
Experimental Research on Grape Cluster Vibration Signals during Transportation and Placing for Harvest and Post-Harvest Handling

 ,
, 
Abstract
:1. Introduction
2. Materials and Methods
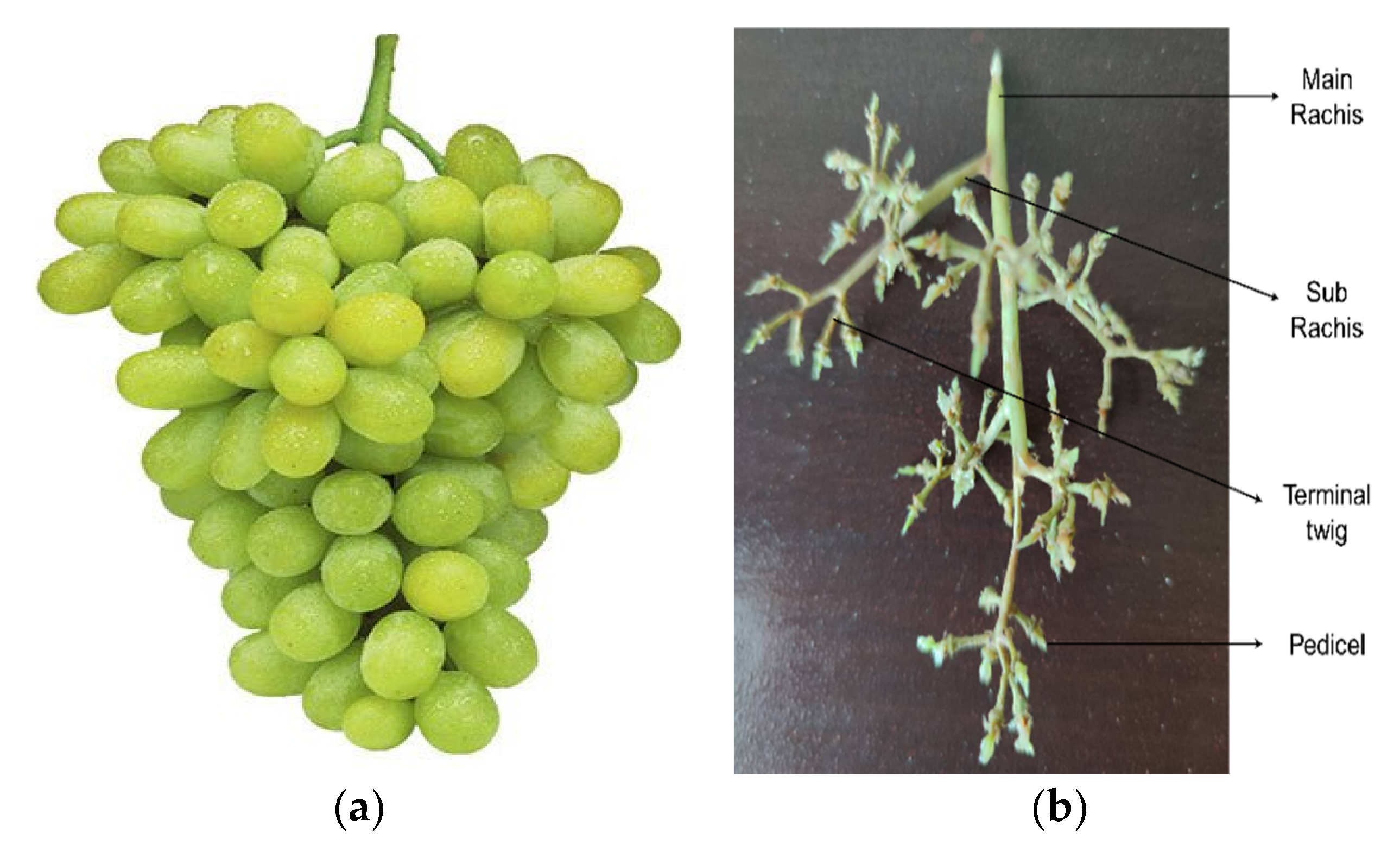
2.1. Structure of Fresh Grape Clusters
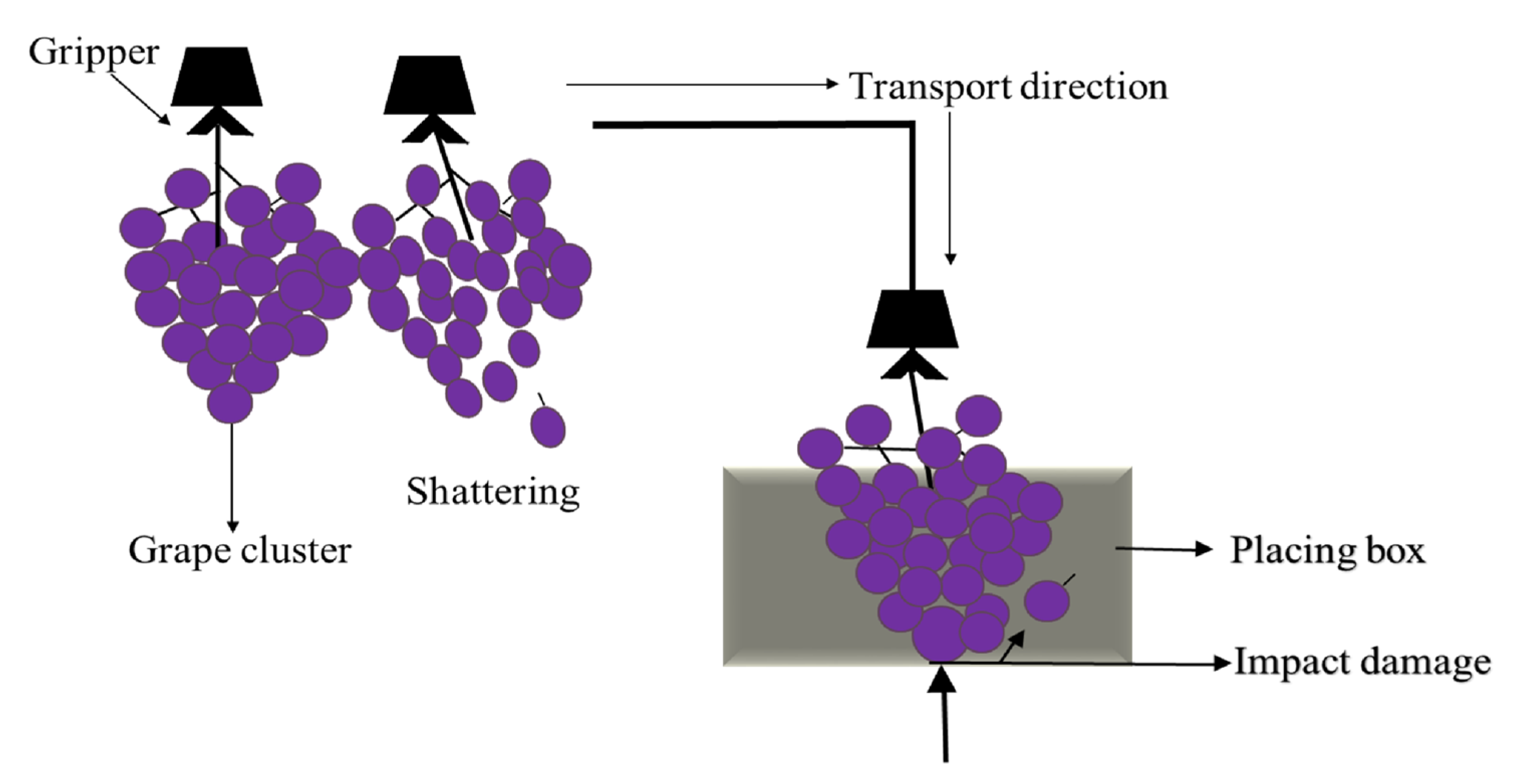
2.2. Different Excitations and Behaviour of Grape Cluster Fruit during Robotic Transportation and Placing
