

Review and Prospect for Vegetable Grafting Robot and Relevant Key Technologies
 ,
,
Abstract
:1. Introduction
2. Development of Vegetable Grafting Robot
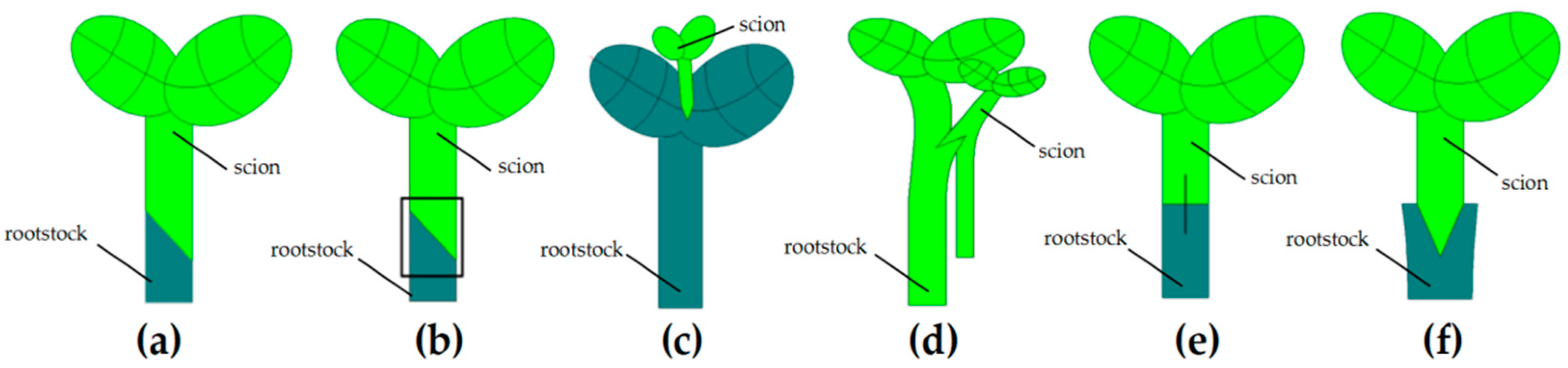
2.1. Research and Development of Vegetable Grafting Robot Based on Splice Grafting
2.2. Research and Development of Vegetable Grafting Robot Based on Tube Grafting
2.3. Research and Development of Vegetable Grafting Robot Based on Insertion Grafting
2.4. Research and Development of Other Vegetable Grafting Robots
3. Design of Key Parts and Components of the Vegetable Grafting Robot
3.1. Design of the Seedling Feeding Device
3.2. Design of the Clamping Device
3.3. Design of the Cutting Device
4. Applications of Machine Vision in Grafting Technology
4.1. Application in Feature Information Recognition
4.2. Application in Seedling Grading
4.3. Application in Other Ways
5. Existing Problems and Future Development
5.1. Existing Problems
5.1.1. Limited Grafting Rate
5.1.2. High Manufacturing Cost
5.1.3. Lack of Auxiliary Equipment for Grafting
5.2. Future Development
5.2.1. Automation and Intelligence of Vegetable Grafting Robot
5.2.2. Machine Vision AI Technology Based on Grafting Process and Automatic Diagnosis Technology
5.2.3. Low-Cost and High-Efficiency Grafting Robot
6. Conclusions
- (1)
- Combined with some related biological science and agronomy research, researchers in various countries have carried out a lot of research on vegetable grafting robots. In the process of their development from semi-automation to full automation, a large number of useful achievements have been obtained, and the grafting speed and survival rate have been greatly improved. Considering the development of disciplines such as agronomy and mechanical design, the current vegetable grafting robots based on the splice grafting method are more suitable for the development of mechanization and automation, which are the mainstream and development direction of future research.
