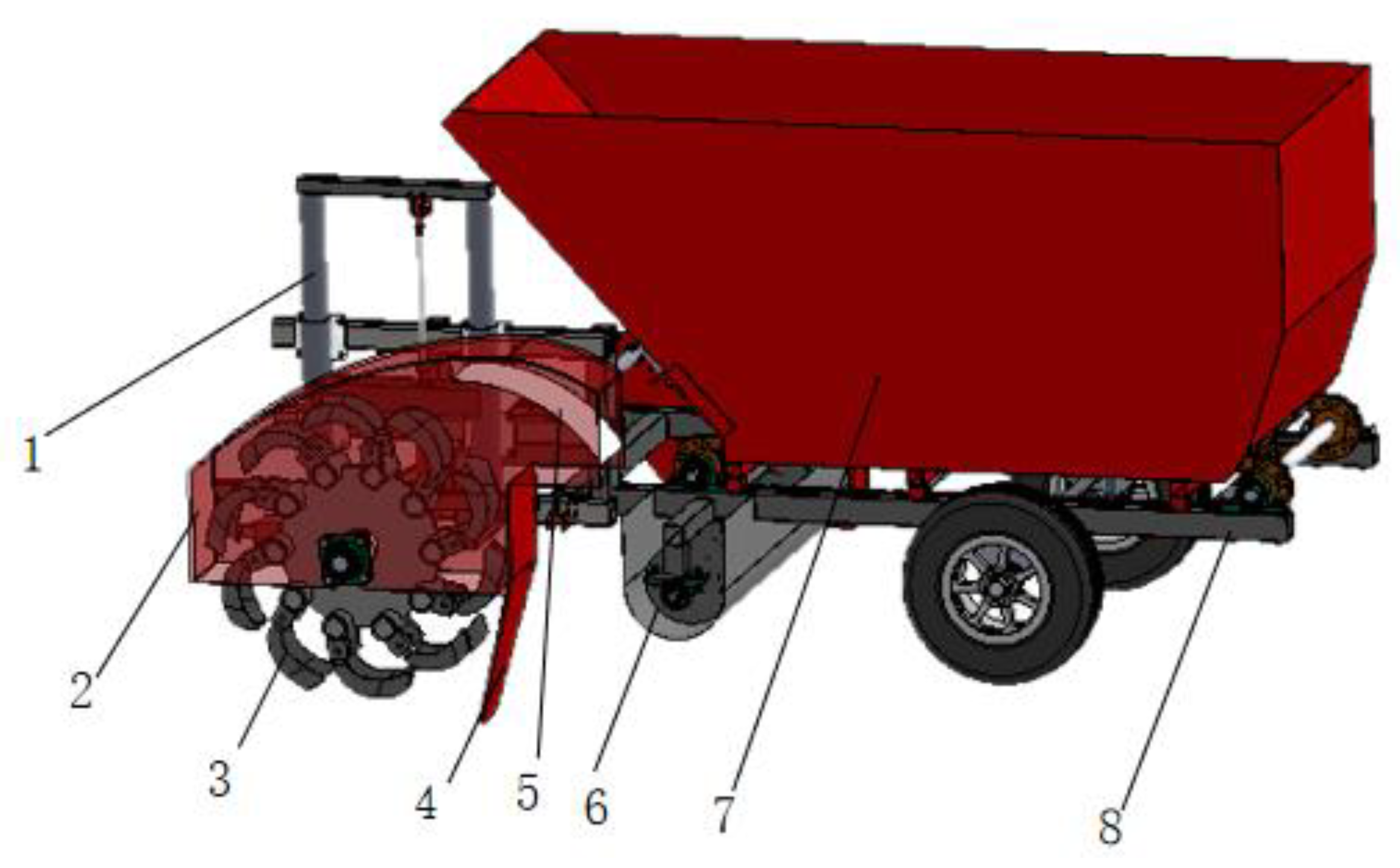
Figure 1.
General structure of soil and fertilizer collision mixing and mulching device. 1. lifting frame, 2. guide cover, 3. ditching mechanism, 4. trench cleaning plate, 5. Soil dividing plate, 6. Auger, 7. fertilizer box, 8. frame.
Figure 1.
General structure of soil and fertilizer collision mixing and mulching device. 1. lifting frame, 2. guide cover, 3. ditching mechanism, 4. trench cleaning plate, 5. Soil dividing plate, 6. Auger, 7. fertilizer box, 8. frame.
