
Measuring Method of Slip Ratio for Tractor Driving Wheels Based on Machine Vision

Abstract
:1. Introduction
- While the vision-based method has increasingly shown good performance in the measurement of slip ratio, the vision-based method has not been widely used in the field of tractors.
- The previous slip ratio measurement methods often neglect the real-time measurement for tire radius, which will cause the theoretical velocity measurement not to be updated in real-time, and the accuracy is decreased.
2. Materials and Methods
2.1. Materials
2.1.1. Acquisition of the Wheel’s Actual Velocity
2.1.2. Acquisition of the Wheel’s Theoretical Velocity
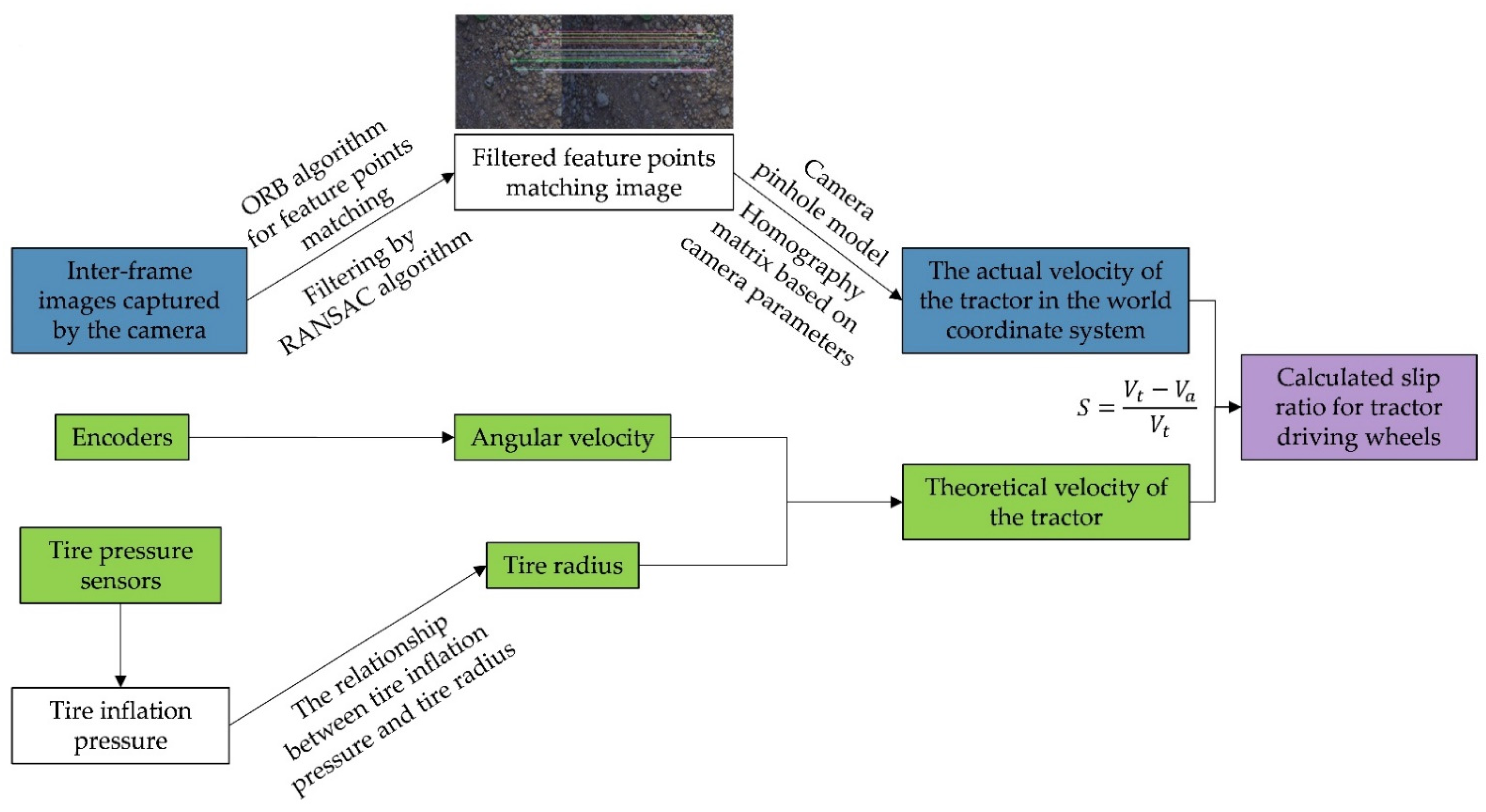
2.2. Methods of Slip Ratio Theory
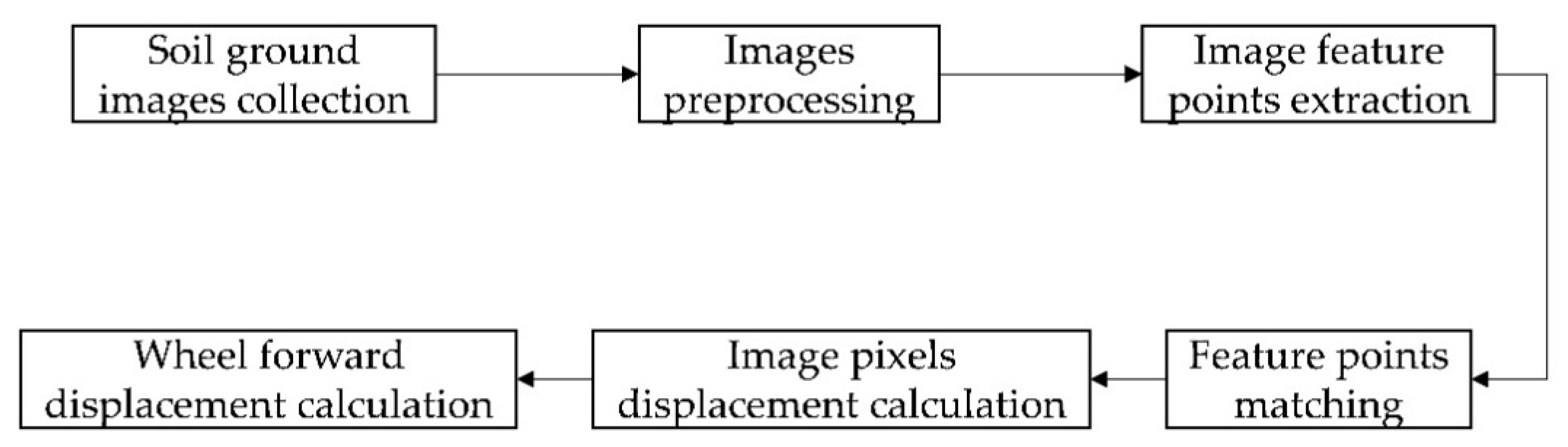
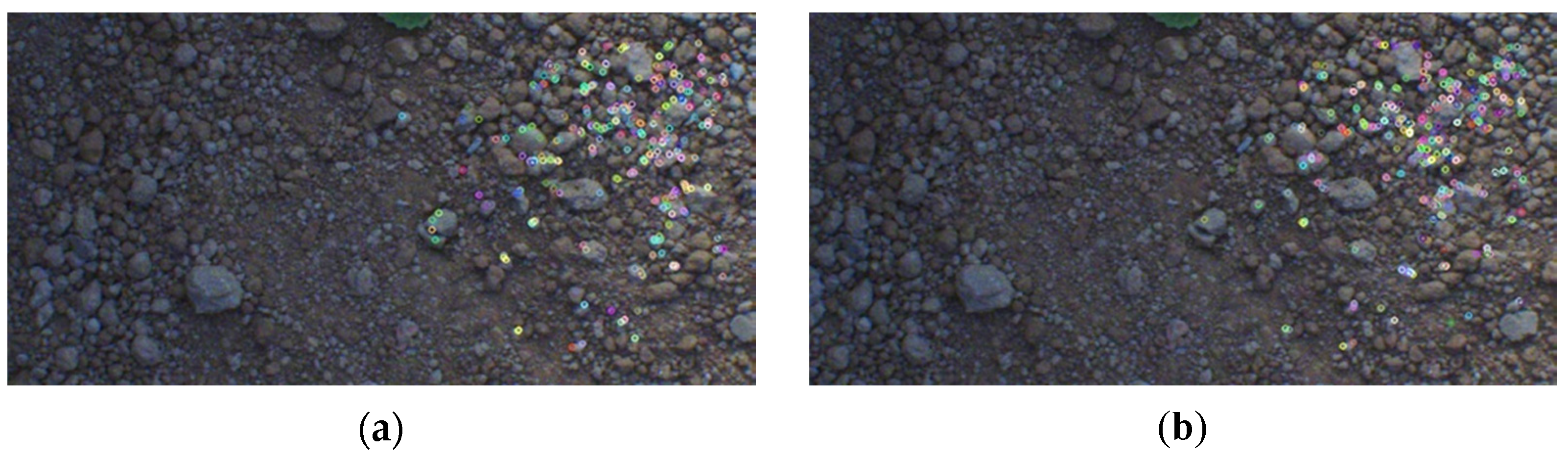
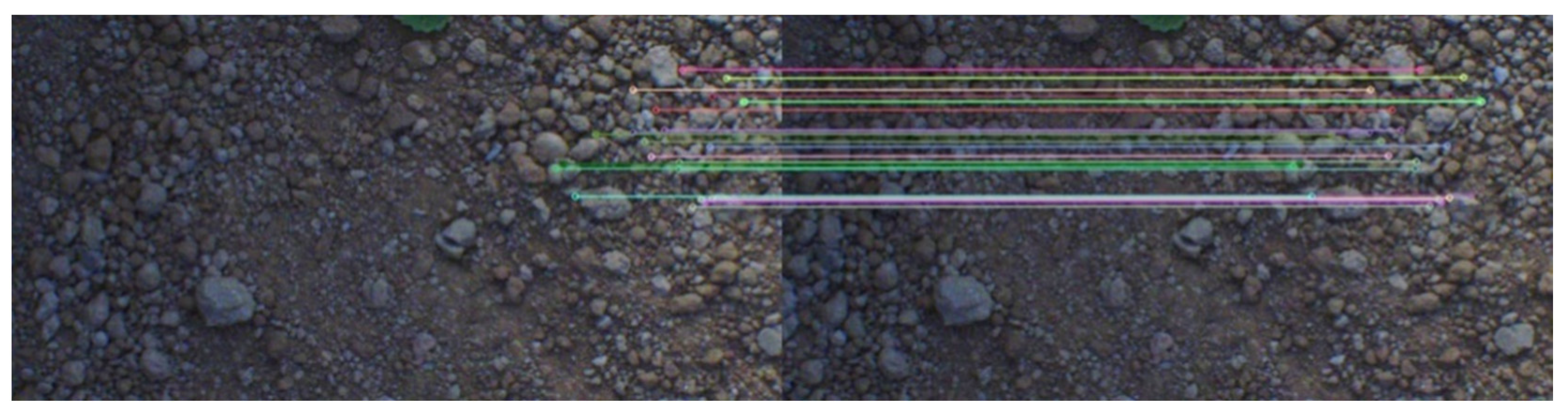
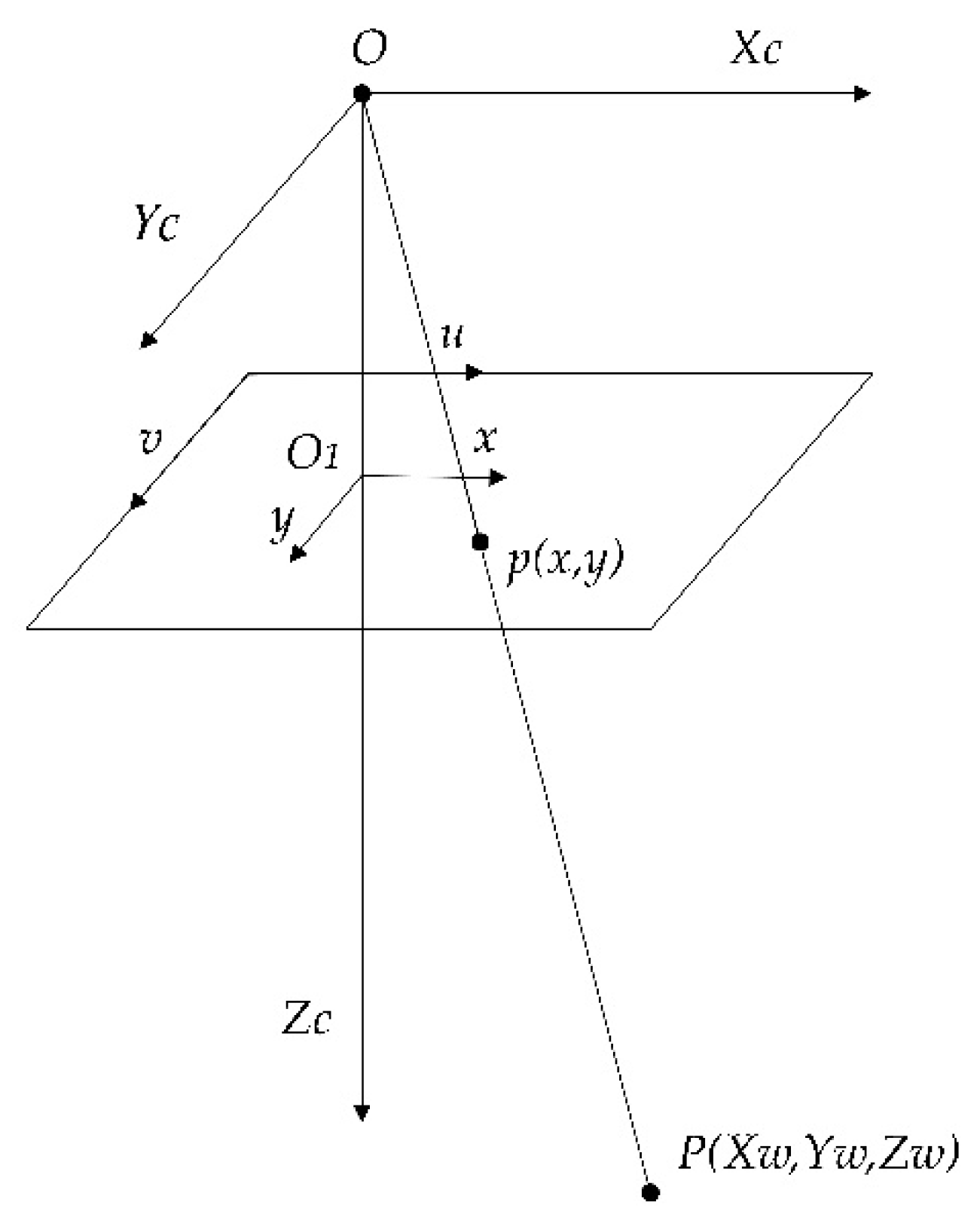
2.3. Estimation of Wheel Forward Displacement by Machine Vision
- (1)
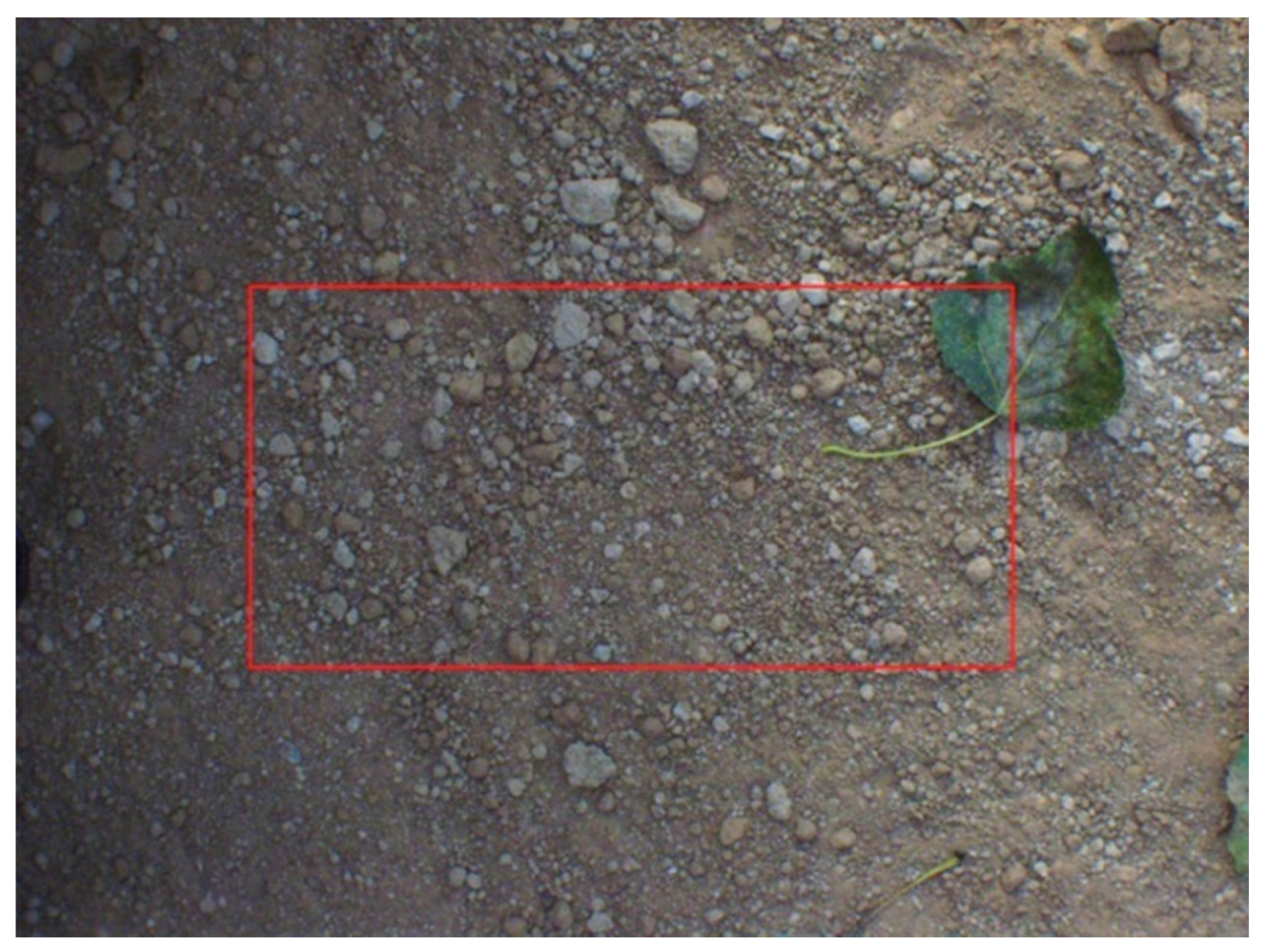
