
Creep Modelling of Rootstock during Holding in Watermelon Grafting


Abstract
:1. Introduction
2. Materials and Methods
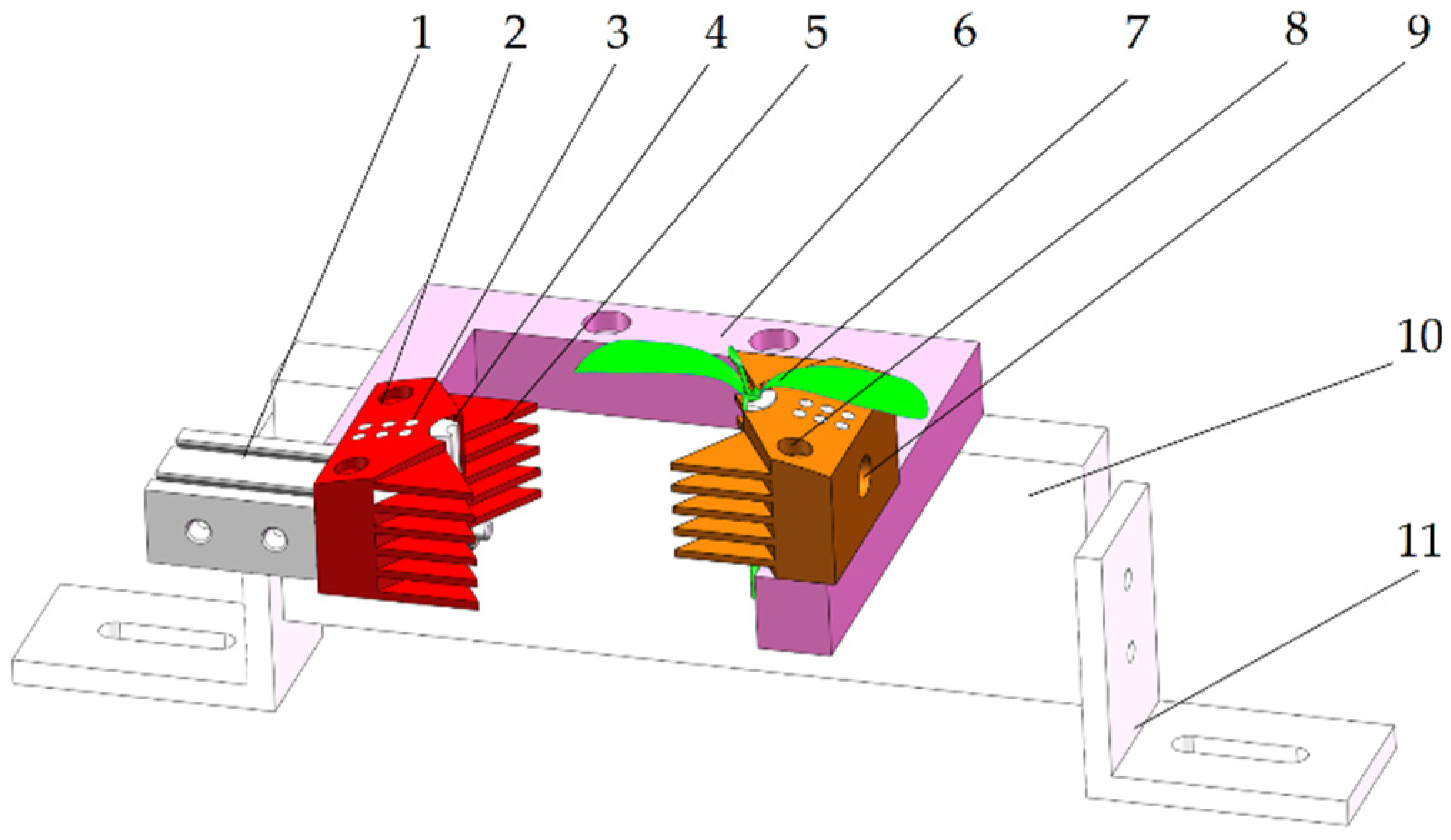
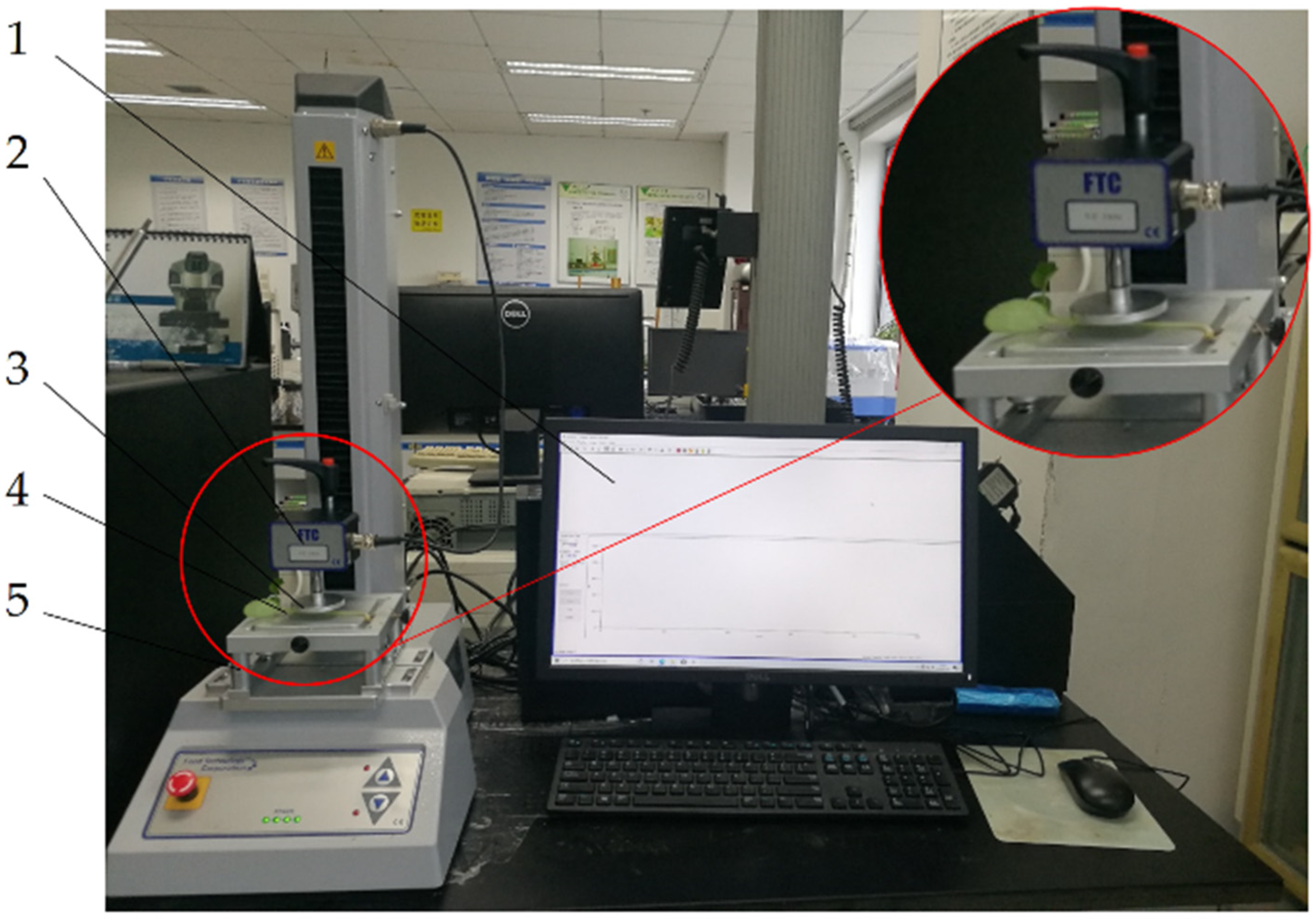
