



Potato Planter and Planting Technology: A Review of Recent Developments

Abstract
:1. Introduction
2. The Key Technology Status of the Mechanized Planting
2.1. Research of the Material Characteristics of Seed Potatoes
2.1.1. Division of Seed Potato types
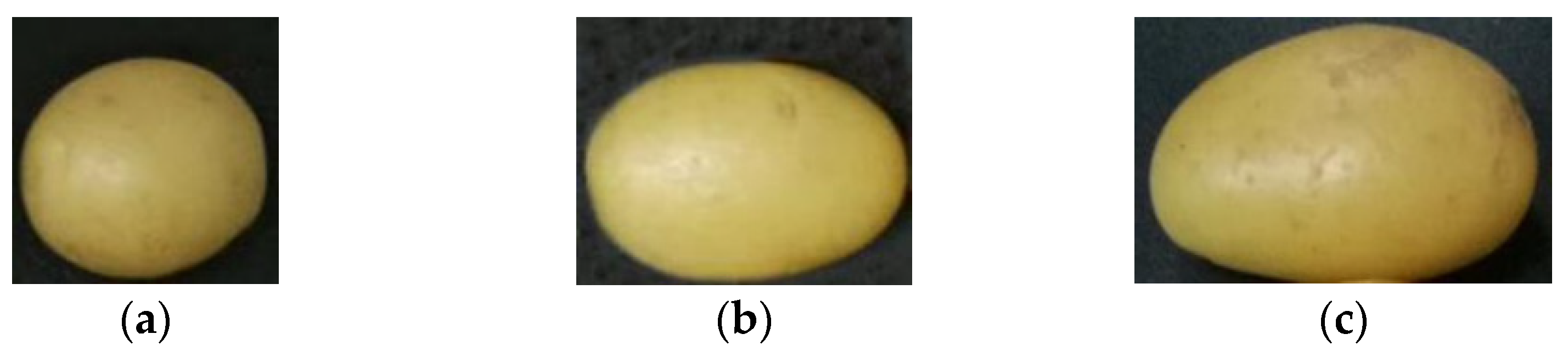
2.1.2. Research on the Basic Physical Characteristics of Seed Potatoes
2.1.3. Research of Dynamic Characteristics of Seed Potatoes
2.2. Soil Cultivation
2.3. Potato Separation
2.3.1. Cup-Belt (Chain)-Type Seed Metering Device
2.3.2. Pneumatic-Type Seed Metering Device
2.3.3. Moving-Belt-Type Seed Metering Device
2.3.4. Needle-Type Seed Metering Device
2.3.5. Pickup-Finger Seed Metering Device
2.3.6. Vibration Separation Seed Metering Device
2.4. Zero-Speed Seeding
2.4.1. Low Position Seeding
2.4.2. Seed Tube Seeding
2.4.3. Air Blowing Seeding
3. Machine of Mechanized Planting
3.1. Soil Preparation Machine
3.2. Potato Planter
3.2.1. Cup-Belt (Chain) Type Potato Planter
3.2.2. Pneumatic-Type Potato Planter
3.2.3. Moving-Belt-Type Potato Planter
3.2.4. Needle-Stabbed Type Totato Planter
3.2.5. Pickup-Finger-Type Potato Planter
3.2.6. Vibration Separation-Type Potato Planter
4. Research on Intelligent Seeding Technology
4.1. Seeding Monitoring System and Seeding Compensation System
4.2. Seeding Depth Control
4.3. Electrical Driving Technology and GPS
5. Conclusions and Recommendations
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Brown, C.R. Origin and History of the Potato. Am. Potato J. 1993, 70, 363–373. [Google Scholar] [CrossRef]
- Jiang, W.; Diao, P.; Zhang, H. Current Situation of Potato Production and Mechanized Harvest in China. Agric. Equip. Veh. Eng. 2021, 59, 18–22. [Google Scholar]
- Zhang, S. Research on Potato Planting Regionalization in China. Chin. Acad. Agric. Sci. 2021, 21, 511–522. [Google Scholar]
- Luo, Q.; Gao, M.; Zhang, S.; Lun, R. Comparative Analysis on Potato Industry between China and Other Countrie. Chin. J. Agric. Resour. Reg. Plan. 2021, 42, 1–8. [Google Scholar]
- Goffart, J.P. Potato Production in Northwestern Europe (Germany, France, the Netherlands, United Kingdom, Belgium): Characteristics, Issues, Challenges and Opportunities. Potato Res. 2022, 65, 503–547. [Google Scholar] [CrossRef] [PubMed]
- Yu, T. The general state of the Potato industry in Japan. Mod. Veg. 2006, 6, 14–15. [Google Scholar]
- Liu, Y.; Luo, Q.; Gao, J. Analysis on the development of potato production and trade in the world. World Agric. 2011, 8, 46–51. [Google Scholar]
- Food and Agriculture Organization of the United Nations. FAO. [EB/OL]. 2022. Available online: https://www.fao.org/faostat/zh/#home (accessed on 1 July 2022).