- (2)
- With the rapid development of mechanical design and control theory, the design direction of the key grafting devices of vegetable grafting robots is gradually moving towards refinement and specialization, such as automatic seedling feeding, flexible clamping, and precision cutting. At the same time, the application of modern intelligent methods such as machine vision technology can extract feature information from seedlings, solve the impact of seedling differences and uncertainties on grafting, and truly realize the full automation of grafting. This is also one of the development directions of key technologies for vegetable grafting robots in the future.
- (3)
- With the continuous development of information technology and the gradual application of cloud computing and big data in the field of agriculture, the construction of intelligent agricultural systems has become the general direction of future development. Through modern sensing technology and Internet of things technology, timely collection of a large number of related data during the grafting process, the use of modern artificial intelligence methods such as data mining, deep learning, and cloud computing technology, timely data analysis and optimization of process parameters can be carried out for accurate grafting operations and intelligent management of facilities. At the same time, with the help of modern artificial intelligence, big data, and cloud computing methods, it is also an important task and challenge to construct the design model of vegetable grafting robots based on agronomy and mechanism.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Thakur, D. Role of grafting in vegetable crops: A review. J. Pharmacogn. Phytochem. 2020, 9, 1170–1174. [Google Scholar]
- Zhang, K.; Chu, J.; Zhang, T. Development Status and Analysis of Automatic Grafting Technology for Vegetables. Agric. Mach. J. 2017, 48, 1–13. [Google Scholar]
- Huang, Y.; Kong, Q.S.; Chen, F.; Bie, Z.L. The History, Current Status and Future Prospects of Vegetable Grafting in China. In Proceedings of the International Symposium on Vegetable Grafting, Charlotte, NC, USA, 14–18 July 2014; pp. 31–39. [Google Scholar]
- Belmonte-Urena, L.J.; Garrido-Cardenas, J.A.; Camacho-Ferre, F. Analysis of world research on grafting in horticultural plants. HortScience 2020, 55, 112–120. [Google Scholar] [CrossRef]
- Lee, J.M.; Kubota, C.; Tsao, S.J.; Bie, Z.; Echevarria, P.H.; Morra, L.; Oda, M. Current status of vegetable grafting: Diffusion, grafting techniques, automation. Sci. Hortic. 2010, 127, 93–105. [Google Scholar] [CrossRef]
- ISEKI CO D. Grafting Robot. Available online: https://www.youtube.com/watchv=0Aj7sfEuz18.html (accessed on 3 May 2022).
- Jiang, K.; Feng, Q.; Wang, X. Research trends of vegetable grafting robots in foreign countries. Agric. Eng. Technol. 2020, 40, 10. [Google Scholar]
- Conic System Inc. EMP-300. Available online: http://www.conic.system.com/wp/gallery/emp300/lang=es.html (accessed on 3 May 2022).
- Zhang, T. 2JSZ-600 automatic vegetable grafting machine. Rural Everything 2000, 42. [Google Scholar] [CrossRef]
- Yang, L.; Liu, C.; Zhang, T. Design and experiment of vegetable grafting machine with double manipulators. Trans. Chin. Soc. Agric. Mach. 2009, 40, 175–181. [Google Scholar]
- Jiang, K.; Zhang, Q.; Wang, X. Design and experiment for automatic sequencing and supplying device of grafting clips. Trans. Chin. Soc. Agric. Mach. 2012, 256–261. [Google Scholar]
- Chu, J.; Zhang, T. Design and experiment of vegetable grafting robot operated by one-person for cucurbitaceous seedlings cultivated in humus pot. Trans. Chin. Soc. Agric. Mach. 2014, 259–264. [Google Scholar]
- Jiang, K.; Zheng, W.; Zhang, Q.; Guo, R.; Feng, Q. Design and experiment of grafting device for solanaceous vegetable. Agric. Mech. Res. 2015, 37, 131–135. [Google Scholar]
- Liu, K.; Yang, Y.; Li, K.; Chu, Q.; Zhong, L.; Gu, S. Study on semi-automatic grafting machine for solanaceous seedlings based on pipelined production process. Mod. Agric. Equip. 2020, 41, 27–32. [Google Scholar]
- Fu, X.; Shi, J.; Huang, Y.; Zhu, E.; Bie, Z.; Lin, W. Design and experiment of full-tray grafting device for grafted melon seedling production. Agriculture 2022, 12, 861. [Google Scholar] [CrossRef]
- Liu, B. Research status and development trend of vegetable grafting machine. Use Maint. Agric. Mach. 2015, 19, 52–53. [Google Scholar]
- Gu, S. An introduction on the development of industrial growing system of vegetable grafting seedlings. Agric. Mech. Res. 2005, 27, 52–54. [Google Scholar]
- ISO Group, Inc. ISO Graft 1200. Available online: https://www.iso-group.nl/nl/machines/iso-graft-1200.html (accessed on 5 May 2022).
