
Multi-Index Grading Method for Pear Appearance Quality Based on Machine Vision
Abstract
:1. Introduction
2. Methods
2.1. Pear Feature Extraction
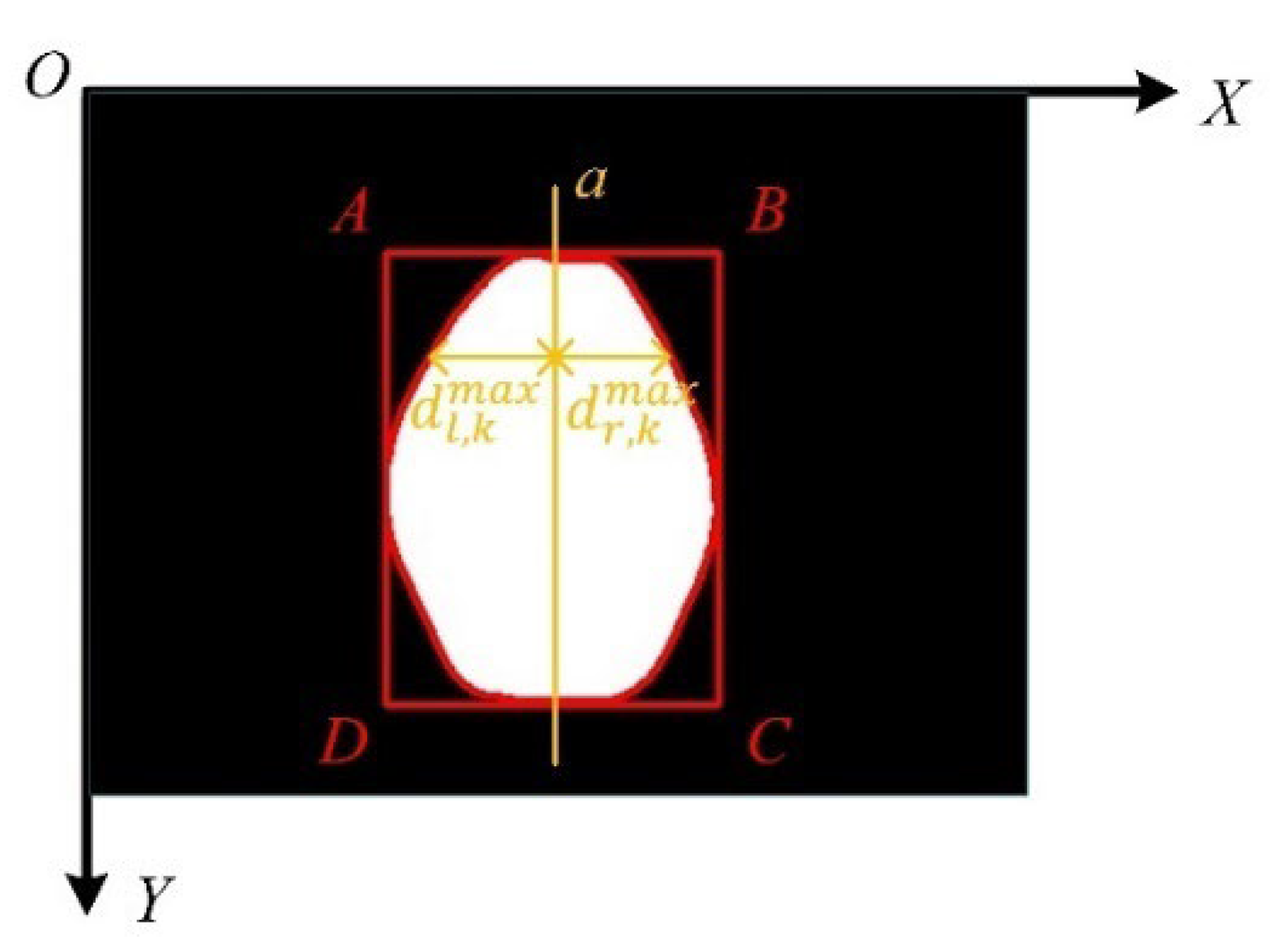
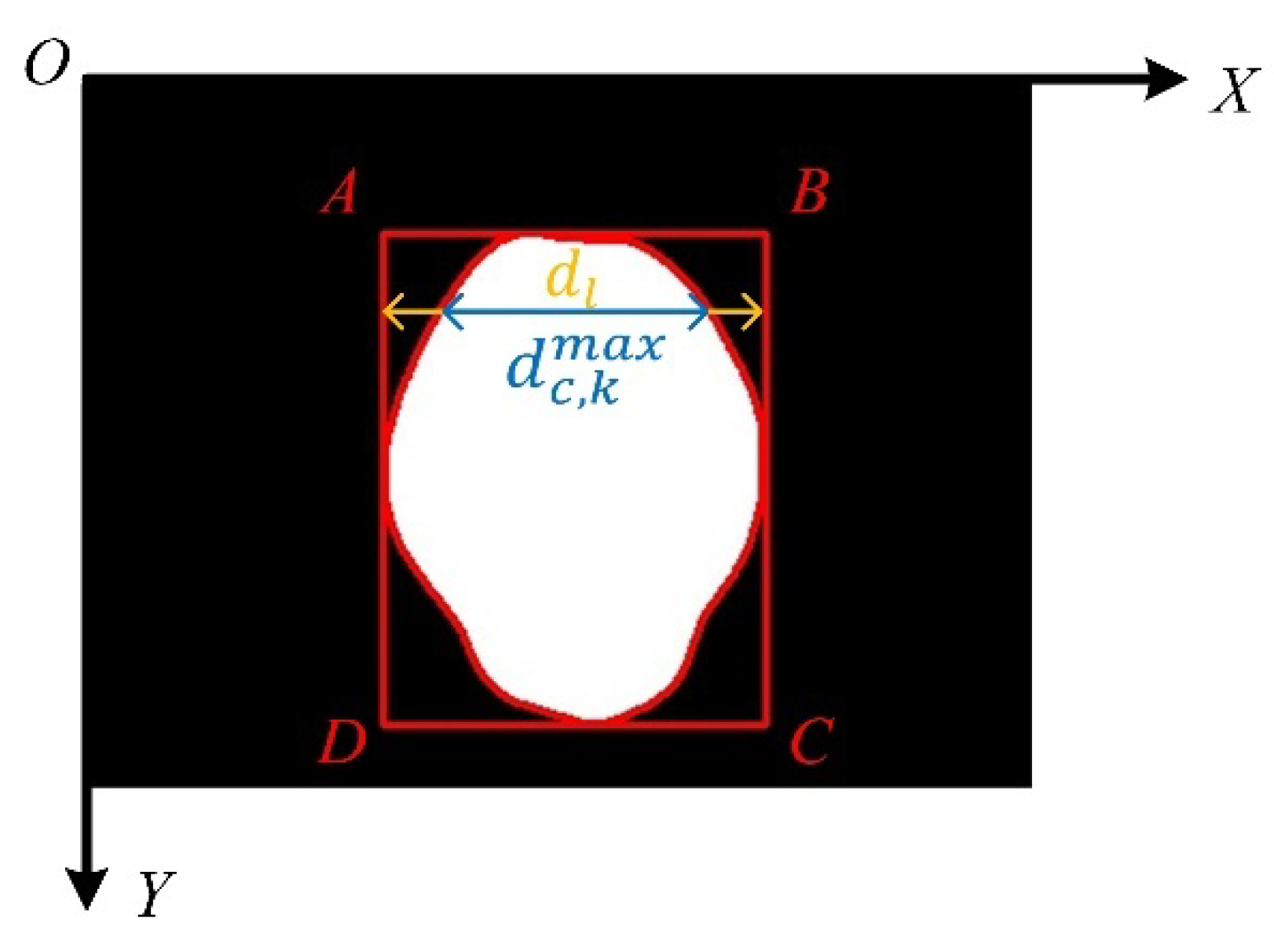
2.1.1. Pear Shape Feature Extraction
2.1.2. Pear Surface Color Feature Extraction
2.1.3. Pear Surface Defect Feature Extraction
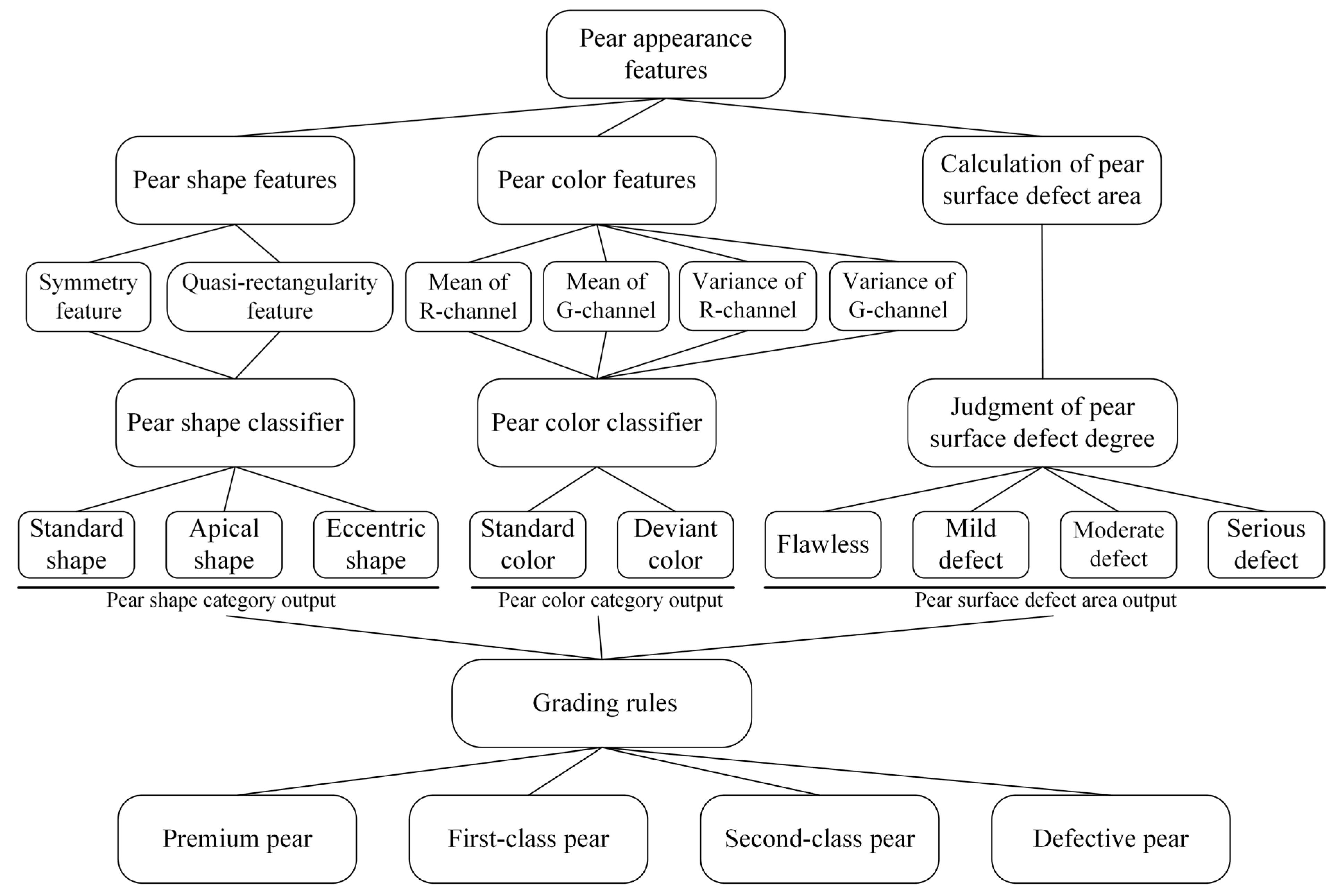
2.2. Pear Grading Method
- Step 1:
