1. Introduction
Tea is one of the main cash crops in China [
1]. The global tea cultivation area is 4.89 million hectares [
2]. Most premium teas are not harvested by dedicated mechanical equipment but by manual picking. The low efficiency of manual harvesting has hindered the development of the tea industry [
3]. When machinery is used to harvest fine tea, the non-selective picking method can cause considerable damage and breakage of tea buds. Most mechanical tea-bud pickers are discontinuous and rigid shear pickers that can damage and alter tea quality [
4].
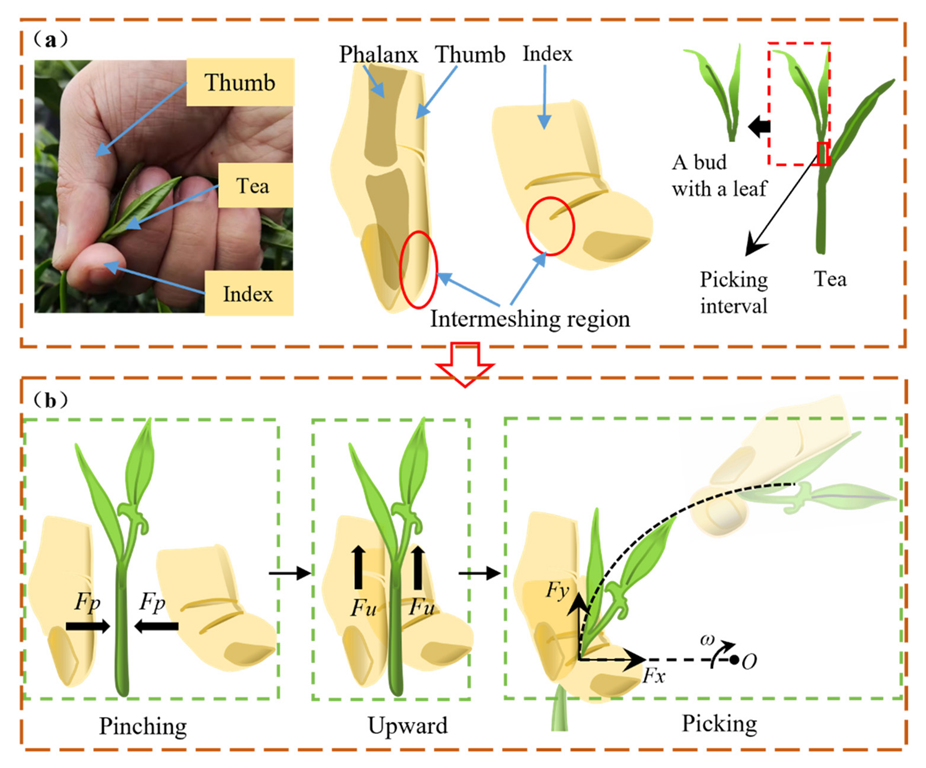
Manually harvested tea is high-quality tea. However, studies have not investigated the harvesting mechanism in depth by taking into consideration the finger flexibility forces, stalk structure, and interactions between multiple forces during manual picking. There is flexible contact between the fingers and shoots during manual picking. Additionally, no adverse chemical changes occur at the bud breakage point upon contact with fingers. Here, we studied a low-damage mechanical harvesting technique for tea buds, based on the imitation ability of artificial flexibility forces and mechanisms for low-damage tea picking. Bionic picking can reduce the damage from mechanical tea picking and thereby considerably improve the picking efficiency.
Tea buds are easily damaged by external forces, and the mechanical properties of different parts of tea stalks vary considerably. Moreover, the bending resistance and shear strength of tea stalks significantly correlate with the structures of the xylem and pith [
5,
6]. Further, Du et al. [
7] combined grey relations with multiple linear regression to identify the correlations between the cellulose content, flexural strength, shear strength, stem diameter, and moment of inertia of tea stalks. In turn, Jia et al. [
8] observed a normal distribution of the tea stalk pull-off force. Meanwhile, Hao [
9] determined the pull-off and pinch-off forces of tea shoots, and, using hyperspectral techniques, Du et al. [
10] observed that the neutral and acid detergent fiber contents of tea stalks directly affected the magnitude of the shear strength. Furthermore, the average modulus of elasticity, compression, and shear of the fourth node stalk of new tea tree tips were calculated as 31.81, 10.12, and 9.19 MPa, respectively [
11]. As for the control of flexible forces during picking, Miao and Zheng [
12] established a flexible-force control algorithm that can provide low-damage picking for different fruit types. In turn, Zou et al. [
13] established a rheological constitutive equation for leafy greens, analyzed the force–displacement relationship, and obtained a low-damage flexible clamping model for leafy greens. Finally, Hou et al. [
14] established a link between the soft contact mechanical index of the finger and the mechanical structure of the finger tissue to obtain a bionic flexible-finger mechanical model.
Therefore, here, we studied the mechanics of manual harvesting of premium tea buds to identify the reasons for the high quality that characterizes hand-picked buds. The principles of bionic low-damage picking mechanics were determined by analyzing the finger flexibility forces, tea stalk mechanical properties (flexible clamping force, compression force, pull-off force, bending force), and tea-bud picking paths. Multiple mechanical modes for individual loading modes were designed for the experiments using tea stalks. On this basis, the finger flexibility forces, tender tip-bending forces, clamping forces, and breakage forces were analyzed. Mechanical low-damage picking mechanisms were obtained by analyzing the manual picking path of tea buds under a coupled loading mode.
