
An Infrared Temperature Correction Method for the Skin Temperature of Pigs in Infrared Images
Abstract
:1. Introduction
2. Methodology and Materials
2.1. The Affecting Parameters Identification
2.2. Response Surface Methodology Modelling
2.2.1. Experimental Variables and Response
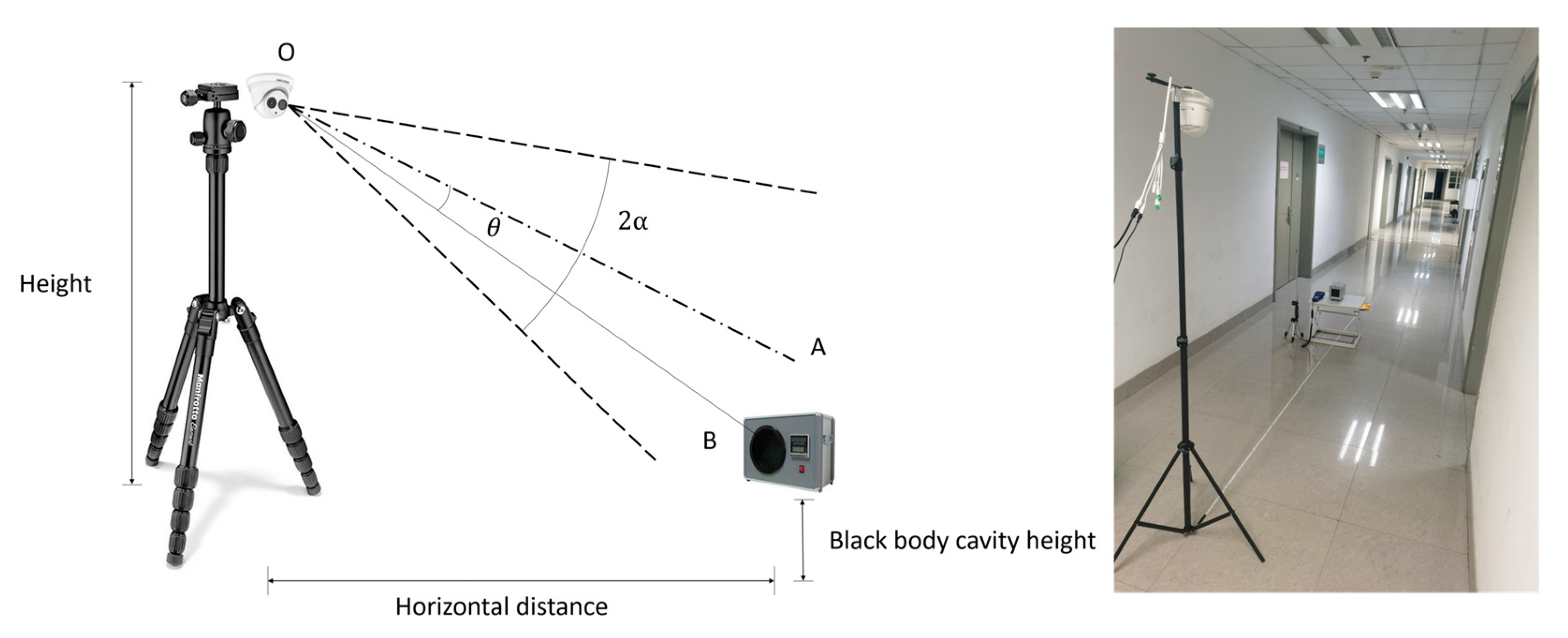
2.2.2. Setup of the Laboratory Experiment
