

A Review: Development of Plant Protection Methods and Advances in Pesticide Application Technology in Agro-Forestry Production


Abstract
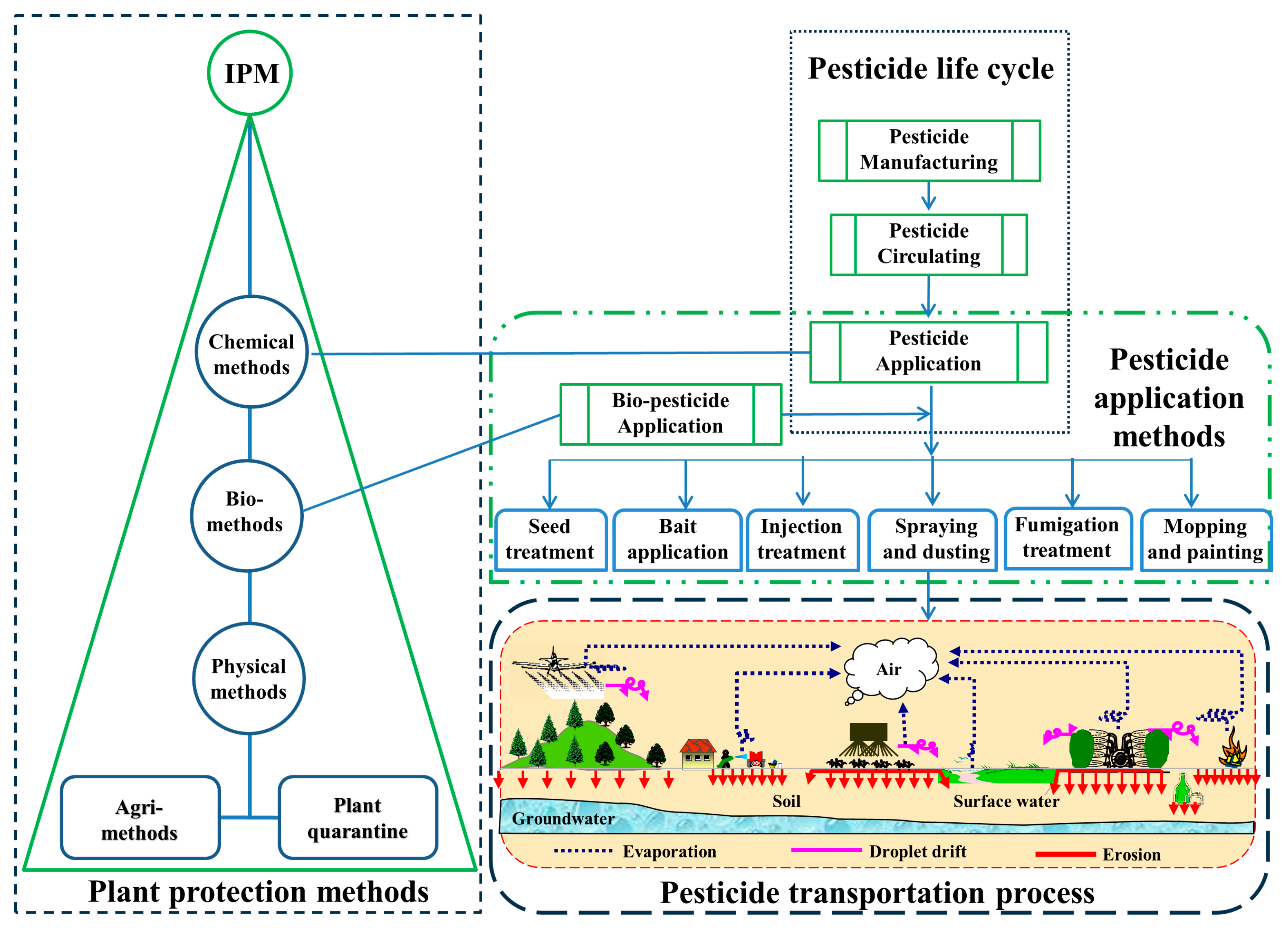
:1. Introduction
2. Target Recognition for Plant Protection
2.1. Plant Diseases
2.2. Insects
2.3. Rats and Rabbits
2.4. Harmful Plants
2.5. Indirect Targets
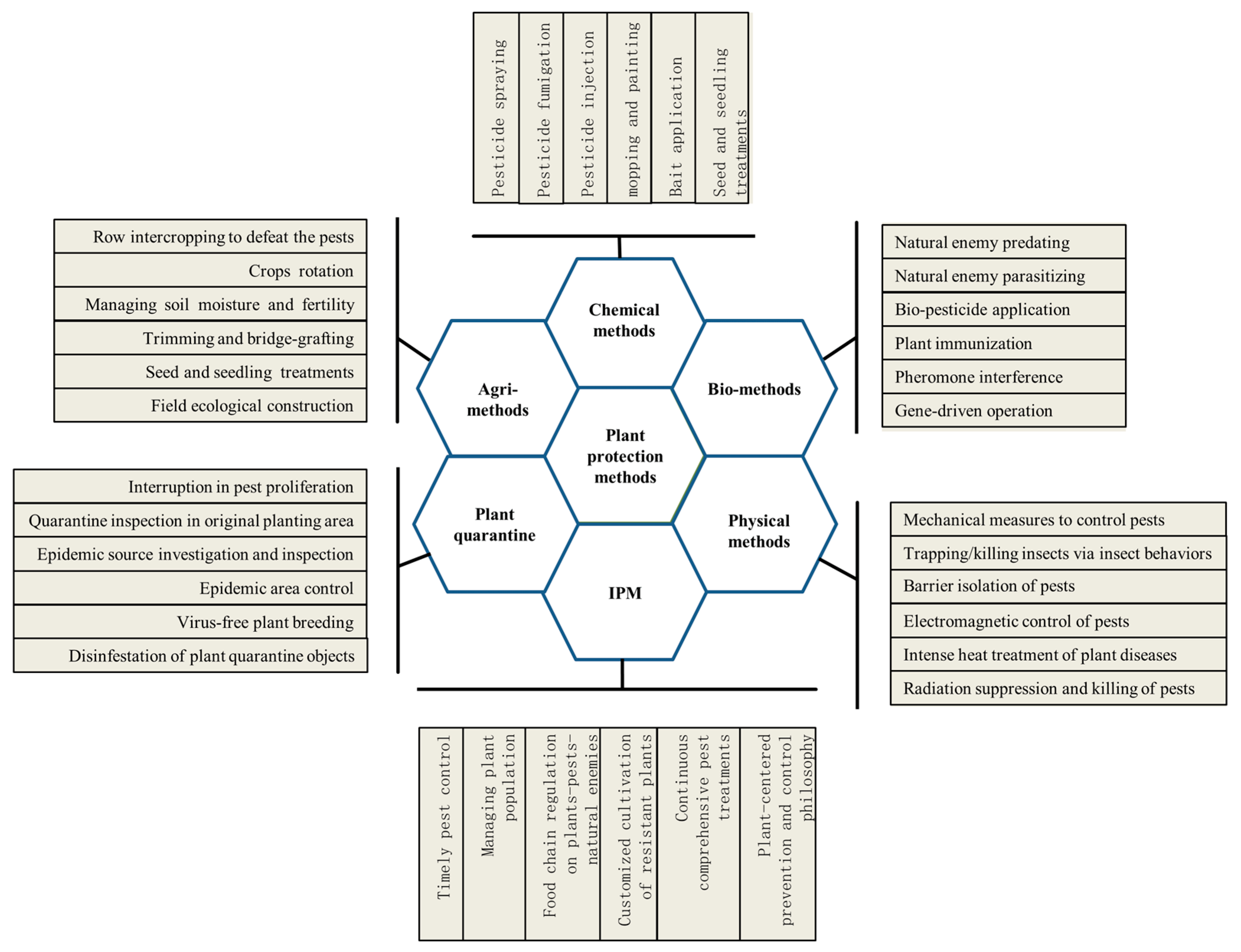
3. Development of Plant Protection Methods
3.1. Agricultural Practice Methods
3.1.1. Row Intercropping to Defeat Pests
3.1.2. Crop Rotation
3.1.3. Managing Soil Moisture and Fertility
3.1.4. Trimming and Bridge-Grafting
3.1.5. Seed and Seedling Treatments
3.1.6. Field Ecological Construction
3.2. Physical Methods
3.2.1. Mechanical Measures to Control Pests
3.2.2. Trapping/Killing Insects via Insect Behaviors
3.2.3. Barrier Isolation of Pests
3.2.4. Electromagnetic Control of Pests
3.2.5. Intense Heat Treatment of Plant Diseases
3.2.6. Radiation Suppression and Killing of Pests
3.3. Bio-Methods
3.3.1. Natural Enemy Predating
3.3.2. Natural Enemy Parasitizing
3.3.3. Bio-Pesticide Application
3.3.4. Plant Immunization
3.3.5. Pheromone Interference
3.3.6. Gene-Driven Operation
3.4. Chemical Methods
3.4.1. Pesticide Spraying
3.4.2. Pesticide Fumigation
3.4.3. Pesticide Injection
3.4.4. Pesticide Mopping and Painting
3.4.5. Bait Application
3.4.6. Seed and Seedling Treatments
3.5. Plant Quarantine
3.5.1. Interruption in Pest Proliferation
3.5.2. Quarantine Inspection in Original Planting Area
3.5.3. Epidemic Source Investigation and Inspection
3.5.4. Epidemic Area Control
3.5.5. Virus-Free Plant Breeding
3.5.6. Disinfestation of Plant Quarantine Objects
3.6. Integrated Pest Management
3.6.1. Timely Pest Control
3.6.2. Managing Plant Populations
3.6.3. Food Chain Regulation of Natural Enemies of Plant Pests
3.6.4. Customized Cultivation of Resistant Plants
3.6.5. Continuous Comprehensive Pest Treatments
3.6.6. Plant-Centered Prevention and Control Philosophy
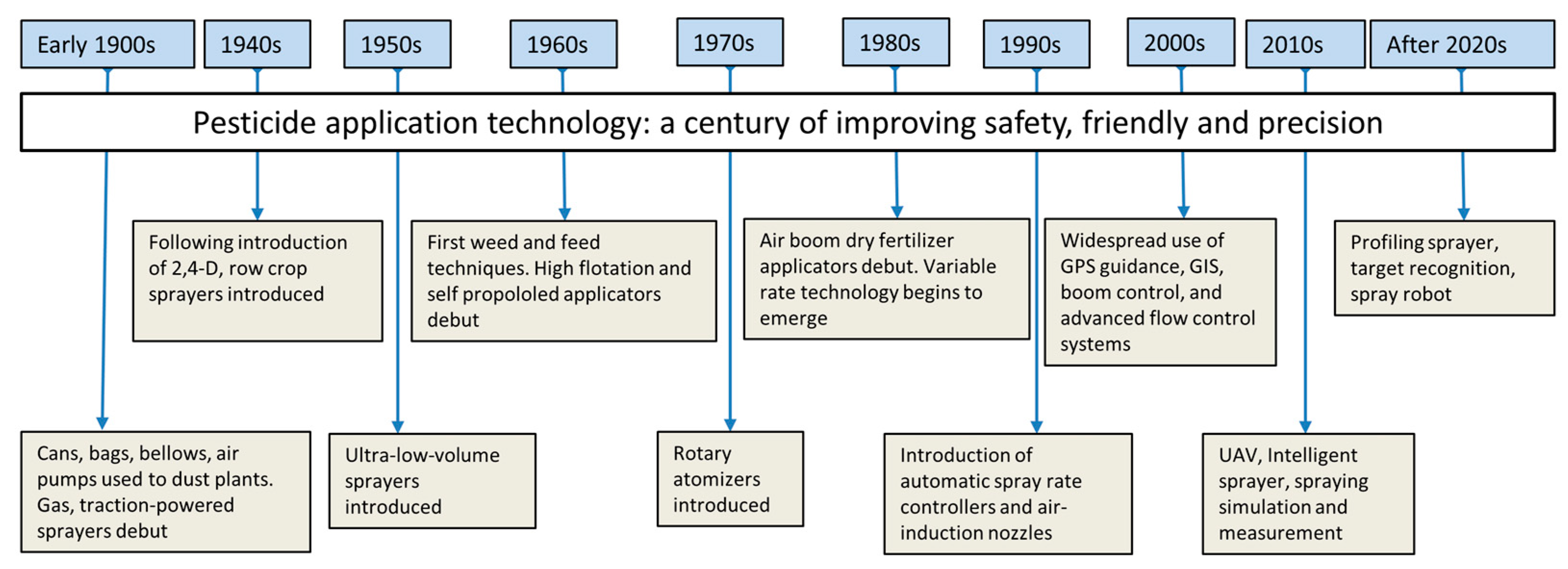
4. Advances in Pesticide Application Technology
4.1. Pesticide-Spraying Machinery
4.2. Pesticide Fumigation Technique
4.3. Pesticide Injection Application Measures
4.4. Pesticide Mopping and Painting Measures
4.5. Bait Application Technique
4.6. Seed and Seedling Enhancement Technology
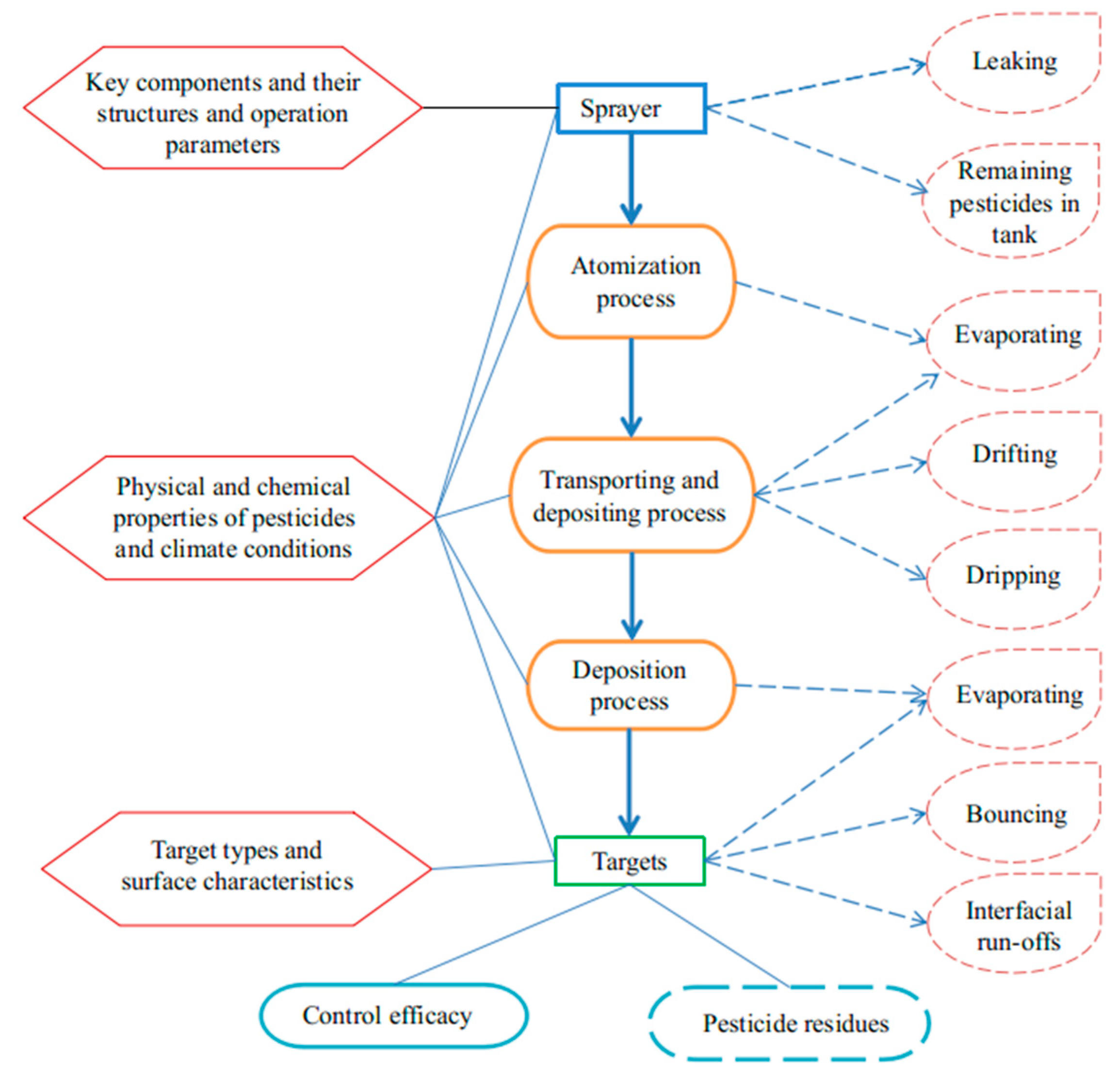
5. Key Technologies for Pesticide-Spraying Systems
5.1. Pesticide-Spraying Process and 3R/3E/3M Analysis
5.2. Key Components of Pesticide Sprayers
5.2.1. Atomizing Nozzles and Nozzle Wear
5.2.2. Variable Rate Control System
5.2.3. Direct Injection System and Inline Mixing
5.2.4. Droplet Drift Control
5.2.5. Sprayer Boom and Boom Balance
5.2.6. Profiling Spraying Mechanism
5.2.7. Flexible Sprayer Chassis
5.3. Performance Measurement of Pesticide-Spraying Process
5.3.1. Measurements in Atomization Process
5.3.2. Measurements in Droplet Transportation and Deposition Processes
5.3.3. Measurements in Deposition Process
5.4. Simulation and Modeling of Pesticide Spraying
5.4.1. Simulation and Modeling of Pesticide Atomization Process
5.4.2. Simulation and Modeling of Pesticide Transportation and Deposition Processes
5.4.3. Simulation and Modeling of Pesticide Deposition Process