- Liu, W.; He, J.; Li, H.; Li, X.; Zheng, K.; Wei, Z. Calibration of simulation parameters for potato minituber based on EDEM. Trans. Chin. Soc. Agric. Mach. 2018, 49, 125–135. [Google Scholar]
- McLeod, C.D.; Misener, G.C.; Tai, G.C.C.; Caissie, R. A precision seeding device for true potato seed. Am. Potato J. 1992, 69, 255–264. [Google Scholar] [CrossRef]
- Raigond, B.; Verma, A.; Pathania, S.; Sridhar, J.; Kochhar, T.; Chakrabarti, S.K. Development of a reverse transcription loop-mediated isothermal amplification for detection of potato virus a in potato and in insect vector aphids. Crop Prot. 2020, 137, 105296. [Google Scholar] [CrossRef]
- Double L9560 Planter. [EB/OL]. Available online: https://www.doublelglobal.com/potato-planter.php#. (accessed on 1 July 2022).
- Li, Z.; Wen, X.; Lv, J.; Li, J.; Yi, S.; Qiao, D. Analysis and Prospect of Research Progress on Key Technologies and Equipments of Mechanization of Potato Planting. Trans. Chin. Soc. Agric. Mach. 2019, 50, 3. [Google Scholar]
- Shi, S. Design and Experimental Research of the Pneumatic Maize Precision Seed-Metering Device with Combined Holes. Ph.D. Thesis, China Agricultural University, Beijing, China, 2015. [Google Scholar]
- Boydas, M.G. Effect of cup size, seed characteristics and angular speed on the performance of an automatic potato planter under laboratory conditions. J. Agric. Sci. 2017, 23, 317–327. [Google Scholar] [CrossRef] [Green Version]
- Yazgi, A.; Degirmencioglu, A. Optimisation of the seed spacing uniformity performance of a vacuum-type precision seeder using response surface methodology. Biosyst. Eng. 2007, 97, 347–356. [Google Scholar] [CrossRef]
- Lv, J.; Yang, Y.; Li, Z.; Tian, E.; Shang, Q.; Wu, J. Design and experiment of an air-suction potato seed metering device. Int. J. Agric. Biol. Eng. 2016, 9, 33–42. [Google Scholar]
- Lv, J.; Liu, Q.; Yang, D.; Su, W.; Li, Z.; Qi, Y. Design and Test of Intelligent Seed Supply System for Air Suction Potato Planter. J. Agric. Mech. Res. 2022, 44, 157–161. [Google Scholar]
- Zhao, X. Design and Seed Metering Performance of Potato Seed Metering Device. Master’s Thesis, Shihezi University, Xinjing, China, 2017. [Google Scholar]
- Tai, W. Design and Experiment of Clamping Potato Precision Seed Metering Device. Master’s Thesis, Northeast Agricultural University, Harbin, China, 2020. [Google Scholar]
- Du, X.; Zeng, Y.; Gao, R.; Yan, J. 3-D Modelling of Irregular Shape Particles for Discrete Element Method Based on X-ray Tomography. J. Shanghai Jiaotong Univ. 2011, 45, 711–715. [Google Scholar]
- Chen, E.; Shi, L.; Sun, X. Research Status and Development Trend of Potato Planters and Seed Platters. For. Mach. Woodwork. Equip. 2021, 49, 4–8. [Google Scholar]
- Song, Y. Key Components Design of Potato Micro Seed Planter. Agric. Eng. 2018, 8, 98–100. [Google Scholar]
- Niu, K.; Fang, X.; Liu, Y. Optimized design and performance evaluation of an electric cup-chain potato metering device. Int. J. Agric. Biol. Eng. 2017, 10, 36–43. [Google Scholar]
- Zhang, Y. Design and Experimental of Air-Sucking Potato Miniature Planter. Master’s Thesis, Kunming University of Science and Technology, Kunming, China, 2016. [Google Scholar]
- Li, H.; Gao, F.; Li, Y.; Yan, J. Determination of Rice Grain Physical Properties. J. Agric. Mech. Res. 2014, 36, 23–27. [Google Scholar]
- Yu, Y.; Zhou, H.; Fu, H.; Wu, X.; Yu, J. Modeling method of corn ears based on particles agglomerate. Trans. Chin. Soc. Agric. Eng. 2012, 28, 167–174. [Google Scholar]
