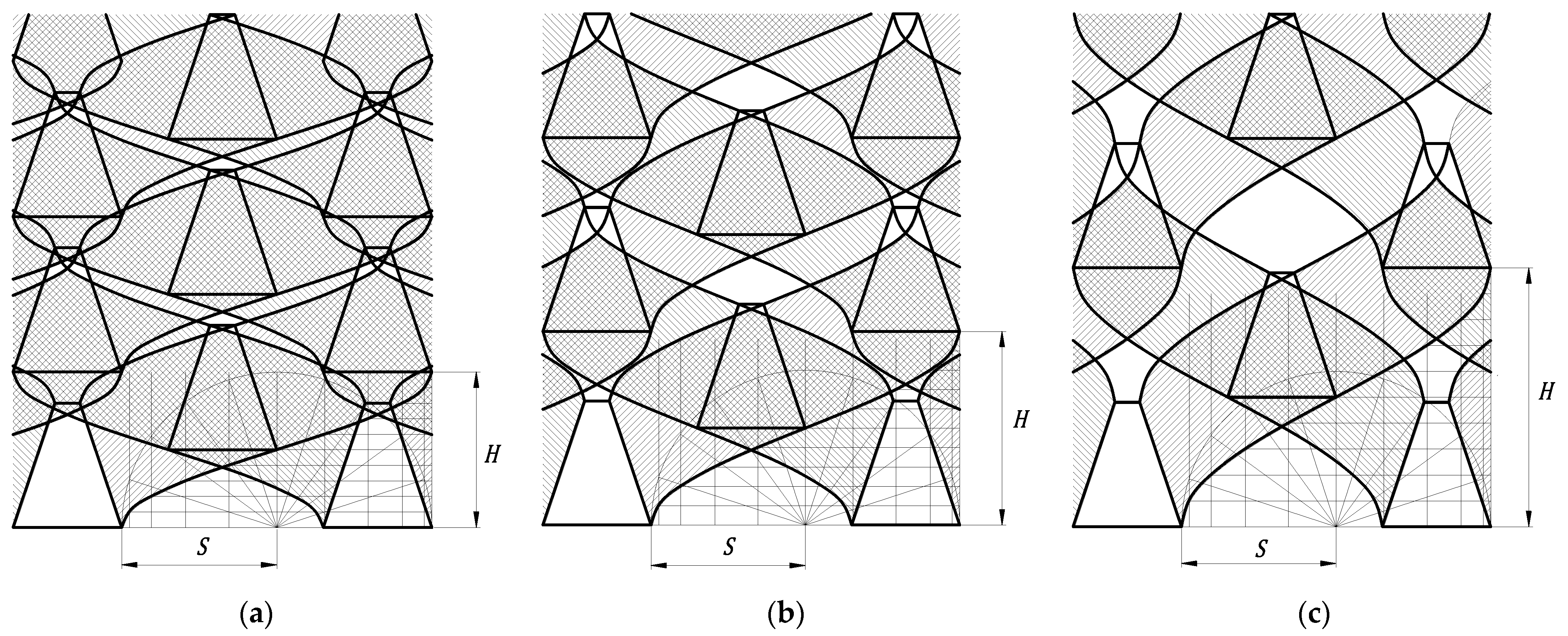
2.3.2. Cutting Speed Ratio
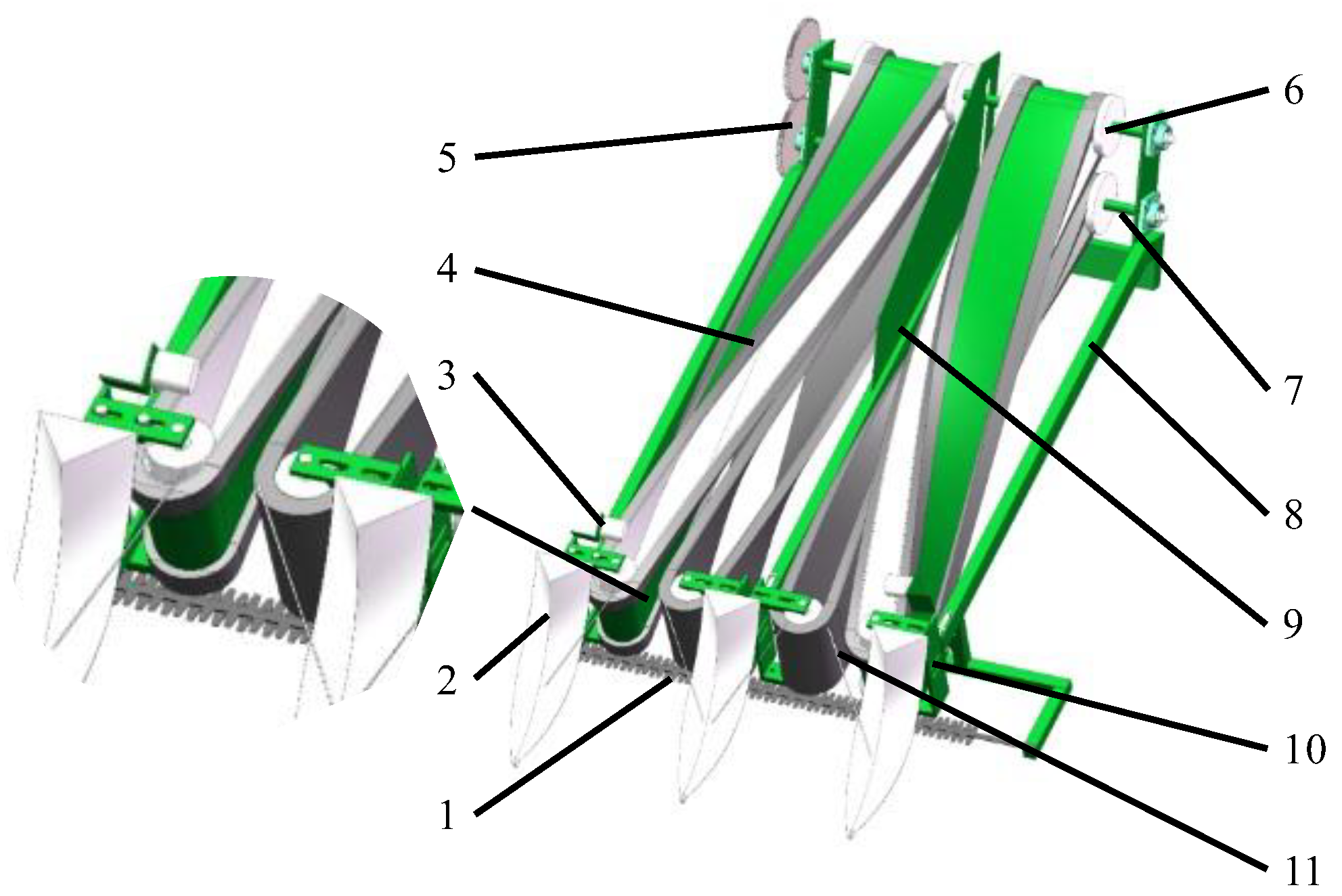
2.4. Design and Analysis of Clamping and Conveying Device
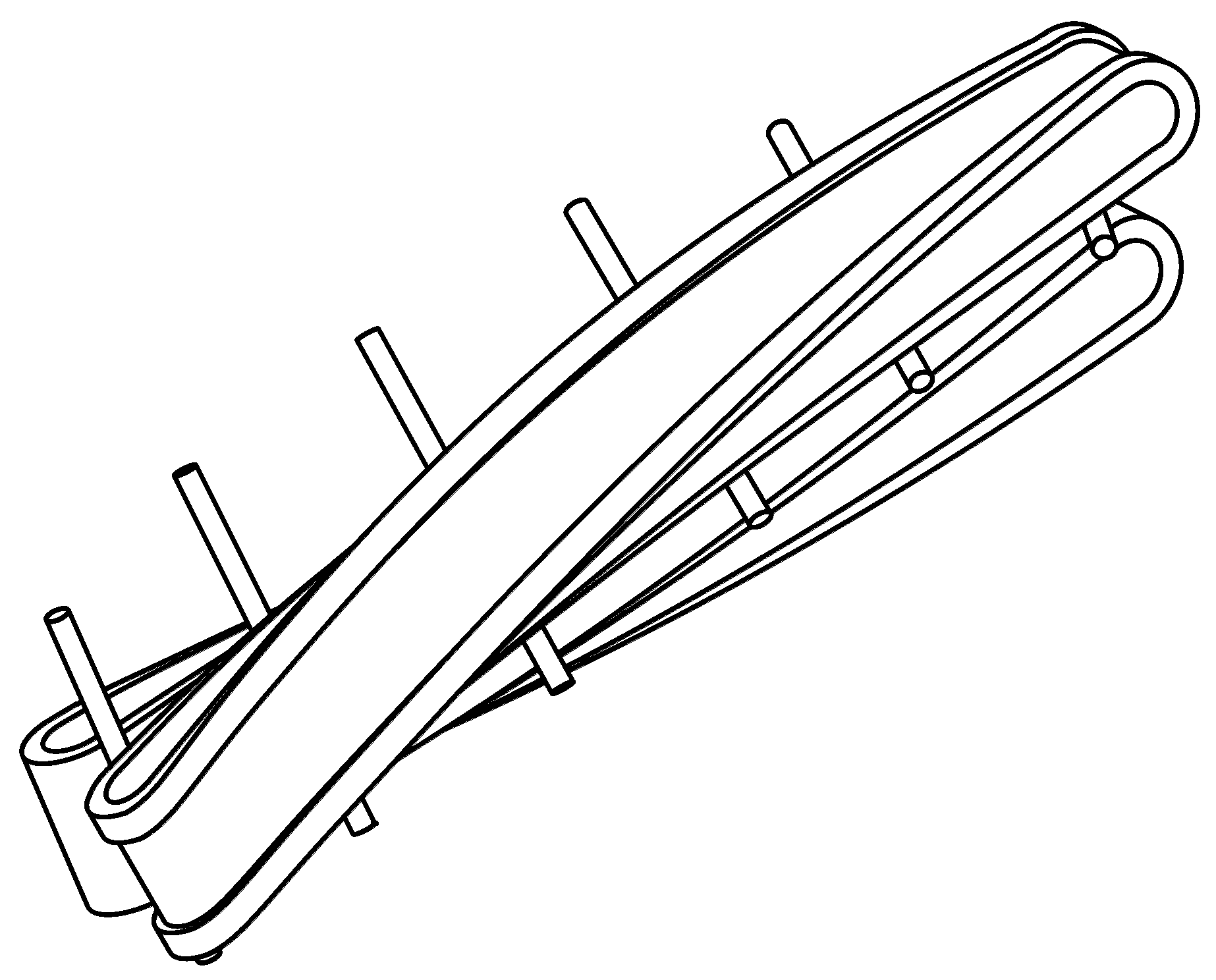
2.4.1. Design of Flexible Clamping and Conveying Device
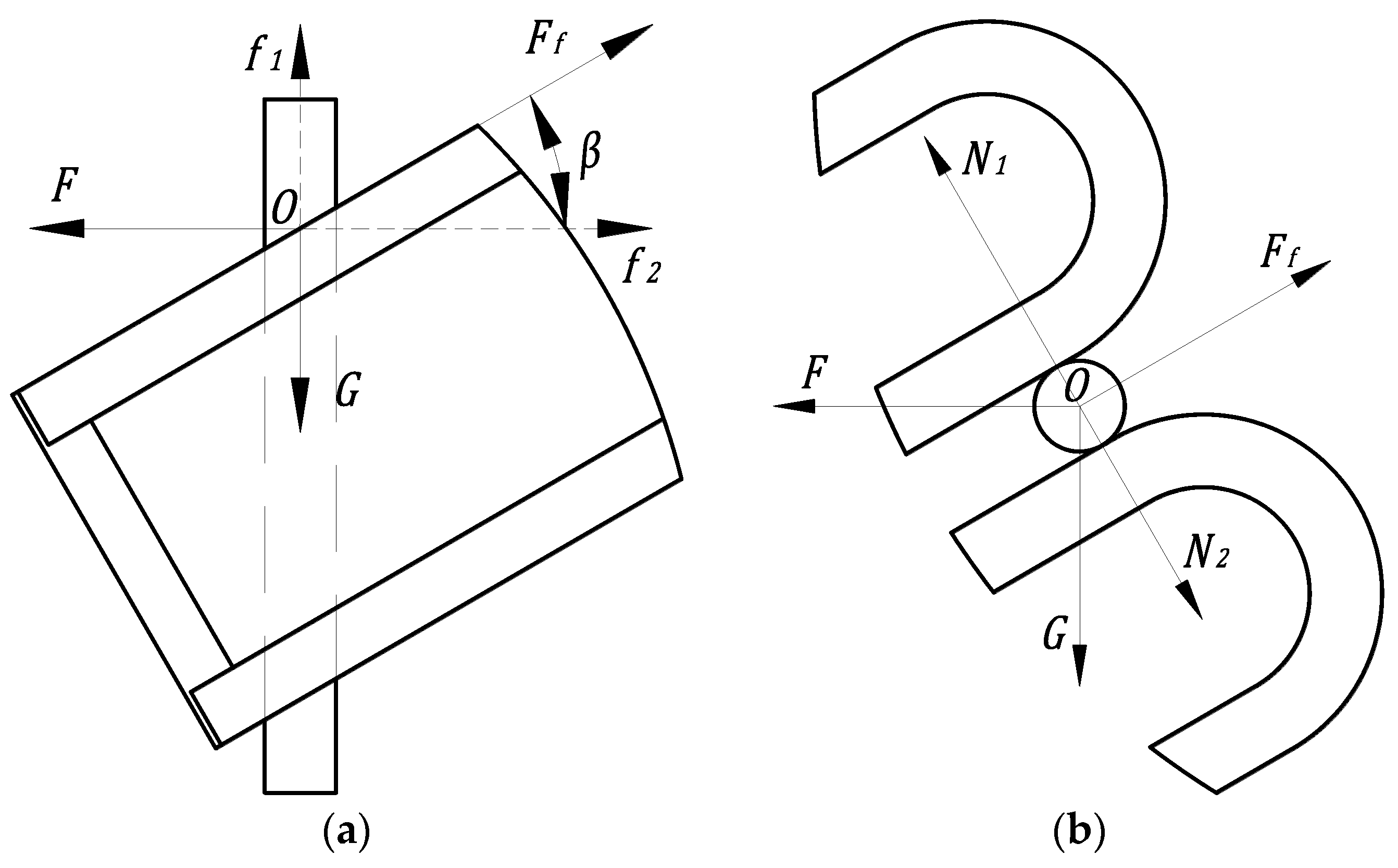
