
Processing Method of Gearbox with Non-Circular Gear Train and Its Application in Rice Potted Seedling Transplanting Mechanism
Abstract
:1. Introduction
2. Mechanism Analysis and Gearbox Introduction of Rice Potted Seedling Transplanting Mechanism
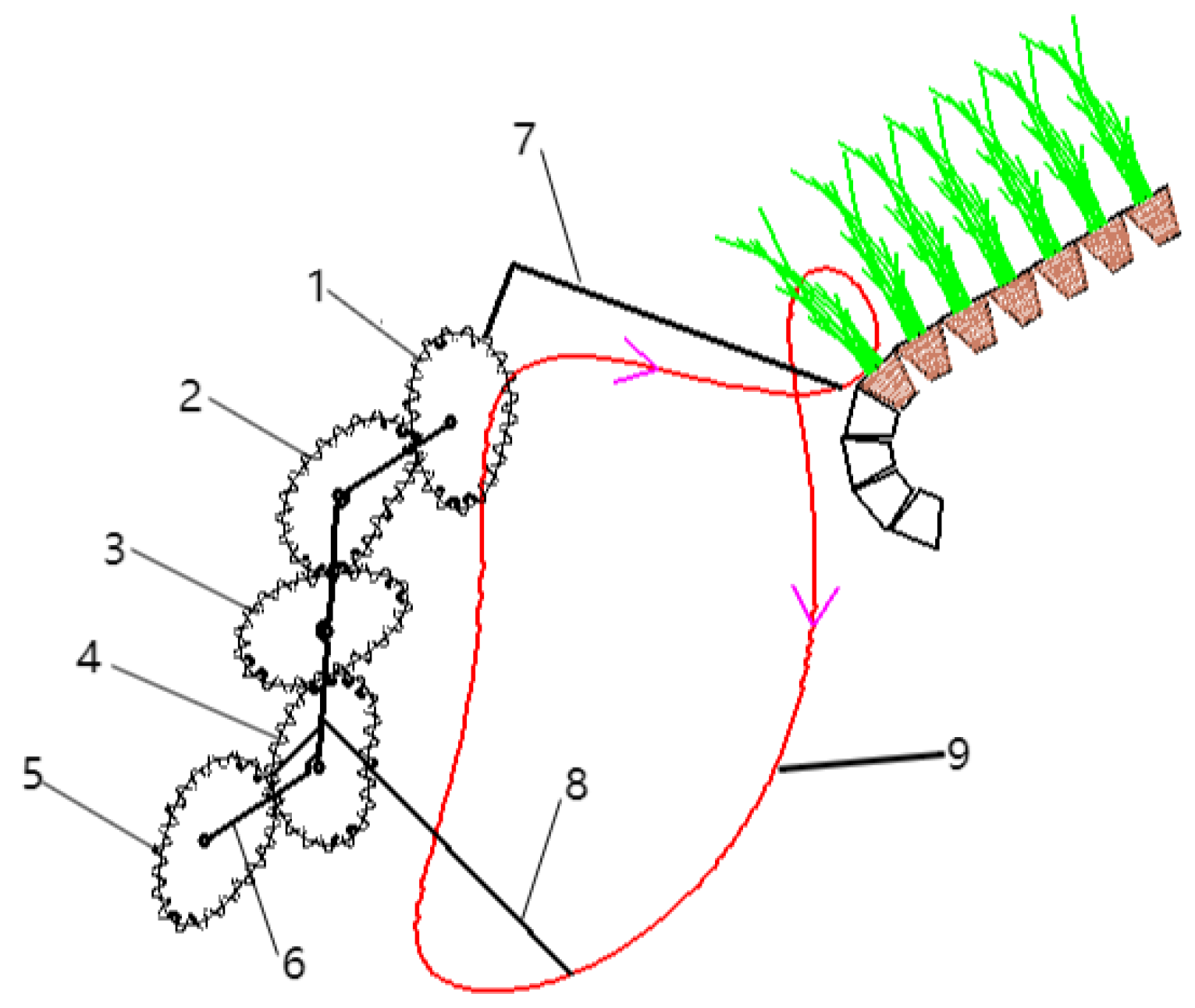
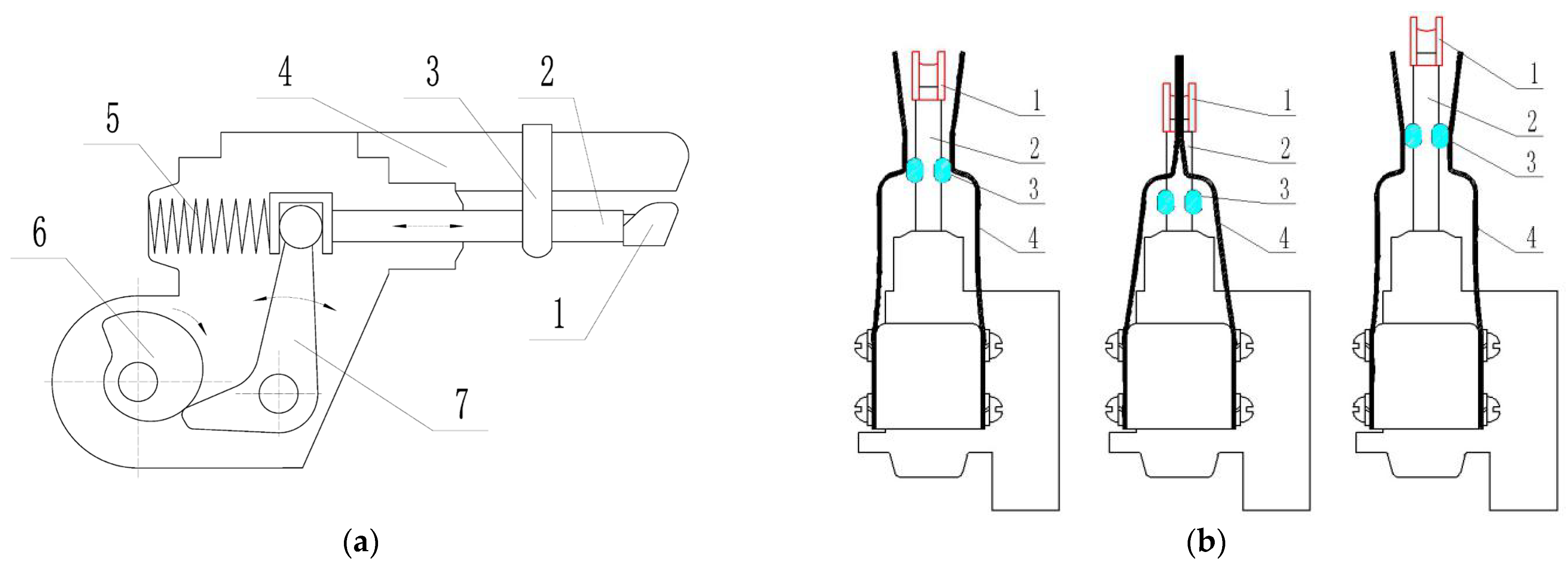
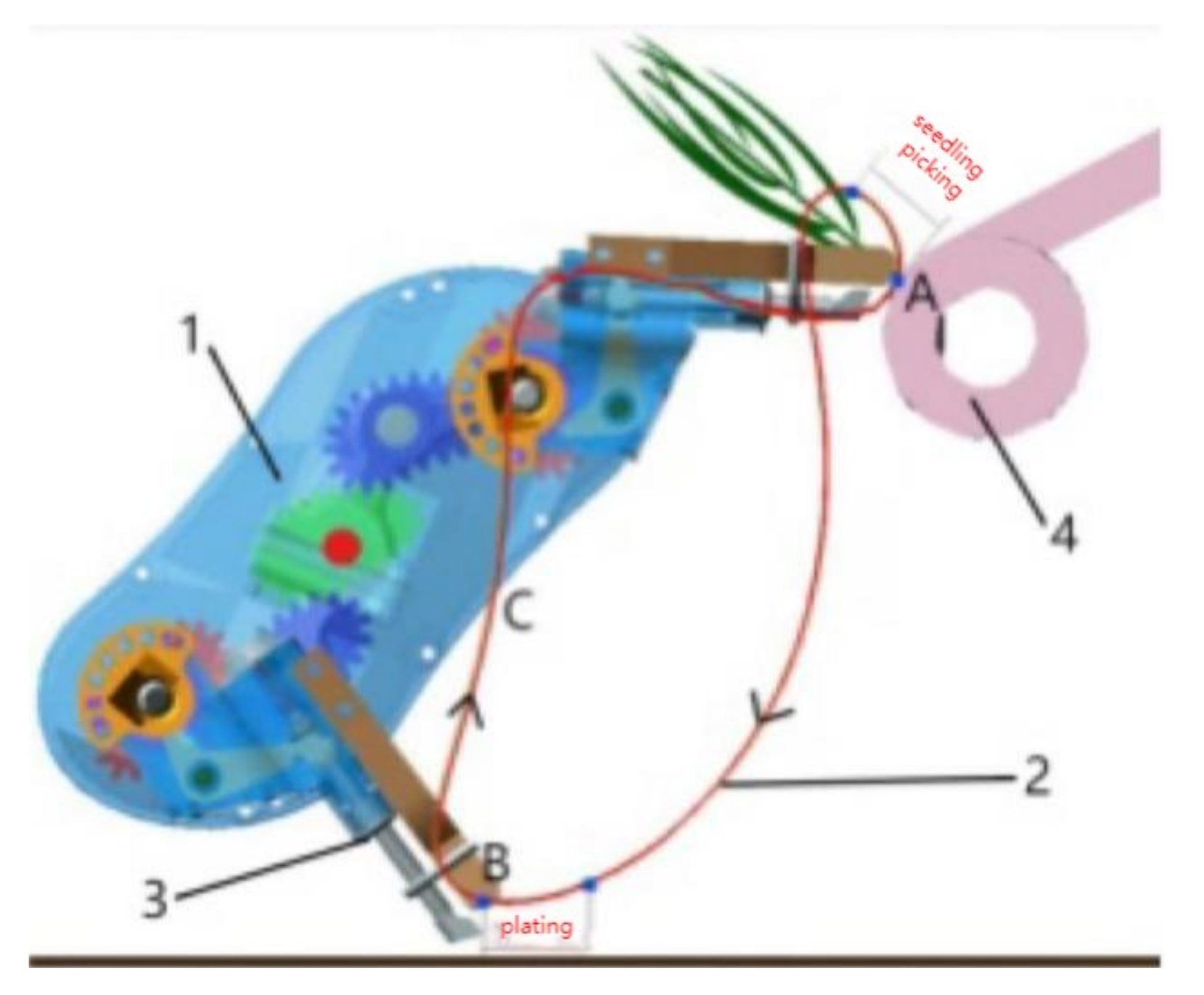
2.1. Composition of Rice Potted Seedling Transplanting Mechanism
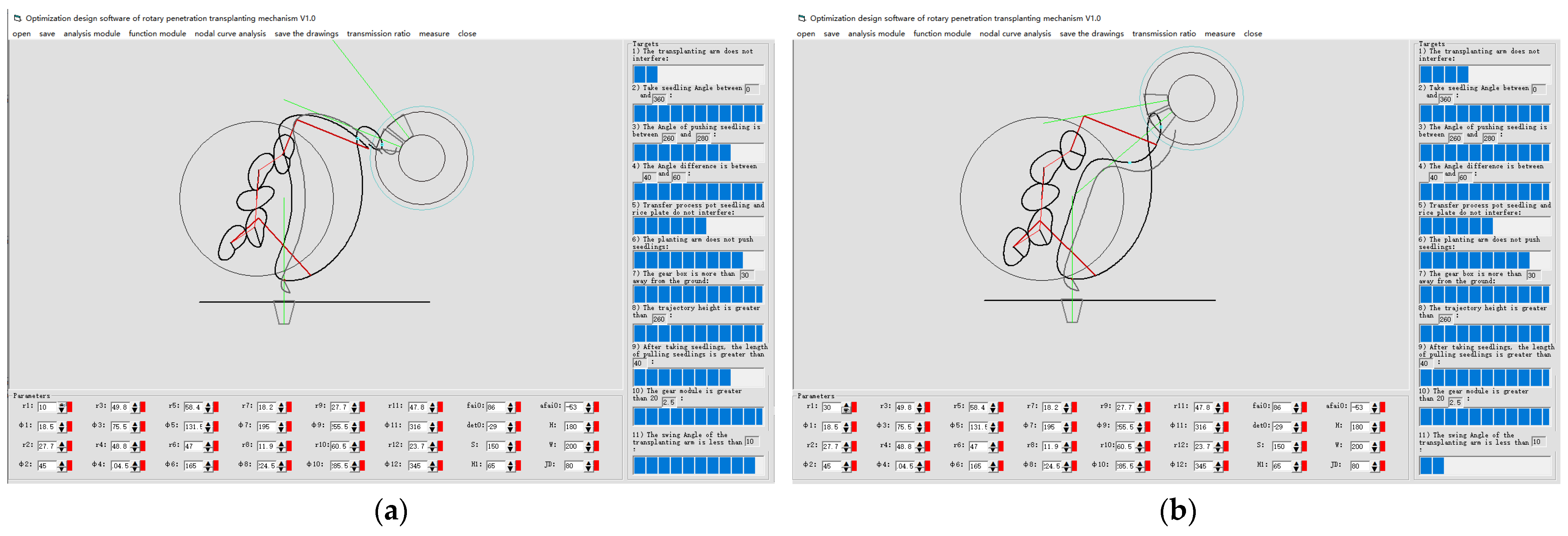
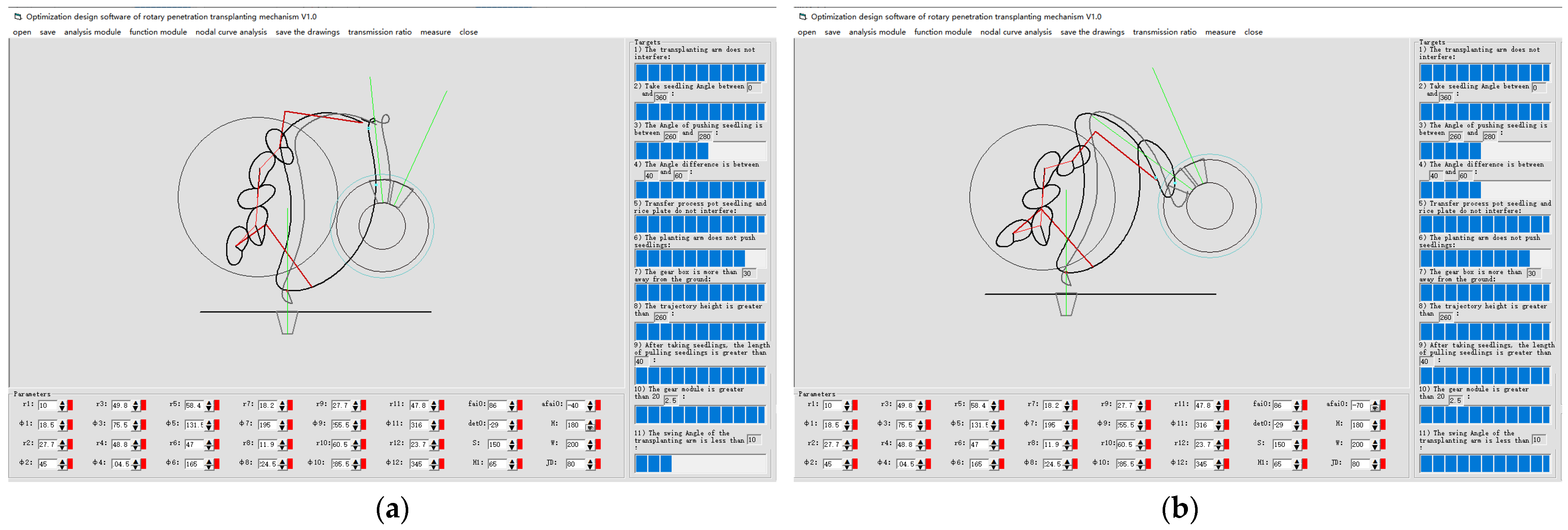
2.2. The Trajectory and Attitude Analysis of the Transplanting Mechanism
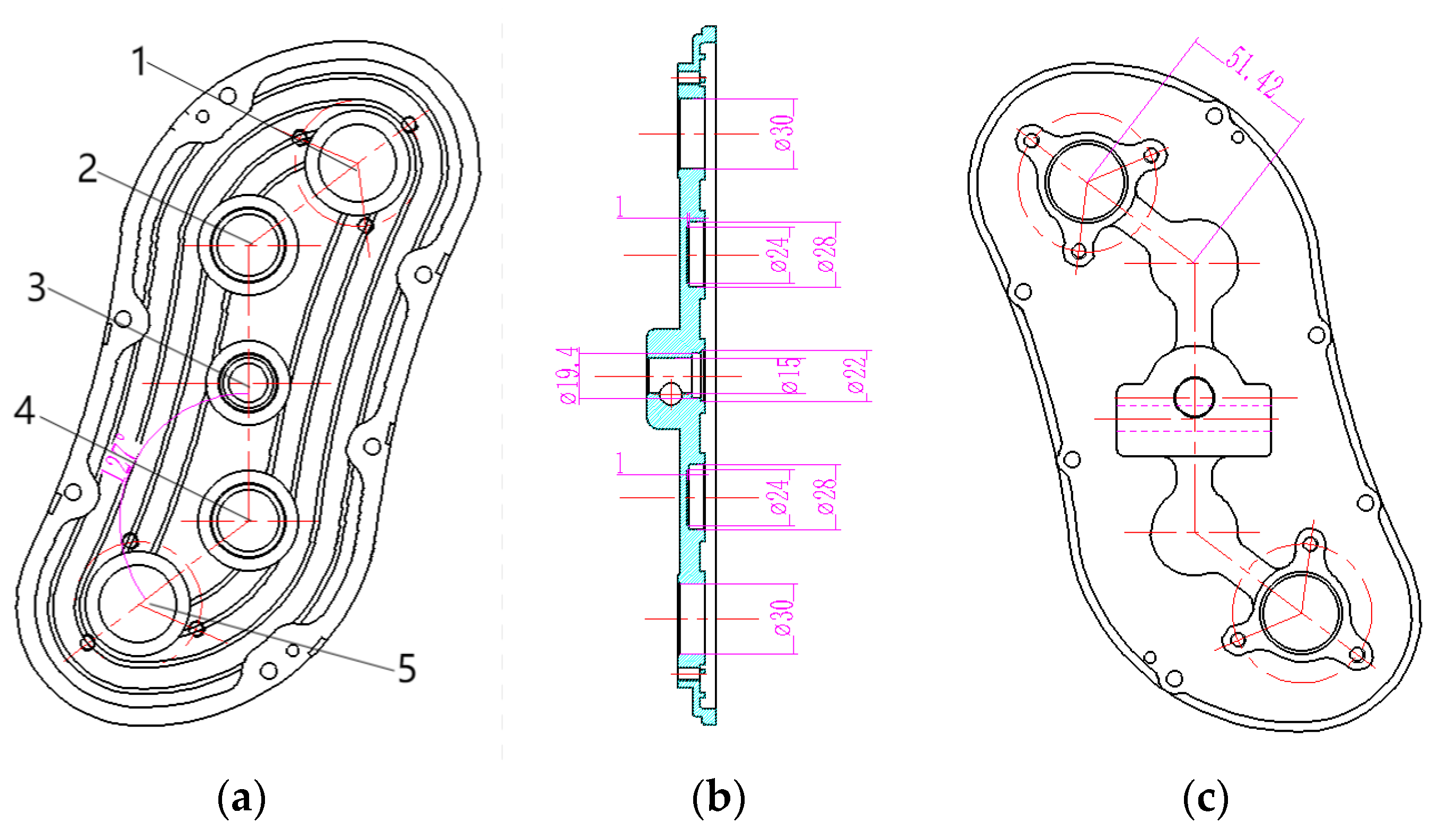
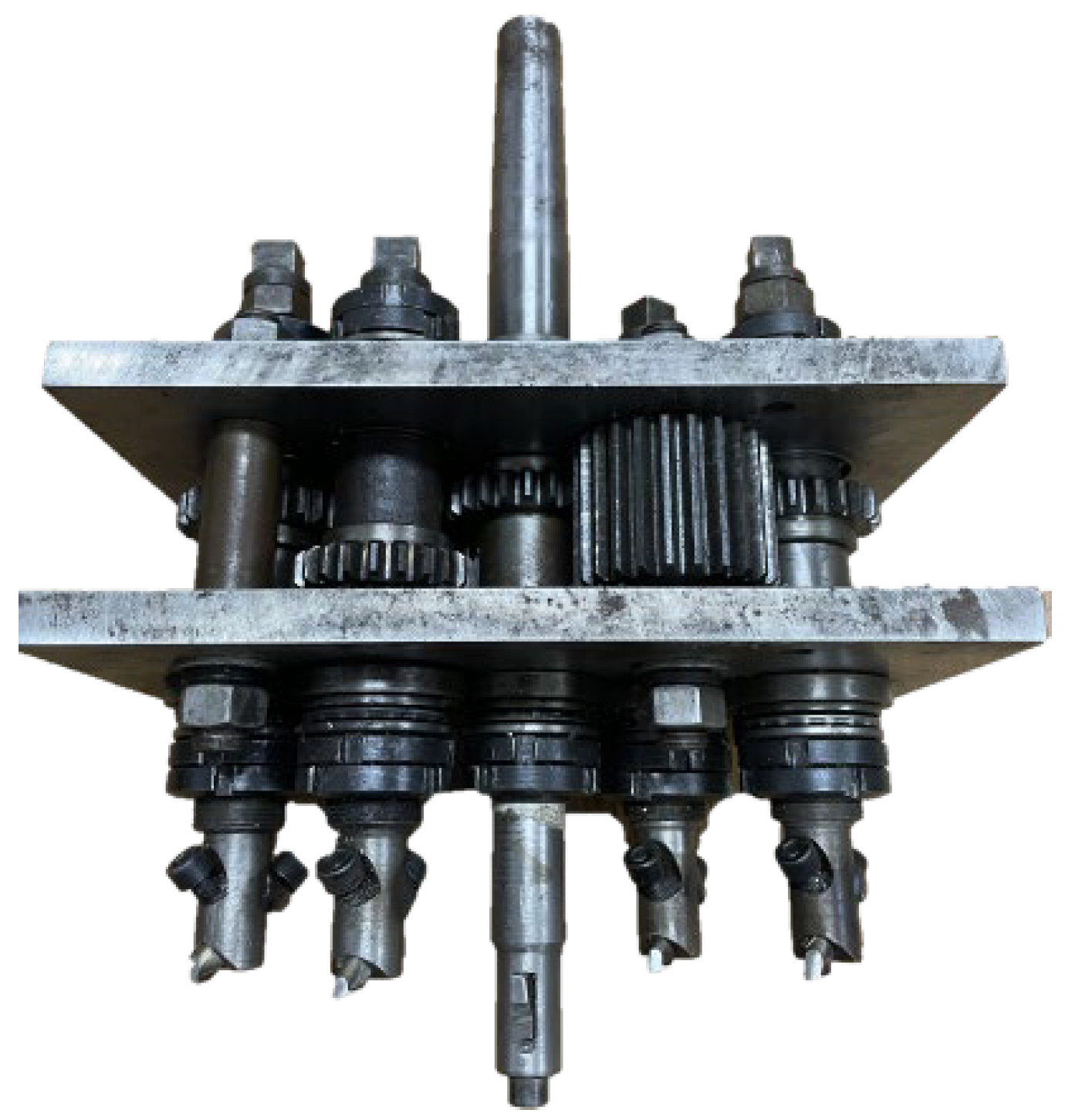
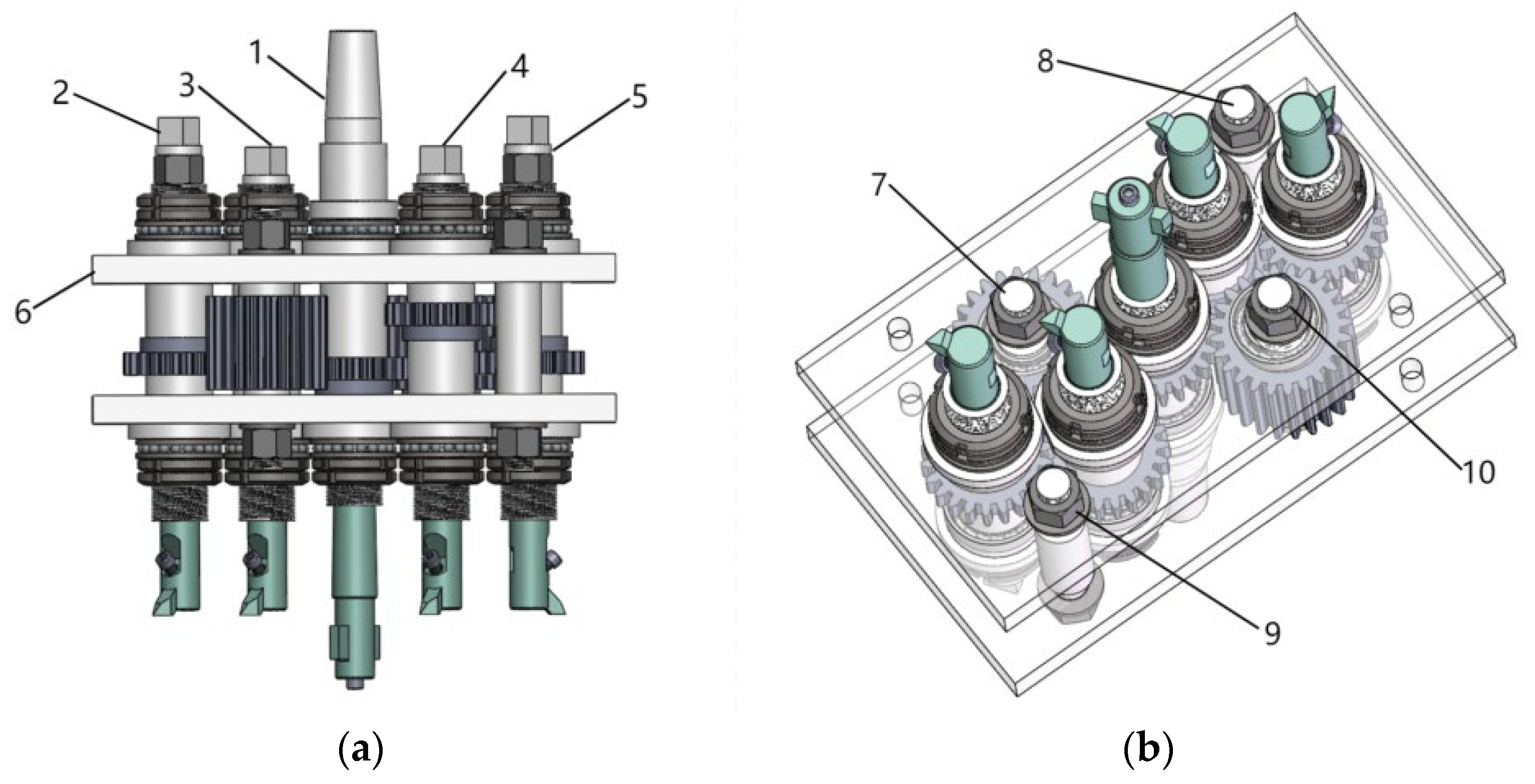
2.3. Gearbox Design