- ISO Group, Inc. ISO Graft 1100. Available online: https://www.iso-group.nl/nl/machines/iso-graft-1100.html (accessed on 7 May 2022).
- Jia, C.; Tiezhong, Z.; Libo, Z.; Wenbo, Z.; Tao, W.; Quan, Y. Design and experiment of tube-outputting device for vegetable grafting machine using tube-grafting method. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2016, 47. [Google Scholar] [CrossRef]
- Gu, S. Development of 2JC-350 automatic grafting machine with cut grafting method for vegetable seedling. Trans. Chin. Soc. Agric. Eng. 2006, 22, 103–106. [Google Scholar]
- Zhou, X.; Gu, S.; Jiang, K. Study on 2JC-450 grafting machine. Agric. Mech. Res. 2009, 31, 93–95. [Google Scholar]
- Zou, G.; Suo, R.; Gu, S. 2JC-500 rotary vegetable grafting machine. China Agric. Mech. 2009, 82–84. [Google Scholar]
- Chu, Q.; Jiang, K.; Liu, K.; Gu, S. Experimental study on 2JC-600 automatic grafting machine. Agric. Mech. Res. 2011, 33, 183–185. [Google Scholar]
- Jiang, K.; Gu, S.; Zheng, W.; Zhang, Q.; Sun, G.; Guo, R. Design and experiment of automatic grafting machine of cucurbits. Agric. Mech. Res. 2010, 32, 129–132. [Google Scholar]
- Chu, Q.; Liu, K.; Yang, Y. Development of Automatic Grafting Machine. In Proceedings of the 2011 Annual Academic Meeting of the Chinese Society of Agricultural Engineering, Chongqing, China, 22–24 October 2011; pp. 1–4. [Google Scholar]
- Liu, K.; Jiang, K.; Mu, Y. Development of a vision guided robot for grafting watermelon based on hole insertion method. J. Phys. Conf. Ser. IOP Publ. 2020, 1575, 012106. [Google Scholar] [CrossRef]
- EC21 Inc. Supreme Precision Grafting Robot. Available online: https://helpersys.en.ec21.com/Supreme-Precision-Grafting-Robot--2012260_2012262.html (accessed on 9 May 2022).