2.2.3. Establishment of RSM Model
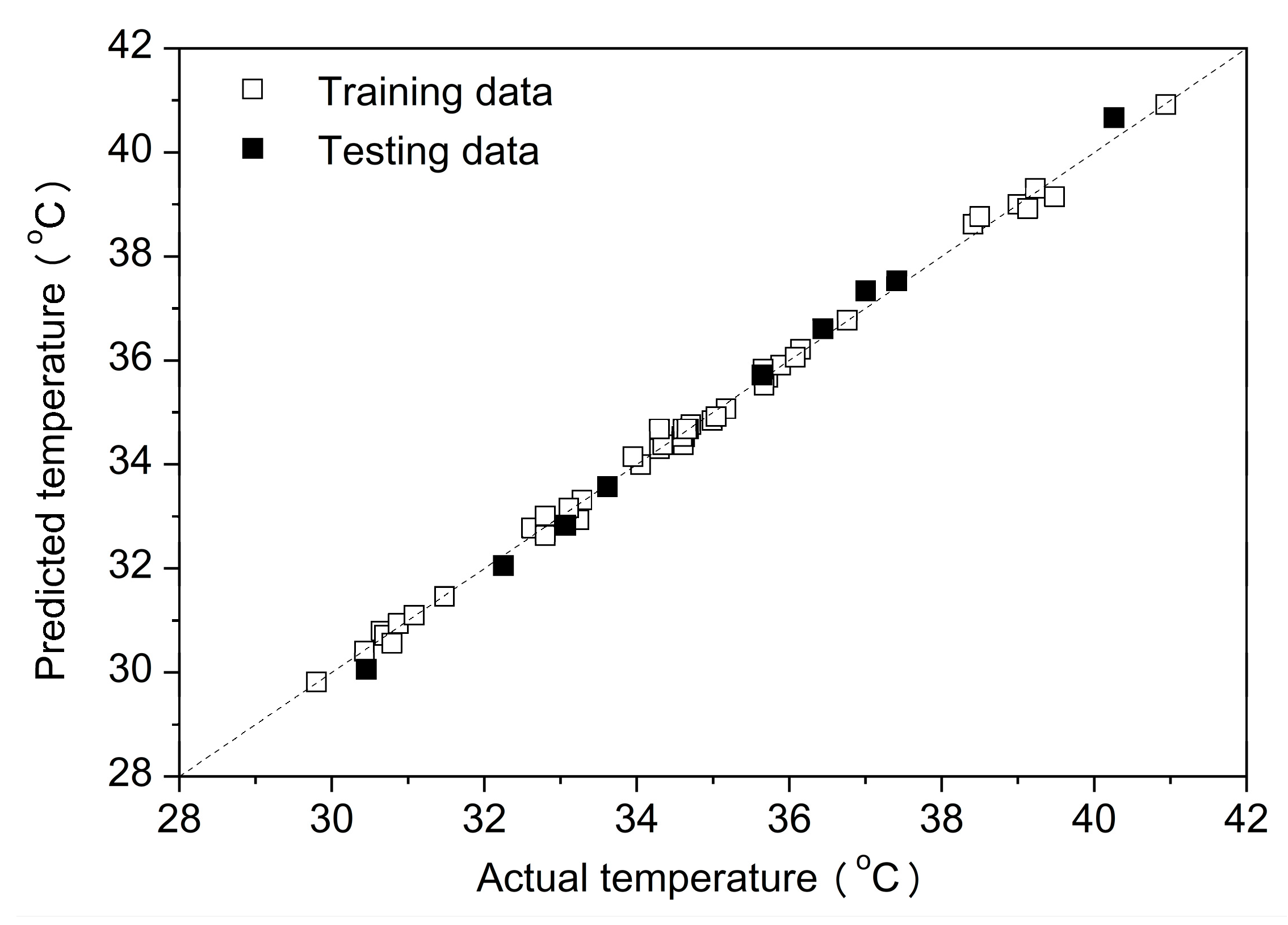
2.2.4. RSM Model Verification
2.3. Correction Algorithm
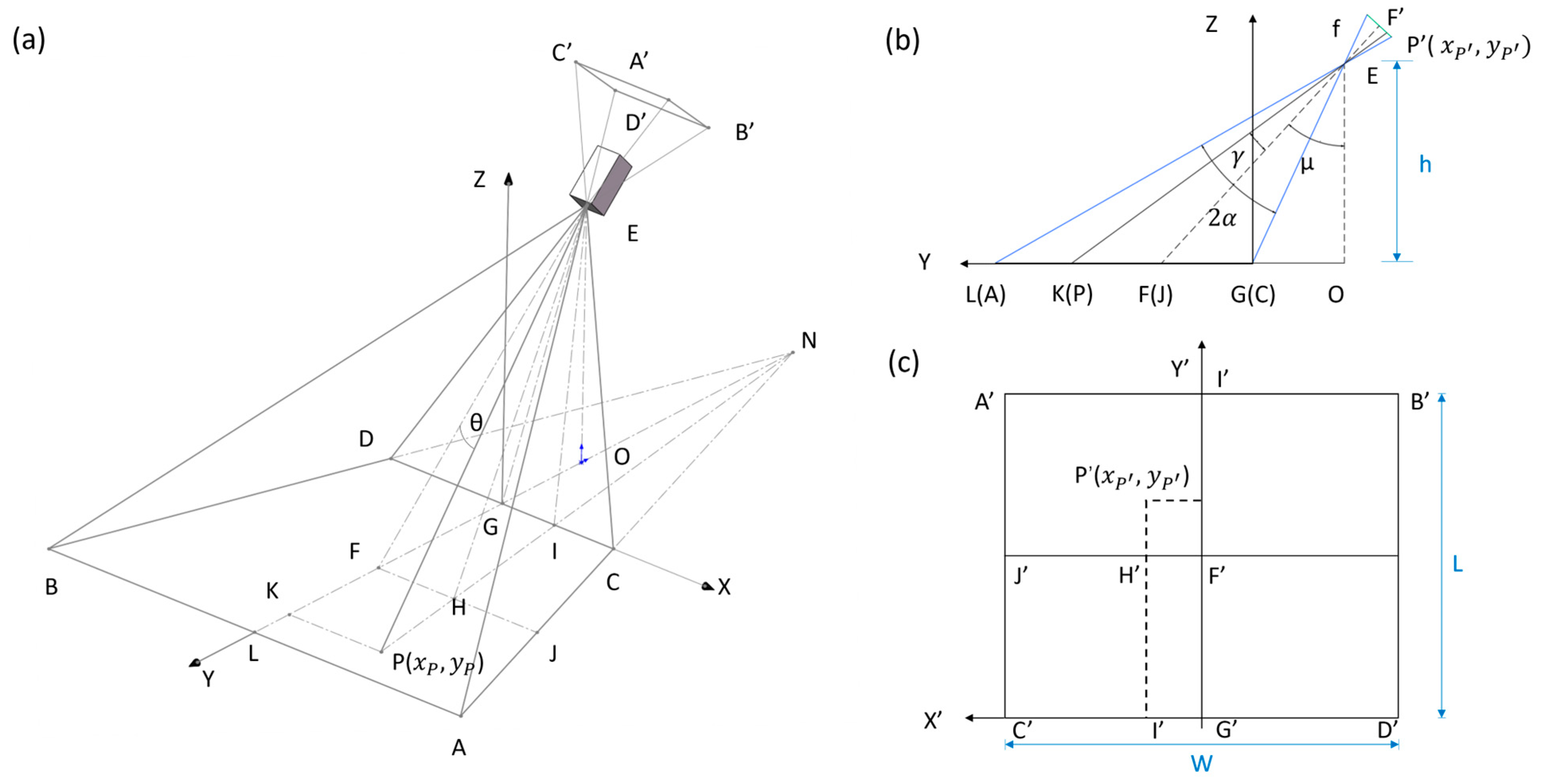
2.3.1. Distance Determination
- Determine yP of point P.
- 2.
- Determine xP of point P.
- 3.
- Determine the horizontal distance between camera and object.
