2.1.1. Functional Design of Different Layouts
The speed equation of a simple planetary gear is expressed as a function, which is shown as the characteristic parameter
k of the planetary gear [
13].
Similarly, the torque equation of the planetary gear is expressed as a function of the characteristic parameter
k in the planetary gear in ideal conditions [
14].
where
n,
T and
k represent the rotational speed, torque and planetary row structure parameters, respectively; the subscripts
s,
r and
c represent the sun gear, ring gear and planetary carrier, respectively.
Equations (1) and (2) define a plane in a three-dimensional space. The three points belonging to the plane can be used to express the relationship of rotation speed and torque, respectively. In this study, these points are defined by selecting a reference axis. The constant speed of the reference axis is assumed to be 1, and the speed of the remaining axis is calculated when the other axis is stationary. Assuming that the planet carrier is used as a reference, Equation (1) can be represented by the three points in
Table 1.
All the null values and relative unit values are ignored in
Table 1, and the three points (
q0,
q1,
q2) can be reduced to only one point in the two-dimensional space, tracking the order used for notation:
where the first letter of the subscript of
Q is the speed of the reference shaft (planet carrier), and the second and third letters represent the speed of the corresponding ring gear and sun gear.
nr,
ns and
nc represent the rotating speed of the gear ring, sun gear and planet carrier, respectively.
The same form of expression is where
a,
b and
c represent the three components of the planetary gear mechanism. The general representation of
Q is:
where
x1 represents the speed ratio of the
b-axis and
a-axis when
ωc = 0;
y1 represents the speed ratio of the
c-axis and
a-axis when
ωb = 0; and
ωa,
ωb and
ωc represent the angular velocity of shaft the connecting the component (
a), the angular velocity of the shaft connecting the component (
b) and the angular velocity of the shaft connecting the component (
c).
The different layouts are converted, and the form of planetary gears (subscript
a b c) can be shown in six forms:
crs,
csr,
scr,
src,
rcs and
rsc [
4]. The speed and torque distributions of the six layouts is shown in
Table 2.
The twelve two-dimensional points are all expressions of different layouts, according to Equations (1) and (2). It can be seen from
Table 2 that the connection between the planetary gear shaft and the drive shaft will affect the overall transmission performance. Therefore, it is necessary to analyse the shaft connecting the different parts of the planetary gear. The three main components of the planetary gear are the sun gear, the ring gear and the planet carrier. On the system side, the functions of the shafts or the main components which they drive can be used to identify the shafts. According to the transmission characteristics of the HMCVT, the three shafts are, respectively, the shaft connected to the engine (ICE), the shaft connected to the pump-motor hydraulic system (PM) of the HMCVT and the shaft connected to the output shaft (OUT) of HMCVT.
The layout of the planetary gear train and the characteristic parameters of the planetary gear in the HMCVT have a great influence on the transmission characteristics; thus, it is of great significance to the design and selection of the planetary gear layout [
15]. According to
Table 2, the six different layouts are the functions of the planetary gear characteristic parameter
k. Based on experience, the value of the planetary gear characteristic parameter
k is between 1 and 10. Therefore, the layout characteristics are interpreted as mathematical formulas, as shown in Equations (5) and (6).
where
C represents a set of two-dimensional numbers and
represents the two-dimensional space.
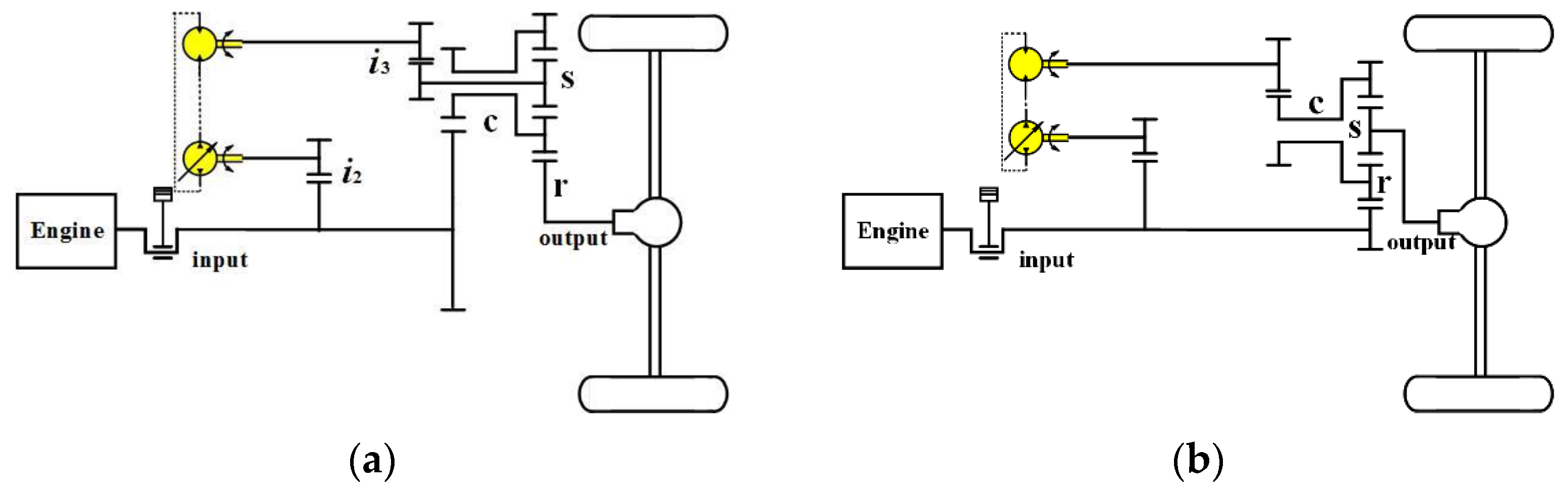
2.1.2. The Representation of the Different Layouts
In order to express the transmission characteristics of six different layouts and to provide design solutions for HMCVT, this article defines the transmission shaft which connects to the planetary gear mechanism: the input shaft of the engine is used as the reference shaft, and its speed is kept at a fixed value (
a). The shaft connected to the pump-motor hydraulic system of the HMCVT and the shaft connected to the output rear axle of the vehicle are referred to as
b and
c, respectively. Equation (4) can be expressed as:
where
x1 represents the zero-speed point, and
y1 represents the full mechanical point;
ω represents the angular velocity; the subscripts
PM,
DE and
OUT represent the pump-motor hydraulic system of the HMCVT, the diesel engine and the output shaft of the HMCVT, respectively.
