



Research and Design of Precision Fertilizer Application Control System Based on PSO-BP-PID Algorithm

Abstract
:1. Introduction
2. Materials and Methods
2.1. Precision Fertilization Control System Structure Composition
2.2. BP Neural Network PID Controller Design Based on Particle Swarm Optimization
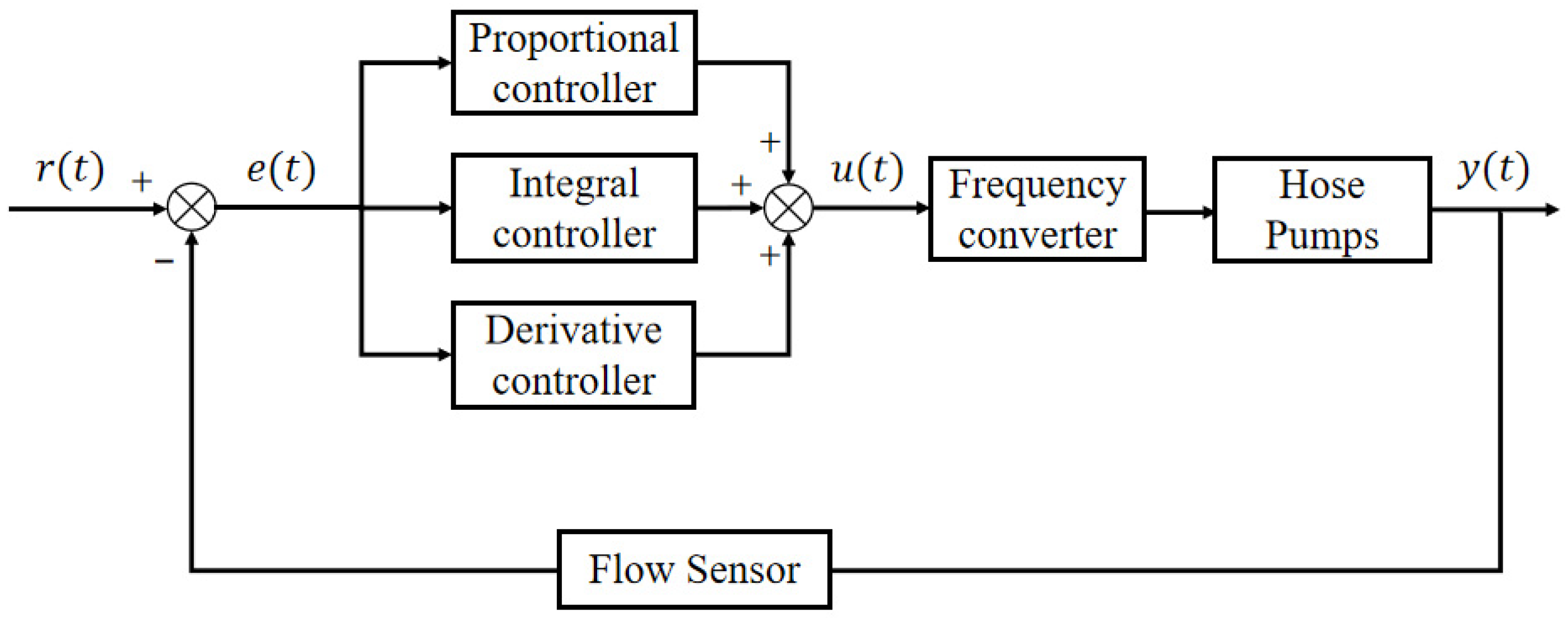
2.2.1. Conventional PID Controller Design