- The rectangular area is selected with the FAST corner point as the center, the moments of the rectangular area are defined by Equation (4):
- (2)
- The centroid of the rectangular area is found with these moments:
- (3)
- The FAST corner point and the center of mass are connected to obtain the direction vector, the direction of the direction vector is calculated by the following Equation (6):
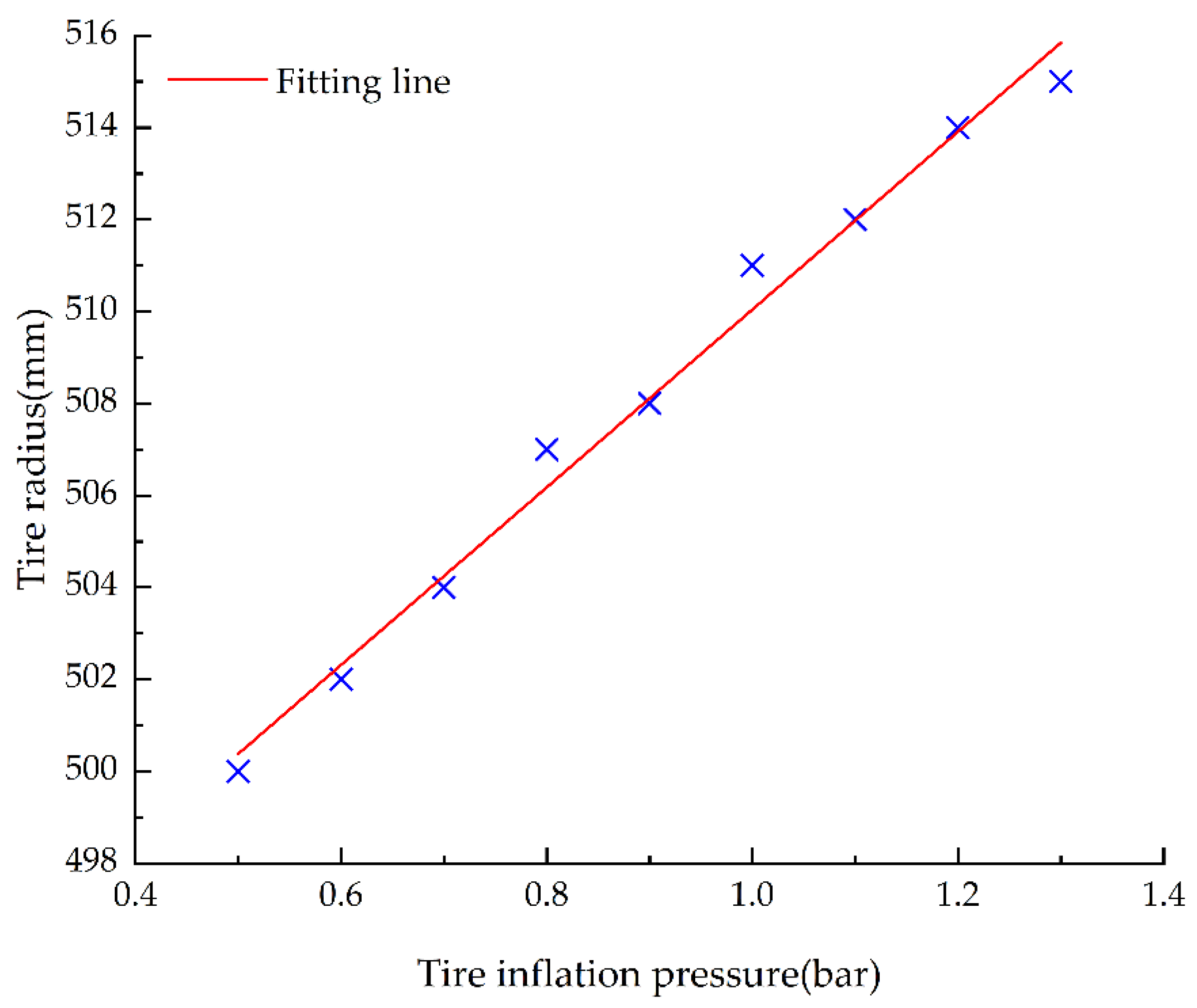
2.4. Estimation of the Tire Radius Based on Tire Inflation Pressure
2.5. Experimental Setup
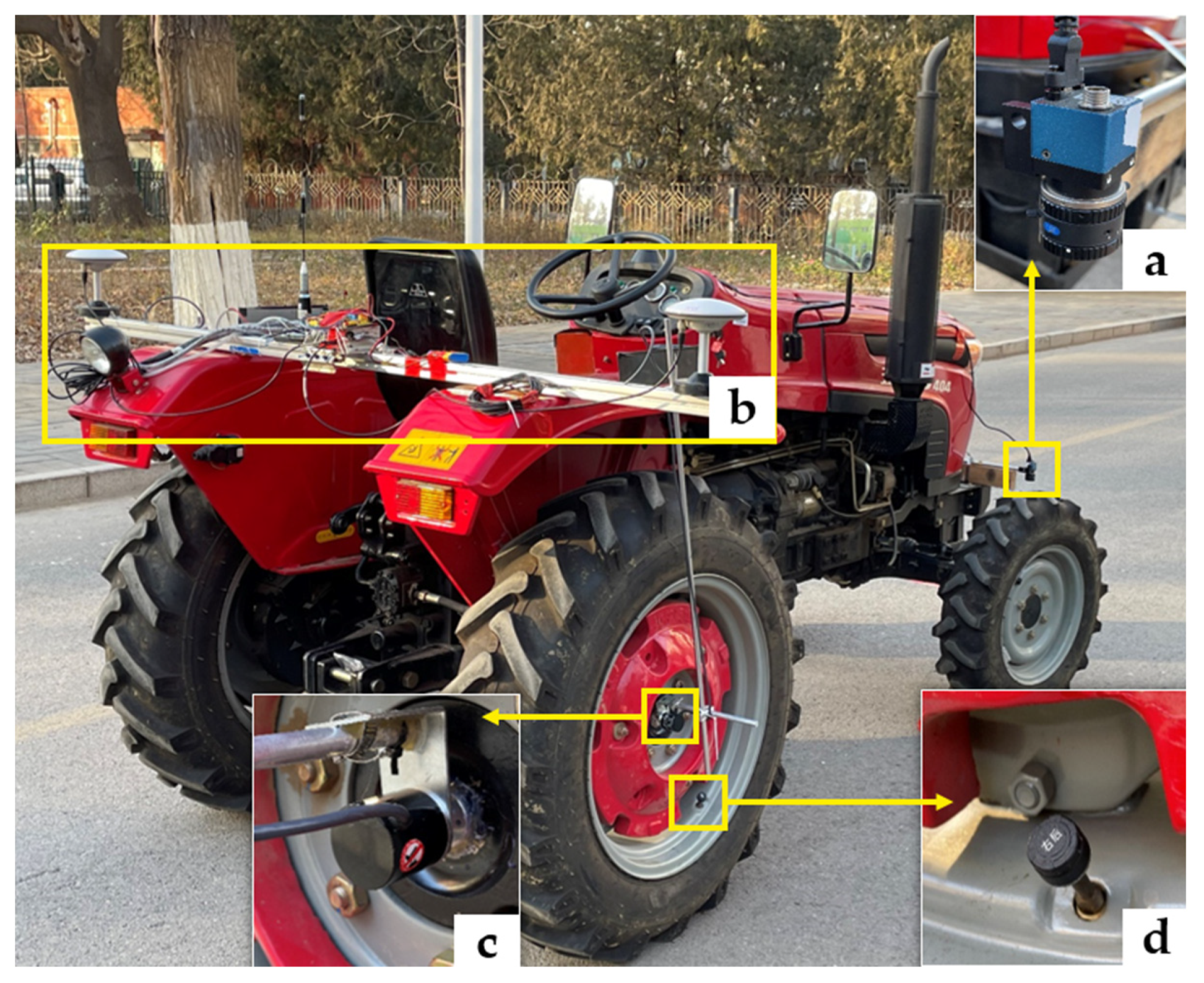
2.5.1. Platform of the Experimental Tractor
2.5.2. Experimental Environment
2.5.3. Experimental Schemes
3. Results and Discussions
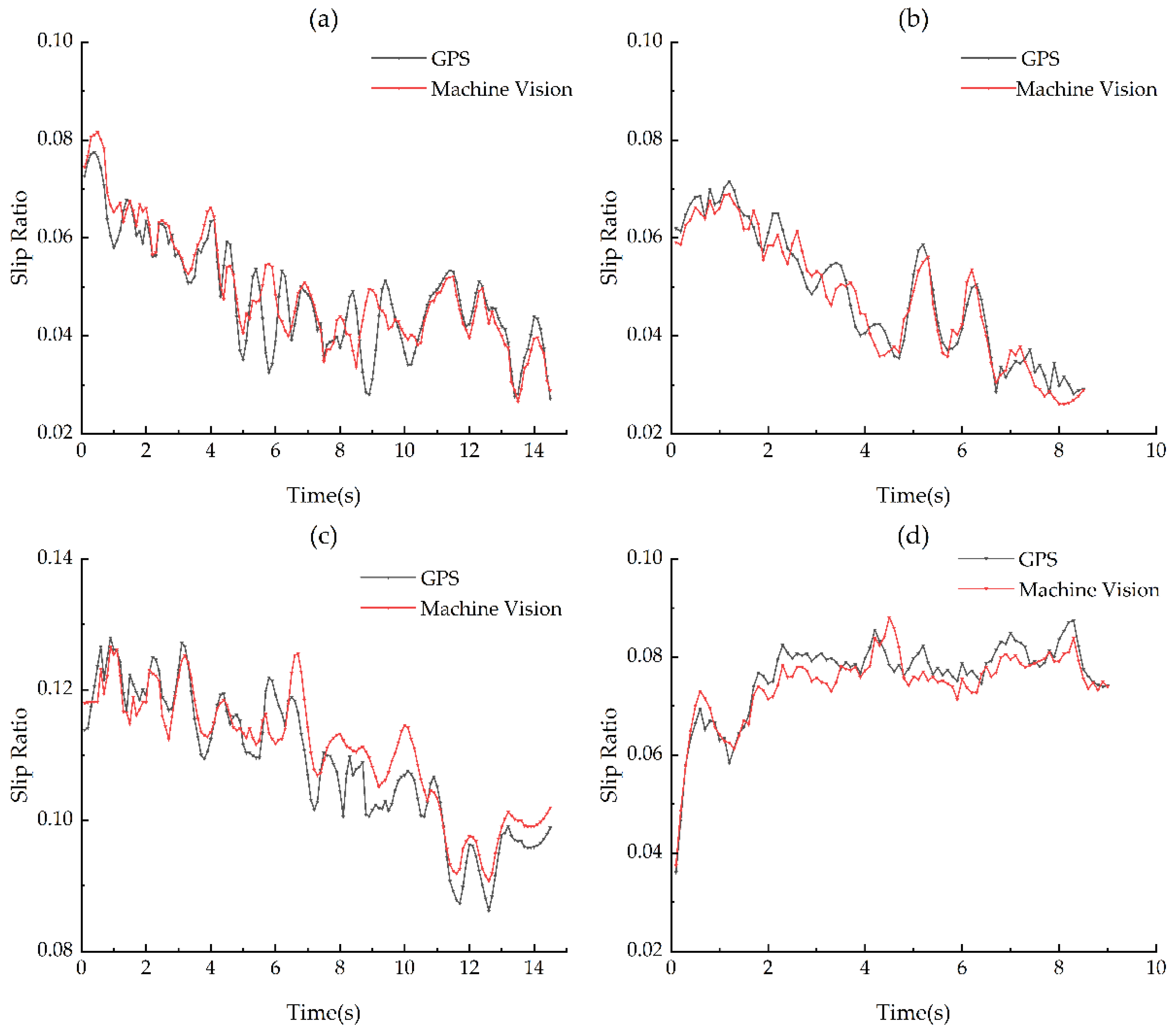
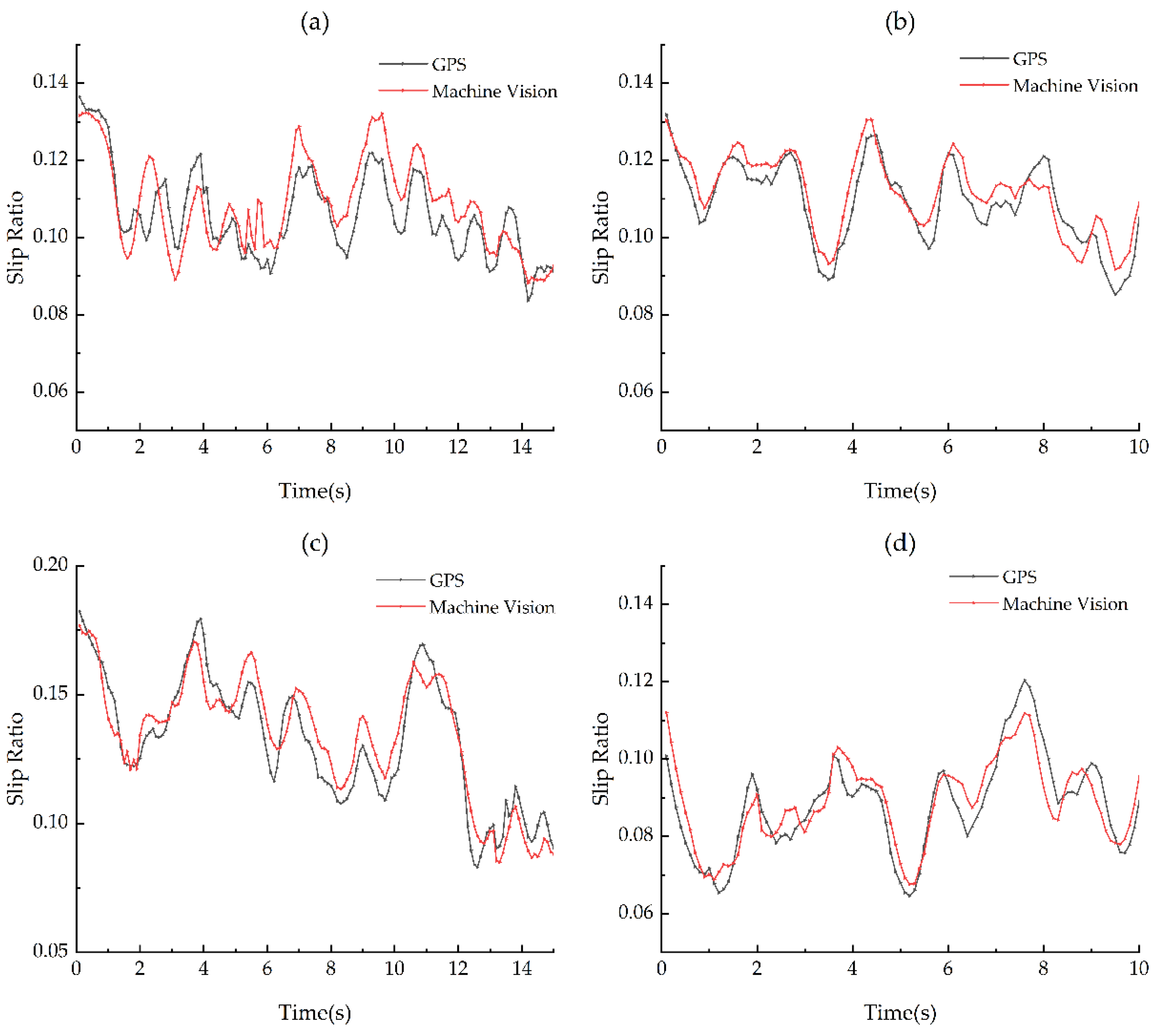
3.1. Experimental Results of Measuring the Slip Ratio for Tractor Driving Wheels
3.2. Discussions
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, B.; Jin, P.; Qiao, H.; Hayat, T.; Alsaedi, A.; Ahmad, B. Exergy analysis of Chinese agriculture. Ecol. Indic. 2019, 105, 279–291. [Google Scholar] [CrossRef]