2.3.2. Determination of the Angle of View
2.3.3. Correction Algorithm Development
2.4. Case Study
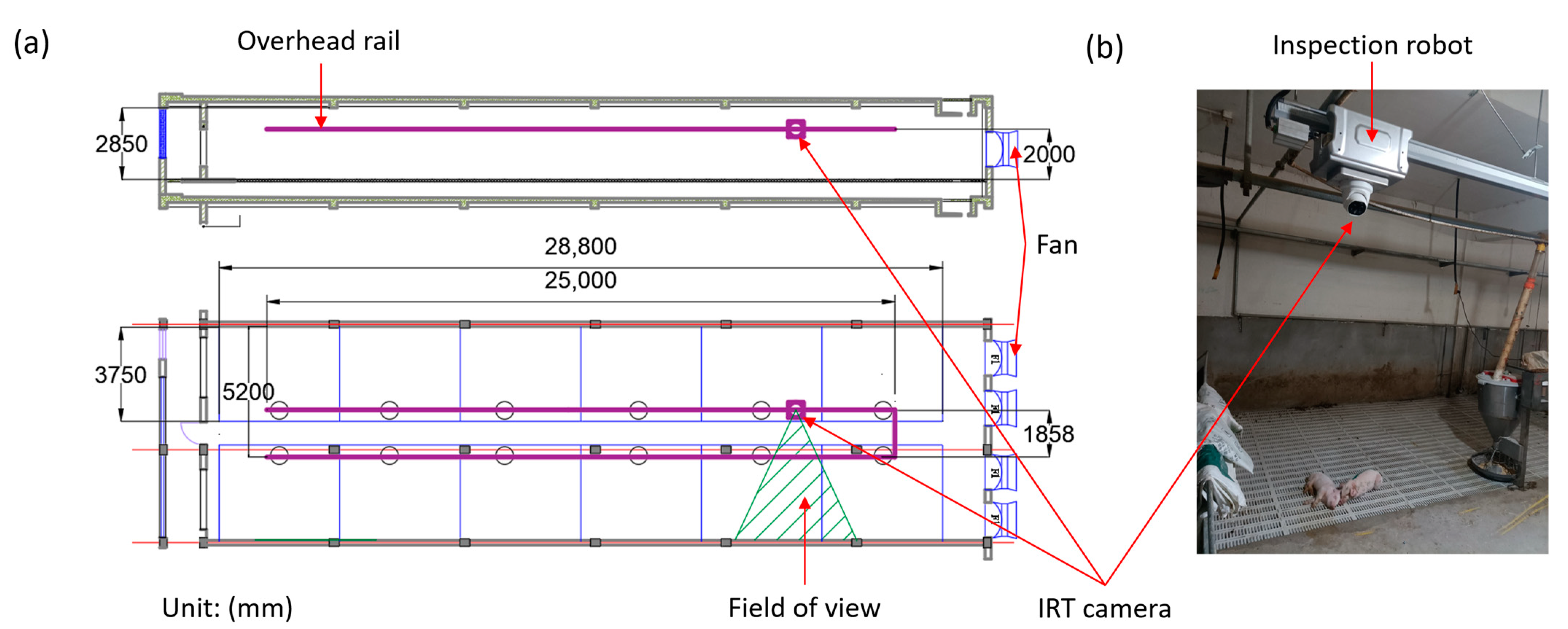
2.4.1. Experimental Barn and Animal
2.4.2. Infrared Thermography System in Pig Building
2.4.3. Setup of the Field Experiment
2.4.4. Comparison Criteria
3. Results and Discussion
3.1. RSM Model
3.1.1. RSM Model Development
3.1.2. RSM Model Verification
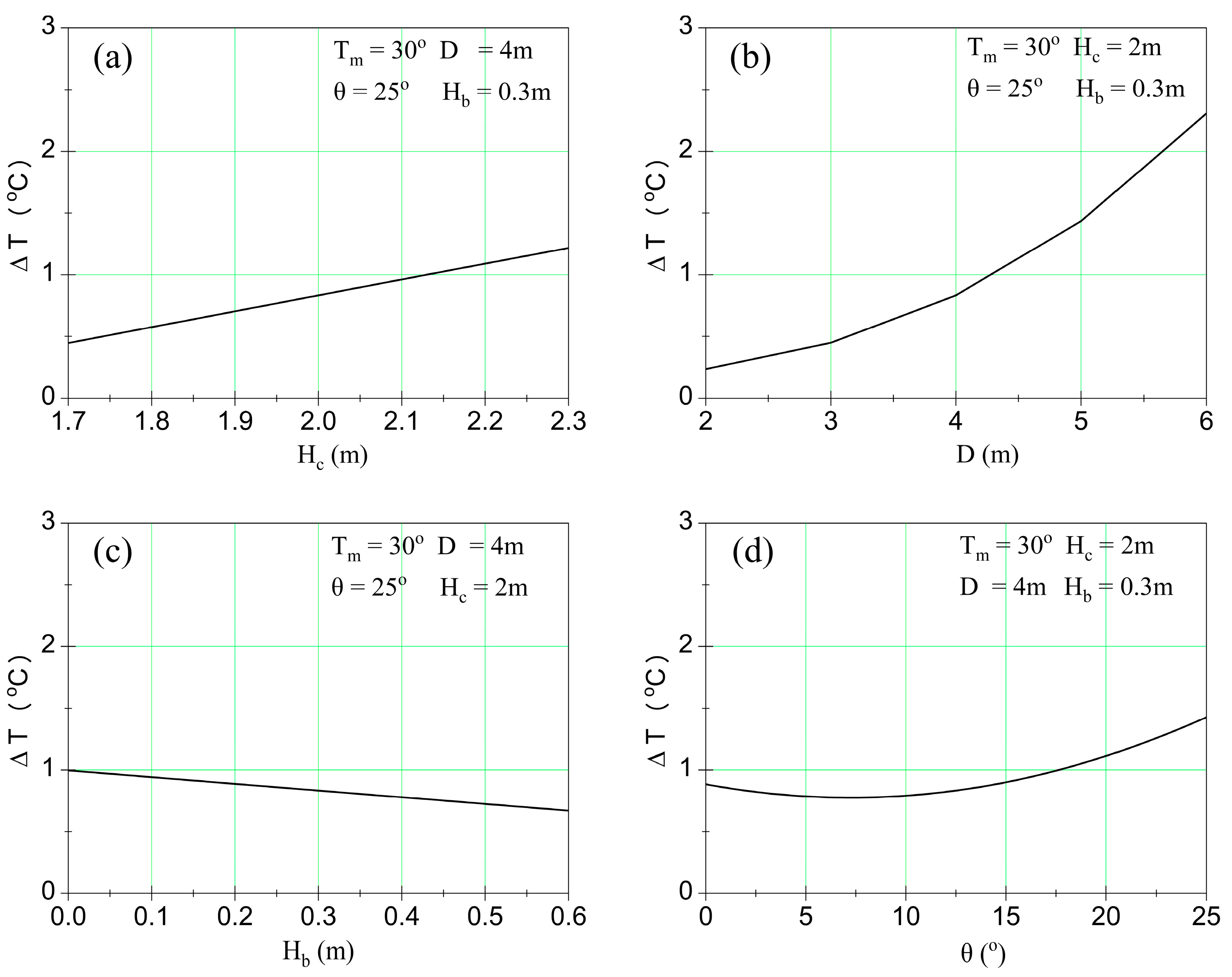
3.2. Effect of the Parameters on Surface Temperature Detection
3.3. Performance of the Correction Method
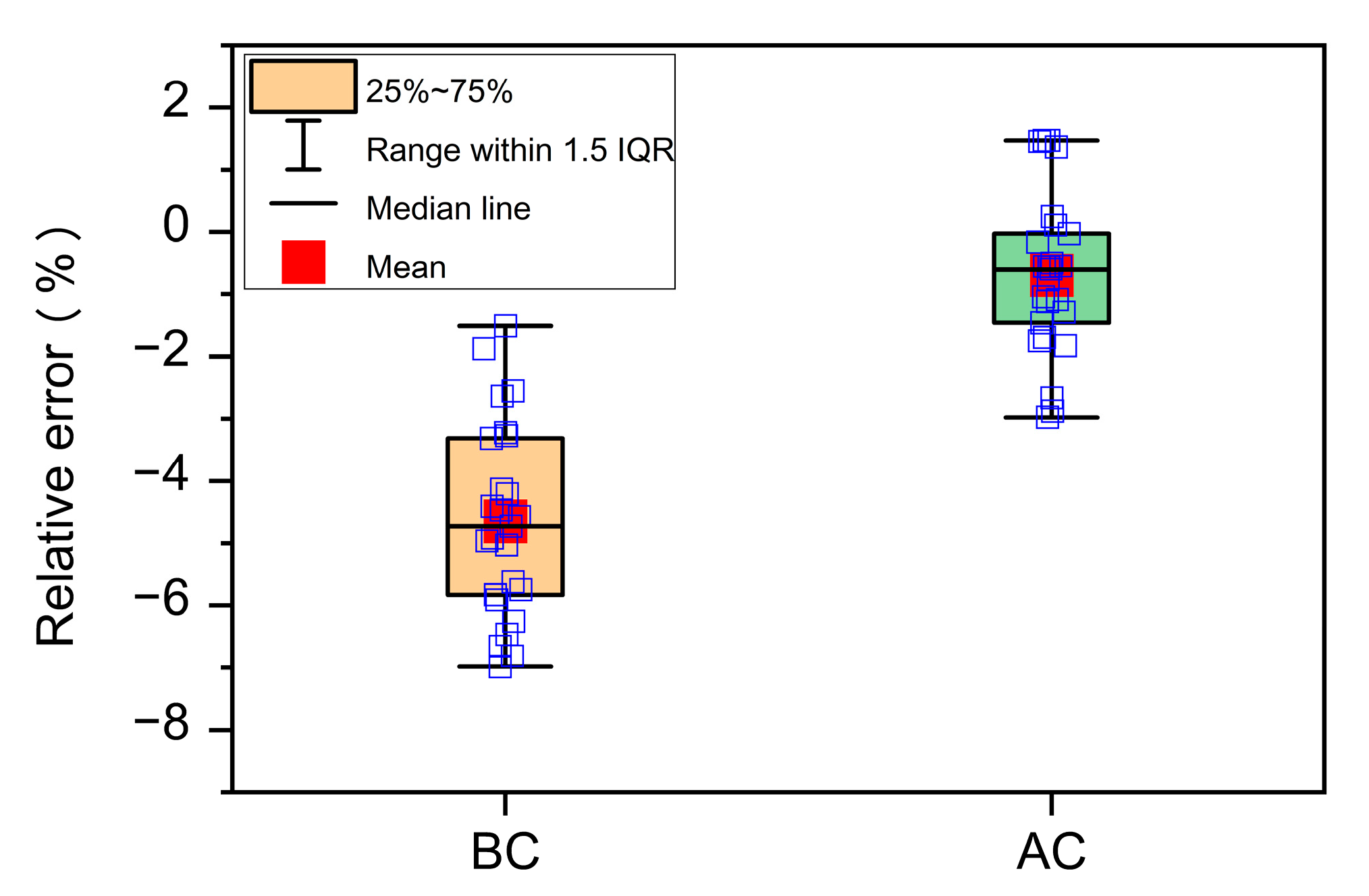
3.3.1. Comparison between Skin Temperature before and after Correction
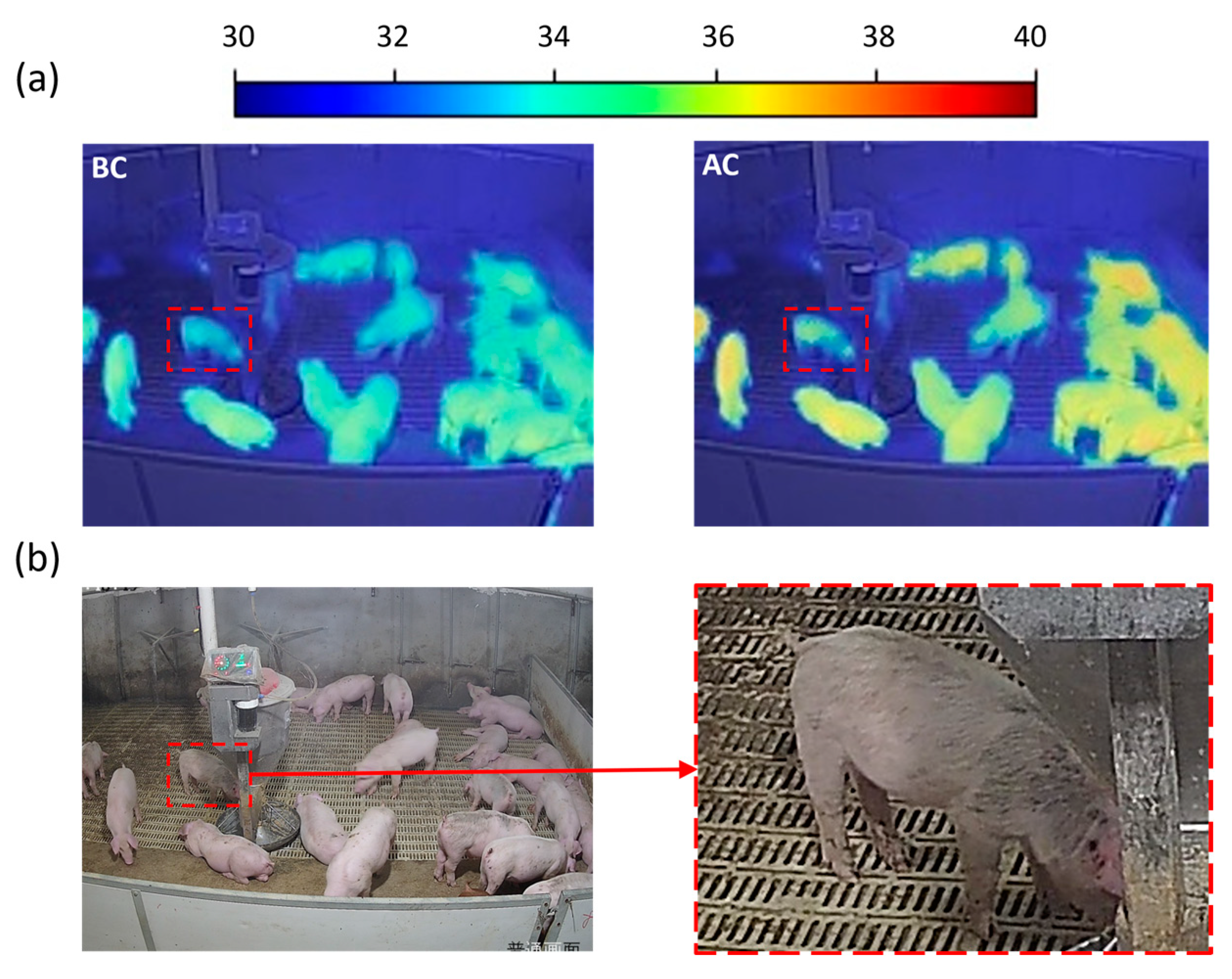
3.3.2. Comparison between IRT Images
3.4. Limitations and Perspectives
4. Conclusions
- Response surface methodology can be applied in the modeling of the relationship between the actual skin temperature and the affecting parameters, along with the monocular ranging being applied in the determination of the observation distance.
- The observation distance significantly affects the accuracy of the skin temperature measurement. The horizontal distance, the camera height, and the angle of view between the camera and the object positively affect the accuracy between the measurements and the actual skin temperatures, while the heights of pigs negatively affect the accuracy between the measurements and the actual skin temperatures.
- A skin temperature correction algorithm was developed and evaluated using field-measured data. The average relative error of measured skin temperatures before the correction was −4.63%, and the corresponding mean relative error after the correction was reduced to −0.25%.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Rae, A.N.; Ma, H.; Huang, J.; Rozelle, S. Livestock in China: Commodity-Specific Total Factor Productivity Decomposition Using New Panel Data. Am. J. Agric. Econ. 2006, 88, 680–695. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Gao, L.; Li, Y.; Xu, Q.; Yang, H.; Shen, C.; Huang, B. African swine fever in China: Emergence and control. J. Biosaf. Biosecurity 2019, 1, 7–8. [Google Scholar] [CrossRef]
- Gao, L.; Sun, X.; Yang, H.; Xu, Q.; Li, J.; Kang, J.; Liu, P.; Zhang, Y.; Wang, Y.; Huang, B. Epidemic situation and control measures of African Swine Fever Outbreaks in China 2018–2020. Transbound. Emerg. Dis. 2021, 68, 2676–2686. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.; Luo, R.; Sun, Y.; Qiu, H.-J. Current efforts towards safe and effective live attenuated vaccines against African swine fever: Challenges and prospects. Infect. Dis. Poverty 2021, 10, 137. [Google Scholar] [CrossRef] [PubMed]
