
Analysis of Cyperus esculentus–Soil Dynamic Behavior during Rotary Tillage Based on Discrete Element Method
 ,
,
Abstract
:1. Introduction
2. Materials and Methods
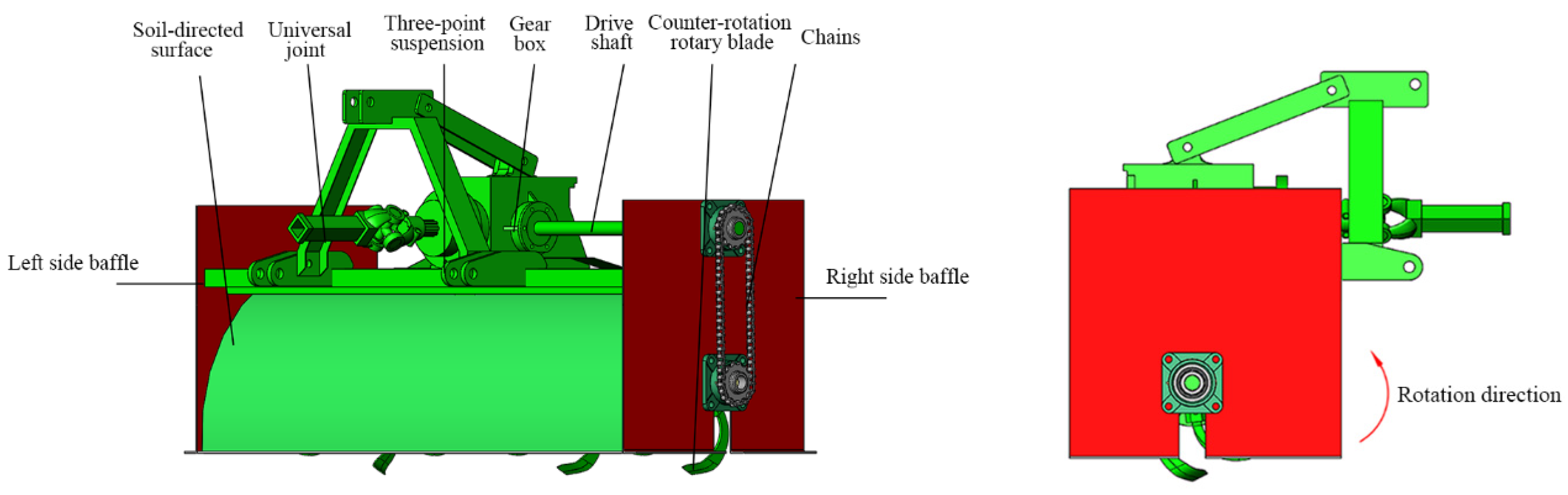
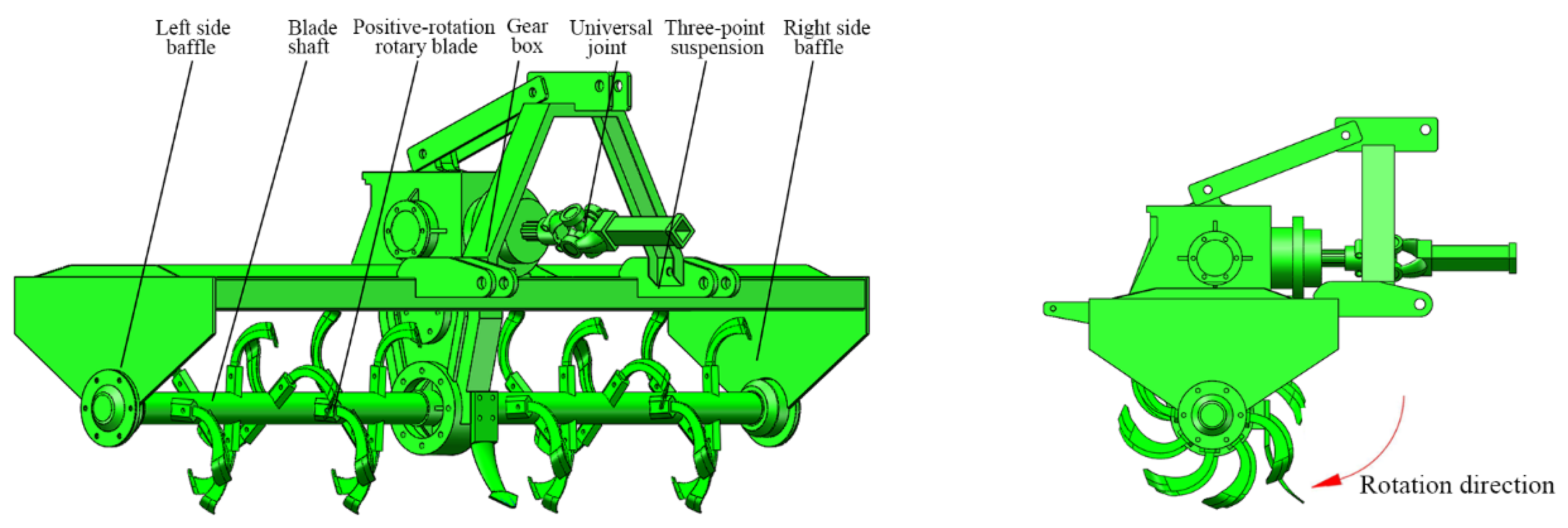
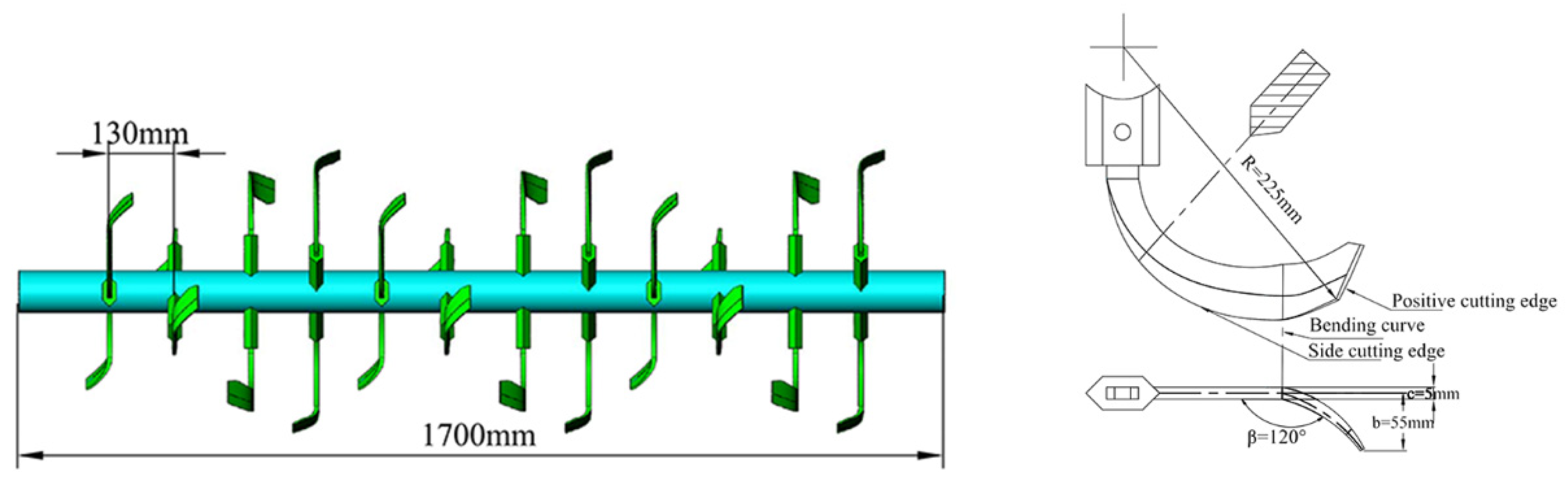
2.1. Machine Configuration
2.2. Principle of Positive and Counter-Rotating Harvesting of Cyperus esculentus
2.3. EDEM Modeling
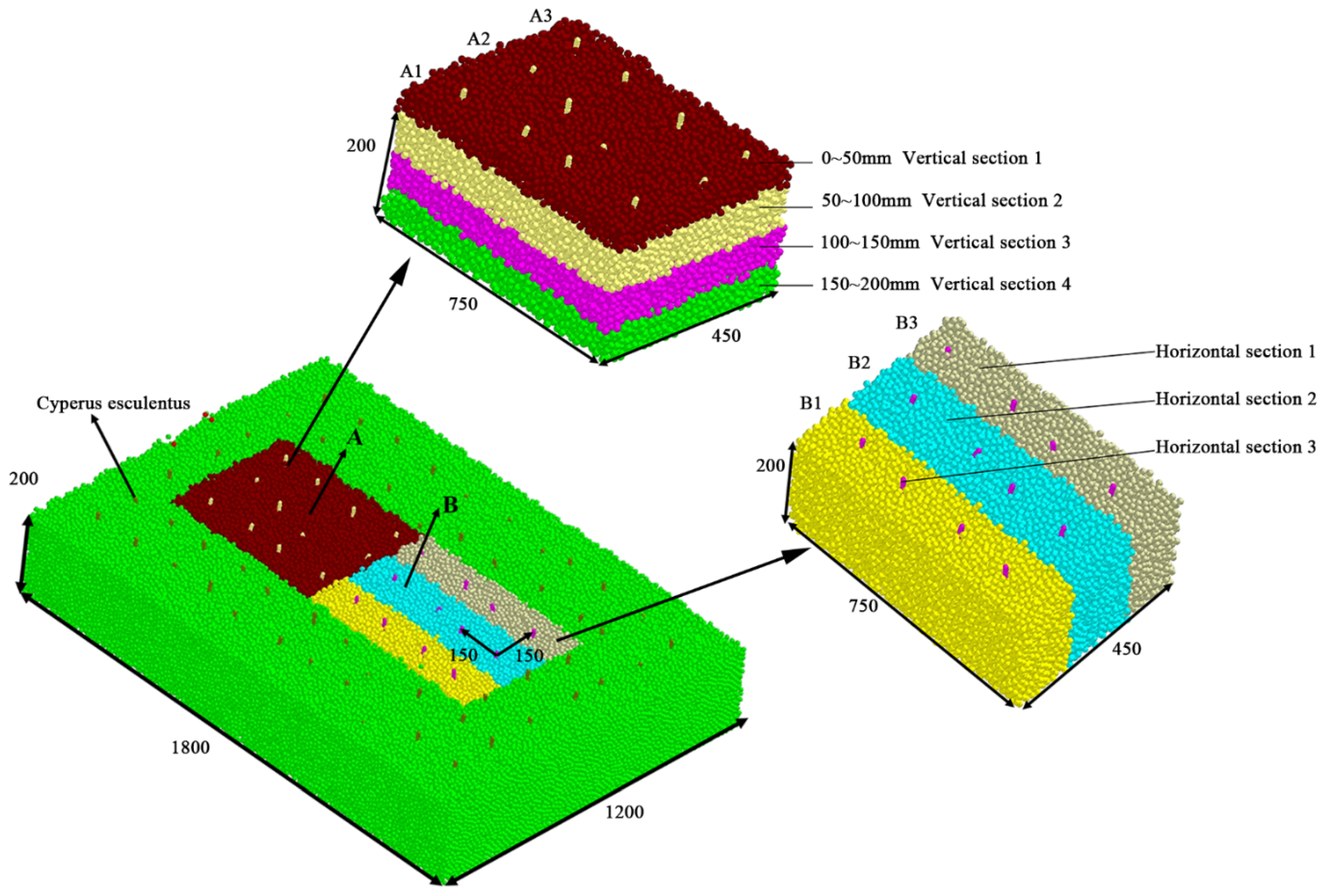
2.3.1. Soil Physical Properties and Discrete Element Modeling
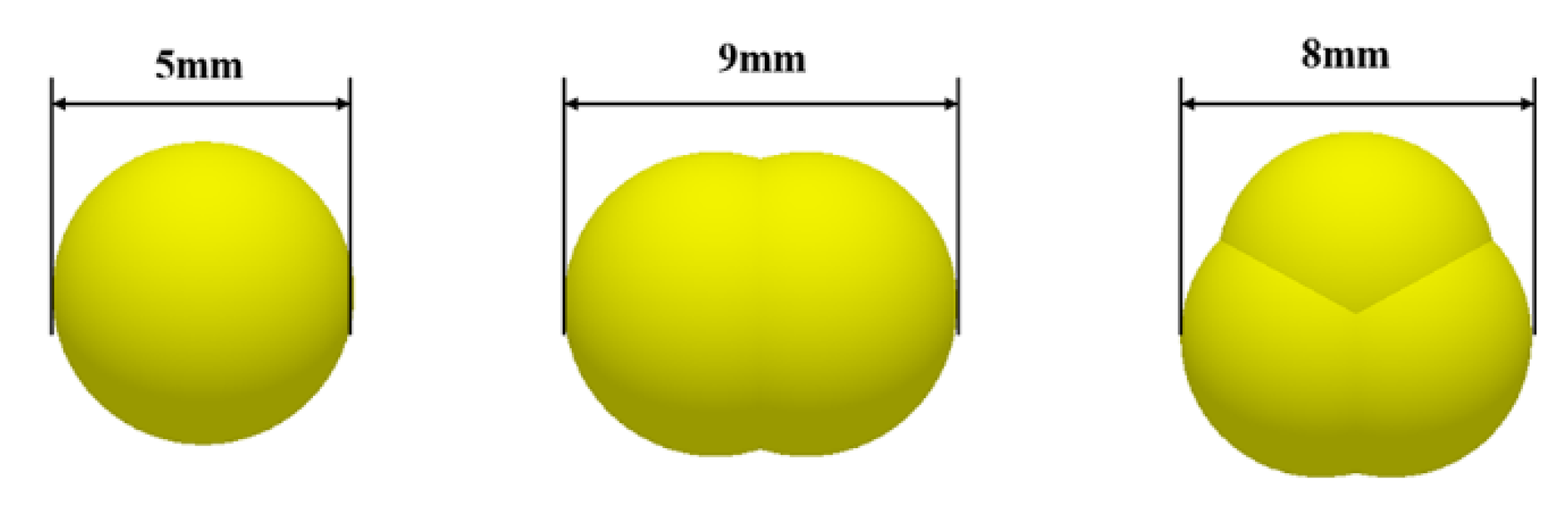
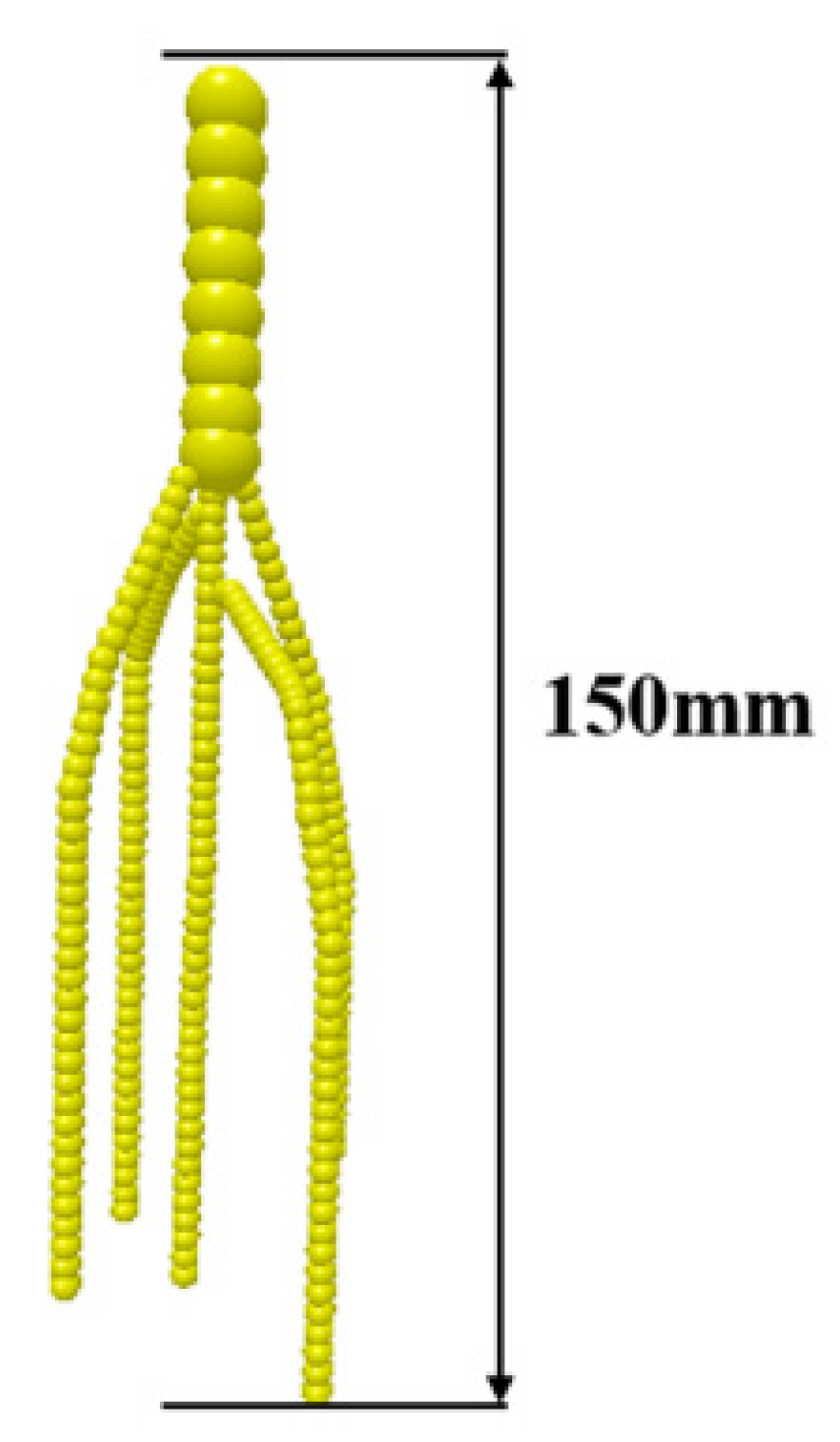
2.3.2. Cyperus esculentus Discrete Element Modeling
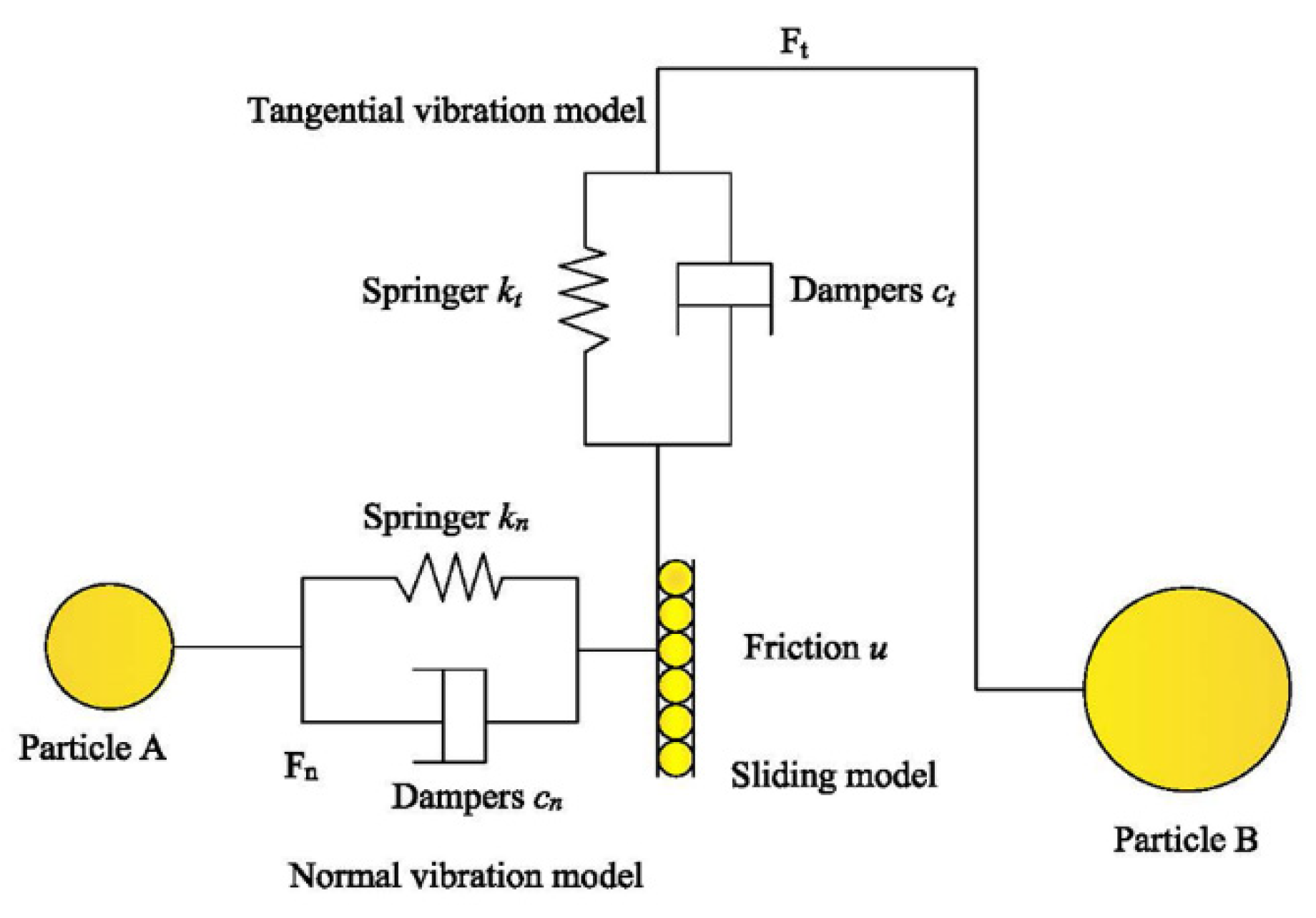
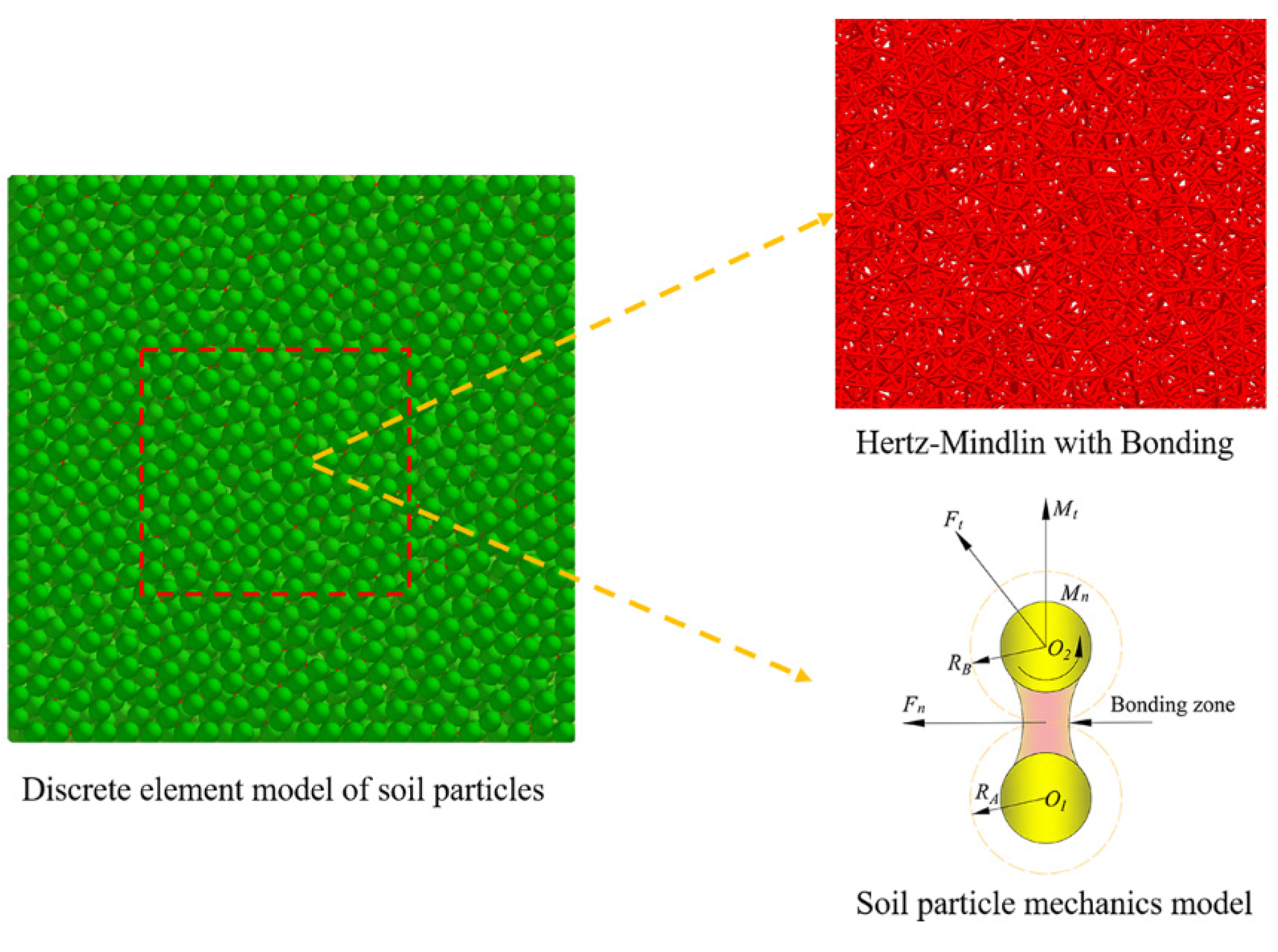
2.3.3. Discrete Element Model
2.3.4. Discrete Element Simulation Parameters
2.3.5. Discrete Element Model for Cyperus esculentus Agglomerates
2.4. Cyperus esculentus Field Harvesting Test
Test Method
3. Results and Analysis
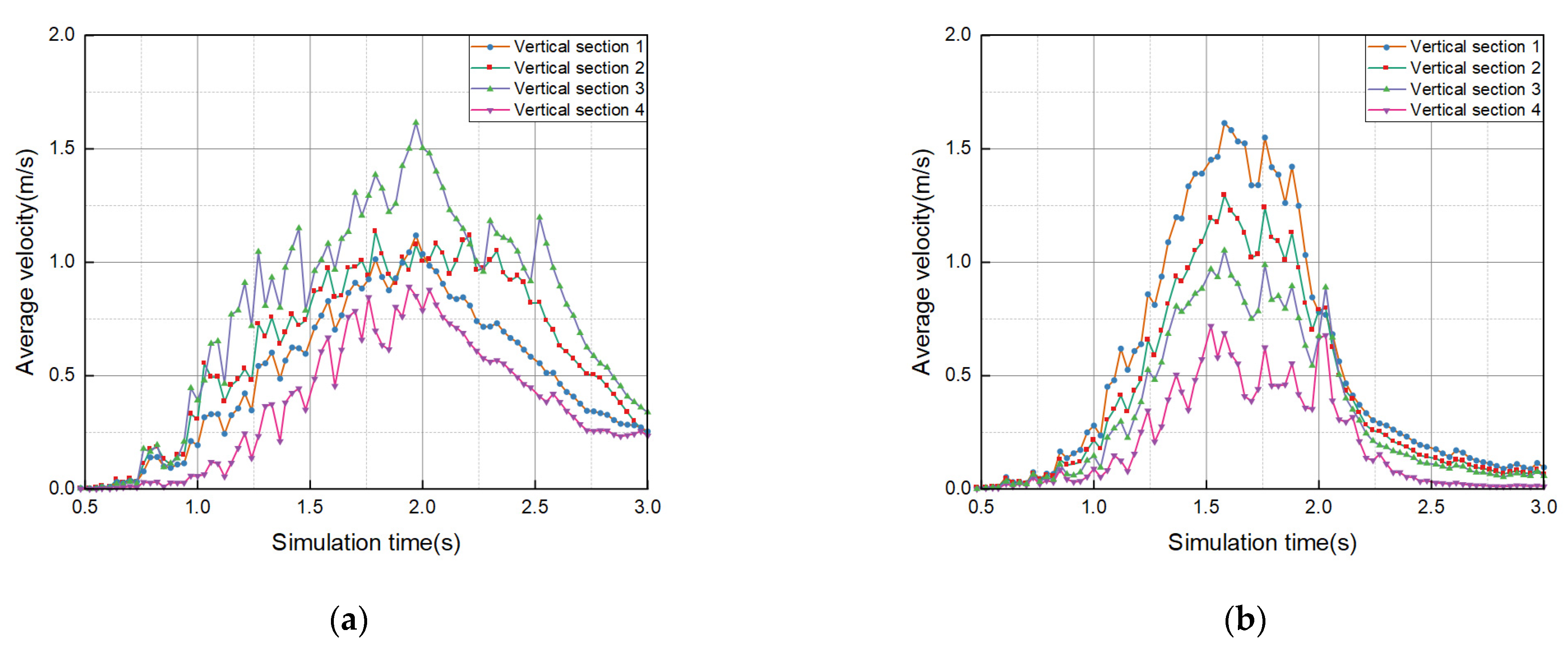
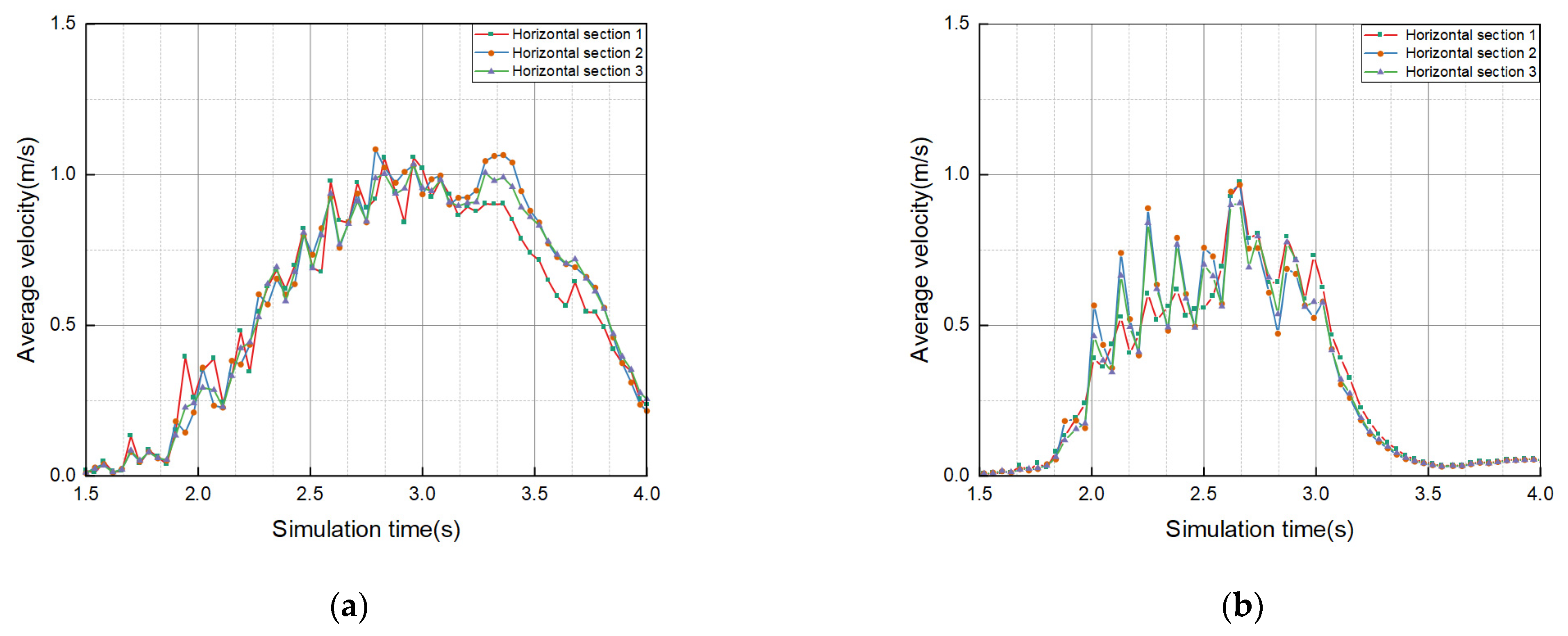
3.1. The Analysis of Cyperus esculentus–Soil Movement Behavior in Discrete Element Method
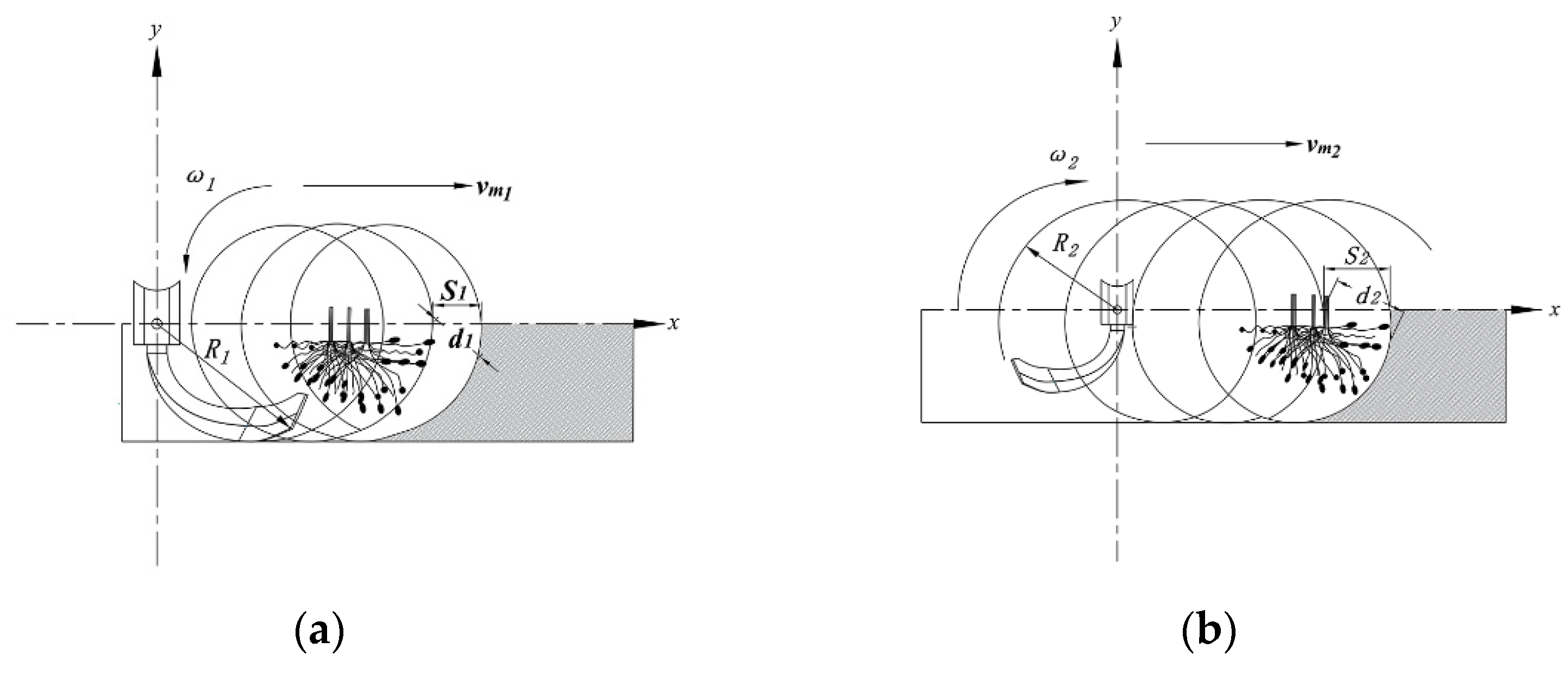
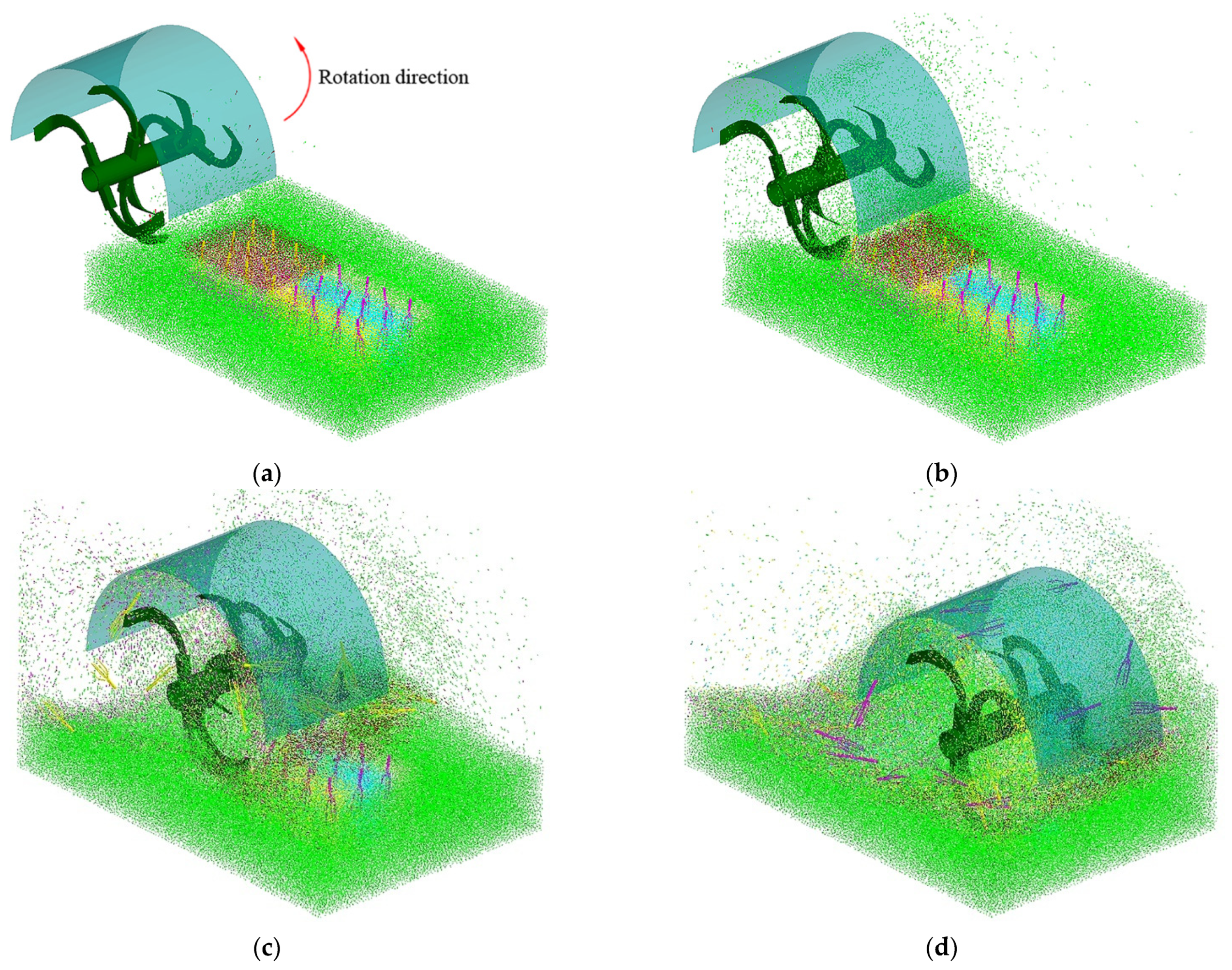
3.1.1. The Analysis of Cyperus esculentus–Soil Movement Behavior in Counter-Rotation Operation
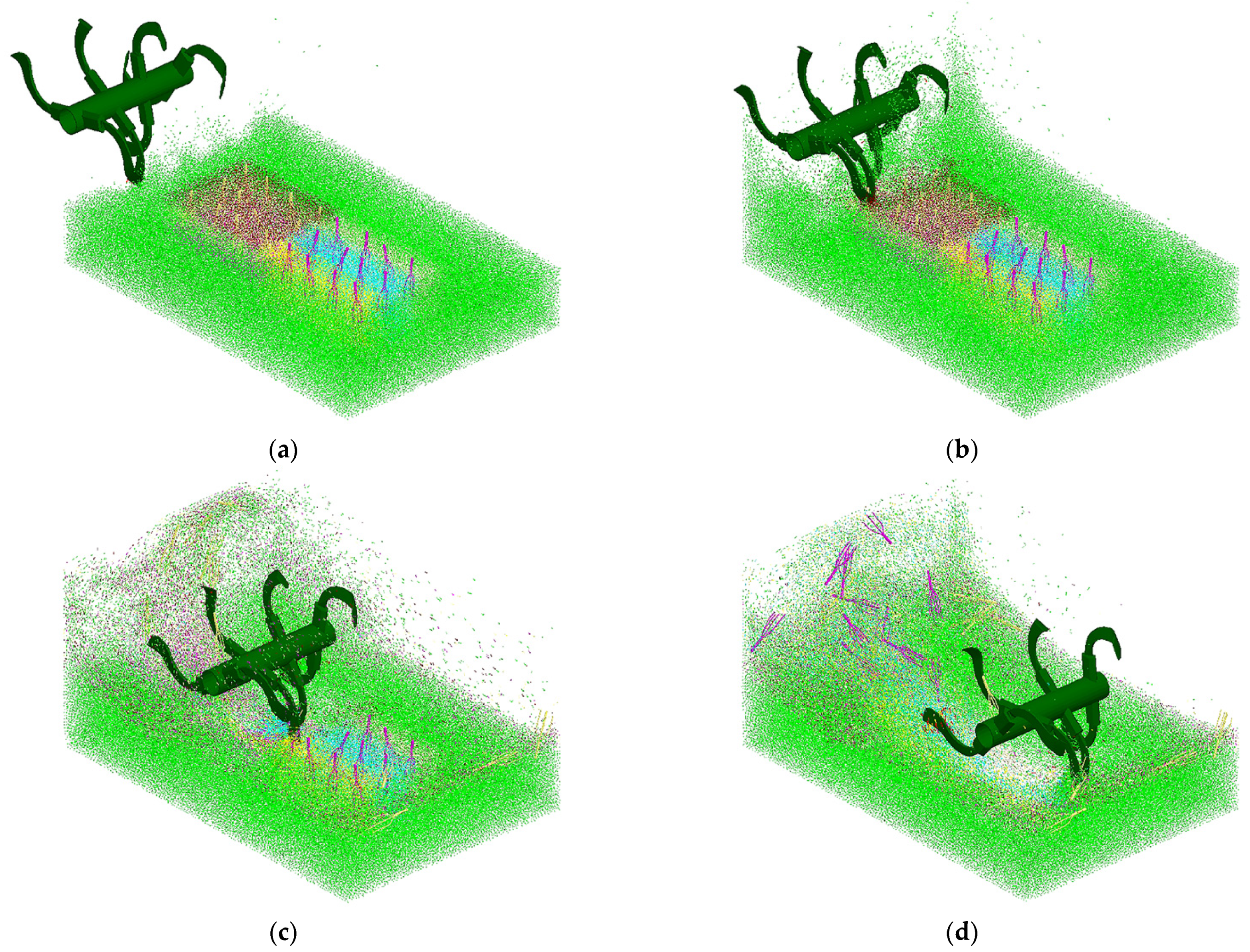
3.1.2. The Analysis of Cyperus esculentus–Soil Movement Behavior in Positive Operation
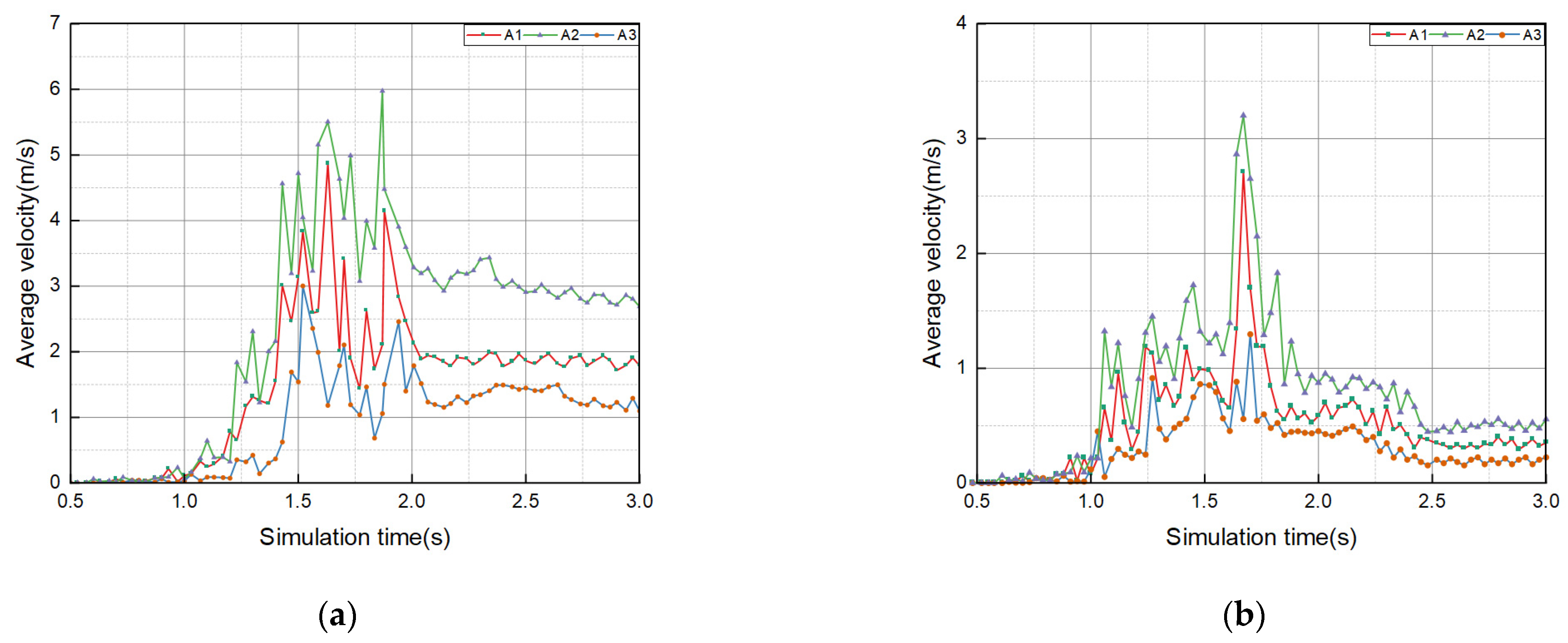
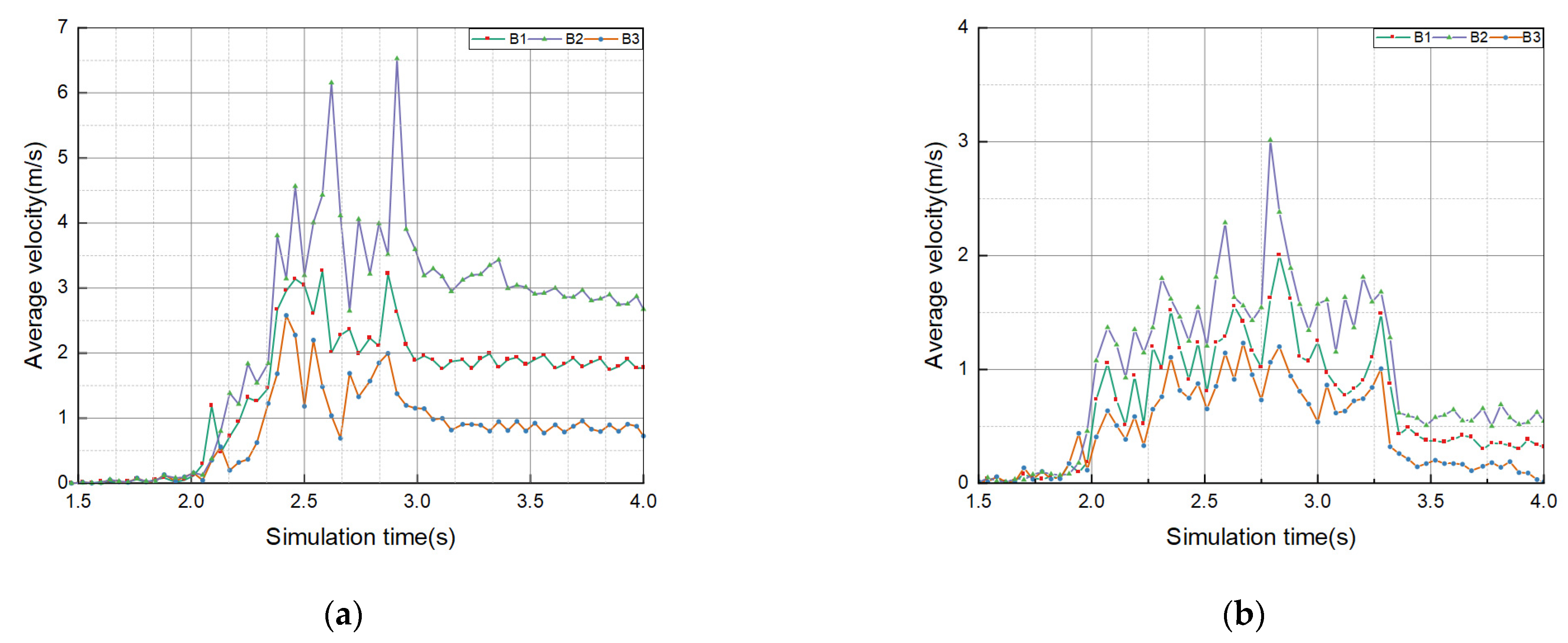
3.2. The Analysis of Cyperus esculentus–Soil Disturbance under Positive and Counter-Rotation Operations
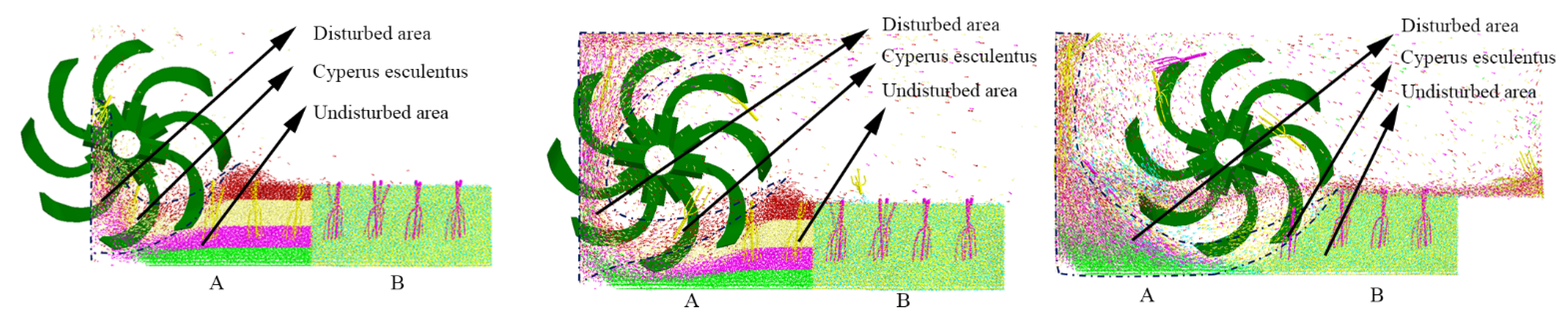
3.2.1. The Analysis of Soil Disturbance under Positive and Counter-Rotation Operations
3.2.2. The Analysis of Soil Disturbance under Positive and Counter-Rotation Operations
3.3. The Effect of Different Operating Parameters on the Intensity of Cyperus esculentus–Soil Disturbance
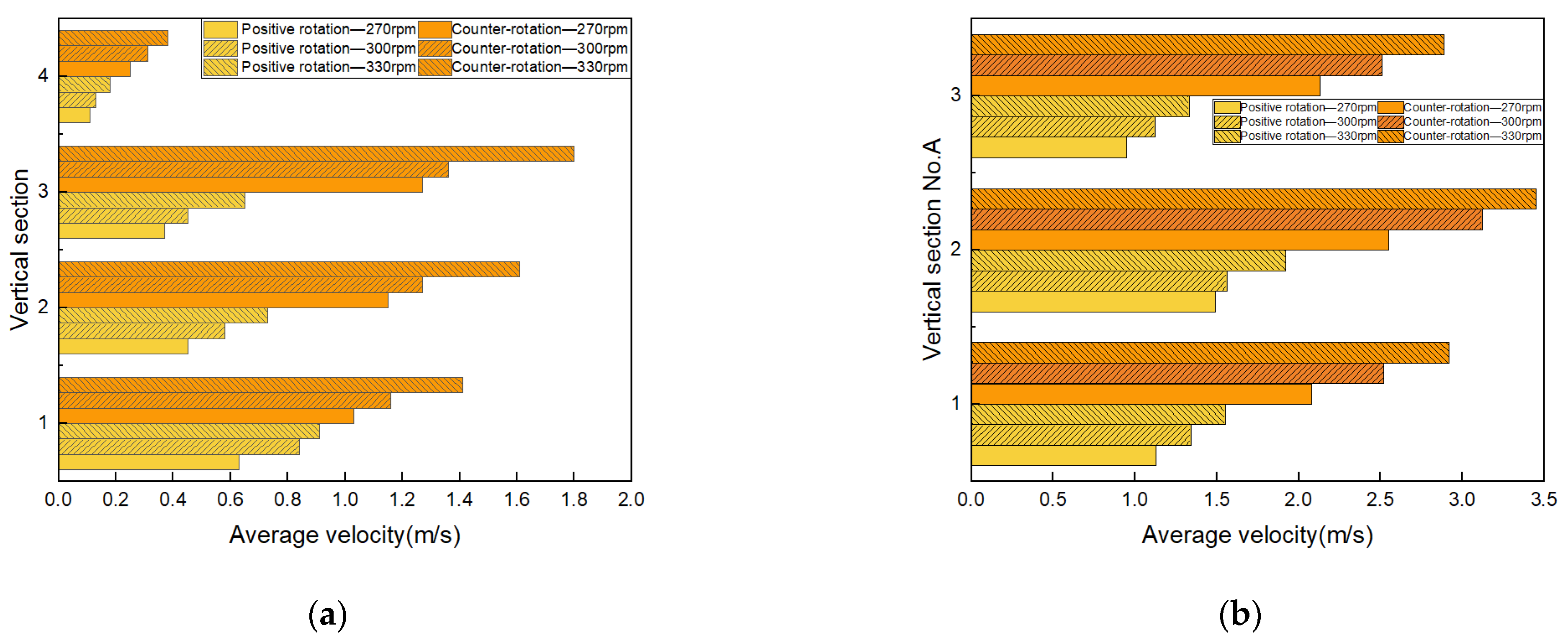
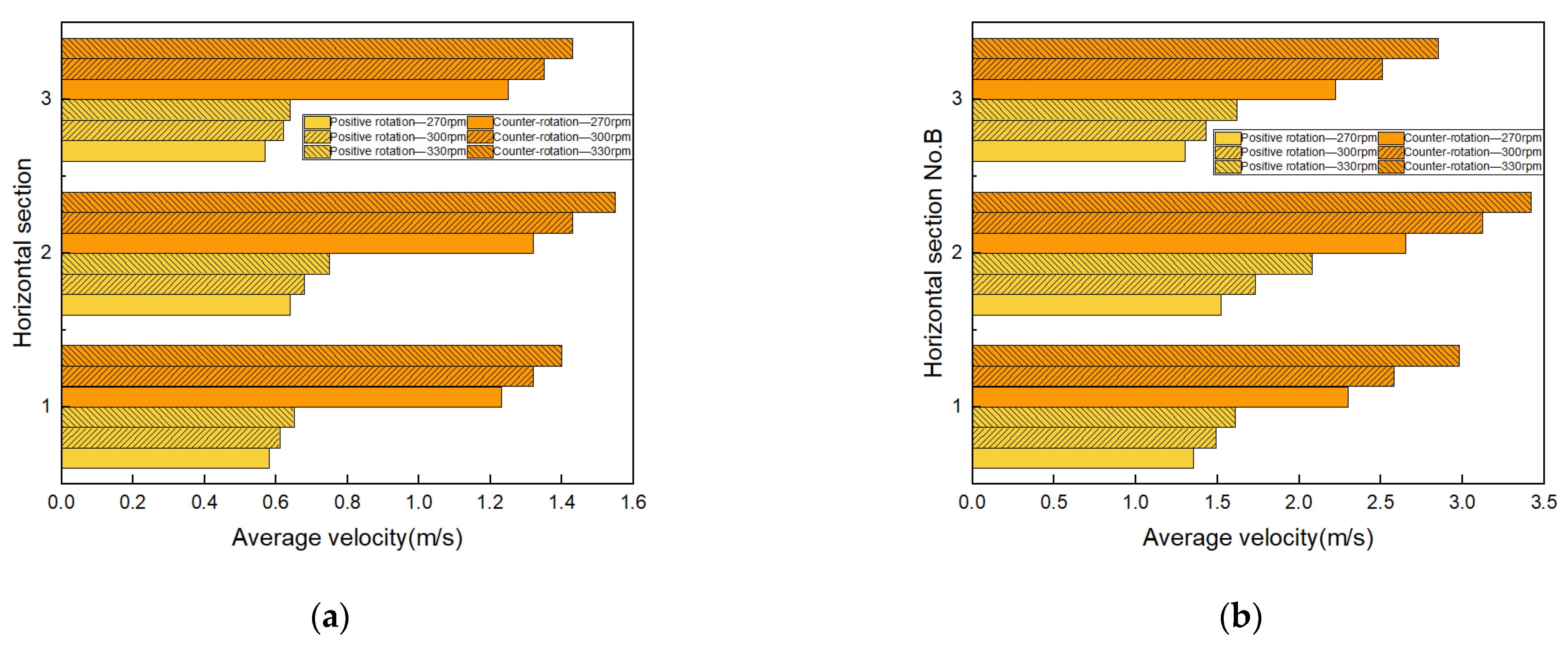
3.3.1. The Effect of Rotation Speed of Rotary Tillage Blade on the Intensity of Cyperus esculentus–Soil Disturbance
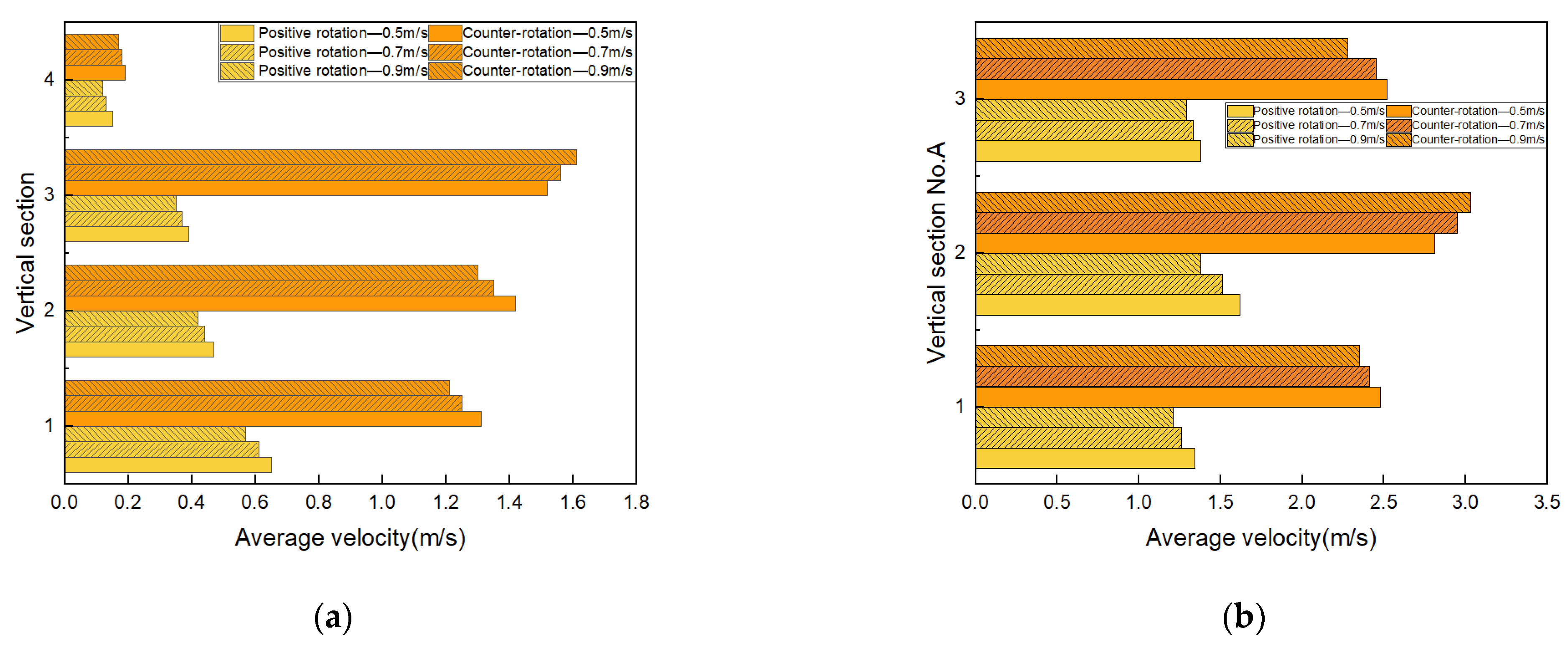
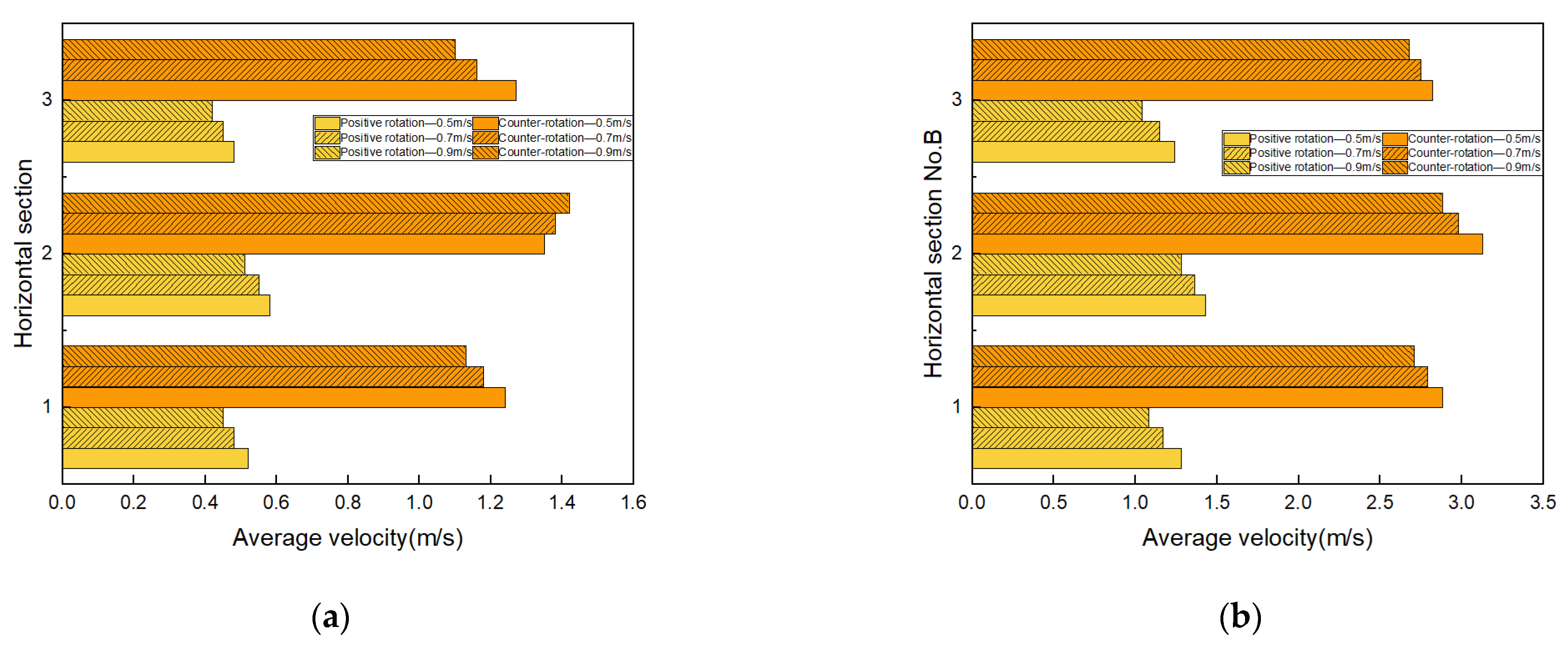
3.3.2. The Effect of Forward Speed on the Intensity of Cyperus esculentus–Soil Disturbance