5.5. Measurements and Analysis of Pesticide Spraying Efficacy
6. Summary and Future Research Suggestions
- ①
- Develop policies and regulations that focus on human and environmental health to promote harmonious development between humans and nature: formulate strict plant quarantine policies and measures during transportation of personnel and products; formulate further policies related to pesticide application based on strengthening the relationship between operators and applicators, managers, consumers and policymakers;
- ②
- Improve operational skills training regarding plant protection measures: systematically train for plant protection practices and pesticide-spraying operations with required licensing (public or commercial specialty application licenses);
- ③
- Study personal protection technology for pesticide application operators: develop novel and reliable personal protective equipment and make sure that the necessary protective equipment (e.g., gloves, safety glasses, etc.) is worn when applying pesticides in accordance with pesticide product labels;
- ④
- Carry out continuous pesticide residue detection and degradation: maintain food and fiber safety for consumers; ensure the soil fertility and sustainable use of land.
- ①
- Explore more pesticide-free plant protection methods: further develop agricultural measures and physical control methods following ancient Chinese thoughts on plant protection; study novel technologies and equipment for pesticide-free plant protection as science and technology develop;
- ②
- Study new smart pesticide formulations: prepare original pesticides as nano–microemulsions, nano–microcapsules, nano–microspheres, nanogels and other types of nano-pesticides through nanotechnology while giving full play to the advantages of water dispersity, large coverage, good leaf adhesion and long duration; develop smart pesticide formulations to improve the area of effective ingredients in contact with the target and enhance the ability to penetrate the leaves into the plant interior to further improve the absorption of pesticides by plants;
- ③
- Explore new types of biological control (genes, resistant varieties, biopesticides) and plant regulators: study nano-biopesticides with severe advantages such as higher solubility and mobility and lower toxicity based on nanotechnology; develop nucleic acid pesticides with excellent water solubility and strong specificity that cause degradation of transcripts or inhibition of translation through the naturally occurring small nucleic acid interference (RNAi) pathway in the target pests, interfere with the normal growth of target pests and reduce harm to host plants;
- ④
- Develop new methods for pesticide applications: study new measures of additives using inline mixing, drift controlling, target recognition, etc.; study pesticide absorption mechanisms in target plant leaves (such as leaves with hydrophobic surfaces, waxy leaves, leaves with hydrophilic surfaces and hairy leaves); study the synergistic application of smart pesticide formulations and chemical pesticides to delay the resistance of chemical pesticides, reduce environmental pollution and enhance pest control efficacy.