3. Results and Discussion
During the picking process, the fingers exert compressive, frictional, bending, and pulling forces on the tea stalks. However, the breaking and bending forces required vary according to the location of the tea plantation. Therefore, the forces acting on the shoot tips, either individually or in combination, should be analyzed to explore the mechanisms underlying the breakage of tea buds upon hand-picking.
3.1. Microstructural Damage to Stalk Fracture
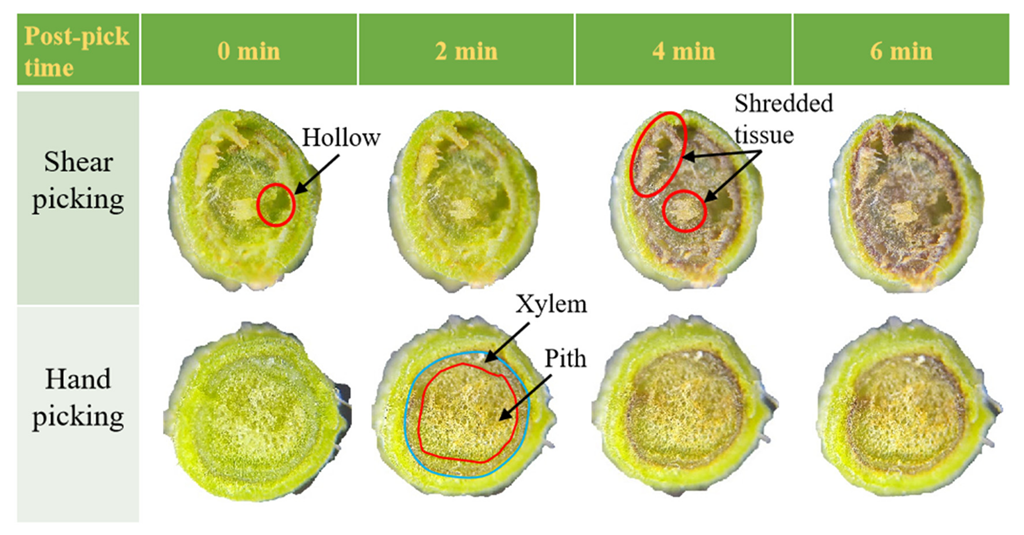
The wounds produced by blade-shear picking and hand-picking of tea stalks are shown in
Figure 6. Under blade-shear picking, the blades squeezed the stalks, which resulted in an oval-shaped wound. The fracture interface was uneven and showed numerous burrs. The stalk tissue was torn at the point of fracture, and the interior of the fracture was also damaged through the crushing action, such that cavities were observed in the wood pith. After shear picking, the fractured sections and internally damaged tissues were extensively oxidized. Oxidation produces substances that darken the tea [
18]. Blade-shear picking disrupts the tissues within the tea stalks, and such rupturing produces an excess tissue fluid that further increases the oxidation rate. In contrast, hand picking involves lifting off the buds by squeezing the stalks with the fingers, whereby the resulting fracture section is flat and burr-free. After equal oxidation periods, the oxidized area in a wound produced by hand picking was considerably smaller than that in a wound caused by blade-shear picking. The bud tissues showed a brownish-red color after the wound was oxidized by ambient air, particularly in the xylem and wood pith.
3.2. Analysis of Flexible Clamping Force
The structure of human fingers predominantly comprises skin, subcutaneous tissue, and phalanges [
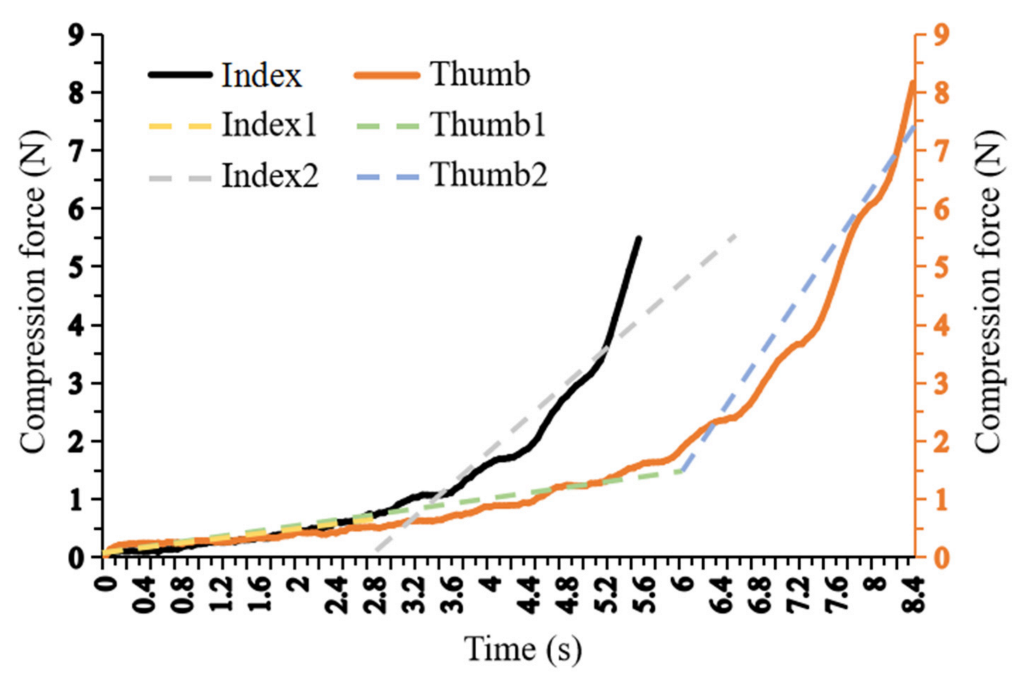