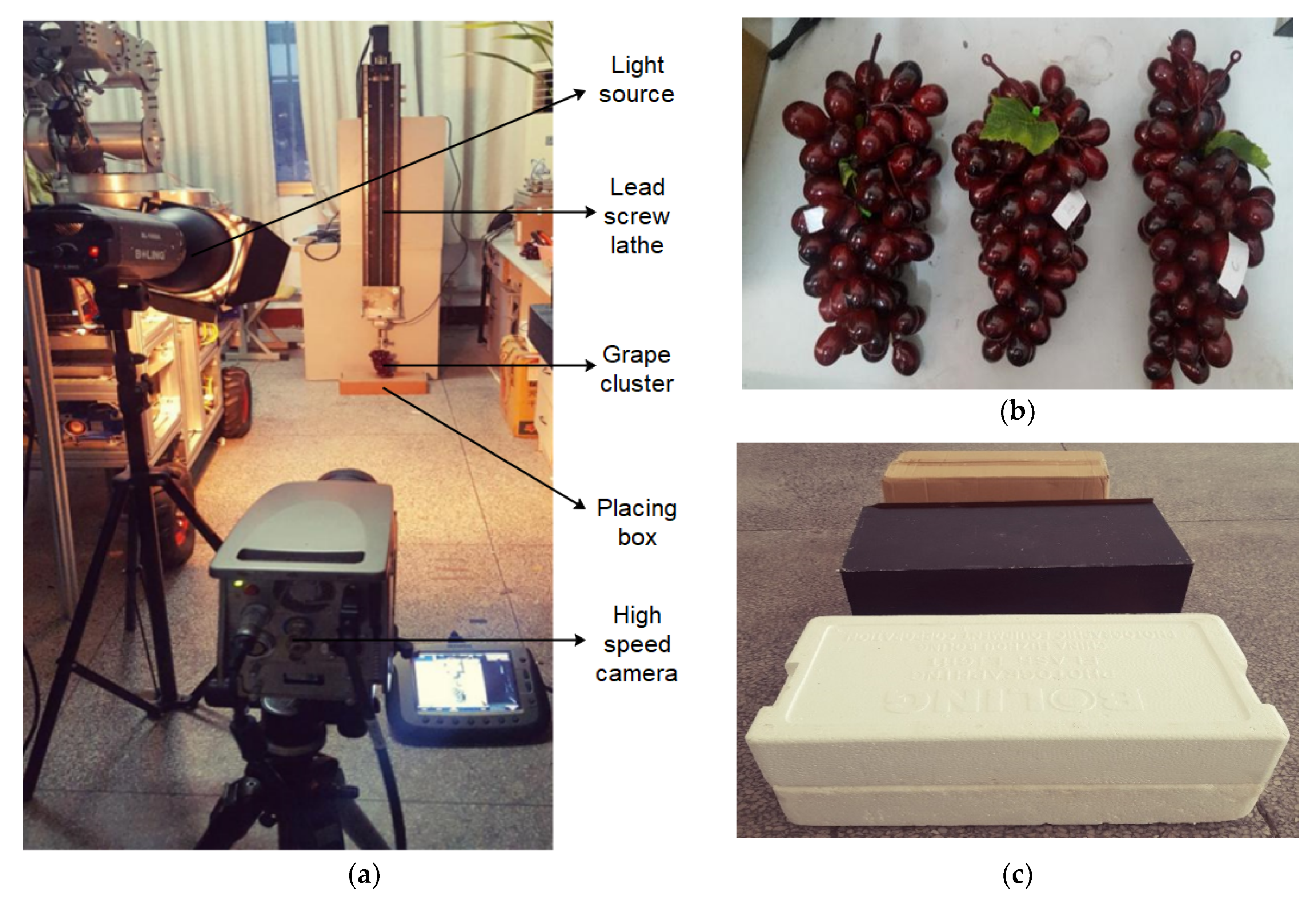
2.3. Experimental Materials
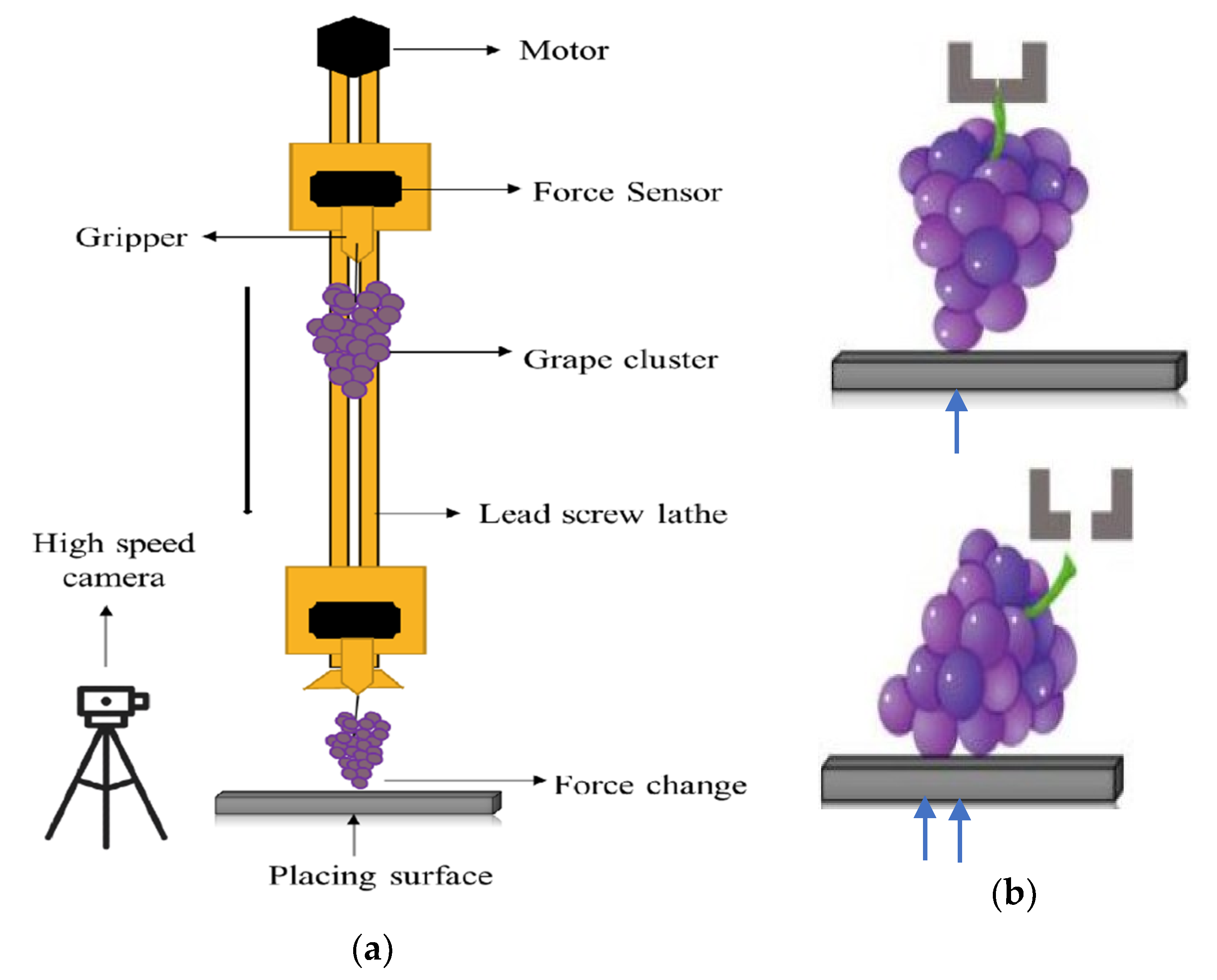
2.4. Experimental Methods
2.4.1. Vertical Transportation of Grape Cluster
2.4.2. Placing of Grape Cluster
3. Results
3.1. Vibration Characteristics during Vertical Transportation and Placing of Grape Cluster
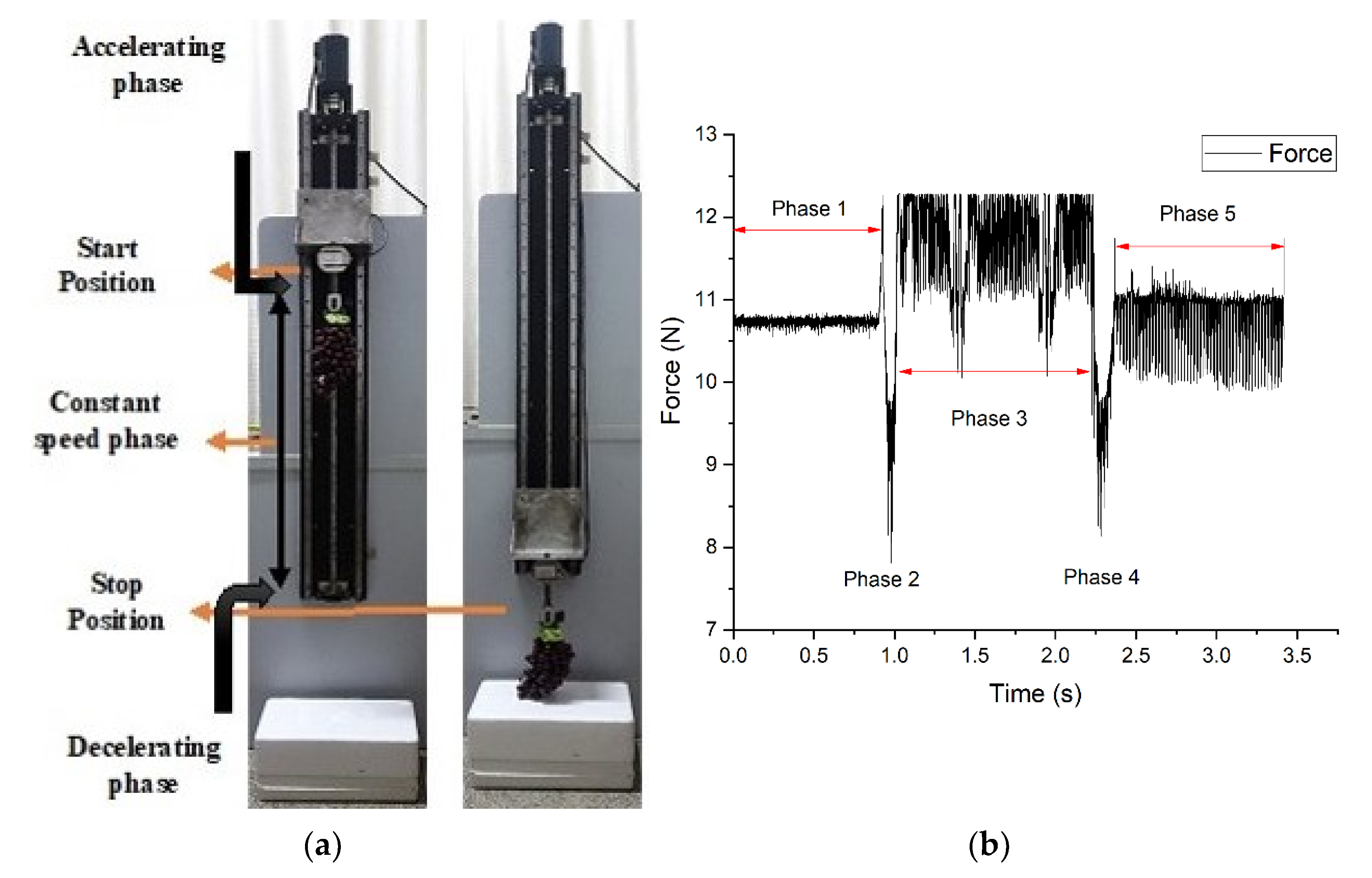
