1. Introduction
Since the rise of the Green Revolution, most countries in the world have begun to vigorously promote modern planting modes, strengthen irrigation and management, and raise the amount of fertilizer and pesticide application to increase the unit and total area output [
1,
2,
3]. The excessive use of chemical fertilizers will have an impact on the agricultural ecological environment, including soil pollution and agricultural water pollution [
4,
5,
6,
7]. Therefore, it is essential to maintain sustainable agricultural development, protect soil ecosystems and promote the rational use of chemical fertilizers [
8,
9,
10]. Regarding crop production and planting, the most common method of fertilizer application is to throw solid granular fertilizer, but the application of solid fertilizer on the surface of soil is very volatile. This causes the loss of nutrients and environmental pollution, and affects the crop absorption rate [
11,
12]. Compared with the solid fertilizer, liquid fertilizer deep application technology in the near root of the crop can significantly improve the efficiency of fertilizer utilization and reduce the volatilization and environmental pollution of fertilizer [
13]. However, as for the deep application of liquid fertilizer, many problems are found in the opener, an important part of the project, such as high open furrow forces, large disturbance to soil, and low efficiency. Excessive open furrow forces of the furrow opener will cause excessive energy consumption. Excessive disturbance to the soil will reduce the soil backfill rate and inconsistent backfill depth, which will lead to excessive volatilization of liquid fertilizer, environmental pollution, and it will influence crop absorption [
14,
15,
16]. The current working speed of the deep application machine of liquid fertilizer is typically limited to 6 km h
−1, and the high speed will cause excessive disturbance of soil and affect the effect of fertilization [
17,
18].
