1. Introduction
The pig industry has always been the pillar of China’s livestock industry. Pig and pork products play a key role in food security and nutrition strategies around the world. The health situation of pigs determines the development and economic benefits of pig farming [
1], and the clinical or subclinical signs of most pig diseases are often associated with abnormal pig behavior before the diseases are found. Therefore, the monitoring and analysis of pig activity, diet, and other behaviors can help to quickly understand the health condition of pigs [
2,
3]. Currently, the manual monitoring pig behaviors is a management method for pig farms, and it requires a lot of labor and is time-consuming and inefficient. Another method of monitoring pig behavior by wearable smart devices, such as ear tags using RFID wireless radio frequency technology, which can avoid the defects of manual monitoring, usually irritate the pig and reduce the welfare of the pig [
4]. In addition, information technology tools have become an important method for the development of modern agriculture. For the past few years, deep-learning-based techniques have been adopted to achieve excellent performance in many fields, such as image recognition [
5,
6], natural language process [
7,
8], and so on [
9,
10]. Thus, it is significant to detect abnormal pig behavior quickly and accurately using computer vision technology at a low cost and no contact to achieve intelligent pig farming [
11].
Research has already begun to use automated surveillance techniques to observe pig behavior for the early detection of potential health or welfare problems, such as the a pig’s daily behavior [
12] and eating and drinking behavior [
13,
14]. This suggests the feasibility of using computer vision technology for the daily differential behavior monitoring of pigs. Some researchers have implemented livestock behavior monitoring through MOT techniques. For example, a CNN method was developed to classify different types of social behaviors among preweaning piglets [
15]. Two deep-learning-based detectors combined with tracking processes were developed to identify pig postures and drinking behaviors of group-housed pigs [
16]. A probabilistic tracking-by-detection method was proposed, which first used a fully convolutional detector to detect visible key points of individual pigs and then tracked individual animals in a group setting [
17]. A deep-learning-based pig posture and tracking algorithm were designed to measure those behavior changes in an experimental pig barn at different greenhouse gas (GHG) levels [
18]. However, pig behavior detection and tracking still face some difficulties, such as target occlusion, varying light, overlapping, and error IDs of tracks in tracking [
19,
20]. Therefore, to improve the detector and tracker performance, advanced detectors and MOT methods are being introduced to pig behavior tracking applications.
In terms of target detection and classification, anchor-based and anchor-free detectors are widely used for object detection and classification applications. The anchor-based detectors are partitioned into one-stage and two-stage categories, and anchor-free detectors have developed rapidly in the past two years. One-stage algorithms are dominated by the YOLO series [
21]. Two-stage algorithms, such as Faster R-CNN [
22], are popular. Considering the optimal speed and accuracy trade-off, this study chose the YOLO v5s algorithm as one of the target detectors. The anchor-free detectors include the CornerNet [
23], CenterNet [
24], and YOLOX [
25] algorithms, and so on. Among them, YOLOX adopted advanced detection techniques, i.e., decoupled head and strong data augmentation to achieve state-of-the-art results and won 1st place in the Streaming Perception Challenge (Workshop on Autonomous Driving at CVPR 2021) using a single YOLO-L model; therefore, YOLOX-S was chosen as another of the target detectors. In addition, this study compared the performances of YOLO v5s and YOLOX-S on pig detection and behavior classification.
In terms of MOT, MOT has been a longstanding goal in computer vision. The task of MOT is largely divided into locating multiple objects, maintaining their identities, and yielding their trajectories given an input video [
26]. Most existing MOT frameworks can be grouped into three sets, Tracking By Detection (TBD), Joint Detection Embedding (JDE) [
27], and MOT based on the attention network [
28]. Among them, TBD first adopted the detector to output the detection result and then used the Kalman filter and Hungarian algorithm to accomplish target tracking tasks, such as SORT [
29] and DeepSORT [
30]. The performance of TBD highly depends on the performance of the employed object detector. The JDE framework developed appearance representation in detection and association tasks as multitask learning [
27]. The MOT algorithms based on attention mechanisms are TransTrack [
28] and TrackFormer [
31], both of which are efforts to apply a Transformer to the MOT method. With significant improvements in the performance of target detectors based on deep learning, DeepSORT has become a simple and efficient MOT method with high accuracy at high speeds. In addition, Deep SORT was found to have a runtime speed of 25–50 FPS using modern GPUs [
30]. Thus, DeepSORT was considered as our basic tracking model.
Accurately tracking individual pigs in real farming scenarios remains a challenging task due to the following issues: (1) lack of public dataset annotation of group-housed pigs similar to MOT20 [
32] datasets used for all MOT frameworks; (2) most of the detection algorithms are sensitive to variable lighting conditions and the occlusions of pigs in a commercial environment; (3) the error pig IDs in the tracking due to the variable farm environment and overlapping of one pig from another. To tackle these challenges, some works have proposed to develop the public dataset annotations of group-housed pigs. For example, the dataset annotations of group-housed pigs were presented [
19]; however, it annotated the keys of pigs and was not suitable for mainstream pig behavior tracking algorithms. Due to the lack of public dataset annotation of growing pigs similar to MOT20, there are few studies on tracking pig behavior long-term (over an hour) and avoiding error IDs in pig tracking by using advanced tracking algorithms, such as DeepSORT, FairMot [
33], and ByteTrack [
34]. So, public dataset annotation of group-housed pigs is crucial in tracking pig behavior analyses tasks.
Based on these works, to void the error switches of pig ID during tracking using the basic DeepSORT algorithm, an improved DeepSORT algorithm was proposed. Firstly, the public dataset annotation of group-housed pigs similar to the MOT20 was developed using the original dataset [
17]. Then, the detectors YOLOX-S and YOLO v5s were used to detect pigs and classify the four behaviors including standing, lying, eating, and other. Finally, the proposed approach was used to tackle error switches of pig ID in the tracking process by improving the trajectory processing and data association for the specific pig scenario. The merits of the improved DeepSORT approach contained two points. One was that we improved the trajectory processing and data association during tracking procedure for pig-specific scenarios where the number of pig target objects remained unchanged. This improvement reduced error switches of pig ID and enhanced the stability of the tracking. The other was that the behavior classification information from detectors was used in the tracking algorithm for completing behavior tracking. The comparative experiments demonstrated that the improved DeepSORT algorithm obtained stabler ID in pig behavior tracking than the original DeepSORT.