- Goering, C.E. A century of tractor development: 1907–2007. Trans. ASABE 2008, 51, 379–383. [Google Scholar] [CrossRef]
- Żebrowski, J. Traction efficiency of a wheeled tractor in construction operations. Autom. Constr. 2010, 19, 100–108. [Google Scholar] [CrossRef]
- Zoz, F.M. Predicting tractor field performance. Trans. ASAE 1972, 15, 0249–0255. [Google Scholar] [CrossRef]
- Pranav, P.K.; Pandey, K.P.; Tewari, V.K. Digital wheel slipmeter for agricultural 2WD tractors. Comput. Electron. Agric. 2010, 73, 188–193. [Google Scholar] [CrossRef]
- Raheman, H.; Jha, S.K. Wheel slip measurement in 2WD tractor. J. Terramech. 2007, 44, 89–94. [Google Scholar] [CrossRef]
- Tompkins, F.D.; Hart, W.E.; Freeland, R.S.; Wilkerson, J.B.; Wilhelm, L.R. Comparison of tractor ground speed measurement techniques. Trans. ASAE 1988, 31, 0369–0374. [Google Scholar] [CrossRef]
- Miller, S.L.; Youngberg, B.; Millie, A.; Schweizer, P.; Gerdes, J.C. Calculating longitudinal wheel slip and tire parameters using GPS velocity. In Proceedings of the 2001 American Control Conference, Arlington, VA, USA, 25–27 June 2001. [Google Scholar]