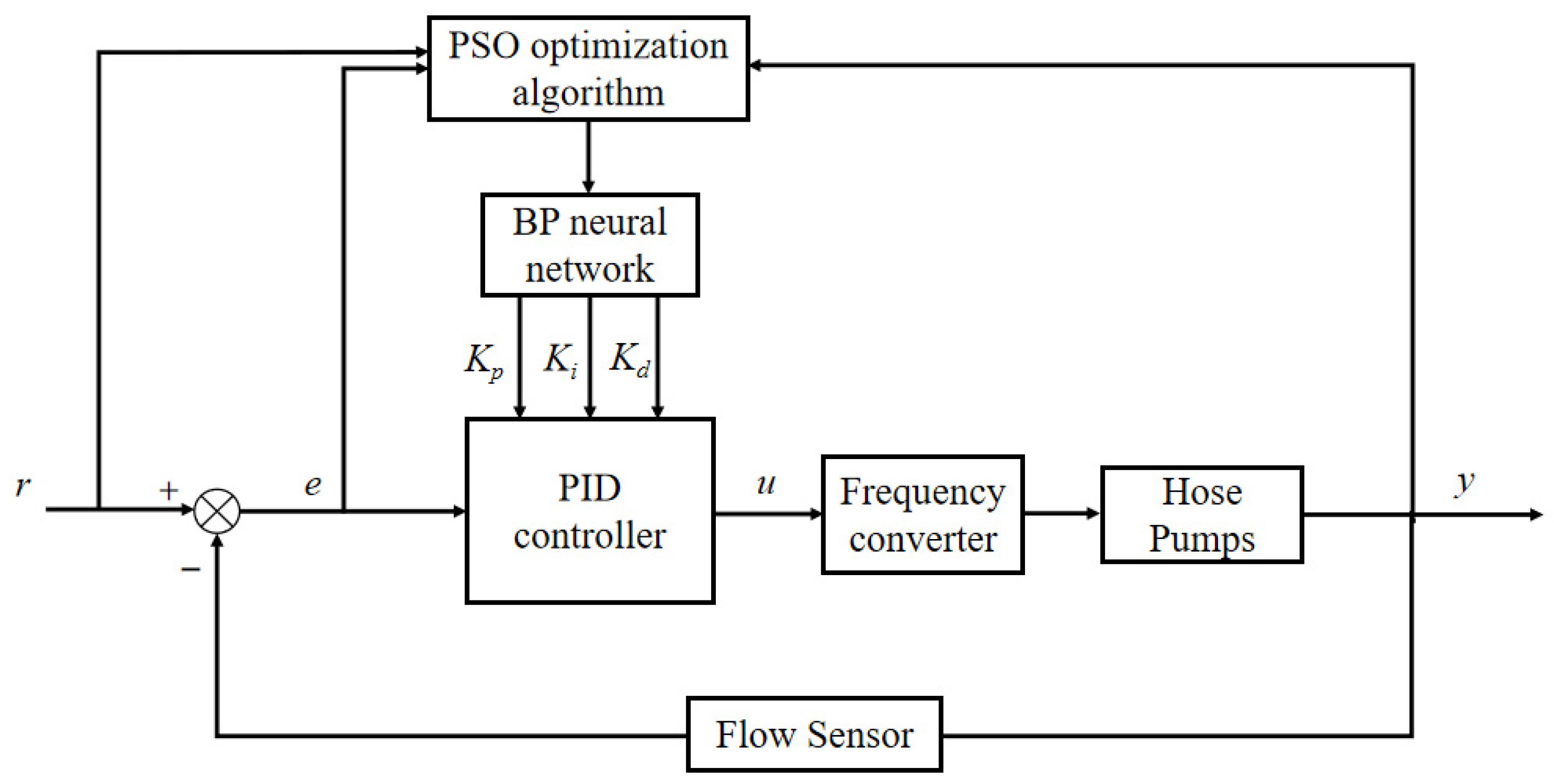
2.2.2. BP Neural Network-Based PID Controller Design
- Conventional PID controller generates control quantities through , , output from BP neural network to realize feedback control of controlled objects.
- The BP neural network provides optimal parameters for the PID controller based on the system operating state and the learning algorithm.