- Tao, D.; Sun, D.; Liu, Y.; Wei, S.; Yang, Z.; An, T.; Shan, F.; Chen, Z.; Liu, J. One year of African swine fever outbreak in China. Acta Trop. 2020, 211, 105602. [Google Scholar] [CrossRef]
- Pusnik, I.; Stukelj, M. Usefulness of thermovision for pig welfare. Elektrotehniski Vestn. 2019, 86, 77–82. [Google Scholar]
- Jorquera-Chavez, M.; Fuentes, S.; Dunshea, F.R.; Warner, R.D.; Poblete, T.; Morrison, R.S.; Jongman, E.C. Remotely Sensed Imagery for Early Detection of Respiratory Disease in Pigs: A Pilot Study. Animals 2020, 10, 451. [Google Scholar] [CrossRef] [Green Version]
- Hwang, S.W.; Choi, Y.S.; Lee, S.J.; Yang, S.H. An Analysis on ASF Variations and Temperature. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 5–8 May 2014; pp. 882–885. [Google Scholar]
- Escuredo, J.A.M.; Carr, J.; Dizon, R.; Howells, M. Using infrared thermography to help maintain pig health. Practice 2021, 43, 388–396. [Google Scholar] [CrossRef]
- Soerensen, D.D.; Pedersen, L.J. Infrared skin temperature measurements for monitoring health in pigs: A review. Acta Vet. Scand. 2015, 57, 5. [Google Scholar] [CrossRef] [Green Version]
- Zhong, Z. A novel visible and infrared image fusion method based on convolutional neural network for pig-body feature detection. Multimed. Tools Appl. 2021, 81, 2757–2775. [Google Scholar] [CrossRef]
- Sa, J.; Choi, Y.; Lee, H.; Chung, Y.; Park, D.; Cho, J. Fast Pig Detection with a Top-View Camera under Various Illumination Conditions. Symmetry 2019, 11, 266. [Google Scholar] [CrossRef]
- Shirley, L.K.; Field, T.; Schinckel, A.P.; Johnson, J.S.; Stwalley, R.; Stewart, K.R. 80 Use of an Electronically-controlled Floor Cooling Pad During Heat Stress on Thermoregulatory and Reproductive Performance in Boars. J. Anim. Sci. 2021, 99, 107. [Google Scholar] [CrossRef]
- Da Fonseca, F.N.; Abe, J.M.; Nääs, I.D.A.; Cordeiro, A.F.D.S.; Amaral, F.V.D.; Ungaro, H.C. Automatic prediction of stress in piglets (Sus Scrofa) using infrared skin temperature. Comput. Electron. Agric. 2019, 168, 105148. [Google Scholar] [CrossRef]
- Choudhury, M.; Saikia, T.; Banik, S.; Patil, G.; Pegu, S.R.; Rajkhowa, S.; Sen, A.; Das, P.J. Infrared imaging a new non-invasive machine learning technology for animal husbandry. Imaging Sci. J. 2020, 68, 240–249. [Google Scholar] [CrossRef]
- Tattersall, G.J. Infrared thermography: A non-invasive window into thermal physiology. Comp. Biochem. Physiol. Part A Mol. Integr. Physiol. 2016, 202, 78–98. [Google Scholar] [CrossRef]
- Playa-Montmany, N.; Tattersall, G.J. Spot size, distance and emissivity errors in field applications of infrared thermography. Methods Ecol. Evol. 2021, 12, 828–840. [Google Scholar] [CrossRef]
