2.3.1. Selection of Key Parameters for Dibbler
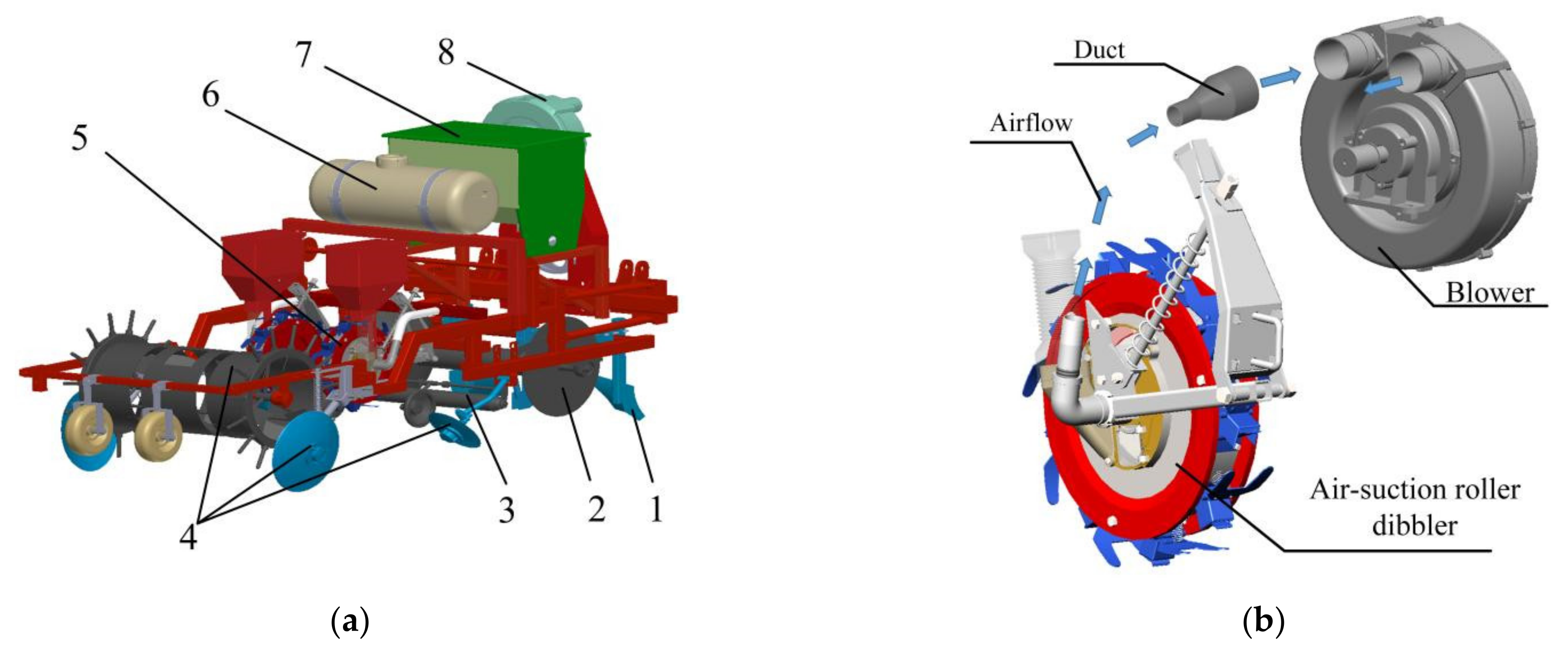
The suction tray is a key component of the air-suction roller dibbler. The seeds are transported in the dibbler mainly by the suction tray, which adsorbs the seeds and synchronously rotates. Its diameter size determines the size of the dibbler, the number of holes, and other important parameters. To ensure that the suction tray could effectively take the seeds, we analyzed the relationship between the processes of taking seeds and carrying seeds for the suction tray:
From Equation (1), we can obtain:
where
t1 is the time that the seed is in the seed-absorbing zone (s);
Cr is the arc length of the seed-taking zone (m);
vp is the linear velocity of the seed suction tray (m·s
−1);
α is the angle of rotation of the seed-taking zone (rad);
rp is the radius of the seed suction tray (m); n is the rotational speed of the seed suction tray (r·min
−1);
rk is the radial distance between the center of the hole and the edge of the seed suction tray (m).