2.2.3. BP Neural Network PID Controller Design Based on PSO Optimization
3. Results
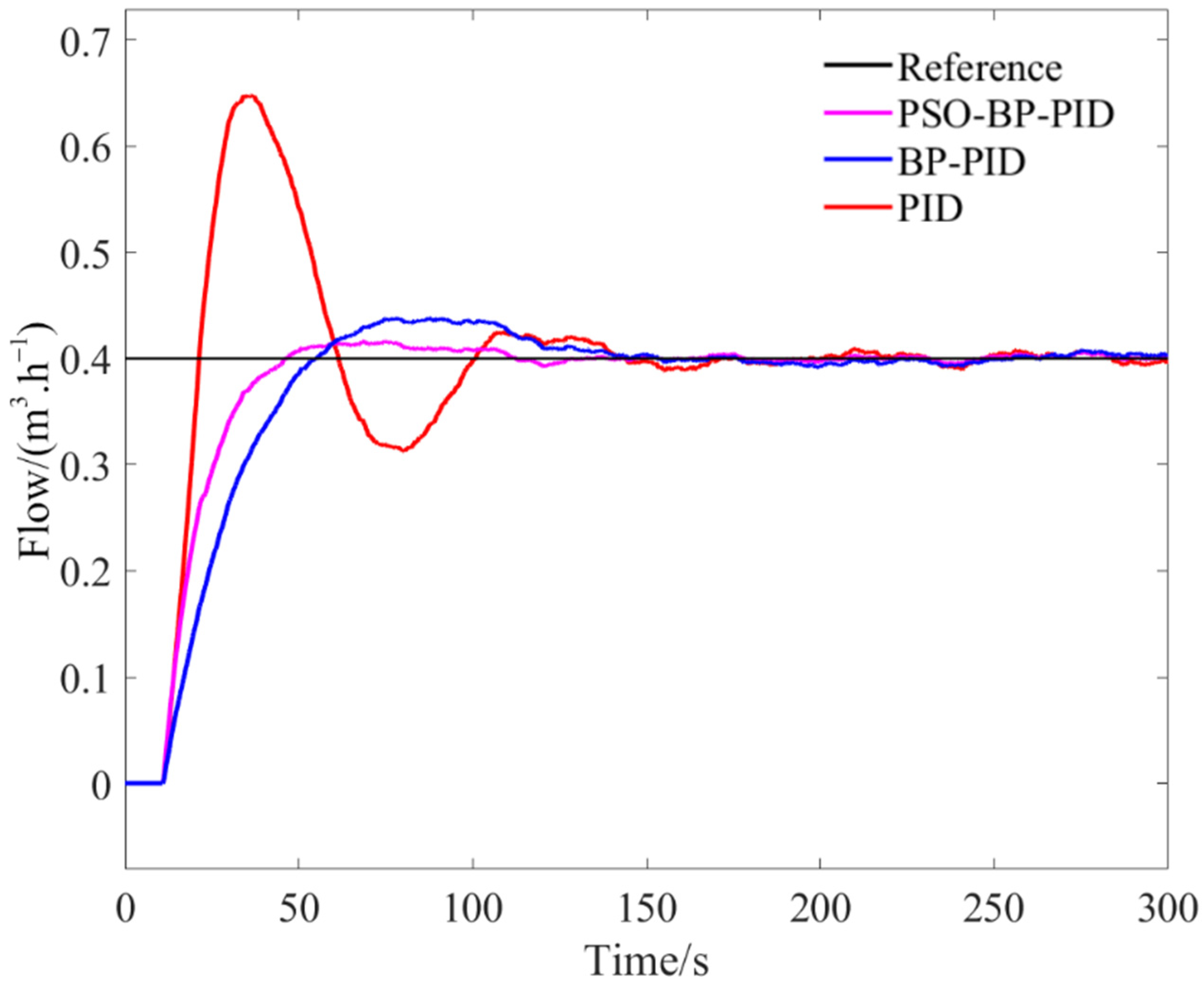
3.1. Analysis of Simulation Results
3.2. Precision Fertilizer Control System Flow Regulation Test
3.2.1. Testing Device and System Design
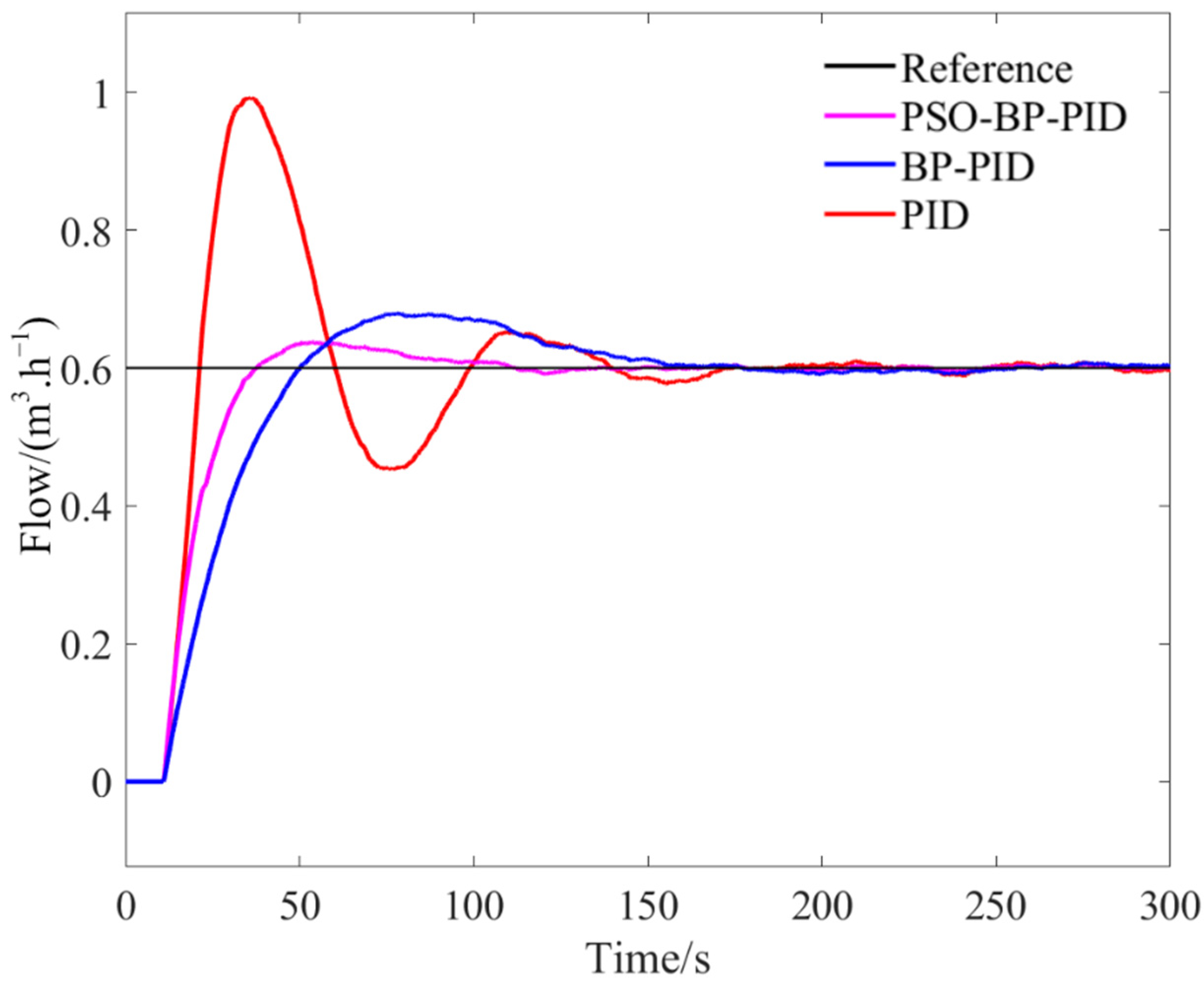
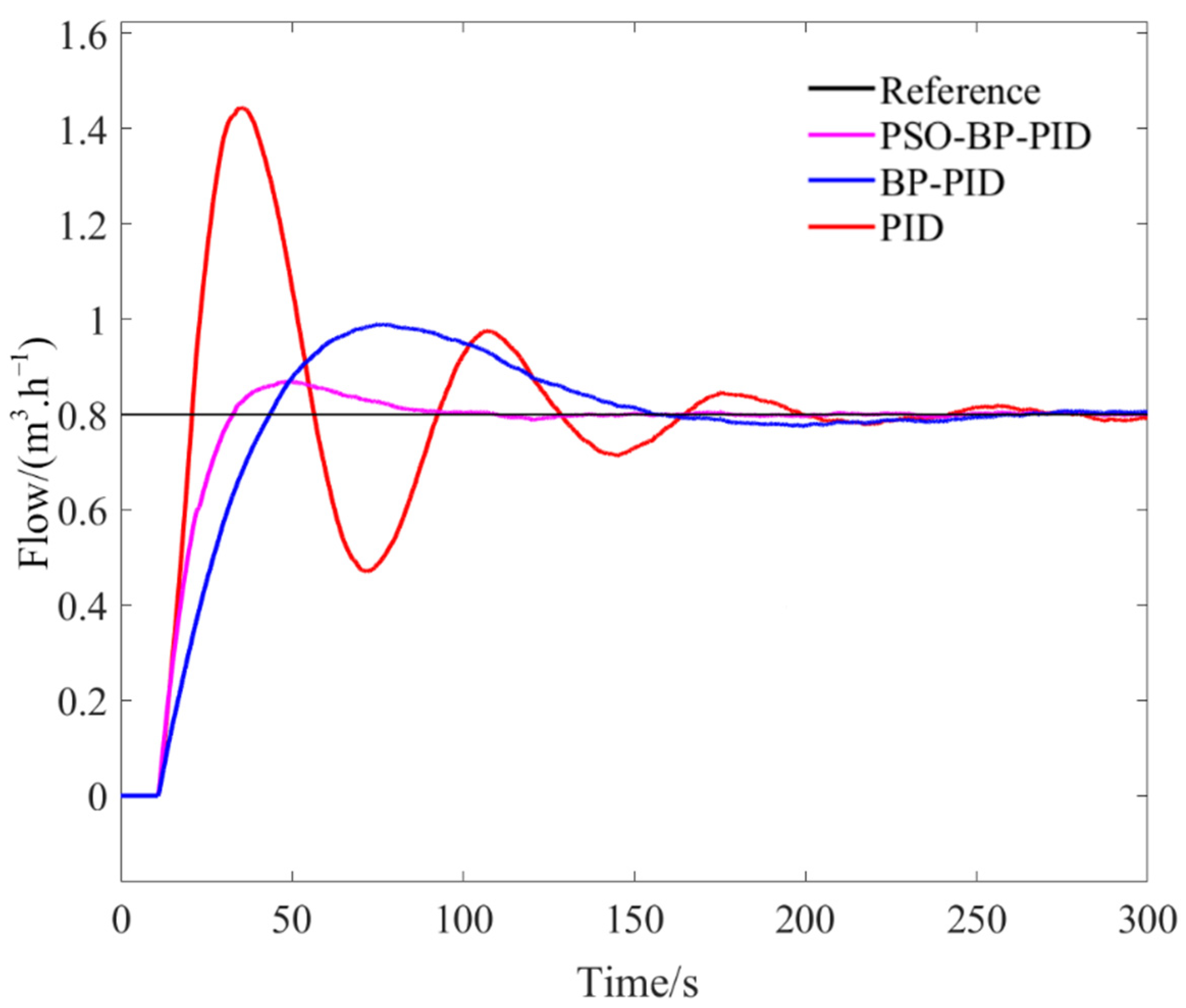
3.2.2. Analysis of Test Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Silber, A.; Xu, G.; Levkovitch, I.; Soriano, S.; Bilu, A.; Wallach, R. High fertigation frequency: The effects on uptake of nutrients, water and plant growth. Plant Soil 2003, 253, 467–477. [Google Scholar] [CrossRef]
- Wang, H.; Li, J.; Cheng, M.; Zhang, F.; Wang, X.; Fan, J.; Wu, L.; Fang, D.; Zou, H.; Xiang, Y. Optimal drip fertigation management improves yield, quality, water and nitrogen use efficiency of greenhouse cucumber. Sci. Hortic. 2019, 243, 357–366. [Google Scholar] [CrossRef]
- Xiuyun, X.; Xufeng, X.; Zelong, Z.; Bin, Z.; Shuran, S.; Zhen, L.; Tiansheng, H.; Huixian, H. Variable Rate Liquid Fertilizer Applicator for Deep-fertilization in Precision Farming Based on ZigBee Technology. IFAC-PapersOnLine 2019, 52, 43–50. [Google Scholar] [CrossRef]
- Ying-Zi, Z.; Hai-Tao, C.; Shou-Yin, H.; Wen-Yi, J.; Bin-Lin, O.; Guo-Qiang, D.; Ji-Cheng, Z. Design and Experiment of Slave Computer Control System for Applying Variable-rate Liquid Fertilizer. J. Northeast Agric. Univ. 2015, 22, 73–79. [Google Scholar] [CrossRef]