Many scholars evaluate the performance of the new opener through computer simulation test. Computer simulation test can reduce the test steps, save the test cost, and reduce the resources required for the design and manufacture of the furrow opener. A discrete element method (DEM) is a numerical simulation method for dealing with discontinuous media first proposed by Cundall in the 1970s, which is used to analyze the mechanical behavior of a granular population [
19]. Since the DEM was put forward, it has been proved to be effective by many scholars for building the coupling model of the furrow opener soil interaction, and it is an effective way to study the granular media and dynamics and optimize the design [
20].
At present, many scholars have studied the characteristics of soil disturbance caused by the furrow opener and defined soil disturbance. Zhao, Liu, Tan, Cao, Zhang, and Yang [
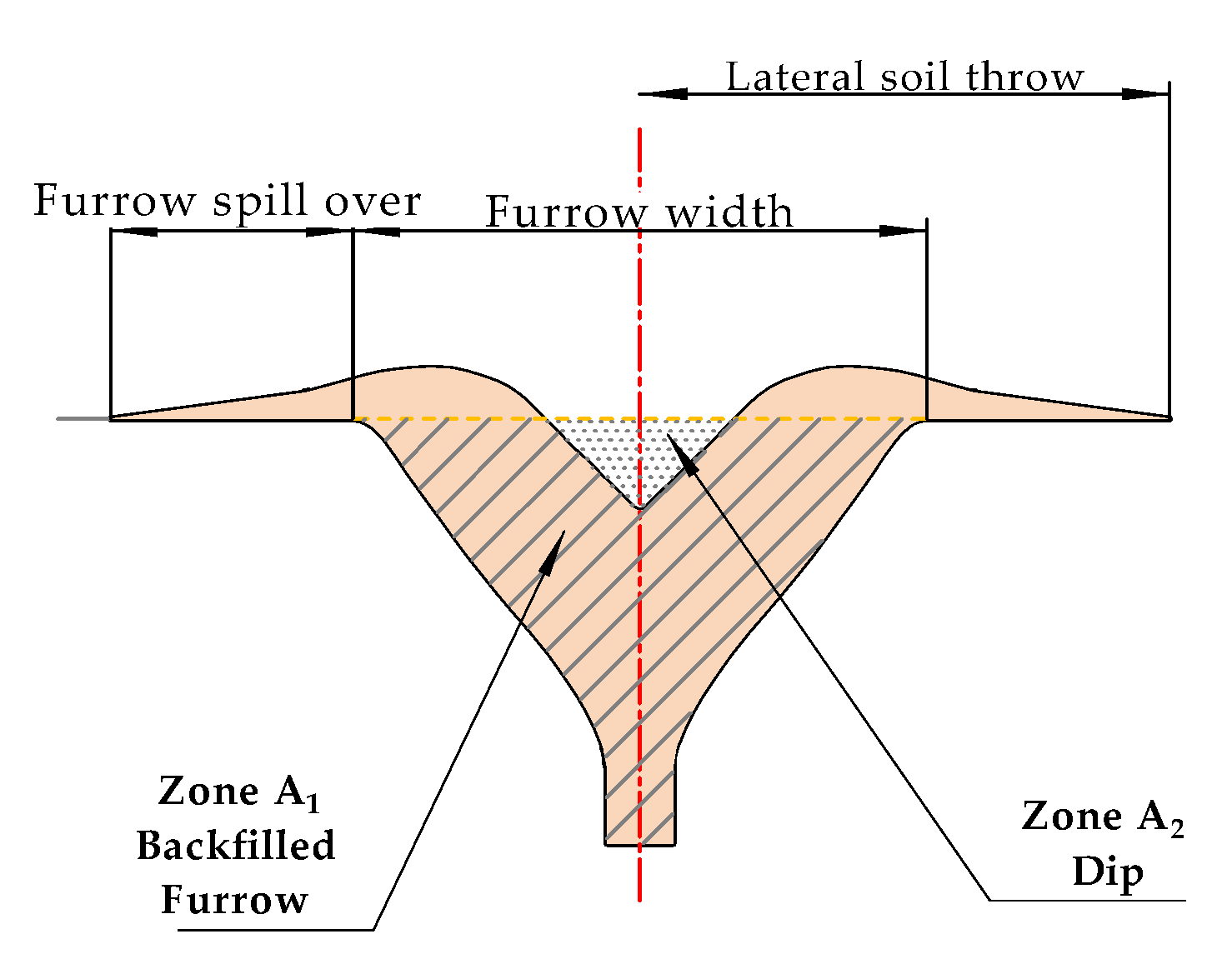
18] selected the key parameters of furrow profile disturbance width and soil backfill depth to measure the degree of soil disturbance. This method only measures the surface parameters of soil furrow profiles, and cannot further quantify the internal disturbance of soil furrow profiles. Francetto et al. [
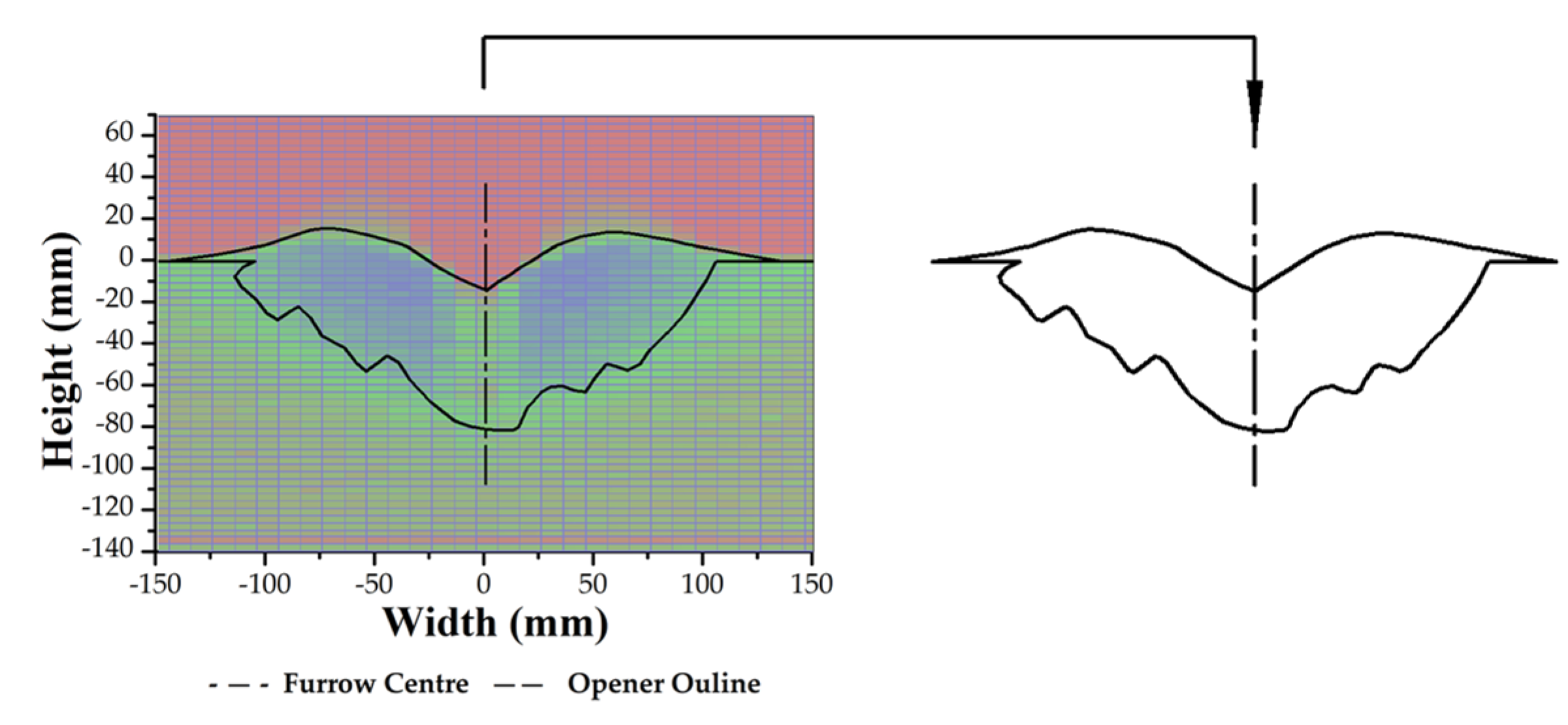
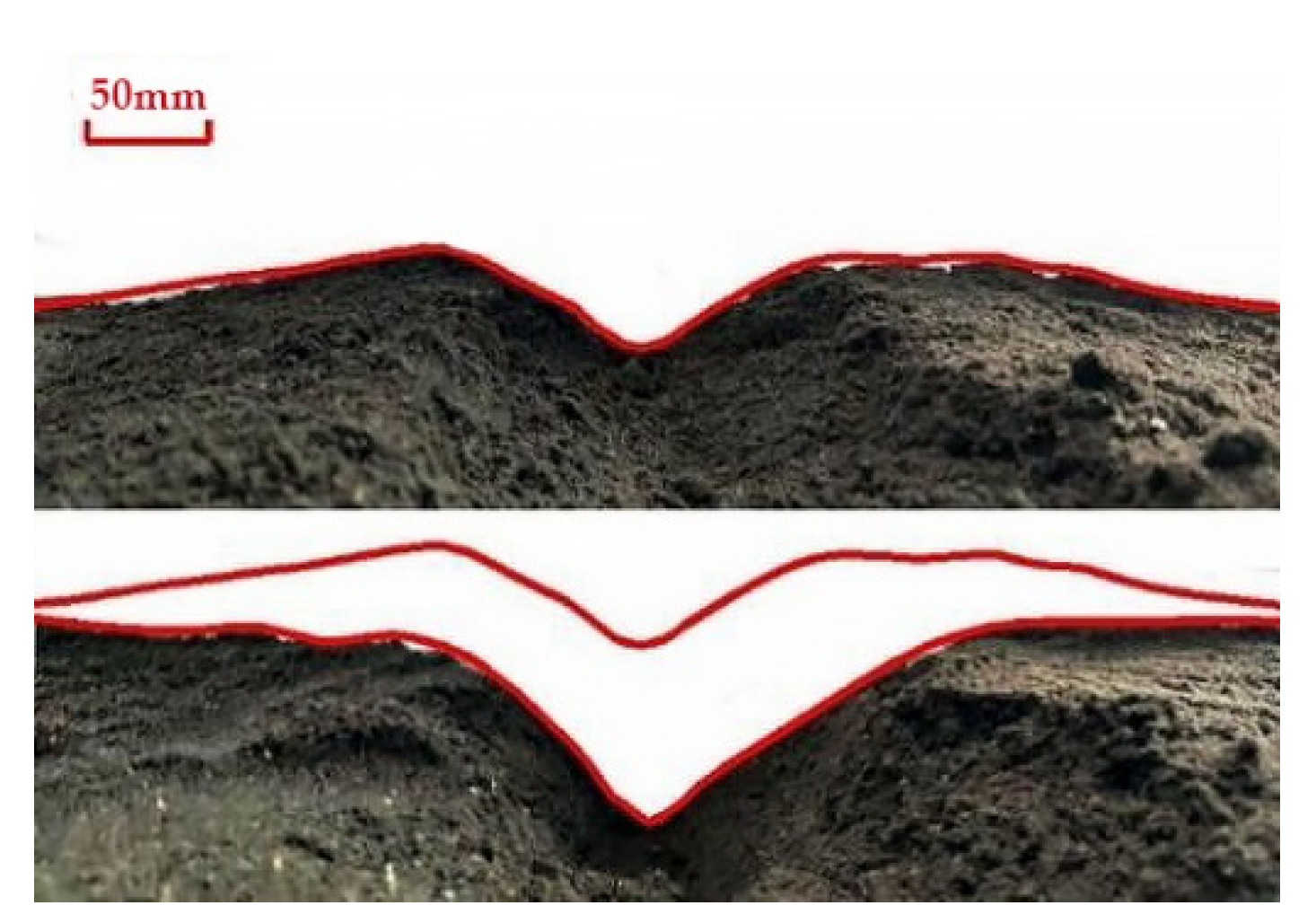
21] measured the disturbance degree of the soil by measuring the raised area (EA), maximum depth (MFD) and width (MFW) of the furrow profile. This method comprehensively quantifies the disturbance of the opener to the soil, but does not further refine the furrow profiles. In this study, the method of Ucgul et al. [
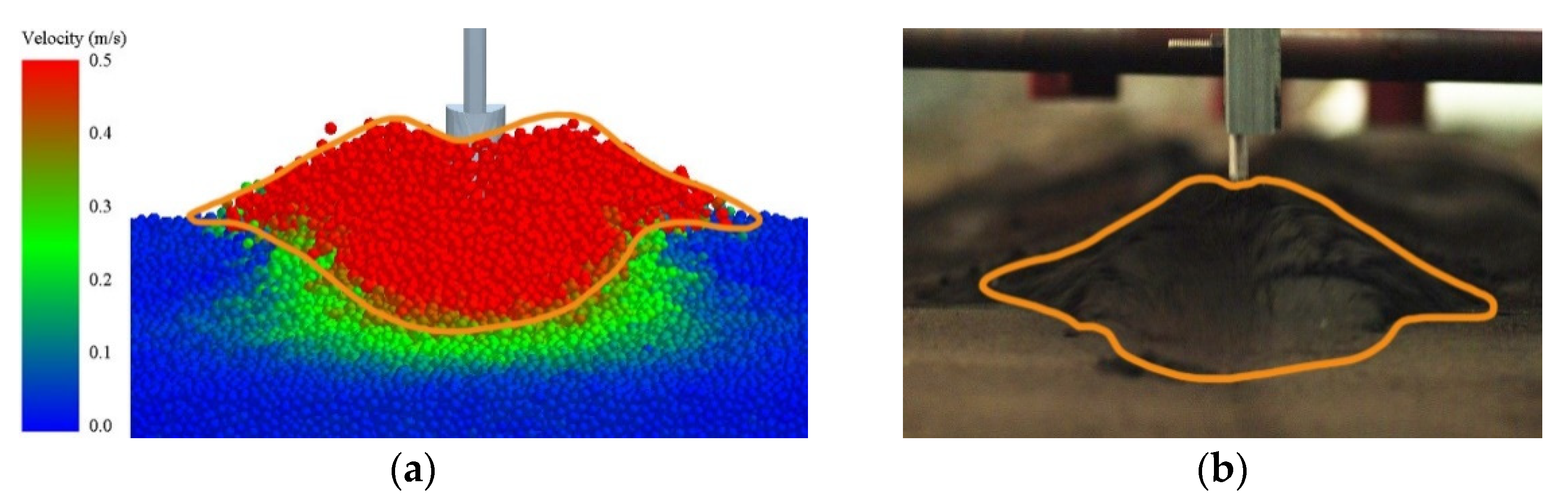
22] is adopted. The soil transportation (volume density reduction) and movement (spatial position change) will be caused by the furrow opener in the process of opening.
Bionics is a comprehensive discipline, which applies the laws and mechanisms found in biology to solve the problems in engineering technology [
23]. After continuous development, its related research has gradually become the focus of academic research [
