
Design and Experiment of Horizontal Transplanter for Sweet Potato Seedlings

Abstract
:1. Introduction
2. Materials and Methods
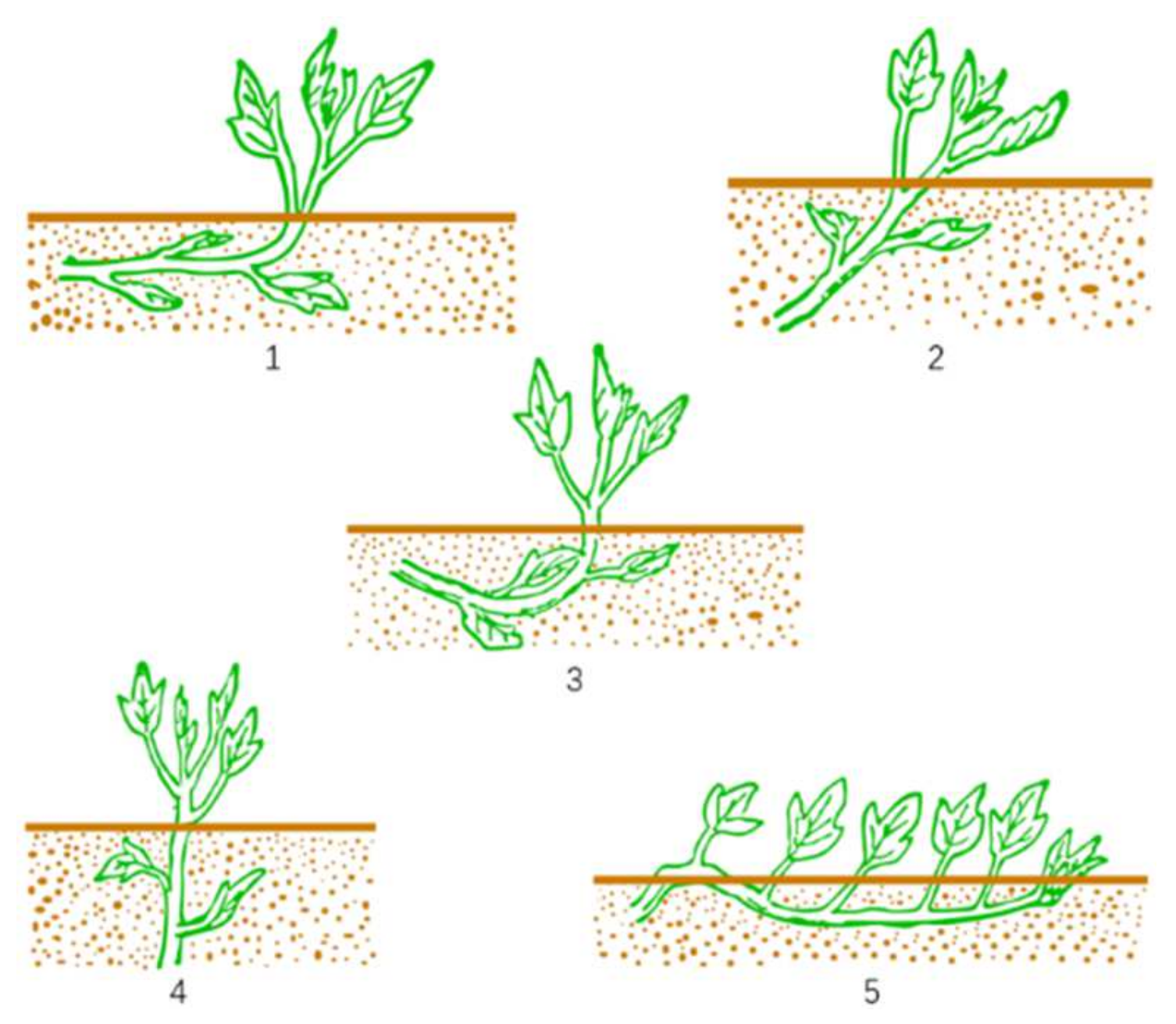
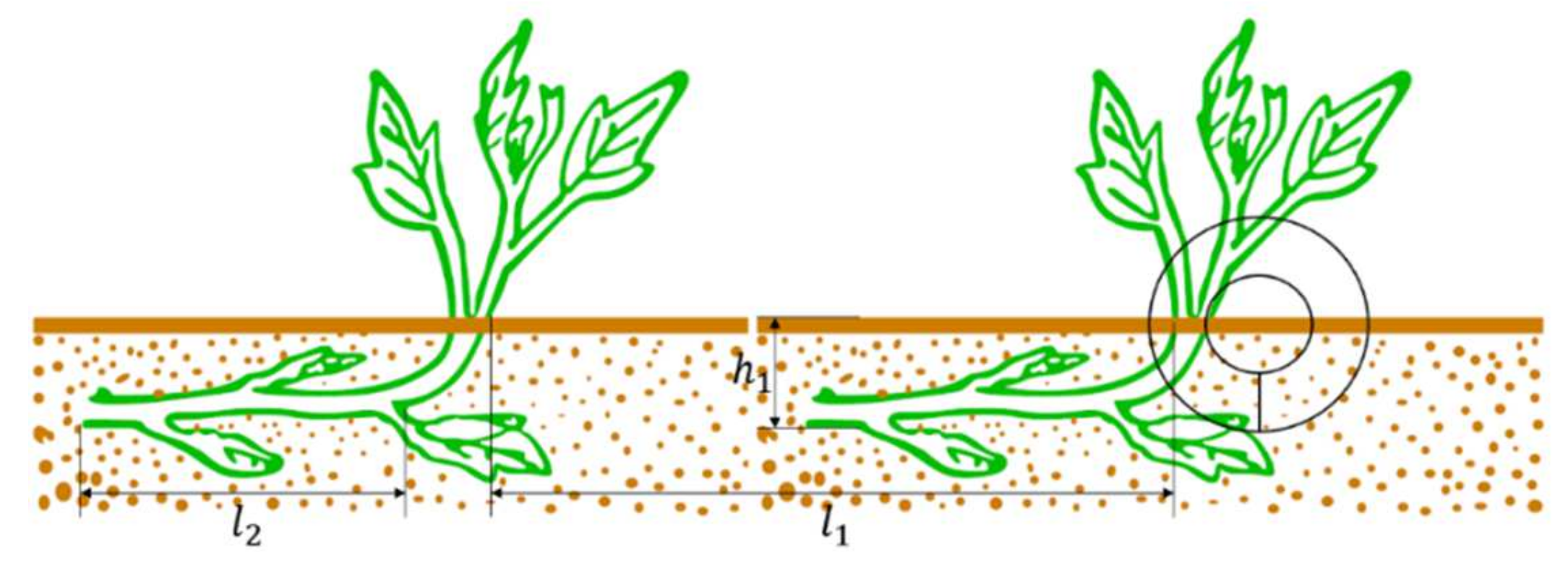
2.1. Planting Agronomic Requirements
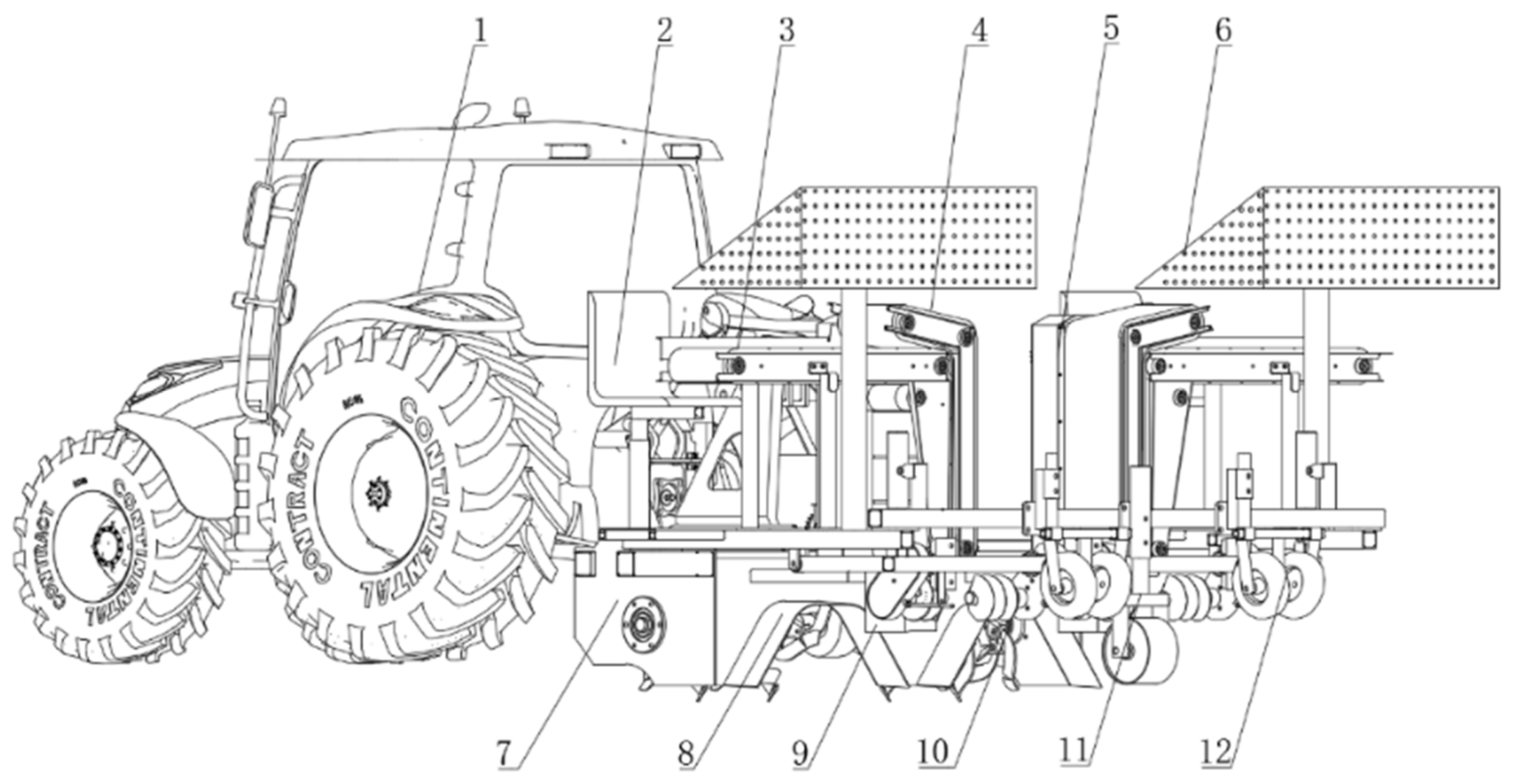
2.2. Design of Transplanter
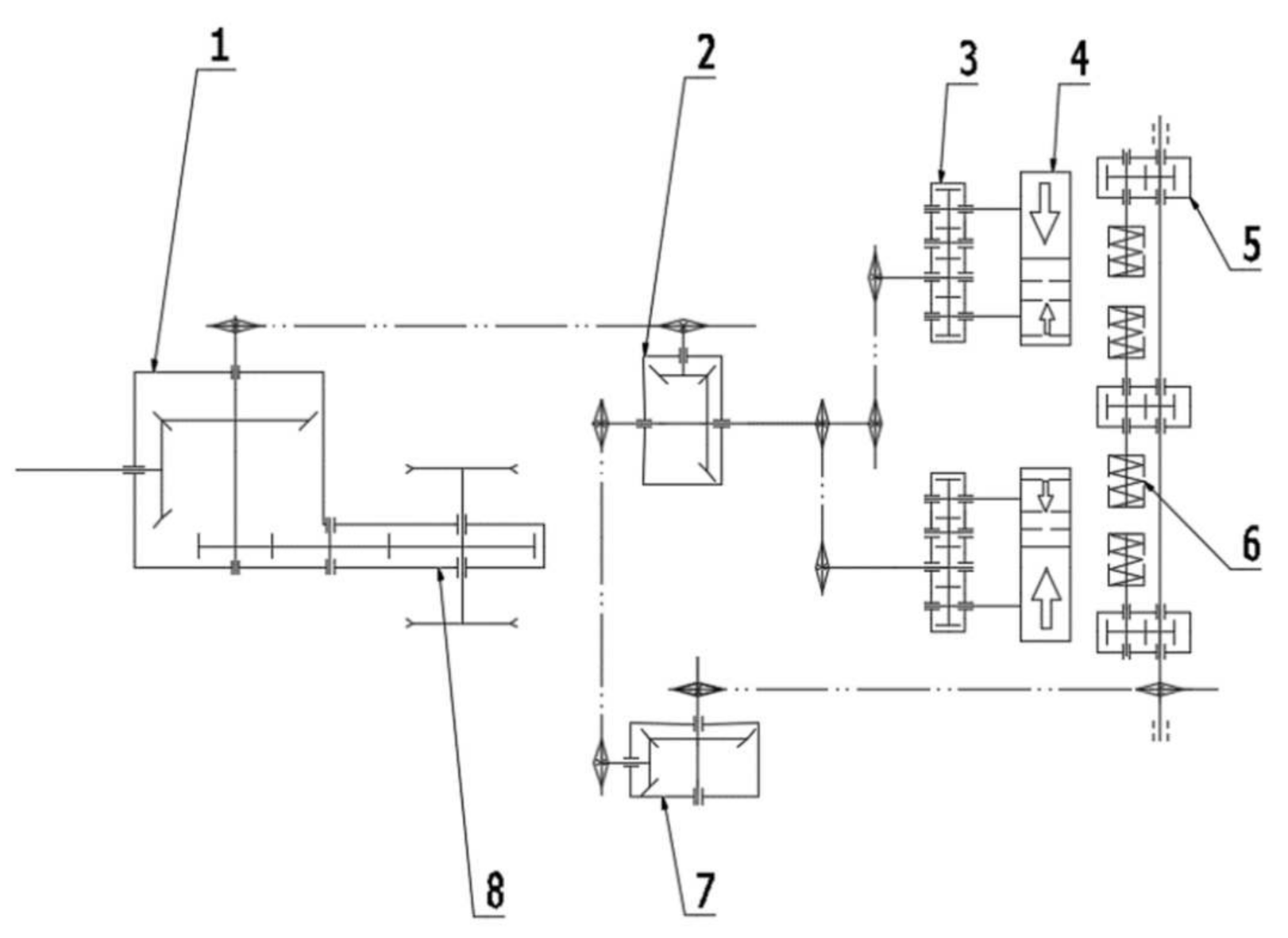
2.3. Working Principle
2.4. Main Technical Parameters
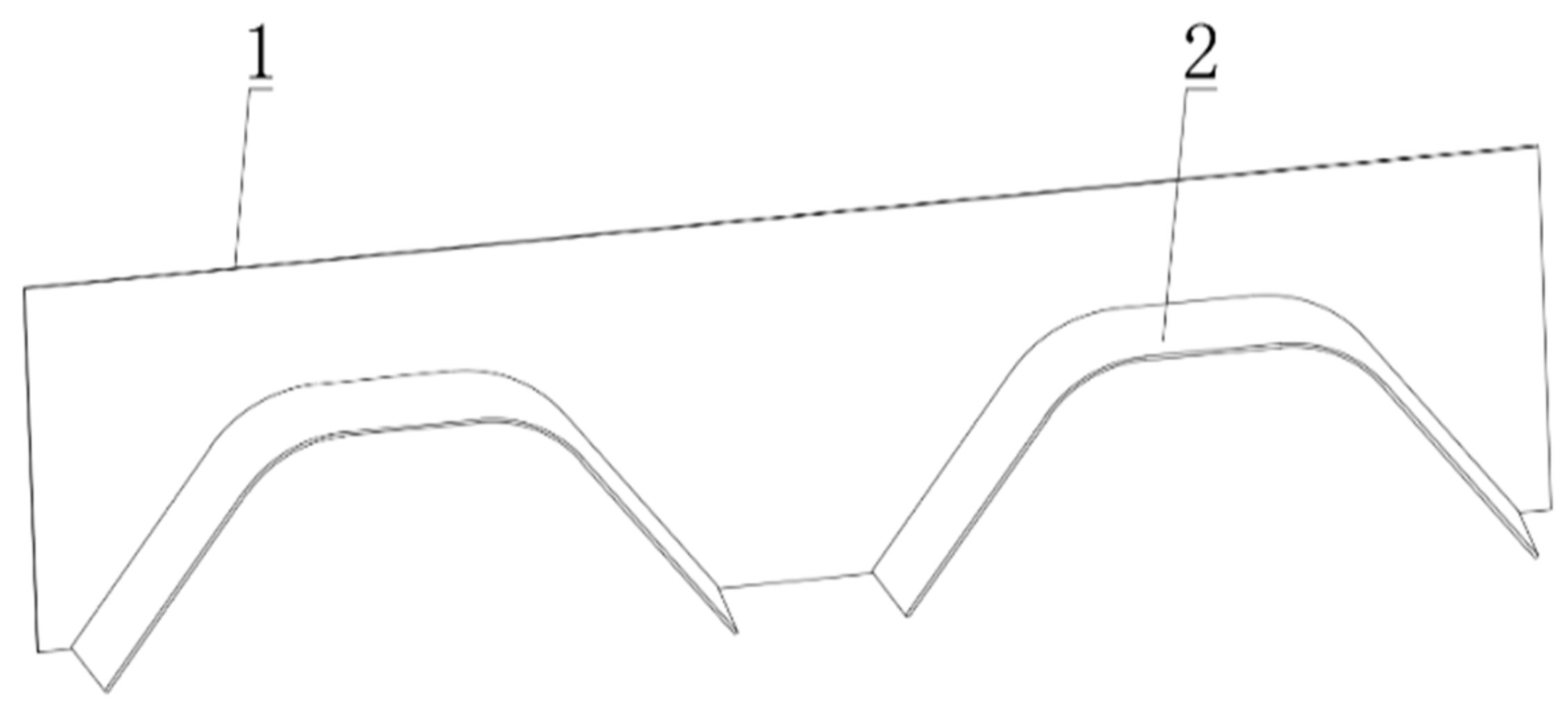
2.5. Design of Ridge Forming Part
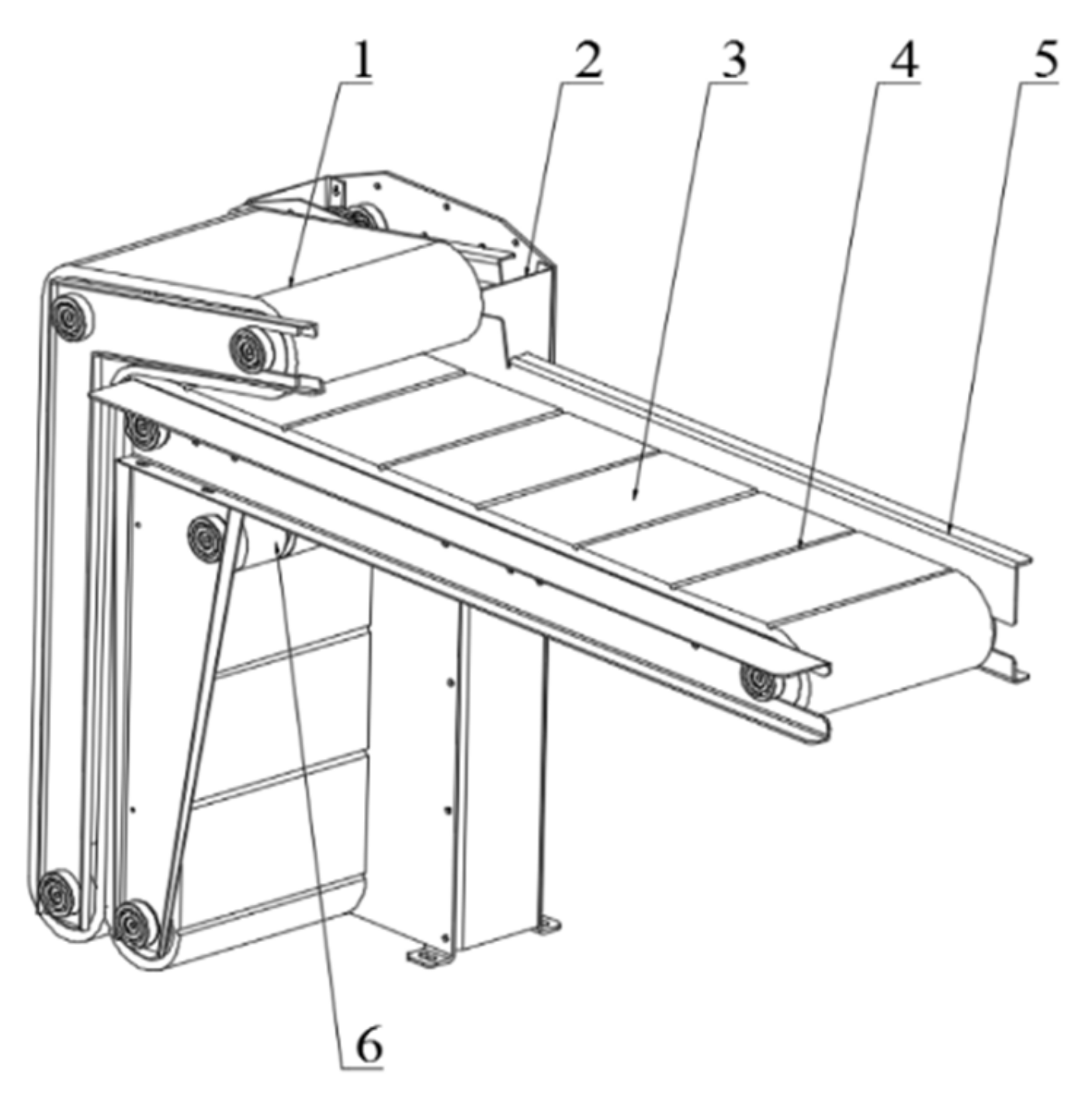
2.6. Design of Belt Seedling Conveying Part
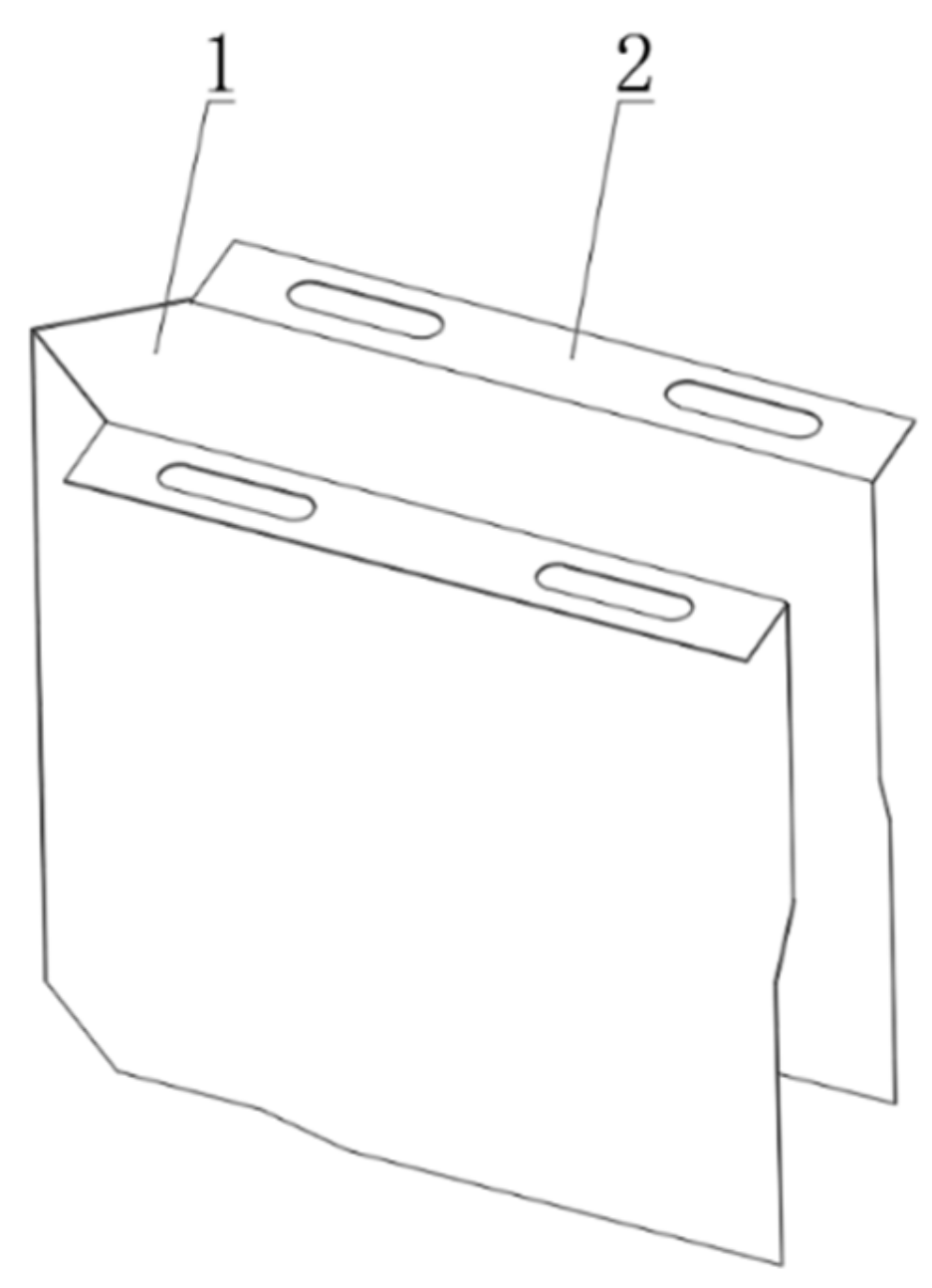
2.7. Design of Ditching Depth Parts
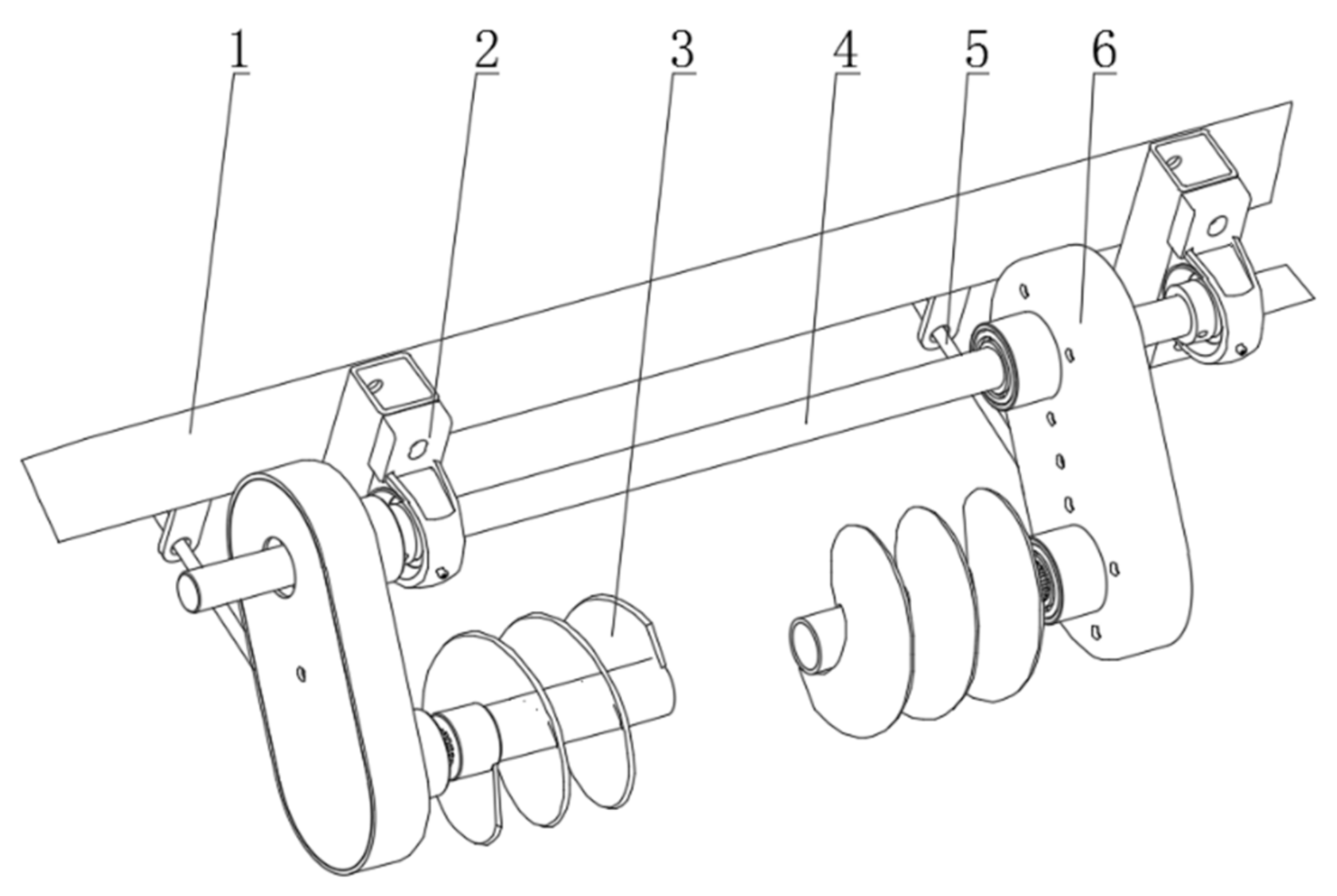
2.8. Design of Mulching and Planting Parts
- (1)
- The screw conveying capacity must be greater than the amount of soil feeding, otherwise it will cause sludge;
- (2)
- The soil cannot produce jumping and rolling perpendicular to the conveying direction;