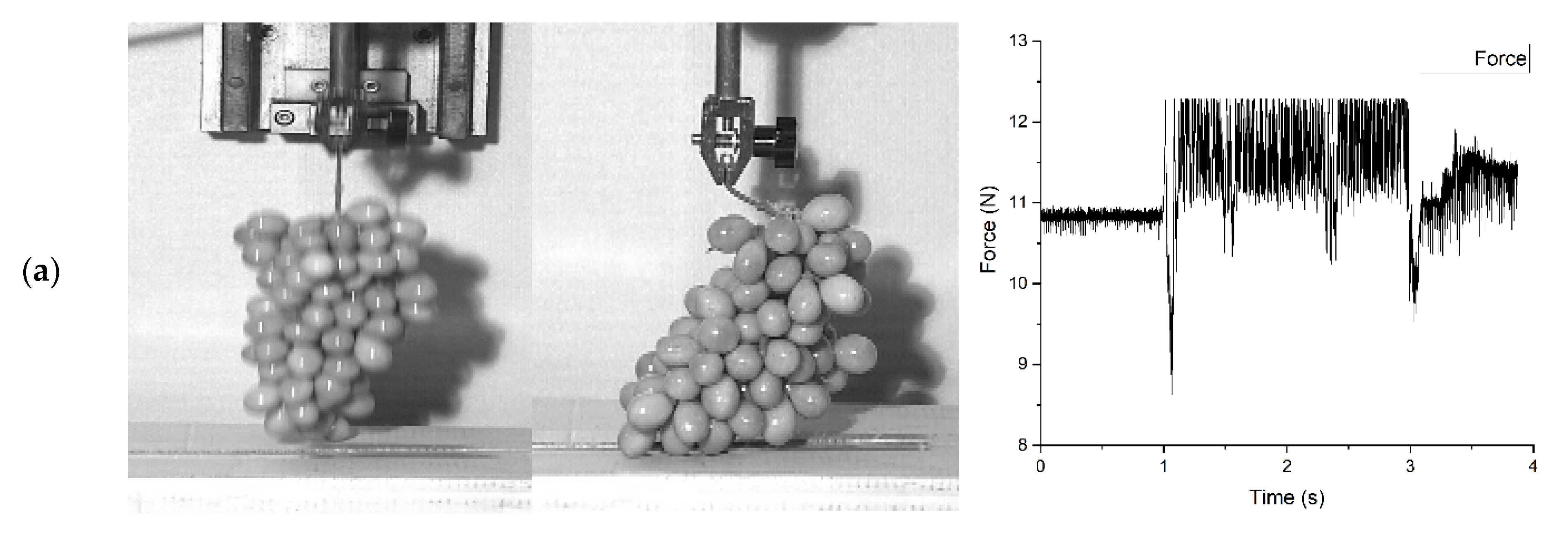
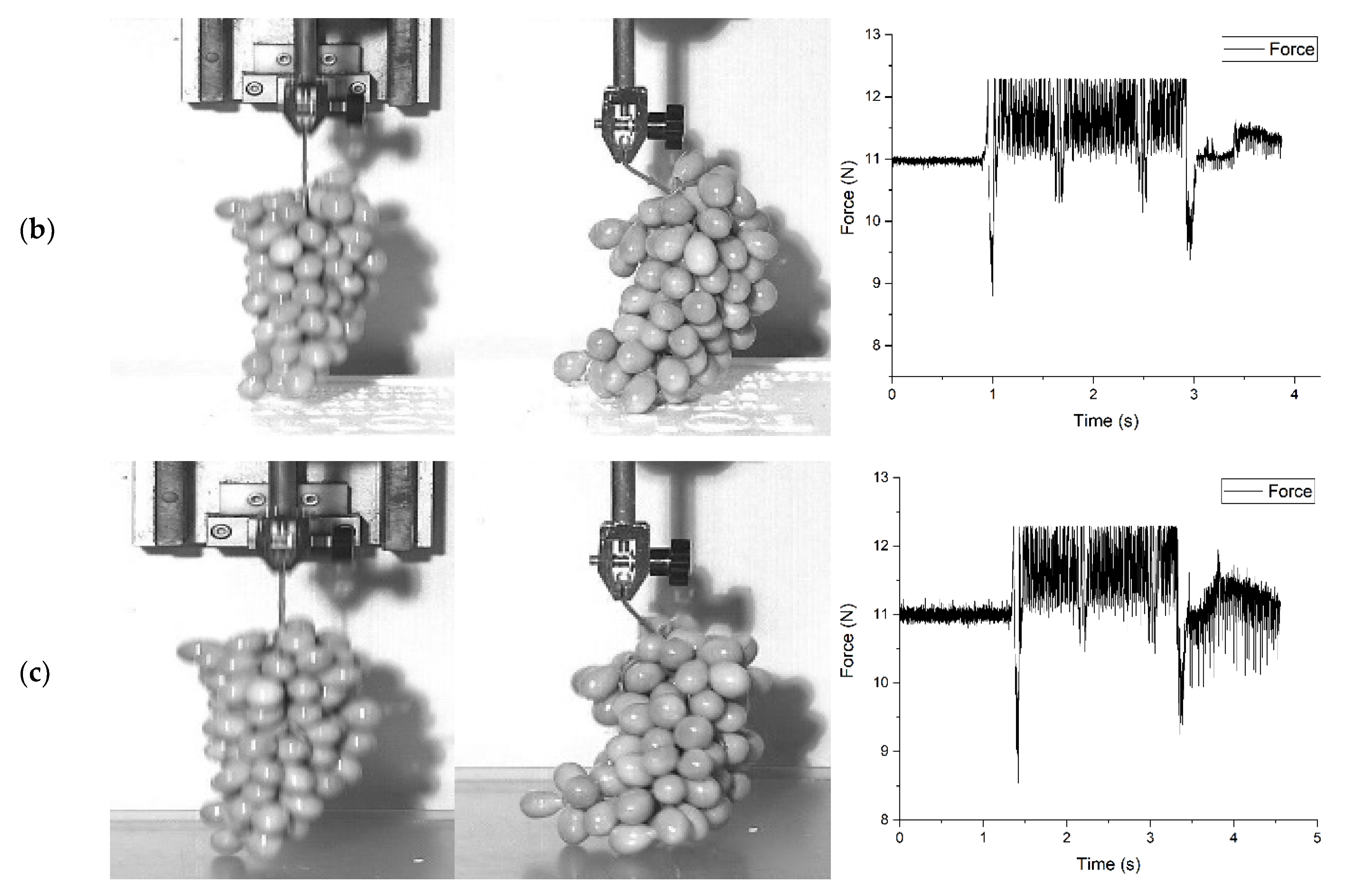
3.1.1. Different Stages of Vertical Transportation
- Phase 1 (stationary phase of the grape cluster): In this phase, the force signals showed that the hanging grape cluster is in the stationary position with its static weight (calibrated value of the hanging grape cluster).