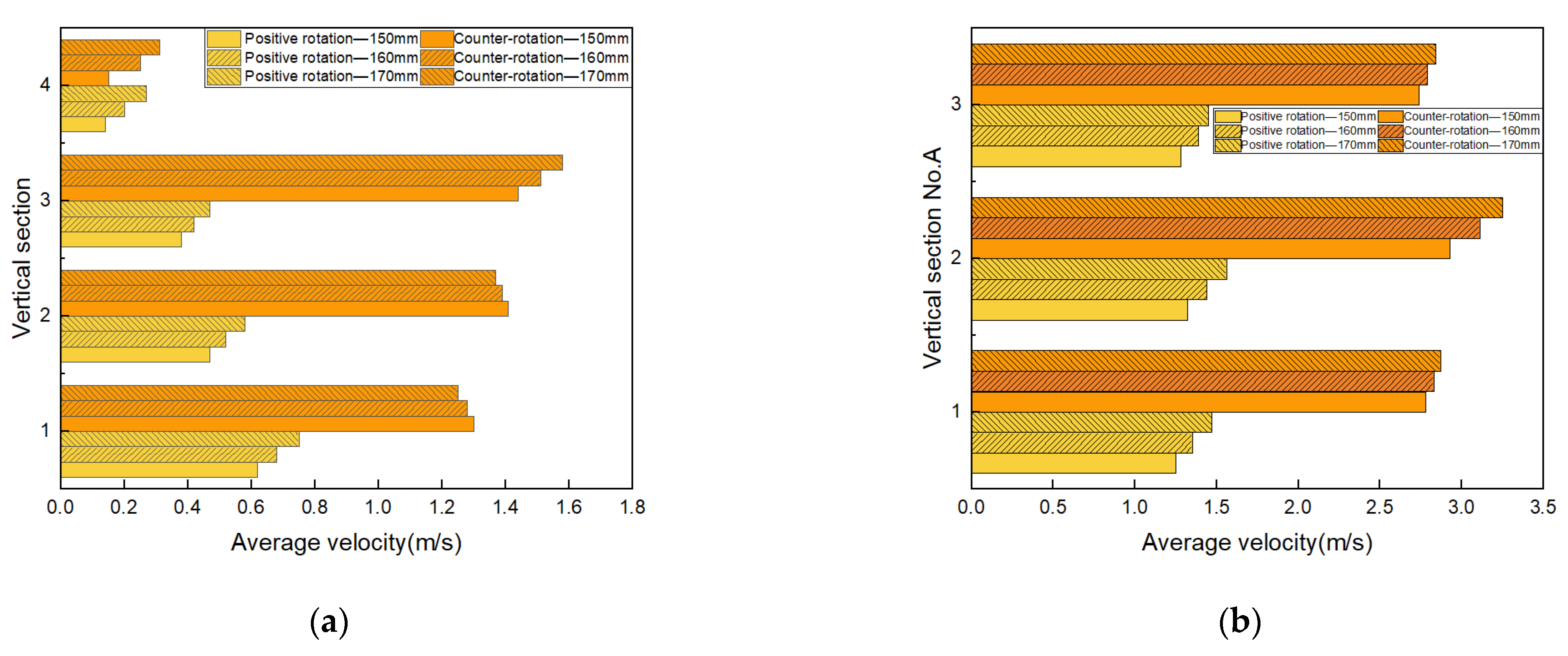
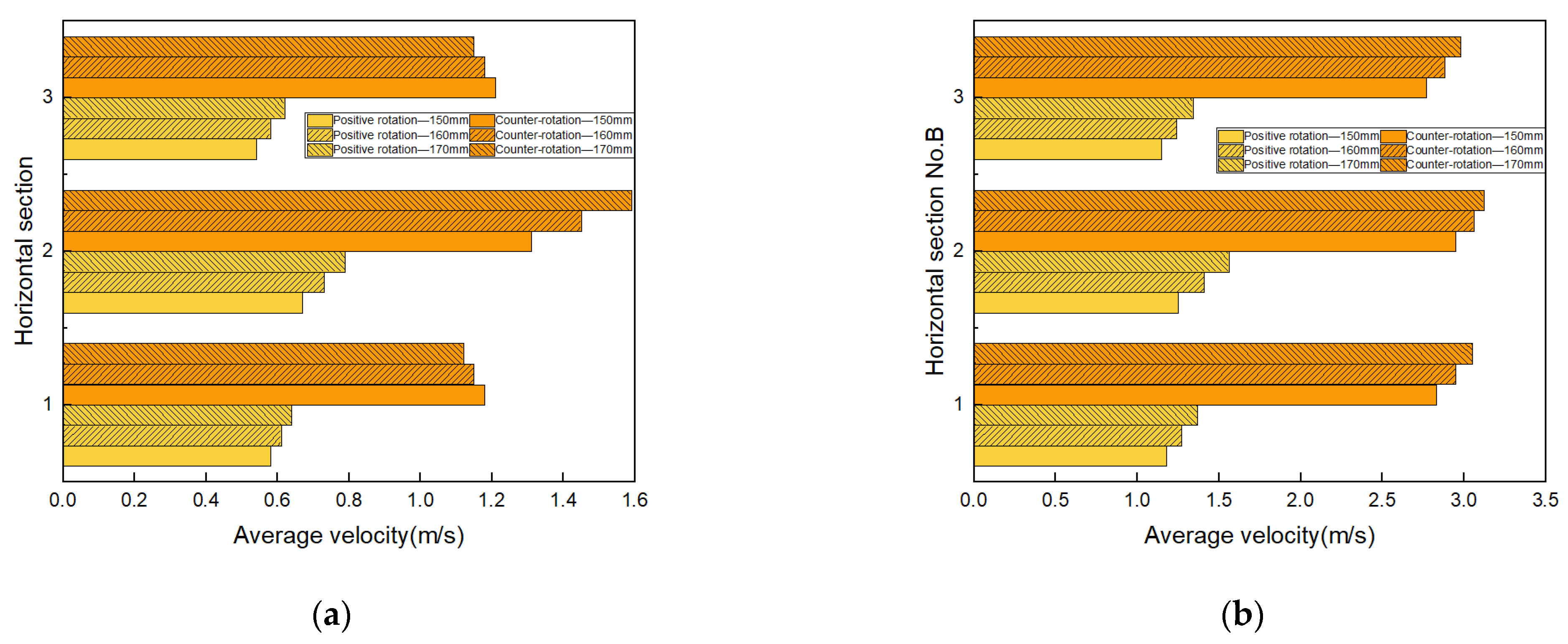
3.3.3. The Effect of Working Depth on the Intensity of Cyperus esculentus–Soil Disturbance
3.4. The Results of the Field Test
4. Discussion
5. Conclusions
- (1)
- To study the dynamic relationship between Cyperus esculentus–soil and rotary tillage blade under positive and counter-rotation operation, a discrete element model of Cyperus esculentus–soil–rotary tillage blade was established in this paper, and the movement behaviors of soil and Cyperus esculentus were analyzed. The experiments showed that in the AB area, the disturbance intensity of soil and Cyperus esculentus increased by 166.67% and 297.78% for counter-rotation operation compared with the positive rotation operation, and the effective disturbance time for Cyperus esculentus and soil increased by 133.33% compared with the positive rotation operation, indicating that counter-rotation operation increased the harvesting efficiency of Cyperus esculentus to some extent.
- (2)
- This paper systematically analyzed the disturbance law of rotary tillage blade rotation speed, forward speed, and working depth on the root system and soil of Cyperus esculentus. The test showed that the working depth was the most significant for soil disturbance intensity, with the working depth increasing from 150 mm to 170 mm, the soil disturbance intensity increased by 17.91% and 21.37% for positive and counter-rotation rotation, respectively. The rotation speed of the rotary tillage blade was the most significant for the disturbance intensity of the root system of the Cyperus esculentus. With the increase of the rotary tillage blade rotation speed from 270 rpm to 330 rpm, the disturbance intensity of the root system of the Cyperus esculentus increased by 28.85% and 35.29% for the positive and counter-rotation operations, respectively.
- (3)
- This paper conducted a comparative field test of Cyperus esculentus harvesting. It systematically analyzed the field test results using soil fragmentation rate and Cyperus esculentus damage rate as the test indexes. The results showed that compared with the positive rotation operation, the Cyperus esculentus counter-rotation soil fragmentation rate increased by 4.09%, the Cyperus esculentus damage rate decreased by 10.69%, and the buried fruit rate decreased by 7.38%.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, X.D.; Li, Z.Y. Tiger nut industry in China: Current status of development, potential and adaptive suggestions. Chin. J. Oil Crop Sci. 2022, 44, 712–717. [Google Scholar]