According to Equation (2), the seed-taking time of the seed suction tray is related to the angle of the rotation of the seed-taking zone and the rotational speed of the seed suction tray, and is not related to the radius of the seed suction tray. The radius of the seed suction tray of the seeding device is generally 40–130 mm [
25], and in this study, the diameter of the seed suction tray was 100 mm. According to the design structure of the dibbler, the parameter relationships are satisfied as follows:
where
v is the forward speed of the unit (m·s
−1);
T is the operating time of the planter (s);
l is the peanut spacing (mm);
N is the number of seed grains per circle;
z is the number of seed-suction tray holes;
αT is the center angle of the two adjacent holes (°).
According to the
n,
v, and
l, the number of seed-suction tray holes (
z) is 9, and the center angle of the adjacent holes (
αT) is 40°. We present the internal structural parameters of the dibbler in
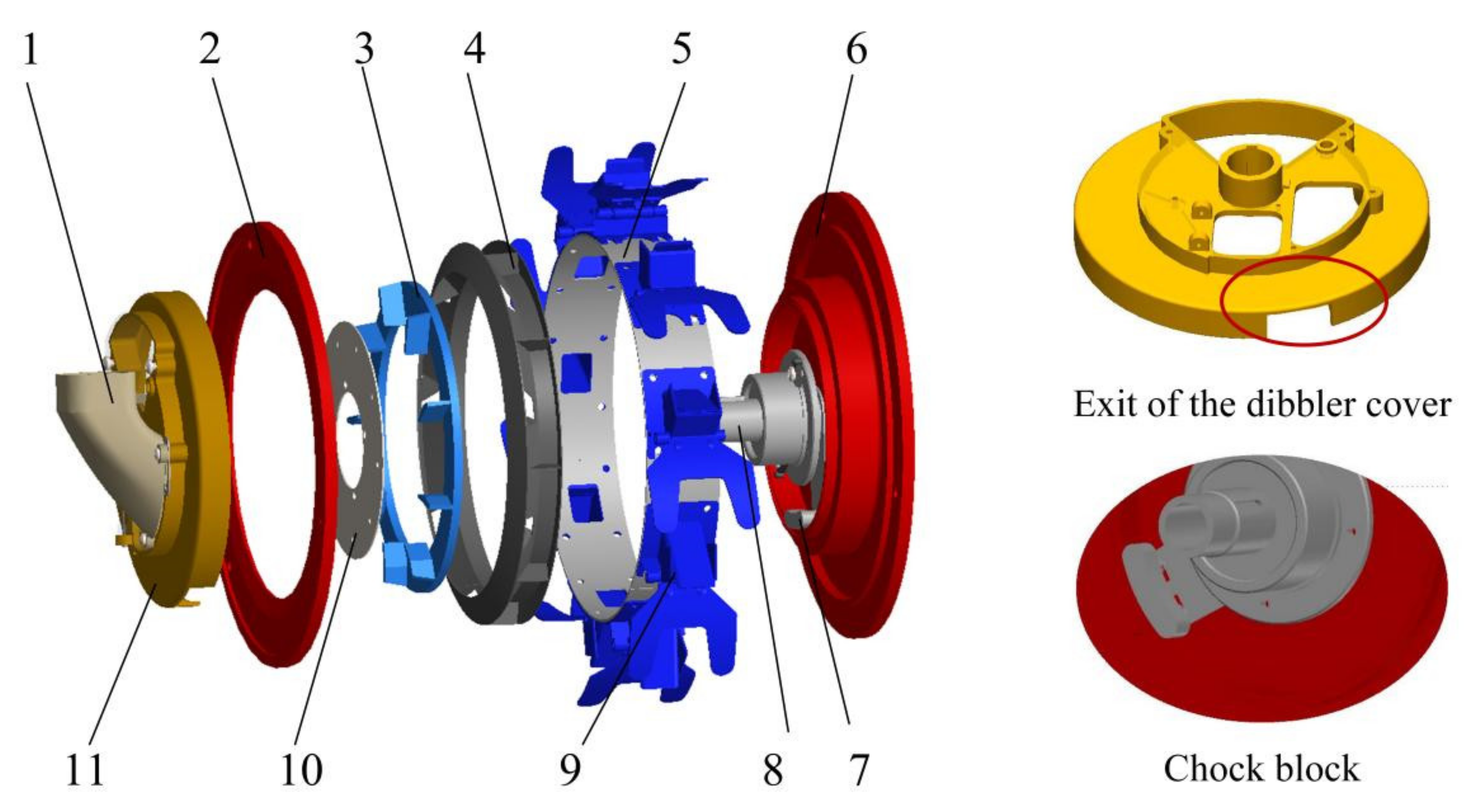
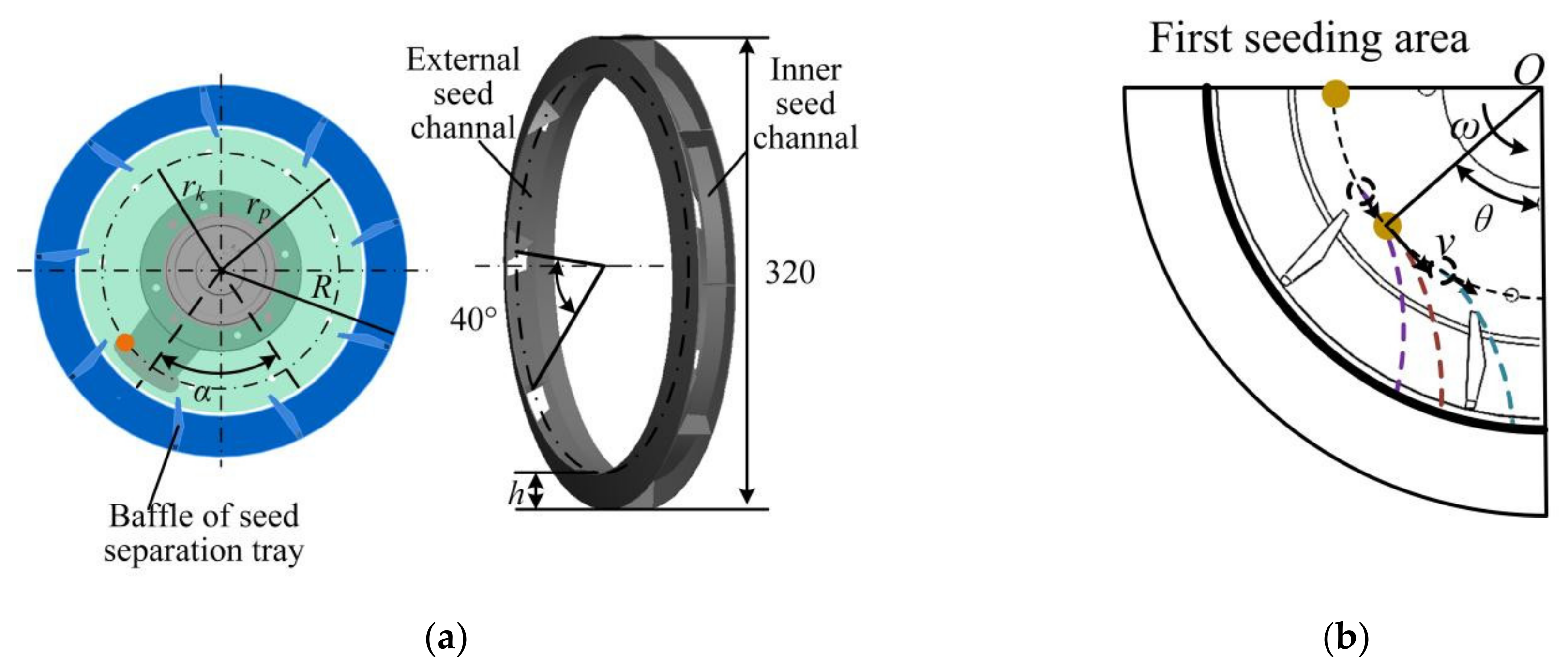
Figure 3a: the distance from the center of the seed-suction tray hole to the center of rotation is 82 mm; the radius of the seed separation tray is 128 mm; the diameter of the seed-guiding mechanism is 320 mm; the height of the seed channel is 25 mm; the interval of the baffle inside the seed-guiding mechanism is 40°; the radius of the dibbler side plate is 184 mm. We present the seeding trajectory under different installation angles of the chock block in
Figure 3b. As the installation angle of the chock block changes, the seeds that fall to the edge of the dibbler cover are shifted. Assuming that the seeds fall to the edge of the cover at the lowest point, we can obtain:
where
θ is the angle between the line between the feeding point and the center of rotation and the normal;
g is the acceleration of the gravity (m·s
−2);
t2 is the time of seed drop to cover (s); and
R is the seed separation tray radius (mm).