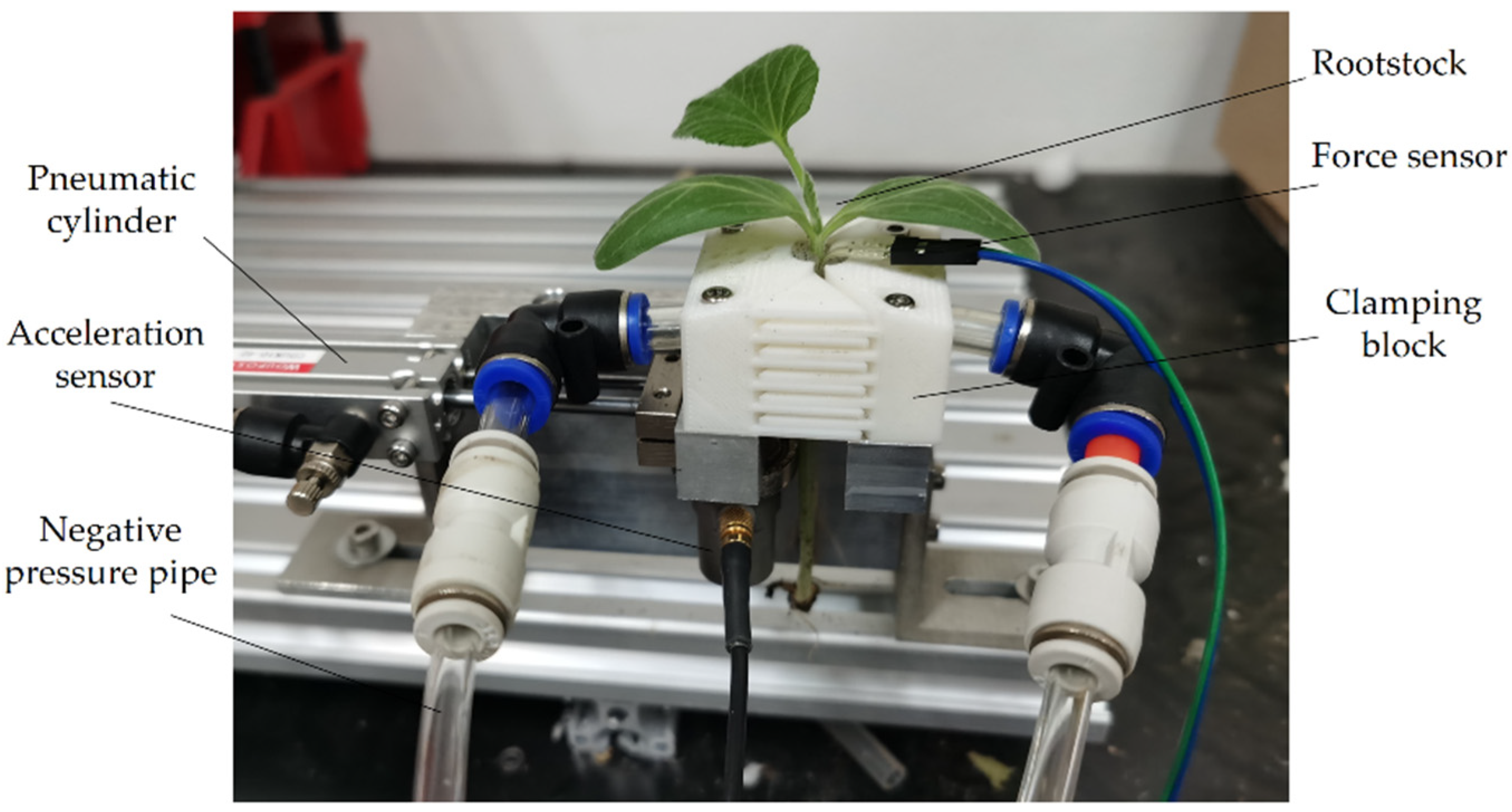
2.1. Rootstock Clamping Mechanism
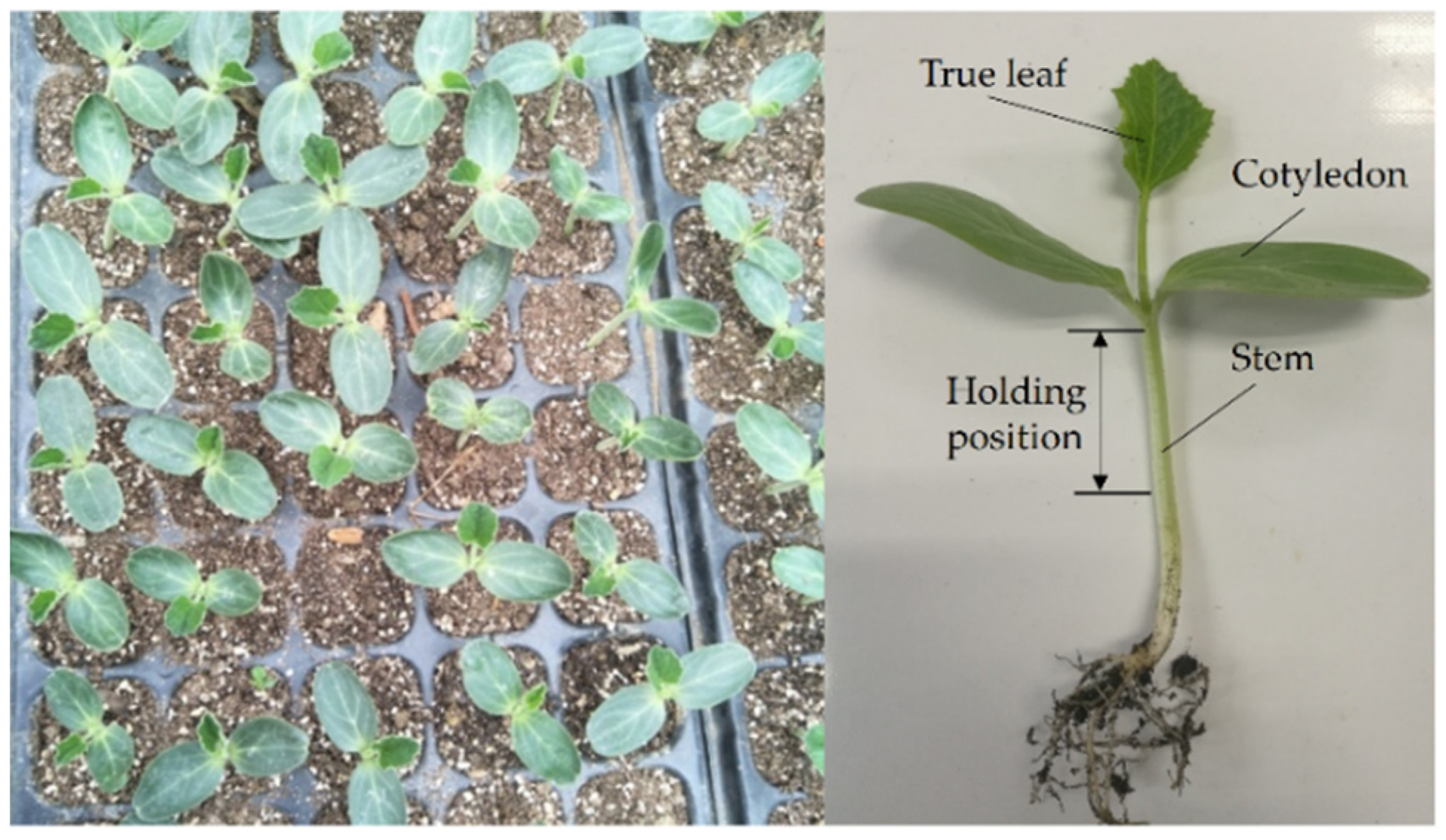