- Bevly, D.M.; Gerdes, J.C.; Wilson, C.; Zhang, G. The use of GPS based velocity measurements for improved vehicle state estimation. In Proceedings of the 2000 American Control Conference, Chicago, IL, USA, 28–30 June 2000. [Google Scholar]
- Ward, C.C.; Iagnemma, K. A dynamic-model-based wheel slip detector for mobile robots on outdoor terrain. IEEE Trans. Robot. 2008, 24, 821–831. [Google Scholar] [CrossRef]
- Gonzalez, R.; Apostolopoulos, D.; Iagnemma, K. Slippage and immobilization detection for planetary exploration rovers via machine learning and proprioceptive sensing. J. Field Robot. 2018, 35, 231–247. [Google Scholar] [CrossRef]
- Helmick, D.M.; Yang, C.; Clouse, D.S.; Bajracharya, M.; Matthies, L.H.; Roumeliotis, S.I. Slip compensation for a Mars rover. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005. [Google Scholar]
- Nister, D.; Naroditsky, O.; Bergen, J. Visual odometry. In Proceedings of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Washington, DC, USA, 27 June–2 July 2004. [Google Scholar]
- Ding, L.; Gao, H.; Deng, Z.; Yoshida, K.; Nagatani, K. Slip ratio for lugged wheel of planetary rover in deformable soil: Definition and estimation. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 11–15 October 2009. [Google Scholar]
- Song, X.; Song, Z.; Seneviratne, L.D.; Althoefer, K. Optical flow-based slip and velocity estimation technique for unmanned skid-steered vehicles. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS, Nice, France, 22–26 September 2008. [Google Scholar]
- Song, X.; Seneviratne, L.; Althoefer, K. A vision based wheel slip estimation technique for mining vehicles. IFAC Proc. Vol. 2009, 42, 179–184. [Google Scholar] [CrossRef]
- Botha, T.R.; Schalk Els, P. Digital image correlation techniques for measuring tyre–road interface parameters: Part 2—Longitudinal tyre slip ratio measurement. J. Terramechanics 2015, 61, 101–112. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Feng, S.; Shan, H.; Wang, G. Tractor-trailer-train braking time sequence detection based on monocular vision. Adv. Mech. Eng. 2021, 13, 1–13. [Google Scholar] [CrossRef]