2.4.2. Mechanical Analysis of Stalk Clamping and Conveying
3. Tests and Results
3.1. Test Materials and Equipment of Indoor Bench Test
3.2. Test Method and Evaluation Index
3.3. Single-Factor Tests Affecting the Harvesting Quality of Rape Shoots
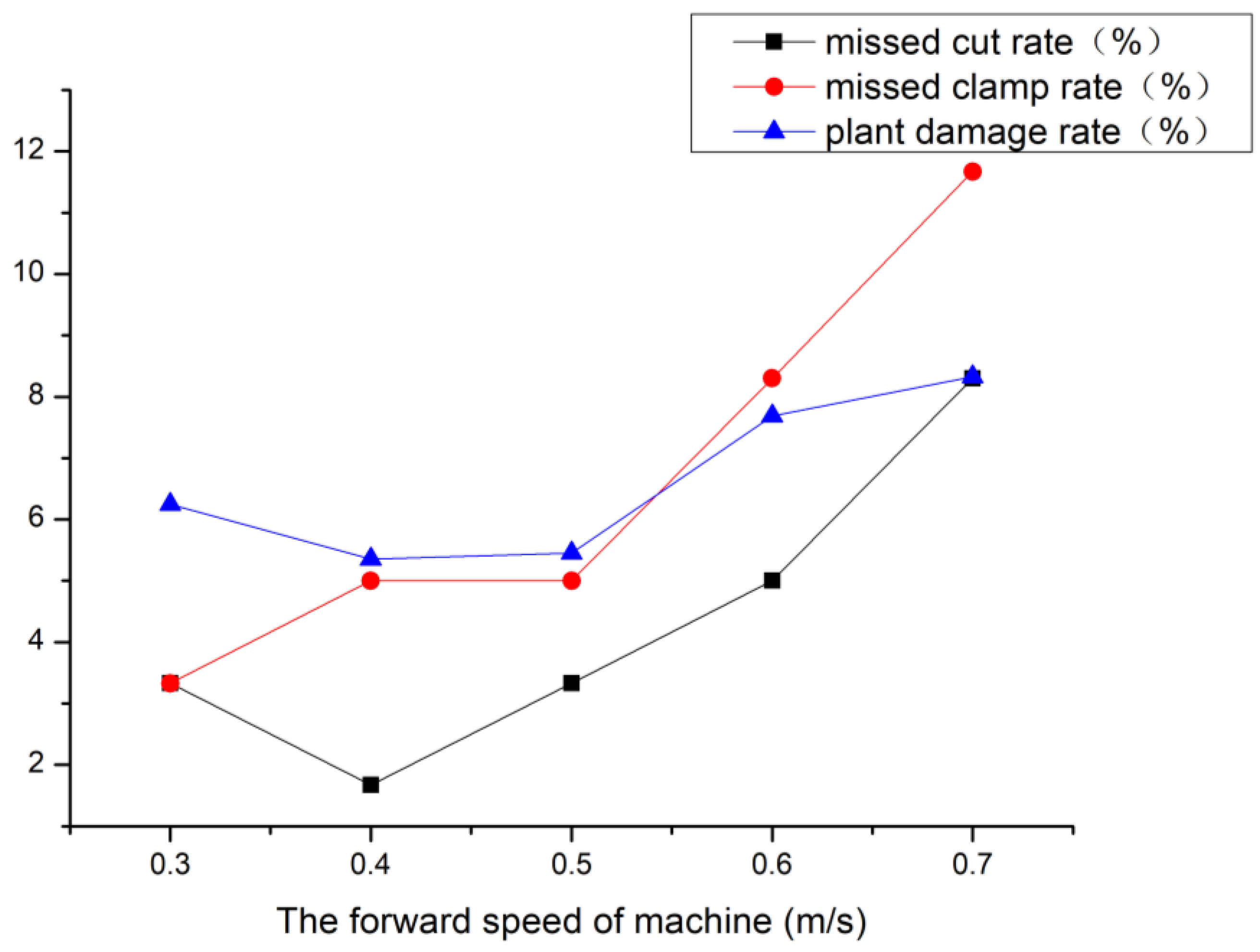
3.3.1. Influence of Forward Speed of Machine on Harvesting Quality