According to the above connection rules, there are six different layout forms which are shown in
Table 3. The six different layouts
xyz (
scr,
src,
rsc,
rcs,
crs,
csr) can be described as the following: the output shaft of the engine is connected to
x component; the pump-motor hydraulic mechanism of the HMCVT is connected to
y component, and the output shaft of HMCVT (the input shaft of the rear axle) is connected to
z component, respectively. For example, the layout
scr can be described as follows: the output shaft of the engine is connected to the sun gear; the pump-motor hydraulic mechanism of the HMCVT is connected to the planet carrier and the output shaft of HMCVT (the input shaft of the rear axle) is connected to the ring gear, respectively.
2.1.3. Analysis of Transmission Ratio and Efficiency Characteristics in Different Layouts
vr is defined as the ratio of the output speed of the vehicle to the maximum vehicle speed.
According to Equations (7) and (8), the ratio between output speed of the vehicle and output speed of the HMCVT is shown as follows:
where
iout represents transmission ratio of vehicle output shaft;
ωRA represents the angular velocity of vehicle wheels;
ωOUT represents output the angular velocity of the HMCVT and
rw represents the radius of the vehicle wheel.
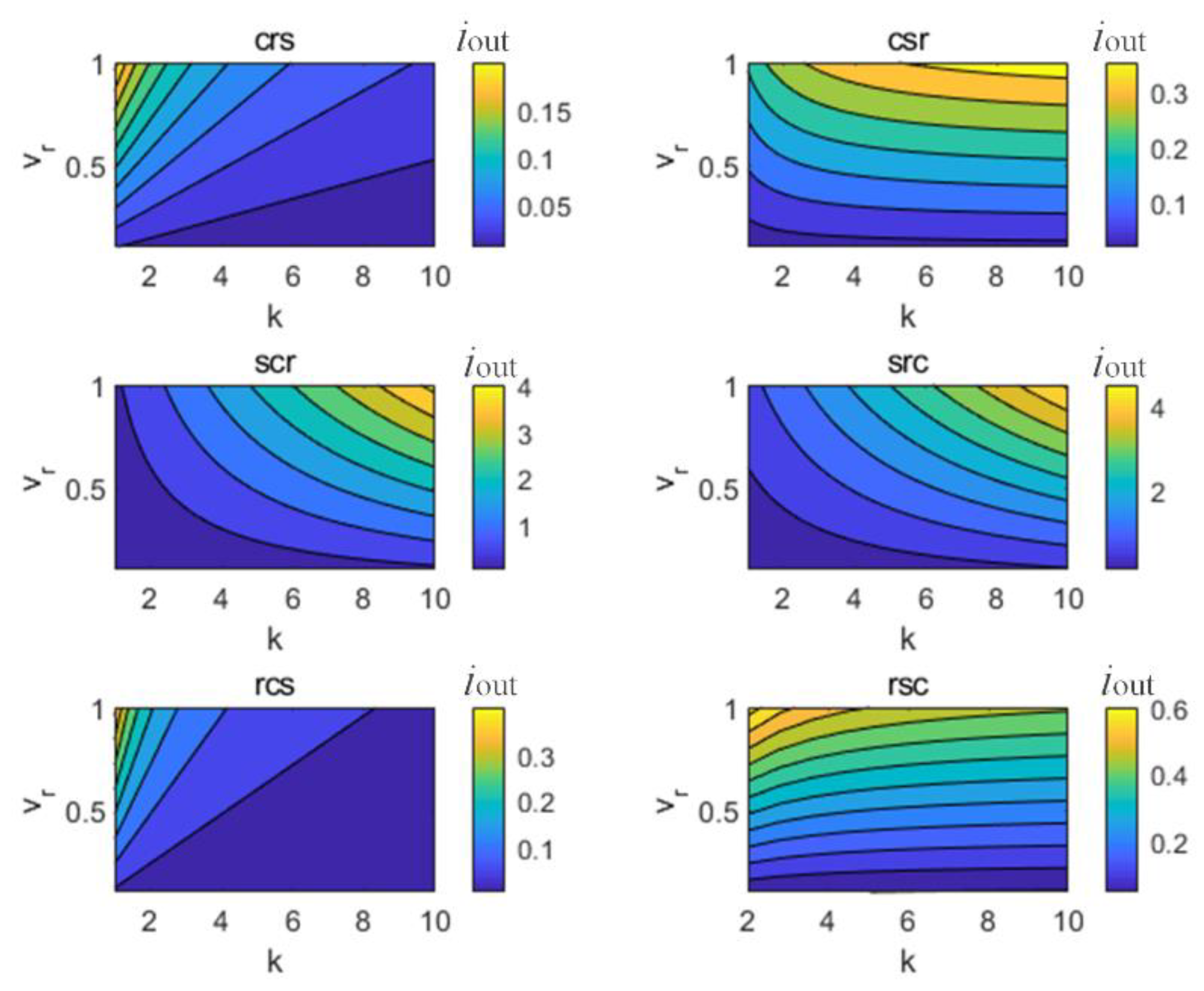
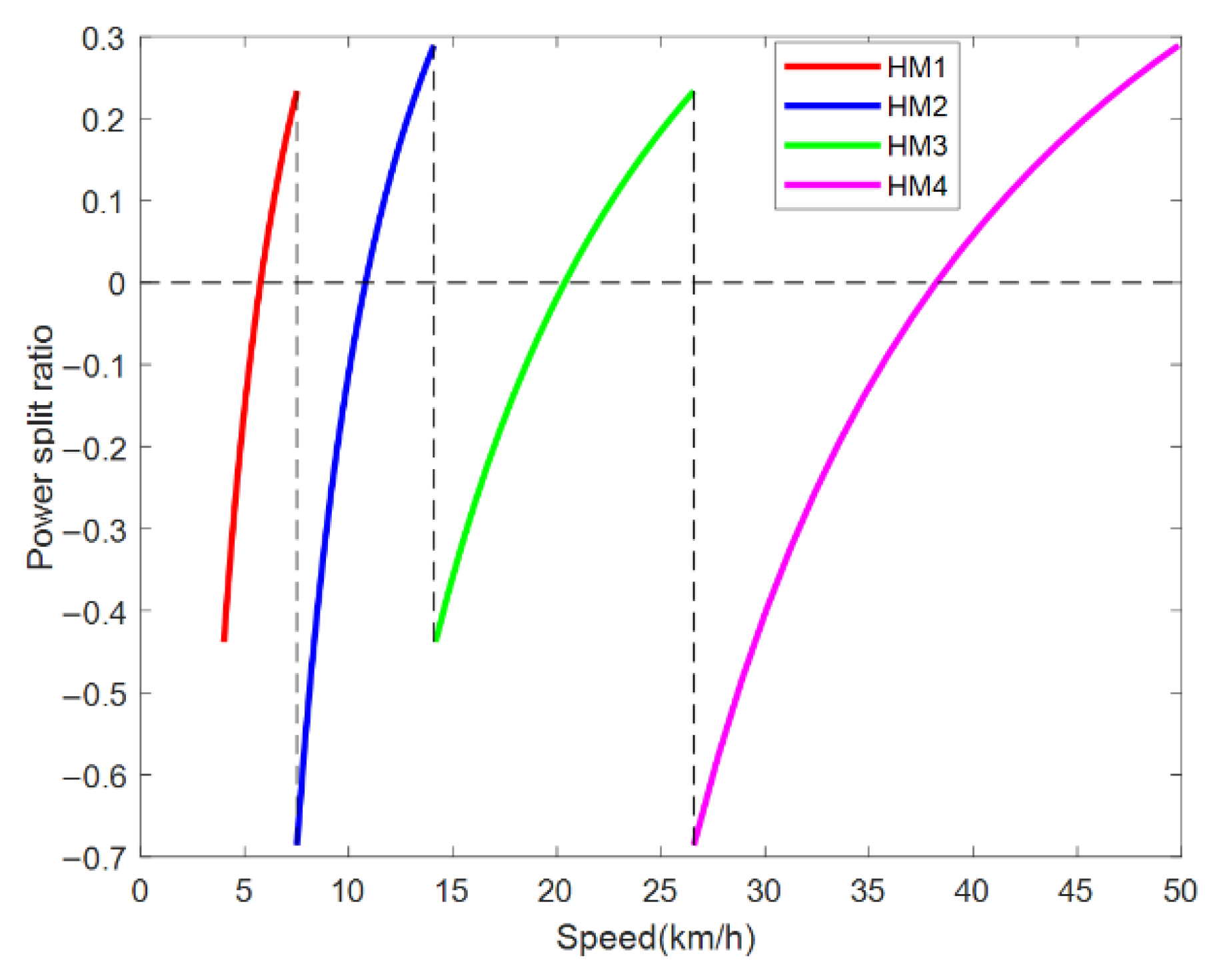
It can be intuitively seen that
iout depends on
vr and
y1. The
vr is the ratio of the output speed to the maximum vehicle speed, which ranges from 0.1 to 1. It can be seen from
Figure 1 that
iout has different value ranges for the six structural layout types of
csr,
scr,
scr,
src,
rcs and
rsc, which change continuously with the value of
k and
vr. However, the value of
iout is less than 1, because the function of the gearbox reduces the speed and increases the torque to configure the requirements of low-speed and high-horsepower for tractors. It can be seen from
Figure 1 that the transmission ratio
iout under the
scr and
src layouts are larger than the other four layouts, and they are greater than 1, so the performance when increasing the transmission torque is the worst under these two layouts. The other four layouts (
csr,
crs,
rcs and
rsc) have low transmission ratios, and their influence on the reduction of rotational speed and increasing torque are relatively noticeable. Therefore,
csr,
crs,
rcs and
rsc can each be used as one of the indicators for selecting the structure of HMCVT.