The main contributions of this paper are summarized as follows:
- (1)
An improved DeepSORT algorithm was proposed to significantly decrease error switches of pig ID in the pig behavior tracking process.
- (2)
The public dataset annotation of group-housed pigs similar to MOT20 was established for the development of advanced pig-tracking algorithms.
- (3)
Two advanced detectors, YOLOX-S and YOLO v5, were used for pig target detection.
- (4)
The tracking results of the improved DeepSORT based on YOLOX-S achieved a MOTA of 98.6%, and its IDs had a significant decrease, with a decline of 80% compared with DeepSORT.
3. Methods
3.1. Process and Flow Chart
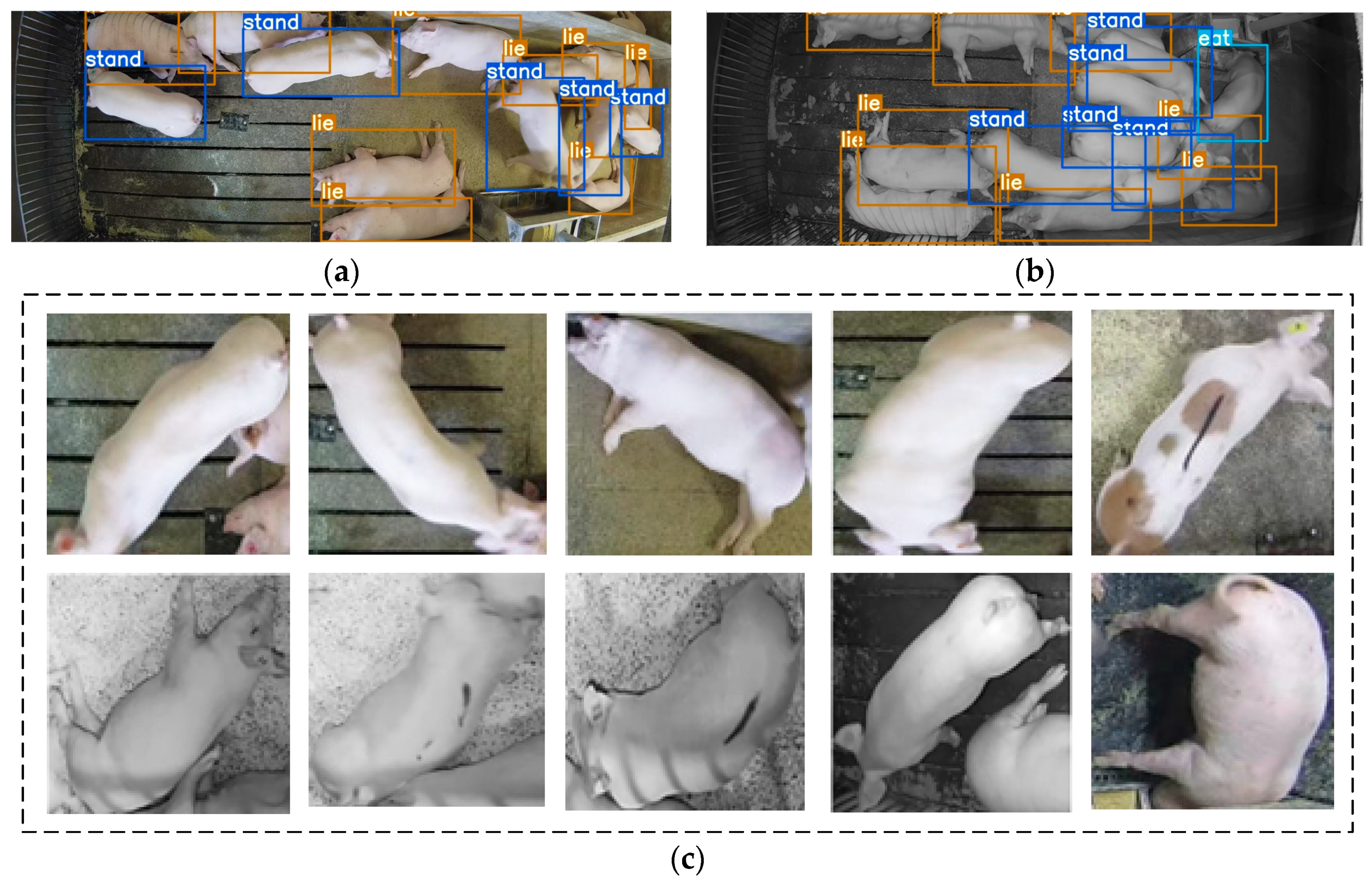
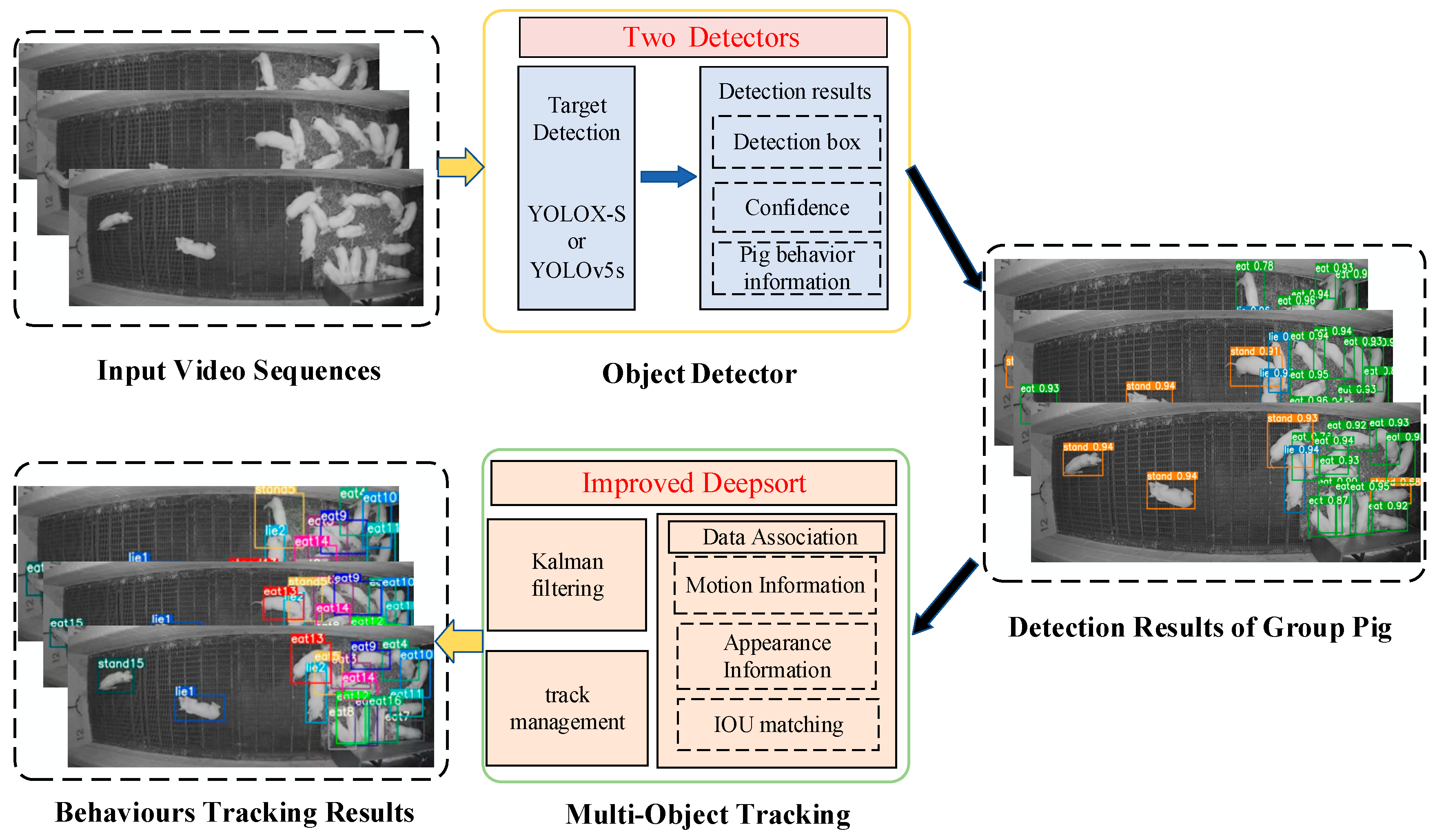
We used the pipeline in
Figure 3 to train and validate our system. The pipeline was divided into two procedures. Firstly, the video dataset annotated using the four postures of lying, eating, standing, and other was fed to the developed CNN-based behavior detector for training. The detectors used included YOLOX-S and YOLO v5s due to their optimal speed and accuracy tradeoff for real-time applications. For both detectors, we used the same environment, e.g., data augmentation, neck network, and other hyperparameters. Then, the improved DeepSORT tracking algorithm was used to track detected pig objects between two successive frames. DeepSORT adopted Kalman filtering (KF), track management, and data association to preserve the identity of pigs across consecutive frame sequences. To prevent wrong switches of pig ID numbers due to complex scenarios, e.g., pig overlapping, occlusion, and illumination change, we improved the strategies of data association of DeepSORT to achieve stable pig ID numbers according to pig farm characteristics.
The YOLO (YOLOX-S or YOLO v5s) detectors and the improved DeepSORT algorithms together accomplished individual pig behavior recognition and tracking under natural pig scenarios. In the next section, we described the training process of the detector and pig-tracking algorithm.
3.2. YOLO v5 and YOLOX-S Target Detection Network
YOLO v5 is the advanced detection model of the YOLO series that uses a single multilayer network to predict the bounding box and classification probability. In the COCO dataset, the YOLO v5 algorithm has shown remarkable accuracy and high detection speed; therefore, the YOLO v5 network was used for group-housed pig detection. According to different network depths and widths, YOLOv5 can be divided into four basic network structures: YOLO v5s, YOLOv5m, YOLOv5l, and YOLOv5x. The YOLO v5s model with the least number of parameters was chosen for target detection.
YOLOX is a high-performance detector proposed in 2021 that combines excellent advances in target detection, such as decoupled head, strong data enhancement, anchor-free, and simOTA with YOLO. YOLOX not only surpasses the AP of YOLOv3, YOLov4, and YOLOv5, but also achieves extremely competitive inference speeds. According to its scaling rule, YOLOX mainly includes YOLOX-S, YOLOX-M, YOLOX-L, and YOLOX-X models. We also chose YOLOX-S with the least number of parameters for comparison with the YOLO v5s model.