- Faye, E.; Dangles, O.; Pincebourde, S. Distance makes the difference in thermography for ecological studies. J. Therm. Biol. 2016, 56, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Arenas, A.J.; Gómez, F.; Salas, R.; Carrasco, P.; Borge, C.; Maldonado, A.; O’Brien, D.J.; Martínez-Moreno, F. An evaluation of the application of infrared thermal imaging to the tele-diagnosis of sarcoptic mange in the Spanish ibex (Capra pyrenaica). Vet. Parasitol. 2002, 109, 111–117. [Google Scholar] [CrossRef]
- Zhang, C.; Xiao, D.; Yang, Q.; Wen, Z.; Lv, L. Review: Application of Infrared Thermography in Livestock Monitoring. Trans. ASABE 2020, 63, 389–399. [Google Scholar] [CrossRef]
- Church, J.; Hegadoren, P.; Paetkau, M.; Miller, C.; Regev-Shoshani, G.; Schaefer, A.; Schwartzkopf-Genswein, K. Influence of environmental factors on infrared eye temperature measurements in cattle. Res. Vet. Sci. 2014, 96, 220–226. [Google Scholar] [CrossRef]
- Harrap, M.J.M.; de Ibarra, N.H.; Whitney, H.M.; Rands, S.A. Reporting of thermography parameters in biology: A systematic review of thermal imaging literature. R. Soc. Open Sci. 2018, 5, 181281. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Soerensen, D.D.; Clausen, S.; Mercer, J.B.; Pedersen, L.J. Determining the emissivity of pig skin for accurate infrared ther-mography. Comput. Electron. Agric. 2014, 109, 52–58. [Google Scholar] [CrossRef]
- Zhang, K.; Jiao, L.; Zhao, X.; Dong, D. An instantaneous approach for determining the infrared emissivity of swine surface and the influencing factors. J. Therm. Biol. 2016, 57, 78–83. [Google Scholar] [CrossRef]
- Muniz, P.R.; Magalhães, R.D.S.; Cani, S.P.N.; Donadel, C.B. Non-contact measurement of angle of view between the inspected surface and the thermal imager. Infrared Phys. Technol. 2015, 72, 77–83. [Google Scholar] [CrossRef]
- Zhou, Z.; Wei, X.; Xie, T.; Tang, Z.; Cui, H. Influence of Observation Distance and Angle of View on the Detection Accuracy of Infrared Thermal Radiation. Infrared Technol. 2017, 39, 86–90. [Google Scholar]
- Muniz, P.R.; Cani, S.P.N.; Magalhaes, R.D.S. Influence of Field of View of Thermal Imagers and Angle of View on Temperature Measurements by Infrared Thermovision. IEEE Sens. J. 2013, 14, 729–733. [Google Scholar] [CrossRef]
- Baş, D.; Boyacı, İ.H. Modeling and optimization I: Usability of response surface methodology. J. Food Eng. 2007, 78, 836–845. [Google Scholar] [CrossRef]
- Madzimure, J.; Chimonyo, M.; Zander, K.; Dzama, K. Diurnal heat-related physiological and behavioural responses in South African indigenous gilts. J. Arid. Environ. 2012, 87, 29–34. [Google Scholar] [CrossRef]