14]. When fingers engage the tea, the skin and subcutaneous tissue form indentations under the pressure exerted by the tea stalks. The depressed space formed by the thumb and forefinger then wraps around the tea stalk. The finger bones are considerably denser than the subcutaneous tissue. Therefore, when the fingers pinch the tea stalks, the flexible subcutaneous tissue creates a cushion, which prevents damage to the tea. Further, when fingers are wrapped around the tea stalk, the finger bones prevent the subcutaneous tissue from sinking. The grip of the fingers on the tea stalk then suddenly increases. The forces on the thumb and forefinger engagement area when in contact with the tea stalk are shown in
Figure 7. The forces on the two intermeshing regions vary non-linearly with time. The contact force from the index finger slowly increased from 0 to 2.8 s, followed by a rapid increase in the contact force in the 2.8–5.6 s band. Meanwhile, the compression force from the thumb slowly increased from 0 to 6 s, with a rapid increase in the compression force in the 6–8.5 s band. These findings are consistent with those of Dzidek et al. [
19]. However, Dzidek’s study was conducted on the ventral region of the finger, where the pressure was 1.2 N when the ventral deformation was 1.46 mm. The previous work did not specify the force parameters of the thumb tip and the joint between the first and second joints of the index finger.
When the index finger intermeshing region was deformed by approximately 1.6 mm, the contact force was approximately 1.5 N. At this point, the contact force from the thumb was approximately 0.8 N, which was lower because the subcutaneous tissue in the intermeshing region from the thumb is thicker than that of the index finger. Specifically, when the rod is loaded and the thumb intermeshing region is squeezed, the buffer zone of the thumb is larger than that of the index finger. Based on the mechanical variation trend, the intermeshing of the thumb and the index finger can be simplified as two separate linear elastic variations of flexible materials. As shown in
Figure 7, the fitted curves for the anterior and posterior segments of the thumb were named thumb1 and thumb2, respectively. The thumb deformation was within 0–2.4 mm, and its elasticity coefficient was 783 N m
−1 for thumb1 and the deformation interval was within 2.4–3.4 mm, with an elasticity coefficient of 6632 N m