The structures of YOLO v5s and YOLOX-S are mainly divided into four stages [
25]. The first stage of the model is called input procedure, which includes scaling transformation, color space adjustment, and mosaic data enhancement to increase the amount of data for training to improve the robustness of the model. The second stage is called backbone network, which uses the CSPDarkNet53 as a basic network for feature extraction. The third stage is called detection neck (PAFPN) that adopts the feature pyramid network (FPN) and the path aggregation network (PAN) structure to retain the rich spatial information from the bottom-up data and semantic information from the top-down data steam. The fourth stage is called decoupled head (Prediction), which is used for object detection and classification to improve the converging speed and accuracy.
3.3. DeepSORT for the Group-Housed Pig Tracking Model
DeepSORT is an improved version of the SORT algorithm, which includes data association, KF estimation, and track management for multi-object tracking. It enhances the matching effect of targets by combing appearance and motion information to reduce the number of ID switches under an occlusion environment. Moreover, DeepSORT is the method of TBD, which first uses the detector to detect and classify objects, then performs the data association over consecutive frames, and then outputs the classification, location, and track ID information. The DeepSORT tracking algorithm is represented in Algorithm 1.
| Algorithm 1: DeepSORT algorithm |
| 1: Define DeepSORT configurations as cfg |
| 2: Initialize DeepSORT (DeepSORT, cfg) |
| 3: Initialize device(gpu) |
| 4: Model = load(detection model, device = gpu) |
| 5: Dataset = loadimgaes(input videos) |
| 6: For i, img in enumerate(dataset): |
| 7: pred = model(img) |
| 8: pred = non_max_suppression(pred) |
| 9: for i, detections enumerate(pred): |
| 10: xyxy, conf, cls = detections |
| 11: Pass detection results to DeepSORT |
| 12: features = get_features(xyxy, img) |
| 13: Predict track by using Kalman filter |
| 14: Compute cost matrix using features, track, detections |
| 15: matches, unmatched_tracks, unmatched_detections = match(cost matrix) |
| 16: Update track set by using match results |
| 17: Save results |
In the DeepSORT algorithm, there are two state vectors named detection and track. Detections are used to store the detected bounding boxes (BB) (
) from the current frame by the object detector, and tracks are regarded as the correctly matched tracks (
), which include the position, state, and speed information of the targets before the current frame, respectively. Among them,
where
,
,
, and
denote coordinates of the upper left point, the width and height of the bounding box.
denotes the confidence;
and
denote reidentification features of the detected object used for cascade matching and classification information.
where
denote tracks’ mean (including location) and variance for KF prediction and update;
,
,
, and
denote tracking ID number, number of matches, plus 1 if successful, number of recent KF updates, tracks’ state including tentative, confirmed, and deleted.
and
are similar to the corresponding detection.