- Obtain pear shape features and train classifier;
- Step 2:
- Obtain pear surface color features and train classifier;
- Step 3:
- Input the test set of pear shape features and color features into the trained classifier to predict the pear shape category and color category;
- Step 4:
- Obtain the pear defect area, and judge the pear defect degree;
- Step 5:
- Judge the pear appearance quality category according to the output results of each classifier and the grading rules.
2.2.1. Classification Method of Pear Shape and Surface Defect
- Step 1:
- Preprocess the collected pear appearance images to obtain the pear contour binary image.
- Step 2:
- Set the number of sampling points and then extract the symmetry feature and quasi-rectangularity feature of the pear shape contour.
- Step 3:
- Set the BP neural network hyperparameters and input the training set to complete the training of the pear shape classifier.
- Step 4:
- Input the test set into the trained model to test the classification performance.
- Step 1:
- Preprocess the collected pear appearance images and segment the pear surface defect area images.
- Step 2:
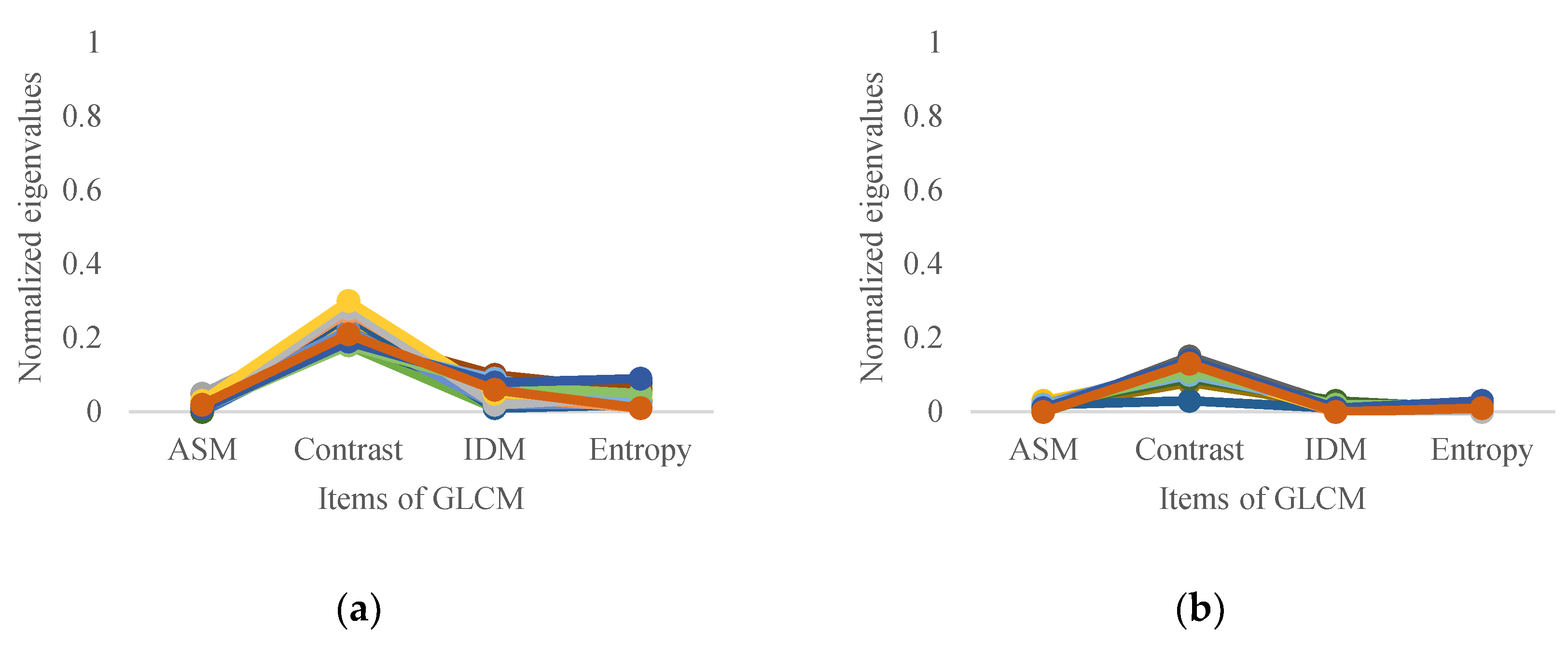
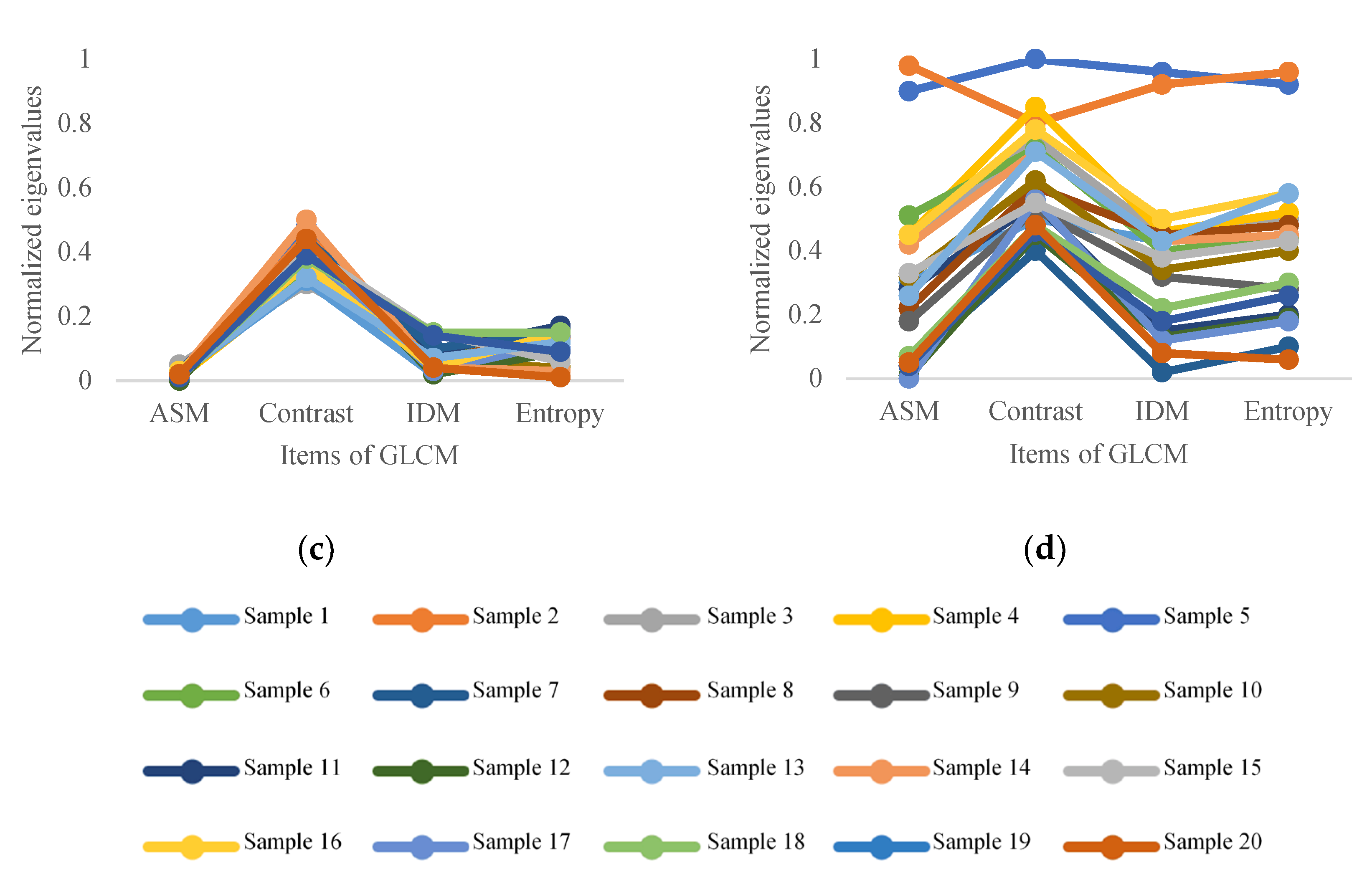
- Extract the ASM, contrast, IDM and entropy features of the pear surface defect region.