- Liu, C. Study and Application on Shape and Mechanical Rheological Properties of Potato. Master’s Thesis, Northeast Agricultural University, Harbin, China, 2006. [Google Scholar]
- Fu, H.; Wu, W.; Zhang, H.; Li, W. Feasibility Study on Measurement of Grain Moisture Content by Angle of Repose. J. Agric. Mech. Res. 2012, 34, 152–155+160. [Google Scholar]
- González-Montellano, C.; Fuentes, J.M.; Ayuga-Téllez, E.; Ayuga, F. Determination of the mechanical properties of maize grains and olives required for use in DEM simulations. J. Food Eng. 2012, 111, 553–562. [Google Scholar] [CrossRef]
- Wang, G. Discrete Element Method and Its Practice on EDEM; Northwestern Polytechnical University Press: Xi’an, China, 2010. [Google Scholar]
- Cai, H.; Hu, B.; Chen, Y.; Luo, X.; Wang, J.; Mao, Z.; Yuan, C. Study of Patterns of Movement of Groups of Seed Potatoes in Conical Seed Box Based on the Dem-Model of the Process. Processes 2022, 10, 363. [Google Scholar] [CrossRef]
- Chen, Y.; Tian, F.; Yan, Y.; Song, Z.; Li, F.; Chen, W. Development overview and analysis of tillage machinery abroad. J. Chin. Agric. Mech. 2018, 39, 7–11. [Google Scholar]
- Wang, Y. Planting technology of potato mechanized ridge planting. Farmers Consult. 2022, 2, 87–89. [Google Scholar]
- Zhao, L.; Liu, X.; Wang, J.; Zhuang, S. Effects of subsoiling on potato biomass and soil physicochemical properties. Bull. Agric. Sci. Technol. 2019, 4, 82–85. [Google Scholar]
- Al-Gaadi, K.A. Performance evaluation of a cup-belt potato planter at different operation conditions and tuber shapes. Am. -Eurasian J. Agric. Environ. Sci. 2011, 10, 821–828. [Google Scholar]
- Al-Gaadi, K.A.; Marey, S.A. Effect of forward speed and tuber characteristics on tuber spacing uniformity for a cup-belt potato planter. Middle East J. Sci. Res. 2011, 8, 753–758. [Google Scholar]
- Wang, H.; Zhu, W.; Huang, Z.; Zhang, C.; Zhang, J. Research on the cone angle and clearance of main pump seal. J. Mech. Sci. Technol. 2015, 29, 2939–2947. [Google Scholar] [CrossRef]
- Xing, H.; Wang, Z.; Luo, X.; Cao, X.; Liu, C.; Zang, Y. General structure design and field experiment of pneumatic rice direct-seeder. Int. J. Agric. Biol. Eng. 2017, 10, 31–42. [Google Scholar]
- Ebrahem, I.A.; Amer, E.; Guidetti, R. A new small potato planter for Egyptian agriculture. J. Agric. Eng. 2011, 42, 7–13. [Google Scholar] [CrossRef]
- Ilyes, S.; Popescu, S.; Voicu, E. Experimental device for the researches on the precision of the tubers planting distance within the row for different potato planters. Res. People Actual Tasks Multidiscip. Sci. 2011, 2, 153–158. [Google Scholar]
- Kocher, M.F.; Coleman, J.M.; Smith, J.A.; Kachman, S.D. Corn seed spacing uniformity as affected by seed tube condition. Appl. Eng. Agric. 2011, 27, 177–183. [Google Scholar] [CrossRef]
- Hamad, S.A.; Ismail, Z.E.; Hemeda, M.A. Development of a potato planter to plant tuber pieces with previously grown buds. J. Agric. Sci. Mansoura Univ. 1994, 19, 2321–2343. [Google Scholar]
- Buitenwerf, H.; Hoogmoed, W.B.; Lerink, P.; Müller, J. Assessment of the Behaviour of Potatoes in a Cup-belt Planter. Biosyst. Eng. 2006, 95, 35–41. [Google Scholar] [CrossRef]
- Wang, Z. Design and Experimental of Metering Device of Cup-Belt Type Potato Planter. Master’s Thesis, Northeast Agricultural University, Harbin, China, 2015. [Google Scholar]
- Lv, J.; Wang, Y.; Li, Z.; Dui, H.; Liu, Z.; Li, J.; Sun, H.; Peng, M. Performance analysis and experiment of cup-belt type potato seed-metering device with flow deflector. Trans. Chin. Soc. Agric. Eng. 2017, 33, 19–28. [Google Scholar]