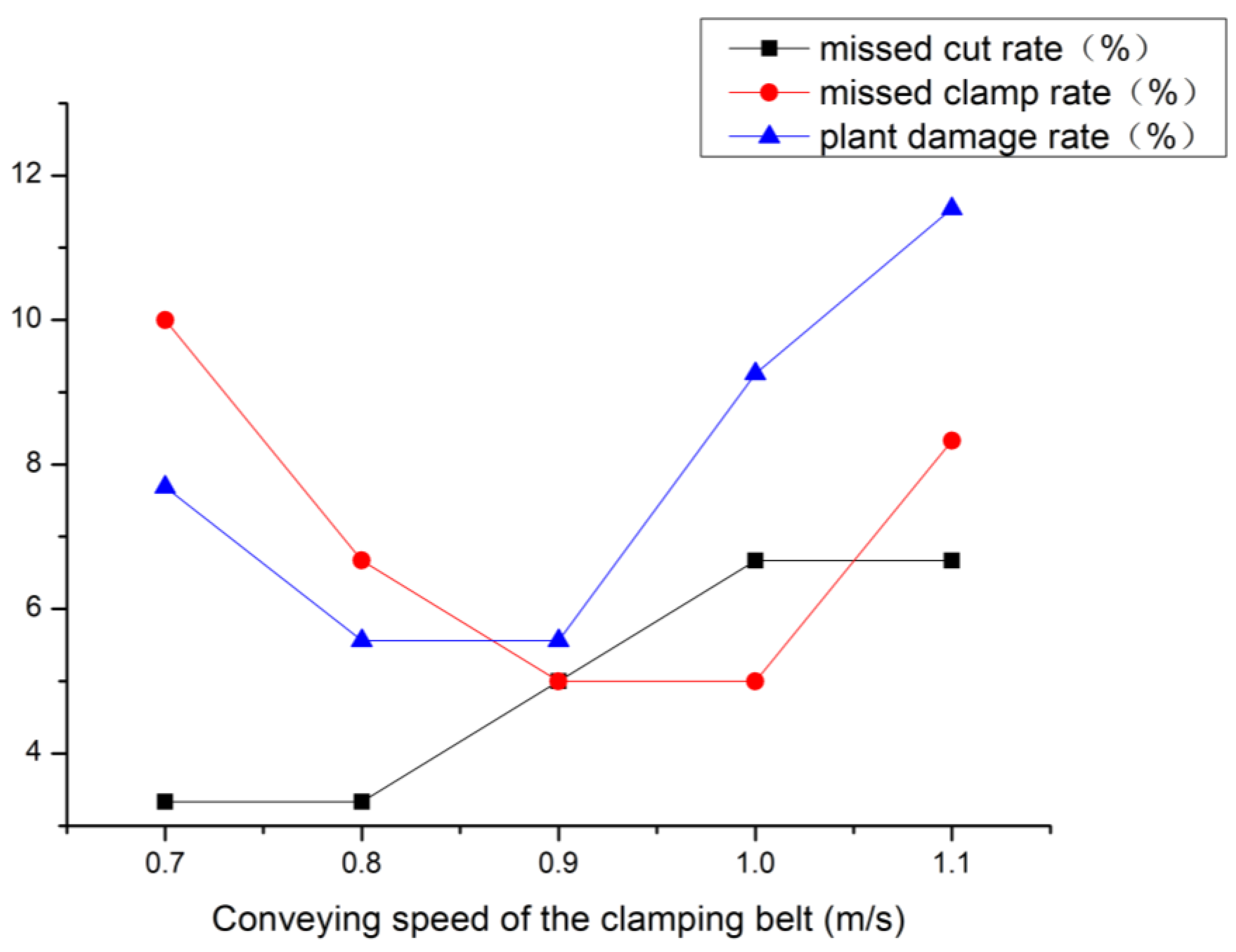
3.3.2. Influence of Clamping Belt Conveying Speed on Harvesting Quality
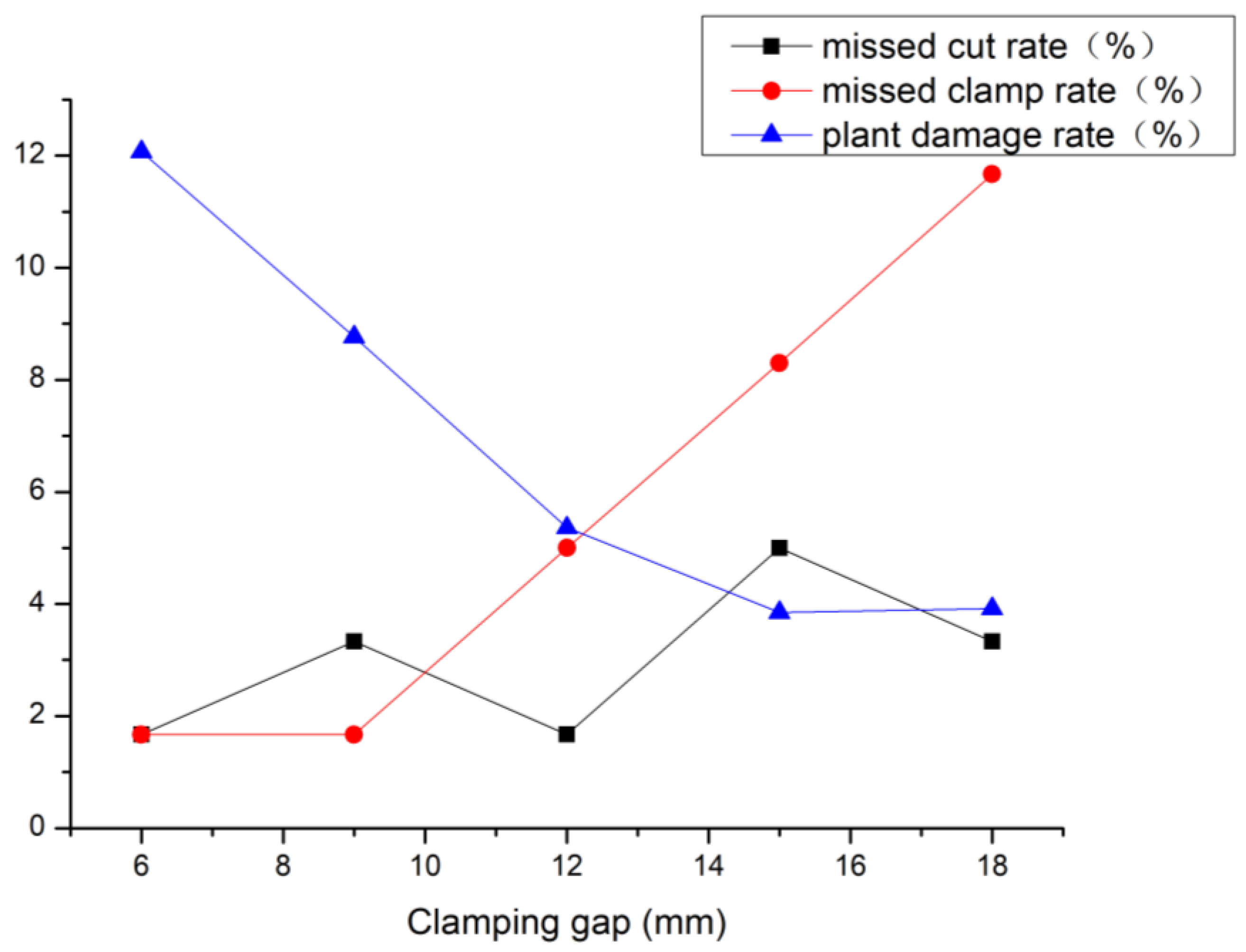
3.3.3. Effect of Clamping Gap on Harvesting Quality
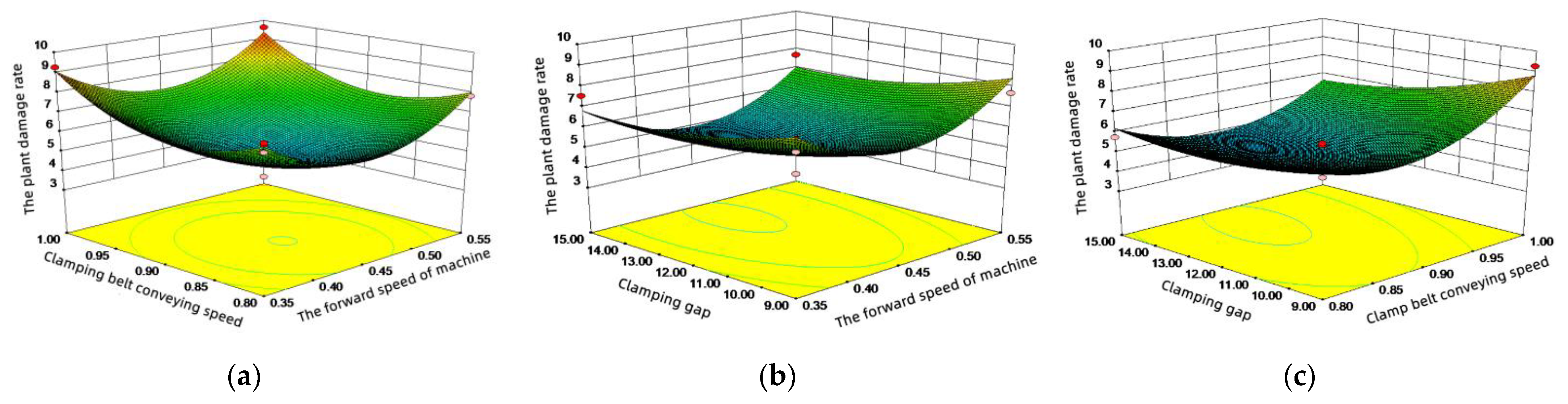
3.4. Response Surface Synthesis Analysis of Rape Shoot Harvesting Quality
3.4.1. Experimental Design and Results
3.4.2. Parameter Optimization
3.5. The Field Trial
4. Discussion
5. Conclusions
- (1)
- The forward speed of the machine, the speed of the clamping belt and the clamping gap were selected as the test factors, and the missed cut rate, missed clamp rate and plant damage rate were used as the evaluation indexes in the single-factor tests of the rape shoots harvester. The results show that the harvester has a good working effect when the forward speed of the machine is in the range of 0.35~0.55 m/s, the conveying speed of the clamping belt is in the range of 0.8~1.0 m/s and the clamping gap is in the range of 9~15 mm.