- (3)
- The soil is transported along the axial direction, and the axial force and axial velocity are greater than 0.
- Spiral outer diameter
- Shaft diameter
- Spiral speed
- Screw pitch
3. Results
3.1. Test Conditions and Equipment
3.2. Experimental Design and Methods
3.3. Test Results and Analysis
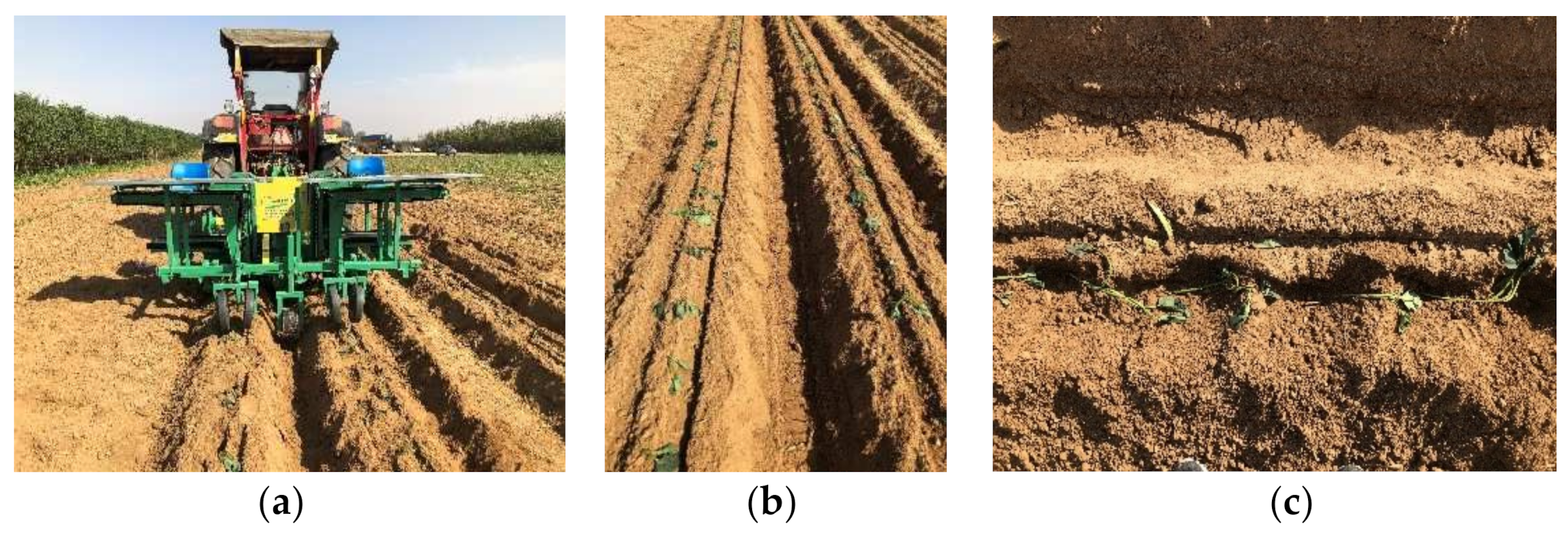
3.4. Field Trial
4. Discussion
5. Conclusions
- (1)
- In view of the problems of difficult horizontal planting, high labor intensity, poor operation quality and low economy in the existing sweet potato transplanting technology and equipment, a horizontal transplanting machine for bare sweet potato seedlings is designed, which can realize multiple processes such as rotary tillage and ridge raising, ditching and transplanting, and soil-covered seedlings, providing a new method for horizontal transplanting of bare sweet potato seedlings;
- (2)