In order to select the appropriate combination mode, the influence of the structure layout on the transmission efficiency is explored. A 200-horsepower tractor was selected as the design vehicle. The parameters of the tractor are reported in
Table 4. The efficiency of the pump motor hydraulic system is calculated as follows [
16]:
where
ηP,
ηm and
ηPm represent the efficiency of the pump, the efficiency of the motor and the efficiency of the entire hydraulic system, respectively.
Cf represents the mechanical resistance coefficient;
CV represents the resistance coefficient of laminar flow;
Cs represents the leakage coefficient of laminar flow;
μ represents the hydraulic oil dynamic viscosity and Δ
PP and Δ
Pm represent the oil pressure drop of pump and motor. According to the selected axial piston variable pump-quantitative motor model:
Cs = 0.8 × 10
−9;
CV = 0.23 × 10
−6;
Cf = 0.01;
μ = 55.6 × 10
−3; Δ
PP = 8.6 MPa and Δ
Pm = 8.9 MPa.
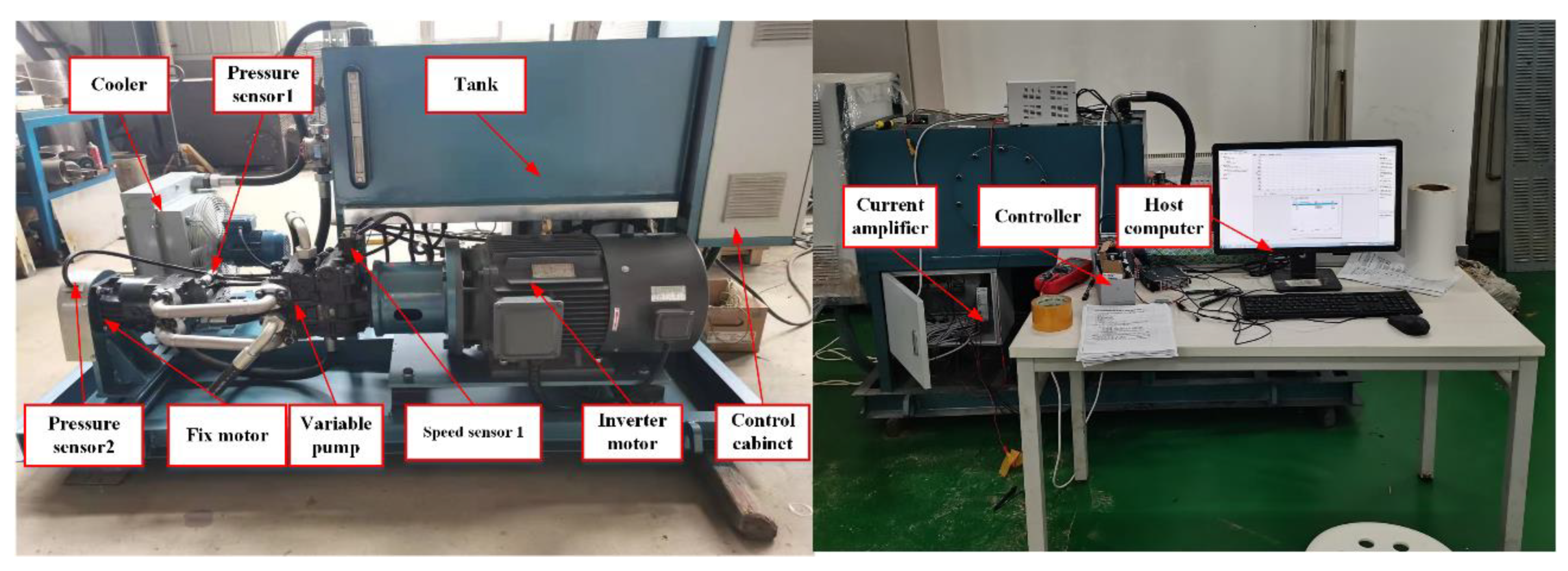
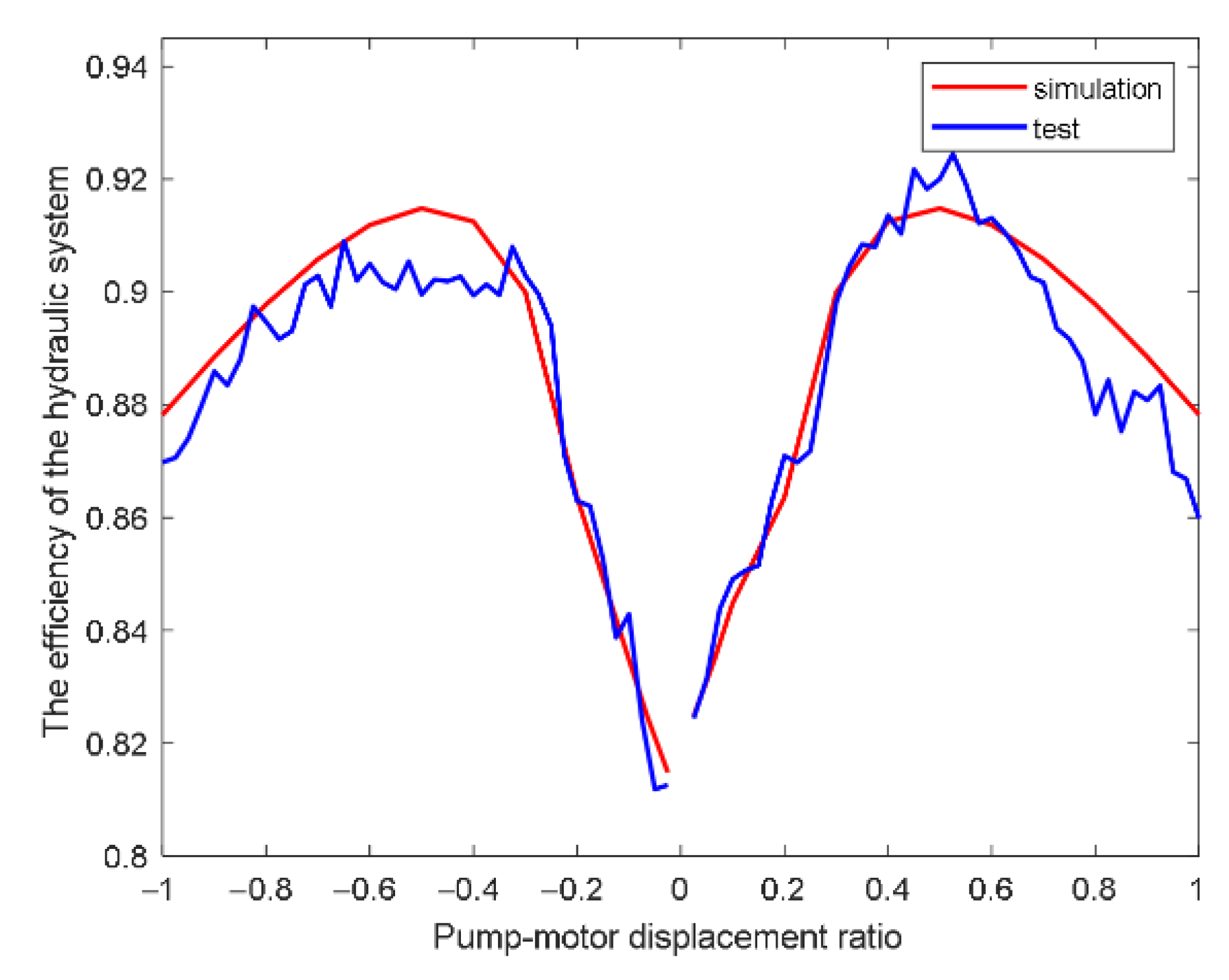
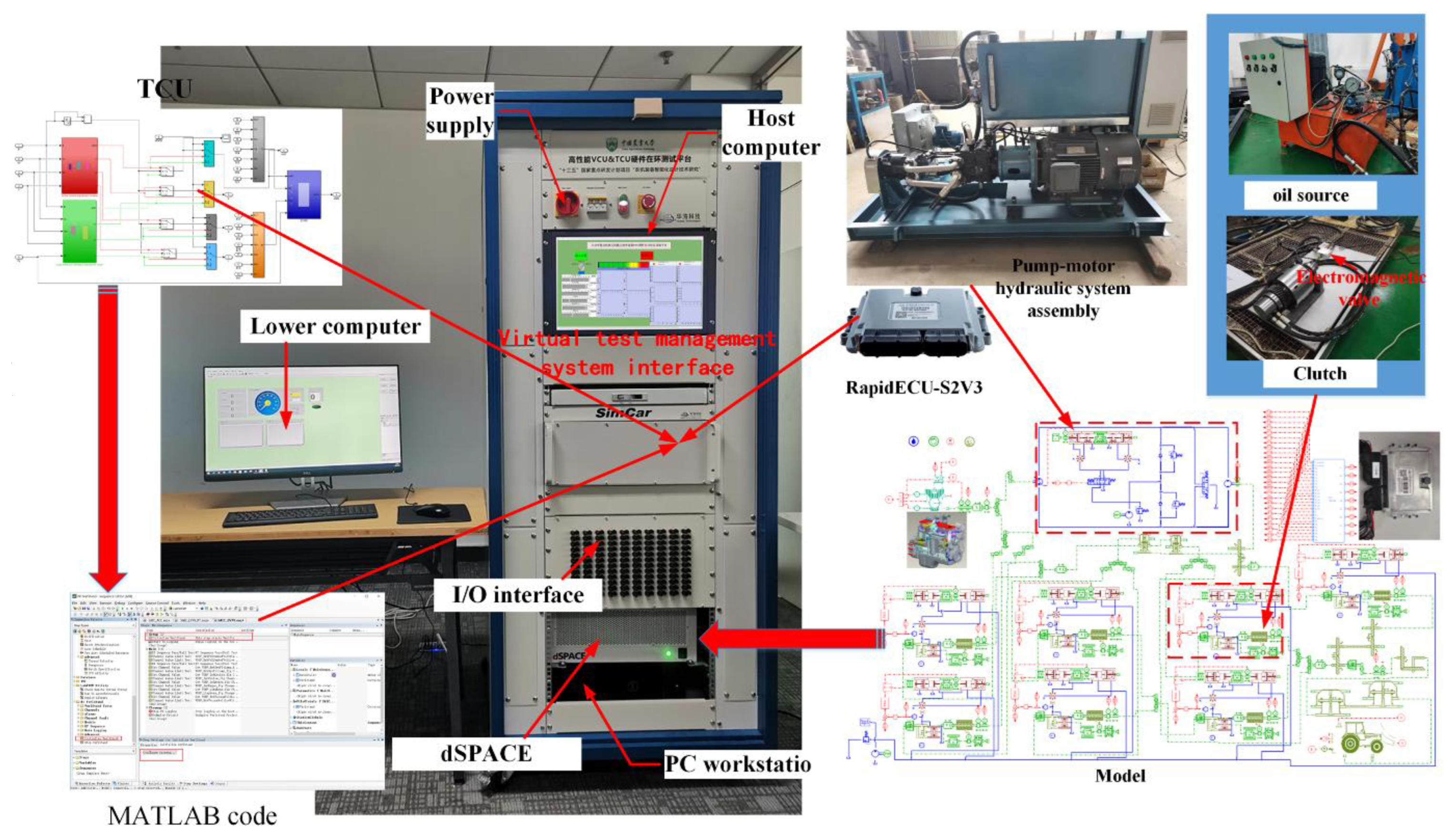
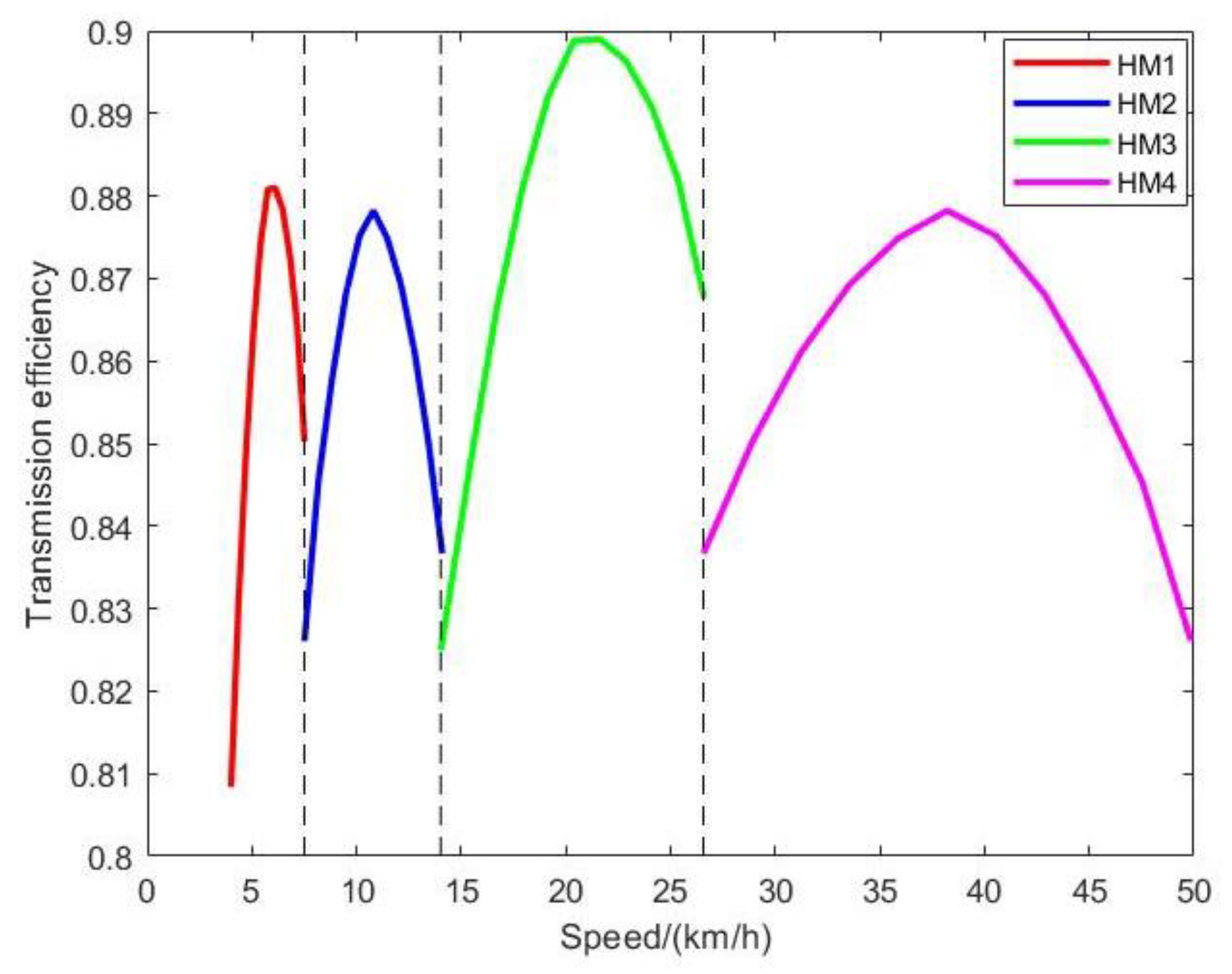
The input speed was 2100 r/min, and the range of displacement ratio was [−1, 1]. The pump-motor hydraulic system test bench was built as shown in