−1 for thumb2. The fitted curves for the anterior and posterior segments of the index finger were named index1 and index2, respectively. The index finger had an elasticity coefficient of 658 N m
−1 in the deformation interval 0–1.1 mm. The deformation interval was within 1.1–2.2 mm when the elasticity coefficient was 3729 N m
−1. The area of the engagement zone was 143 mm
2.
3.3. Extrusion Properties at Different Positions of the Stalk Level
During tea picking, the clamping force is always applied to the tea stalk. The intensity of the clamping force directly affects the extent of the possible damage to the tea [
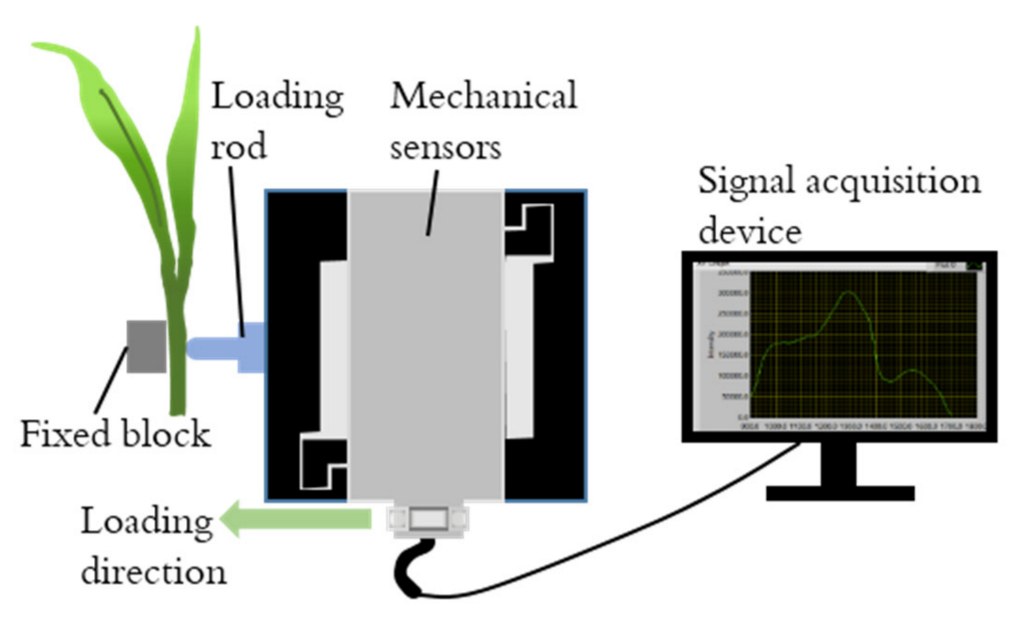
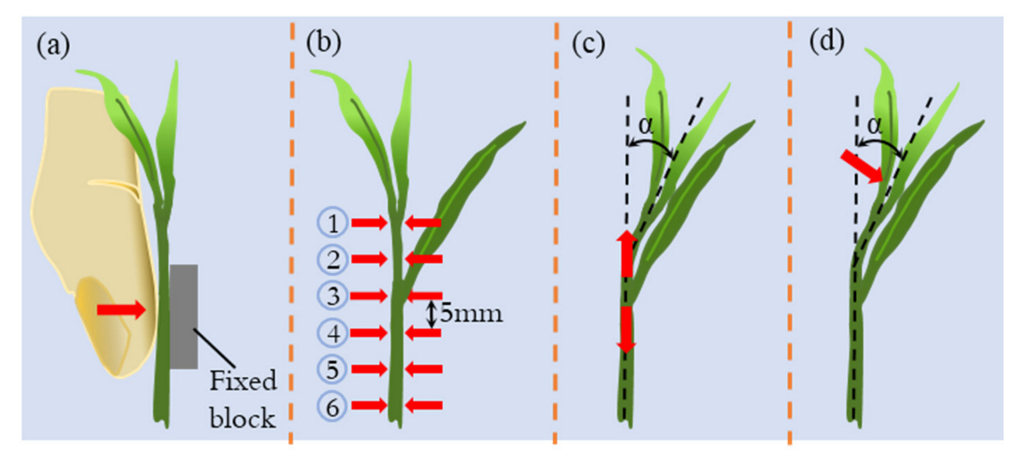
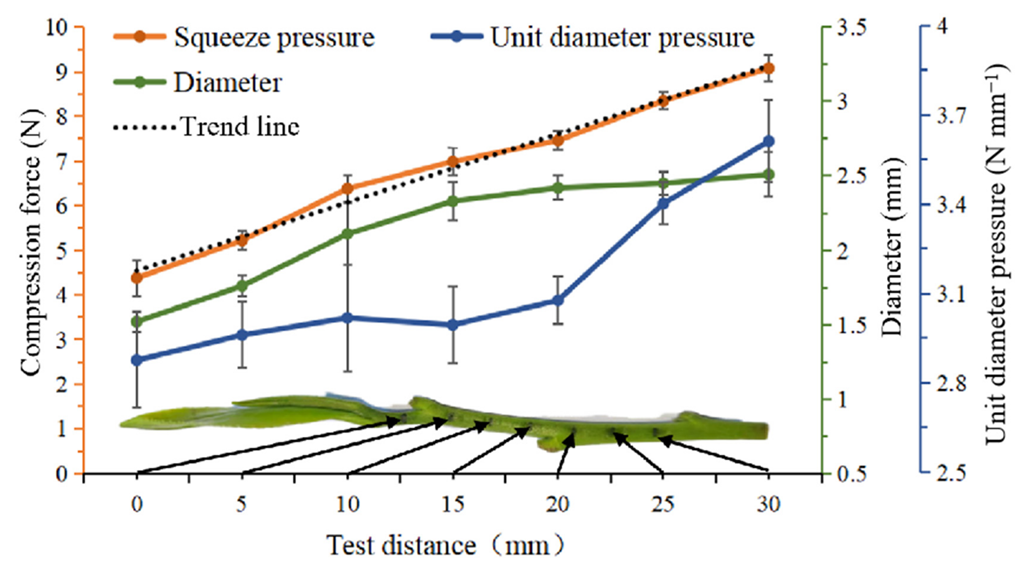
20]. In mode b, the tea stalks were placed on the side of the fixing block. The probe was loaded to squeeze the stalk from the other side at an even speed. The data from 20 experiments were considered for each group, and the average value was used to represent the experimental results. Seven experimental points on the tea stalks were selected for these measurements, starting at the middle of the BIS, with other points 5 mm apart along the stem and down the stalk. The loading forces required to produce plastic deformation at different positions in the horizontal length of the tea stalk are shown in
Figure 8. The width and length of the loading block was 1 and 10 mm, respectively, and the indentation area formed on the stalk was 1 ± 0.2 mm
2.
As
Figure 8 shows, the diameter of the tea stalk gradually increased from the tip of the bud downwards. As the diameter increased, the forces producing deformation in the stalk gradually increased and the loading force tended to be linearly distributed. The average maximum stalk deformation force was 4.38 N for BIS, 6.2 N for OTS, and 8.3 N for STS. Owing to the different diameters for the same parts of tea stalks during growth, the deformation forces per unit diameter at different positions along the stalk were investigated. As the diameter increased, the maximum deformation force per unit diameter tended to slowly increase, then level off, and then rapidly increase. Further, the tea stalk diameter underwent substantial mutation from BIS to OTS but not from OTS to STS.