- Zhu, H.; He, X.; Shang, S.; Zhao, Z.; Wang, H.; Tan, Y.; Li, C.; Wang, D. Evaluation of Soil-Cutting and Plant-Crushing Performance of Rotary Blades with Double-Eccentric Circular-Edge Curve for Harvesting Cyperus esculentus. Agriculture 2022, 12, 862. [Google Scholar] [CrossRef]
- Hang, C.; Gao, X.; Yuan, M.; Huang, Y.; Zhu, R. Discrete element simulations and experiments of soil disturbance as affected by the tine spacing of subsoiler. Biosyst. Eng. 2018, 168, 73–82. [Google Scholar] [CrossRef]
- Zhou, H.; Zhang, C.; Zhang, W.; Yang, Q.; Li, D.; Liu, Z.; Xia, J. Evaluation of straw spatial distribution after straw incorporation into soil for different tillage tools. Soil Tillage Res. 2020, 196, 104440. [Google Scholar] [CrossRef]
- Han, L.; Yuan, W.; Yu, J.; Jin, J.; Xie, D.; Xi, X.; Zhang, Y.; Zhang, R. Simulation and Experiment of Spiral Soil Separation Mechanism of Compound Planter Based on Discrete Element Method (DEM). Agriculture 2022, 12, 511. [Google Scholar] [CrossRef]
- He, X.N.; Zhang, X.J.; Zhao, Z.; Shang, S.Q.; Wang, D.W.; Yang, S. Design and Optimisation Tests of Reverse Spin-throwing Cyperus esculentus Starting Device. Trans. Chin. Soc. Agric. Mach. 2022, 53, 34–43. [Google Scholar]
- Ibrahmi, A.; Bentaher, H.; Maalej, A. Soil-blade orientation effect on tillage forces determined by 3D finite element models. Span. J. Agric. Res. 2014, 12, 941–951. [Google Scholar] [CrossRef]
- Zhai, L.; Xu, P.; Zhang, Z.; Li, S.; Xie, R.; Zhai, L.; Wei, B. Effects of Deep Vertical Rotary Tillage on Dry Matter Accumulation and Grain Yield of Summer Maize in the Huang-Huai-Hai Plain of China. Soil Tillage Res. 2017, 170, 167–174. [Google Scholar] [CrossRef]
- Zeng, Z.; Chen, Y.; Zhang, X. Modelling the interaction of a deep tillage tool with heterogeneous soil. Comput. Electron. Agric. 2017, 143, 130–138. [Google Scholar] [CrossRef]