- (2)
- Design-expert 8.0.6 software was used for response surface synthesis analysis design and data optimization, and the optimal working parameters of the rape shoots were a machine forward speed of 0.42 m/s, clamping belt speed of 0.89 m/s and 11.43 mm clamping gap, which resulted in a 2.63% missed cut rate, 4.84% missed clamp rate and 5.22% plant damage rate. The field validation tests showed that the rape shoots were cut effectively and transported stably.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, Q.; Ren, T.; Zhang, Y.; Li, X.; Cong, R.; Liu, S.; Fan, X.; Lu, J. Evaluating the application of controlled release urea for oilseed rape on Brassica napus in a regional scale: The optimal usage, yield and nitrogen use efficiency responses. Ind. Crops Prod. 2019, 140, 111560. [Google Scholar] [CrossRef]
- Songchao, Z.; Chen, C.; Jiqiang, L.; Tao, S.; Xiaoming, L.; Yong, T.; Xinyu, X. The Airflow Field Characteristics of the Unmanned Agricultural Aerial System on Oilseed Rape (Brassica napus) Canopy for Supplementary Pollination. Agronomy 2021, 11, 2035. [Google Scholar]
- Wan, X.; Liao, Q.; Liao, Y.; Ding, Y.; Zhang, Q.; Huang, H.; Chen, H.; Zhu, L. Situation and Prospect of Key Technology and Equipment in Mechanization and Intelligentization of Rapeseed Whole Industry Chain. J. Huazhong Agric. Univ. 2021, 40, 24–44. [Google Scholar]
- Zhang, Z.; Yin, Y.; Liu, F.; Wang, J.; Fu, Y. Current Situation and Development Countermeasures of Chinese Rapeseed Multifunctional Development and Utilization. Chin. J. Oil Crop Sci. 2018, 40, 618–623. [Google Scholar]
- Liao, Y.; Liao, Q.; Zhou, Y.; Wang, Z.; Jiang, Y.; Liang, F. Parameters Calibration of Discrete Element Model of Fodder Rape Crop Harvest in Bolting Stage. Trans. Chin. Soc. Agric. Mach. 2020, 51, 73–82. [Google Scholar]
- Liao, Y.; Li, Y.; Wan, X.; Liao, Q.; Shan, Y.; Meng, Z. Design and Experiment of Gantry Type Electric Drive Rapeseed Stalks Harvester. Trans. Chin. Soc. Agric. Mach. 2022, 53, 147–159. [Google Scholar]
- Wenqi, W.; Yidong, M.; Longsheng, F.; Yongjie, C.; Yaqoob, M. Physical and Mechanical Properties of Hydroponic Lettuce for Automatic Harvesting. Inf. Process. Agric. 2020, 8, 550–559. [Google Scholar]
- Hachiya, M.; Amano, T.; Yamagata, M.; Kojima, M. Development and Utilization of a New Mechanized Cabbage Harvesting System for Large Fields. Jpn. Agric. Res. Q. JARQ 2004, 38, 97–103. [Google Scholar] [CrossRef] [Green Version]
- Available online: https://www.hortech.it/en/prd/slide-crab/ (accessed on 8 July 2022).