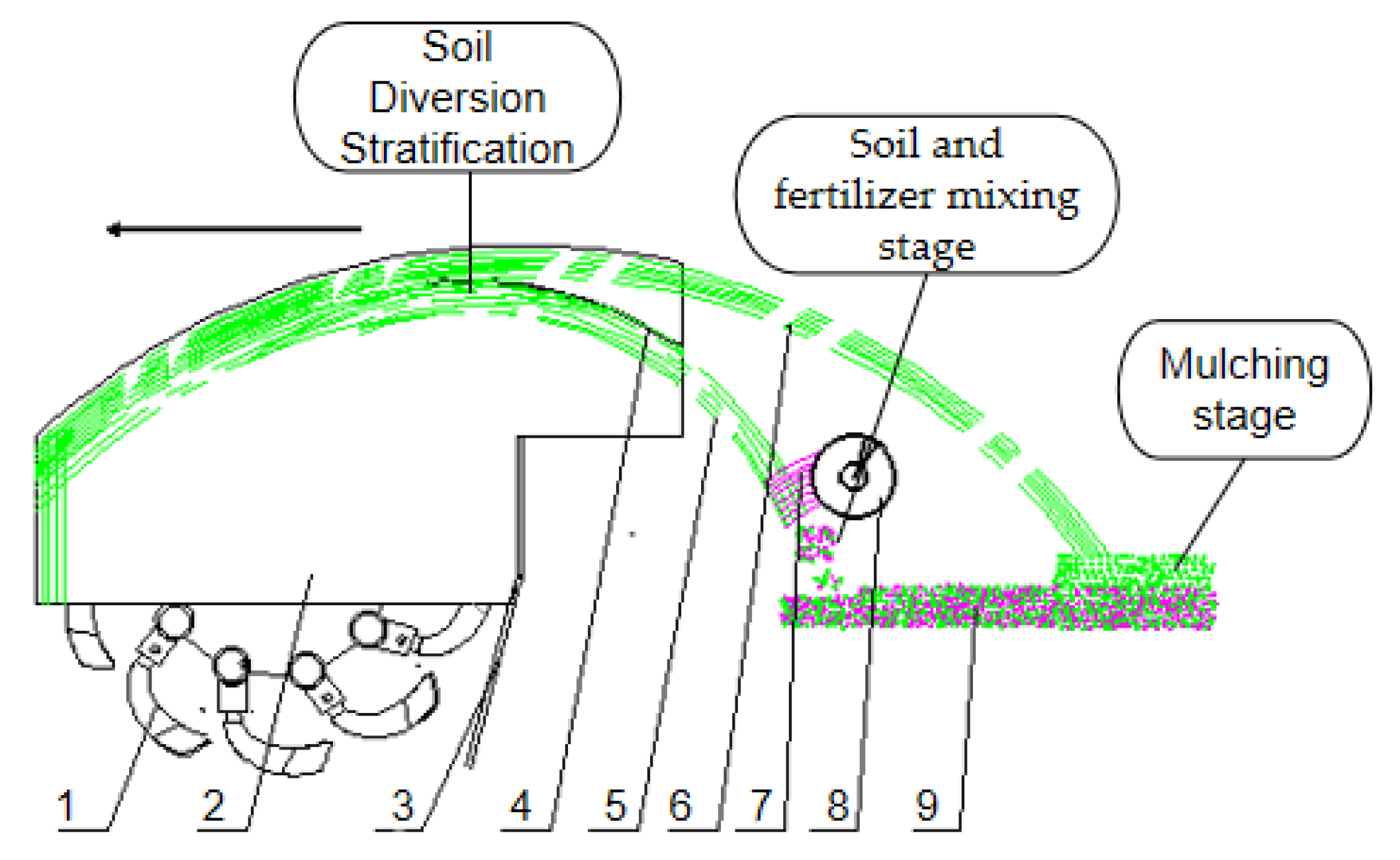
Figure 2.
Principle diagram of soil and fertilizer collision mixing mulch. 1. Ditching mechanism, 2. Deflector, 3. Ditch cleaning plate, 4. Soil dividing plate, 5. Back-throwing fertilizer mixing soil particles, 6. Back throwing of soil particles covered with fertilizer, 7. Manure particles, 8. Auger, 9. Soil fertilizer mixing layer.
Figure 2.
Principle diagram of soil and fertilizer collision mixing mulch. 1. Ditching mechanism, 2. Deflector, 3. Ditch cleaning plate, 4. Soil dividing plate, 5. Back-throwing fertilizer mixing soil particles, 