The key three modules of DeepSORT in
Figure 3 are described: (1) The data association module is responsible for matching the KF’s predicted bounding boxes with detections on the image. The association of detections to tracks is solved by the Hungarian algorithm, using cascade and IOU matching. Firstly, the DeepSORT method uses cascade matching including motion and appearance metrics to associate valid tracks. The second part uses intersection over union (IoU) to associate unmatched and tentative tracks (recently created) with unmatched detections.
(2) The KF estimation module uses a linear constant velocity model to represent each track motion model. When a detection is associated with a tracked object (track), its BB is used to update the track state. If no detection is associated with the track, then the track’s state is only predicted.
(3) The track management module is used for the creation and deletion of tracks. New tracks are created when detections do not overlap or overlap with tracks below a minimum IoU threshold. The BB of the detection is used to initialize the KF state. If a new track does not receive updates because it does not receive associations or if tracks stop receiving associations, they are deleted to avoid maintaining a high number of tracks to false positives or objects that left the scene.
3.4. Improved DeepSORT Method
In the group-housed pig tracking application, as the video frames grow, DeepSORT will assign different ID to the same pig target, and the maximum ID value of the pig will significantly exceed the number of real pig targets. In addition, the pig ID are changed wrongly in tracking; the main reason is that the detection results cannot match to the original tracks when the target pigs are moving or overlapping due to occlusion, resulting in new tracks generated from unmatched detection results. To overcome these problems, we proposed an improved DeepSORT, which was used to limit the target object ID growth for pig-specific scenarios and improve matching process and track generation in the tracking process.
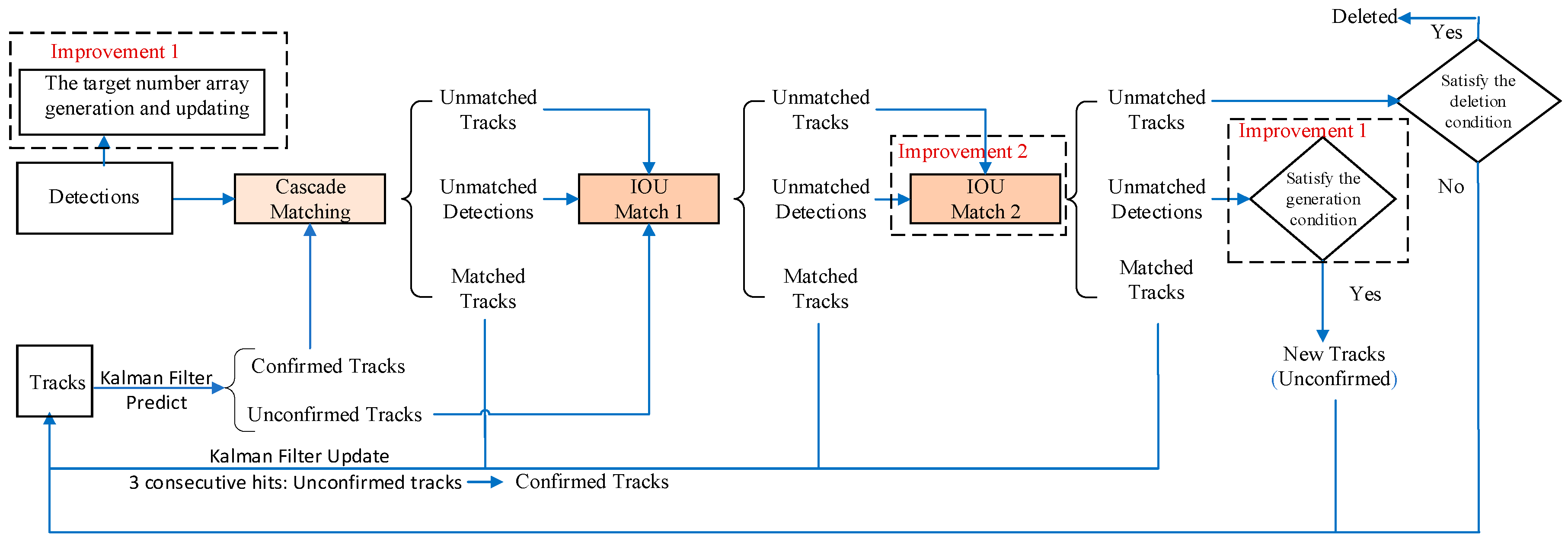
Figure 4 shows the flow chart of tracking process of the improved DeepSORT.
The improved DeepSORT includes two parts:
(1) Limiting the target object ID growth for pig-specific scenarios.