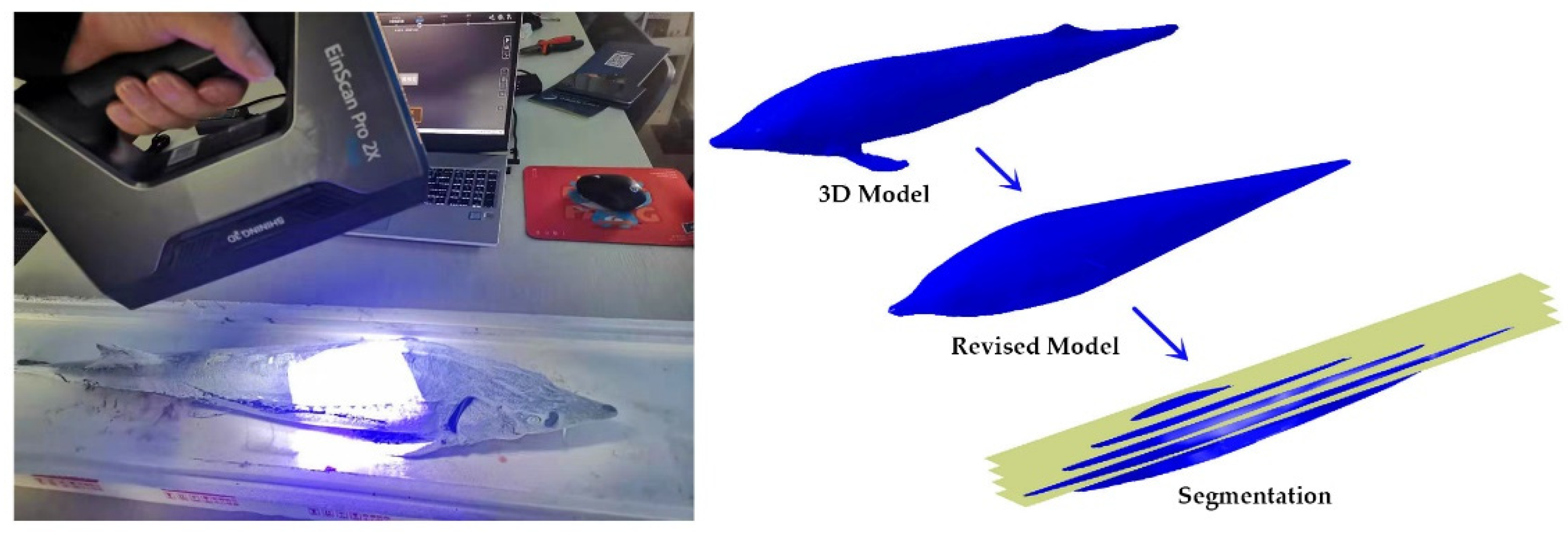
24,
25]. Bionic design methods include curve extraction and fitting by contour projection, 3D reverse engineering model extraction and so on. At present, many researchers design furrow opener shape based on Bionics, and carry out a lot of research. For example, Zhao, Liu, Tan, Cao, Zhang and Yang [
18] designed a new type of furrow opener to reduce the working open furrow forces of the furrow opener through the bionic research on the head curve of swordfish. The research showed that when the water content is 12% ± 1%, the working open furrow forces, the width of soil disturbance and the depth of Furrow backfill increase with the rise of trench depth. When the depth of the furrow is 60 mm, the opening furrow forces increase with the rise of water content, however having no obvious effect on the width of soil disturbance and the depth of furrow backfill. Based on the high efficiency and low open furrow forces penetration structure of the badger’s canine tooth surface, Honglei et al. [
26] designed four kinds of sliding furrow openers, and a comparative test analysis was carried out. The results showed that the optimized sliding openers have lower operation open furrow forces than the core-share furrow opener. Dickinson [
24] designed nine kinds of cassava digging shovel by extracting the forepaw contour of oriental mole and obtained the optimal scheme through experiments, which effectively realized the lightweight of a digging shovel and improved the mechanical performance. These studies provide a theoretical basis for the shape design of the furrow opener. Although many scholars have conducted a lot of research on the bionic furrow opener, most of the research is the application of bionics for designing the furrow opener’s soil penetration curve. There is little research on the influence of the bottom profile curve structure of the furrow opener on the working open furrow forces and soil disturbance in the process of operation.