3. Gearbox Processing Tool and Processing Method
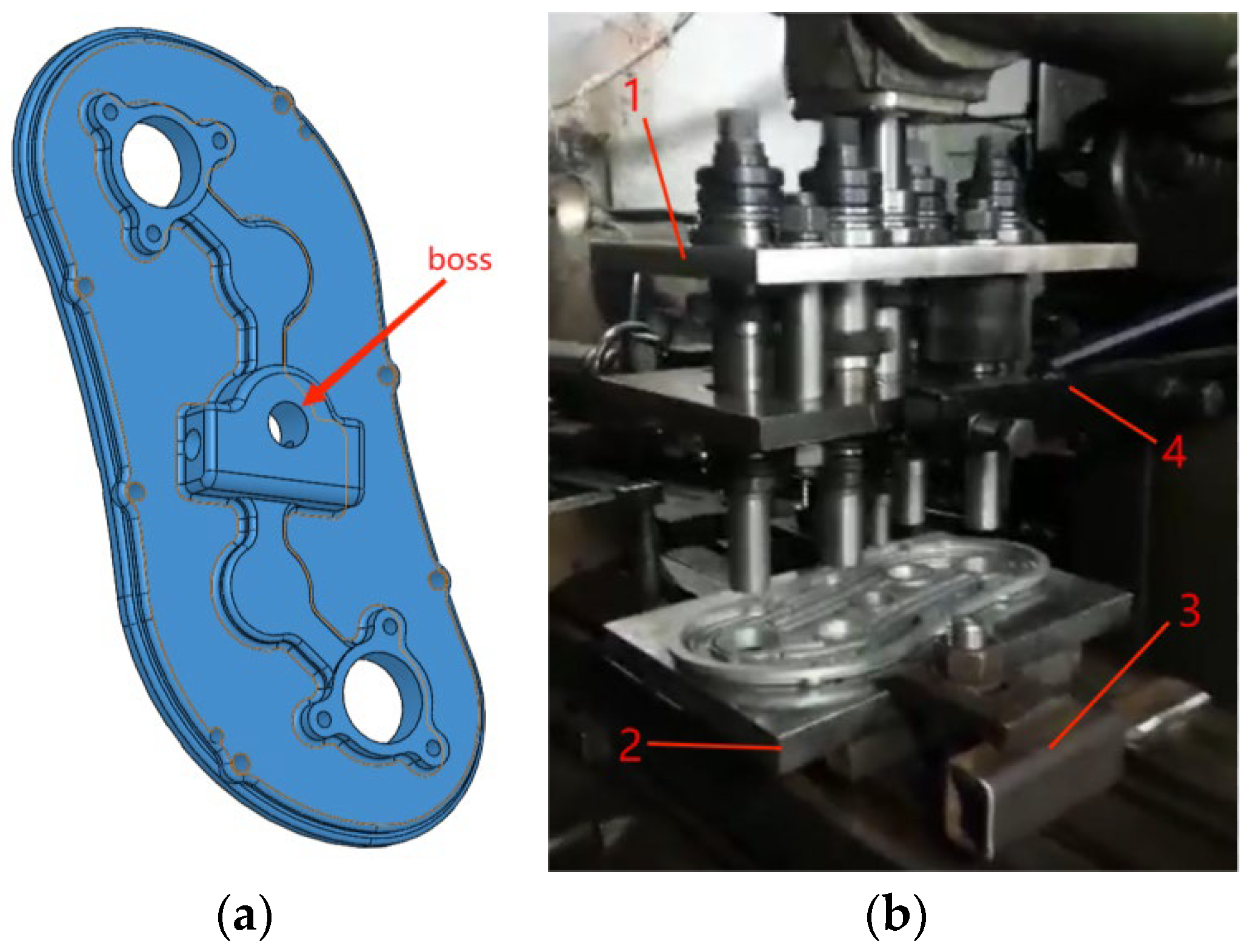
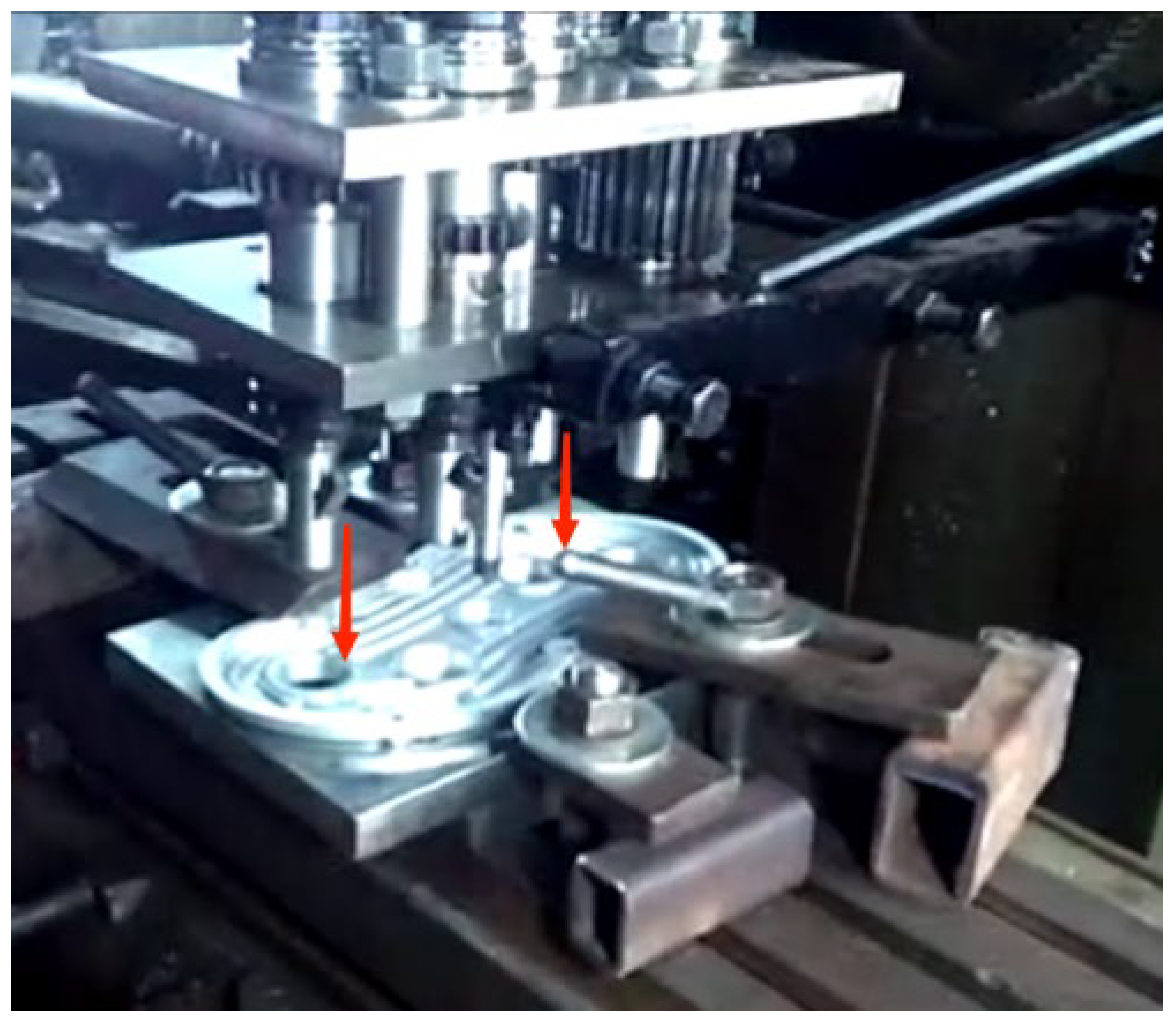
3.1. Gearbox Processing Tool Design
3.2. Processing Method Design
4. Verification Experiment
5. Conclusions and Prospect
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Luo, X.; Xie, F.; Ou, Y. Experimental investigation of different transplanting methods in paddy production. Trans. Chin. Soc. Agric. Eng. 2004, 20, 136–139. [Google Scholar]
- Wang, Y.; Zhang, Z.; Zhang, Y.; Cui, H. Research and progress of rice direct sowing at home and abroad. J. Agric. Mech. Res. 2007, 29, 48–50. [Google Scholar]
- He, X.; Wang, J. The technique of paddy direct seeding. J. Chin. Agric. Mech. 2003, 23–25. [Google Scholar] [CrossRef]