In
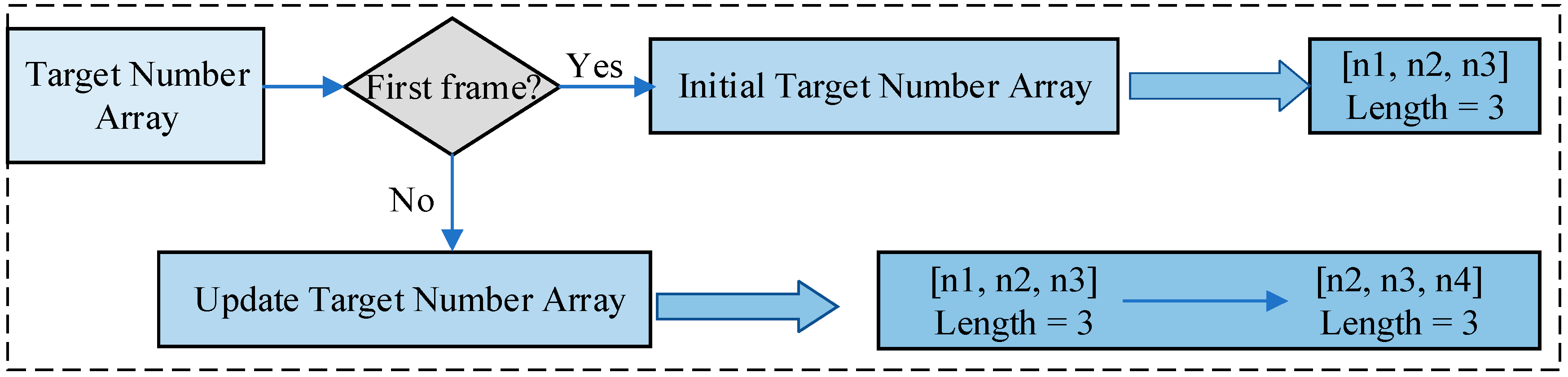
Figure 4, the improvement 1 of limiting the target object ID growth contains two subpoints. Firstly, the number of detections (n) in each pen obtained through the detector was stored in a one-dimensional array with a length equal to 3, which was called the target number array (TNA). If the video frame was the first frame, all the values of the array were set to the number of detected targets (n1 = n2, n2 = n3) in the first frame. In consecutive frame sequences, the number of detection targets in the current frame sequence was inserted into the end of the array, and the number of targets stored in the head of the array was deleted. The process of initialization and updating the target number array is shown in
Figure 5.
Secondly, because the detection result had a certain probability of false and missed detection, we created the tracks for the detections after the second round IOU match failure according to the TNA. The process of a new track creation contained three steps:
(a) For frame T − 1, the TNA dynamically stored the total number of targets in the detection result across consecutive frame sequence (Length = 3, in this study), and the ID maximum value was determined by the rounded value of the average of the TNT. Suppose the TNT was set to [
15,
15,
15], then the ID maximum value was 15.
(b) For frame T, the detector detected a new target, and the ID of the unmatched detection box was 16; the TNT was set to [
15,
15,
16] according to the rule of
Figure 5, and then the ID maximum value was 15. If the current generated unmatched detection ID value (16) exceeded the ID maximum value (15), it was considered a false positive and no new track is created.
(c) For frame T + 1, the detector detected a new target in two consecutive frames; the ID of the unmatched detection box was 16; the TNT was set to [
15,
16,
16], and then the ID maximum value was 16. If the current generated unmatched detection ID value (16) did not exceed the maximum ID value (16), it was considered a false negative and a new track was created.
(2) Adding the second round of IOU matching to associate the unmatched detections and tracks.
Because the pigsty was a specific and closed scene, usually no pig target was added or reduced. To improve the matching effect during the data association process, after the first round of IOU matching was finished for initial matching, we added the second round of IOU matching to deal with the unmatched detections.
Figure 4 shows the improvement 2 for the process of the second round of IOU matching. Meanwhile, the second round of IOU matching set the IOU to a larger value, and it was possible to achieve better results in associating unmatched detections with tracks.
Finally, the tracking process of the improved DeepSORT in
Figure 4 is listed as follows:
(1) The target number array was dynamically created according to the results of the detection of video sequences.
(2) Cascade matching was used for the first matching of detections and confirmed tracks during consecutive frame sequence, and the matching tracks were updated with KF based on assigned detections.
(3) Unconfirmed tracks (before frame), unassigned tracks in cascade matching, and unmatched detections were matched for the first round of IOU matching using the Hungarian assignment algorithm.
(4) The unmatched tracks and unmatched detections produced after the first round of IOU matching were used for the second round of IOU matching operations. For unmatched detections, we used the rule of the improvement 1 to create the new tracks. For unassigned tracks, we removed the tracks that met the conditions to be deleted.
3.5. The Evaluation Metrics
The following evaluation criteria were used to evaluate the results of multiobject tracking model.
where True Positive (TP) is the number of pixels correctly predicted to the pig category; False Positive (FP) is the number of pixels incorrectly predicted to the pig category; False Negative (FN) is the number of pixels predicted to the pig category as the background, and F1 is a comprehensive evaluation index of precision and recall rate.
Multi-object tracking accuracy (MOTA) measures the performance of tracking in detecting objects and maintaining trajectories, and it was calculated as follows:
where
is the ID switch, and
is the number of all objects.
Multiple object tracking precision (MOTP) indicates the positioning accuracy of the detector, and it was calculated as follows:
where
is the average metric distance, and
denotes the number of successful matches for the current frame.
ID switch (IDs) refers to the total number of ID switches in the video. The lower the value, the better the performance.
Mostly tracked (MT) denotes the number of successful tracking results that matched the true value at least 80% of the time.
Identification precision (IDP), Identification recall (IDP), and Identification F1(IDF1) denote ID precision, ID recall, and IDF1 score similar to the precision, recall, and F1 score of the metrics in the detection model, and the main role of these metrics was to evaluate the performance of ID switches. The higher their values, the better their performance.
5. Discussion
In real farming scenarios, the identity of pigs is hard to track due to dense overlapping and occlusion, which still make it challenging to automatically track the behavior of group-housed pigs using computer vision techniques. To improve the problem, this study proposed an improved DeepSORT algorithm of behavior tracking based on the YOLOX-S and YOLO v5s detectors.
The improved DeepSORT contained two innovation points. An innovative point was limiting the target object ID growth. For the specific group-housed pig farms, where the number of pigs in each pen did not change, we proposed improving the trajectory processing to create tracks. Pig targets in each pen were detected, and the total number of targets in the detection result was stored dynamically, and then the numbers of detected targets in the last three consecutive frames were saved as the target number array and used for improving the trajectory management. The created track ID numbers did not exceed the maximum number. Another innovative point was adding the second round of IOU matching to associate the unmatched detections and tracks. Thus, the improved DeepSORT algorithm avoided the error switches of every pig ID in each pen and improved the accuracy of the tracker. In the tracking process, the pig behavior category was added to the track of target tracking, which accomplished the tracking of the pig behavior category. In addition, it could automatically count the different behavior times of each pig every day in each pen and was used to identify whether the pig was abnormal in health.