- ①
- Study the modification and innovation of easily operated, environmentally friendly equipment: develop portable electric-driven pesticide-spraying systems with power source modification in diverse agro-forestry production environments; develop other more novel driven power sources to improve the capabilities of pesticide-spraying systems for use in fields away from a power grid, especially those that use batteries that can be recharged by solar panels;
- ②
- Explore autonomous and unmanned plant protection robots: develop plant protection UAVs with multiple functions and stable flight in proximity pesticide applications near target plant canopies; study pesticide-spraying robots to improve efficiency and reduce labor costs in agro-forestry production; develop and install a low-cost robotic system to convert traditional pesticide sprayers into fully autonomous pesticide-spraying robots through the use of real-time machine vision and automatic individual nozzle control with solenoid valves;
- ③
- Establish a systematic, networked and intelligent plant protection machinery system: develop the knowledge base of plant dimensional barcodes and establish cloud-based comprehensive plant AI models to digitally manage plant pests; develop flexible mobile platforms for plant protection with localization and navigation systems, intelligent spraying systems, remote control and human–machine interfaces, etc.; establish a comprehensive plant protection system that complements the collaboration of plant protection robots, plant protection UAVs, ground plant protection machinery based on flexible mobile platforms, fixed plant protection machinery driven by solar energy and all other machinery used in plant protection practices.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Book Name | Author(s) | Written Dynasty | Cited with Keywords | |
| 1 | Zhou Rites | Duke of Zhou | Zhou Dynasty (1046-256 BCE) | Fumigating pests |
| 2 | The Book of Songs·Xiaoya·Datian | Anonymity | Classification of pests Getting rid of pests | |
| 3 | Master Lü’s Spring and Autumn Annals·Buqu | Zuo Qiuming, Lü Buwei | Warring States Period (c. 481-221 BCE) | Killing locusts |
| 4 | Master Lü’s Spring and Autumn Annals·Rendi | Avoiding weeds or insects through deep cultivation | ||
| 5 | Master Huainan·Main Skilling, Garden of Eloquence·Xiuwen | Liu An, Liu Xiang | Han Dynasty (202 BCE-220 AD) | Timely prevention, survival rights of insects |
| 6 | Works of Fan Shengzhi | Fan Shengzhi | Seed treatment | |
| 7 | Annotation for the Zhou Rites | Zheng Xuan | Using illicium anisatum to kill insects via fumigation | |
| 8 | Book of Southern Vegetation | Ji Han | Jin Dynasty (266-420) | Natural enemies of insects |
| 9 | Important Arts for the Peoples Welfare | Jia Sixie | Northern Wei Dynasty (386-534) | Using the burning sun to control pests |
| 10 | Biographies in the Southern Dynasties | Li Yanshou | Tang Dynasty (618-907) | Natural enemies of pests |
| 11 | Wang Zhen’s Book of Agriculture | Wang Zhen | Yuan Dynasty (1271-1368) | Eliminating weeds |
| 12 | Complete Treatise on Agriculture | Xu Guangqi | Ming Dynasty (1368-1644) | Using lime and tung oil to kill pests |
| 13 | On Agriculture | Ma Yilong | Soil and water management | |
| 14 | Shen’s Treatise on Agriculture·Land Administration Rules | Shen, name unknown | Examining and scraping off pests | |
| 15 | Outlines of Agriculture·Principles of Cultivating Crops | Yang Shen, Zheng Shiduo | Qing Dynasty (1616-1912) | Suitable soil and water management |
References
- Wang, Z. On the Record of Locust Plagues in the History of Qin Dynasty. J. Zhengzhou Univ. 2020, 53, 90–98, 124. [Google Scholar]
- Carson, R. Silent Spring; Tianjin People’s Press: Tianjin, China, 2019; ISBN 978-7-201-15036-9. [Google Scholar]
- Bargués-Ribera1, M.; Gokhale, C. Eco-evolutionary agriculture: A study in crop rotations. bioRxiv 2018. [Google Scholar] [CrossRef]
- Panattoni, A.; Luvisi, A.; Triolo, E. Review. Elimination of viruses in plants: Twenty years of progress. Span. J. Agric. Res. 2013, 11, 173–188. [Google Scholar] [CrossRef]
- Kang, S.; Lumactud, R.; Li, N.; Bell, T.; Kim, H.; Park, S.; Lee, Y. Harnessing Chemical Ecology for Environment-Friendly Crop Protection. Phytopathology 2021, 111, 1697–1710. [Google Scholar] [CrossRef] [PubMed]
- Deguine, J.P.; Aubertot, J.N.; Flor, R.J.; Lescourret, F.; Wyckhuys, K.A.; Ratnadass, A. Integrated pest management: Good intentions, hard realities. A review. Agron. Sustain. Dev. 2021, 41, 38. [Google Scholar] [CrossRef]
- Cheng, L. Biological Control in Ancient China. Acta Phytopathol. Sin. 1981, 8, 23–26. [Google Scholar]
- Zhang, R.; Zhang, T.; Ji, W. The Ecological Thoughts in Chinese Traditional Agriculture and its Utilization. Acta Ecol. Sin. 1996, 16, 100–106. [Google Scholar]
- Yan, H. An Ancient Form of Animal Rights Theory-The Theory and Technology of Pest Controlling in Ancient China. J. Nanjing Univ. Sci. Technol. 2005, 18, 85–87. [Google Scholar]
- Zheng, J.; Zhou, H.; Xu, Y. Precision Pesticide Application Technique; Science Press: Beijing, China, 2006; ISBN 7-03-016636-1. [Google Scholar]
- Bode, L.E.; Bretthauer, S. Agricultural chemical application technology: A remarkable past and an amazing future. Trans. ASABE 2008, 51, 391–395. [Google Scholar] [CrossRef]
- Stone, C.; Mohammed, C. Application of remote sensing technologies for assessing planted forests damaged by insect pests and fungal pathogens: A review. Curr. For. Rep. 2017, 3, 75–92. [Google Scholar] [CrossRef]
- Belyakov, N.V.; Nikolina, N.V. Plant protection technologies: From advanced to innovative. J. Phys. Conf. Ser. 2021, 1942, 012072. [Google Scholar] [CrossRef]
- Purcell, A.H. Phytotoxicity, Plant Diseases and Insects. In Encyclopedia of Insects, 2nd ed.; Academic Press: Cambridge, MA, USA, 2009; pp. 800–803. [Google Scholar]
- David, W. Abiotic Factors and Interactions with Urban Pests. In Urban Landscape Entomology; Academic Press: Cambridge, MA, USA, 2020; pp. 45–80. [Google Scholar]
- Liu, M. Brief Introduction to Chinese Insect-Associated Folklore Culture. Agric. Archaeol. 2021, 237–244. Available online: https://d.wanfangdata.com.cn/periodical/ChlQZXJpb2RpY2FsQ0hJTmV3UzIwMjMwODMxEg1ueWtnMjAyMTAxMDM1Gghpbmt1cWNleA== (accessed on 7 October 2023).
- Venkataraman, S.; Badar, U.; Shoeb, E.; Hashim, G.; AbouHaidar, M.; Hefferon, K. An inside look into biological miniatures: Molecular mechanisms of viroids. Int. J. Mol. Sci. 2021, 22, 2795. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.; Zhen, Z. Research progress in the spread of Phytoplasma and PCR detection in forest trees. For. Ecol. Sci. 2021, 36, 8–13, 23. [Google Scholar]
- Zhang, L.; Yin, Y.; Wu, Y.; Zhongkang, W. Regular LAMP and fast LAMP for the detection of Xanthomonas axonopodis pv. citri. Plant Prot. 2013, 39, 95–101. [Google Scholar]
- Lei, R.; Fei, X.; Li, M.; Wu, P.; Wang, X. Development of CRISPR/Cas-based detection method and its application in plant pathogens. Plant Quar. 2021, 35, 1–10. [Google Scholar]
- Kim, S.R.; Lee, W.K.; Lim, C.H.; Kim, M.; Kafatos, M.C.; Lee, S.H.; Lee, S.S. Hyperspectral analysis of pine wilt disease to determine an optimal detection index. Forests 2018, 9, 115. [Google Scholar] [CrossRef]
- Xavier, T.; Souto, R.; Statella, T.; Galbieri, R.; Santos, E.; Suli, G.; Zeilhofer, P. Identification of Ramularia Leaf Blight Cotton Disease Infection Levels by Multispectral, Multiscale UAV Imagery. Drones 2019, 3, 33. [Google Scholar] [CrossRef]
- Cox, K.; Scherm, H.; Serman, N. Ground penetrating radar to detect and quantify residual root fragments following peach orchard clearing. HortTechnology 2005, 15, 600–607. [Google Scholar] [CrossRef]
- Susaeta, A.; Soto, J.R.; Adams, D.C.; Hulcr, J. Expected timber-based economic impacts of a wood-boring beetle (Acanthotomicus sp.) that kills American Sweetgum. J. Econ. Entomol. 2017, 110, 1942–1945. [Google Scholar] [CrossRef]
- Martínez, A.S.; Fischbein, D.; Villacide, J.M.; Corley, J.C. Trapping success and flight behavior of two parasitoid species of the woodwasp Sirex noctilio. Biol. Control 2019, 134, 150–156. [Google Scholar] [CrossRef]
- Liu, X.; Sun, Y.; Cui, J.; Jiang, Q.; Chen, Z.; Luo, Y. Early recognition of feeding sound of trunk borers based on artificial intelligence. Sci. Silvae Sin. 2021, 57, 93–101. [Google Scholar]
- Wilschut, L.I.; Heesterbeek, J.A.; Begon, M.; de Jong, S.M.; Ageyev, V.; Laudisoit, A.; Addink, E.A. Detecting plague-host abundance from space: Using a spectral vegetation index to identify occupancy of great gerbil burrows. Int. J. Appl. Earth Obs. Geoinf. 2018, 64, 249–255. [Google Scholar] [CrossRef]
- Wen, X.; Cheng, X.; Dong, Y.; Wang, Q.; Lin, X. Analysis of the activity rhythms of the great gerbil (Rhombomys opimus) and its predators and their correlations based on infrared camera technology. Glob. Ecol. Conserv. 2020, 24, e01337. [Google Scholar] [CrossRef]
- Internet Center for Wildlife Damage Management. Rabbit Damage Identification. Available online: https://icwdm.org/species/other-mammals/rabbits/rabbit-damage-identification/ (accessed on 2 November 2023).