- Wollman, A.E.; Wollman, M.J. Potato Planters Improvement to Reduce Skips and Rolling. US20060283363A1, 12 December 2006. [Google Scholar]
- Lü, J. Mechanism and Parameter Optimization about Key Equipment of Pneumatic Potato Precision Planter; Heilongjiang Bayi Agricultural University: Daqing, China, 2020. [Google Scholar]
- Liu, W. Design of Mechanical-Pneumatic Combined Metering Device for Potato; Shandong Agricultural University: Taian, China, 2019. [Google Scholar]
- Li, M. Design and Research on Pneumatic Metering Device with Cup Spoon Type for Potato. Master’s Thesis, Huazhong Agricultural University, Wuhan, China, 2017. [Google Scholar]
- Yang, D. Design on Research Pneumatic Metering Device with Horizontal Disc for Potato. Master’s Thesis, Huazhong Agricultural University, Wuhan, China, 2016. [Google Scholar]
- Li, Z.; Lei, X.; Cao, X. Design and experiment of pneumatic-typed precision centralized metering device for rapeseed. Trans. Chin. Soc. Agric. Eng. 2015, 31, 9–17. [Google Scholar]
- Li, M.; Liao, X.; Liao, Y. Analysis on seeding process of pneumatic cylinder-type centralized rapeseed precision metering device. Trans. Chin. Soc. Agric. Eng. 2014, 30, 17–27. [Google Scholar]
- Yang, L.; Yan, B.; Zhang, D. Research Progress on Precision Planting Technology of Maize. Trans. Chin. Soc. Agric. Mach. 2016, 47, 38–48. [Google Scholar]
- Mao, Q. Design and Research on Key Components of the Planter for Virus-Free Mini-Potato Seeds. Master’s Thesis, Huazhong Agricultural University, Wuhan, China, 2013. [Google Scholar]
- Meijer, E.N.C.; Frederiks, J. Development of an automatic planter for presprouted seed. Potato Res. 1975, 18, 451–454. [Google Scholar] [CrossRef]
- He, Y. Study on New Seed Arrangement Mechanism of Potato Planter. Master’s Thesis, China Agricultural University, Beijing, China, 2006. [Google Scholar]
- GRIMME GB230 Planter. [EB/OL]. Available online: https://www.grimme.com/de/producttypes/legetechnik/gb-230 (accessed on 1 July 2022).
- Gardner, J.S. New type potato planter invented. Am. Potato J. 1957, 34, 149–150. [Google Scholar] [CrossRef]
- Misener, G.C. Relative Performance Of Cup and Pick Type Potato Planters. Can. Agric. Eng. 1979, 21, 131–134. [Google Scholar]
- Chen, S. Study on the arrangement and supply device of potato planter. Cereals Oils Process. 1982, 5, 15–22. [Google Scholar]
- Boydaş, M.G.; Uygan, F. Influence of seed physical properties and speed on the external mechanical damage index and in-row spacing uniformity in an automatic potato planter. J. Agric. Sci. 2012, 18, 126–136. [Google Scholar]
- Liu, W.; He, J.; Li, H.; Li, X.; Lu, C.; Wei, Z.; Su, G.; Zhao, H.; Liu, P.; Wang, C. Seeding performance optimization on vibration-arranging type seeding device for potato micro-seed. Trans. Chin. Soc. Agric. Eng. 2019, 35, 1–11. [Google Scholar]
- Liao, Y.; Li, C.; Liao, X.; Wang, L. Research Progress of Seed Guiding Technology and Device of Planter. Trans. Chin. Soc. Agric. Eng. 2020, 51, 12. [Google Scholar]
- Lv, J.; Yang, Y.; Shang, Q.; Li, Z.; Li, J.; Liu, Z.; Wang, Y. Performance optimization test on air-suction potato seed metering device with positive pressure airflow and zero-speed seeding. Trans. Chin. Soc. Agric. Eng. 2016, 32, 40–48. [Google Scholar]
- Transce Agricultural Machinery. 1SL-6A Subsoiler. [EB/OL]. Available online: http://www.xs-tc.com/gengzhengdijixie/xinghao-1SL-6A_65.html (accessed on 1 July 2022).