6. Back throwing of soil particles covered with fertilizer, 7. Manure particles, 8. Auger, 9. Soil fertilizer mixing layer.
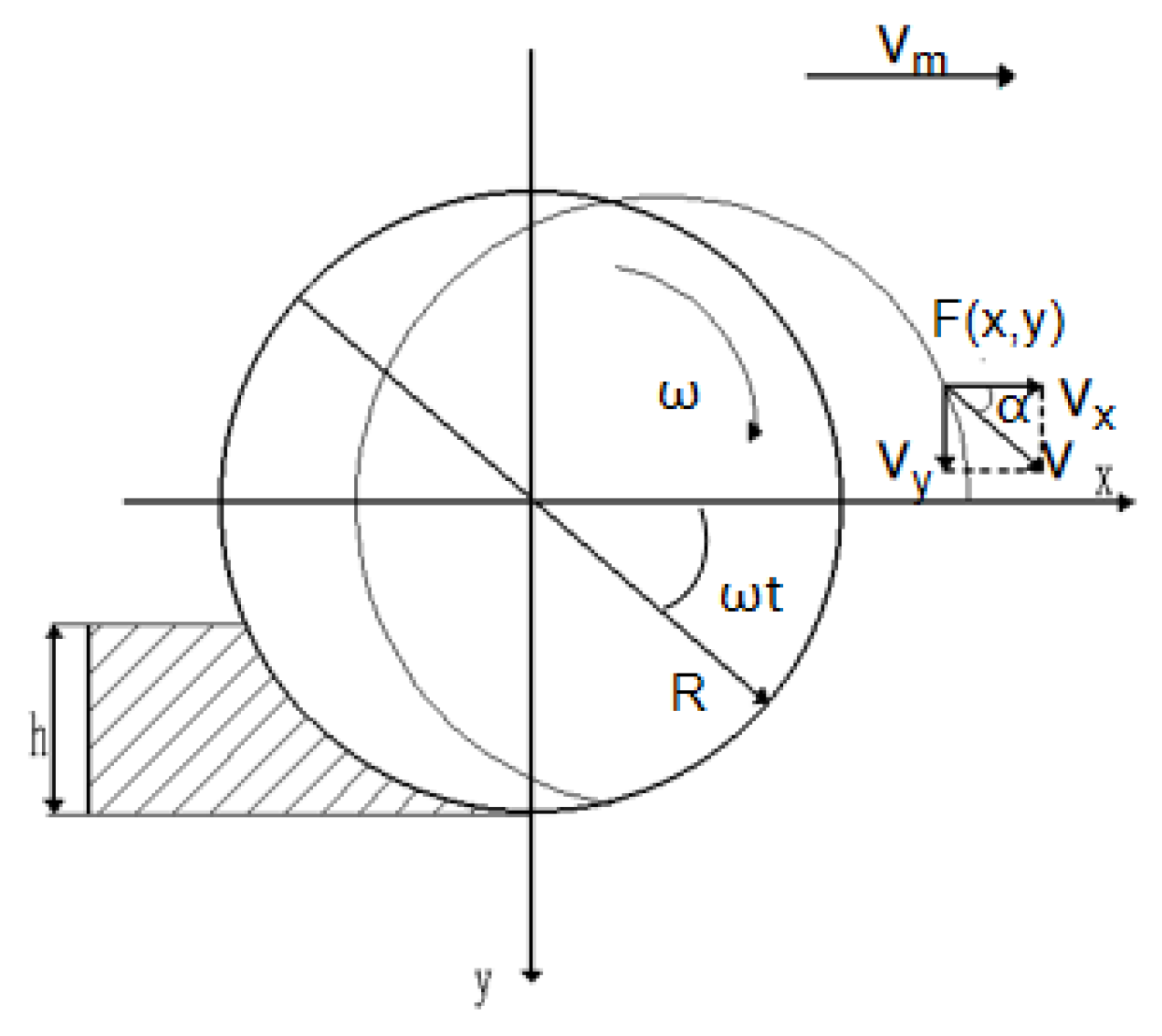
Figure 3.
Analysis of ditching tool end point motion. R—Drenching knife disc end point gyration radius, m; t—Time, s; vm—Trencher forward speed, km/h; ω—Knife shaft angular speed, rad/s.
Figure 3.
Analysis of ditching tool end point motion. R—Drenching knife disc end point gyration radius, m; t—Time, s; vm—Trencher forward speed, km/h; ω—Knife shaft angular speed, rad/s.
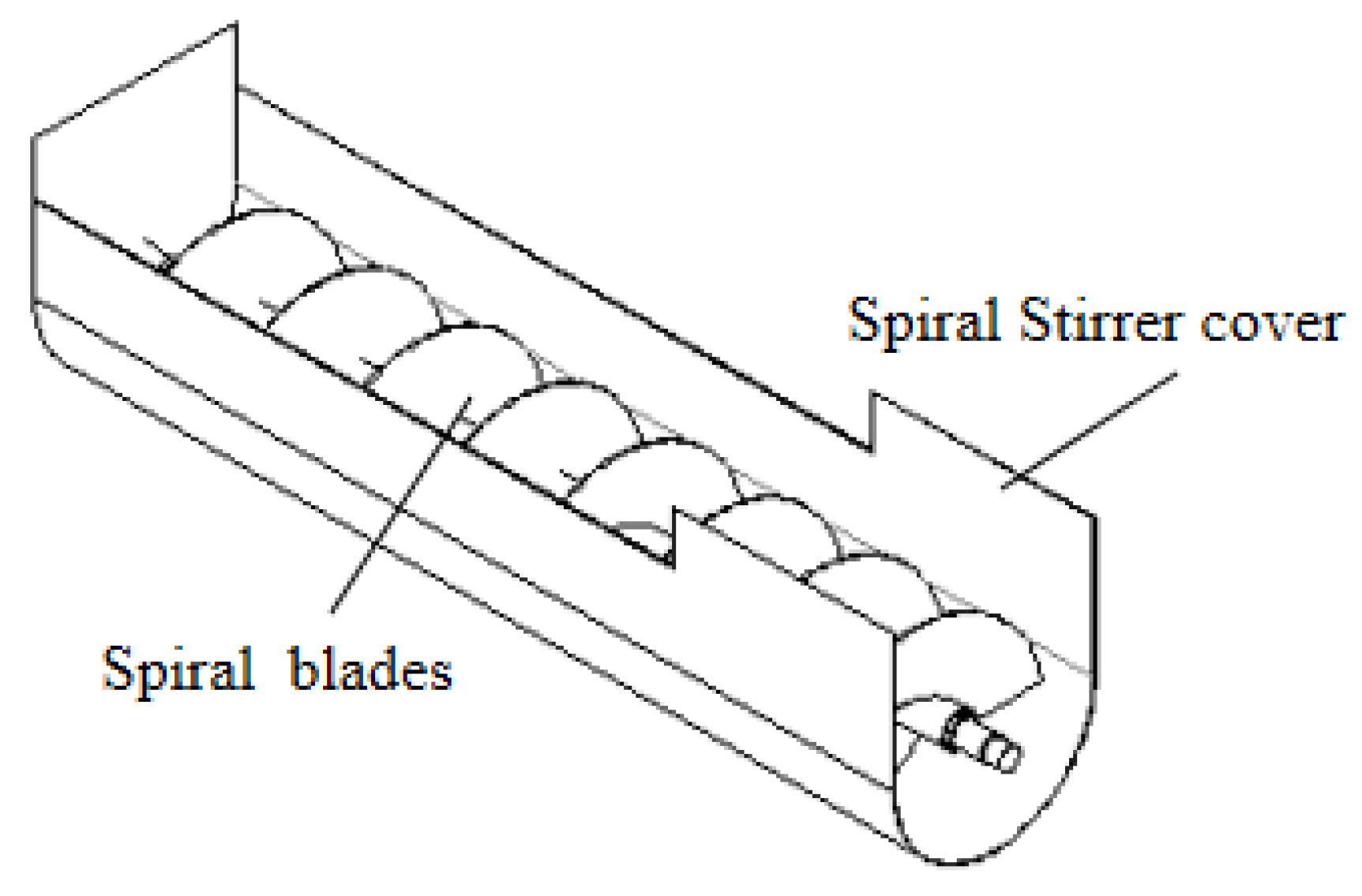
Figure 4.