- Zou, Z.; Yu, M.; Wang, Z.; Liu, X.; Guo, Y.; Zhang, F.; Guo, N. Nonlinear Model Algorithmic Control of a pH Neutralization Process. Chin. J. Chem. Eng. 2013, 21, 395–400. [Google Scholar] [CrossRef]
- Lai, Z.; Wu, P.; Wu, D. Application of fuzzy adaptive control to a MIMO nonlinear time-delay pump-valve system. ISA Trans. 2015, 57, 254–261. [Google Scholar] [CrossRef]
- Dong, Y.; Fu, Z.; Peng, Y.; Zheng, Y.; Yan, H.; Li, X. Precision fertilization method of field crops based on the Wavelet-BP neural network in China. J. Clean. Prod. 2020, 246, 118735. [Google Scholar] [CrossRef]
- Feng, G.; Lei, S.; Gu, X.; Guo, Y.; Wang, J. Predictive control model for variable air volume terminal valve opening based on backpropagation neural network. Build. Environ. 2021, 188, 107485. [Google Scholar] [CrossRef]
- Jesus, I.S.; Barbosa, R.S. Smith-fuzzy fractional control of systems with time delay. AEU Int. J. Electron. Commun. 2017, 78, 54–63. [Google Scholar] [CrossRef]
- Bai, J.; Tian, M.; Li, J. Control System of Liquid Fertilizer Variable-Rate Fertilization Based on Beetle Antennae Search Algorithm. Processes 2022, 10, 357. [Google Scholar] [CrossRef]
- Fu, Q.; Wang, Z.; Jiang, Q. Delineating soil nutrient management zones based on fuzzy clustering optimized by PSO. Math. Comput. Model. 2010, 51, 1299–1305. [Google Scholar] [CrossRef]