- Step 3:
- Set the BP neural network hyperparameters, and input the training set to complete the training of the pear surface defect classifier;
- Step 4:
- Input the test set into the trained model to test the classification performance.
2.2.2. Classification Method of Pear Surface Color
- Step 1:
- Preprocess the collected pear appearance images and segment the pear surface image.
- Step 2:
- Extract the R and G channel means and variance features of the pear surface images.
- Step 3:
- Set the parameter range of the grid search method and train the SVM using the training set.
- Step 4:
- Input the test set into the trained SVM to test the classification performance.
2.2.3. Grading Rules
- Rule 1:
- If the pear shape classifier outputs the standard shape category, the pear surface color classifier outputs the standard color category, and the pear surface is judged to be free of defects, then the final output of pear appearance quality category is “premium pear”.
- Rule 2:
- If the pear shape classifier outputs any shape category, the pear surface color classifier outputs the standard color category, and the judgment of the pear surface defect degree is mild or below, then the final output of pear appearance quality category is “first-class pear”.
- Rule 3:
- If the pear shape classifier outputs any fruit shape category, the pear surface color classifier outputs any color category, and the degree of pear surface defects is judged to be medium or below, then the final output of pear appearance quality category is “second-class pear”.
- Rule 4:
- If the pear shape classifier outputs any shape category, the pear surface color classifier outputs any color category, and the judgment of the pear surface defect degree is serious, then the final output of pear appearance quality category is “defective pear”.
3. Experiments and Results
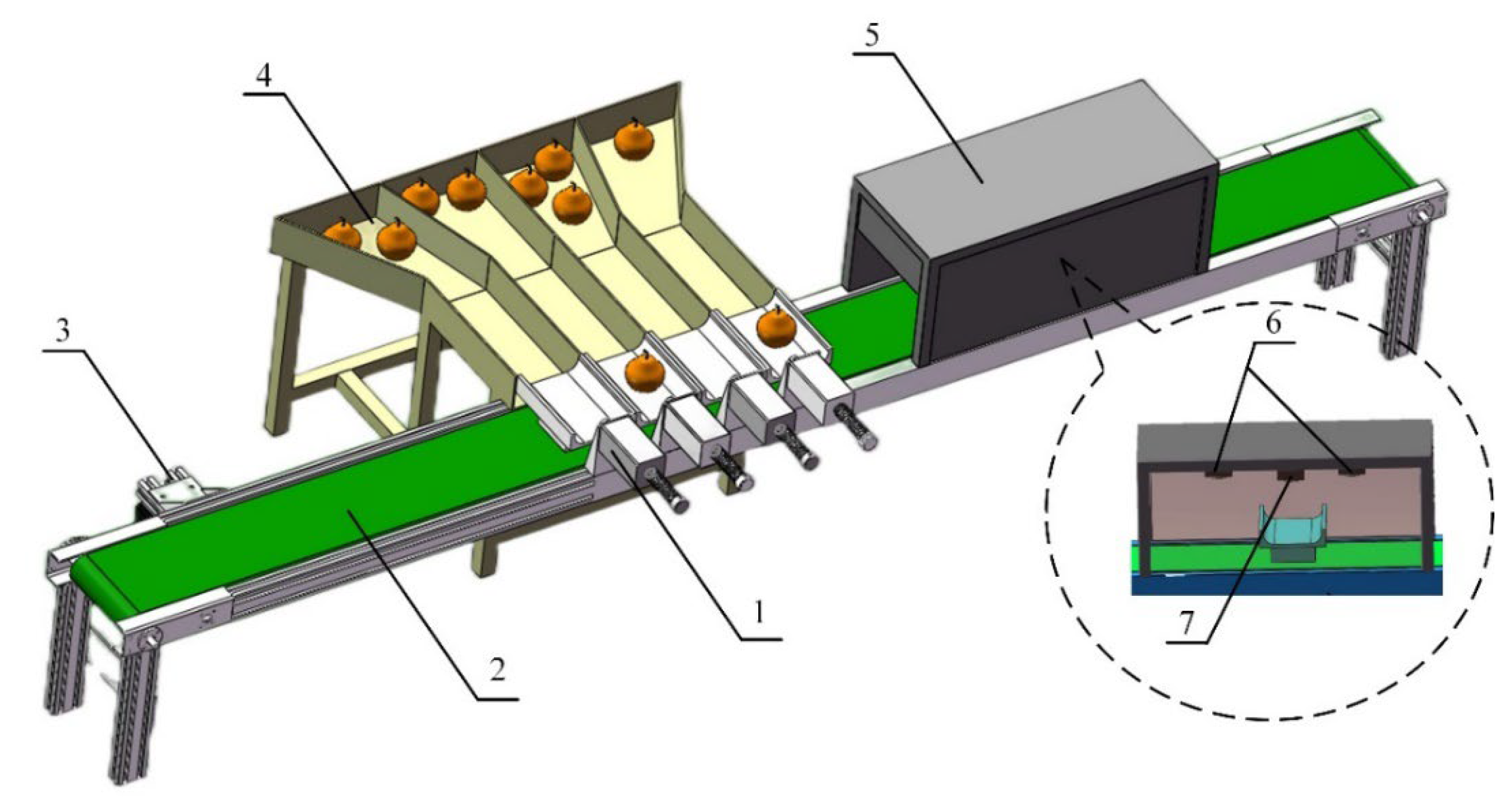
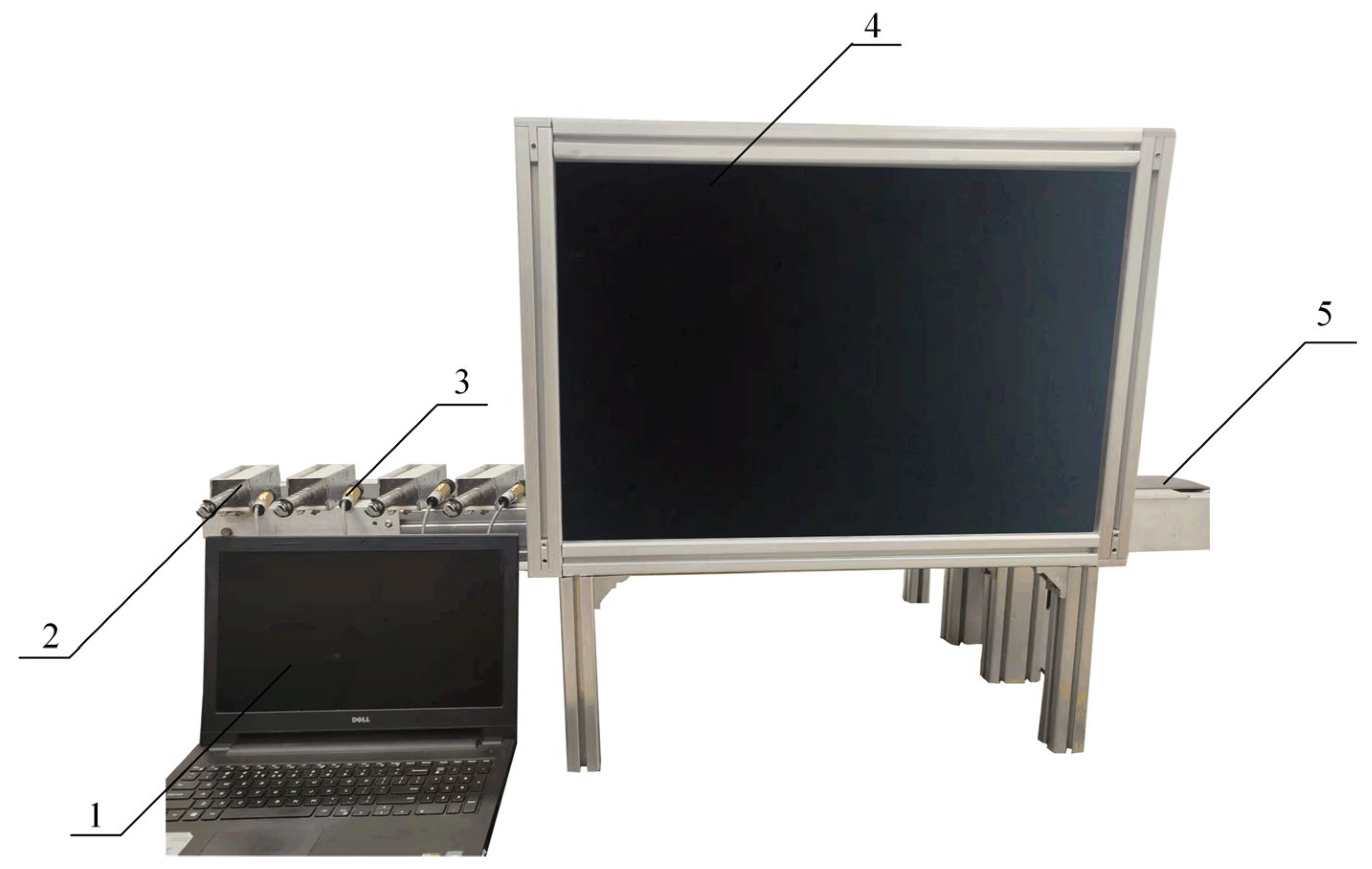
3.1. Image Acquisition and Grading System
3.2. Image Acquisition and Preprocessing
3.3. Feature Analysis
3.4. Classification and Performance Evaluation
3.4.1. Classification Implementation and Hyperparameter Setting
3.4.2. Classification Performance Evaluation
3.4.3. Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gurubelli, Y.; Ramanathan, M.; Ponnusamy, P. Fractional fuzzy 2DLDA approach for pomegranate fruit grade classification. Comput. Electron. Agric. 2019, 162, 95–105. [Google Scholar] [CrossRef]
- Wang, F.; Zheng, J.; Tian, X.; Wang, J.; Niu, L.; Feng, W. An automatic sorting system for fresh white button mushrooms based on image processing. Comput. Electron. Agric. 2018, 151, 416–425. [Google Scholar] [CrossRef]
- Huang, W.; Li, J.; Wang, Q.; Chen, L. Development of a multispectral imaging system for online detection of bruises on apples. J. Food Eng. 2014, 146, 62–71. [Google Scholar] [CrossRef]