Thus, the IACB directly affects the seeds’ seeding trajectory and contact state with the seed separation tray and dibbler cover. The common IACB for air-suction dibblers ranges from 30° to 60°.
2.3.2. Analysis of Seed-Feeding Process
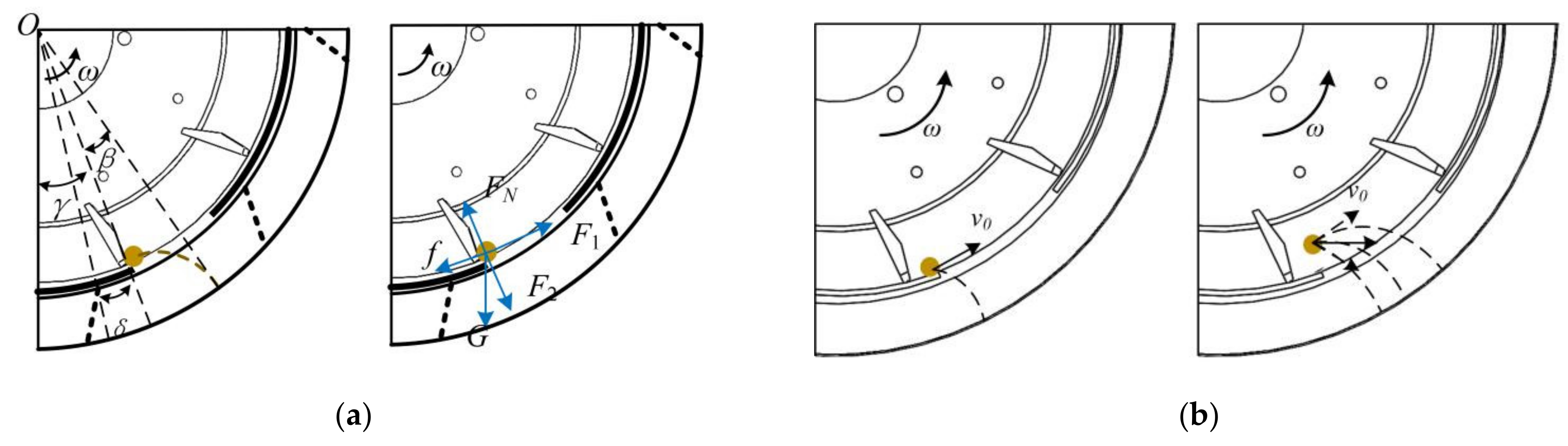
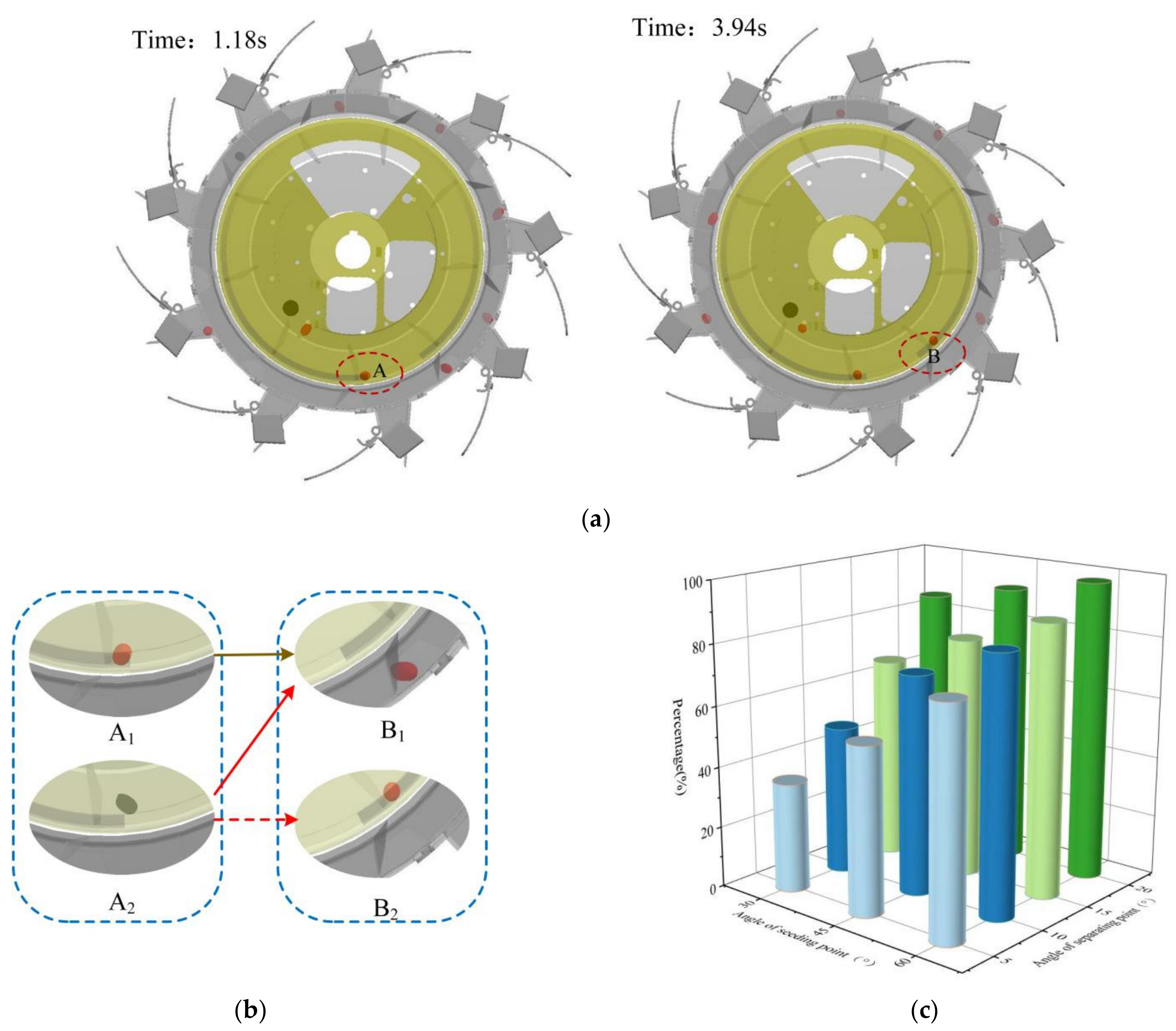
When the peanut seeds enter the seed-guiding mechanism, it is mainly in two forms. The seeds leaving the dibbler cover in contact with the baffle of the seed separation tray
Figure 4a is the most common form in the seed-feeding process. We present a depiction of the seed leaving the dibbler cover in a noncontact state with the baffle of the seed separation tray in
Figure 4b. At this time, the seed-velocity direction is more complicated, making it difficult to maintain stability. This is because the seeds are not subjected to the continuous thrust of the seed separation tray, which makes it difficult for them to maintain a constant circular motion along the edge of the cover.
The trajectory of the seed separation from the dibbler-cover phase is generally similar in the contact-separation mode, and the initial position of the seed separation is the lowest throwing point. The direction of the seed movement is perpendicular to the line between the lower edge of the dibbler-cover opening and the center of rotation.
γ is the installation angle of the dibbler cover (the angle between the initial velocity and horizontal direction), and the initial velocity (
v0) is approximately equal to the linear velocity of the edge of the seed separation tray:
where
ω is the angular velocity of the seed dispenser (rad·s
−1).
The seeds are in uniform linear motion in the horizontal direction when the seeds are thrown and in the vertical direction to perform the free-fall motion. The time required for the seed to drop from the edge of the opening of the dibbler cover to the seed-guiding mechanism is
t3. Ignoring the radius of the seed, the horizontal and vertical directions of the motion-trajectory equation are as follows:
where
x is the horizontal displacement in time (
t3) (mm);
y is the vertical displacement in time (
t3) (mm).