The increase in the stalk deformation force with increasing diameter was attributed to the changes in the structure of the stalk tissue. This was in line with the findings of Cao et al. [
21]. Previously, Cao’s study showed a linear correlation between the stalk cross-sectional area and shear force. The shear force was 0.6 N when the cross-sectional area of the tea stalk was 1.8 mm
2. The results of this study showed a linear correlation between the stalk cross-sectional area and squeezing pressure. The squeezing pressure was 4.4 N for a tea stalk cross-sectional area of 1.8 mm
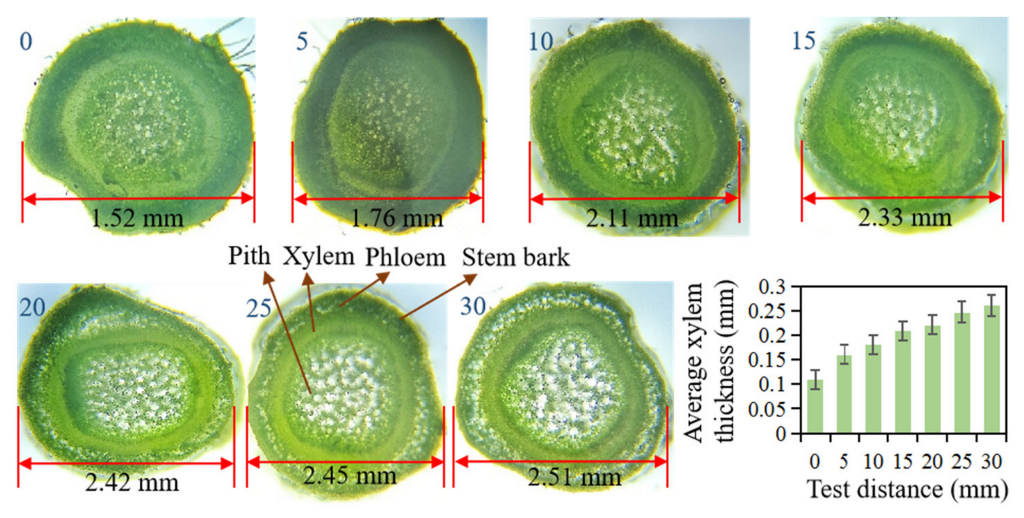
2. However, the previous research studied the shear force of the stalk and did not analyze the squeezing force between the fingers and the stalk. As shown in
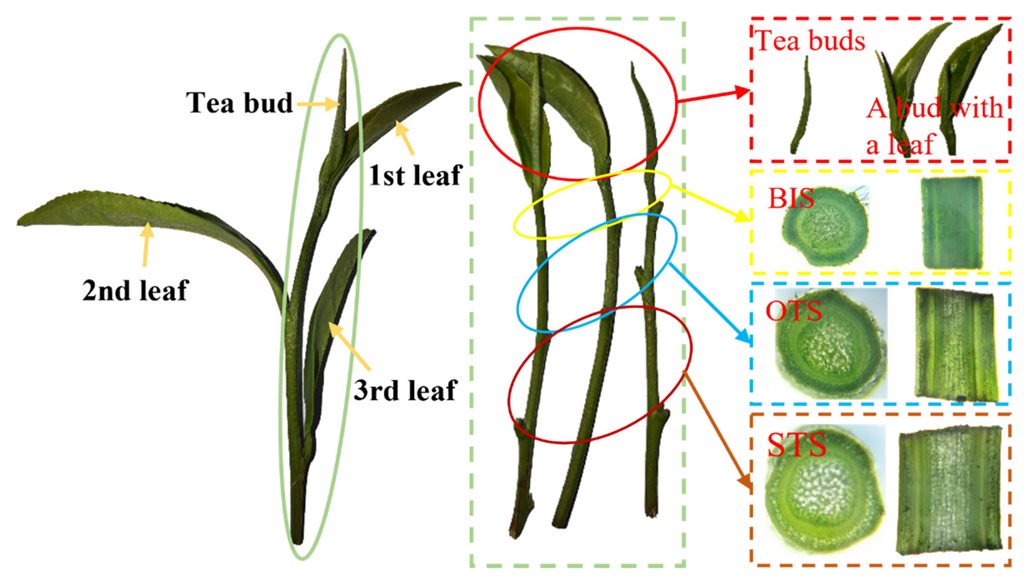
Figure 9, the stalk cross-section comprises the stalk bark, bast, xylem, and wood pith. The cross-sectional organization of the stalks was relatively similar at the stalk lengths of 0, 5, 10, and 15 mm. In contrast, the bast and medullary fibers of the stalk became more transparent, and the xylem diameter increased considerably at 20, 25, and 30 mm. The xylem in the tea stalks increased with increasing diameter. The cells of the stalk bast and wood pith showed progressive fibrillation from position 0 to 30 on the stalk. The xylem is the main structure responsible for maintaining the stalk in an upright position. As the stalk diameter increased, the bast of the stalk became progressively fibrous. This change was consistent with the trend of the deformation forces generated by the stalk. Therefore, the intensity of the deformation force generated by the stalk is directly related to the degree of fibrillation of the bast.