- Transce Agricultural Machinery.1LF-550 Flipped Plow. [EB/OL]. Available online: http://www.xs-tc.com/gengzhengdijixie/xinghao-1LF-550_1.html (accessed on 1 July 2022).
- BOMET U473 Cultivators. [EB/OL]. Available online: https://spedo.it/en/products/ridgers/bed-former/ (accessed on 1 July 2022).
- Spedo VB4F/75 Bed Former. [EB/OL]. Available online: https://spedo.it/en/products/ridgers/rotary-ridging-cultivator-with-bed-former/ (accessed on 1 July 2022).
- GRIMME GF400 Planter. [EB/OL]. Available online: https://www.grimme.com/de/producttypes/bodenbearbeitung/gf-400 (accessed on 1 July 2022).
- Grimme GL420 Planter. [EB/OL]. Available online: https://www.grimme.com/de/producttypes/legetechnik/gl-420 (accessed on 1 July 2022).
- Dewulf CP42 Planter. [EB/OL]. Available online: https://www.dewulfgroup.com/en/product/planting/planters/miedema-cup-planters/cp-42 (accessed on 1 July 2022).
- Menoble 1240 Planter. [EB/OL]. Available online: http://www.menoble.com (accessed on 23 February 2022).
- Spedo SPA/A Potato Planter. [EB/OL]. Available online: https://spedo.it/en/products/potato-planter/automatic-potato-planter/ (accessed on 1 July 2022).
- Bomet Sp. z o.o. Sp. K. Planter. [EB/OL]. Available online: https://www.bomet.pl/One-row-potato-planter-Gemini.html (accessed on 1 July 2022).
- SWAN AGRO NSE PPR-2 Potato Planter. [EB/OL]. Available online: https://swanagro.in/index.php/product_detail?pdetid=29 (accessed on 1 July 2022).
- Crary Lockwood 606 Planter. [EB/OL]. Available online: http://www.lockwoodmfg.com/Lockwood-Potato-Equipment/Planters/AirCupSSeriesPlanter (accessed on 1 July 2022).
- ERME PLPS Planter. [EB/OL]. Available online: http://www.erme-france.com/product/single-row-mechanical-garlic-onion-planter/3007/0 (accessed on 1 July 2022).
- Dewulf Miedema Structural 30 Planter. [EB/OL]. Available online: https://www.dewulfgroup.com/en/product/planting/planters/structural-belt-planters/structural-30 (accessed on 1 July 2022).
- Standen Engineering ZENO 21 Planter. [EB/OL]. Available online: https://standen.co.uk/products/planters/ (accessed on 1 July 2022).
- Crary Lockwood Needle-Type Potato Planter. [EB/OL]. Available online: http://www.lockwoodmfg.com/Lockwood-Potato-Equipment/Planters/PickPlanters# (accessed on 1 July 2022).
- Harriston Pick Planter. [EB/OL]. Available online: https://www.harriston-mayo.com/harriston/pick-planter.php (accessed on 1 July 2022).
- Harriston Clamp Planter. [EB/OL]. Available online: https://www.harriston-mayo.com/harriston/clamp-planter.php (accessed on 1 July 2022).
- Velandiaa, M.; Buschermohleb, M.; Larson, J.A.; Thompson, N.M.; Jernigan, B.M. The economics of automatic section control technology for planters: A case study of middle and west Tennessee farms. Comput. Electron. Agric. 2013, 95, 1–10. [Google Scholar] [CrossRef]
- Okada, Y.; Ishikawa, K.; Nagata, M. Studies on the precision seeding-seed metering system using bowl type feeder. J. Soc. Agric. Mach. 1982, 44, 431–437. [Google Scholar]
- Haase, W.C. Pioneer I—A Planter Computer system. ASAE 1986, 36, 135–145. [Google Scholar]
- Sun, W.; Liu, X. Design of potato casingsoil planter in all-in-one machine combined with fertilizing, sowing, ridging, complete film mulching and planting line covering. Trans. Chin. Soc. Agric. Eng. 2017, 33, 14–22. [Google Scholar]
- Liu, Q.; Wu, J.; Wang, D.; Sun, W.; Wang, G.; Shi, L. Current status and progress of the potato seeder. Agric. Mech. Res. 2013, 6, 238–241. [Google Scholar]
- GRIMME GB430 Planter. [EB/OL]. Available online: https://www.grimme.com/de/producttypes/legetechnik/gb-430 (accessed on 1 July 2022).