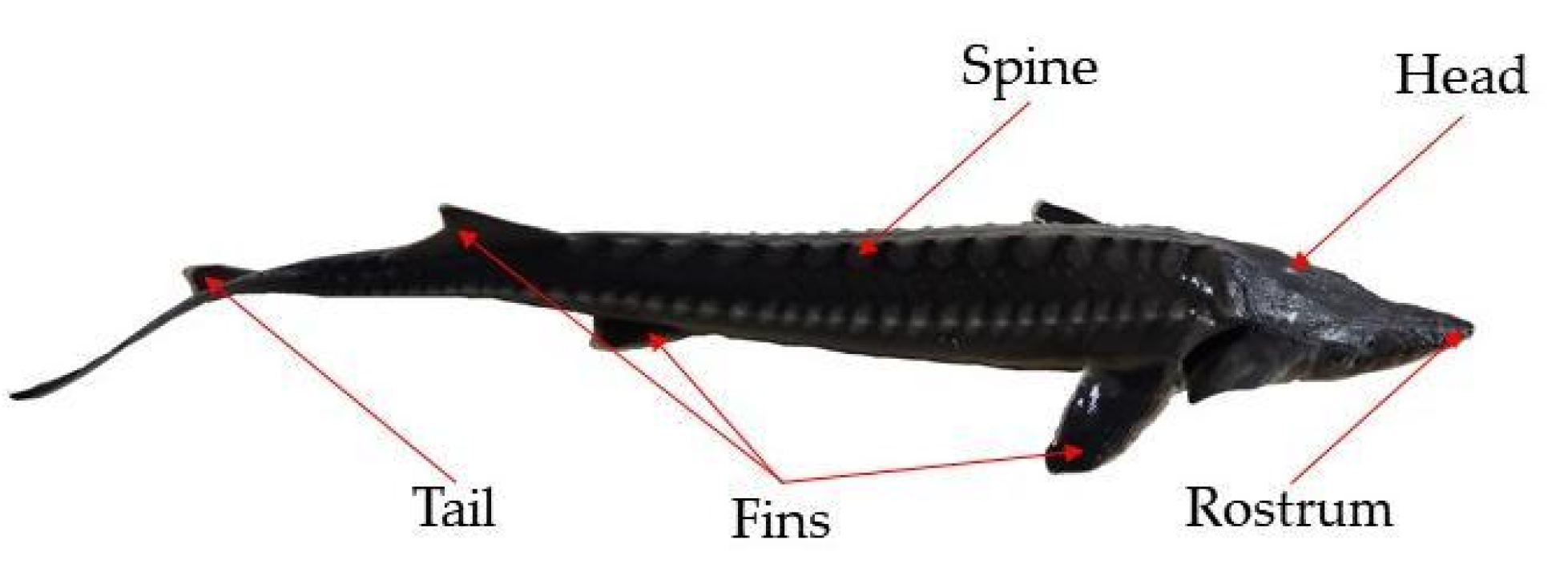
In nature, many animals have streamlined body curves. Sturgeon is an ancient fish species that has lived underwater for millions of years. It has evolved a well-streamlined drag reduction body structure and has a unique spindle body shape. The migratory sturgeon will go up the river for more than 3000 kilometers