- Hoque, M.M.; Benigno, E.A.; Palis, F.G.; Olvida, J.L. Evaluation of sampling techniques in assessing rat damage to corn. Philipp. Agric. 1986, 69, 63–70. [Google Scholar]
- Hasan, A.M.; Sohel, F.; Diepeveen, D.; Laga, H.; Jones, M.G. A survey of deep learning techniques for weed detection from images. Comput. Electron. Agric. 2021, 184, 106067. [Google Scholar] [CrossRef]
- Mahmud, M.S.; Zahid, A.; He, L.; Choi, D.; Krawczyk, G.; Zhu, H.; Heinemann, P. Development of a LiDAR-guided section-based tree canopy density measurement system for precision spray applications. Comput. Electron. Agric. 2021, 182, 106053. [Google Scholar] [CrossRef]
- Jia, S.X.; Miao, Q.Y.; Miao, G.L. Important Arts for the Peoples Welfare; Shanghai Ancient Books Publishing House: Shanghai, China, 2006; pp. 29, 42, 52, 311. ISBN 7-5325-4421-4. [Google Scholar]
- Gong, G.; Yang, W. Ancient Practice of Pest Prevention and Control of Biodiversity and Its Implication for Today. J. Shanxi Agric. Univ.Soc. Sci. Ed. 2013, 12, 871–875. [Google Scholar] [CrossRef]
- Xu, G.Q.; Chen, H.L.; Luo, W.H. Complete Treatise on Agriculture; Yuelu Publishing House: Changsha, China, 2002; pp. 33, 562, 607. ISBN 7-80665-211-6. [Google Scholar]
- Van Wyk, A.; Van Staden, E.; Nel, W.; Prinsloo, G. The feasibility of bridge-grafting to restore the flow of sucrose in girdled Ocotea bullata and Curtisia dentata medicinal trees. S. Afr. J. Bot. 2019, 123, 241–252. [Google Scholar] [CrossRef]
- Zaim, N.S.H.B.H.; Tan, H.L.; Rahman, S.M.A.; Abu Bakar, N.F.; Osman, M.S.; Thakur, V.K.; Radacsi, N. Recent Advances in Seed Coating Treatment Using Nanoparticles and Nanofibers for Enhanced Seed Germination and Protection. J. Plant Growth Regul. 2023, 42, 7374–7402. [Google Scholar] [CrossRef]
- Pan, C. The Development of Integrated Pest Control in China. Agric. Hist. 1988, 62, 1–12. Available online: http://www.jstor.org/stable/3743477 (accessed on 7 October 2023).
- Liu, Q.; Zhou, Q.; Cong, X.; An, A.; Nie, Y. Study on Locust Trapping Behavior Regulation Induced by Photoelectric Light. Prog. Mod. Biomed. 2015, 15, 45–52. [Google Scholar]
- Mizrach, A.; Hetzroni, A.; Mazor, M.; Mankin, R.W.; Ignat, T.; Grinshpun, J.; Epsky, N.D.; Shuman, D.; Heath, R.R. Acoustic trap for female Mediterranean fruit flies. Trans. ASAE 2005, 48, 2017–2022. [Google Scholar] [CrossRef]
- Zha, Y.; Wu, X.; Zhang, Z.; Chen, J.; Chen, Q. Influence of ultrasound on juvenile hormone titers in Monochamus alternatus Hope (Coleoptera: Cerambycidae). Sci. Rep. 2021, 11, 1450. [Google Scholar] [CrossRef]
- Hammers, R.L. Picturing Tools for a Perfect Society: Wang Zhen’s ‘Book of Agriculture’ and the Northern Song Reforms in the Yuan Dynasty. J. Song-Yuan Stud. 2012, 42, 279–308. [Google Scholar] [CrossRef]
- Kshetri, S.; Jiken, J.J.; Steward, B.L.; Tang, L.; Tekeste, M.Z. Investigating the effects of interaction of single-tine and rotating -tine mechanisms with soil on weeding performance using simulated weeds. Trans. ASABE 2019, 62, 1283–1291. [Google Scholar] [CrossRef]
- Zhang, L.; Tang, K.; Zhao, Y.; Wang, X.; Yu, D.; Lu, X.; Wang, X. Optimization of leg structure parameter of quadruped laser weeding robot. Trans. CSAE 2020, 36, 7–15. [Google Scholar]
- Shimoda, M.; Honda, K. Insect reactions to light and its applications to pest management. Appl. Entomol. Zool. 2013, 48, 413–421. [Google Scholar] [CrossRef]
- Huang, B.; Lin, G.; Wang, X.; Zhang, X. Control effects of fly nets to the pests of vegetables in greenhouses. Plant Prot. 2013, 39, 164–169, 187. [Google Scholar]
- Feat, A.; Federle, W.; Kamperman, M.; van der Gucht, J. Coatings preventing insect adhesion-An overview. Prog. Org. Coat. 2019, 134, 349–359. [Google Scholar] [CrossRef]
- Zhu, L.; Xue, S.; Chen, J.; Yan, Q. Parameter optimization on killing aphid by using high-voltage electrostatic discharge. Trans. CSAE 2013, 29, 46–51. [Google Scholar]
- Davis, F.; Wayland, J.; Merkle, M. Ultrahigh frequency electromagnetic fields for weed control: Phytotoxicity and selectivity. Science 1971, 173, 535–537. [Google Scholar] [CrossRef]
- Jia, Z.; Ehsani, R.; Zheng, J.; Xu, L.; Zhou, H.; Ding, R. Heating characteristics and field control effect of rapid citrus huanglongbing steam heat treatment. Trans. CSAE 2017, 33, 219–225. [Google Scholar] [CrossRef]
- Freeman, S.; Nizani, Y.; Dotan, S.; Even, S.; Sando, T. Control of Colletotrichum acutatum in Strawberry Under Laboratory, Greenhouse, and Field Conditions. Plant Dis. 1997, 81, 749–752. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Lin, G.; Chen, H.; Wen, S.; Yin, X.; Deng, X. Experiment on Temperature Field Distribution Characteristics of Citrus HLB Far Infrared Heat Treatment. Trans. CSAM 2019, 50, 175–188. [Google Scholar]
- USDA. Radio Frequency Puts the Heat on Plant Pests. Agric. Res. 2003, 51, 15. Available online: https://agresearchmag.ars.usda.gov/ar/archive/2003/feb/radio0203.pdf (accessed on 14 September 2023).
- Rahi, G.; Rich, J. Potential of microwaves to control plant-parasitic nematodes in soil. J. Microw. Power Electromagn. Energy 2008, 42, 5–12. [Google Scholar] [CrossRef]
- Gaetani, R.; Lacotte, V.; Dufour, V.; Clavel, A.; Duport, G.; Gaget, K.; Calevro, F.; Da Silva, P.; Heddi, A.; Vincent, D. Sustainable laser based technology for insect pest control. Sci. Rep. 2021, 11, 11068. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, P. Inactivation of Tilletia controversa Kuhn by Cobalt 60-γ radiation. Plant Quar. 1993, 7, 267–268. [Google Scholar]
- Li, D.; Yuan, X.; Zhang, B.; Zhao, Y.; Song, Z.; Zuo, C. Report of Using Unmanned Aerial Vehicle to Release Trichogramma. Chin. J. Biol. Control. 2013, 29, 455–458. [Google Scholar]
- Bzowska-Bakalarz, M.; Bulak, P.; Bereś, P.K.; Czarnigowska, A.; Czarnigowski, J.; Karamon, B.; Pniak, M.; Bieganowski, A. Using gyroplane for application of Trichogramma spp. Against the European corn borer in maize. Pest Manag. Sci. 2020, 76, 2243–2250. [Google Scholar] [CrossRef]
- Gauthier, P.; Khelifi, M.; Dionne, A.; Todorova, S. Technical feasibility of spraying Trichogramma ostriniae Pupae to control the European corn borer in sweet corn crops. Appl. Eng. Agric. 2019, 35, 185–192. [Google Scholar] [CrossRef]
- Jaber, L.; Ownley, B. Can we use entomopathogenic fungi as endophytes for dual biological control of insect pests and plant pathogens? Biol. Control 2018, 116, 36–45. [Google Scholar] [CrossRef]
- Fife, J.P.; Derksen, R.C.; Ozkan, H.E.; Grewal, P.S.; Chalmers, J.J.; Krause, C.R. Evaluation of a contraction flow field on hydrodynamic damage to entomopathogenic nematodes-a biological pest control agent. Biotechnol. Bioeng. 2010, 86, 96–107. [Google Scholar] [CrossRef]
- Zhai, E.; Zheng, J.; Zhou, H.; Ru, Y.; Li, J. Effects of flat-fan nozzle wear on application of microbial pesticides. J. For. Eng. 2018, 3, 109–116. [Google Scholar]
- Takahashi, H.; Fukuhara, T.; Kitazawa, H.; Kormelink, R. Virus Latency and the Impact on Plants. Front. Microbiol. 2019, 10, 2764. [Google Scholar] [CrossRef]
- Yang, B.; Yang, S.; Zheng, W.; Wang, Y. Plant immunity inducers: From discovery to agricultural application. Stress Biol. 2022, 2, 5. [Google Scholar] [CrossRef]
- Abid, I.; Laghfiri, M.; Bouamri, R.; Aleya, L.; Bourioug, M. Integrated pest management (IPM) for Ectomyelois ceratoniae on date palm. Curr. Opin. Environ. Sci. Health 2021, 19, 100219. [Google Scholar] [CrossRef]
- Wu, S.; Shen, Z.; Fang, M.; Hong, W.; Wo, L.; Liu, T.; Deng, J. Application effect of sex pheromone disorientation on prevention and control of Grapholitha molesta Busck in yellow peach orchard. China Plant Prot. 2020, 40, 52–54. [Google Scholar]
- Zhang, J.; Nong, W.; Wang, F. Broad-spectrum pheromone appear in the insect repellent world. China Science Daily, 12 February 2019. Available online: https://news.sciencenet.cn/sbhtmlnews/2019/2/343344.shtm(accessed on 14 February 2019).