- Phase 2 (accelerating phase): In this phase, when excitations were applied to the actuator (IDOF manipulator), it started to move, and the hanging grape cluster suddenly vibrated due to the movement of the actuator. Hence, the magnitude of the force signals is observed as high in this phase due to the high vibration of the cluster.
- Phase 3 (constant speed phase): In between Phase 2 and Phase 4, the force signal curve depicts that the cluster vibrates with constant amplitude due to the short interval of time.
- Phase 4 (deaccelerating phase): In the next phase, when the actuator was going to stop, a dramatic decrement in the magnitude of the force signals was observed, which shows the hanging grape cluster has reached a minimum position (lowest position) during the stop phase of the actuator’s motion. This is due to the excitation coming from the packaging surface to the whole cluster, which causes an impact on the whole cluster; the berries started to deflect in this phase.
- Phase 5 (placing phase): After the stop of the actuator in Zone 5, all the excitation energy comes from the packaging material storing the grape cluster; the impact with the grape cluster becomes the reason for the berries falling and the bending of the main rachis.
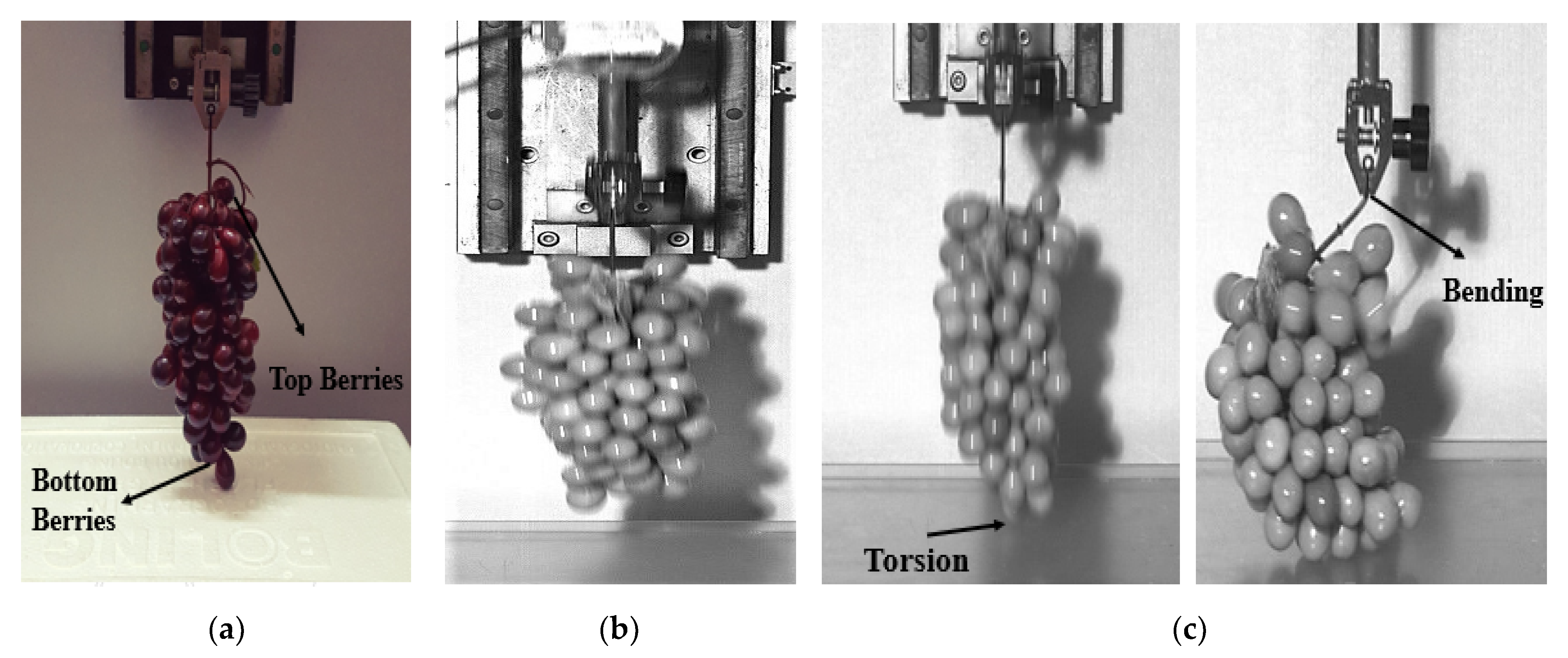
3.1.2. Different Excitation Transmissions during Placing
- 1.
- Bottom Berries
- 2.
- Top Berries
3.2. Effect of Different Factors on Vibration Signals
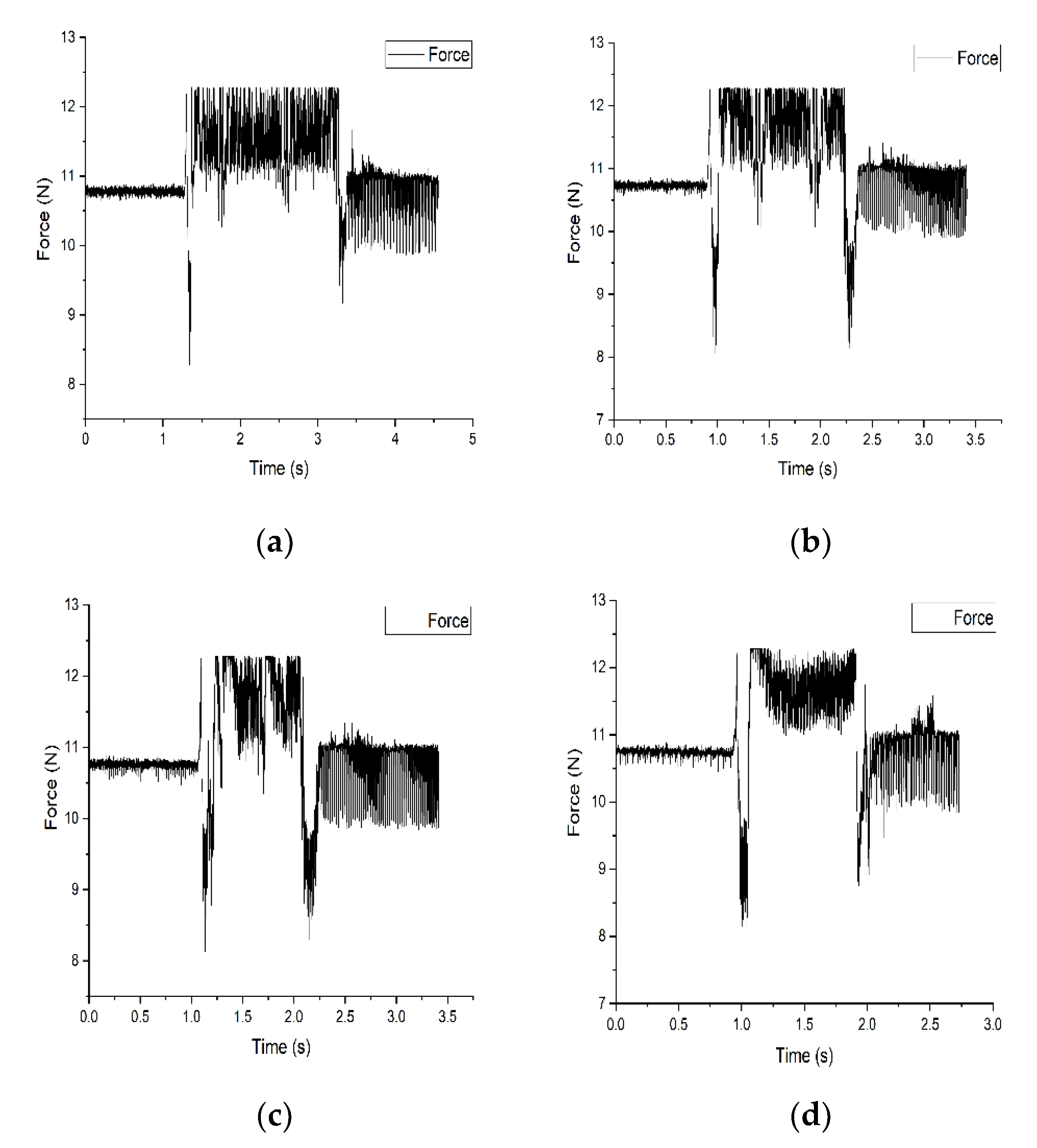
3.2.1. Effect of Different Speeds during Vertical Transportation
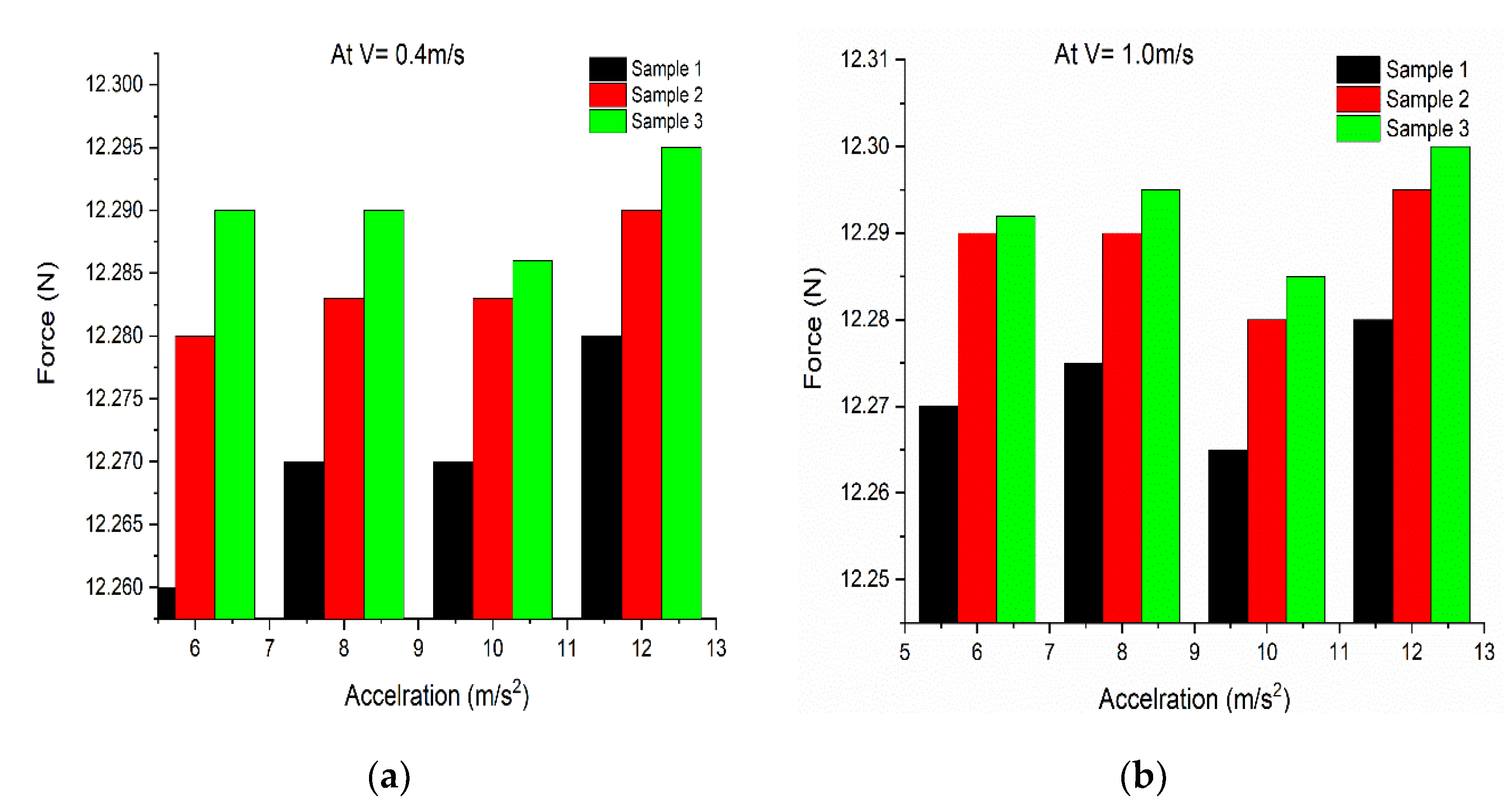
3.2.2. Effect of Acceleration Excitations during Vertical Transportation
3.2.3. Effect of Packaging Materials on the Berry Deflection of Cluster
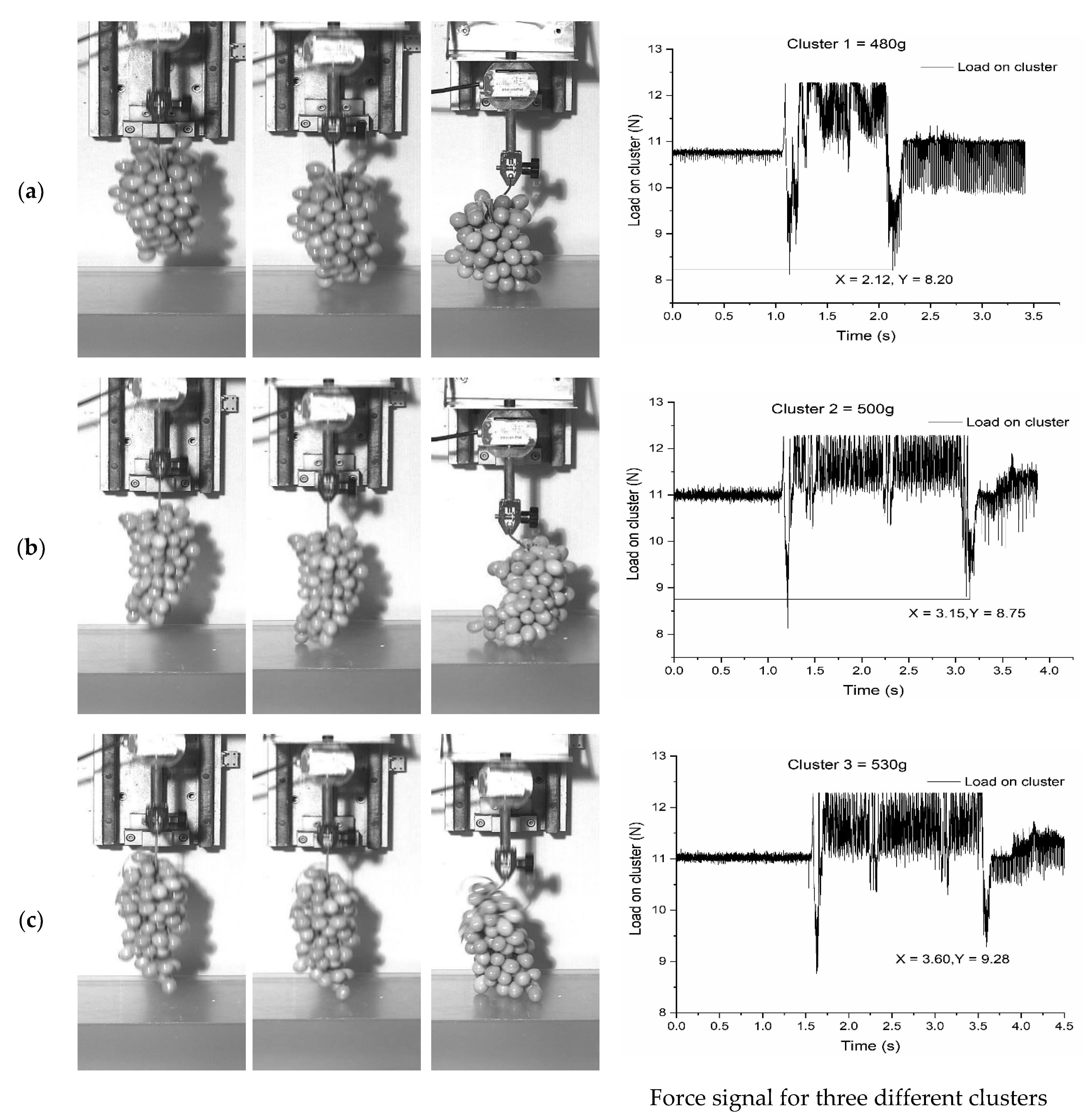
3.2.4. Effect of the Cluster’s Mass on Berry Deflection during Placing
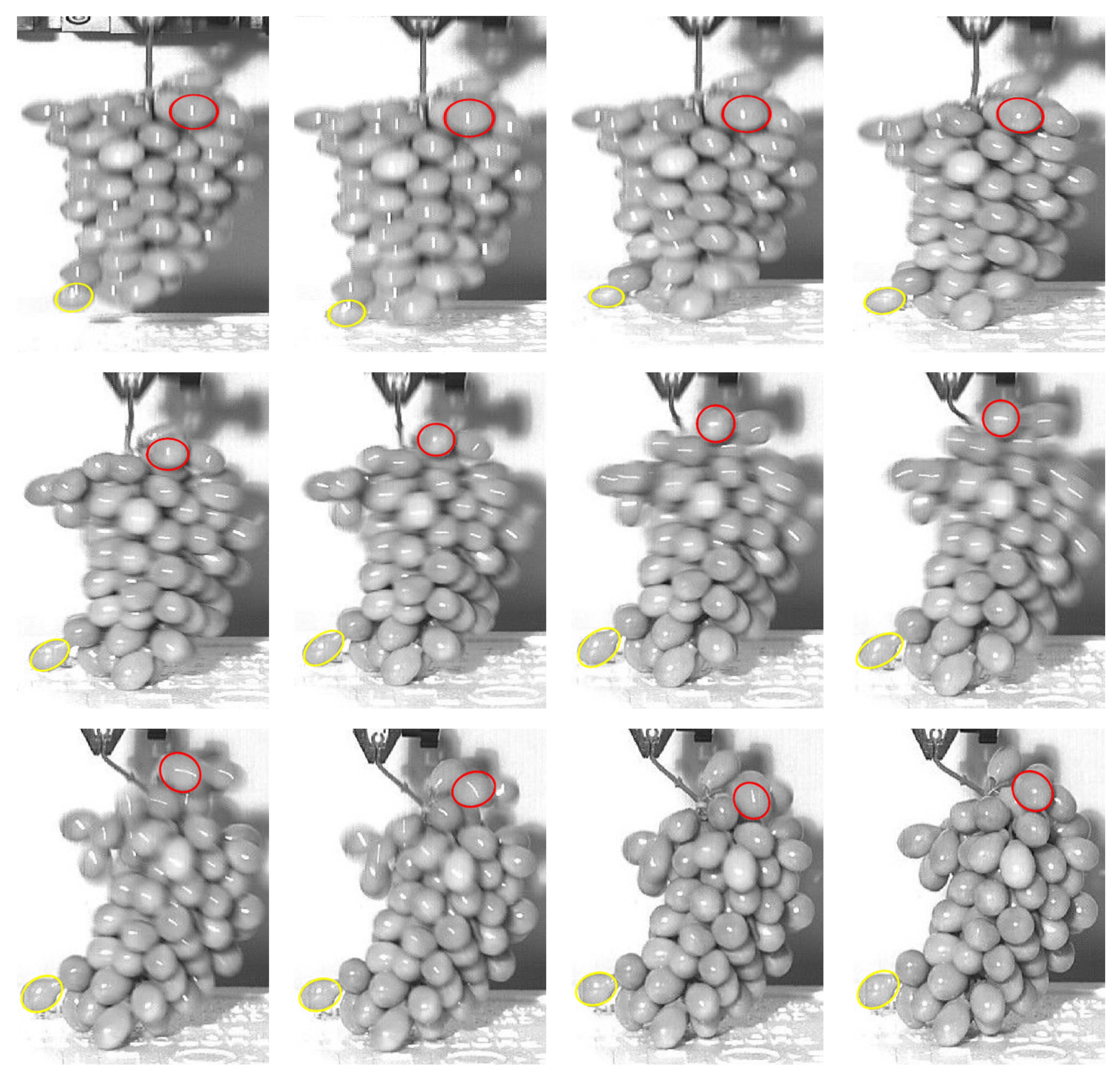
3.2.5. Behavior of Top and Bottom Berries during Placing
3.2.6. Relationship between the Cluster’s Force before and after Impact
4. Conclusions
- It is concluded that the accelerating phase of the actuator causes high vibrations of the cluster during vertical transportation, and its magnitude increases with an increase in speed, so the hanging force signals also increase. The results of the peak force signals of the grape cluster during vertical transportation at different speeds (0.4, 1.0 m/s) suggest that the optimum acceleration excitation is 10 m/s2, at which berry deflection is observed to be at a minimum.