- Cao, D. Study On Loss Sowing Monitoring and Early Waning System of Potato Precision Seeder. Master’s Thesis, Northwest A&F University, Xianyang, China, 2013. [Google Scholar]
- Zhang, X. Design of Automatic Monitoring and Compensation System for Potato Planter; Gansu Agricultural University: Lanzhou, China, 2012; (In Chinese with English abstract). [Google Scholar]
- Liu, Q.; Wu, J.; Wang, D. Design and test of a microcomputer-controlled loss sowing compensation system for 2CM-2 potato seeder. Agric. Res. Arid. Areas 2013, 31, 260–266, (In Chinese with English abstract). [Google Scholar]
- Sun, W.; Wang, G.; Wu, J. Design and experiment on loss sowing testing and compensation system of spoon-chain potato metering device. Trans. Chin. Soc. Agric. Eng. 2016, 32, 8–15. [Google Scholar]
- Wang, F.; Sun, C.; Shi, D.; Li, X.; Wei, C.; Su, G.; Wang, X. Development of the Intelligent Precision Planting System of the Potato. J. Agric. Mech. Res. 2017, 39, 107–111+117. [Google Scholar]
- Zhu, L.; Wang, G.; Sun, W.; Zhang, H.; Liu, X.; Feng, B.; Wang, C.; Sun, L. Development of potato seed-metering state monitoring system based on space capacitance sensors. Trans. Chin. Soc. Agric. Eng. 2021, 37, 34–43. [Google Scholar]
- Wang, G.; Sun, W.; Zhang, H.; Liu, X.; Zhu, L. Research on a kind of seeding-monitoring and compensating control system for potato planter without additional seed-metering channel. Comput. Electr. Agric. 2020, 177, 105681. [Google Scholar] [CrossRef]
- Wang, X. Design and Experimental Research on Double-row Criss-cross Spoon-belt Potato Precision Seed Metering Device. Master’s Thesis, Northeast Agricultural University, Wuhan, China, 2016. [Google Scholar]
- Zou, J. Study on the application of ridge planting contour seeder for potato and its seeding method. Farm Mach. 2018, 10, 79–81. [Google Scholar]
- Hu, Z.; Yue, R.; Zhu, S. Design and Test of 2CMW-4B Mini-potato Planter. J. Agric. Mech. Res. 2019, 41, 60–64. [Google Scholar]

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | China | U.S.A. | Britain | Germany | Russia | Category |
|---|---|---|---|---|---|---|
| 2015 | 4788.1 | 426.7 | 129.0 | 236.7 | 2111.6 | Harvested Area/thousand ha |
| 2016 | 4805.1 | 419.9 | 139.0 | 242.6 | 1425.6 | |
| 2017 | 4862.4 | 422.7 | 146.0 | 250.5 | 1335.6 | |
| 2018 | 4760.7 | 414.1 | 140.0 | 252.2 | 1313.5 | |
| 2019 | 4038.9 | 379.3 | 144.0 | 271.6 | 1238.6 | |
| 2020 | 4218.2 | 369.9 | 142.0 | 273.5 | 1178.1 | |
| 2015 | 82,893.2 | 20,012.7 | 5644.3 | 10,370.3 | 33,645.8 | Production/thousand tons |
| 2016 | 84,986.5 | 20,426.4 | 5394.7 | 10,772.2 | 22,463.5 | |
| 2017 | 88,536.4 | 20,453.4 | 6218.0 | 11,720.4 | 21,707.6 | |
| 2018 | 90,321.4 | 20,607.3 | 5027.7 | 8921.0 | 22,395.0 | |
| 2019 | 75,657.9 | 19,251.3 | 5307.0 | 10,602.2 | 22,074.9 | |
| 2020 | 78,236.6 | 18,789.9 | 5520.0 | 11,715.1 | 19,607.4 |
| Year | China | U.S.A. | Britain | Germany | Russia | Category |
|---|---|---|---|---|---|---|
| 2015 | 17.31 | 46.90 | 43.75 | 43.81 | 15.93 | Yield/t/ha |
| 2016 | 17.69 | 48.65 | 38.81 | 44.40 | 15.76 | |
| 2017 | 18.21 | 48.39 | 42.59 | 46.79 | 16.25 | |
| 2018 | 18.97 | 49.76 | 35.91 | 35.37 | 17.05 | |
| 2019 | 18.73 | 50.75 | 36.85 | 39.04 | 17.82 | |
| 2020 | 18.55 | 50.79 | 38.87 | 42.83 | 16.64 |
| Type | Principle |
|---|---|
| Cup-belt (chain)-type seed metering device | The power of the seed belt (chain) is provided by the ground wheel or hydraulic motor, which drives the driving wheel to rotate through the transmission system. The seeds flow to the feeding area at the bottom of the seed box under gravity. In the forward motion of the seed belt/chain, the spoon mounted on the belt (chain) scoops up the seed potatoes in proper sequence. After the seeds shift to the seed clearing area, the excess materials are removed by the seed clearing device and returned to the seed box. When the cup reaches the highest point, the potato seeds fall on the back of the next cup. Potato seeds are carried by the cups to the seeding point, then dropped into the bottom of the seed furrow [36,37]. |