- Tamás, K.; Jóri, I.J.; Mouazen, A.M. Modelling soil–sweep interaction with discrete element method. J. Soil. Res. 2013, 134, 223–231. [Google Scholar] [CrossRef]
- Fang, H.M.; Ji, C.Y.; Guo, J.; Zhang, Q.Y. Force analysis of rotary tillage knives based on the discrete element method. Trans. Chin. Soc. Agric. Eng. 2016, 32, 54–59. [Google Scholar]
- He, X.N.; Zhang, X.J.; Zhao, Z.; Shang, S.Q.; Wang, D.W.; Yuan, X.W. Design and testing of a discrete element method-based oil soya bean resistance reduction excavation device. Trans. Chin. Soc. Agric. Mach. 2021, 52, 124–133. [Google Scholar]
- Shmulevich, I. State of the art modeling of soil–tillage interaction using discrete element method. Soil Tillage Res. 2010, 111, 41–53. [Google Scholar] [CrossRef]
- Bravo, E.L.; Tijskens, E.; Suárez, M.H.; Gonzalez Cueto, O.; Ramon, H. Prediction model for non-inversion soil tillage implemented on discrete element method. Comput. Electron. Agric. 2014, 106, 120–127. [Google Scholar] [CrossRef]
- Pirchio, M.; Fontanelli, M.; Labanca, F.; Sportelli, M.; Frasconi, C.; Martelloni, L.; Raffaelli, M.; Peruzzi, A.; Gaetani, M.; Magni, S.; et al. Energetic Aspects of Turfgrass Mowing: Comparison of Different Rotary Mowing Systems. Agriculture 2019, 9, 178. [Google Scholar] [CrossRef]
- Matin, M.A.; Fielke, J.M.; Desbiolles, J.M.A. Torque and energy characteristics for strip-tillage cultivation when cutting furrows using three designs of rotary blade. Biosyst. Eng. 2015, 129, 329–340. [Google Scholar] [CrossRef]
- Jian, J.M.; Chen, H.K.; Hou, S.L.; Zhou, M.; Wang, L.; Tian, J.Y.; Bi, T. A Low Loss Spiral Digging and Vertical Sieve Type Screening Cyperus esculentus Harvester. China Patent CN216313995U, 13 July 2021. [Google Scholar]
- Song, W.; Jiang, X.H.; Li, L.K.; Ren, L.L.; Tong, J. Increasing the width of disturbance of plough pan with bionic inspired subsoilers. Soil Tillage Res. 2022, 220, 105356. [Google Scholar] [CrossRef]
- Scanlan, C.A.; Davies, S.L. Soil mixing and redistribution by strategic deep tillage in a sandy soil. Soil Tillage Res. 2019, 185, 139–145. [Google Scholar] [CrossRef]
- Lenaerts, B.; Aertsen, T.; Tijskens, E.; De Ketelaere, B.; Ramon, H.; De Baerdemaeker, J.; Saeys, W. Simulation of grain–straw separation by Discrete Element Modeling with bendable straw particles. Comput. Electron. Agric. 2014, 101, 24–33. [Google Scholar] [CrossRef]