- Rajkumar, P.; Wang, N.; Elmasry, G.; Raghavan, G.S.V.; Gariepy, Y. Studies on banana fruit quality and maturity stages using hyperspectral imaging. J. Food Eng. 2011, 108, 194–200. [Google Scholar] [CrossRef]
- Thomas, P.; Kannan, A.; Degwekar, V.H.; Ramamurthy, M.S. Non-destructive detection of seed weevil-infested mango fruits by X-ray imaging. Postharvest Biol. Technol. 1995, 5, 161–165. [Google Scholar] [CrossRef]
- Van, D.M.; Lebotsa, S.; Herremans, E.; Verboven, P.; Sijbers, J.; Opara, U.L.; Cronje, P.J.; Nicolaï, B.M. A segmentation and classification algorithm for online detection of internal disorders in citrus using X-ray radiographs. Postharvest Biol. Technol. 2016, 112, 205–214. [Google Scholar]
- Diego, M.M.G.; Javier, G.G.; Andrea, B.; Fabio, M.; Juan, G.O. Fast tool based on electronic nose to predict olive fruit quality after harvest. Postharvest Biol. Technol. 2020, 160, 111058. [Google Scholar]
- Suchanek, M.; Kordulska, M.; Olejniczak, Z.; Figiel, H.; Turek, K. Application of low-field MRI for quality assessment of ‘Conference’ pears stored under controlled atmosphere conditions. Postharvest Biol. Technol. 2016, 124, 100–106. [Google Scholar] [CrossRef]
- Shi, X.; Chai, X.; Yang, C.; Xia, X.; Sun, T. Vision-based apple quality grading with multi-view spatial network. Comput. Electron. Agric. 2022, 195, 106793. [Google Scholar] [CrossRef]
- Sun, H.; Zhang, S.; Ren, R.; Su, L. Maturity classification of “Hupingzao” jujubes with an imbalanced dataset based on improved MobileNet V2. Agriculture 2022, 12, 1305. [Google Scholar] [CrossRef]
- Nandi, C.S.; Tudu, B.; Koley, C. A machine vision technique for grading of harvested mangoes based on maturity and quality. IEEE Sens. J. 2016, 16, 6387–6396. [Google Scholar] [CrossRef]
- Rafael, R.S.; Sergio, B.; Fernando, A.; Bruno, B.; Souraya, B.; Sergio, C. A smart system for the automatic evaluation of green olives visual quality in the field. Comput. Electron. Agric. 2020, 179, 105858. [Google Scholar]
- Kumar, S.D.; Esakkirajan, S.; Bama, S.; Keerthiveena, B. A microcontroller based machine vision approach for tomato grading and sorting using SVM classifier. Microprocess. Microsyst. 2020, 76, 103090. [Google Scholar] [CrossRef]
- Gu, Y.H.; Yin, H.; Jin, D.; Zheng, R.; Yoo, S.J. Improved multi-plant disease recognition method using deep convolutional neural networks in six diseases of apples and pears. Agriculture 2022, 12, 300. [Google Scholar] [CrossRef]
- Sofu, M.M.; Er, O.; Kayacan, M.C.; Cetisli, B. Design of an automatic apple sorting system using machine vision. Comput. Electron. Agric. 2016, 127, 395–405. [Google Scholar] [CrossRef]
- Mon, T.; ZarAung, N. Vision based volume estimation method for automatic mango grading system. Biosyst. Eng. 2020, 198, 338–349. [Google Scholar] [CrossRef]