- Navarro, J.L.; Díez, J.L.; Valera, A.; Valles, M. Remote Fuzzy Control of a DC Motor. IFAC Proc. Vol. 2008, 41, 13652–13658. [Google Scholar] [CrossRef]
- Estofanero, L.; Edwin, R.; Claudio, G. Predictive Controller Applied to a pH Neutralization Process. IFAC-PapersOnLine 2019, 52, 202–206. [Google Scholar] [CrossRef]
- Zhao, C.; Guo, L. Towards a theoretical foundation of PID control for uncertain nonlinear systems. Automatica 2022, 142, 110360. [Google Scholar] [CrossRef]
- Joseph, S.B.; Dada, E.G.; Abidemi, A.; Oyewola, D.O.; Khammas, B.M. Metaheuristic algorithms for PID controller parameters tuning: Review, approaches and open problems. Heliyon 2022, 8, e09399. [Google Scholar] [CrossRef]
- Chang, W.-D.; Shih, S.-P. PID controller design of nonlinear systems using an improved particle swarm optimization approach. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 3632–3639. [Google Scholar] [CrossRef]
- Tang, G.; Lei, J.; Du, H.; Yao, B.; Zhu, W.; Hu, X. Proportional-integral-derivative controller optimization by particle swarm optimization and back propagation neural network for a parallel stabilized platform in marine operations. J. Ocean Eng. Sci. 2022. [Google Scholar] [CrossRef]
- Li, H.; Zhen-Yu, Z. The application of immune genetic algorithm in main steam temperature of PID control of BP network. Phys. Procedia 2012, 24, 80–86. [Google Scholar] [CrossRef]