- Songül Gürsoy, S.; Chen, Y.; Li, B. Measurement and modelling of soil displacement from sweeps with different cutting widths. Biosyst. Eng. 2017, 161, 1–13. [Google Scholar] [CrossRef]
- Saunders, C.; Ucgul, M.; Godwin, R.J. Discrete element method (DEM) simulation to improve performance of a mouldboard skimmer. Soil Tillage Res. 2021, 205, 104764. [Google Scholar] [CrossRef]
- Du, J.; Heng, Y.; Zheng, K.; Luo, C.; Zhu, Y.; Zhang, J.; Xia, J. Investigation of the burial and mixing performance of a rotary tiller using discrete element method. Soil Tillage Res. 2022, 220, 105349. [Google Scholar] [CrossRef]
- Fang, H.M.; Ji, C.Y.; Chandio, F.A.; Guo, J.; Zhang, Q.Y.; Arslan, C. Analysis of soil movement behaviour during rototilling based on the discrete element method. Trans. Chin. Soc. Agric. Mach. 2016, 47, 22–28. [Google Scholar]
- Tong, J.; Jiang, X.-H.; Wang, Y.-M.; Ma, Y.-H.; Li, J.-W.; Sun, J.-Y. Tillage force and disturbance characteristics of different geometric-shaped subsoilers via DEM. Adv. Manuf. 2020, 8, 392–404. [Google Scholar] [CrossRef]
- Matin, A.; Fielke, J.M.; Desbiolles, J.M.A. Furrow parameters in rotary strip-tillage: Effect of blade geometry and rotary speed. Biosyst. Eng. 2014, 118, 7–15. [Google Scholar] [CrossRef]
- Matin, M.A.; Desbiolles, J.M.A.; Fielke, J.M. Strip-tillage using rotating straight blades: Effect of cutting edge geometry on furrow parameters. Soil Tillage Res. 2016, 155, 271–279. [Google Scholar] [CrossRef]
- Zhao, H.; Li, H.; Ma, S.; He, J.; Wang, Q.; Lu, C.; Zheng, Z.; Zhang, C. The effect of various edge-curve types of plain-straight blades for strip tillage seeding on torque and soil disturbance using DEM. Soil Tillage Res. 2020, 202, 104674. [Google Scholar] [CrossRef]
- Zheng, K.; He, J.; Li, H.W.; Zhao, H.B.; Hu, H.N.; Liu, W.Z. Design and testing of a counter-rotating deep pine combine tiller. Trans. Chin. Soc. Agric. Mach. 2017, 48, 61–71. [Google Scholar]
- Mak, J.; Chen, Y.; Sadek, M. Determining parameters of a discrete element model for soil–tool interaction. Soil Tillage Res. 2012, 118, 117–122. [Google Scholar] [CrossRef]
- Ucgul, M.; Saunders, C.; Fielke, J.M. Discrete element modelling of tillage forces and soil movement of a one-third scale mouldboard plough. Biosyst. Eng. 2017, 155, 44–54. [Google Scholar] [CrossRef]