- Qian, D.; Liang, X.; Zhang, Y.; Pang, J. Portable vegetable automatic grafting machine. Agric. Dev. Equip. 2012, 3, 27–29. [Google Scholar]
- Ingber, D.E. JS-6 type a group of six vegetables automatic grafting machine was successfully developed. Agric. Sci. Technol. Inf. 2018, 95. [Google Scholar]
- Wang, Z. Design and Experimental Study on the Equipment of Feed Seedling to the Grafting Robot for Fruits and Vegetables; Zhejiang Sci-Tech University: Hangzhou, China, 2013. [Google Scholar]
- Xiang, W. The Research of Direct Insert Type Automatic Grafting Machine for Vegetables; Zhejiang Sci-Tech University: Hangzhou, China, 2010. [Google Scholar]
- Shen, W.; Zhang, L. Research on the automatic seedling feeder in the vegetable grafting robot. Light Ind. Mach. 2010, 28, 22–26. [Google Scholar]
- Song, C. Design and Experimental Study on Intelligent Grading and Seedling Device of Muskmelon Automatic Grafting Machine; Shenyang Agricultural University: Shenyang, China, 2016. [Google Scholar]
- Pan, J. Key Device Design and Experimental Study on Automation Grafting Process; Zhejiang Sci-Tech University: Hangzhou, China, 2017. [Google Scholar]
- Peng, Y.; Gu, S.; Chu, Q.; Zhang, Q.; Xu, X.; Li, B.; Wang, Y. Design of stock feeding device of grafting robot for solanaceae. Trans. Chin. Soc. Agric. Eng. 2016, 32, 76–82. [Google Scholar]
- Jiang, K.; Chen, L.; Zhang, Q. Design and experiment on flexible clamping and conveying mechanism of vegetable grafting robot. Trans. Chin. Soc. Agric. Mach. 2020, 51, 63–71. [Google Scholar]
- Lou, J.; Li, J.; Zhu, P.; Lü, G. Design and test of stock clam ping mechanism for vegetable grafting. Trans. Chin. Soc. Agric. Eng. 2013, 29, 30–35. [Google Scholar]
- An, Y.; Junhua, T.; Jinhui, P. Design of seedling taking positioning and clamping device for melon grafting machine. Agric. Mech. Res. 2017, 39, 129–134. [Google Scholar]
- Li, Y.; Liu, K.; Gu, S. Design and experiment of rootstock holding and cutting mechanism of automatic grafting machine. Agric. Mech. Res. 2011, 33, 88–91. [Google Scholar]
- Jiang, K.; Gu, S.; Liu, F. Clipping mechanism of stock for 2JC-500 grafting machine. Agric. Mech. Res. 2008, 39, 116–118. [Google Scholar]
- Xia, C.; Cao, Q.; Yang, Y. Optimization design on end effector of grafted seedlings transplanting robot. Chin. J. Agric. Mach. Chem. 2016, 37, 37–42. [Google Scholar]
- Yang, Y.; Li, K.; Chu, Q.; Zhong, L.; Jia, D.; Gu, S. Air suction clamp structure of rootstock cotyledons for inclined inserted grafting machine and its optimized experiment of operation parameters. Trans. Chin. Soc. Agric. Eng. 2014, 30, 25–31. [Google Scholar]
- Li, M.; Dai, S.; Tang, C.; Xiang, Y. Simulation test on plantlet-cutting mechanism of grafting robot. Trans. Chin. Soc. Agric. Eng. 2008, 24, 129–132. [Google Scholar]
- Xu, L.; Zhang, T.; Liu, C. Study on robot system for auto-grafting of vegetable—Design of the rotary cutting mechanism. J. China Agric. Univ. 2000, 5, 34–36. [Google Scholar]
- Liang, Y.; Wei, H.; Ma, Z. Study on the key mechanism in cucurbits grafting machine for hole inserting grafting. Mod. Agric. Equip. 2014, 51–56. [Google Scholar]
- Tang, X.; Sun, Z.; Zhao, P. Research of rootstock clamping, conveying and grafting device with soil supporting mechanism. Chin. J. Agric. Mach. Chem. 2016, 37, 41–43. [Google Scholar]