- Huang, G.; Yuan, X.; Shi, K.; Wu, X. A BP-PID controller-based multi-model control system for lateral stability of distributed drive electric vehicle. J. Frankl. Inst. 2019, 356, 7290–7311. [Google Scholar] [CrossRef]
- Huang, J.; He, L. Application of Improved PSO—BP Neural Network in Customer Churn Warning. Procedia Comput. Sci. 2018, 131, 1238–1246. [Google Scholar] [CrossRef]
- Ren, C.; An, N.; Wang, J.; Li, L.; Hu, B.; Shang, D. Optimal parameters selection for BP neural network based on particle swarm optimization: A case study of wind speed forecasting. Knowl. Based Syst. 2014, 56, 226–239. [Google Scholar] [CrossRef]
- Zhang, J.-R.; Zhang, J.; Lok, T.-M.; Lyu, M.R. A hybrid particle swarm optimization–back-propagation algorithm for feedforward neural network training. Appl. Math. Comput. 2007, 185, 1026–1037. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controller Type | Rise Time (s) | Peak Time (s) | Regulation Time (s) | Maximum Overshoot |
|---|---|---|---|---|
| PID | 12.41 | 13.62 | 25.07 | 58.53% |
| BP-PID | 14.69 | 16.73 | 19.68 | 20.74% |
| PSO-BP-PID | 11.97 | 12.31 | 11.77 | 3.19% |
| Controller Type | Rise Time (s) | Peak Time (s) | Regulation Time (s) | Maximum Overshoot | Root Mean Square Error |
|---|---|---|---|---|---|
| PID | 21.33 | 34.97 | 90.51 | 61.95% | 0.058 |
| BP-PID | 54.88 | 87.47 | 43.10 | 9.55% | 0.015 |