- Xu, G.M.; Xie, Y.X.; Matin, M.A.; He, R.Y.; Ding, Q.S. Effect of Straw Length, Stubble Height and Rotary Speed on Residue Incorporation by Rotary Tillage in Intensive Rice–Wheat Rotation System. Agriculture 2022, 12, 222. [Google Scholar] [CrossRef]
- Ucgul, M.; Saunders, C. Simulation of tillage forces and furrow profile during soil-mouldboard plough interaction using discrete element modelling. Biosyst. Eng. 2020, 190, 58–70. [Google Scholar] [CrossRef]
- Ucgul, M.; Saunders, C.; Li, P.; Lee, S.-H.; Desbiolles, J.M. Analyzing the mixing performance of a rotary spader using digital image processing and discrete element modelling (DEM). Comput. Electron. Agric. 2018, 151, 1–10. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, J.; Yuan, W.; Zhang, R.; Xi, X. Multiple Leveling for Paddy Field Preparation with Double Axis Rotary Tillage Accelerates Rice Growth and Economic Benefits. Agriculture 2021, 11, 1223. [Google Scholar] [CrossRef]
- Ucgul, M.; Fielke, J.M.; Saunders, C. Three-dimensional discrete element modelling (DEM) of tillage: Accounting for soil cohesion and adhesion. Biosyst. Eng. 2015, 129, 298–306. [Google Scholar] [CrossRef]
- Fan, Y. Research on Potato Digging Mechanism and Bionic Shovel Design Based on Discrete Element Method. Ph.D. Thesis, Shenyang Agricultural University, Shenyang, China, 2020. [Google Scholar]
- Asaf, Z.; Rubinstein, D.; Shmulevich, I. Determination of discrete element model parameters required for soil tillage. Soil Tillage Res. 2007, 92, 227–242. [Google Scholar] [CrossRef]
- Makange, N.R.; Ji, C.; Torotwa, I. Prediction of cutting forces and soil behavior with discrete element simulation. Comput. Electron. Agric. 2020, 179, 105848. [Google Scholar] [CrossRef]
- Tsuji, T.; Nakagawa, Y.; Matsumoto, N.; Kadono, Y.; Takayama, T.; Tanaka, T. 3-D DEM simulation of cohesive soil-pushing behavior by bulldozer blade. J. Terramech. 2012, 49, 37–47. [Google Scholar] [CrossRef]
- Shaikh, S.A.; Li, Y.; Ma, Z.; Chandio, F.A.; Tunio, M.H.; Liang, Z.; Solangi, K.A. Discrete element method (DEM) simulation of single grouser shoe-soil interaction at varied moisture contents. Comput. Electron. Agric. 2021, 191, 106538. [Google Scholar] [CrossRef]