- Zhang, Z.; Lu, Y.; Lu, R. Development and evaluation of an apple infield grading and sorting system. Postharvest Biol. Technol. 2021, 180, 111588. [Google Scholar] [CrossRef]
- Fadilah, N.; Saleh, J.M.; Ibrahim, H.; Halim, Z.A. Oil palm fresh fruit bunch ripeness classification using artificial neural network. In Proceedings of the 4th International Conference on Intelligent and Advanced Systems (ICIAS) and a Conference of World Engineering, Science and Technology Congress (ESTCON), Kuala Lumpur, Malaysia, 12–14 June 2012. [Google Scholar]
- Pan, Z.; Wei, X. Computer vision based orange grading using SVM. In Proceedings of the International Conference on Sensors, Measurement and Intelligent Materials (ICSMIM 2012), Guilin, China, 26–27 December 2012. [Google Scholar]
- Azarmdel, H.; Jahanbakhshi, A.; Mohtasebi, S.S.; Munoz, A.R. Evaluation of image processing technique as an expert system in mulberry fruit grading based on ripeness level using artificial neural networks (ANNs) and support vector machine (SVM). Postharvest Biol. Technol. 2020, 166, 111201. [Google Scholar] [CrossRef]
- Bhargava, A.; Bansal, A. Fruits and vegetables quality evaluation using computer vision: A review. J. King Saud Univ.-Comput. Inf. Sci. 2021, 33, 243–257. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Detection Technology | Detection Object | Advantage | Disadvantage |
|---|---|---|---|
| Machine vision technology | Fruit size, shape, external damage, surface defects | Low cost, online inspection of production line | It is difficult to detect the entire surface of the fruit, and it is impossible to identify internal defects and components. |
| Spectroscopy | Surface and internal defects, composition | Detection information is richer than machine vision | The multi band spectral information needs to be screened, the data volume is large, and the processing time is long. |
| X-ray imaging technology | Internal defects, composition | Sensitive to bulk defects, can detect internal defects and components at the same time, especially distinguish between different densities | It is not sensitive to surface defects, the radiation source is expensive, and there is radiation risk. |
| Electronic nose technology | Internal composition, maturity | Evaluate the quality of fruit by its odor signal, easy to handle and fast to detect | It is easily affected by the environment, and the detection accuracy depends on the parameters of the gas sensor. |
| Nuclear Magnetic Resonance Technology | Surface and internal defects, composition | Strong penetrating power, not limited by peel thickness, safe and non-radiation | NMR instruments are expensive and time consuming to process. |
| Device Name | Device Parameters |