- Chung, T.-H.; Jung, W.-S.; Nam, E.-H.; Kim, J.-H.; Park, S.-H.; Hwang, C.-Y. Comparison of Rectal and Infrared Thermometry for Obtaining Body Temperature of Gnotobiotic Piglets in Conventional Portable Germ Free Facility. Asian-Australas. J. Anim. Sci. 2010, 23, 1364–1368. [Google Scholar] [CrossRef]
- Oh, S.-I.; Lee, H.S.; Bui, V.N.; Dao, D.T.; Bui, N.A.; Le, T.D.; Kieu, M.A.; Nguyen, Q.H.; Tran, L.H.; So, K.-M.; et al. Dynamic Variations in Infrared Skin Temperature of Weaned Pigs Experimentally Inoculated with the African Swine Fever Virus: A Pilot Study. Vet. Sci. 2021, 8, 223. [Google Scholar] [CrossRef]
- Baxter, S.H. Intensive Pig Production: Environmental Management and Design; Granada Publishing Ltd.: London, UK, 1984; p. 588. [Google Scholar]
- Ferreira, S.L.C.; Bruns, R.E.; Ferreira, H.S.; Matos, G.D.; David, J.M.; Brandão, G.C.; da Silva, E.G.P.; Portugal, L.A.; dos Reis, P.S.; Souza, A.S.; et al. Box-Behnken design: An alternative for the optimization of analytical methods. Anal. Chim. Acta 2007, 597, 179–186. [Google Scholar] [CrossRef]
- Myers, R.H.; Montgomery, D.C.; Anderson-Cook, C. Response Surface Methodology: Process and Product Optimization Using Designed Experiments; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Box, G.E.; Cox, D.R. An analysis of transformations. J. R. Stat. Soc. Ser. B (Methodol.) 1964, 26, 211–252. [Google Scholar] [CrossRef]
- Shen, X.; Zhang, G.; Bjerg, B. Investigation of response surface methodology for modelling ventilation rate of a naturally ven-tilated building. Build. Environ. 2012, 54, 174–185. [Google Scholar] [CrossRef]
- Cheng, Y.H.; Wang, S.N.; Yu, D.H. Optimal Design of Monocular Stereo Vision System. In Proceedings of the 16th IEEE International Conference on Mechatronics and Automation (IEEE ICMA), Tianjin, China, 4–7 August 2019; pp. 1022–1027. [Google Scholar]
- Rezaei, M.; Terauchi, M.; Klette, R. Robust Vehicle Detection and Distance Estimation Under Challenging Lighting Conditions. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2723–2743. [Google Scholar] [CrossRef]
- Kim, J.B. Efficient Vehicle Detection and Distance Estimation Based on Aggregated Channel Features and Inverse Perspective Mapping from a Single Camera. Symmetry 2019, 11, 1205. [Google Scholar] [CrossRef] [Green Version]
- Shen, C.; Zhao, X.; Liu, Z.; Gao, T.; Xu, J. Joint vehicle detection and distance prediction via monocular depth estimation. IET Intell. Transp. Syst. 2020, 14, 753–763. [Google Scholar] [CrossRef]
- Litwa, M. Influence of Angle of View on Temperature Measurements Using Thermovision Camera. IEEE Sens. J. 2010, 10, 1552–1554. [Google Scholar] [CrossRef]