- Li, Y.; Liu, K.; Jiang, K. Optimization and experiment of working parameters of cutting device for solanaceous vegetable grafting machine. Mech. Des. Manuf. Eng. 2020, 49, 43–47. [Google Scholar] [CrossRef]
- Tian, S.; Song, C.; Dong, S.; Wang, R. Parameter optimization and experiment for cutting device of muskmelon grafting machine. Trans. Chin. Soc. Agric. Eng. 2016, 32, 86–92. [Google Scholar]
- Bai, Z.; Xia, L.; Lu, X. Improved design of high-speed cutting and conveying device for seedling grafting of plug-type vegetables. Agric. Eng. Technol. Greenh. Hortic. 2020, 40, 18. [Google Scholar]
- He, L.; Cai, L.; Wu, C. Vision-based parameters extraction of seedlings for grafting robot. Trans. Chin. Soc. Agric. Eng. 2013, 29, 190–195. [Google Scholar]
- Xu, L.; Cui, Y.; Tian, Y. Recognition Method of grafted seedling characteristics based on machine vision. Agric. Eng. 2018, 8, 20–24. [Google Scholar]
- Zhou, L.; Gong, Z.; Fei, H.; Cheng, W.; Zha, Y.; Yu, Q. Extraction of parameters of cucurbitaceae rootstock seedlings based on machine vision. Trop. Agric. Eng. 2021, 45, 1–6. [Google Scholar]
- Zhang, L.; He, H.; Wu, C. Vision method for measuring grafted seedling properties of vegetable grafted robot. J. Agric. Eng. 2015, 31, 32–38. [Google Scholar]
- Gong, Z. Study on Automatic Orientation System of Stock in Vegetable Automation Grafting Based on Image Processing Technology; China Agricultural University: Beijing, China, 2003. [Google Scholar]
- Li, Z. Studies on Automatic Orientation Cutting System of Stock in Vegetable Automation Grafting Based on Machine Vision; Hunan Agricultural University: Changsha, China, 2007. [Google Scholar]
- Liu, K.; Gu, S. The research on identification of seedling based on machine vision. Agric. Mech. Res. 2009, 31, 46–48. [Google Scholar]
- Zhao, X.; Wang, Z.; Liu, S.; Wang, R.; Tian, S. Grading System of Tomato Grafting Machine Based on Machine Vision. In Proceedings of the 2015 8th International Congress on Image and Signal Processing (CISP), Shenyang, China, 14–16 October 2015; pp. 604–609. [Google Scholar]
- Ashraf, M.A.; Kondo, N.; Shiigi, T. Use of machine vision to sort tomato seedlings for grafting robot. Eng. Agric. Environ. Food 2011, 4, 119–125. [Google Scholar] [CrossRef]
- Wang, Z. Design on Vision System of Melon Automatic Grafting Machine Based on Halcon; Shenyang Agricultural University: Shenyang, China, 2016. [Google Scholar]
- Kang, D.H.; Lee, S.Y.; Kim, J.K.; Park, M.J.; Son, J.K.; Yun, S.W. Development of an automatic grafting robot for fruit vegetables using image recognition. Prot. Hortic. Plant Fact. 2019, 28, 322–327. [Google Scholar] [CrossRef]
- Xu, P.; Zhang, T.; Chen, L.; Huang, W.; Jiang, K. Study on the method of matched splice grafting for melon seedlings based on visual image. Agriculture 2022, 12, 929. [Google Scholar] [CrossRef]
- Liu, S.; Xing, Z.; Wang, Z.; Tian, S.; Jahun, F.R. Development of a machine-vision system for gap inspection of muskmelon grafted seedlings. PLoS ONE 2017, 12, e0189732. [Google Scholar] [CrossRef]
- Tian, S.; Ashraf, M.A.; Kondo, N.; Shiigi, T.; Momin, M.A. Optimization of machine vision for tomato grafting robot. Sens. Lett. 2013, 11, 1190–1194. [Google Scholar] [CrossRef]
- Liu, Y. Application analysis of intelligent robots in the field of agricultural automation. Agric. Technol. Equip. 2019, 349, 14–16. [Google Scholar]