- Analyze the main parameters affecting the working performance and working effect of the whole machine, determine the relevant position and motion parameters, and select the optimal working parameter combination through the performance test. The test results show that the primary and secondary order of the significance of the qualified rate of plant spacing for the impact evaluation index is , , and the optimal level combination of influencing factors is , the forward speed of the machine is 0.17 m·s−1, and the spacing of the ribbons is 110 mm, the screw speed is 170 rpm;
- (3)
- The field test results showed that: under the optimal combination of factor levels, the -average rate of plant spacing was 91.87%, which met the relevant technical standards and agronomic requirements.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ma, D.F.; Li, Q.; Cao, Q.H.; Niu, F.X.; Xie, Y.P.; Tang, J.; Li, H.M. Development and prospect of sweet potato industry and its technologies in China. Jiangsu JOAS 2012, 28, 969–973. [Google Scholar]
- Hu, L.L.; Ji, F.L.; Wang, B.; Ling, X.Y.; Hu, Z.C.; Yu, X.T. Latest developments of sweet potato mechanical transplanting in China. J. Chin. Agric. 2015, 36, 289–291. [Google Scholar]
- Yan, W.; Zhang, W.Y.; Hu, M.J.; Ji, Y.; Li, K.; Qi, B. Present situation of research and expectation on plant mechanization of sweet potato in China and abroad. J. Chin. Agric. 2018, 39, 12–16. [Google Scholar]
- Sarkar, P.; Upadhyay, G.; Raheman, H. Active-passive and passive-passive configurations of combined tillage implements for improved tillage and tractive performance. Span J. Agric. Res. 2021, 19, e02R01. [Google Scholar] [CrossRef]
- Ahmadi, I. A power estimator for an integrated active-passive tillage machine using the laws of classical mechanics. Soil Till. Res. 2017, 171, 1–8. [Google Scholar] [CrossRef]