- Potyondy, D.O.; Cundall, P.A. A bonded-particle model for rock. Int. J. Rock Mech. Min. Sci. 2004, 41, 1329–1364. [Google Scholar] [CrossRef]
- Rahman, S.; Chen, Y. Laboratory investigation of cutting forces and soil disturbance resulting from different manure incorporation tools in a loamy sand soil. Soil Tillage. Res. 2001, 58, 19–29. [Google Scholar] [CrossRef]
- Qi, J.; An, S.; Kan, Z.; Meng, H.; Li, Y.; Zhao, X. Discrete element-based calibration of simulation parameters of Cyperus esculentus L. (tiger nut) planted in sandy soil. J. Food Process. Preserv. 2021, 45, 15631. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Depth of Soil | |||||||
|---|---|---|---|---|---|---|---|---|
| 0~50 mm | 50~100 mm | 100~150 mm | 150~200 mm | |||||
| Field | EDEM | Field | EDEM | Field | EDEM | Field | EDEM | |
| Density (kg/m3) | 1596 | 1596 | 1654 | 1654 | 1736 | 1736 | 1787 | 1787 |
| Moisture content (%) | 6.5 | / | 7.8 | / | 8.5 | / | 10.5 | / |
| Parameters | Depth of Soil | |||
|---|---|---|---|---|
| 0~50 mm | 50~100 mm | 100~150 mm | 150~200 mm | |
| Density of soil particles (kg/m3) | 1596 | 1645 | 1736 | 1787 |
| Poisson’s ratio of soil | 0.3 | 0.3 | 0.3 | 0.3 |
| Shear modulus of sand (Pa) | 1.0 × 106 | 1.0 × 106 | 1.0 × 106 | 1.0 × 106 |
| Coefficient of restitution, soil–soil | 0.33 | 0.38 | 0.38 | 0.41 |
| Coefficient of static friction, soil–soil | 0.42 | 0.45 | 0.45 | 0.47 |
| Coefficient of rolling friction, soil–soil | 0.35 | 0.37 | 0.37 | 0.39 |
| Density of steel (kg/m3) | 7865 | 7865 | 7865 | 7865 |
| Poisson’s ratio of steel | 0.3 | 0.3 | 0.3 | 0.3 |
| Shear modulus of steel (Pa) | 7.9 × 1010 | 7.9 × 1010 | 7.9 × 1010 | 7.9 × 1010 |
| Coefficient of restitution, soil–steel | 0.21 | 0.23 | 0.23 | 0.25 |
| Coefficient of static friction, soil–steel | 0.45 | 0.46 | 0.46 | 0.48 |
| Coefficient of rolling friction, soil–steel | 0.55 | 0.57 | 0.57 | 0.59 |
| Density of root (kg/m3) | 1070 | 1070 | 1070 | 1070 |
| Poisson’s ratio of root | 0.56 | 0.56 | 0.56 | 0.56 |
| Shear modulus of root (Pa) | 0.93 × 105 | 0.93 × 105 | 0.93 × 105 | 0.93 × 105 |
| Coefficient of restitution, root–steel | 0.42 | 0.43 | 0.43 | 0.45 |
| Coefficient of static friction, root–steel | 0.13 | 0.14 | 0.14 | 0.17 |