Schematic diagram of the structure of screw conveying device.
Figure 4.
Schematic diagram of the structure of screw conveying device.
Figure 5.
Fertilizer speed decomposition diagram. S—pitch, mm; r—distance between the particles on the spiral surface and the spiral axis, mm; VN—implicated velocity, m/s; Va—absolute velocity, m/s; Vr—circumferential directional fractional velocity, m/s; Vz—axial directional fractional velocity, m/s; V0—initial velocity, m/s; α-spiral lift angle of the spiral blade, °; β—external friction angle of the fertilizer particles, °.
Figure 5.
Fertilizer speed decomposition diagram. S—pitch, mm; r—distance between the particles on the spiral surface and the spiral axis, mm; VN—implicated velocity, m/s; Va—absolute velocity, m/s; Vr—circumferential directional fractional velocity, m/s; Vz—axial directional fractional velocity, m/s; V0—initial velocity, m/s; α-spiral lift angle of the spiral blade, °; β—external friction angle of the fertilizer particles, °.
Figure 6.
Schematic diagram of soil separation plate structure. N1—the force of diversion surface on soil particles, N; f1—the friction force between the diversion surface and soil particles, N; F1—the normal force of trench cutter on soil particles, N; G—the gravity of soil particles, N.
Figure 6.
Schematic diagram of soil separation plate structure. N1—the force of diversion surface on soil particles, N; f1—the friction force between the diversion surface and soil particles, N; F1—the normal force of trench cutter on soil particles, N; G—the gravity of soil particles, N.
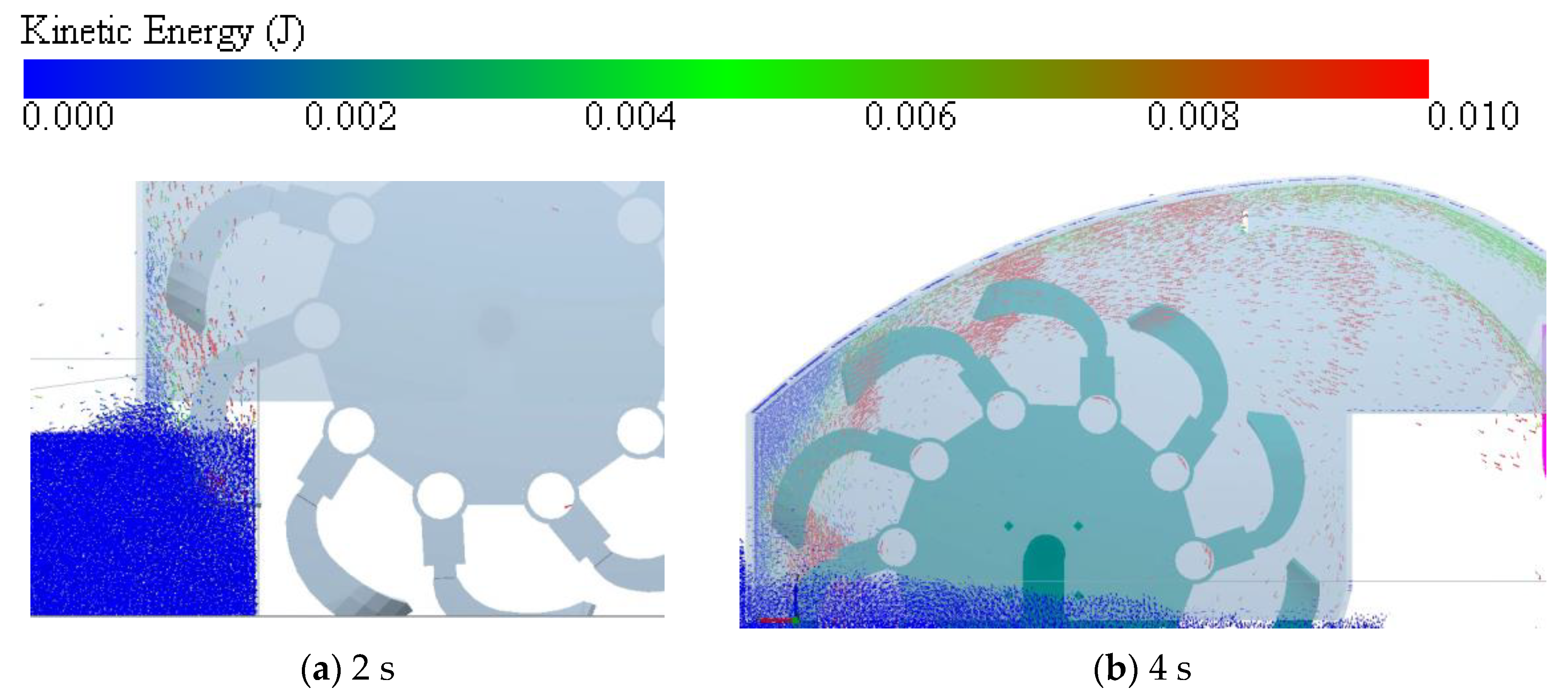
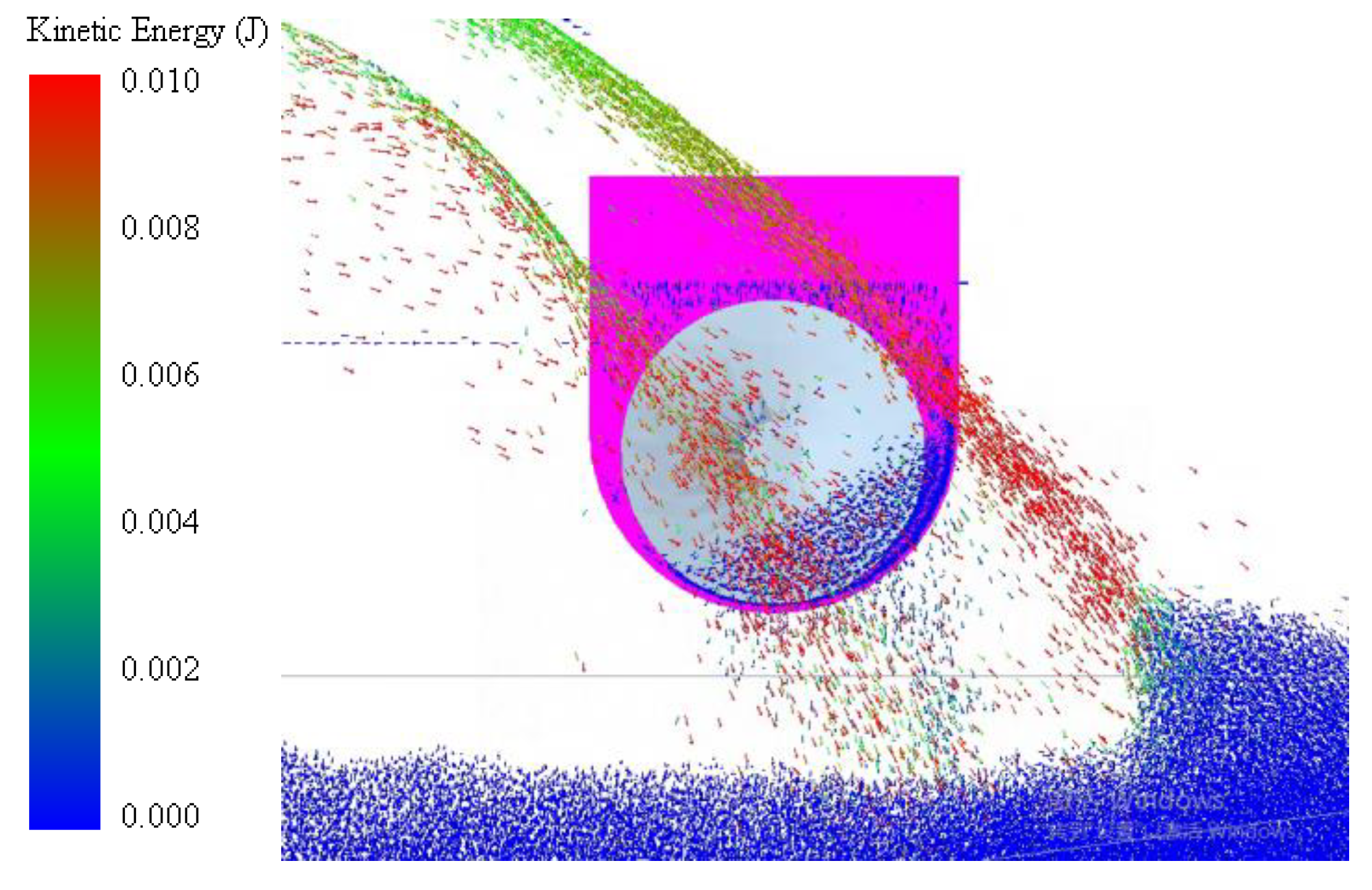
Figure 7.
Soil fertilizer collision mixing mulch kinetic energy map.
Figure 7.
Soil fertilizer collision mixing mulch kinetic energy map.
Figure 8.
Soil cutting process. (a) the rotating tillage knife was not in contact with the soil. (b) the blade-side cutting edge began to contact the soil. (c) The contact area between the ditching knife cutter and the soil becomes larger.
Figure 8.
Soil cutting process. (a) the rotating tillage knife was not in contact with the soil. (b) the blade-side cutting edge began to contact the soil. (c) The contact area between the ditching knife cutter and the soil becomes larger.
Figure 9.
Soil throwing infusion process. (a) The soil is cut and thrown into the guide cover. (b) Trajectory of soil movement in the guide cover.
Figure 9.
Soil throwing infusion process. (a) The soil is cut and thrown into the guide cover. (b) Trajectory of soil movement in the guide cover.
Figure 10.
Soil fertilizer collision mixing mulching process.
Figure 10.
Soil fertilizer collision mixing mulching process.