- Upadhyay, G.; Raheman, H. Performance of combined offset disc harrow (front active and rear passive set configuration) in soil bin. J. Terramech. 2018, 78, 27–37. [Google Scholar] [CrossRef]
- Zhang, L.M.; Ma, D.F. Main Cultivation Modes of Sweet Potato in China, 1st ed.; China Agricultural Science and Technology Press: Beijing, China, 2012; pp. 102–108. [Google Scholar]
- Zhao, H.; Liu, X.X.; Pan, Z.G.; Li, L.; Sun, Y. Agronomic characteristics and mechanized planting technology of sweet potato. J. Chin. Agric. 2021, 42, 21–26. [Google Scholar]
- Shao, Y.Y.; Xuan, G.T.; Hou, J.L.; Hu, Z.C.; Wang, Y.X.; Liu, Y. Design and Simulation of sweet potato mulched transplanting mechanism with “boat”-shape. ASABE 2018, 39, 2–6. [Google Scholar]
- Zhao, S.H.; Gu, Z.Y.; Yuan, Y.W.; Lu, J.Q. Bionic Design and Experiment of Potato Curved Surface Sowing Furrow Opener. Trans. CSAM 2021, 52, 32–42. [Google Scholar]
- Zhao, S.H.; Yang, L.L.; Zhang, X.; Hou, L.T.; Yuan, Y.W.; Yang, Y.Q. Design and Experiment of Zigzag Opener for Double-row No-tillage Seeding on Soybean Ridge. Trans. CSAM 2022, 53, 74–84. [Google Scholar]