Figure 2. The simulation and test efficient curve of the pump-motor hydraulic system are shown in
Figure 3. The average efficiency of the hydraulic system was 86.67%. Output gear efficiency was a combination of a planetary gear reducer (
ntg = 0.985) and differential gear (
ndi = 0.975). The coefficient of viscosity loss from the planetary gear mechanism to the output shaft gear mechanism is an empirical value, ζ = 0.1 [Nm rad
−1 s]. The output efficiency can be expressed by Equation (11).
where
ntg represents the number of transmission gear;
represents the average efficiency of the hydraulic system and
ω and
T represent the rotational speed and the torque of the shaft connecting the engine, respectively.
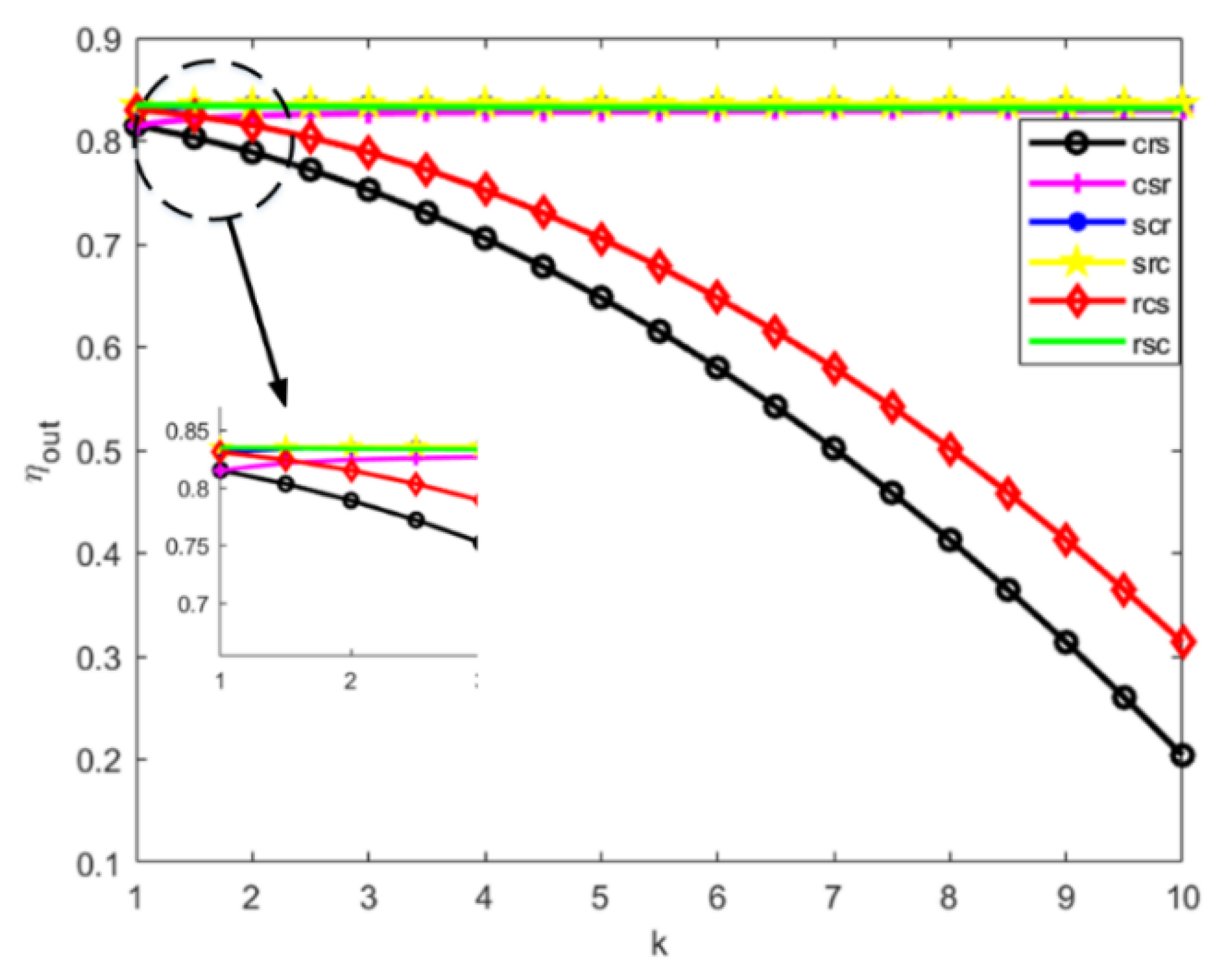
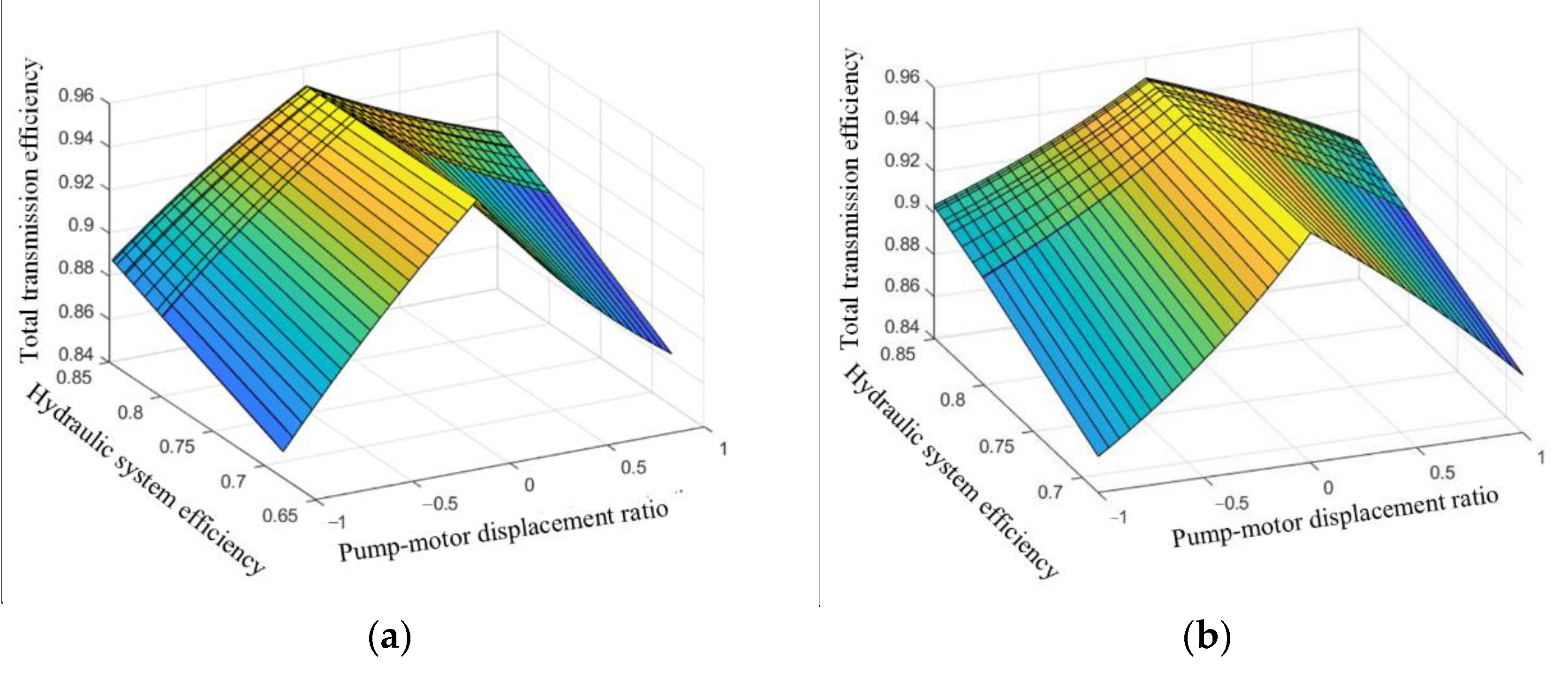
It can be seen from Equation (11) that the total efficiency is a function of
y1 and
y2, which are the functions of
k. The layouts of
csr,
src,
scr and
rsc have beneficial efficiency in the effective range with the change in
k. However, the efficiency ranges of the layouts
crs and
rcs vary greatly, and the efficiency is very low when the planetary gear parameter
k takes a more considerable role within the effective range (see
Figure 4). Therefore, the four layouts of
csr,
src,
scr and
rsc are used as the selection criteria.
The above conclusion is that the layouts of csr, crs, rcs and rsc in the speed ratio are conducive to the transmission characteristics of the HMCVT. For efficiency optimisation, the layouts of csr, src, scr and rsc are beneficial to efficient work. In summary, the layout structures of csr and rsc are more suitable for the HMCVT in terms of transmission characteristics and efficiency.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