After the seed touches the wall of the seed channel of the seed-guiding mechanism, the separation is completed. The height of the seed channel of the seed-guiding mechanism is
h. The rotation angle of the dibbler is the minimum angle (
β) required during the seed separation from the dibbler-cover phase when the seed directly falls to the bottom of the seed channel:
The number of duckbills in the dibbler is nine, and the angle between the adjacent baffles in the seed channel is 40°. In order to avoid the seeds colliding with the baffles, the seed-guiding-mechanism installation angle (
δ) needs to meet the following relationship:
From Equation (8), the seed-guiding-mechanism mounting angle is related to the dibbler speed and dibbler-cover mounting angle when the height of the seed channel of the seed-guiding mechanism and the diameter of the seed separation tray are determined. To avoid the interference of the top part of the baffles, we selected 10° for the δ. According to the preliminary test, the seed-feeding trajectory is more stable in the range of [5°, 20°] for the dibbler-cover mounting angle.
To study the law of the seed movement in the initial stage of the seed leaving the dibbler cover and to determine the contact state between the seed and the baffle of the seed separation tray, we performed a mechanical analysis of the seeds that were detached from the edge of the dibbler cover. The equation of the equilibrium of the forces on the seeds is as follows:
where
F1 is the thrust force of the baffle on the seed (N);
FN is the support force of the seed by the cover (N);
F2 is the centrifugal force on the seed (N);
G is the gravity of a single peanut seed (N);
f is the friction force of the cover on the seed (N);
μ is the coefficient of the friction between the dibbler cover and seed.
From Equation (9), we obtain:
According to Equation (9), the thrust force of the baffle of the seed separation tray on the seed is determined by the γ under the condition that the radius of the seed separation tray is determined, and the thrust force of the baffle of the seed separation tray on the seed gradually increases with the decrease in the γ. In the initial stage of seed-cover separation, the contact between the seeds and the baffle of the seed separation tray depends on the force between them. When F1 = 0, the seeds are separated in a noncontact manner; when F1 > 0, the seeds are separated in a contact manner. The greater the interaction force between the seeds and the baffle of the seed separation tray, the easier it is for them to maintain contact. The seeds can smoothly enter the seed-guiding mechanism in their separation from the dibbler-cover phase and continue to move along the seed channel to determine whether the seed delivery is qualified. Thus, the separation mode directly affects the seed-delivery performance of the dibbler.
In the noncontact separation process, the collision between the seed and the baffle is the main reason to reduce the seeding performance; on the contrary, when the seed is separated from the cover by contact separation, its initial velocity direction and magnitude are basically the same, and the trajectory is more stable. The vibration caused by unstable ground conditions during field operation increases the number of noncontact separations. To achieve the goal of a stable seeding trajectory and reduced noncontact separations, we need to start with the impact of the IACB and IADC on the separation.
2.3.3. Simulation Test
In order to derive the influences of the IACB and IADC on the trajectory of the seed-feeding process, we selected EDEM simulation software (DEM Solutions Limited, Edinburgh, UK) for the simulation analysis. We selected the peanut seeds from HuaYu 25 (SAAS, Jinan, China). We measured the average lengths and circumferences of the 100 seeds at 14.44 and 8.99 mm, respectively. We built the peanut-seed model, dibbler model, and seed-collection box in SOLIDWORKS software (Dassault Systemes S.A, Waltham, MA, USA). We imported the model into EDEM software in the STEP format and built a particle factory inside the dibbler model. We present the models in
Figure 5.
Considering the smooth and nonadhesive peanut seed surface, the Hertz–Mindlin contact model was used for the simulation tests. The seed and material parameters and seed-material contact parameters were set with reference to the literature [
26]. We set the simulation parameters as shown in
Table 1. When the machine’s forward speed is 4 km·h
−1, the rotation speed of the dibbler is 0.88 r·s
−1, and the initial velocity of the seed-feeding point is 0.45 m·s
−1. The velocity direction is perpendicular to the line connecting the center of the particle factory and the center of rotation. The number of seeds per lap of the dibbler is nine, and so the number of seeds generated per second in the pellet plant is 7.95. Finally, we set the fixed time step to 7.3 × 10
−6 s.