- Ye, Y.; Xiao, L.; Huang, L.; Pu, C.; Cai, J. Research and prospect of rice pot seedling transplanter. Chin. Sot. Agric. Mach. 2018, 49, 5–7. [Google Scholar]
- Cai, Y. The practice of rice mechanized transplant technology popularization in zhejiang shaoxing. J. Chin. Agric. Mech. 2008, 2, 50–54. [Google Scholar]
- Yin, J.; Wang, Z.; Zhou, M.; Wu, L.; Zhang, Y. Optimized design and experiment of the three-arm transplanting mechanism for rice potted seedlings. Int. J. Agric. Biol. Eng. 2021, 14, 56–62. [Google Scholar] [CrossRef]
- Song, Y.; Zhang, H.; Dai, Q.; Yang, D.; Guo, B.; Zhu, C.; Huo, Z.; Xu, K.; Wei, H.; Hu, J.; et al. Effect of rice potted-seedlings per hole by mechanical transplanting on tillers emergence, panicles formation and yield. Trans. Chin. Soc. Agric. Eng. 2014, 30, 37–47. [Google Scholar]
- Wang, L.; Sun, L.; Xu, Y.; Yu, G.; Zhang, W.; Zheng, J. Design method of transplanting mechanism of planetary gear train based on spatial trajectory. Trans. Chin. Soc. Agric. Mach. 2021, 52, 51–59. [Google Scholar]
- Wu, G.; Yu, G.; Zhou, H.; Ge, Y.; Ye, A.; Wang, L. Reverse design and tests of three-arms rotary rice seedling transplanting mechanism. Trans. Chin. Soc. Agric. Mach. 2022, 53, 84–91. [Google Scholar]
- Cai, J.; Liu, M.; Xiao, L.; Lin, J.; Ye, Y.; Yang, H. Design and experiment of transplanting device with variable row-spacing of rice potted-seedling transplanter. Trans. Chin. Soc. Agric. Mach. 2020, 51, 50–59. [Google Scholar]