- Zeng, S.; Tang, H.T.; Luo, X.W.; Ma, G.H.; Wang, Z.M.; Zang, Y.; Zhang, M.H. Design and experiment of precision rice hill-drop drilling machine for dry land with synchronous fertilizing. Trans. CSAE 2012, 28, 12–19. [Google Scholar]
- Qi, J.T.; Meng, H.W.; Kan, Z.; Li, C.S.; Li, Y.P. Analysis and test of feeding performance of dual-spiral cow feeding device based on EDEM. Trans. CSAE 2017, 33, 65–71. [Google Scholar]
- Yang, W.W.; Luo, X.W.; Wang, Z.M.; Zhang, M.H.; Zeng, S.; Zang, Y. Design and experiment of track filling assembly mounted on wheeled-tractor for paddy fields. Trans. CSAE 2016, 32, 26–31. [Google Scholar]
- Meng, H.W.; Gao, Z.J.; Kan, Z.; Lin, H. Design and experiment on dairy cow precision-feeding device based on equal-diameter and variable-pitch. Trans. CSAE 2011, 27, 103–107. [Google Scholar]
- Dai, F.; Zhang, S.L.; Song, X.F.; Zhao, W.Y.; Ma, H.J.; Zhang, F.W. Design and Test of Combined Operation Machine for Double Width Filming and Covering Soil on Double Ridges. Trans. CSAM 2020, 51, 108–117. [Google Scholar]
- Chen, K. Experimental Design and Analysis, 2nd ed.; Tsinghua University Press: Beijing, China, 2015; pp. 172–188. [Google Scholar]
- Shao, Y.Y.; Liu, Y.; Xuan, G.T.; Hu, Z.C.; Han, X.; Wang, Y.X.; Chen, B.; Wang, W.Y. Design and Test of Multifunctional Vegetable Transplanting Machine. IFAC 2019, 52, 92–97. [Google Scholar] [CrossRef]
- Shi, Y.Y.; Luo, W.W.; Hu, Z.C.; Wu, F.; Gu, F.W.; Chen, Y.Q. Design and Test of Equipment for Straw Crushing with Strip-laying and Seed-belt Classification with Cleaning under Full Straw Mulching. Trans. CSAM 2019, 50, 58–67. [Google Scholar]
- GB/T 5262; Measuring Methods for Agricultural Machinery Testing Conditions-General Rules. China National Standardization Administration Committee Press: Beijing, China, 2008.