| Pneumatic-type seed metering device | The seed-suction arm is driven to rotate by power. When the seed-suction arm is connected with the vacuum chamber, the seed-suction arm absorbs a single seed potato from the seed hopper by negative pressure, and stably carries the seed potato to rotate synchronously with the seed metering device. As the potatoes reach the release point, they fall into the seedbed by positive pressure and gravity [17,38,39]. |
| Moving-belt-type seed metering device | When the seeds fall from the seed box to the conveyor belt, the transport speed of the two sides belt is opposite to that of the middle belt, where the middle belt is used to sort the seeds in a single row for seeding, and the two side belts are used to transport and collect the excess seeds to the seed collection port for preparation for subsequent seeding. |
| Needle-stabbed-type seed metering device | The needles are mounted on the circumference of the seeding rotary disk. Each needle stabs and obtains one seed in turns in the seed hopper. With the rotation of the seeding disk to the seed dropping area, the seed potatoes are separated from the needles under the function of scraping components and discharged into seed bed, completing a seeding process [40,41]. |
| Pickup-finger seed metering device | The Pickup-fingers are mounted on the circumference of the seeding rotary disk. Under the elastic force, The pickup-finger is in a normally closed state. The finger arm touches the guide rail and opens in sequence when traveling to a feeding area, and each finger on the vertical disk picks up a seed and moves with it to the next area under rotation condition, the arm meets another set of guide rails, and opens in sequence again [42]. |
| Vibration separation-type seed metering device | The conveyor belt is combined with the principle of forced vibration, and the potatoes are filled into the groove with manual assistance to achieve the function of separation and sorting. The grooves move with the movement of the conveyor belt, and at the release point the potatoes will fall into the seedbed to finish seeding. |
| Model | Structure | Characteristic |
|---|---|---|
| Shandong Transce Agricultural Machinery 1SL-6A subsoiler [66] |  | Matched type, mounted; six seeding plough; minimum required power, 135 hp; pure weight, 1500 kg; The depth of the sub-soiling, 400–500 mm. The subsoiling shovel adopts a particular arc inverted ladder-type design. The operation does not disturb the soil and does not turn over the soil to achieve all-round Subsoiling. |
| Shandong Transce Agricultural Machinery 1LF-550 flipped plow [67] |  | Matched-type, mounted; six seeding plows; minimum required power, 65 hp; pure weight, 1300 kg; working width, 132/152/176/200 cm; the depth of tillage, 350–400 mm. The hydraulic piston rod drives the positive and negative plow on the plow frame to make vertical turnover movement and replace it alternately to the working position. |
| BOMET U473 Cultivators Dorado [68] |  | Matched-type, mounted; three rows; minimum required power, 38 hp; working depth, 13 cm; pure weight, 180 kg; working width, 210 cm; the depth of tillage, 130 mm. The essential equipment of the machine is two supporting wheels that set the machine’s working depth. |
| SPEDO VB4F/75 Bed Former [69] |  | Matched-type, mounted; four rows; minimum required power, 70 hp; pure weight, 720 kg; distance between rows, 80 cm; working width, 340 cm; working length, 200 cm. The flex springs, positioned on the front part of the bed former, move the land allowing the furrowing plow discs to form regular and uniform beds. |
| GRIMME GF400 [70] |  | Matched-type, mounted; four rows; minimum required power, 134 hp; pure weight, 1800 kg; row width, 75–90 cm; working width, 3–3.6 m. The machine can also be used in combination with a potato planter, thus enabling soil cultivation and planting in a single pass. For soil cultivation and seeding of fine seeds in a single pass, the machine can be equipped with hydraulically driven ridge pressure rollers and a lifting frame for seeders. |
| Country | Model | Structure | Characteristic |
|---|---|---|---|
| Germany | Grimme GL420 [71] |  | Matched-type, trailed; four seeding rows; minimum required power, 120 hp; distance between rows, 75–90 cm; seed box capacity, 2 t. Equipped with a hydraulic control system and electronic monitoring system, combination with a cultivator is possible for optimum soil preparation. |