3.4. Pull-off Force at Different Positions on the Stalk
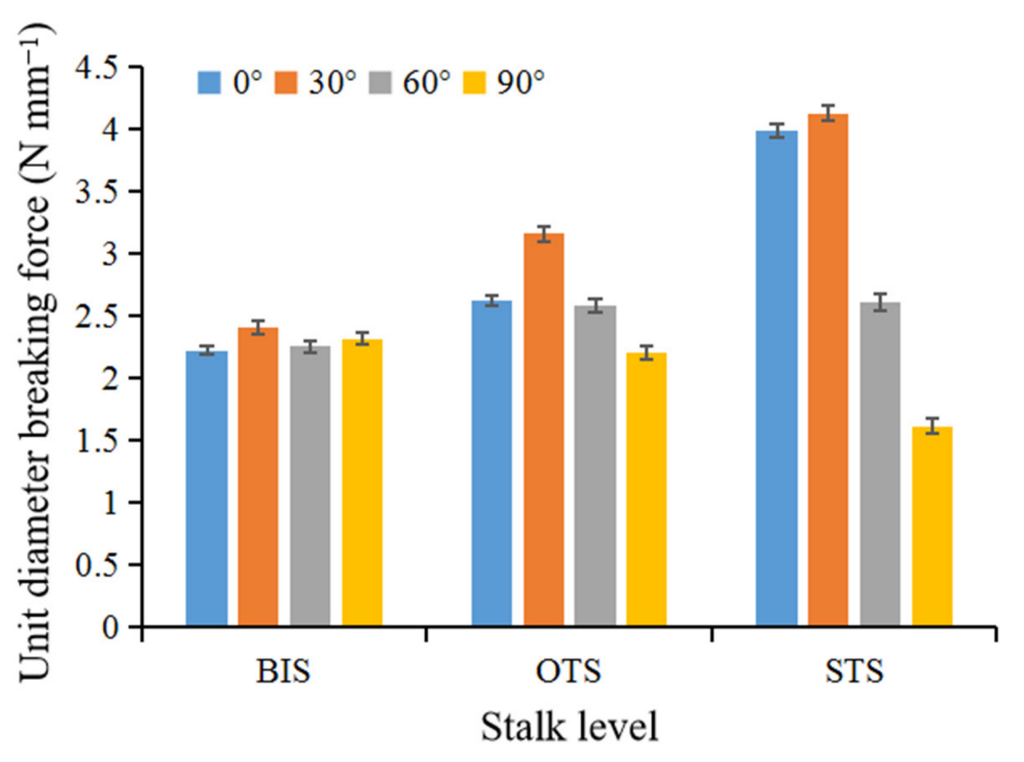
When picking tea buds by hand, the fingers first bend the shoots at a certain angle and then the fingers lift off the buds. It is crucial to identify the difference in the pull-off forces between the bud break point and the rest of the stalk under bending to develop efficient bionic harvesting. The tea stalk diameter varies in size, whereby the pull-off force cannot be directly compared. Therefore, the pull-off force per unit diameter was adopted as a measurement. The pull-off force per unit diameter was evaluated separately for the BIS, OTS, and STS of the stalk, and the results are shown in
Figure 10. For stalk bending angles between 0° and 90° in the BIS range, the stalk pull-off force per unit diameter ranged within 2.2–2.4 N. In turn, the pull-off force per unit diameter of the stalk at OTS ranged from 2.2 to 3.1 N, and that at STS ranged from 1.6 to 4.1 N. In all three cases, the stalk pull-off force per unit diameter increased and then decreased under the action of different bending angles. Specifically, as the bending angle increased from 0° to 30°, the partial force required to pull off the stalk increased, resulting in a larger combined force. On the other hand, the hardness of the stalk decreased when the bending angle exceeded 30°. The stalk xylem vessels became brittle and broke under the bending action and, consequently, the pull-off force was reduced.
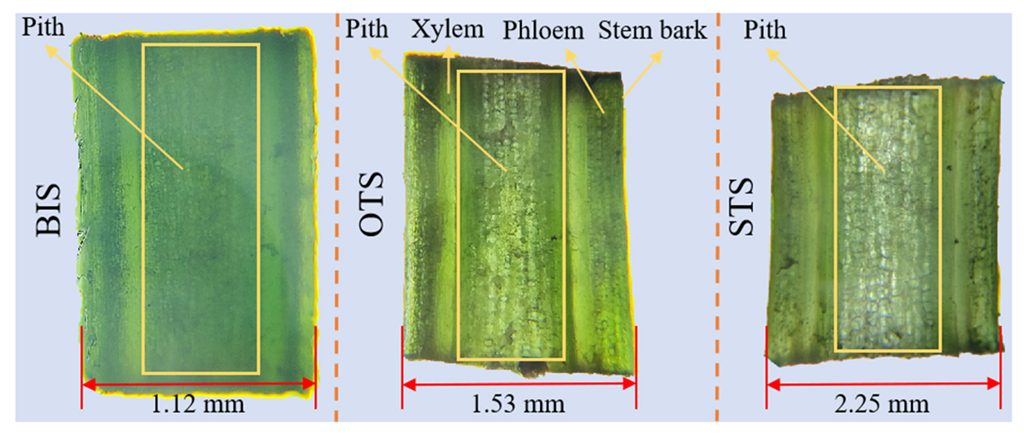
When the stalk was subjected to axial tension, the breaking point occurred at the end of clamping. The cross-section of the point of fracture at BIS was smooth and burr-free, whereas that at OTS showed few filamentous fibers, and that at STS showed abundant filamentous fibers. The breakage of all tea stalks was a brittle break. This was attributed to the high water content of the stalks and the fact that they were not yet fully lignified. The axial cross-sectional organization of tea stalks is shown in
Figure 11. The fibrous tissue in the stalk gradually increased with increasing diameter. The small variation range in the pull-off force at different stalk angles at BIS was attributed to the similarity of the organization of the various regions of the stalk in that section. The bending angle showed a lower effect on the pull-off force of the stalk at BIS. Furthermore, owing to its smaller xylem and diameter, BIS presented a lower pull-off force. The stalk bark, bast, xylem, and wood pith were clearly distinguished in the axial cross-sectional view of the stalk at OTS. However, the cellular tissue at this point was not yet mature compared with the STS stem tissue. Therefore, the mechanical trend of OTS was in line with that of STS. These findings were consistent with those of Huang et al. [
22]. Previous studies by Hang showed that the average values of shear force at BIS and OTS were 0.97 and 1.2 N, respectively. The results of this study showed that the mean values of the pull-off forces at BIS and OTS were 2.2 and 2.6 N, respectively, at 0 deg. In this paper, the bending force, pull-off forces, and stalk structure were analyzed simultaneously. At OTS and STS, the stalks showed a gradual reduction in the stalk pull-off force at 30–90°. Because of the increase in diameter and xylem tissue, the stalk was more likely to break under bending action, thereby reducing the pull-off force.