- It is concluded that with an increase in speed and acceleration excitation, the magnitude of force signals after colliding decreases due to the excitations coming from the packaging surface, which causes more berry deflection to occur.
- It is concluded from the force sensor signals that rigid plastic boxes deflect the whole cluster most compared to expandable polystyrene and corrugated fiberboard boxes.
- The behavior of the upper and lower berries was observed from the high-speed photography images during the placing of the whole cluster, and it is concluded that the deflection of the upper berries is due to the excitations coming from bending of the main rachis, and the deflection of lower berries is due to the torsional load on the junction between the pedicel and the berry.
- It is observed from the vibration signals that with the increment in the mass of the cluster, the deflection of the berries decreases during placing.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- FAO. FAOSTAT—Food and Agriculture Organization of the United Nations (FAO). Selection Criteria Grapes, All Countries, Prod. Quant. 2018. Available online: http//www.fao.org/faostat/en/#data/QC2020 (accessed on 5 June 2021).
- Jung, H.M.; Lee, S.; Lee, W.-H.; Cho, B.-K.; Lee, S.H. Effect of vibration stress on quality of packaged grapes during transportation. Eng. Agric. Environ. Food 2018, 11, 79–83. [Google Scholar] [CrossRef]
- Rizzuti, A.; Aguilera-Sáez, L.M.; Gallo, V.; Cafagna, I.; Mastrorilli, P.; Latronico, M.; Pacifico, A.; Matarrese, A.M.S.; Ferrara, G. On the use of ethephon as abscising agent in cv. Crimson seedless table grape production: Combination of fruit detachment force, fruit drop and metabolomics. Food Chem. 2015, 171, 341–350. [Google Scholar] [CrossRef]
- Deng, Y.; Wu, Y.; Li, Y.; Zhang, P.; Yang, M.; Shi, C.; Zheng, C.; Yu, S. A mathematical model for predicting grape berry drop during storage. J. Food Eng. 2007, 78, 500–511. [Google Scholar] [CrossRef]