| USA | Double L9560 [12] |  | Matched-type, trailed; six seeding rows; matched power, 168 hp; distance between rows, 71.12–101.6 cm; seed box capacity, 6.6 t. Optical seed sensors are used to monitor seed picking. The planter is equipped with optical sensors and GPS to ensure seeding accuracy. |
| Holland | Dewulf CP 42 [72] |  | Matched-type, trailed; four seeding rows; distance between rows, 75–90 cm; seed hopper capacity, 3.6 t. It is mechanically or hydraulically driven and equipped with a human–computer interaction system and electronic monitoring system. |
| China | Menoble 1240 [73] |  | Matched-type, mounted; four seeding rows; minimum required power, 100 hp; distance between rows, 80/90 cm; seed box capacity, 1.2 t. Seeding unit equipped with electronic vibration mechanism equipped with hydraulic control rowers. |
| Italy | Spedo SPA/A [74] |  | Matched-type, mounted; two seeding rows; distance between rows, 70–90 cm; required power, 50 hp; two seeding units; weight, 480 kg; seed box capacity, 500 kg; seeding velocity, 0.4–0.6 ha/h. |
| Poland | Bomet Sp. z o.o. Sp. K. [75] |  | Matched-type, mounted; matched power, 20 hp; single one seeding row; distance between rows, 290/320/350 mm; planting depth, 100–150 mm; pure weight, 130 kg. Changing the distance of seed potatoes in a row can be achieved by changing the diameter of the wheels. |
| India | SWAN AGRO NSE PPR-2 [76] |  | Matched-type, mounted; two seeding rows; distance between rows, 60–66 cm; required power, 40–60 hp; seed hopper capacity, 0.24 t; planting depth, 130–150 mm; working efficiency, 0.51 ha/h. |
| Country | Model | Structure | Characteristic |
|---|---|---|---|
| USA | Crary Lockwood 606 [77] |  | Matched-type, mounted; six seeding rows; minimum required power, 20 hp; distance between rows, 80–100 cm; weight of the machine, 5 t; Seed hopper capacity, 5.44 t; maximum planting speed, 4.5 mph. The planter is equipped with hydraulic drive device and GPS navigation system, which can ensure high working speed and sowing quality. |
| Germany | Grimme Pneumatic precision mini-tuber planter |  | Matched-type, mounted; double seeding rows; minimum required power, 120 hp; distance between rows, 80–100 cm, the machine itself is 1.5 T. maximum working speed, 8.2 km/h. It uses a vertical disc potato row, has strict requirements on the uniformity of the appearance and size of potatoes, and has a high rate of heavily missed seeding. |
| French | ERME PLMS planter [78] |  | Matched-type, mounted; four seeding rows; minimum distance between rows, 35 cm. Drive wheels adjustable in height. |
| Country | Model | Structure | Characteristic |
|---|---|---|---|
| Germany | Grimme GB 230 [58] |  | Matched-type, mounted; minimum required power, 120 hp; distance between rows, 70–90.4 cm; maximum working speed, 25 km/h; seed hopper capacity, 3 t. Seeding parameters and seeding quantity can be adjusted through the operator terminal. |
| Holland | Dewulf Miedema Structural 30 [79] |  | Matched-type, trailed; three seeding rows; minimum required power, 80 hp; distance between rows, 4–100 cm; seed box capacity, 3.5 t; maximum working speed, 11 km/h. The inclination of the seed box is adjusted by a hydraulic drive. |
| England | Standen Engineering ZENO 21 [80] |  | Matched-type, mounted; two seeding rows; matched power, 102 hp; distance between rows, 76–102 cm. Equipped with a hydraulic control system to control depth. The uniformity of sowing is ensured by monitoring the speed with sensors. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, B.; Li, Y.; Zhang, C.; Cao, L.; Li, C.; Xie, S.; Niu, Q. Potato Planter and Planting Technology: A Review of Recent Developments. Agriculture 2022, 12, 1600. https://doi.org/10.3390/agriculture12101600
Zhou B, Li Y, Zhang C, Cao L, Li C, Xie S, Niu Q. Potato Planter and Planting Technology: A Review of Recent Developments. Agriculture. 2022; 12(10):1600. https://doi.org/10.3390/agriculture12101600
Chicago/Turabian StyleZhou, Baidong, Yexin Li, Cong Zhang, Liewang Cao, Chengsong Li, Shouyong Xie, and Qi Niu. 2022. "Potato Planter and Planting Technology: A Review of Recent Developments" Agriculture 12, no. 10: 1600. https://doi.org/10.3390/agriculture12101600