- Yu, G.; Chen, Z.; Ye, B.; Zhao, Y.; Zhu, J. Study on a new non-uniform and intermittent mechanism. China. Mech. Eng. 2012, 23, 2778–2782. [Google Scholar]
- Yu, G.; Huang, X.; Ye, B.; Hu, H.; Yu, T. Principle analysis and parameters optimization of rotary rice pot seedling transplanting mechanism. Trans. Chin. Soc. Agric. Eng. 2013, 29, 16–22. [Google Scholar]
- Zuo, Y.; Cao, P.; Zhao, Y.; Yu, X.; Lü, C.; Zhang, Z.; Zhang, H. Design and optimization of transplanting mechanism with B-spline non-circular planet gear train for rice pot seedling. Trans. Chin. Soc. Agric. Eng. 2014, 30, 10–17. [Google Scholar]
- Zhou, M.; Sun, L.; Du, X.; Zhao, Y.; Xin, L. Optimal Design and Experiment of Rice Pot Seedling Transplanting Mechanism with Planetary Bezier Gears. Trans. ASABE 2014, 57, 1537–1548. [Google Scholar]
- Wu, Y.; Ren, C.; Xu, S.; Liang, J.; Yang, J. Research on repairing and machining method of shaft system hole in gearbox housing of an engine. Mech. DESG 2020, 37, 155–158. [Google Scholar]
- Sun, H.; Shi, Y.; Hou, M.; Li, J.; Guo, M. Analysis on accessory gearbox housing distortion and calculating method on the parallel degree of bearing hole. Aeron. Sci. Technol. 2016, 27, 26–29. [Google Scholar]
- Wang, X.; Gu, D.; Wang, Z. Design of special fixture for gearbox front housing on machine center. Mach. Tools Hyd. 2015, 43, 5–7. [Google Scholar]
- Yu, J.; Zhou, Q. Fundamentals of Manufacturing Technology; China Machine Press: Beijing, China, 2009. [Google Scholar]