- Ibrahim, E.D.M.; Mohamed, E.S.A. Fabrication and Evaluation of a Cabbage Harvester Prototype. Agriculture 2020, 10, 631. [Google Scholar]
- Liu, D.; Xiao, H.; Jin, Y.; Yang, G.; Liu, M. Design and Experiment of the Orderly Harvester of Chinese Little Greens. Int. Agric. Eng. J. 2018, 27, 295–306. [Google Scholar]
- Shi, Y.; Zhang, Y.; Wang, X.; Morice, O.; Sun, G. Design of Orderly Harvester in Stems-leafy Vegetables Based on Pro/E. J. Agric. Mech. Res. 2017, 39, 139–143. [Google Scholar]
- Zhang, J.; Wang, J.; Du, D.; Long, S.; Wang, Y.; You, X. Design and Experiment of Crawler Self-propelled Single-row Harvester for Chinese Cabbage. Trans. Chin. Soc. Agric. Mach. 2022, 53, 134–146. [Google Scholar]
- Sarkar, P.; Raheman, H. A Comprehensive Review of Mechanized Cabbage Harvesting Systems and Its Present Status in India. J. Inst. Eng. India Ser. A 2021, 102, 861–869. [Google Scholar] [CrossRef]
- Guan, Z.; Wu, C.; Wang, G.; Li, H.; Mu, S. Design of Bidirectional Electric Driven Side Vertical Cutter for Rape Combine Harvester. Trans. Chin. Soc. Agric. Eng. 2019, 35, 1–8. [Google Scholar]
- Mitsuhashi, T.; Chida, Y.; Tanemura, M. Autonomous Travel of Lettuce Harvester using Model Predictive Control. IFAC PapersOnLine 2019, 52, 155–160. [Google Scholar] [CrossRef]
- Liu, D.; Xiao, H.; Jin, Y. Research Status and Development Countermeasures of Orderly Harvesting Machine of Leaf Vegetables. Jiangsu Agric. Sci. 2019, 47, 27–31. [Google Scholar]
- Wang, W.; Lv, X.; Wang, S.; Lu, D.; Yi, Z. Current Status and Development of Stem and Leaf Vegetable Mechanized Harvesting Technology. J. China Agric. Univ. 2021, 26, 117–127. [Google Scholar]
- GB/T 5262-2008; Measuring Methods for Agricultural Machinery Testing Conditions. General Rules. Standardization Administration of the P.R.C.: Beijing, China, 2008; Volume 3.
- Liao, Y.; Wang, Z.; Liao, Q.; Wan, X.; Zhou, Y.; Liang, F. Calibration of Discrete Element Model Parameters of Forage Rape Stalk at Early Pod Stage. Trans. Chin. Soc. Agric. Mach. 2020, 51, 236–243. [Google Scholar]
- Wang, W. Design and Tests Study of Celery Harvester. Master’s Thesis, Zhejiang Sci-Tech University, Hangzhou, China, 2021. [Google Scholar]
- Liu, D. Optimization Design and Experimental Study on Key Components of Orderly Harvester of Chinese Little Greens. Master’s Thesis, Chinese Academy of Agricultural Sciences, Beijing, China, 2019. [Google Scholar]
- Bin, Z.; Haolu, L.; Jicheng, H.; Kunpeng, T.; Cheng, S.; Xianwang, L.; Xingsong, W. Ramie Field Distribution Model and Miss Cutting Rate Prediction Based on the Statistical Analysis. Agriculture 2022, 12, 651. [Google Scholar]
- Hu, M. Design and Experimental Study of Test Bench of Spinach Mechanical Harvesting. Master’s Thesis, Shandong Agricultural University, Taian, China, 2016. [Google Scholar]
- Yao, S. Optimal Design and Experimental Research on Key Components of Cabbage Harvester. Master’s Thesis, Chinese Academy of Agricultural Sciences, Beijing, China, 2020. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Dimension/m × m × m | 1.2 × 5.5 × 2.2 |
| Drive mode | Hydraulic (System pressure 14 MPa) |
| Working width/mm | 1000 |
| Operating speed/km·h−1 | 0~3 |
| Cutter type | Reciprocating double-action knife |
| Operating efficiency/ha·h−1 | 0.36 |
| Number of flexible clamping conveyors | 2 |
| Parameter | Value |
|---|---|
| Ridge width/mm | 600 |
| Furrow depth/mm | ≤300 |
| Number of plant rows per ridge | 2 |
| Sowing method | Drilling |
| Plant row spacing/mm | 350 |
| Statistical Indicators | Crop Natural Height mm | Plant Weight g | Plant Height after Cutting mm | Diameter at Cut mm | Stem Static Friction Factor | Stalk Density g·cm−3 |
|---|---|---|---|---|---|---|
| Mean value | 793 | 116.15 | 488 | 13.4 | 0.75 | 1.04 |
| Maximum value | 876 | 171.18 | 532 | 15.5 | 0.84 | 1.15 |
| Minimum value | 675 | 64.99 | 458 | 11.2 | 0.68 | 1.01 |
| Standard deviation | 69.2 | 30.94 | 20.43 | 1.29 | 0.04 | 0.04 |
| Coefficient of variation | 0.09 | 0.26 | 0.04 | 0.10 | 0.05 | 0.04 |
| Levels | Factor | ||
|---|---|---|---|
| The Forward Speed of Machine X1/m/s | Clamping Belt Conveying Speed X2/m/s | Clamping Gap X3/mm | |