| PSO-BP-PID | 46.27 | 68.37 | 31.36 | 4.08% | 0.004 |
| Controller Type | Rise Time (s) | Peak Time (s) | Regulation Time (s) | Maximum Overshoot | Root Mean Square Error |
|---|---|---|---|---|---|
| PID | 21.22 | 36.05 | 115.86 | 65.27% | 0.084 |
| BP-PID | 50.13 | 77.97 | 112.52 | 13.15% | 0.028 |
| PSO-BP-PID | 37.53 | 53.36 | 30.85 | 6.23% | 0.014 |
| Controller Type | Rise Time (s) | Peak Time (s) | Regulation Time (s) | Maximum Overshoot | Root Mean Square Error |
|---|---|---|---|---|---|
| PID | 20.80 | 34.97 | 155.83 | 80% | 0.125 |
| BP-PID | 43.50 | 74.94 | 131.46 | 23.75% | 0.070 |
| PSO-BP-PID | 32.76 | 48.64 | 61.30 | 8.75% | 0.027 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, Z.; Zhang, L.; Wang, H.; Ma, X.; Li, H.; Zhu, F. Research and Design of Precision Fertilizer Application Control System Based on PSO-BP-PID Algorithm. Agriculture 2022, 12, 1395. https://doi.org/10.3390/agriculture12091395
Meng Z, Zhang L, Wang H, Ma X, Li H, Zhu F. Research and Design of Precision Fertilizer Application Control System Based on PSO-BP-PID Algorithm. Agriculture. 2022; 12(9):1395. https://doi.org/10.3390/agriculture12091395
Chicago/Turabian StyleMeng, Zihao, Lixin Zhang, Huan Wang, Xiao Ma, He Li, and Fenglei Zhu. 2022. "Research and Design of Precision Fertilizer Application Control System Based on PSO-BP-PID Algorithm" Agriculture 12, no. 9: 1395. https://doi.org/10.3390/agriculture12091395