- LokeshBabu, L.; Jeyakumar, S.; Vasant, P.J.; Sathiyabarathi, M.; Manimaran, A.; Kumaresan, A.; Pushpadass, H.A.; Sivaram, M.; Ramesha, K.; Kataktalware, M.A.; et al. Monitoring foot surface temperature using infrared thermal imaging for assessment of hoof health status in cattle: A review. J. Therm. Biol. 2018, 78, 10–21. [Google Scholar] [CrossRef]
- Stokes, J.; Leach, K.; Main, D.; Whay, H. An investigation into the use of infrared thermography (IRT) as a rapid diagnostic tool for foot lesions in dairy cattle. Vet. J. 2012, 193, 674–678. [Google Scholar] [CrossRef]
- Abudabos, A.M.; Samara, E.M.; Hussein, E.O.S.; Al-Ghadi, M.Q.; Al-Atiyat, R.M. Impacts of Stocking Density on the Per-formance and Welfare of Broiler Chickens. Ital. J. Anim. Sci. 2013, 12, e11. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | Low Level | Medium Level | High Level |
|---|---|---|---|---|
| D | m | 2 | 4 | 6 |
| Hc | m | 1.7 | 2 | 2.3 |
| θ | ° | 0 | 25 | 50 |
| Tb | °C | 32 | 37 | 42 |
| Hb | m | 0 | 0.3 | 0.6 |
| Case | Experimental Variables | Response | |||||
|---|---|---|---|---|---|---|---|
| D (m) | Hc (m) | θ (°) | Tb (°C) | Hb (m) | Tm (°C) | ∆T (°C) | |
| 1 | 4 | 2.3 | 25 | 37 | 0.3 | 26.22 | −10.78 |
| 2 | 4 | 2 | 12.5 | 37 | 0.3 | 27.89 | −9.11 |
| 3 | 4 | 1.7 | 12.5 | 32 | 0.3 | 26.04 | −5.96 |
| 4 | 4 | 1.7 | 12.5 | 42 | 0.3 | 30.55 | −11.45 |
| 5 | 4 | 2.3 | 12.5 | 37 | 0 | 27.22 | −9.78 |
| 6 | 2 | 2 | 0 | 37 | 0.3 | 30.36 | −6.64 |
| 7 | 4 | 2 | 12.5 | 32 | 0.6 | 26.22 | −5.78 |
| 8 | 2 | 2 | 25 | 37 | 0.3 | 30.14 | −6.86 |
| 9 | 6 | 2 | 25 | 37 | 0.3 | 25.99 | −11.01 |
| 10 | 4 | 1.7 | 25 | 37 | 0.3 | 28.28 | −8.72 |
| 11 | 4 | 2 | 12.5 | 37 | 0.3 | 27.84 | −9.16 |
| 12 | 4 | 2 | 25 | 42 | 0.3 | 28.61 | −13.39 |
| 13 | 4 | 2 | 25 | 37 | 0 | 27.03 | −9.97 |
| 14 | 2 | 2 | 12.5 | 37 | 0 | 30.41 | −6.59 |
| 15 | 4 | 2 | 0 | 37 | 0.6 | 28.23 | −8.77 |
| 16 | 6 | 2 | 12.5 | 37 | 0 | 25.11 | −11.89 |
| 17 | 4 | 2 | 25 | 37 | 0.6 | 27.92 | −9.08 |
| 18 | 6 | 1.7 | 12.5 | 37 | 0.3 | 25.63 | −11.37 |
| 19 | 4 | 2 | 12.5 | 37 | 0.3 | 28.07 | −8.93 |
| 20 | 2 | 1.7 | 12.5 | 37 | 0.3 | 31.07 | −5.93 |
| 21 | 4 | 2 | 0 | 32 | 0.3 | 25.91 | −6.09 |
| 22 | 6 | 2 | 12.5 | 42 | 0.3 | 27.69 | −14.31 |
| 23 | 4 | 2 | 12.5 | 42 | 0 | 30.56 | −11.44 |
| 24 | 4 | 2 | 12.5 | 42 | 0.6 | 31.07 | −10.93 |
| 25 | 4 | 2 | 0 | 37 | 0 | 27.23 | −9.77 |
| 26 | 4 | 2 | 25 | 32 | 0.3 | 26.2 | −5.8 |
| 27 | 6 | 2 | 12.5 | 37 | 0.6 | 25.55 | −11.45 |
| 28 | 2 | 2 | 12.5 | 37 | 0.6 | 30.96 | −6.04 |
| 29 | 4 | 2 | 0 | 42 | 0.3 | 30.84 | −11.16 |
| 30 | 4 | 2.3 | 0 | 37 | 0.3 | 27.07 | −9.93 |
| 31 | 2 | 2.3 | 12.5 | 37 | 0.3 | 29.62 | −7.38 |
| 32 | 4 | 2 | 12.5 | 37 | 0.3 | 27.46 | −9.54 |
| 33 | 4 | 2.3 | 12.5 | 37 | 0.6 | 27.71 | −9.29 |
| 34 | 4 | 2 | 12.5 | 37 | 0.3 | 27.68 | −9.32 |
| 35 | 6 | 2.3 | 12.5 | 37 | 0.3 | 25.42 | −11.58 |