- Dai, F.; Zhao, W.Y.; Song, X.F.; Xin, S.L.; Liu, F.J.; Xin, B.B. Operating Parameter Optimization and Experiment of Device with Elevating and Covering Soil on Plastic-film. Trans. CSAM 2017, 48, 88–96. [Google Scholar]
- Yan, W.; Hu, Z.C.; Wu, N.; Xu, H.B.; You, Z.Y.; Zhou, X.X. Parameter optimization and experiment for plastic film transport mechanism of shovel screen type plastic film residue collector. Trans. CSAE 2017, 33, 17–24. [Google Scholar]
- Hu, L.L.; Wang, B.; Wang, G.P.; Yu, Z.Y.; You, Z.Y.; Hu, Z.C.; Wang, B.K.; Gao, X.M. Design and experiment of type 2ZGF-2 duplex sweet potato transplanter. Trans. CSAE 2016, 32, 8–16. [Google Scholar]
- Xiang, W.; Wu, M.L.; Guan, C.Y.; Xu, Y.J. Design and experiment of planting hole forming device of crawler transplanter for rape (Brassica napus) seedlings. Trans. CSAE 2015, 31, 12–18. [Google Scholar]
- Xu, H.B.; Hu, Z.C.; Zhang, P.; Gu, F.W.; Song, W.L.; Wang, C.C. Optimization and Experiment of Straw Back-Throwing Device of No-Tillage Drill Using Multi-Objective QPSO Algorithm. Agriculture 2021, 11, 986. [Google Scholar] [CrossRef]
- Yang, H.G.; Yan, J.C.; Wei, H.; Wu, H.C.; Wang, S.Y.; Ji, L.L.; Xu, X.W.; Xie, H.X. Gradient Cleaning Method of Potato Based on Multi-Step Operation of Dry-Cleaning and Wet Cleaning. Agriculture 2021, 11, 1139. [Google Scholar] [CrossRef]
- Nataraj, E.; Sarkar, P.; Raheman, H.; Upadhyay, G. Embedded digital display and warning system of velocity ratio and wheel slip for tractor operated active tillage implements. J. Terramech. 2021, 97, 35–43. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Project | Parameter |
|---|---|
| Working width/mm | 2200 |
| Supporting power/kW | ≥66.19 |
| Number of blades | 52 |
| Tillage depth/mm | 180 |
| Turning radius/mm | 240 |
| Operating speed/m·s−1 | ≥0.1 |
| Number of job lines | 2 |
| Test Level | The Forward Speed of the Machine v/m·s−1 | Spacing of the Ribbons τ/mm | The Screw Speed n/rpm |
|---|---|---|---|
| 1 | 0.15 | 110 | 130 |
| 2 | 0.17 | 120 | 150 |
| 3 | 0.19 | 130 | 170 |
| Test Number | Test Factor | Test Index | |||
|---|---|---|---|---|---|
| Plant Spacing Qualification Rate Z/% | |||||
| 1 | 1 | 1 | 1 | 91.56 | |
| 2 | 1 | 2 | 2 | 87.63 | |
| 3 | 1 | 3 | 3 | 88.47 | |
| 4 | 2 | 1 | 2 | 93.46 | |
| 5 | 2 | 2 | 3 | 94.28 | |
| 6 | 2 | 3 | 1 | 90.26 | |
| 7 | 3 | 1 | 3 | 93.42 | |
| 8 | 3 | 2 | 1 | 89.74 | |
| 9 | 3 | 3 | 2 | 86.59 | |
| z | k1 | 89.22 | 92.81 | 90.52 | |
| k2 | 92.67 | 90.55 | 89.06 | ||
| k3 | 89.92 | 88.44 | 92.06 | ||
| k4 | 3.45 | 4.37 | 2.82 | ||
| Evaluation Indicators | Source of Variation | Sum of Square | Degrees of Freedom | Sum of Mean Squares | ||
|---|---|---|---|---|---|---|
| calibration model | 62.23 | 6 | 10.37 | 64.24 | 0.015 * | |
| 20.69 | 2 | 10.35 | 64.06 | 0.015 * | ||
| 28.75 | 2 | 14.37 | 89.00 | 0.011 * | ||
| 12.80 | 2 | 6.40 | 39.64 | 0.025 * | ||
| error | 0.32 | 2 | 0.16 |
| Test Serial Number | Plant Spacing Qualification Rate Z/% |
|---|---|
| 1 | 92.36 |
| 2 | 93.62 |
| 3 | 90.56 |
| 4 | 88.67 |
| 5 | 94.28 |
| 6 | 91.75 |
| mean | 91.87 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, W.; Hu, M.; Li, K.; Wang, J.; Zhang, W. Design and Experiment of Horizontal Transplanter for Sweet Potato Seedlings. Agriculture 2022, 12, 675. https://doi.org/10.3390/agriculture12050675
Yan W, Hu M, Li K, Wang J, Zhang W. Design and Experiment of Horizontal Transplanter for Sweet Potato Seedlings. Agriculture. 2022; 12(5):675. https://doi.org/10.3390/agriculture12050675
Chicago/Turabian StyleYan, Wei, Mingjuan Hu, Kun Li, Jia Wang, and Wenyi Zhang. 2022. "Design and Experiment of Horizontal Transplanter for Sweet Potato Seedlings" Agriculture 12, no. 5: 675. https://doi.org/10.3390/agriculture12050675