- Yu, M.; Tang, H.; Ye, X. Progresses on Wheat Improvement by Using Transgenic and Genome Editing Technologies. J. Plant Genet. Resour. 2023, 24, 102–116. [Google Scholar]
- Legros, M.; Marshall, J.M.; Macfadyen, S.; Hayes, K.R.; Sheppard, A.; Barrett, L.G. Gene drive strategies of pest control in agricultural systems: Challenges and opportunities. Evol. Appl. 2021, 14, 2162–2178. [Google Scholar] [CrossRef]
- Stejskal, V.; Vendl, T.; Aulicky, R.; Athanassiou, C. Synthetic and Natural Insecticides: Gas, Liquid, Gel and Solid Formulations for Stored-Product and Food-Industry Pest Control. Insects 2021, 12, 590. [Google Scholar] [CrossRef]
- Ye, J.; An, Y.; Qian, L.; Yang, X.; Xu, M.; Wu, C.; Wei, C.; Niu, L.; Gan, Y. Development and application of quarantine insect DNA barcoding technology. Chin. J. Appl. Entomol. 2015, 52, 382–389. [Google Scholar]
- National Forestry and Grassland Administration. Technical Rules for Producing Site Quarantine of Forestry Plants; LY/T 1829-2020; National Forestry and Grassland Administration: Beijing, China, 2020.
- Van Maanen, A.; Xu, X. Modelling plant disease epidemics. Eur. J. Plant Pathol. 2003, 109, 669–682. [Google Scholar] [CrossRef]
- Ministry of Agriculture. Regulations on Plant Quarantine; Ministry of Agriculture: Beijing, China, 1992.
- Van Overbeek, L.; Runia, W.; Kastelein, P.; Molendijk, L. Anaerobic disinfestation of tare soils contaminated with Ralstonia solanacearum biovar 2 and Globodera pallida. Eur. J. Plant Pathol. 2014, 138, 323–330. [Google Scholar] [CrossRef]
- Sirohi, R.; Tarafdar, A.; Gaur, V.K.; Singh, S.; Sindhu, R.; Rajasekharan, R.; Pandey, A. Technologies for disinfection of food grains: Advances and way forward. Food Res. Int. 2021, 145, 110396. [Google Scholar] [CrossRef]
- Matteo, D.; Gudrun, S.; Jochen, K.; Ingolf, S. Complementarity among natural enemies enhances pest suppression. Sci. Rep. 2017, 7, 8172. [Google Scholar] [CrossRef]
- Gaba, S.; Lescourret, F.; Boudsocq, S.; Enjalbert, J.; Hinsinger, P.; Journet, E.; Navas, M.; Wery, J.; Louarn, G.; Malézieux, E.; et al. Multiple cropping systems as drivers for providing multiple ecosystem services from concepts to design. Agron. Sustain. Dev. 2015, 35, 607–623. [Google Scholar] [CrossRef]
- Khan, Z.R.; Pickett, J.A.; Van den Berg, J.; Wadhams, L.J.; Woodcock, C.M. Exploiting chemical ecology and species diversity: Stemborer and striga control for maize and sorghum in Africa. Pest Manag. Sci. 2000, 56, 957–962. [Google Scholar] [CrossRef]
- Pink, D.; Hand, P. Plant resistance and strategies for breeding resistant varieties. Plant Prot. Sci. 2002, 38 (Suppl. S1), 9–13. [Google Scholar] [CrossRef]
- Zou, Y.; de Kraker, J.; Bianchi, F.; Xiao, H.; Huang, J.; Deng, X.; van der Werf, W. Do diverse landscapes provide for effective natural pest control in subtropical rice? J. Appl. Ecol. 2020, 57, 170–180. [Google Scholar] [CrossRef]
- Kumar, S.; Nehra, M.; Dilbaghi, N.; Marrazza, G.; Hassan, A.A.; Kim, K.H. Nano-based smart pesticide formulations: Emerging opportunities for agriculture. J. Control. Release 2018, 294, 131–153. [Google Scholar] [CrossRef] [PubMed]
- Matthews, G.; Bateman, R.; Miller, P. Pesticide Application Methods, 4th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Hu, K.; Zhang, W. Design and experiment of multi-mode hydraulic steering system of high clearance self-propelled sprayer. Trans. CSAM 2020, 51, 366–373. [Google Scholar]
- Dong, X.; Wang, S.; Sun, J. Pesticide Scientific Application Technique; Chemical Industry Press: Beijing, China, 2019; ISBN 978-7-122-33957-7. [Google Scholar]
- Wang, D.; Chen, Q.; Xu, L.; Zhou, H.; Hou, X. Analysis on Atomization Effect of Thermal Atomization Pesticide for Pulsed Smoker/Fogger. Trans. CSAM 2020, 51, 113–122, 130. [Google Scholar] [CrossRef]
- Kulkarni, S.; Nyamagoud, R.; Naik, H.; Futane, M. Fabrication of Portable Foot Operated Agricultural Fertilizers and Pesticides Spraying Pump. Int. J. Eng. Res. Technol. IJERT 2015, 4. [Google Scholar] [CrossRef]
- Zhuang, L.; Li, G.; Qin, W. Development Status of Plant Protection Machinery in China. Agric. Eng. 2021, 11, 9–13. [Google Scholar]
- Sinha, Y.; Chauhan, J.; Tandan, J.; Patel, K.; Kaushik, S. Development of Multipurpose Battery Operated Wheel Sprayer. Int. J. Curr. Microbiol. Appl. Sci. 2019, 8, 1766–1772. [Google Scholar] [CrossRef]
- Rincón, V.J.; Sánchez-Hermosilla, J.; Páez, F.; Pérez-Alonso, J.; Callejón, Á.J. Assessment of the influence of working pressure and application rate on pesticide spray application with a hand-held spray gun on greenhouse pepper crops. Crop Prot. 2017, 96, 7–13. [Google Scholar] [CrossRef]
- Alheidary, M.H.R. Performance of knapsack sprayer: Effect of technological parameters on nanoparticles spray distribution. Int. J. Eng. Trends Technol. IJETT 2017, 46, 199–207. [Google Scholar] [CrossRef]
- Raut, L.P.; Jaiswal, S.B.; Mohite, N.Y. Design, development and fabrication of agricultural pesticides sprayer with weeder. Int. J. Appl. Res. Stud. 2013, 2, 1–8. [Google Scholar]
- Singh, S.; Padhee, D.; Sonwani, S.; Sahu, T. Design, Fabrication and Evaluation of Wheel Operated Sprayer. Int. J. Curr. Microbiol. Appl. Sci. 2020, 9, 1649–1659. [Google Scholar] [CrossRef]
- Sagar, S.B.; Punith, G.; Rakesh, C.N.; Prakash, M.H.; Lakshminarasimha, N. Design and Development of Trolley type Agrochemical Sprayer. In Proceedings of the 5th National Conference on Topical Transcend in Mechanical Technology, SJBIT, Bangalore, India; 2017. Available online: https://www.researchgate.net/publication/326156341 (accessed on 27 September 2023).
- John Deere. Sprayers & Applicators. Available online: https://www.deere.com/en/sprayers/# (accessed on 27 September 2023).
- Wang, X.; Wei, L.; Li, M.; Dong, X.; Huang, W.; Yan, X. Design and Experimental Analysis on the Sugarcane Hanging Type Spray Insecticide Machine of 3WXP—800 with Tractor. Mod. Agric. Equip. 2016, 55–58, 63. [Google Scholar] [CrossRef]
- CropCare. Trailer Sprayer. Available online: https://cropcareequipment.com/trailer-sprayers/ (accessed on 27 September 2023).