- Luo, L.; Tang, Y.; Zou, X.; Wang, C.; Zhang, P.; Feng, W. Robust grape cluster detection in a vineyard by combining the AdaBoost framework and multiple color components. Sensors 2016, 16, 2098. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Peng, Y.; Faheem, M. Experimental and theoretical analysis of fruit plucking patterns for robotic tomato harvesting. Comput. Electron. Agric. 2020, 173, 105330. [Google Scholar] [CrossRef]
- Hussein, Z.; Fawole, O.; Opara, U.L. Harvest and postharvest factors affecting bruise damage of fresh fruits. Hortic. Plant J. 2020, 6, 1–13. [Google Scholar] [CrossRef]
- Liu, J.; Yuan, Y.; Gao, Y.; Tang, S.; Li, Z. Virtual model of grip-and-cut picking for simulation of vibration and falling of grape clusters. Trans. ASABE 2019, 62, 603–614. [Google Scholar] [CrossRef]
- Lichter, A.; Gabler, F.M.; Smilanick, J.L. Control of spoilage in table grapes. Stewart Postharvest Rev. 2006, 6, 1–10. [Google Scholar]
- Chen, R.; Wu, P.; Cao, D.; Tian, H.; Chen, C.; Zhu, B. Edible coatings inhibit the postharvest berry abscission of table grapes caused by sulfur dioxide during storage. Postharvest Biol. Technol. 2019, 152, 1–8. [Google Scholar] [CrossRef]
- Hussein, Z.; Fawole, O.; Opara, U.L. Preharvest factors influencing bruise damage of fresh fruits—A review. Sci. Hortic. 2018, 229, 45–58. [Google Scholar] [CrossRef]
- Hu, X.; Xu, Y.; Liu, J. Design of vibration monitoring system and its application in grape fatigue damage research. In Proceedings of the 2nd International Conference on Control and Computer Vision, Jeju Island, Korea, 15–18 June 2019; pp. 141–149. [Google Scholar]
- Jobbagy, J.; Kristof, K.; Schmidt, A.; Krizan, M.; Urbanovicova, O. Evaluation of the mechanized harvest of grapes with regards to harvest losses and economical aspects. Agron. Res. 2018, 16, 426–442. [Google Scholar]
- Costa, W.V.D.; Elorza, P.B.; Garrido-Izard, M. Impact of local conditions and machine management on grape harvest quality. Sci. Agric. 2019, 76, 353–361. [Google Scholar] [CrossRef] [Green Version]
- Fernando, I.; Fei, J.; Stanley, R.; Enshaei, H. Measurement and evaluation of the effect of vibration on fruits in transit-review. Packag. Technol. Sci. 2018, 31, 723–738. [Google Scholar] [CrossRef]
- Gross, K.C.; Wang, C.Y.; Saltveit, M.E. Agriculture Handbook Number 66: The Commercial Storage of Fruits, Vegetables, and Florist and Nursery Stocks, 5th ed.; United States Department of Agriculture, Agriculture Research Service: Washington, DC, USA, 2016.