3.5. Forces Required for Bending at Different Stalk Positions
At the final stage during tea-bud picking, stalks should be bent at an angle that allows tea buds to be quickly picked [
23]. Stalks should be bent at the BIS during picking, while remaining upright at other positions. There are diameter differences for the same stalk position, whereby the bending forces cannot be directly compared. Therefore, we selected tea samples with the largest diameter at BIS and the smallest diameter at OTS and STS for the experiments. To analyze the forces required to bend the different parts of the tea stalk, the experiments were conducted at different positions along the tea stalks, as shown in
Figure 12.
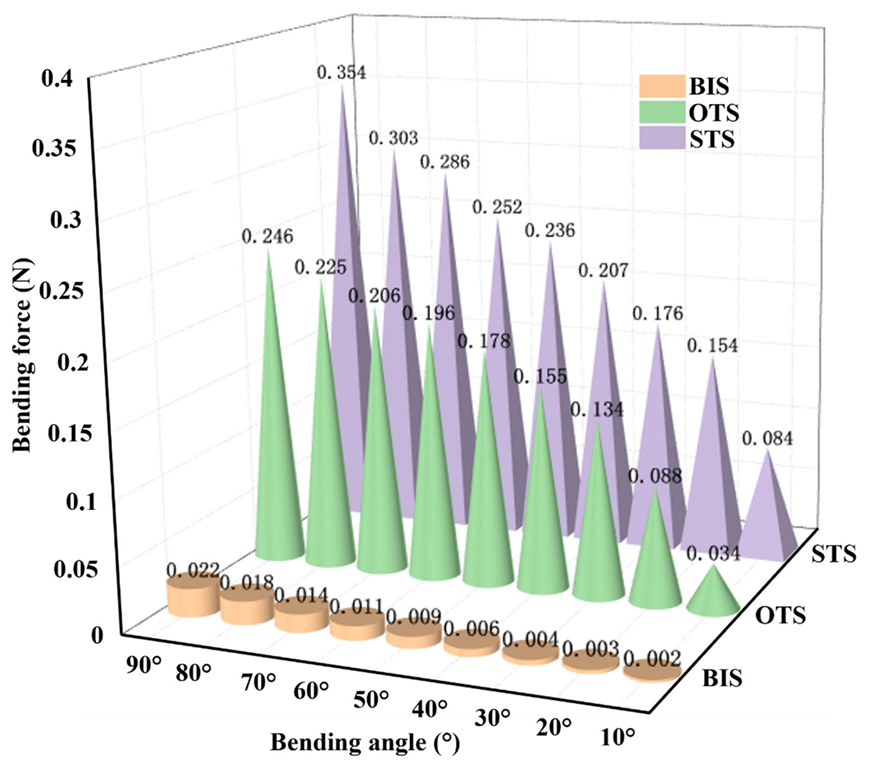
Consistent with findings reported by Wu et al. [
24], the bending force required by the tea stalk gradually increased as the bending angle increased, in the experiments described herein. Previously, Wu’s study showed decreasing values of the stem stiffness from the bottom to the top. In this paper, the bending force of the stalk was measured at different positions. The test results show that the stiffness of the stalk decreases slowly from the bottom to the top and then decreases rapidly. Further, the bending resistance of the stalks was most pronounced at STS, and, because STS showed the largest xylem vessels, its potential for the stalk was the greatest and increased with an increasing angle. Conversely, the stalk showed the least bending resistance at BIS, which indicated a greater toughness. The tissue structure of the stalk at BIS can remain intact even under the effects of large angular bending. Indeed, bending forces of 0.022, 0.246, and 0.354 N were required at 90° for BIS, OTS, and STS, respectively. Furthermore, the bending force of BIS was considerably lower than those of OTS or STS owing to the small diameter of BIS and greater hardness of the stalk tissue in this case.