- Devi, P.; Lukas, S.; Miles, C. Advances in watermelon grafting to increase efficiency and automation. Horticulturae 2020, 6, 88. [Google Scholar] [CrossRef]
- Jin, Y.; Liu, J.; Xu, Z.; Yuan, S.; Li, P.; Wang, J. Development status and trend of agricultural robot technology. Int. J. Agric. Biol. Eng. 2021, 14, 1–19. [Google Scholar] [CrossRef]
- Zhao, J.; Yang, Y.; Zheng, H.; Dong, Y. Global agricultural robotics research and development: Trend forecasts. J. Phys. Conf. Ser. IOP Publ. 2020, 1693, 012227. [Google Scholar] [CrossRef]
- Abd AL-Razaq, A.H. Grafting techniques in vegetables crops: A review. Plant. Arch. 2019, 19, 49–51. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time | Model | Research Unit | Suitable Object | Productivity (Plants/h) | Survival Rate | Automaticity |
|---|---|---|---|---|---|---|
| 1994 | GR800 | ISEKI, Japan | Melon and Solanaceae vegetables | 800 | 95% | Semi-automatic |
| 1994 | AG1000 | Yanmar, Japan | Solanaceae vegetables | 1000 | 97% | Full-automatic |
| 1998 | 2JSZ-600 | China Agricultural University | Melon vegetables | 600 | 95% | Semi-automatic |
| 2009 | 2JSZ-600B | China Agricultural University | Melon and Solanaceae vegetables | 854 | 95% | Full-automatic |
| 2010 | EMP300 | Conic System, Spain | Solanaceae vegetables | 400~600 | 98% | Semi-automatic |
| 2011 | TJ-800 | 1 | Melon and Solanaceae vegetables | 800 | 95% | Semi-automatic |
| 2011 | GRF800-U | ISEKI, Japan | Melon vegetables | 800 | 95% | Full-automatic |
| 2014 | 2 | China Agricultural University | Melon vegetables | 440 | 92% | Full-automatic |
| 2015 | 3 | 4 | Solanaceae vegetables | 512 | 99.5% | Automatic |
| 2020 | 5 | South China Agricultural University | Solanaceae vegetables | 1000 | - | Semi-automatic |
| 2021 | JFT-A1500T | 6 | Melon and Solanaceae vegetables | 1500 | 98% | Semi-automatic |
| 2022 | HAU-22 | Huazhong Agricultural University | Melon vegetables | 2134 | 67% | Full-automatic |
| Time | Model | Research Unit | Suitable Object | Productivity (Plants/h) | Survival Rate | Automaticity |
|---|---|---|---|---|---|---|
| 1992 | MGM600 | Mitsubishi Group, Japan | Solanaceae vegetables | 600 | 95% | Semi-automatic |
| 2003 | T600 | Yanmar, Japan | Melon vegetables | 600 | 98% | Semi-automatic |
| 2007 | Graft1000 | ISO Group, Netherlands | Solanaceae vegetables | 1000 | 99% | Full-automatic |
| 2010 | Graft1200 | ISO Group, Netherlands | Melon and Solanaceae vegetables | 1050 | 99% | Full-automatic |
| 2014 | Graft1100 | ISO Group, Netherlands | Melon and Solanaceae vegetables | 1000 | 98% | Semi-automatic |
| 2016 | 1 | China Agricultural University | - | - | - | Full-automatic |
| Time | Model | Research Unit | Suitable Object | Productivity (Plants/h) | Survival Rate | Automaticity |
|---|---|---|---|---|---|---|
| 2006 | 2JC-350 | Northeast Agricultural University | Melon vegetables | 350 | >90% | Semi-automatic |
| 2009 | 2JC-450 | Northeast Agricultural University | Melon vegetables | 450 | >90% | Semi-automatic |
| 2009 | 2JC-500 | Northeast Agricultural University | Melon vegetables | 500 | >90% | Semi-automatic |
| 2010 | 2JC-1000A | 1 | Melon vegetables | 1000 | >90% | Full-automatic |
| 2011 | 2JC-600 | Northeast Agricultural University | Melon vegetables | 600 | >90% | Automatic |
| 2011 | 2 | South China Agricultural University | Melon vegetables | 600 | 95% | Semi-automatic |
| 2020 | 3 | 4 | Melon vegetables | - | 95.6% | - |