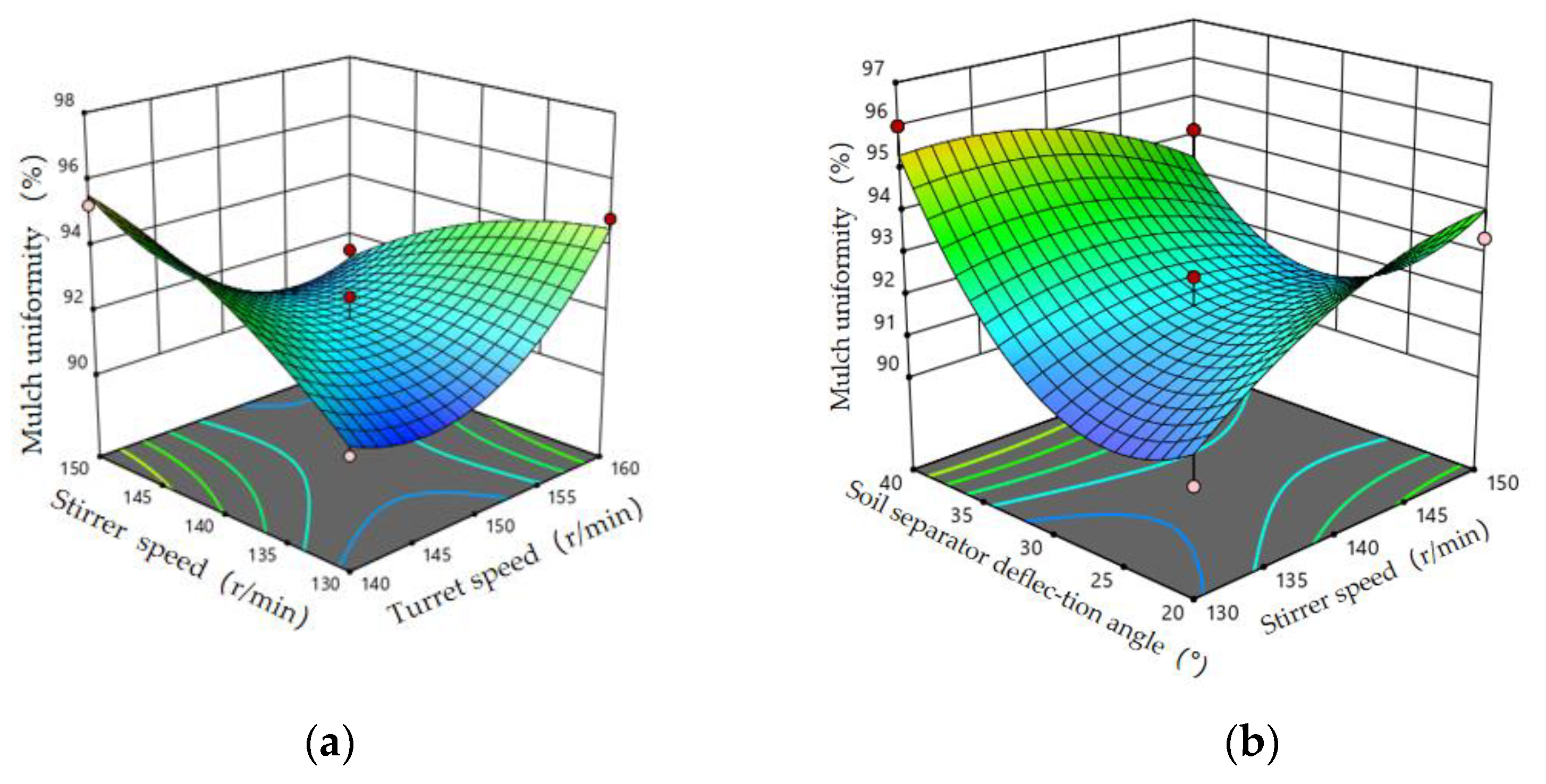
Figure 11.
Effect of interaction factor on the mulching uniformity. (a) Influence of the interaction terms between turret speed and stirrer speed on the mulching uniformity. (b) Influence of the interaction terms of Stirrer speed and soil separator deflection angle on the mulching uniformity.
Figure 11.
Effect of interaction factor on the mulching uniformity. (a) Influence of the interaction terms between turret speed and stirrer speed on the mulching uniformity. (b) Influence of the interaction terms of Stirrer speed and soil separator deflection angle on the mulching uniformity.