2.3.4. Bench Test and Evaluation Methods
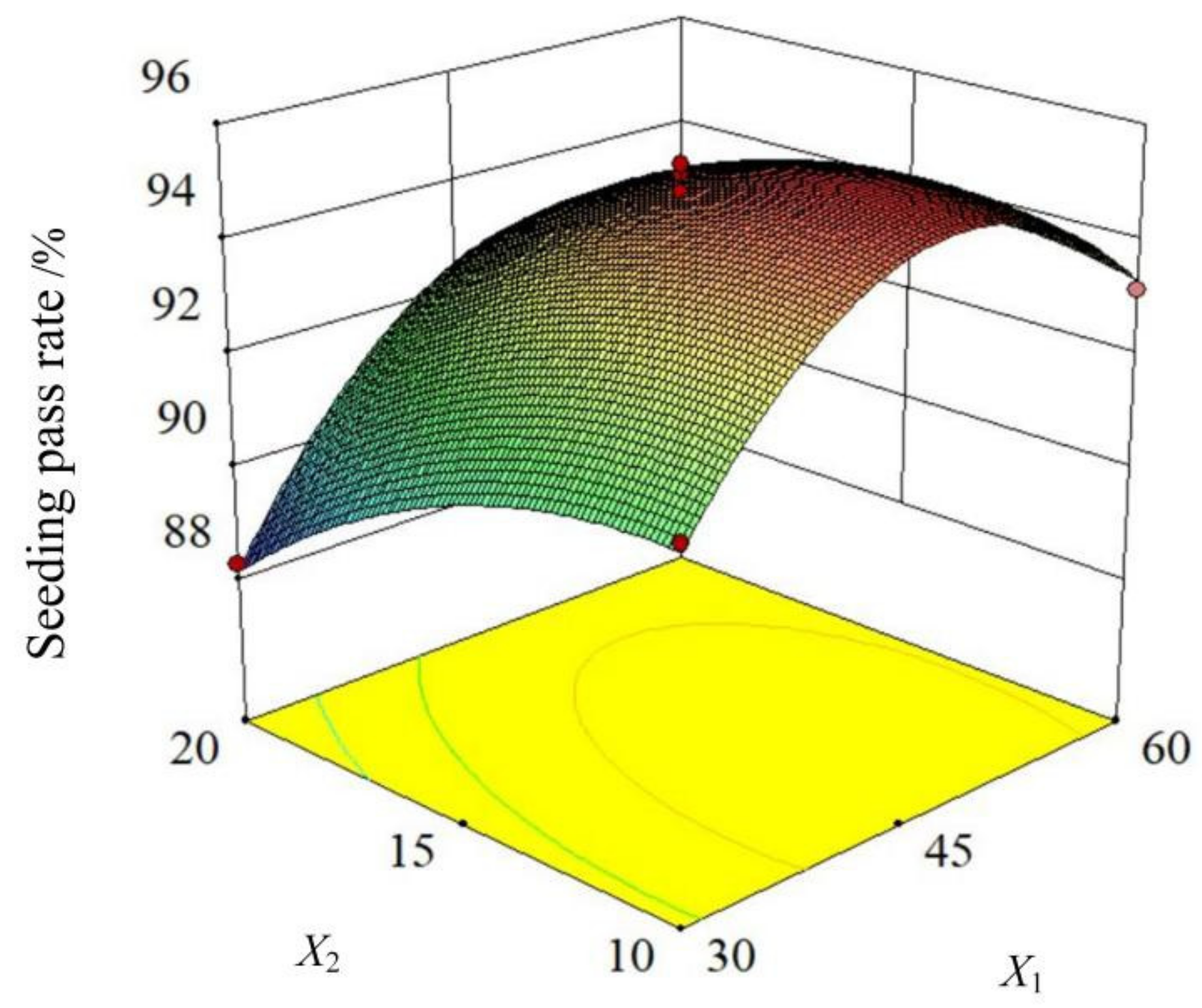
In order to analyze the factors that affect the seeding pass rate, we established the following bench test. The bench test was designed as an orthogonal experiment based on the Box–Benhnken test design principle. We tested a sample of one hundred peanut seeds with a mass of 61.3 g and a mass moisture content of 13.15%. We conducted the test to study the seed-feeding performance of the dibbler by using the IACB and IADC, and the forward speed as the factors, setting the forward speed of the dibbler to 3–5 km·h
−1, according to the seeder operation, setting the IACB to 30°–60°, according to the installation parameters of the dibbler, and setting the IADC to 10°–20°. We present the codes in
Table 2, in which the codes
X1,
X2, and
X3 represent the IACB, IADC, and forward speed, respectively.