- Mingjuan, L.; Xiangrong, Y.; Rende, W.; Yayuan, Z.; Jian, S.; Zhichun, L.; Changbao, L. Study on fruit quality and physiology and biochemistry of grapes during cold storage. South J. Agric. Sci. 2013, 44, 1883–1889. [Google Scholar]
- Nicolosi, E.; Ferlito, F.; Amenta, M.; Russo, T.; Rapisarda, P. Changes in the quality and antioxidant components of minimally processed table grapes during storage. Sci. Hortic. 2018, 232, 175–183. [Google Scholar] [CrossRef]
- Komarnicki, P.; Stopa, R.; Kuta, Ł.; Szyjewicz, D. Determination of apple bruise resistance based on the surface pressure and contact area measurements under impact loads. Comput. Electron. Agric. 2017, 142, 155–164. [Google Scholar] [CrossRef]
- Stropek, Z.; Gołacki, K. Bruise susceptibility and energy dissipation analysis in pears under impact loading conditions. Postharvest Biol. Technol. 2020, 163, 111120. [Google Scholar] [CrossRef]
- Hu, G.; Chen, J. Transverse anisotropy mechanical properties and drop test of apple. In Proceedings of the 2020 ASABE Annual International Virtual Meeting, Omaha, NE, USA, 13–15 July 2020; p. 1. [Google Scholar]
- Yousefi, S.; Farsi, H.; Kheiralipour, K. Drop test of pear fruit: Experimental measurement and finite element modelling. Biosyst. Eng. 2016, 147, 17–25. [Google Scholar] [CrossRef]
- Shafie, M.M.; Rajabipour, A.; Mobli, H. Determination of bruise incidence of pomegranate fruit under drop case. Int. J. Fruit Sci. 2017, 17, 296–309. [Google Scholar] [CrossRef]
- Opara, L.U.; Al-Ghafri, A.; Agzoun, H.; Al-Issai, J.; Al-Jabri, F.; Opara, U.L. Design and development of a new device for measuring susceptibility to impact damage of fresh produce. N. Z. J. Crop. Hortic. Sci. 2007, 35, 245–251. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, S.; Fu, H.; Lu, H.; Yang, Z. Evaluation of litchi impact damage degree and damage susceptibility. Comput. Electron. Agric. 2020, 173, 105409. [Google Scholar] [CrossRef]
- Van Zeebroeck, M.; Tijskens, E.; Liedekerke, P.; Deli, V.; Baerdemaeker, J.; Ramon, H. Determination of the dynamical behaviour of biological materials during impact using a pendulum device. J. Sound Vib. 2003, 266, 465–480. [Google Scholar] [CrossRef]
- Stropek, Z.; Gołacki, K. Impact characteristics of pears. Postharvest Biol. Technol. 2019, 147, 100–106. [Google Scholar] [CrossRef]
- Öztekin, Y.B.; Güngör, B. Determining impact bruising thresholds of peaches using electronic fruit. Sci. Hortic. 2019, 262, 109046. [Google Scholar] [CrossRef]
- Praeger, U.; Surdilovic, J.; Truppel, I.; Herold, B.; Geyer, M. Comparison of electronic fruits for impact detection on a laboratory scale. Sensors 2013, 13, 7140–7155. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Surdilovic, J.; Praeger, U.; Herold, B.; Truppel, I.; Geyer, M. Impact characterization of agricultural products by fall trajectory simulation and measurement. Comput. Electron. Agric. 2018, 151, 460–468. [Google Scholar] [CrossRef]
- Stropek, Z.; Gołacki, K. Quantity assessment of plastic deformation energy under impact loading conditions of selected apple cultivars. Postharvest Biol. Technol. 2016, 115, 9–17. [Google Scholar] [CrossRef]
- Horabik, J.; Beczek, M.; Mazur, R.; Parafiniuk, P.; Ryżak, M.; Molenda, M. Determination of the restitution coefficient of seeds and coefficients of visco-elastic Hertz contact models for DEM simulations. Biosyst. Eng. 2017, 161, 106–119. [Google Scholar] [CrossRef]
- Liang, N.; Ni, F.; Zhang, K.; Tang, Y.; Hu, Y. Optimized installation angle and distance of a grading channel for dried jujube fruit with a push-pull actuating mechanism. Comput. Electron. Agric. 2018, 150, 134–142. [Google Scholar] [CrossRef]
- Jinwu, W.; Han, T.; Jinfeng, W.; Dongxuan, J.; Xin, L. Measurement and analysis of restitution coefficient between maize seed and soil based on high-speed photography. Int. J. Agric. Biol. Eng. 2017, 10, 102–114. [Google Scholar]
- Xia, M.; Zhao, X.; Wei, X.; Guan, W.; Wei, X.; Xu, C.; Mao, L. Impact of packaging materials on bruise damage in kiwifruit during free drop test. Acta Physiol. Plant. 2020, 42, 1–11. [Google Scholar] [CrossRef]
- Zhou, J.; He, L.; Karkee, M.; Zhang, Q. Effect of catching surface and tilt angle on bruise damage of sweet cherry due to mechanical impact. Comput. Electron. Agric. 2016, 121, 282–289. [Google Scholar] [CrossRef] [Green Version]
- Du, D.; Wang, B.; Wang, J.; Yao, F.; Hong, X. Prediction of bruise susceptibility of harvested kiwifruit (Actinidia chinensis) using finite element method. Postharvest Biol. Technol. 2019, 152, 36–44. [Google Scholar] [CrossRef]
- Fu, H.; He, L.; Ma, S.; Karkee, M.; Chen, D.; Zhang, Q.; Wang, S. ’Jazz’ apple impact bruise responses to different cushioning materials. Trans. ASABE 2017, 60, 327–336. [Google Scholar] [CrossRef]
- Deng, W.; Wang, C.; Xie, S. Impact peak force measurement of potato. Int. J. Food Prop. 2020, 23, 616–626. [Google Scholar] [CrossRef] [Green Version]
- Hussein, Z.; Fawole, O.A.; Opara, U.L. Bruise damage susceptibility of pomegranates (Punica granatum, L.) and impact on fruit physiological response during short term storage. Sci. Hortic. 2019, 246, 664–674. [Google Scholar] [CrossRef]
- Vinokur, Y.; Rodov, V.; Levi, A.; Kaplunov, T.; Zutahy, Y.; Lichter, A. A method for evaluating fruit abscission potential of grapes and cherry tomato clusters. Postharvest Biol. Technol. 2013, 79, 20–23. [Google Scholar] [CrossRef]
- Mohsenin, N.N. Physical Properties of Plant and Animal Materials; Routledge: Abingdon, UK, 1986. [Google Scholar]
- Kupferman, E. Minimizing Bruising in Apples; Postharvest Information Network, Washington State University, Tree Fruit Research and Extension Center: Wenatchee, WA, USA, 2006. [Google Scholar]
- Fahe, C.; Xin, Y.; Weiyi, Z. Study on relationship between pedicel structure and berry abscission of ‘Xinjiang wuhebai’ grape cultivars. J. Xinjiang Agric. Univ. 2000, 1, 44–48. [Google Scholar]
- Youmei, W.; Xuezeng, H.; Yu, L.; Jianchuan, R. Postharvest berry abscission and storage of grape fruit. Acta Phytophysiol. Sin. 1992, 18, 267–272. [Google Scholar]
- Zahedipour, P.; Asghari, M.; Abdollahi, B.; Alizadeh, M.; Danesh, Y.R. A comparative study on quality attributes and physiological responses of organic and conventionally grown table grapes during cold storage. Sci. Hortic. 2019, 247, 86–95. [Google Scholar] [CrossRef]