In terms of behavior tracking, Alameer et al. (2020) adopted the Faster R-CNN and YOLOv2 as the detectors and DeepSORT as the tracker to overcome illumination changes and the occlusions of pigs in the commercial environment. In addition, a deep-learning-based pig posture and locomotion activity detection and DeepSORT tracking algorithms were designed to measure pig behavior changes in an experimental pig barn at different greenhouse gas (GHG) levels [
18]. These approaches were good at detection and tracking behaviors. However, as the video frames grew and there were error pigs IDs in tracking due to dense overlapping and occlusion, so the DeepSORT algorithm could hardly be used to track different pig behaviors over a long period. Our proposed improved DeepSORT could avoid the error changes of ID, which is suitable for monitoring the different behaviors of pigs in long-time tracking.
Moreover, the dataset [
16] for tracking was specifically annotated. Instead of annotating pig postures in each frame, unique identification numbers were given to each pig across the frames to avoid error ID switches. The annotated dataset was not suitable for target detection and tracking by the public tracking frameworks. However, our dataset annotation of group-housed pigs was established similarly to MOT20 using DarkLabel software, which can be used for the development of many advanced tracking algorithms for pig behavior tracking.
Our proposed method still has some limitations. Compared with JDE methods [
27], the improved DeepSORT is still a TBD paradigm, which runs slowly and cannot achieve real-time performance; Furthermore, in long-time tracking, detections with a low score in the detector are removed, which will lead to the erroneous deletion of some tracks. The reason is that low confidence detection boxes sometimes indicate the existence of objects, e.g., the occluded objects. Filtering out these objects causes irreversible errors for MOT and brings non-negligible missing detection and fragmented trajectories.