- Lan, Y.; Shengde, C.; Fritz, B.K. Current status and future trends of precision agricultural aviation technologies. Int. J. Agric. Biol. Eng. 2017, 10, 1–17. [Google Scholar]
- Yang, L.; Shi, Y.; Feng, H.; Wang, L.; Wang, Z.; Wu, X.; Shi, J.; Dong, N.; Huang, Q. Effect of flight parameters of B-7451 helicopter on distribution pattern of droplet deposition in jujube canopy. J. Fruit Sci. 2019, 36, 338–346. [Google Scholar]
- Liu, Y.; Ru, Y.; Chen, Q.; Chen, X.; Liu, B. Design and test of real-time monitoring system for UAV variable spray. Trans. CSAM 2020, 51, 91–99. [Google Scholar]
- Omar, Z.; Idris, N.; Rahim, M.Z. Preliminary Design of Aerial Spraying System for Microlight Aircraft. J. Phys. Conf. Ser. 2017, 914, 012003. [Google Scholar] [CrossRef]
- Gan, Y.; Zheng, X.; Jiang, Z.; Luo, Y.; Zhou, Y. Effect of ring electrode structure on spray morphology and droplet charging. Trans. CSAM 2019, 50, 387–393. [Google Scholar]
- Yamane, S.; Miyazaki, M. Study on Electrostatic Pesticide Spraying System for Low-Concentration, High-Volume Applications. Jpn. Agric. Res. Q. JARQ 2017, 51, 11–16. [Google Scholar] [CrossRef]
- Hočevar, M.; Širok, B.; Jejčič, V.; Godeša, T.; Lešnik, M.; Stajnko, D. Design and testing of an automated system for targeted spraying in orchards. J. Plant Dis. Prot. 2010, 117, 71–79. [Google Scholar] [CrossRef]
- Peterson, D.L.; Hogmire, H.W. Evaluation of tunnel sprayer systems for dwarf fruit trees. Appl. Eng. Agric. 1995, 11, 817–821. [Google Scholar] [CrossRef]
- Niu, M.; Fang, H.; Qiao, L.; Jian, S.; Zhu, Z.; Peng, Q. Design and experiment of high clearance type recycling tunnel sprayer. J. Chin. Agric. Mech. 2019, 40, 41–48. [Google Scholar]
- Zhang, T.; Yang, X.; Yan, H.; Wang, J.; Dong, X. Anti-drift technology of super-high clearance boom sprayer with air-assisted system. Trans. CSAM 2012, 43, 77–86. [Google Scholar]
- Tsay, J.; Fox, R.D.; Ozkan, H.E.; Brazee, R.D.; Derksen, R.C. Evaluation of a pneumatic-shield spraying system by CFD simulation. Trans. ASAE 2002, 45, 47–54. [Google Scholar] [CrossRef]
- Owen, S.P.; Wise, J.; Grieshop, M.J. Season long pest management efficacy and spray characteristics of a solid set canopy delivery system in high density apples. Insects 2019, 10, 193. [Google Scholar] [CrossRef] [PubMed]
- Imperatore, G.; Ghirardelli, A.; Strinna, L.; Baldoin, C.; Pozzebon, A.; Zanin, G.; Otto, S. Evaluation of a Fixed Spraying System for Phytosanitary Treatments in Heroic Viticulture in North-Eastern Italy. Agriculture 2021, 11, 833. [Google Scholar] [CrossRef]
- Abbas, I.; Liu, J.; Faheem, M.; Noor, R.S.; Shaikh, S.A.; Solangi, K.A.; Raza, S.M. Different sensor based intelligent spraying systems in Agriculture. Sens. Actuators A Phys. 2020, 316, 112265. [Google Scholar] [CrossRef]
- Bahlol, H.Y.; Chandel, A.K.; Hoheisel, G.A.; Khot, L.R. Smart spray analytical system for orchard sprayer calibration: A-proof-of-concept and preliminary results. Trans. ASABE 2020, 63, 29–35. [Google Scholar] [CrossRef]
- Chen, Y.; Tian, L.F.; Zheng, J. Development of weeding robot based on direct herbicide application method. Trans. CSAM 2005, 36, 91–93, 129. [Google Scholar]
- Guzman, J.L.; Rodriguez, F.; Sanchez-Hermosilla, J.; Berenguel, M. Robust pressure control in a mobile robot for spraying tasks. Trans. ASABE 2008, 51, 715–727. [Google Scholar] [CrossRef]
- Meshram, A.T.; Vanalkar, A.V.; Kalambe, K.B.; Badar, A.M. Pesticide spraying robot for precision agriculture: A categorical literature review and future trends. J. Field Robot. 2022, 39, 153–171. [Google Scholar] [CrossRef]
- Cantelli, L.; Bonaccorso, F.; Longo, D.; Melita, C.D.; Schillaci, G.; Muscato, G. A Small Versatile Electrical Robot for Autonomous Spraying in Agriculture. AgriEngineering 2019, 1, 391–402. [Google Scholar] [CrossRef]
- Chaitanya, P.; Kotte, D.; Srinath, A.; Kalyan, K.B. Development of Smart Pesticide Spraying Robot. Int. J. Recent Technol. Eng. IJRTE 2020, 8, 2193–2202. [Google Scholar] [CrossRef]
- Douda, O.; Manasova, M.; Zouhar, M.; Hnatek, J.; Stejskal, V. Field Validation of the Effect of Soil Fumigation of Ethanedinitrile (EDN) on the Mortality of Meloidogyne hapla and Carrot Yield Parameters. Agronomy 2021, 11, 208. [Google Scholar] [CrossRef]
- Ito, M.; Ito, K. Establishing targeted control of creeping perennial weeds with soil-active chemical injections: Assessment of subterranean bud responses in contact. Weed Biol. Manag. 2021, 21, 28–33. [Google Scholar] [CrossRef]
- Fishel, F.M.; Dale, A.G.; Klein, R.W. Pesticide injection and drenching. EDIS 2018. [Google Scholar] [CrossRef]
- Santra, L.; Furiosi, W.J.; Kundu, A.; Rajaraman, S. A minimally-invasive 3D-printed microneedle array applicator system (μNAAS) for delivery of therapeutics to citrus leaf tissue. J. Young Investig. 2021, 39, 60–66. [Google Scholar]
- Jorge, M.G. Sustainable forest management in poplar plantations: Forest Health and Biodiversity Criteria. Ph.D. Thesis, University of Valladolid, Valladolid, Spain, 2012; pp. 163–172. [Google Scholar]
- Pscheidt, J.W. Tree Wound Paints. 2023. Available online: https://pnwhandbooks.org/plantdisease/pesticide-articles/tree-wound-paints (accessed on 7 October 2023).
- Liu, J.; Tang, J.; Yao, C. Design and Development of the Trunk Spraying Machine. Adv. Mater. Res. 2013, 712–715, 2268–2271. [Google Scholar] [CrossRef]
- Zhang, Y.; Gao, S.; Fan, C.; Song, T. Design and experimental study of control system for spraying bait on bait spraying machine for deratization. Trans. CSAE 2014, 30, 66–72. [Google Scholar]
- Wallace, G.P. Advances in Fluid Drilling. HortTechnology 1991, 1, 59–65. [Google Scholar]
- Li, Y.F.; An, J.J.; Dang, Z.H.; Pan, W.L.; Gao, Z.L. Systemic control efficacy of neonicotinoids seeds dressing on English grain aphid (Hemiptera: Aphididae). J. Asia-Pac. Entomol. 2018, 21, 430–435. [Google Scholar] [CrossRef]
- Brown, V.S.; Erickson, T.E.; Merritt, D.J.; Madsen, M.D.; Hobbs, R.J.; Ritchie, A.L. A global review of seed enhancement technology use to inform improved applications in restoration. Sci. Total Environ. 2021, 798, 149096. [Google Scholar] [CrossRef]
- Munro, T.P.; Ritchie, A.L.; Erickson, T.E.; Nimmo, D.G.; Price, J.N. Activated carbon seed technologies provide some protection to seedlings from the effects of post-emergent herbicides. Restor. Ecol. 2023, 31, e13875. [Google Scholar] [CrossRef]
- Yuan, H.; Qi, S.; Yang, D. Studies on Cloudy-dusting in Plastic Tunnel. Acta Phytophylacica Sin. 2000, 27, 364–368. [Google Scholar]
- Gao, L. Some Problems Relating to Atomization Theory in Plant Protection Machinery. Trans. CSAM 1980, 21, 78–88. [Google Scholar]
- Giles, D.K.; Ben-Salem, E. Spray droplet velocity and energy in intermittent flow from hydraulic nozzles. J. Agric. Eng. Res. 1992, 51, 101–112. [Google Scholar] [CrossRef]
- Yang, W.; Jia, W.; Ou, M.; Zhong, W.; Jiang, L.; Wang, X. Effect of Physical Properties of an Emulsion Pesticide on the Atomisation Process and the Spatial Distribution of Droplet Size. Agriculture 2022, 12, 949. [Google Scholar] [CrossRef]
- Ryan, S.D.; Gerber, A.G.; Holloway, A.G.L. A Computational Study of Sprays Produced by Rotary Cage Atomizers. Trans. ASABE 2012, 55, 1133–1148. [Google Scholar] [CrossRef]
- Panneton, B. Geometry and performance of a rotary cup atomizer. Appl. Eng. Agric. 2002, 18, 435–441. [Google Scholar] [CrossRef]
- Zhou, L.; Zhang, X.; Lü, X.; Ding, S. Numerical simulation and experimental study on the wind performance of the disc atomizer. Trans. CSAM 2012, 43, 72–75, 81. [Google Scholar]
- Lakhiar, I.A.; Gao, J.; Xu, X.; Syed, T.N.; Chandio, F.A.; Jing, Z.; Buttar, N.A. Effects of various aeroponic atomizers (droplet sizes) on growth, polyphenol content, and antioxidant activity of leaf lettuce (Lactuca sativa L.). Trans. ASABE 2019, 62, 1475–1487. [Google Scholar] [CrossRef]
- Himel, C.M. The optimum size for insecticide spray droplets. J. Econ. Entomol. 1969, 62, 919–926. [Google Scholar] [CrossRef]
- Scott, L.P. Drift of droplets from air-induction nozzles. Trans. ASABE 2019, 62, 1683–1687. [Google Scholar]
- Womac, A.R.; Bui, Q.D. Design and tests of a variable-flow fan nozzle. Trans. ASAE 2002, 45, 287–295. [Google Scholar] [CrossRef]
- Bode, L.E.; Langley, T.E.; Butler, B.J. Performance characteristics of bypass spray nozzles. Trans. ASAE 1979, 22, 1016–1022. [Google Scholar] [CrossRef]
- Giles, D.K.; Comino, J.A. Droplet size and spray pattern characteristics of an electronic flow controller for spray nozzles. J. Agric. Eng. Res. 1990, 47, 249–267. [Google Scholar] [CrossRef]
- Kim, S.K.; Ahmad, H.; Moon, J.W.; Jung, S.Y. Nozzle with a Feedback Channel for Agricultural Drones. Appl. Sci. 2021, 11, 2138. [Google Scholar] [CrossRef]
- Rockwell, A.D.; Agers, P.D. Variable rate sprayer development and evaluation. Appl. Eng. Agric. 1994, 10, 307–333. [Google Scholar] [CrossRef]
- Llorens, J.; Gil, E.; Llop, J.; Escolà, A. Variable rate dosing in precision viticulture: Use of electronic devices to improve application efficiency. Crop Prot. 2010, 29, 239–248. [Google Scholar] [CrossRef]
- Yan, T.; Zhu, H.; Sun, L.; Wang, X.; Ling, P. Investigation of an experimental laser sensor-guided spray control system for greenhouse variable-rate applications. Trans. ASABE 2019, 62, 899–911. [Google Scholar] [CrossRef]