| −1 | 0.35 | 0.8 | 9 |
| 0 | 0.45 | 0.9 | 12 |
| 1 | 0.55 | 1.0 | 15 |
| Experimental Number | Experimental Factor | Experimental Index | ||||
|---|---|---|---|---|---|---|
| The Forward Speed of Machine X1/m/s | Clamping Belt Conveying Speed X2/m/s | Clamping Gap X3/mm | Missed Cut Rate Y1/% | Missed Clamp Rate Y2/% | Plant Damage Rate Y3/% | |
| 1 | 0.45 | 0.90 | 12.00 | 3.33 | 5 | 5.45 |
| 2 | 0.55 | 0.90 | 9.00 | 6.67 | 6.67 | 7.69 |
| 3 | 0.45 | 0.90 | 12.00 | 1.67 | 5 | 5.36 |
| 4 | 0.45 | 0.80 | 15.00 | 3.33 | 10 | 5.77 |
| 5 | 0.45 | 1.00 | 9.00 | 5 | 5 | 9.26 |
| 6 | 0.45 | 0.90 | 12.00 | 5 | 3.33 | 5.45 |
| 7 | 0.45 | 0.80 | 9.00 | 3.33 | 6.67 | 7.41 |
| 8 | 0.35 | 1.00 | 12.00 | 5 | 5 | 9.26 |
| 9 | 0.35 | 0.80 | 12.00 | 3.33 | 6.67 | 7.41 |
| 10 | 0.45 | 1.00 | 15.00 | 5 | 8.33 | 5.77 |
| 11 | 0.55 | 0.80 | 12.00 | 6.67 | 8.33 | 7.84 |
| 12 | 0.35 | 0.90 | 9.00 | 3.33 | 5 | 7.27 |
| 13 | 0.55 | 1.00 | 12.00 | 8.33 | 5 | 9.62 |
| 14 | 0.55 | 0.90 | 15.00 | 6.67 | 6.67 | 7.69 |
| 15 | 0.35 | 0.90 | 15.00 | 3.33 | 8.33 | 7.55 |
| 16 | 0.45 | 0.90 | 12.00 | 1.67 | 5 | 5.36 |
| 17 | 0.45 | 0.90 | 12.00 | 3.33 | 6.67 | 3.7 |
| Variance Source | Qualified Index A/% | Replay Index D/% | Missing Index M/% | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Sum of Square | Degree of Freedom | Mean Square | F Value | p Value | Sum of Square | Degree of Freedom | Mean Square | F Value | p Value | Sum of Square | Degree of Freedom | Mean Square | F Value | p Value | |
| Model | 47.51 | 9 | 5.28 | 4.76 | 0.0258 | 39.73 | 9 | 4.41 | 4.04 | 0.0396 | 37.08 | 9 | 4.12 | 4.51 | 0.0298 |
| X1 | 22.28 | 1 | 22.28 | 20.11 | 0.0029 | 0.35 | 1 | 0.35 | 0.32 | 0.5898 | 0.23 | 1 | 0.23 | 0.25 | 0.6328 |
| X2 | 5.56 | 1 | 5.56 | 5.02 | 0.0600 | 8.69 | 1 | 8.69 | 7.96 | 0.0257 | 3.75 | 1 | 3.75 | 4.11 | 0.0823 |
| X3 | 0.000 | 1 | 0.000 | 0.000 | 1.0000 | 12.48 | 1 | 12.48 | 11.42 | 0.0118 | 2.94 | 1 | 2.94 | 3.22 | 0.1159 |
| X1X2 | 2.5 × 10−5 | 1 | 2.5 × 10−5 | 2.256 × 10−5 | 0.9963 | 0.69 | 1 | 0.69 | 0.63 | 0.4533 | 1.2 × 10−3 | 1 | 1.2 × 10−3 | 1.3 × 10−3 | 0.9718 |
| X1X3 | 0.000 | 1 | 0.000 | 0.000 | 1.0000 | 2.77 | 1 | 2.77 | 2.54 | 0.1552 | 0.020 | 1 | 0.020 | 0.021 | 0.8877 |
| X2X3 | 0.000 | 1 | 0.000 | 0.000 | 1.0000 | 0.000 | 1 | 0.000 | 0.000 | 1.0000 | 0.86 | 1 | 0.86 | 0.94 | 0.3654 |
| X12 | 14.16 | 1 | 14.16 | 12.78 | 0.0090 | 0.18 | 1 | 0.18 | 0.17 | 0.6942 | 16.56 | 1 | 16.56 | 18.12 | 0.0038 |
| X22 | 4.20 | 1 | 4.20 | 3.79 | 0.0926 | 4.57 | 1 | 4.57 | 4.18 | 0.0802 | 9.29 | 1 | 9.29 | 10.17 | 0.0153 |
| X32 | 0.12 | 1 | 0.12 | 0.11 | 0.7553 | 8.96 | 1 | 8.96 | 8.20 | 0.0242 | 1.07 | 1 | 1.07 | 1.17 | 0.3160 |
| Residual | 7.76 | 7 | 1.11 | 7.65 | 7 | 1.09 | 6.39 | 7 | 0.91 | ||||||
| Lack of Fit | 2.5 × 10−5 | 3 | 8.33 × 10−6 | 4.3 × 10−6 | 1.0000 | 2.07 | 3 | 0.69 | 0.50 | 0.7050 | 4.06 | 3 | 1.35 | 2.32 | 0.2169 |
| Pure Error | 7.76 | 4 | 1.94 | 5.58 | 4 | 1.39 | 2.33 | 4 | 0.58 | ||||||
| Cor Total | 55.26 | 16 | 47.38 | 16 | 43.47 | 16 | |||||||||
| Levels | Missed Cut Rate Y1/% | Missed Clamp Rate Y2/% | Plant Damage Rate Y3/% |
|---|---|---|---|
| 1 | 3.33 | 3.33 | 5.36 |
| 2 | 5 | 6.67 | 3.77 |
| 3 | 1.67 | 3.33 | 7.02 |
| 4 | 3.33 | 8.33 | 5.66 |
| 5 | 0 | 5 | 5.26 |
| Average | 2.67 | 5.33 | 5.41 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiong, D.; Wu, M.; Xie, W.; Luo, H. Design and Experimental Study of the Key Components of a Rape (Brassica campestris) Shoots (Changxiangtai 603) Flexible Clamping Harvester. Agriculture 2023, 13, 792. https://doi.org/10.3390/agriculture13040792
Xiong D, Wu M, Xie W, Luo H. Design and Experimental Study of the Key Components of a Rape (Brassica campestris) Shoots (Changxiangtai 603) Flexible Clamping Harvester. Agriculture. 2023; 13(4):792. https://doi.org/10.3390/agriculture13040792
Chicago/Turabian StyleXiong, Dengyu, Mingliang Wu, Wei Xie, and Haifeng Luo. 2023. "Design and Experimental Study of the Key Components of a Rape (Brassica campestris) Shoots (Changxiangtai 603) Flexible Clamping Harvester" Agriculture 13, no. 4: 792. https://doi.org/10.3390/agriculture13040792