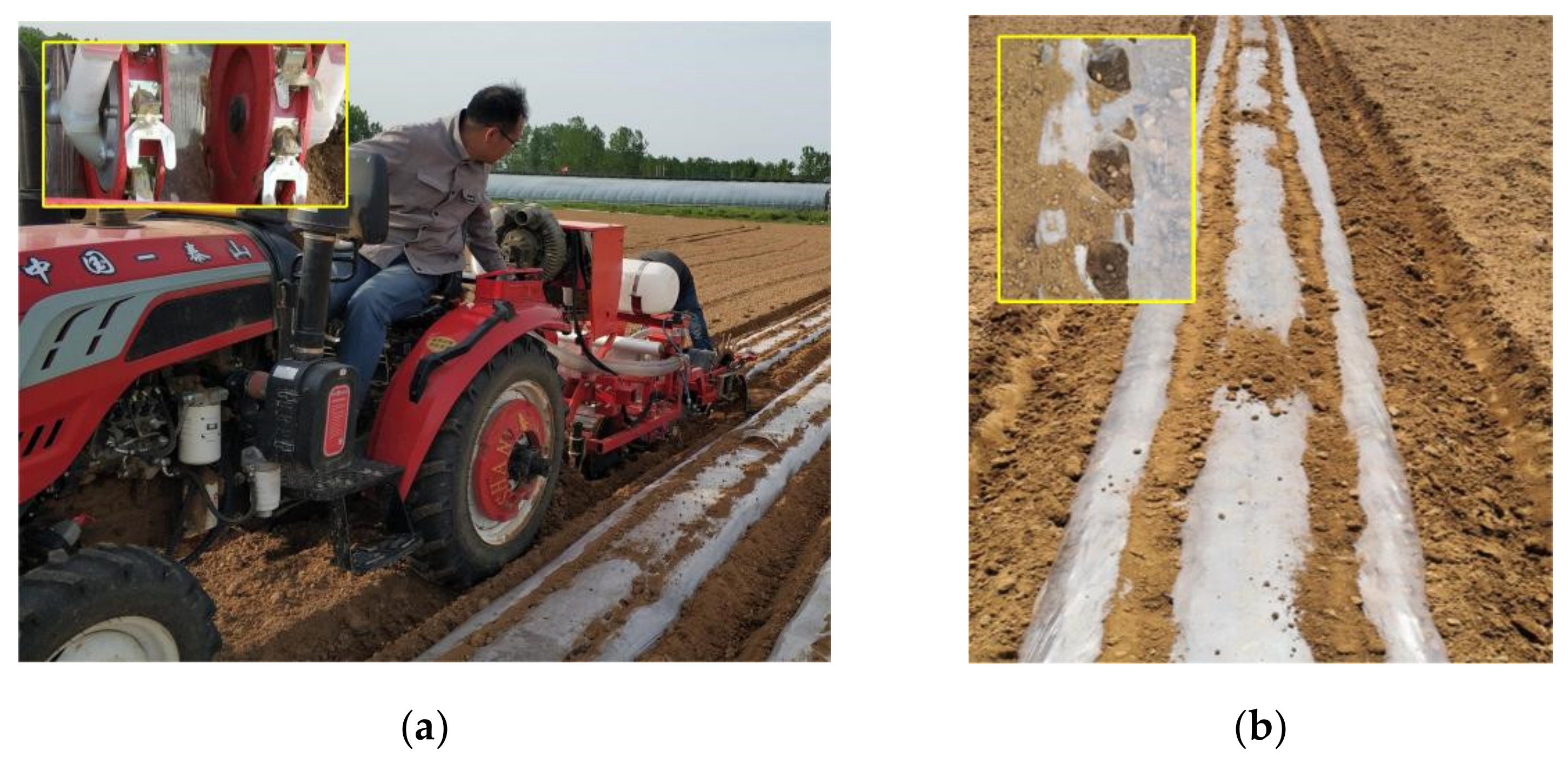
We present the seeding bench test in
Figure 6, located at the Huang Huai Hai Key Laboratory of Modern Agricultural Equipment, the Ministry of Agriculture and Rural Affairs. We recorded the number of seeds passing through the sensor-monitoring area, where we installed an infrared alignment sensor at the exit of the dibbler cover. According to the GB/T 6973-2005 single-grain seeder test method [
27], we designed 17 groups of experiments, and we used the seeding pass, missed seeding, and reseeding rates as the test indexes. We repeated each group of experiments three times to obtain the average values.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}