| 36 | 2 | 2 | 12.5 | 42 | 0.3 | 34.1 | −7.9 |
| 37 | 4 | 2 | 12.5 | 32 | 0 | 25.98 | −6.02 |
| 38 | 4 | 2.3 | 12.5 | 42 | 0.3 | 28.6 | −13.4 |
| 39 | 4 | 1.7 | 12.5 | 37 | 0 | 27.91 | −9.09 |
| 40 | 4 | 2.3 | 12.5 | 32 | 0.3 | 24.85 | −7.15 |
| 41 | 4 | 1.7 | 12.5 | 37 | 0.6 | 28.48 | −8.52 |
| 42 | 6 | 2 | 0 | 37 | 0.3 | 25.98 | −11.02 |
| 43 | 6 | 2 | 12.5 | 32 | 0.3 | 24.48 | −7.52 |
| 44 | 4 | 2 | 12.5 | 37 | 0.3 | 27.43 | −9.57 |
| 45 | 4 | 1.7 | 0 | 37 | 0.3 | 28.21 | −8.79 |
| 46 | 2 | 2 | 12.5 | 32 | 0.3 | 27.12 | −4.88 |
| Case No. | Experimental Variables | Response | |||||
|---|---|---|---|---|---|---|---|
| D (m) | Hc (m) | θ (°) | Tb (°C) | Hb (m) | Tm (°C) | ΔT (°C) | |
| 1 | 2.32 | 1.72 | 5.3 | 41.8 | 0.16 | 40.26 | −1.54 |
| 2 | 3.56 | 1.76 | 8.7 | 39.6 | 0.34 | 37.41 | −2.19 |
| 3 | 3.72 | 1.87 | 10.2 | 38.9 | 0.19 | 36.44 | −2.46 |
| 4 | 4.22 | 1.81 | 12.1 | 38.2 | 0.41 | 35.64 | −2.56 |
| 5 | 4.36 | 1.92 | 16.5 | 35.1 | 0.06 | 33.07 | −2.03 |
| 6 | 5.18 | 1.97 | 15.2 | 36.7 | 0.46 | 33.61 | −3.09 |
| 7 | 5.32 | 1.79 | 13.6 | 41.6 | 0.1 | 37 | −4.6 |
| 8 | 5.61 | 2.16 | 18.6 | 35.4 | 0.51 | 32.25 | −3.15 |
| 9 | 5.86 | 2.24 | 24.6 | 33.1 | 0.56 | 30.45 | −2.65 |
| Source | SS | df | MS | F-Value | p-Value |
|---|---|---|---|---|---|
| Model | 184.14 | 20 | 9.21 | 49.65 | <0.0001 |
| Model | 308.29 | 9 | 34.25 | 1321.89 | <0.0001 |
| A-horizontal distance | 33.58 | 1 | 33.58 | 1295.93 | <0.0001 |
| B-camera height | 1.16 | 1 | 1.16 | 44.80 | <0.0001 |
| C-angle | 0.5852 | 1 | 0.5852 | 22.58 | <0.0001 |
| D-temperature | 269.45 | 1 | 269.45 | 10,398.19 | <0.0001 |
| E-black body height | 0.2093 | 1 | 0.2093 | 8.08 | 0.0073 |
| AD | 1.56 | 1 | 1.56 | 60.30 | <0.0001 |
| A² | 0.3527 | 1 | 0.3527 | 13.61 | 0.0007 |
| C² | 0.5104 | 1 | 0.5104 | 19.70 | <0.0001 |
| D² | 0.6065 | 1 | 0.6065 | 23.41 | <0.0001 |
| Residual | 0.9329 | 36 | 0.0259 | ||
| Lack of Fit | 0.8309 | 31 | 0.0268 | 1.31 | 0.4149 |
| Pure Error | 0.1019 | 5 | 0.0204 | ||
| Cor Total | 309.23 | 45 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Hu, F.; Yang, R.; Wang, K. An Infrared Temperature Correction Method for the Skin Temperature of Pigs in Infrared Images. Agriculture 2023, 13, 520. https://doi.org/10.3390/agriculture13030520
Wang X, Hu F, Yang R, Wang K. An Infrared Temperature Correction Method for the Skin Temperature of Pigs in Infrared Images. Agriculture. 2023; 13(3):520. https://doi.org/10.3390/agriculture13030520
Chicago/Turabian StyleWang, Xiaoshuai, Feiyue Hu, Ruimin Yang, and Kaiying Wang. 2023. "An Infrared Temperature Correction Method for the Skin Temperature of Pigs in Infrared Images" Agriculture 13, no. 3: 520. https://doi.org/10.3390/agriculture13030520