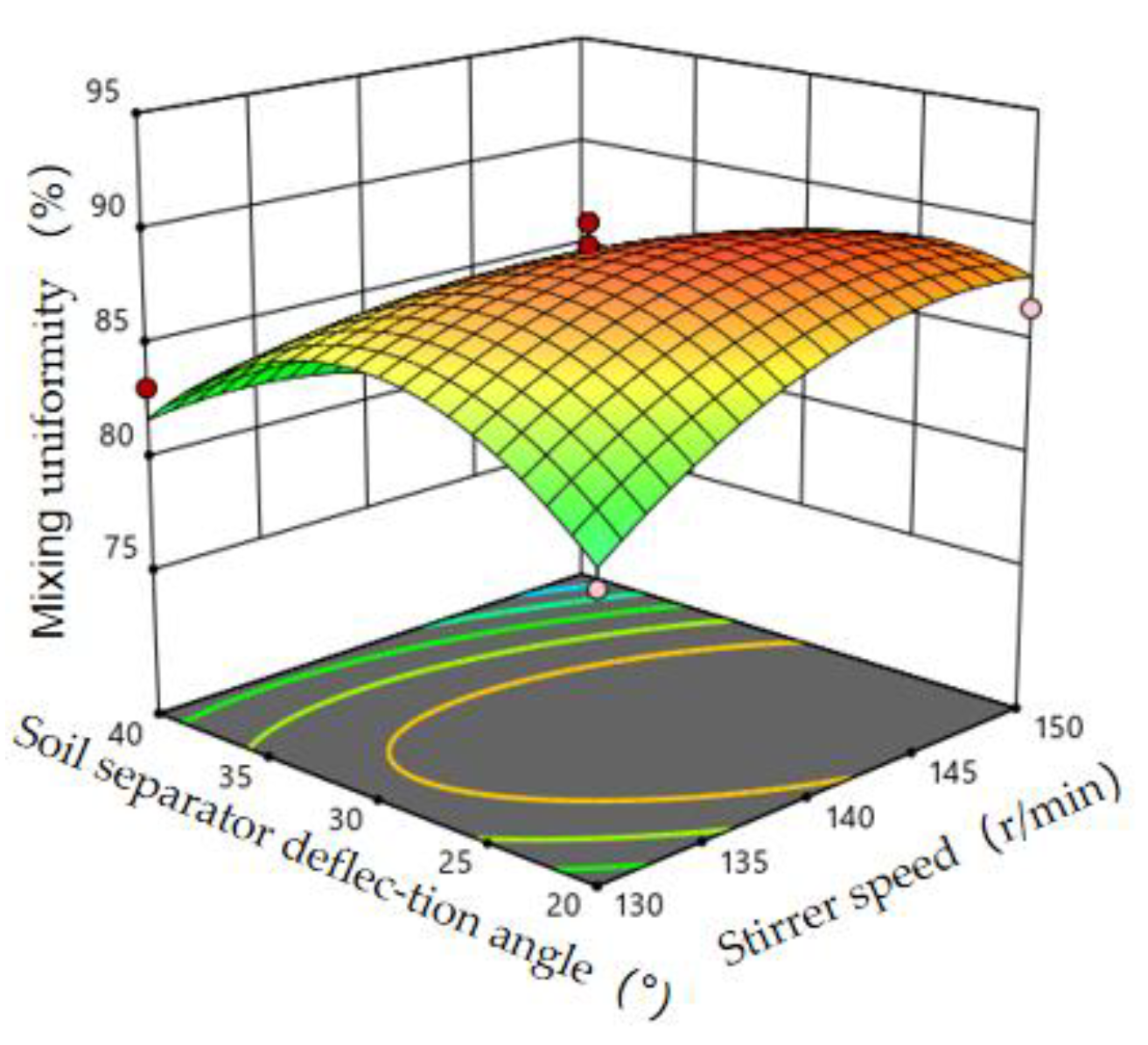
Figure 12.
Influence of the interaction terms of Stirrer speed and soil separator deflection angle on the mixing uniformity.
Figure 12.
Influence of the interaction terms of Stirrer speed and soil separator deflection angle on the mixing uniformity.
Figure 13.
Soil and fertilizer mixing whole machine test.
Figure 13.
Soil and fertilizer mixing whole machine test.
Figure 14.
Sampling process.
Figure 14.
Sampling process.
Table 1.
Main technical parameters of the whole machine.
Table 1.
Main technical parameters of the whole machine.
| Parameters | Numerical Value |
|---|
| Dimension (L × W × H) (mm) | 3500 × 2000 × 1550 |
| Matching power (kw) | 33~44 |
| Hook-up method | Semi-suspension |
| Operating speed (km/h) | ≥1.2 |
| Fertilization depth (cm) | 0~35 |
| Width of fertilizer application (cm) | 25 |
Table 2.
Discrete element parameters.
Table 2.
Discrete element parameters.
| Type | Property | Value |
|---|
| Soil | density/(g/cm3) | 2500 |
| Poisson’s ratio | 0.25 |
| Modulus of shear (Pa) | 1 × 108 |
| Soil–Soil | Superficial energy(J/m2) | 8.7 |
| Recovery factor | 0.6 |
| Static coefficient of friction | 0.6 |
| Rolling coefficient of friction | 0.4 |
| Soil–Steel | Recovery factor | 0.6 |
| Static coefficient of friction | 0.6 |
| Rolling coefficient of friction | 0.05 |
| Manure | density/(g/cm3) | 1500 |
| Poisson’s ratio | 0.25 |
| Modulus of shear (Pa) | 1 × 107 |
| Manure–Manure | Superficial energy(J/m2) | 0.02 |
| Recovery factor | 0.6 |
| Static coefficient of friction | 0.65 |
| Rolling coefficient of friction | 0.1 |
| Manure–Steel | Recovery factor | 0.6 |
| Static coefficient of friction | 0.7 |
| Rolling coefficient of friction | 0.11 |
| Manure–Soil | Superficial energy (J/m2) | 0.0225 |
| Recovery factor | 0.4 |
| Static coefficient of friction | 0.66 |
| Rolling coefficient of friction | 0.18 |
| Steel | density/(g/cm3) | 7850 |
| Poisson’s ratio | 0.3 |
| Modulus of shear (Pa) | 7.94 × 1010 |
Table 3.
Table of factor levels of the interaction test.
Table 3.
Table of factor levels of the interaction test.
| Code | Turret Speed (r/min) | Stirrer Speed (r/min) | Soil Separator Deflection Angle (°) |
|---|
| −1 | 140 | 130 | 20 |
| 0 | 150 | 140 | 30 |
| 1 | 160 | 150 | 40 |
Table 4.
Response surface test scheme and results.
Table 4.