- Chen, J.; Jing, L.; Hong, T.; Liu, H.; Glowacz, A. Research on a Sliding Detection Method for an Elevator Traction Wheel Based on Machine Vision. Symmetry 2020, 12, 1158. [Google Scholar] [CrossRef]
- Wong, J.Y. Theory of Ground Vehicles, 4th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011. [Google Scholar]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Zhang, Z. Flexible camera calibration by viewing a plane from unknown orientations. In Proceedings of the Seventh IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999. [Google Scholar]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Resolution (pixel × pixel) | 1292 × 964 |
| Focal length (mm) | 8 |
| Spectrum | Colorful |
| Exposure (ms) | 2 |
| Frame rate (f·s−1) | 30 |
| Pixel size ) | 3.75 × 3.75 |
| Parameters | Value |
|---|---|
| Tractor model | TS404 |
| Dimensions (length × width × height)/mm | 3410 × 1500 × 2120 |
| Wheelbase/mm | 1948 |
| Minimum ground clearance/mm | 350 |
| Wheel travel system | 7.5–16/11.2–28 |
| Minimum turning radius/m | 3.3 |
| Rated power/kW | 29.4 |
| Soil Texture | Moisture Content | Cone Index (kPa) | Shear Strength (kPa) |
|---|---|---|---|
| Loam | 13.85% | 161 | 67 |
| Type of Ground | Velocity Range | Tire Inflation Pressure |
|---|---|---|
| Asphalt ground | Low velocity (0.5~1 m/s) | Low tire inflation pressure (0.6 bar) |
| Soft soil ground | High velocity (1.5~2 m/s) | High tire inflation pressure (1.0 bar) |
| Working Conditions | Mean Absolute Error | Maximum of Absolute Error | Minimum of Absolute Error | Standard Deviation of Absolute Error |
|---|---|---|---|---|
| Low velocity and low tire inflation pressure | 0.0039 | 0.0222 | 0 | 0.0042 |
| High velocity and low tire inflation pressure | 0.0030 | 0.0081 | 0 | 0.0018 |
| Low velocity and high tire inflation pressure | 0.0034 | 0.0117 | 0 | 0.0023 |
| High velocity and high tire inflation pressure | 0.0028 | 0.0097 | 0.0002 | 0.0020 |
| Working Conditions | Mean Absolute Error | Maximum of Absolute Error | Minimum of Absolute Error | Standard Deviation of Absolute Error |
|---|---|---|---|---|