- Zhang, Z.; Xu, J.; Chen, Y.; Wei, J.; Wu, B. Nitric oxide treatment maintains postharvest quality of table grapes by mitigation of oxidative damage. Postharvest Biol. Technol. 2019, 152, 9–18. [Google Scholar] [CrossRef]
- Vázquez-Hernández, M.; Navarro, S.; Sanchez-Ballesta, M.T.; Merodio, C.; Escribano, M.I. Short-term high CO2 treatment reduces water loss and decay by modulating defense proteins and organic osmolytes in Cardinal table grape after cold storage and shelf-life. Sci. Hortic. 2018, 234, 27–35. [Google Scholar] [CrossRef]
- Liguori, G.; Sortino, G.; Gullo, G.; Inglese, P. Effects of modified atmosphere packaging and chitosan treatment on quality and sensorial parameters of minimally processed cv. ‘Italia’ table grapes. Agronomy 2021, 11, 328. [Google Scholar] [CrossRef]
- Pezzi, F.; Caprara, C.; Bordini, F. Transmission of impacts during mechanical grape harvesting and transportation. J. Agric. Eng. 2008, 39, 43–48. [Google Scholar] [CrossRef] [Green Version]
- Caprara, C.; Pezzi, F. Measuring the stresses transmitted during mechanical grape harvesting. Biosyst. Eng. 2011, 110, 97–105. [Google Scholar] [CrossRef]
- Yue, X.; Wu, P.; Wang, S.; Liu, Y.; Su, H. Experimental analysis of drop and vibration damage during grape storage and transportation. Packag. Eng. 2019, 40, 9–18. [Google Scholar]
- Bian, H.; Tu, P. The influence of drop height on the dielectric properties of Red Globe grapes. Food Ferment. Ind. 2013, 39, 154–157. [Google Scholar]
- Vallone, M.; Alleri, M.; Bono, F.; Catania, P. Acceleration assessment during mechanical harvest of grapes using a non commercial instrumented sphere. Chem. Eng. Trans. 2017, 58, 277–282. [Google Scholar]
- Fischer, D.F.; Craig, W.L.; Ashby, B.H. Reducing transportation damage to grapes and strawberries. J. Food Distrib. Res. 1990, 21, 193–202. [Google Scholar]
- Fischer, D.; Craig, W.L.; Watada, A.E.; Douglas, W.; Ashby, B.H. Simulated in-transit vibration damage to packaged fresh market grapes and strawberries. Appl. Eng. Agric. 1992, 8, 363–366. [Google Scholar] [CrossRef] [Green Version]
- Lixin, L. Dynamic mechanical model of fruit under drop impact. Eng. Mech. 2009, 4, 228–233. [Google Scholar]
- Hao, D. Research on the Key Factors Affecting the Quality of Kyoho Grapes during Storage and Transportation. Master’s Thesis, Tianjin University of Commerce, Tianjin, China, 2016. [Google Scholar]
- Demir, F.; Kara, Z.; Carman, K. Table grapes transport simulation study by Bardas (Vitis vinifera L.) cultivar grown in Karaman Turkey. In Proceedings of the 2nd International Symposium on Sustainable Development, Sarajevo, Bosnia and Herzegovina, 8 June 2010; pp. 456–463. [Google Scholar]
- Kondo, N.; Tanihara, K.; Shiigi, T.; Shimizu, H.; Kurita, M.; Tsutsumi, M.; Chong, V.K.; Taniwaki, S. Path planning of tomato cluster harvesting robot for realizing low vibration and speedy transportation. Eng. Agric. Environ. Food 2009, 2, 108–115. [Google Scholar] [CrossRef]
- Liu, J.; Tang, S.; Shan, S.; Ju, J. Simulation and test of grape fruit cluster vibration for robotic harvesting. Trans. Chin. Soc. Agric. Mach. 2016, 47, 1–8. [Google Scholar]
- Faheem, M.; Liu, J.; Chang, G.; Ahmad, I.; Peng, Y. Hanging force analysis for realizing low vibration of grape clusters during speedy robotic post-harvest handling. Int. J. Agric. Biol. Eng. 2021, 14, 62–71. [Google Scholar] [CrossRef]
- Peacock, B.; Simpson, T. The Relationship between Berry Weight, Length and Width for Five Table Grape Varieties; University of California Cooperative Extension (UCCE): Tulare County, CA, USA, 2017; Publ. TB1-95. [Google Scholar]
- Mack, J.; Rist, F.; Herzog, K.; Töpfer, R.; Steinhage, V. Constraint-based automated reconstruction of grape bunches from 3D range data for high-throughput phenotyping. Biosyst. Eng. 2020, 197, 285–305. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, Y.; Wang, Q.; Dong, K.; Yang, S.; Jiang, Y.; Zheng, J.; Li, B.; Huo, Y.; Wang, X.; et al. Dynamics of droplet formation with oscillation of meniscus in electric periodic dripping regime. Exp. Therm. Fluid Sci. 2021, 120, 110250. [Google Scholar] [CrossRef]
- Rekhviashvili, S.; Pskhu, A.; Agarwal, P.; Jain, S. Application of the fractional oscillator model to describe damped vibrations. Turk. J. Phys. 2019, 43, 236–242. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Speed (m/s) | Accelerated Speed (m/s2) | Accelerated Time (ms) | Duty Cycle (s) |
|---|---|---|---|
| 0.4 | 6 | 66.66 | 2 |
| 8 | 50 | 2 | |
| 10 | 40 | 2 | |
| 12 | 33 | 2 | |
| 0.6 | 6 | 100 | 1.33 |
| 8 | 75 | 1.33 | |
| 10 | 60 | 1.33 | |
| 12 | 50 | 1.33 | |
| 0.8 | 6 | 133 | 1 |
| 8 | 100 | 1 | |
| 10 | 80 | 1 | |
| 12 | 66 | 1 | |
| 1 | 6 | 166 | 0.8 |
| 8 | 125 | 0.8 | |
| 10 | 100 | 0.8 | |
| 12 | 83 | 0.8 |
| Speed (m/s) | Hang Force (Sample 1) (N) | Hang Force (Sample 2) (N) | Hang Force (Sample 3) (N) | Impact with Corrugated Box (N) | Impact with Expandable Polystyrene Box (N) | Impact with Rigid Plastic Box (N) |
|---|---|---|---|---|---|---|
| 0.4 | 12.2 | 12.3 | 12.41 | 9.6 | 9.3 | 8.5 |
| 0.6 | 12.25 | 12.35 | 12.49 | 9.5 | 9.25 | 8.4 |
| 0.8 | 12.28 | 12.4 | 12.56 | 9.41 | 9.12 | 8.3 |
| 1.0 | 12.4 | 12.42 | 12.6 | 9.28 | 9.05 | 8.2 |
| R2 | 0.92 | 0.97 | 0.98 | 0.99 | 0.97 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Faheem, M.; Liu, J.; Chang, G.; Abbas, I.; Xie, B.; Shan, Z.; Yang, K. Experimental Research on Grape Cluster Vibration Signals during Transportation and Placing for Harvest and Post-Harvest Handling. Agriculture 2021, 11, 902. https://doi.org/10.3390/agriculture11090902
Faheem M, Liu J, Chang G, Abbas I, Xie B, Shan Z, Yang K. Experimental Research on Grape Cluster Vibration Signals during Transportation and Placing for Harvest and Post-Harvest Handling. Agriculture. 2021; 11(9):902. https://doi.org/10.3390/agriculture11090902
Chicago/Turabian StyleFaheem, Muhammad, Jizhan Liu, Guozheng Chang, Irfan Abbas, Binbin Xie, Zhu Shan, and Kaiyu Yang. 2021. "Experimental Research on Grape Cluster Vibration Signals during Transportation and Placing for Harvest and Post-Harvest Handling" Agriculture 11, no. 9: 902. https://doi.org/10.3390/agriculture11090902