| Time | Model | Research Unit | Grafting Technology | Suitable Object | Productivity (Plants/h) | Survival Rate | Automaticity |
|---|---|---|---|---|---|---|---|
| 2004 | 1 | Ideal System, Korea | Pin grafting | Solanaceae vegetables | 1200 | 95% | Full-automatic |
| 2013 | AFGR-800CS | Helper Robotech, Korea | Approach grafting | Melon and Solanaceae vegetables | 800 | 95% | Full-automatic |
| 2018 | JS-6 | 2 | Cleft grafting | Solanaceae vegetables | 720 | 96% | Full-automatic |
| Device | Object | Method | Characteristic |
|---|---|---|---|
| Seedling feeding device | Rootstock | 2-PPA parallel mechanism | Automatic feeding seedling |
| Rootstock | Intelligent grading library | Intelligent classification | |
| Rootstock and scion | Screw and slide bar mechanism | Feed seedlings and break roots simultaneously | |
| Rootstock and scion | Conveyor chain and transfer handle | One person feeding seedlings | |
| Clamping device | Rootstock and scion | Buffer material | Flexible clamping |
| Rootstock | Clip piece and spring | Clamping force can be adjusted | |
| Scion | Y-cylinder and claw | Clip seedlings and break roots simultaneously | |
| Rootstock | Cylinder and collet | Integral clip body and independent collet | |
| Cutting device | Rootstock and scion | Rotary cutting | Synchronous cutting |
| Scion | Lateral slide cut | Cutting plane is neat | |
| Rootstock and scion | XY adjustment mechanism | Precise adjustment of cutter position | |
| Rootstock and scion | Multiple cutting blades side by side | Cut more seedlings |
| Application | Object | Method | Purpose | Success Rate |
|---|---|---|---|---|
| Identify the characteristic information of seedlings | Rootstock seedling | Ellipse fitting method | Cotyledon growth direction, location of growth points and leaf area | 97.5% |
| Rootstock seedling | Hough ellipse fitting | Cotyledon growth direction, location of growth points and leaf area | 85% | |
| Rootstock seedling | Minimum circumscribed circle method | Cotyledon opening Angle | 99. 58% | |
| Rootstock seedling | Integrated algorithm for image processing | Coordinates of growth points diameter of the long and short axes of the seedling stem section, and seedling length | - | |
| Classification of seedlings | Tomato seedlings | Statistical method of Pixel gray value accumulation | Curvature and diameter of seedlings | 96% |
| Seedling inspection | Grafting finished seedlings | Gap recognition algorithm | Check the clearance of the bonding surface | - |
| Auxiliary grafting | Drill the target point and scion | Machine Vision positioning technology | Positioning before drilling | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, G.; Feng, M.; Lin, W.; Huang, Y.; Tong, R.; Cheng, Y. Review and Prospect for Vegetable Grafting Robot and Relevant Key Technologies. Agriculture 2022, 12, 1578. https://doi.org/10.3390/agriculture12101578
Yan G, Feng M, Lin W, Huang Y, Tong R, Cheng Y. Review and Prospect for Vegetable Grafting Robot and Relevant Key Technologies. Agriculture. 2022; 12(10):1578. https://doi.org/10.3390/agriculture12101578
Chicago/Turabian StyleYan, Guoping, Maoshuo Feng, Weiguo Lin, Yuan Huang, Ruizheng Tong, and Yan Cheng. 2022. "Review and Prospect for Vegetable Grafting Robot and Relevant Key Technologies" Agriculture 12, no. 10: 1578. https://doi.org/10.3390/agriculture12101578