With significant improvements in the performance of target detectors based on deep learning, YOLOX-S, or YOLO v5s, the combined tracker achieved advanced detection and tracking performance for pig behavior tracking in complex scenes. The improved tracking algorithm significantly reduced IDs errors and achieved stable individual pig tracking according to real farming scenarios. Thus, the proposed algorithm is an effective solution for automatically detecting and tracking multiple pigs, and it will qualify the current application for tracking pig behavior quickly and accurately.
6. Conclusions and Future Directions
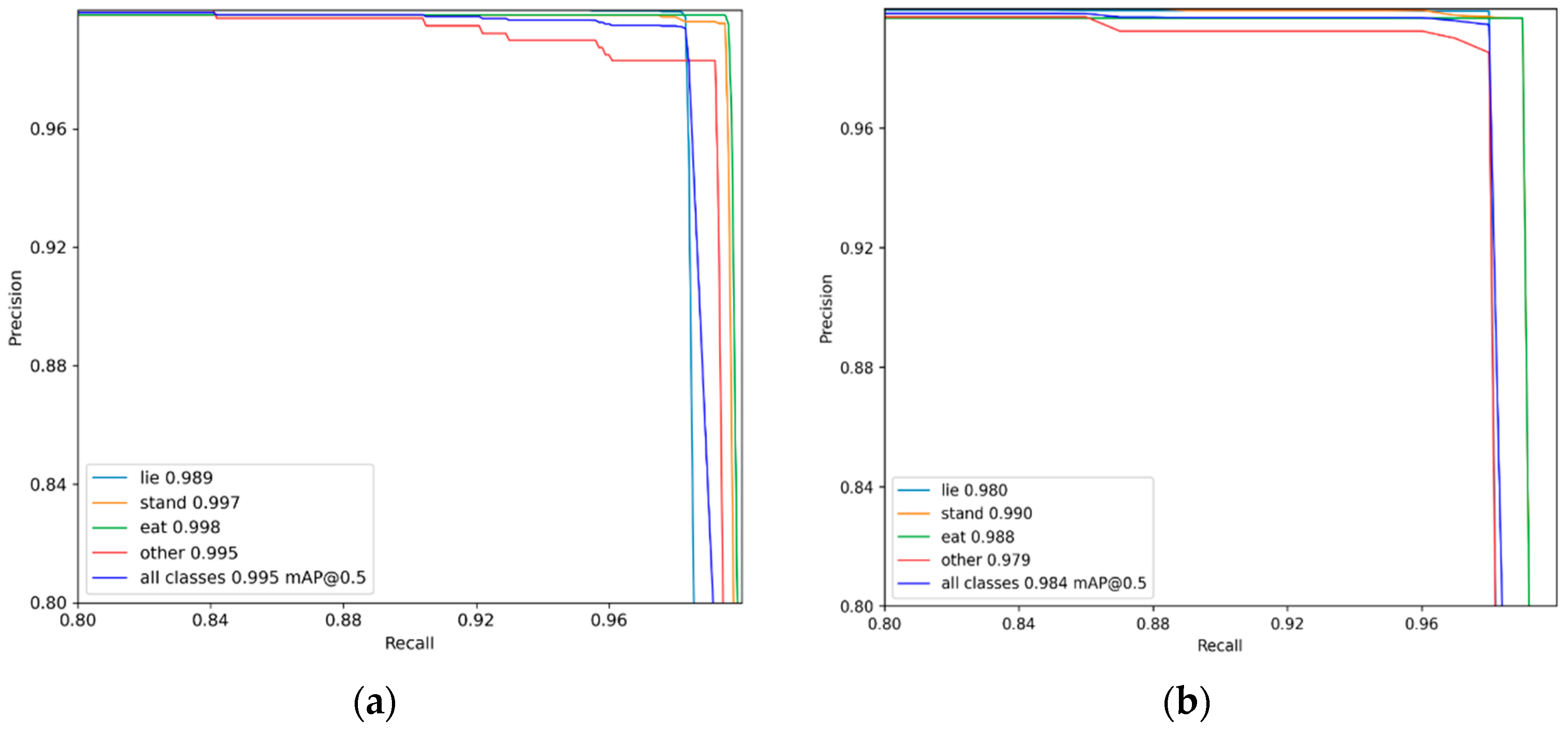
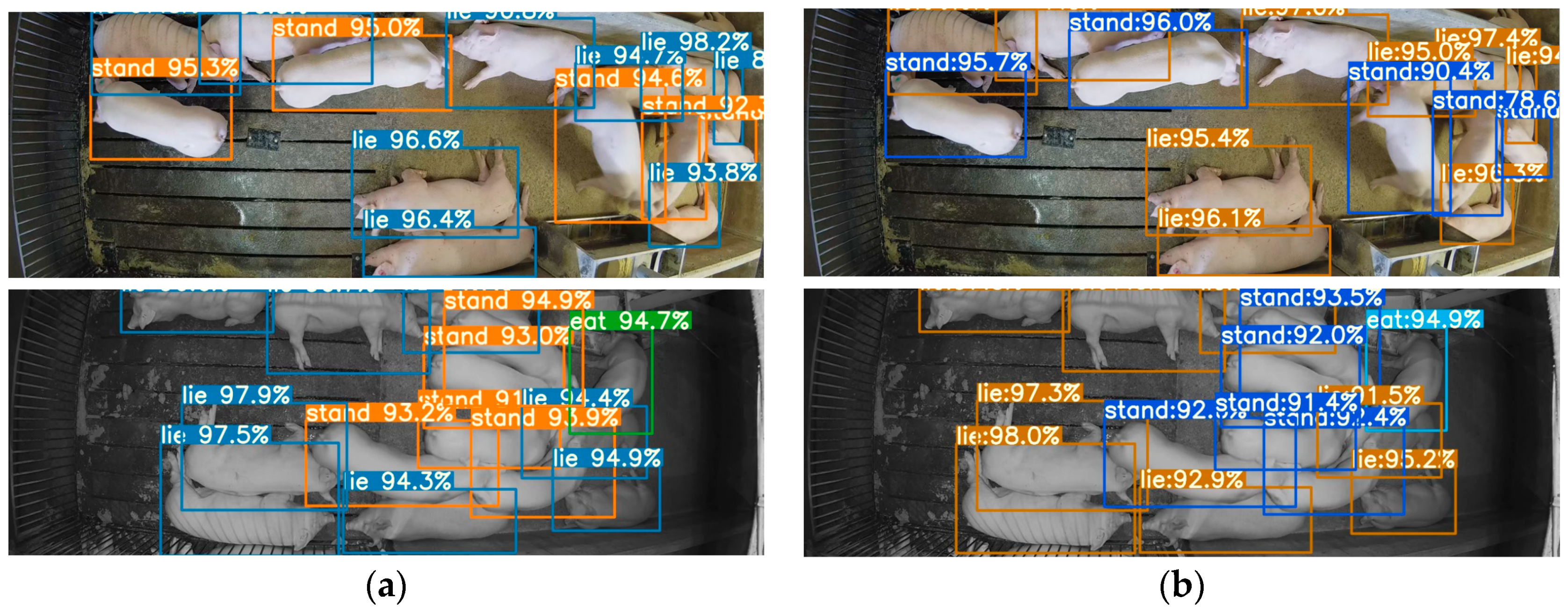
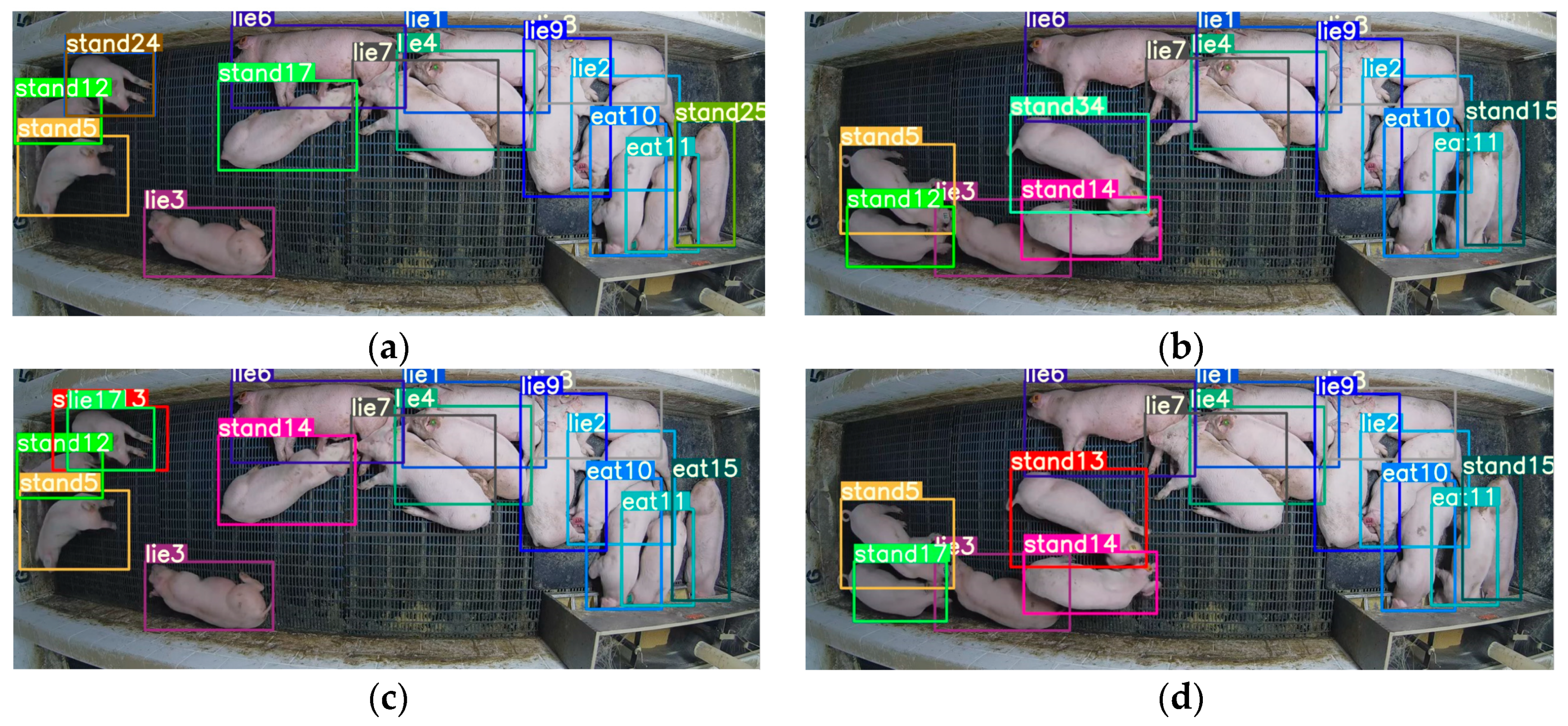
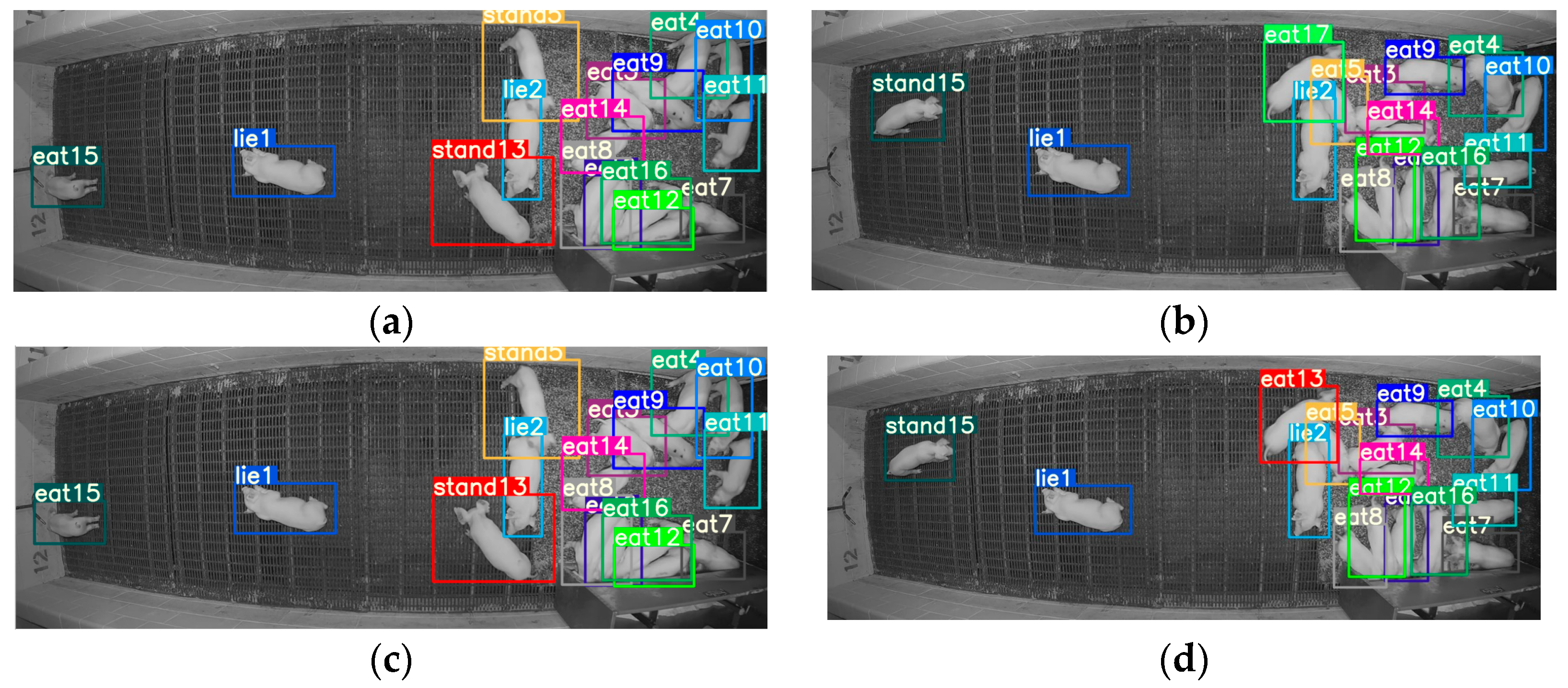
This paper proposed an improved DeepSORT algorithm for automated behavior recognition and tracking of group-housed pigs based on the YOLOX-S or YOLO v5s detectors. The DeepSORT was improved to reduce the error pig IDs significantly in tracking due to dense overlapping and occlusion and enhance the quality of tracking for pig-specific scenarios. In the detection experiments, the YOLO v5s network model was superior to the YOLOX-S network, Compared with YOLOX-S, the detection mAP@0.50:0.95 of YOLO v5s increased by 2.3%. However, in the tracking experiments, the YOLOX-S + DeepSORT model outperformed the YOLO v5s + DeepSORT model. Compared with YOLO v5s + DeepSORT, its MOTA, IDP, IDR, and IDF1 increased by 2.2%, 7.5%, 8.7%, and 8.1%, respectively, and the average detection and tracking time decreased by 0.005 s. Moreover, using the improved DeepSORT based on the YOLOX-S or YOLO v5s detectors, we found that the values of IDF1, IDP, and IDR achieved a very significant improvement, and the error switches of pig ID were effectively avoided for obtaining stable tracking of individual pigs. So, the improved behavior tracking algorithm can meet the needs in the actual farming environment and provide technical support for the contactless and automated monitoring of pigs, which has good engineering application prospects for the development of smart pig management. Further work consists mainly of the following two points:
(1) The daily behavior of each pig per pen can be automatically obtained by using an improved tracking algorithm, which can be used to analyze and find abnormal pig behavior. Therefore, we will conduct pig behavior analyses that assist the manual observations and improve pig farm automation management.