3.6. Picking Mechanics Program
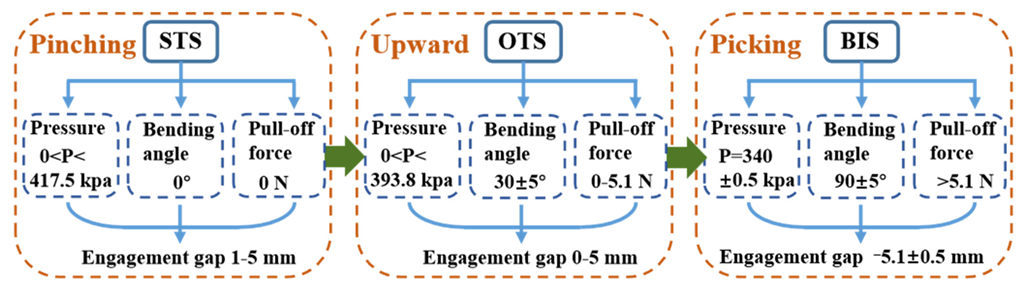
The pinching, upward pulling, and picking of bionic harvesting was determined based on the characteristics of manual picking. Multiple forces act on tea stalks during tea bud harvesting, and the main ones are clamping force, tension, and bending force. A flow diagram of the load applied to the stalk during the three stages of manual picking is shown in
Figure 13. The engagement gap is the distance between the contact surfaces of the index finger and the thumb. Contact without extrusion is represented by a positive value, whereas deformation extrusion is represented a negative value. The fingers guide the stalk into the engagement zone at the pinching stage, during which a clamping force is primarily used. The range of pressure action at STS was obtained from the finger engagement zone pressures, which have been previously measured as 0 <
p < 417.5 kPa. When engaged, old leaves fill the engagement gap and fluctuate at 1–5 mm in the engagement gap.
The fingers move upwards while bending to guide the stalk behind them into the bend. The range of pressure on the stalk at this point was 0 < p < 393.8 kPa, and the stalks were bent at an angle of 30 ± 5°. The finger tension was less than the breaking tension of the stalk; thus, it was <5.1 N. During the picking stage, the fingers pinch the stalk, and at BIS, the stalk can act on a range of pressures of 340 ± 0.5 kPa. A higher bending angle of the stalk improved the picking. However, the bending angle of the wrist is limited; therefore, the bending angle at BIS was 90 ± 5°. At this point, the tension acting on the stalk is greater than the breaking tension of the stalk (i.e., tension is greater than 4.38 N). At this point, the fingers must squeeze the stalk to create a greater frictional force to pull it off. The engagement gap was measured as −5.1 ± 0.5 mm.
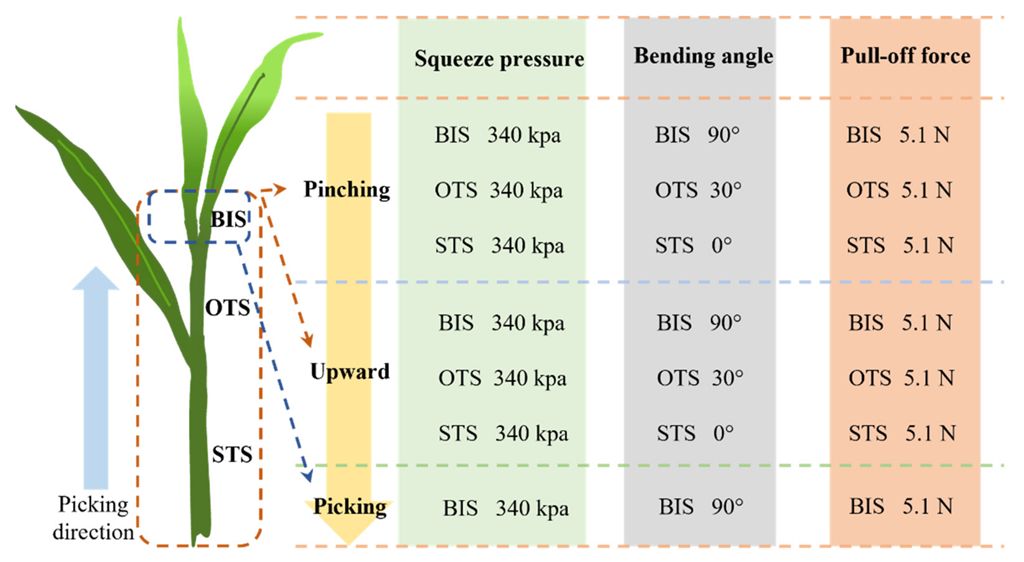
During manual picking, the fingers can be used to sense the gripping force and the shape of the stalks in real time. The strength and direction are adjusted in real time depending on the stalk position. As bionic picking simulates manual picking, a flow chart of tea bud bionic harvesting mechanics (
Figure 14) based on the manual harvesting process was drawn. Bionic picking starts by clamping the tea plant on the lower part of the stalk and then moving upwards through the STS, OTS, and then BIS. To ensure that the stalks are not damaged by clamping, the maximum pressure that tea stalks can withstand was determined based on the maximum pressure at the most vulnerable point. This maximum clamping pressure was determined as 340 kPa throughout the picking process.
Tea buds should be picked at BIS, and OTS and STS should remain intact. Greater bending angles of BIS led to better picking, which is consistent with the principle of manual picking. The OTS and STS bending angles showed the highest pull-off force at 30°; therefore, a BIS-bend angle of 90° and OTS- and STS-bend angles of 30° were considered the most suitable for tea picking. Based on the bending force experiment (
Figure 12), a bending force of 0.134 N was determined.
During the picking process, greater pulling forces loaded on the tea buds can lead to more efficient bud harvest. However, excessive tension can cause the tea stalks to break at STS or OTS. Therefore, it is important to ensure that the buds are pulled off without breaking other points of the stalk. The critical value of the tensile force should be less than that required to break the stalk at OTS. Based on the tensile tests, a pull-off force of 5.1 N was determined.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