|---|---|
| CCD color camera | Firm: Microvision, Camera model: EM-200C, Connection: RJ-45, Resolution: 1600 × 1200, Frame rate: 40, Lens model: BT-23C0828MP10, Focal length: 8 mm, Lens mount: C, Lens field of view: 67.6° × 57.6° × 44°, Adjustment range of aperture: 1:1.28~16 |
| IPC | Network interface card: Gigabit NIC supporting jumbo frame, Communication interface: serial port |
| Controller | Firm: Siemens, Model: S7-200 smart, Communication protocols: RS485 |
| Photoelectric sensor | Firm: OMCH, Model: E3F-DS10C4, Output model: NPN NO, Detection distance: 20~100 mm |
| Push-pull electromagnet | Stroke: 60 mm, Attraction: 20 N |
| Motor | Firm: PERFECT, Model: 57BYG250B, Motor driver: TB6600, Torque: 2.3 NM |
| Power supply | 220 V AC power supply, 24 V DC power supply |
| Shape | Surface Color | Surface Defect | Number of Images | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Standard Shape | Apical Shape | Eccentric Shape | Standard Color | Deviant Color | Flawless | Stabbed Defect | Bruised Defect | Abraded Defect | Rusty Defect | |
| 133 | 129 | 136 | 204 | 194 | 82 | 78 | 85 | 74 | 79 | 398 |
| Classifier | Hyperparameters |
|---|---|
| BP neural network classifier of pear shape | Number of input layer nodes: 100, Number of hidden layer nodes: 50, Number of output layer nodes: 3, Learning rate: 0.3, Number of iterations: 300 |
| SVM classifier of pear surface color | Penalty factor :5, = 1, Kernel: Gaussian kernel |
| BP neural network classifier of pear surface defect | Number of input layer nodes: 4, Number of hidden layer nodes: 85, Number of output layer nodes: 4, Learning rate: 0.23, Number of iterations: 300 |
| Running Time | |||||
|---|---|---|---|---|---|
| Shape classifier | 83.3% | 83.3% | 83.5% | 83.4% | 2.02 s |
| Surface color classifier | 91.0% | 91.1% | 91.0% | 91.9% | 1.06 s |
| Surface defect classifier | 76.6% | 76.9% | 81.5% | 77.9% | 2.34 s |
| Appearance quality classifier | 80.5% | 80.6% | 81.3% | 80.9% | — |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Li, Z.; Hu, N.; Zhang, M.; Zhang, W.; Gao, L.; Ding, X.; Qi, Z.; Duan, S. Multi-Index Grading Method for Pear Appearance Quality Based on Machine Vision. Agriculture 2023, 13, 290. https://doi.org/10.3390/agriculture13020290
Yang Z, Li Z, Hu N, Zhang M, Zhang W, Gao L, Ding X, Qi Z, Duan S. Multi-Index Grading Method for Pear Appearance Quality Based on Machine Vision. Agriculture. 2023; 13(2):290. https://doi.org/10.3390/agriculture13020290
Chicago/Turabian StyleYang, Zeqing, Zhimeng Li, Ning Hu, Mingxuan Zhang, Wenbo Zhang, Lingxiao Gao, Xiangyan Ding, Zhengpan Qi, and Shuyong Duan. 2023. "Multi-Index Grading Method for Pear Appearance Quality Based on Machine Vision" Agriculture 13, no. 2: 290. https://doi.org/10.3390/agriculture13020290