| Coefficient of rolling friction, root–steel | 0.04 | 0.05 | 0.05 | 0.07 |
| Coefficient of restitution, root–soil | 0.14 | 0.15 | 0.15 | 0.16 |
| Coefficient of static friction, root–soil | 0.42 | 0.44 | 0.44 | 0.45 |
| Coefficient of rolling friction, root–soil | 0.05 | 0.06 | 0.06 | 0.08 |
| No. | Rotary Speed (rpm) | Forward Speed (m/s) | Working Depth (mm) |
|---|---|---|---|
| 1 | 270 | 0.5 | 150 |
| 2 | 300 | 0.5 | 150 |
| 3 | 330 | 0.5 | 150 |
| 4 | 270 | 0.5 | 150 |
| 5 | 270 | 0.7 | 150 |
| 6 | 270 | 0.9 | 150 |
| 7 | 270 | 0.5 | 150 |
| 8 | 270 | 0.5 | 160 |
| 9 | 270 | 0.5 | 170 |
| No. | Counter-Rotating Excavation | Positive-Rotating Excavation | ||||
|---|---|---|---|---|---|---|
| Soil Fragmentation Rate/% | Damage Rate/% | Buried Fruit Rate/% | Soil Fragmentation Rate/% | Damage Rate/% | Buried Fruit Rate/% | |
| 1 | 93.56 | 1.35 | 1.28 | 90.67 | 1.56 | 1.37 |
| 2 | 92.48 | 1.41 | 1.36 | 89.96 | 1.54 | 1.43 |
| 3 | 93.74 | 1.45 | 1.33 | 88.57 | 1.61 | 1.45 |
| 4 | 93.45 | 1.38 | 1.42 | 90.28 | 1.57 | 1.56 |
| 5 | 94.27 | 1.52 | 1.51 | 89.67 | 1.68 | 1.64 |
| Average value | 93.50 | 1.42 | 1.38 | 89.83 | 1.59 | 1.49 |
| Type of Excavators | Soil Fragmentation Rate/% | Damage Rate/% | Buried Fruit Rate/% |
|---|---|---|---|
| Counter-rotating excavation | 93.50 | 1.42 | 1.38 |
| New rotary tillage knife | 92.18 | / | 2.07 |
| IT245P | 91.73 | 1.75 | / |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Z.; Wang, D.; Shang, S.; Hou, J.; He, X.; Gao, Z.; Xu, N.; Chang, Z.; Guo, P.; Zheng, X. Analysis of Cyperus esculentus–Soil Dynamic Behavior during Rotary Tillage Based on Discrete Element Method. Agriculture 2023, 13, 358. https://doi.org/10.3390/agriculture13020358
Zhao Z, Wang D, Shang S, Hou J, He X, Gao Z, Xu N, Chang Z, Guo P, Zheng X. Analysis of Cyperus esculentus–Soil Dynamic Behavior during Rotary Tillage Based on Discrete Element Method. Agriculture. 2023; 13(2):358. https://doi.org/10.3390/agriculture13020358
Chicago/Turabian StyleZhao, Zhuang, Dongwei Wang, Shuqi Shang, Jialin Hou, Xiaoning He, Zenghui Gao, Nan Xu, Zengcun Chang, Peng Guo, and Xiaoshuai Zheng. 2023. "Analysis of Cyperus esculentus–Soil Dynamic Behavior during Rotary Tillage Based on Discrete Element Method" Agriculture 13, no. 2: 358. https://doi.org/10.3390/agriculture13020358