Response surface test scheme and results.
| Test Number | Turret Speed X1/(r/min) | Stirrer Speed X2/(r/min) | Soil Separator Deflection Angle X3/(°) | Mulch Uniformity Y1/(%) | Soil and Fertilizer Mixing Uniformity Y2/(%) |
|---|
| 1 | −1 | −1 | 0 | 90.68 | 88.44 |
| 2 | 1 | −1 | 0 | 94.84 | 81.89 |
| 3 | −1 | 1 | 0 | 95.24 | 85.23 |
| 4 | 1 | 1 | 0 | 91.47 | 87.14 |
| 5 | −1 | 0 | −1 | 96.86 | 89.77 |
| 6 | 1 | 0 | −1 | 94.85 | 84.25 |
| 7 | −1 | 0 | 1 | 96.31 | 86.12 |
| 8 | 1 | 0 | 1 | 96.38 | 75.13 |
| 9 | 0 | −1 | −1 | 90.21 | 80.38 |
| 10 | 0 | 1 | −1 | 93.37 | 86.44 |
| 11 | 0 | −1 | 1 | 96.00 | 83.12 |
| 12 | 0 | 1 | 1 | 94.15 | 76.97 |
| 13 | 0 | 0 | 0 | 90.66 | 87.48 |
| 14 | 0 | 0 | 0 | 92.46 | 90.28 |
| 15 | 0 | 0 | 0 | 92.44 | 90.26 |
| 16 | 0 | 0 | 0 | 91.55 | 89.27 |
| 17 | 0 | 0 | 0 | 91.66 | 87.68 |
Table 5.
Analysis of variance for the cover uniformity back model.
Table 5.
Analysis of variance for the cover uniformity back model.
| Project | Squares | df | Mean Square Error | F | p | Significance |
|---|
| Model | 74.36 | 9 | 8.26 | 8.50 | 0.0050 | ** |
| X1 | 0.3003 | 1 | 0.3003 | 0.3090 | 0.5956 | - |
| X2 | 0.7813 | 1 | 0.7813 | 0.8039 | 0.3997 | - |
| X3 | 7.13 | 1 | 7.13 | 7.33 | 0.0303 | * |
| X1×2 | 15.72 | 1 | 15.72 | 16.18 | 0.0050 | ** |
| X1X3 | 1.08 | 1 | 1.08 | 1.11 | 0.3265 | - |
| X2X3 | 6.28 | 1 | 6.28 | 6.46 | 0.0386 | * |
| X12 | 16.60 | 1 | 16.60 | 17.08 | 0.0044 | ** |
| X22 | 1.96 | 1 | 1.96 | 2.02 | 0.1987 | - |
| X32 | 23.46 | 1 | 23.46 | 24.14 | 0.0017 | ** |
| Residual | 6.80 | 7 | 0.9718 | | | |
| Lack of Fit | 4.59 | 3 | 1.53 | 2.76 | 0.1759 | - |
| Pure Error | 2.22 | 4 | 0.5541 | | | |
| Cor Total | 81.16 | 16 | | | | |
Table 6.
Regression model analysis of variance for soil fertilizer mixing uniformity.
Table 6.
Regression model analysis of variance for soil fertilizer mixing uniformity.
| Project | Squares | df | Mean Square Error | F | p | Significance |
|---|
| Model | 300.78 | 9 | 33.42 | 8.36 | 0.0053 | ** |
| X1 | 41.18 | 1 | 41.18 | 10.31 | 0.0149 | * |
| X2 | 0.4753 | 1 | 0.4753 | 0.119 | 0.7403 | - |
| X3 | 63.28 | 1 | 63.28 | 15.84 | 0.0053 | ** |
| X1X2 | 17.89 | 1 | 17.89 | 4.48 | 0.0721 | - |
| X1X3 | 1.53 | 1 | 1.53 | 0.3817 | 0.5562 | - |
| X2X3 | 37.27 | 1 | 37.27 | 9.33 | 0.0185 | * |
| X12 | 4.12 | 1 | 4.12 | 1.03 | 0.3436 | - |
| X22 | 22.85 | 1 | 22.85 | 5.72 | 0.0481 | * |
| X32 | 102.63 | 1 | 102.63 | 25.69 | 0.0015 | ** |
| Residual | 27.97 | 7 | 4 | | | |
| Lack of Fit | 20.62 | 3 | 6.87 | 3.74 | 0.1176 | - |
| Pure Error | 7.35 | 4 | 1.84 | | | |
| Cor Total | 328.75 | 16 | | | | |
Table 7.
Optimal parameter combination scheme.
Table 7.
Optimal parameter combination scheme.
| | Turret Speed/(r/min) | Stirrer Shaft Speed/(r/min) | Soil Separator Deflection Angle/(°) | Mulch Uniformit/(%) | Soil and Fertilizer Mixing Uniformit/(%) |
|---|
| Numerical value | 140 | 146 | 22 | 96.86 | 88.35 |
Table 8.
Optimization results test values.
Table 8.
Optimization results test values.
| Number of Tests | Soil Quality of Fertilizer cover/g | Mass of Soil–Fertilizer Mixture/g | Tracer Particle Mass/g | Mulch Uniformity/% | Soil and Fertilizer Mixing Uniformity/% |
|---|
| 1 | 1622.5 | 5800 | 23 | 94.37 | 87.02 |
| 2 | 1703.5 | 6061 | 19 |
| 3 | 1554 | 5558 | 18.5 |
| 4 | 1616.5 | 5473 | 24.5 |
| 5 | 1751.5 | 5864 | 19 |
| 6 | 1538 | 5751 | 19.6 |
| 7 | 1776 | 6647 | 21.5 |
| 8 | 1797 | 5448 | 20 |
| 9 | 1584.5 | 5808 | 20.3 |
| 10 | 1631 | 5429 | 23 |
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}