and return to its birthplace to breed its offspring [
27]. It can be seen that sturgeon has good drag reduction characteristics during swimming. Based on the bionic extraction, Wenfeng et al. [
28] constructed the sturgeon head contour curve to realize the bionic structure of the blade, and the drag reduction mechanism was analyzed.
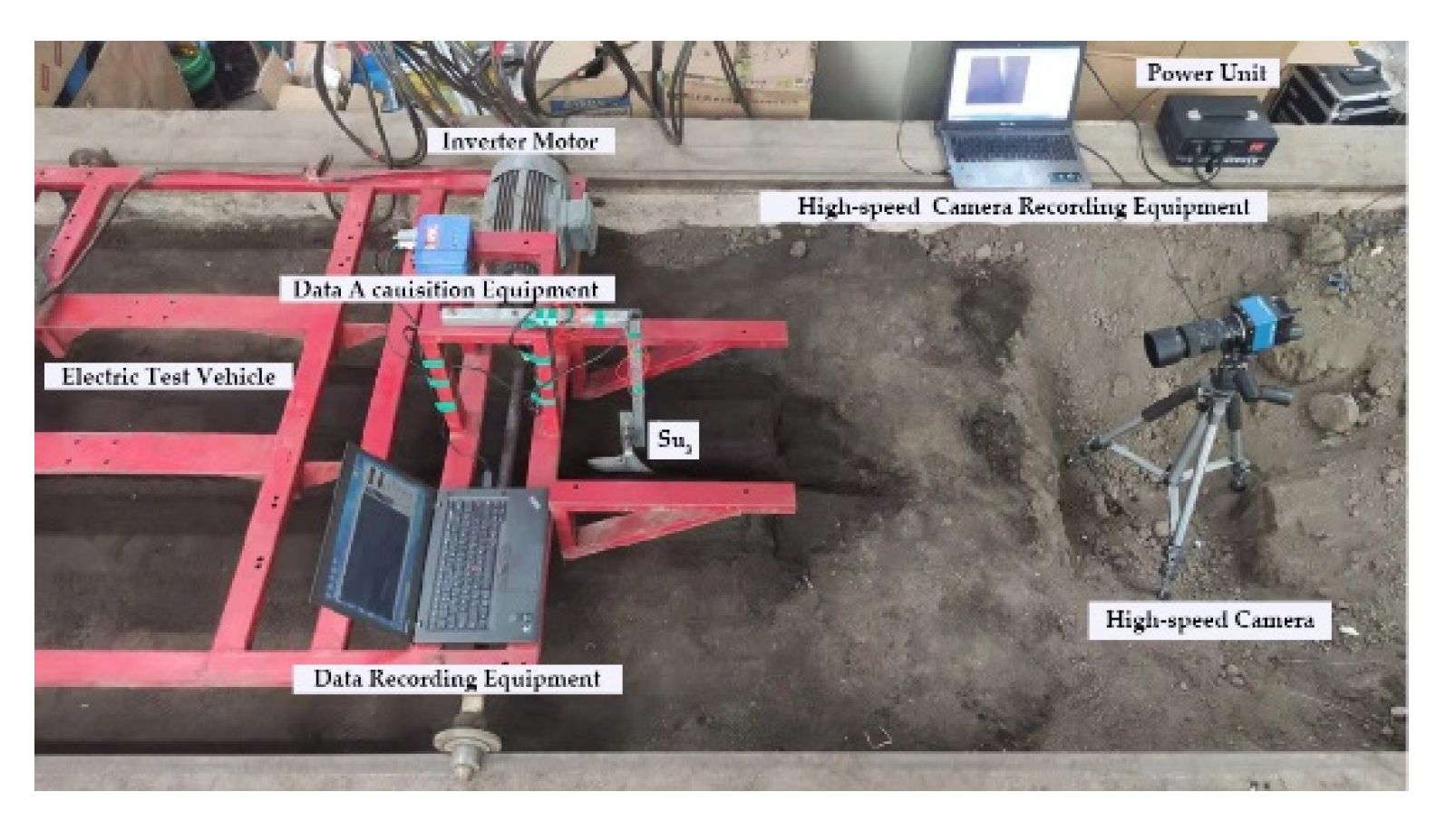
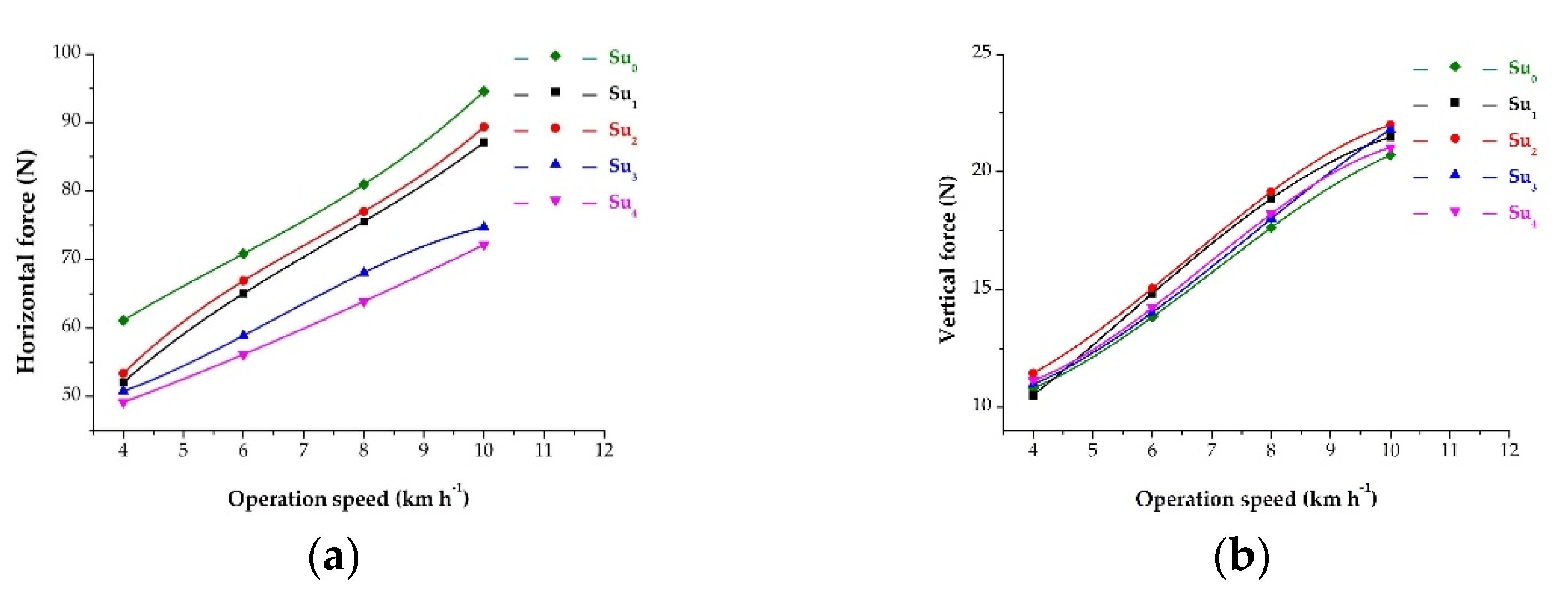
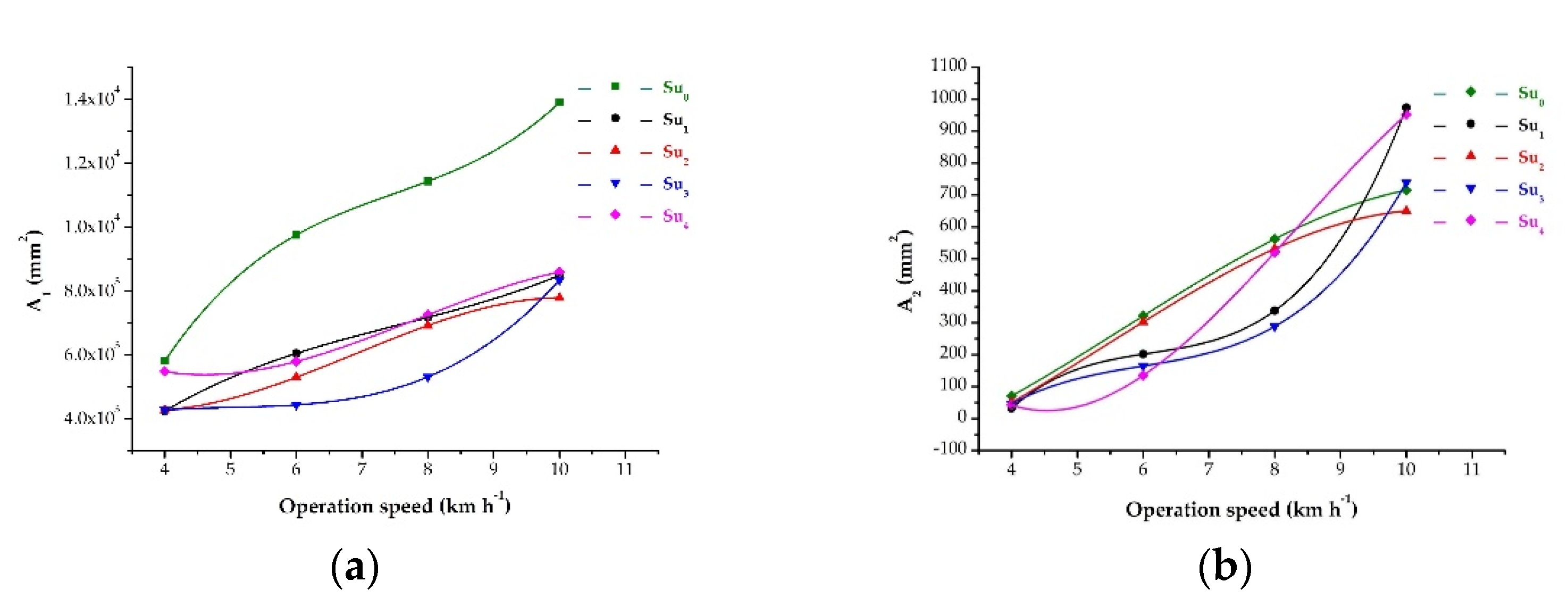
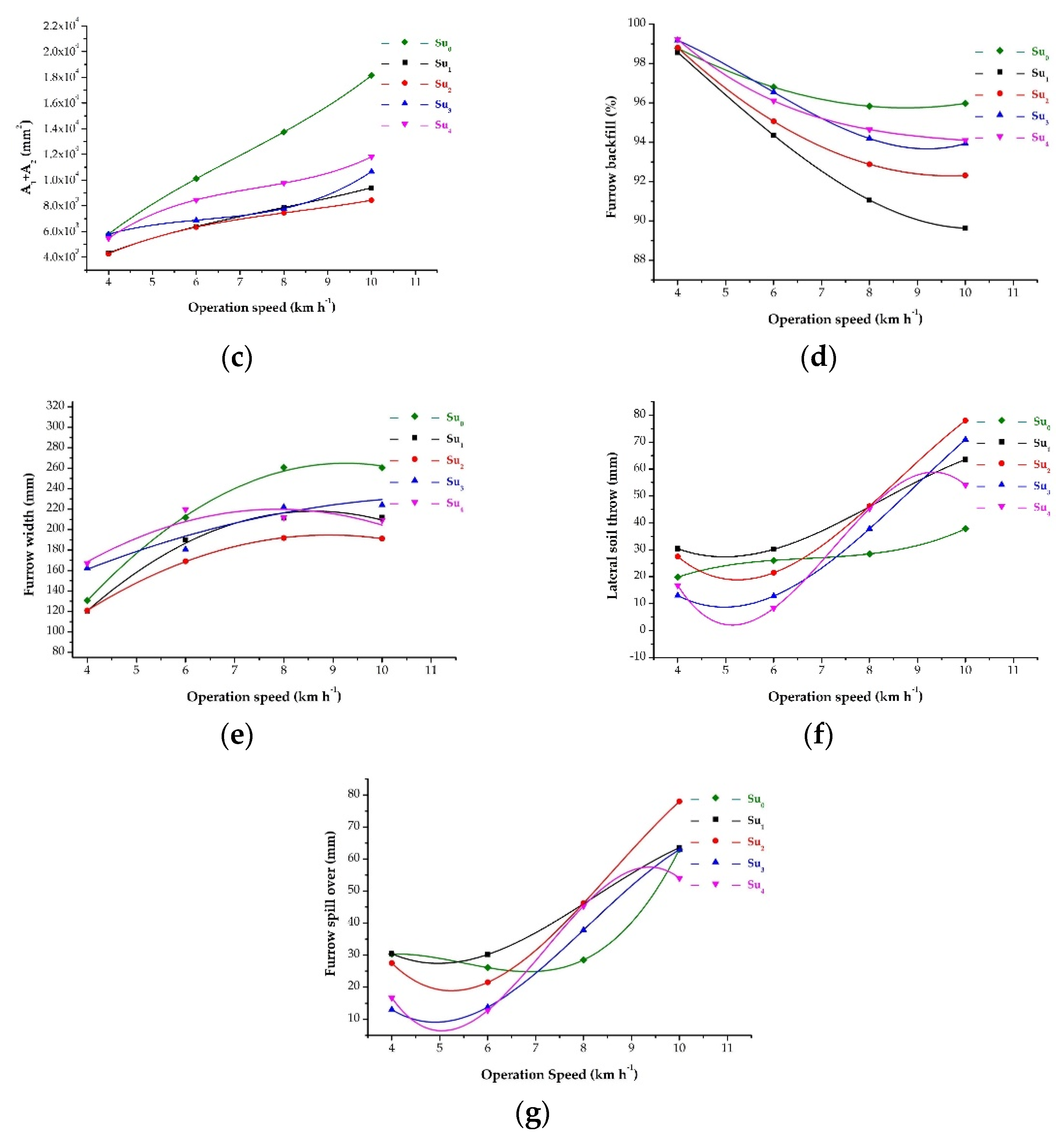
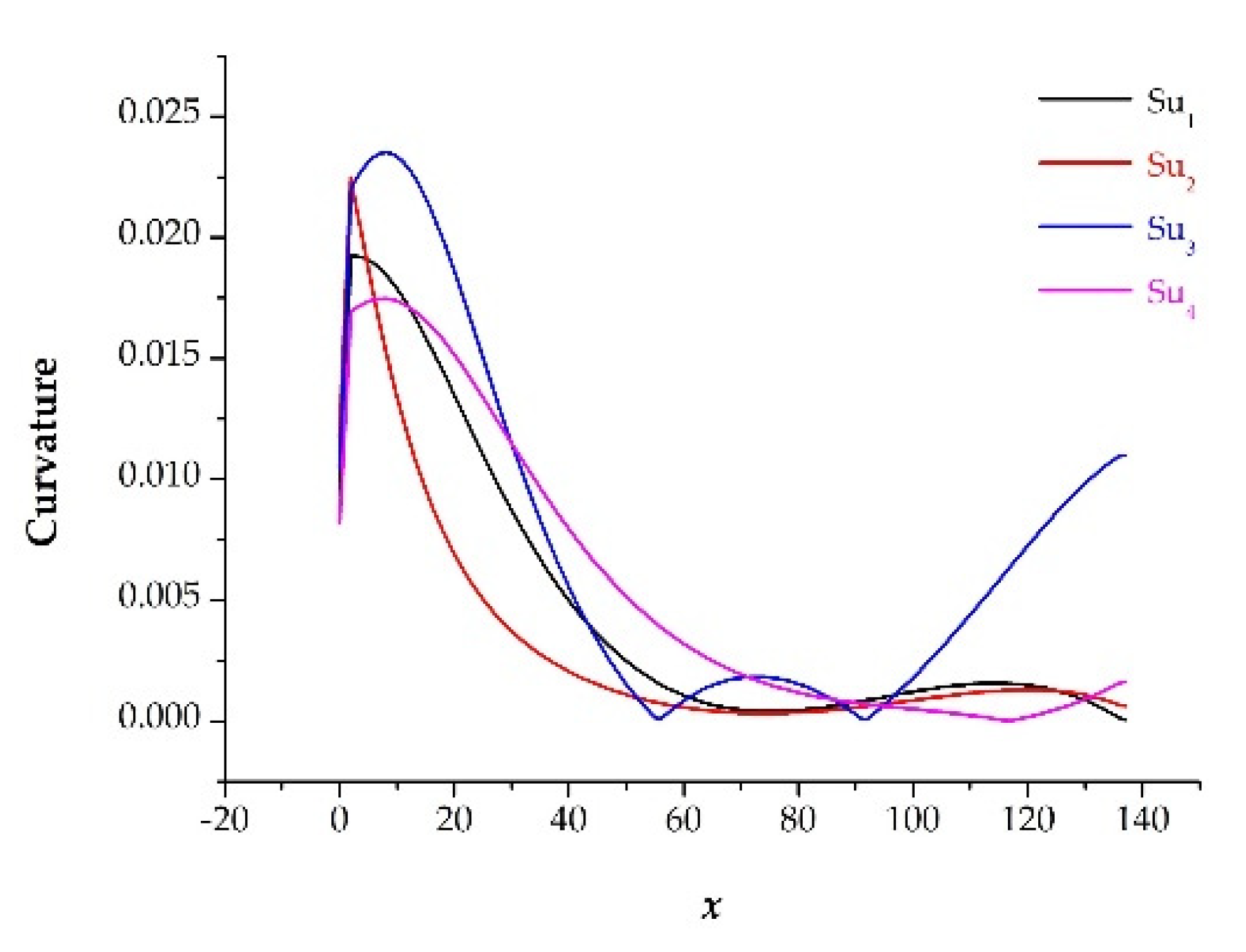
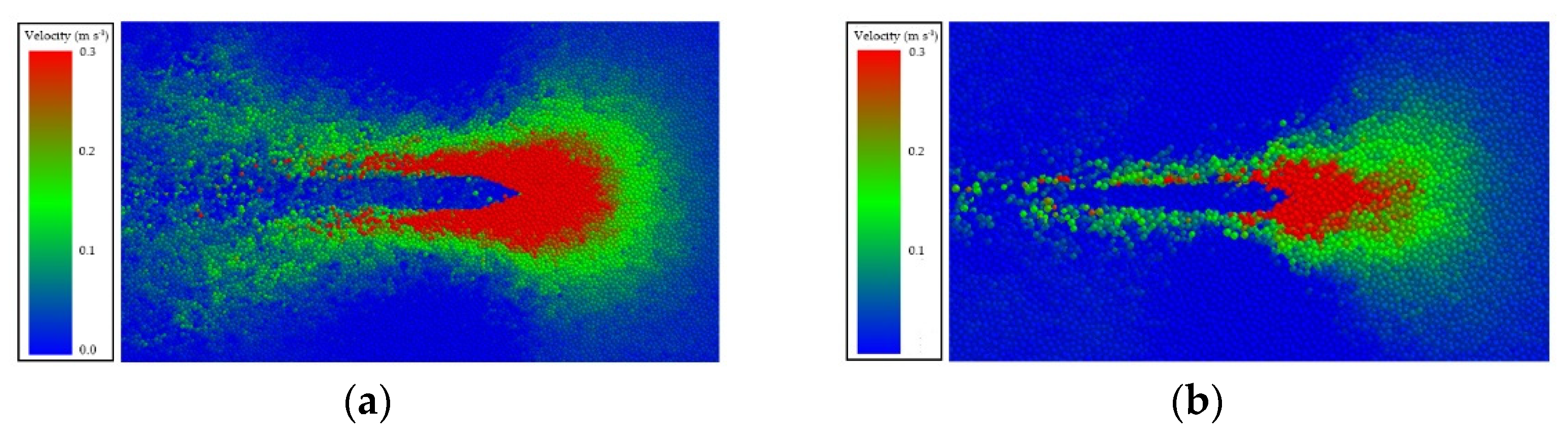
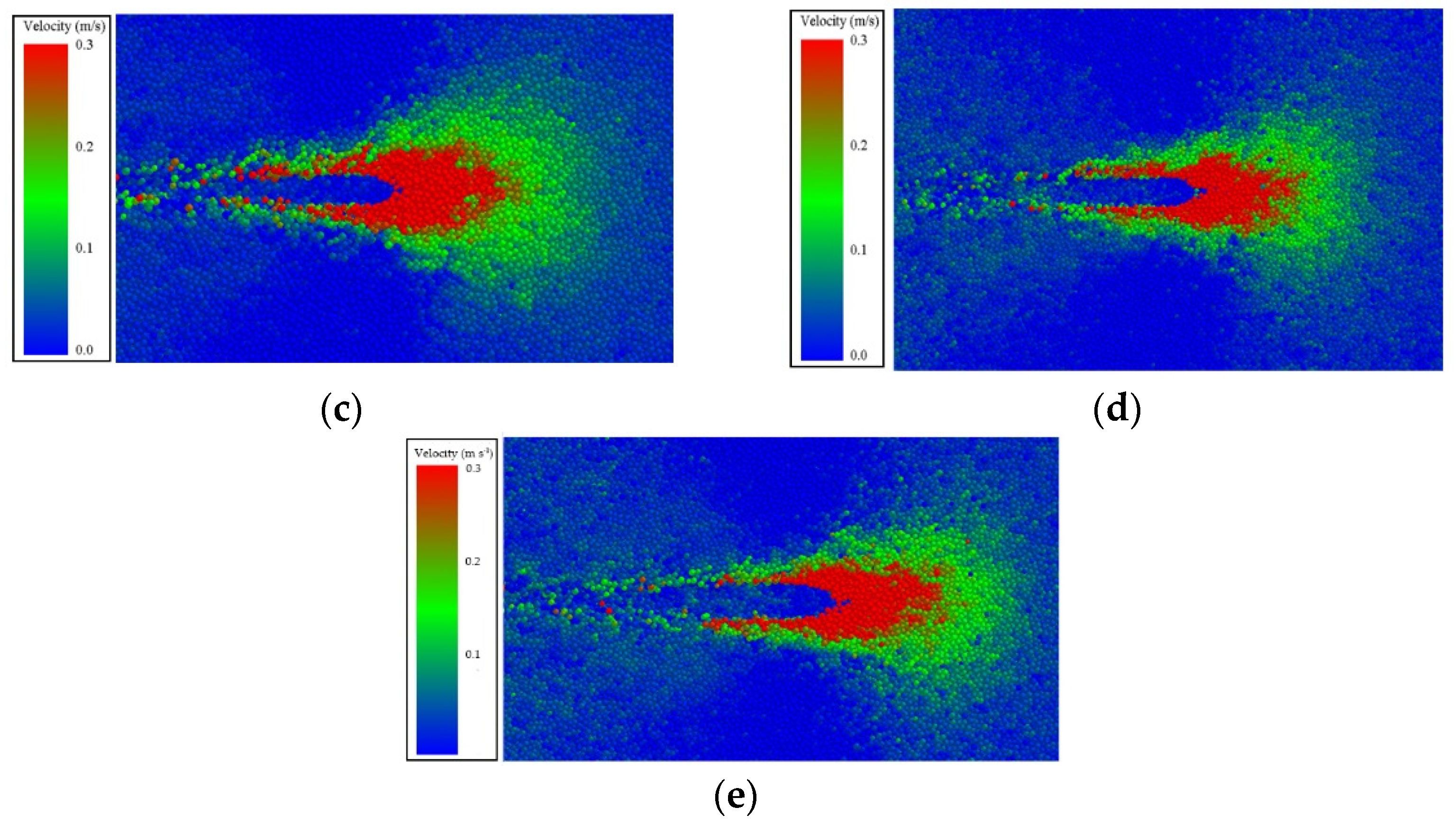
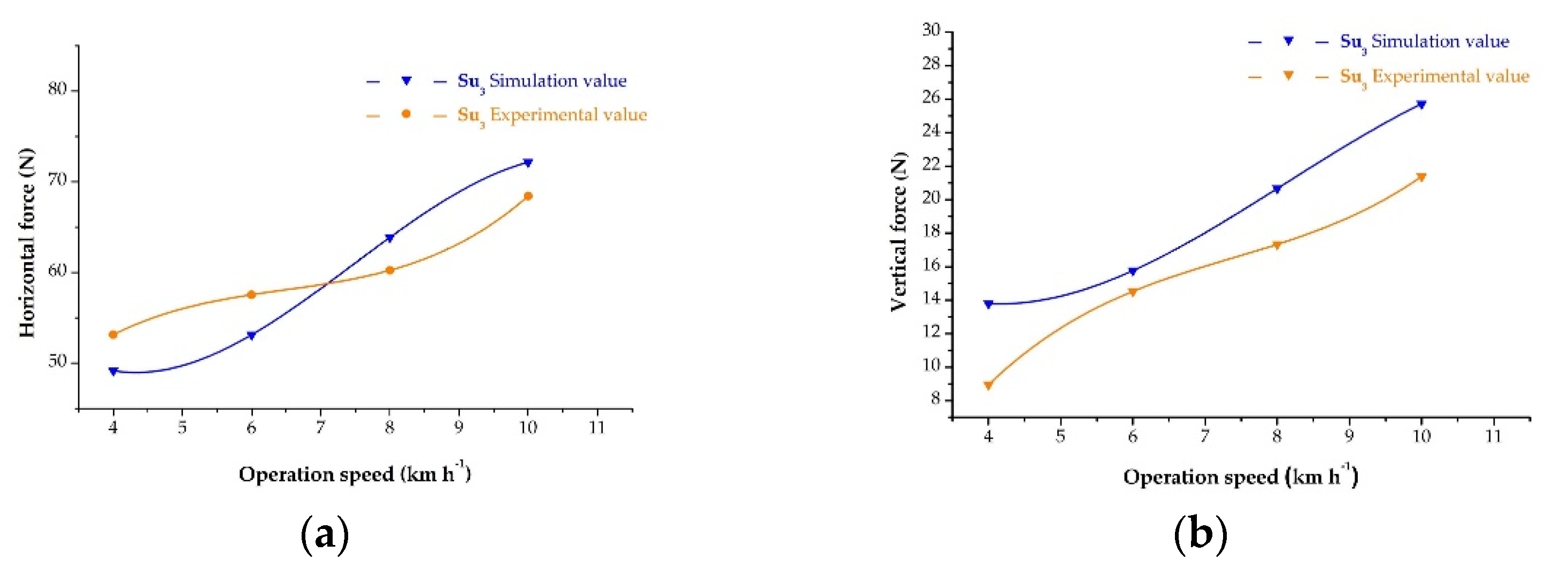
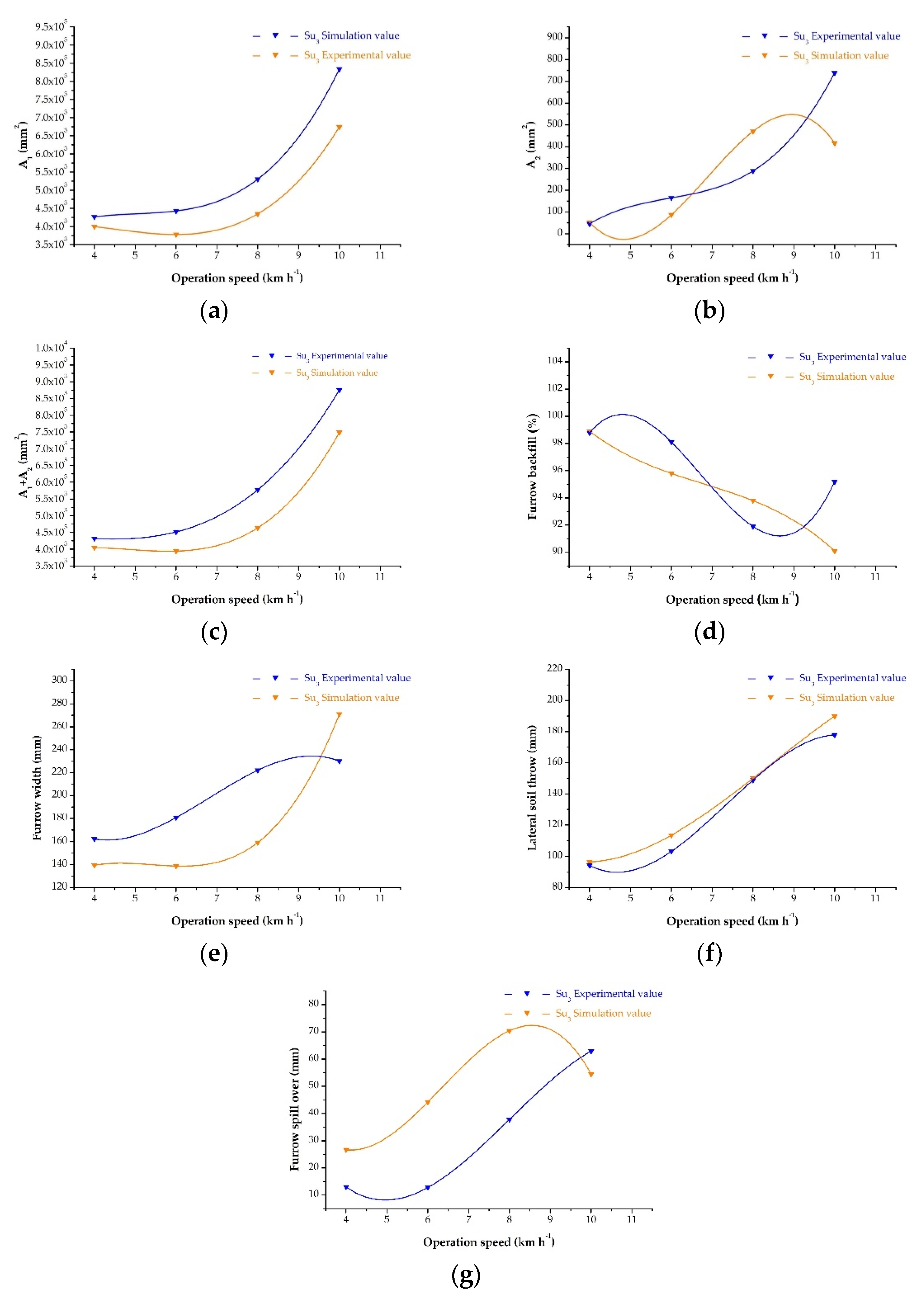
In this study, a comparison test was conducted between the core-share opener commonly used with liquid fertilizer and the bionic sturgeon liquid fertilizer deep application opener by the discrete element method, and the vertical and horizontal forces were extracted by EDEM2020 software. The furrow profile was quantified by extracting the trench profile with a grid composed of porosity parameters to analyze the key furrow profile parameters affecting the effect of liquid fertilizer deep application operation with speed and bottom profile line The pattern was analyzed. Finally, a bench test was conducted and compared with the simulation results.




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}