- Zhang, L.; Zhao, X.; Jiang, S.; Song, H. Optimization method of process routes for housing parts under low-carbon and low-cost constraints. China. Mech. Eng. 2018, 29, 2836–2844. [Google Scholar]
- Liu, W.; Liu, T. Design of combined machine tool for processing pin hole of gearbox housing. Modul. Mach. Tools Auto. Mfg. Tech. 2001, 7, 26–27. [Google Scholar]
- Zhang, S. Processing technology analysis of box parts. Sci. Technol. Inf. 2010, 17, 634–687. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hole Name | Diameter (mm) | Depth (mm) |
|---|---|---|
| Planetary shaft holes | 30 | 12 |
| Intermediate shaft holes | 28 | 7 |
| 24 | 1 | |
| Solar shaft hole | 22 | 2 |
| 19.4 | 3.6 | |
| 15 | 16.4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, X.; Zhou, M.; Chen, X.; Yang, J. Processing Method of Gearbox with Non-Circular Gear Train and Its Application in Rice Potted Seedling Transplanting Mechanism. Agriculture 2022, 12, 1676. https://doi.org/10.3390/agriculture12101676
Xu X, Zhou M, Chen X, Yang J. Processing Method of Gearbox with Non-Circular Gear Train and Its Application in Rice Potted Seedling Transplanting Mechanism. Agriculture. 2022; 12(10):1676. https://doi.org/10.3390/agriculture12101676
Chicago/Turabian StyleXu, Xin, Maile Zhou, Xuegeng Chen, and Jiajia Yang. 2022. "Processing Method of Gearbox with Non-Circular Gear Train and Its Application in Rice Potted Seedling Transplanting Mechanism" Agriculture 12, no. 10: 1676. https://doi.org/10.3390/agriculture12101676