- Fu, J.; Chen, C.; Zhao, R.; Ren, L. Accurate Variable Control System for Boom Sprayer Based on Auxiliary Antidrift System. J. Sens. 2020, 2020, 8037046. [Google Scholar] [CrossRef]
- Seol, J.; Kim, J.; Son, H. Field evaluations of a deep learning-based intelligent spraying robot with flow control for pear orchards. Precis. Agric. 2022, 23, 712–732. [Google Scholar] [CrossRef]
- Womac, A.; Valcore, D.; Maynard, R. Variable-concentration direct injection from fixed-ratio diluent-driven pumps. Trans. ASAE 2002, 45, 1721–1728. [Google Scholar] [CrossRef]
- Vondricka, J.; Lammers, P.S. Real-time controlled direct injection system for precision farming. Precis. Agric. 2009, 10, 421–430. [Google Scholar] [CrossRef]
- Song, H.; Xu, Y.; Zheng, J.; Wang, X.; Zhang, M. Structural analysis and mixing uniformity experiments of swirling jet mixer for applying fat-soluble pesticides. Trans. CSAE 2016, 32, 86–92. [Google Scholar]
- Zhang, Z.; Zhu, H.; Hu, C. Hardware and software design for premixing in-line injection system attached to variable-rate orchard sprayer. Trans. ASABE 2020, 63, 823-821. [Google Scholar] [CrossRef]
- Peteinatos, G.G.; Kollenda, B.; Wang, P.; Gerhards, R. A new logarithmic sprayer for dose-response studies in the field. Comput. Electron. Agric. 2019, 157, 166–172. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, P. Experimental study on double-stage on-line jet mixing apparatus. Int. J. Model. Simul. Sci. Comput. 2022, 13, 2142001. [Google Scholar] [CrossRef]
- Nuyttens, D.D.S.M.; De Schampheleire, M.; Baetens, K.; Brusselman, E.; Dekeyser, D.; Verboven, P. Drift from field crop sprayers using an integrated approach: Results of a 5 year study. Trans. ASABE 2011, 54, 403–408. [Google Scholar] [CrossRef]
- França, J.A.; da Cunha, J.P.; Antuniassi, U.R. Spectrum and velocity of droplets of spray nozzles with and without air induction. Eng. Agrícola Jaboticabal 2018, 38, 232–237. [Google Scholar] [CrossRef]
- Cui, L.F.; Xue, X.Y.; Ding, S.M.; Le, F.X. Development of a DSP-based electronic control system for the active spray boom suspension. Comput. Electron. Agric. 2019, 166, 105024. [Google Scholar] [CrossRef]
- He, Y.; Qiu, B.; Yang, Y.; Ma, J. Deformation analysis and control of elastic deformation for spray boom based on finite element model. Trans. CSAE 2014, 30, 28–36. [Google Scholar]
- Zhuang, T.F.; Yang, X.J.; Dong, X.; Zhang, T.; Yan, H.R.; Sun, X. Research status and development trend of large self-propelled sprayer booms. Trans. CSAM 2018, 49, 189–198. [Google Scholar]
- Ma, L.; Xu, Y.; Zheng, J.; Dai, X. Ecodesign method of intelligent boom sprayer based on preferable Brownfield process. J. Clean. Prod. 2020, 268, 122206. [Google Scholar] [CrossRef]
- Duga, A.T.; Ruysen, K.; Dekeyser, D.; Nuyttens, D.; Bylemans, D.; Nicolai, B.M.; Verboven, P. Spray deposition profiles in pome fruit trees: Effects of sprayer design, training system and tree canopy characteristics. Crop Prot. 2015, 67, 200–213. [Google Scholar] [CrossRef]
- Al-Gaadi, K.A.; Paul, D.A. Integrating GIS and GPS into a spatially variable rate herbicide application system. Appl. Eng. Agric. 1999, 15, 255–262. [Google Scholar] [CrossRef]
- Liu, L.; Pan, Y.; Chen, Z.; Wang, Y.W.; Li, Y.W.; Chen, L.Q. Inter-rows navigation method for corn crop protection vehicles under high occlusion environment. Trans. CSAM 2020, 51, 11–17. [Google Scholar]
- Scott, L.P.; Rory, L.R. A review of the effects of droplet size and flow rate on the chargeability of spray droplets in electrostatic agricultural sprays. Trans. ASABE 2018, 61, 1243–1248. [Google Scholar]
- Dodge, L.G. Comparison of performance of drop-sizing instruments. Appl. Opt. 1987, 26, 1328–1341. [Google Scholar] [CrossRef]
- Zhao, J.; Nie, W.; Lin, W.; Su, L. Research progress of optical measurement of particle size in spray. Laser Technol. 2019, 43, 702–707. [Google Scholar]
- Luck, J.D.; Shearer, S.A.; Sama, M.P. Development and preliminary evaluation of an integrated individual nozzle direct injection and carrier flow rate control system for pesticide applications. Trans. ASABE 2019, 62, 505–514. [Google Scholar] [CrossRef]
- Price, R.R. A low-cost spot laser and camera system for fluorescent dye detection of agricultural aircraft pattern collection strings. Appl. Eng. Agric. 2018, 34, 187–193. [Google Scholar] [CrossRef]
- Shi, Q.; Mao, H.; Guan, X. Numerical simulation and experimental verification of the deposition concentration of an unmanned aerial vehicle. Appl. Eng. Agric. 2019, 35, 367–376. [Google Scholar] [CrossRef]
- Dai, S.; Zhang, J.; Jia, W.; Ou, M.; Zhou, H.; Dong, X.; Chen, H.; Wang, M.; Chen, Y.; Yang, S. Experimental Study on the Droplet Size and Charge-to-Mass Ratio of an Air-Assisted Electrostatic Nozzle. Agriculture 2022, 12, 889. [Google Scholar] [CrossRef]
- Gil, E.; Balsari, P.; Gallart, M.; Llorens, J.; Marucco, P.; Andersen, P.G.; Fàbregas, X.; Llop, J. Determination of drift potential of different flat fan nozzles on a boom sprayer using a test bench. Crop Prot. 2014, 56, 58–68. [Google Scholar] [CrossRef]
- Richardson, B.; Rolando, C.A.; Kimberley, M.O. Quantifying spray deposition from a UAV configured for spot spray applications to individual plants. Trans. ASABE 2020, 63, 1049–1058. [Google Scholar] [CrossRef]
- Schramm, M.W.; Hanna, H.M.; Darr, M.J.; Hoff, S.J.; Steward, B.L. Measuring sub-second wind velocity changes for agricultural drift one meter above the ground. Appl. Eng. Agric. 2019, 35, 697–704. [Google Scholar] [CrossRef]
- Jomantas, T.; Lekavičienė, K.; Steponavičius, D.; Andriušis, A.; Zaleckas, E.; Zinkevičius, R.; Popescu, C.V.; Salceanu, C.; Ignatavičius, J.; Kemzūraitė, A. The Influence of Newly Developed Spray Drift Reduction Agents on Drift Mitigation by Means of Wind Tunnel and Field Evaluation Methods. Agriculture 2023, 13, 349. [Google Scholar] [CrossRef]
- Kasner, E.J.; Fenske, R.A.; Hoheisel, G.A.; Galvin, K.; Blanco, M.N.; Seto, E.Y.W.; Yost, M.G. Spray Drift from a Conventional Axial Fan Airblast Sprayer in a Modern Orchard Work Environment. Ann. Work. Expo. Health 2018, 62, 1134–1146. [Google Scholar] [CrossRef]
- Wang, L.; Song, W.; Lan, Y.; Wang, H.; Yue, X.; Yin, X.; Tang, Y. A Smart Droplet Detection Approach With Vision Sensing Technique for Agricultural Aviation Application. IEEE Sens. J. 2021, 21, 17508–17516. [Google Scholar] [CrossRef]
- Massinon, M.; De Cock, N.; Forster, W.A.; Nairn, J.J.; McCue, S.W.; Zabkiewicz, J.A.; Lebeau, F. Spray droplet impaction outcomes for different plant species and spray formulations. Crop Prot. 2017, 99, 65–75. [Google Scholar] [CrossRef]
- Li, H.; Niu, X.; Ding, L.; Tahir, A.S.; Guo, C.; Chai, J.; Zhang, K.; Cheng, S.; Zhao, Y.; Zhang, Y.; et al. Dynamic spreading characteristics of droplet impinging soybean leaves. Int. J. Agric. Biol. Eng. 2021, 14, 32–45. [Google Scholar] [CrossRef]
- Dorr, G.J.; Wang, S.; Mayo, L.C.; McCue, S.W.; Forster, W.A.; Hanan, J.; He, X. Impaction of spray droplets on leaves: Influence of formulation and leaf character on shatter, bounce and adhesion. Exp. Fluids 2015, 56, 143. [Google Scholar] [CrossRef]
- Nairn, J.J.; Forster, W.A.; Van Leeuwen, R.M. Quantification of physical (roughness) and chemical (dielectric constant) leaf surface properties relevant to wettability and adhesion. Pest Manag. Sci. 2011, 67, 1562–1570. [Google Scholar] [CrossRef]
- Sharpe, S.M.; Boyd, N.S.; Dittmar, P.J.; MacDonald, G.E.; Darnell, R.L.; Ferrell, J.A. Spray penetration into a strawberry canopy as affected by canopy structure, nozzle type, and application volume. Weed Technol. 2018, 32, 80–84. [Google Scholar] [CrossRef]
- Boukhalfa, H.; Massinon, M.; Belhamra, M.; Lebeau, F. Contribution of spray droplet pinning fragmentation to canopy retention. Crop Prot. 2014, 56, 91–97. [Google Scholar] [CrossRef]
- Teske, M.E.; Thistle, H.W.; Riley, C.M.; Hewitt, A.J. Laboratory measurements of evaporation rate of droplets at low relative wind speed. Trans. ASABE 2018, 61, 919–923. [Google Scholar] [CrossRef]
- Sama, M.P.; Weiss, A.M.; Benedict, E.K. Validating spray coverage rate using liquid mass on a spray card. Trans. ASABE 2018, 61, 887–895. [Google Scholar] [CrossRef]
- Scott, L.P.; Hewitt, A.J. Flat-fan spray atomization model. Trans. ASABE 2018, 61, 1249–1256. [Google Scholar]
- Luca, M.D.; Vallet, A. Pesticide atomization modelling for hollow cone nozzle. At. Sprays 2009, 19, 741–753. [Google Scholar] [CrossRef]
- Lafferty, C.L.; Tian, L.F. Using Computation Fluid Dynamics to Determine the Effect of Internal Nozzle Flow on Droplet Size; ASAE International Annual Meeting: Sacramento, CA, USA, 2001. [Google Scholar]
- Wei, Z.; Hou, Y.R.; Liu, X.Z.; Lian, Q. Wind tunnel experimental study on droplet drift reduction by a conical electrostatic nozzle for pesticide spraying. Int. J. Agric. Biol. Eng. 2017, 10, 87–94. [Google Scholar]
- Zhao, C.; Chai, S.; Chen, L.; Zhang, R.; Li, L.; Tang, Q. Establishment and experiment of quadratic residual compensation atomization model of electricity atomizer. Trans. CSAM 2020, 51, 19–27, 37. [Google Scholar]
- Zhai, C.; Wang, X.; Mi, Y.; Fan, P.; Ma, Y. Nozzle flow model of PWM variable-rate spraying. Trans. CSAM 2012, 43, 40–44. [Google Scholar]
- Sidahmed, M.M.; Brown, R.B. Simulation of spray dispersal and deposition from a forestry airblast sprayer-part II: Droplet trajectory model. Trans. ASAE 2001, 44, 5–17. [Google Scholar] [CrossRef]