(2) Long-time tracking requires more resources and time, which is not sufficient for practical application. In the future, to achieve better speeds, we will utilize smaller detectors and the JDE trackers to complete pig behavior tracking. Moreover, to reduce storage capacities, we will probably use lightweight real-time object detectors, such as YOLOX-Tiny and fast-tracking methods to implement pig behavior tracking.
(3) MOT technologies have a wide range of applications, including intelligent video surveillance, military, automated driving, virtual reality, medical, health, and other fields. For example, in the auto drive system, the MOT algorithm tracks the movement of moving vehicles and pedestrians and predicts their future position, speed, and other information to accomplish automated driving. In the field of virtual reality, MOT technology uses the information, including human actions and continuous tracks captured by the camera, to achieve human–computer interaction. In the medical and health fields, with the help of medical auxiliary technologies, such as nuclear magnetic resonance and drug-targeting technology, the patient’s lesion location is tracked to observe whether the lesion location has spread by using advanced MOT technology.
Further improvements will be considered by exploring a more effective detection model, such as YOLOv7 for detecting objects with fewer misses and less error detection due to influences related to occlusion, small target, and illumination changes. The strategies to mitigate the detection errors of detectors can improve the tracking performance. At present, to make the MOT method run in real time, a lot of work on designing the lightweight network structure of MOT system has been performed for embedded applications. Furthermore, designing and using efficient data association algorithm are also an effective strategy to improve target tracking in single cameras and multiple cameras. For example, the approaches of multilevel dynamic matching are designed for similarity matching and data association, which can effectively reduce the impact of the unstable factors of the detector on the tracker.

 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}