| Low velocity and low tire inflation pressure | 0.0064 | 0.0199 | 0.0002 | 0.0040 |
| High velocity and low tire inflation pressure | 0.0043 | 0.0109 | 0 | 0.0027 |
| Low velocity and high tire inflation pressure | 0.0075 | 0.0185 | 0 | 0.0044 |
| High velocity and high tire inflation pressure | 0.0049 | 0.0123 | 0.0002 | 0.0030 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, S.; Wang, L.; Zhu, Z.; Mao, E.; Chen, Y.; Liu, Y.; Du, X. Measuring Method of Slip Ratio for Tractor Driving Wheels Based on Machine Vision. Agriculture 2022, 12, 292. https://doi.org/10.3390/agriculture12020292
Zhu S, Wang L, Zhu Z, Mao E, Chen Y, Liu Y, Du X. Measuring Method of Slip Ratio for Tractor Driving Wheels Based on Machine Vision. Agriculture. 2022; 12(2):292. https://doi.org/10.3390/agriculture12020292
Chicago/Turabian StyleZhu, Shaohua, Lin Wang, Zhongxiang Zhu, Enrong Mao, Yiming Chen, Yuxi Liu, and Xianxu Du. 2022. "Measuring Method of Slip Ratio for Tractor Driving Wheels Based on Machine Vision" Agriculture 12, no. 2: 292. https://doi.org/10.3390/agriculture12020292