- Lebeau, F. Modelling the dynamic distribution of spray deposits. Biosys. Eng. 2004, 89, 255–265. [Google Scholar] [CrossRef]
- Delele, M.A.; De Moor, A.; Sonck, B.; Ramon, H.; Nicolaï, B.M.; Verboven, P. Modeling and validation of the air flow generated by a cross flow air-sprayer as affected by travel speed and fan speed. Biosyst. Eng. 2005, 92, 165–174. [Google Scholar] [CrossRef]
- Fu, Z.; Wang, J.; Qi, L.; Wang, H. CFD simulation and experimental verification of air-velocity distribution of air-assisted orchard sprayer. Trans. CSAE 2009, 25, 69–74. [Google Scholar]
- Sun, G.; Wang, X.; Ding, W.; Zhang, Y. Simulation analysis on characteristics of droplet deposition base on CFD discrete phase model. Trans. CSAE 2012, 28, 13–19. [Google Scholar]
- Ding, W.; Zhu, F.; Jin, M.; Xu, L.; Zhang, Y. Simulation and visualization of spraying droplets behavior and deposition within virtual rice canopy. Int. J. Agric. Biol. Eng. 2022, 15, 19–27. [Google Scholar] [CrossRef]
- Ru, Y.; Jia, Z.; Zhou, H.; Shu, C. Research on moving trajectory simulation of charged droplets. Chin. Agric. Mechan. 2011, 51–55. [Google Scholar] [CrossRef]
- Yuan, J.; Liu, X.; Zhang, X.; Zuo, W.; Wang, X.; Chen, L. Modeling and compensation for characteristic of droplet drift on air-assisted boom spraying accounting for wind speeds. Trans. CSAE 2013, 29, 45–52. [Google Scholar]
- Baetens, K.; Nuyttens, D.; Verboven, P.; De Schampheleire, M.; Nicolaï, B.; Ramon, H. Predicting drift from field spraying by means of 3D computational fluid dynamics model. Comput. Electron. Agric. 2007, 56, 161–173. [Google Scholar] [CrossRef]
- Hong, S.W.; Park, J.; Jeong, H.; Lee, S.; Choi, L.; Zhao, L.; Zhu, H. Fluid Dynamic Approaches for Prediction of Spray Drift from Ground Pesticide Applications: A Review. Agronomy 2021, 11, 1182. [Google Scholar] [CrossRef]
- USEPA. Models for Pesticide Risk Assessment. Available online: https://www.epa.gov/pesticide-science-and-assessing-pesticide-risks/models-pesticide-risk-assessment (accessed on 27 December 2020).
- Teske, M.E.; Thistle, H.W.; Fritz, B.K. Modeling aerially applied sprays: An update to AGDISP model development. Trans. ASABE 2019, 62, 343–354. [Google Scholar] [CrossRef]
- Mercer, G.N.; Sweatman, W.L.; Forster, W.A. A model for spray droplet adhesion, bounce or shatter at a crop leaf surface. Math. Ind. 2010, 15, 945–951. [Google Scholar]
- Dorr, G.J.; Kempthorne, D.M.; Mayo, L.C.; Forster, W.A.; Zabkiewicz, J.A.; McCue, S.W.; Belward, J.A.; Turner, I.W.; Hanan, J. Towards a model of spray–canopy interactions: Interception, shatter, bounce and retention of droplets on horizontal leaves. Ecol. Model. 2014, 290, 94–101. [Google Scholar] [CrossRef]
- Ru, Y.; Hu, C.; Chen, X.; Yang, F.; Zhang, C.; Li, J.; Fang, S. Droplet Penetration Model Based on Canopy Porosity for Spraying Applications. Agriculture 2023, 13, 339. [Google Scholar] [CrossRef]
- de Lima Junior, I.D.S.; Degrande, P.E.; de Souza, C.M.A. Droplet distribution as a function of cotton interrow spacing and angles of sprayer displacement. Eng. Agrícola Jaboticabal 2018, 38, 927–933. [Google Scholar] [CrossRef]
- Souza, F.G.; Portes, M.F.; Silva, M.V.; Teixeira, M.M.; Furtado Júnior, M.R. Impact of sprayer drone flight height on droplet spectrum in mountainous coffee plantation. Braz. J. Agric. Environ. Eng. 2022, 26, 901–906. [Google Scholar] [CrossRef]
- Tsagkaris, A.S.; Pulkrabova, J.; Hajslova, J. Optical screening methods for pesticide residue detection in food matrices: Advances and emerging analytical trends. Foods 2021, 10, 88. [Google Scholar] [CrossRef]
- Mirghafouri, M.R.; Abbasi-Moayed, S.; Ghasemi, F.; Hormozi-Nezhad, M.R. Nanoplasmonic sensor array for the detection and discrimination of pesticide residues in Citrus fruits. Anal. Methods 2020, 12, 5877–5884. [Google Scholar] [CrossRef]
- Campos, J.; Llop, J.; Gallart, M.; García-Ruiz, F.; Gras, A.; Salcedo, R.; Gil, E. Development of canopy vigour maps using UAV for site-specific management during vineyard spraying process. Precis. Agric. 2019, 20, 1136–1156. [Google Scholar] [CrossRef]




| Classification Basis | Name | Explanations of Measures and References | Features |
|---|---|---|---|
| By spraying medium | Sprayer | Pesticide sprayers are the most important plant protection machinery at present and disperse pesticides into droplets to apply to the targets [10,11,83,84]. | Multiple types with high adaptability and wide applications but spraying chemical pesticides may cause 3R problems. |
| Duster | Pesticide dusters generate an airflow or use electrostatic charging to carry low-concentration or diluted pesticide powders to targets [10,85]. | No water required, strong diffusion ability, higher efficiency than sprayers, suitable for water shortage regions and enclosed places, but serious environmental problems may occur. | |
| Fogger | There are two types of pesticide foggers, normal-temperature foggers (like aerosol sprayers) and thermal foggers, which generally produce very fine fogging droplets for improving pest control efficiency [10,86]. | Fine droplets, strong penetration, good suspension and diffusion, suitable for enclosed spaces, but pesticides for thermal foggers must have high thermostability. | |
| Bio-pesticide sprayer | Bio-pesticide sprayers are applied to spray fragile biological pest control agents to ensure high viability [10,61,62]. | Environmentally friendly, but they are not suitable for explosive plant pests and need to ensure biological viability. | |
| By driven power source | Manual-operated | Manual-operated means include hand-pressure, pedal-operated, rocker-armed, etc. [87]. | Simple and convenient for courtyards and small fields with large inventory around the world, but there exist highly labor-intensive and operator safety risks. |
| Animal-powered | Animal-powered means include livestock-driven or horse-drawn [88]. | Applied in small quantities and gradually phased out. | |
| Electric-driven | Electric-driven means are generally battery-powered and have more potential applications in plant protection [89]. | Flexible and convenient, more potential applications with development of rechargeable batteries. | |
| Engine-driven | Engine-driven means apply combustion engines and are mostly applied currently in plant protection [84]. | Power type widely used for traditional plant protection machinery, especially for powerful sprayers. | |
| Others | Helium or hydrogen balloons used to spray pesticides were reported by China Global Television Network (CGTN). | Need to explore diverse power sources suitable for specific occasions. | |
| By carrier platform | Portable | Portable platforms include hand-held [90], backpack or knapsack [91,92], hand-push wheel-operated [93], trolley type [94] and other manual platforms. | Flexible and convenient, but is associated with high labor intensity and low efficiency and endangers operator safety. |
| Ground vehicle | Ground-mounted platforms include tractor-mounted [95], 3pt-mounted with tractor [96], trailer [97], high clearance self-propelled [84], etc. | Wide applicability with high application efficiency and extensive application practices with mature machinery. | |
| Airborne platform (aerial application) | Aviation platforms include fixed-wing aircraft [98], helicopters [99], plant protection UAVs [100], micro aircraft [101], etc. | Increasingly widespread applications, especially plant protection drones with low labor intensity, high efficiency and wide adaptability, but there is still a need to study intelligence and drift issues, etc. | |
| By function | Toward-target | Toward-target sprayers include electrostatic sprayers [102,103], profiling sprayers [104] and tunnel sprayers [105,106]. | As a whole, being in the early application stage, it is necessary to encourage promotion and more applications. |
| Anti-drift | Anti-drift sprayers include air-assisted sprayers [107], shielded sprayers [108], recycling tunnel sprayers [106], fixed spraying systems [109,110], etc. | Focused on ecological and environmental issues, need to pay special attention when developing novel anti-drift methods. | |
| Intelligent | With the development of sensors, AI and other technologies, intelligent precision sprayers [111,112], plant protection robots and spraying robots [113,114,115,116,117] are widely developed. | For novel plant protection applications, such as in unmanned agro-forestry production, need exploration research for their enormous potential. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, J.; Xu, Y. A Review: Development of Plant Protection Methods and Advances in Pesticide Application Technology in Agro-Forestry Production. Agriculture 2023, 13, 2165. https://doi.org/10.3390/agriculture13112165
Zheng J, Xu Y. A Review: Development of Plant Protection Methods and Advances in Pesticide Application Technology in Agro-Forestry Production. Agriculture. 2023; 13(11):2165. https://doi.org/10.3390/agriculture13112165
Chicago/Turabian StyleZheng, Jiaqiang, and Youlin Xu. 2023. "A Review: Development of Plant Protection Methods and Advances in Pesticide Application Technology in Agro-Forestry Production" Agriculture 13, no. 11: 2165. https://doi.org/10.3390/agriculture13112165