2.2. Test Materials
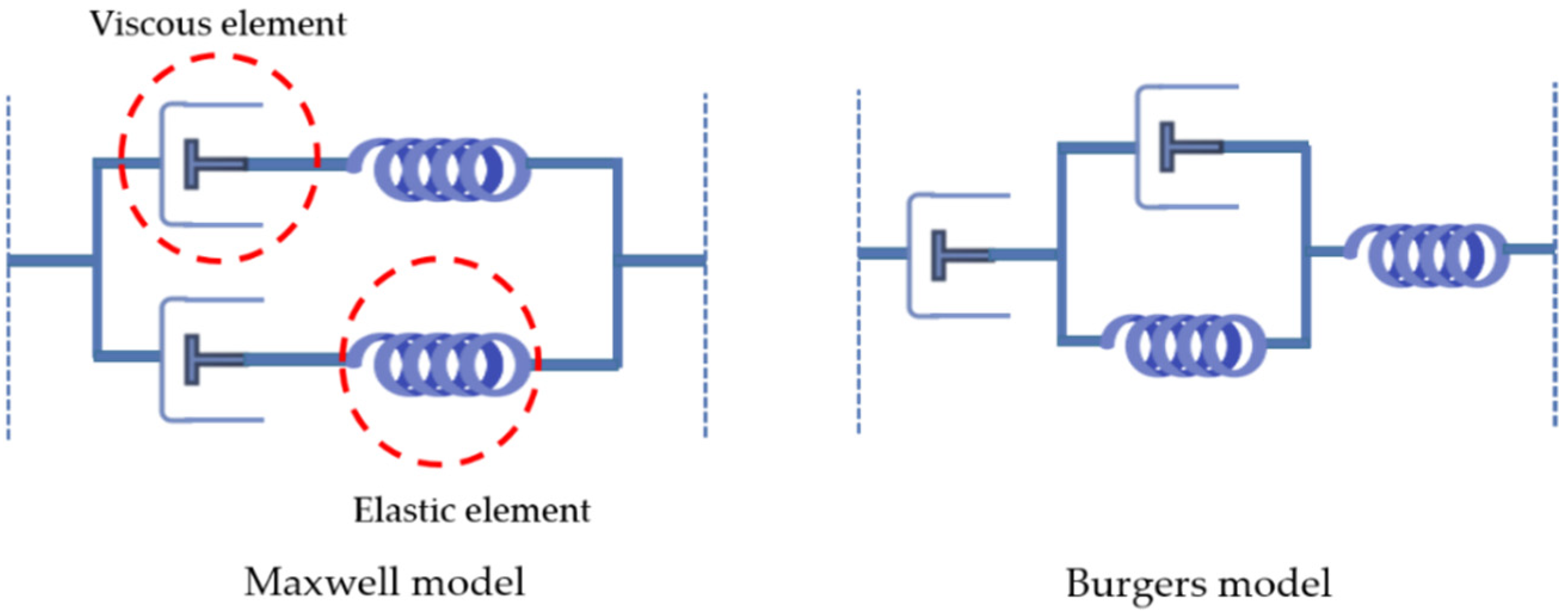
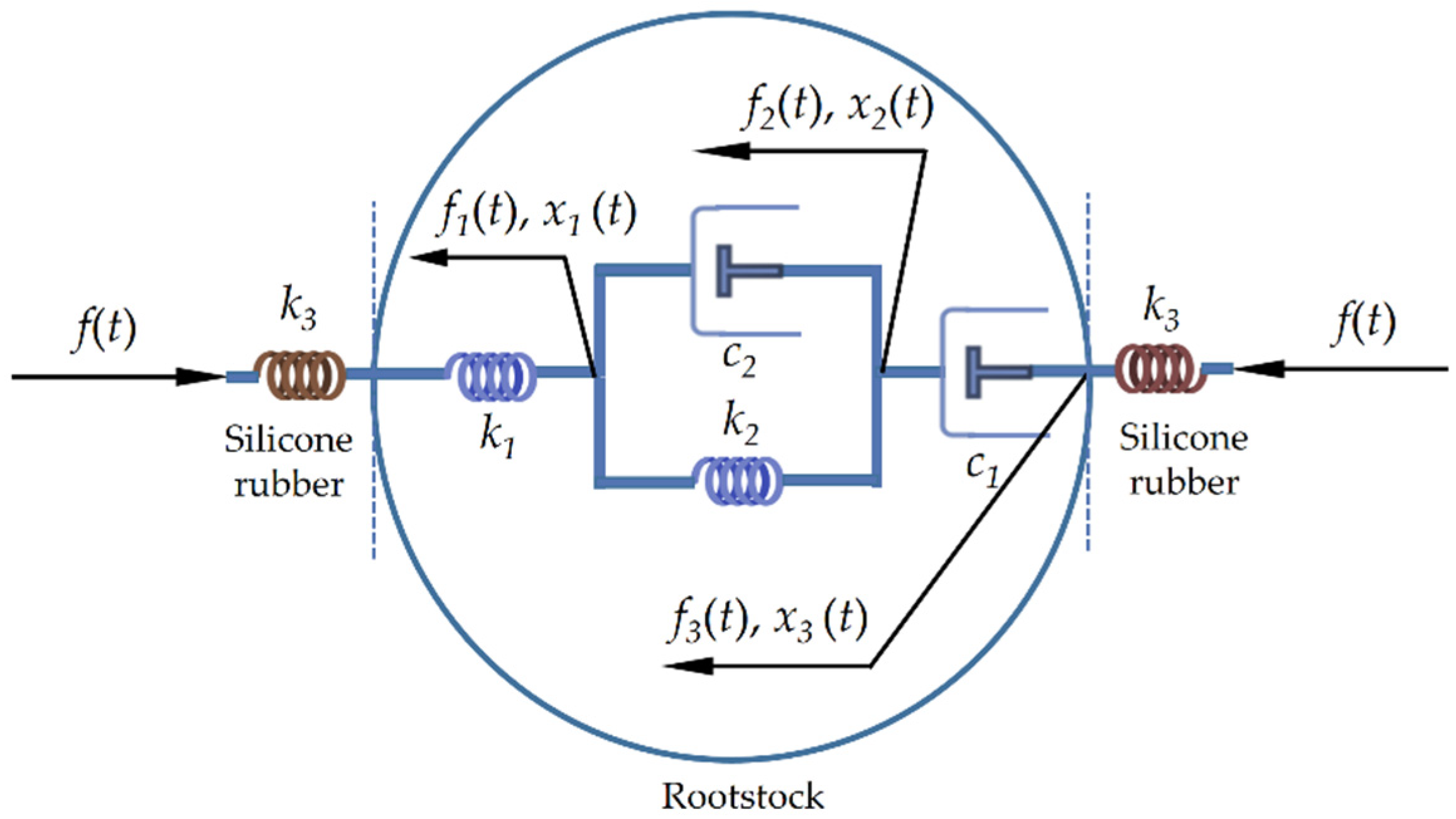
2.3. Establishment of a Creep Model
2.4. Test Methods
2.5. Test Design and Data Analysis
3. Results and Discussion
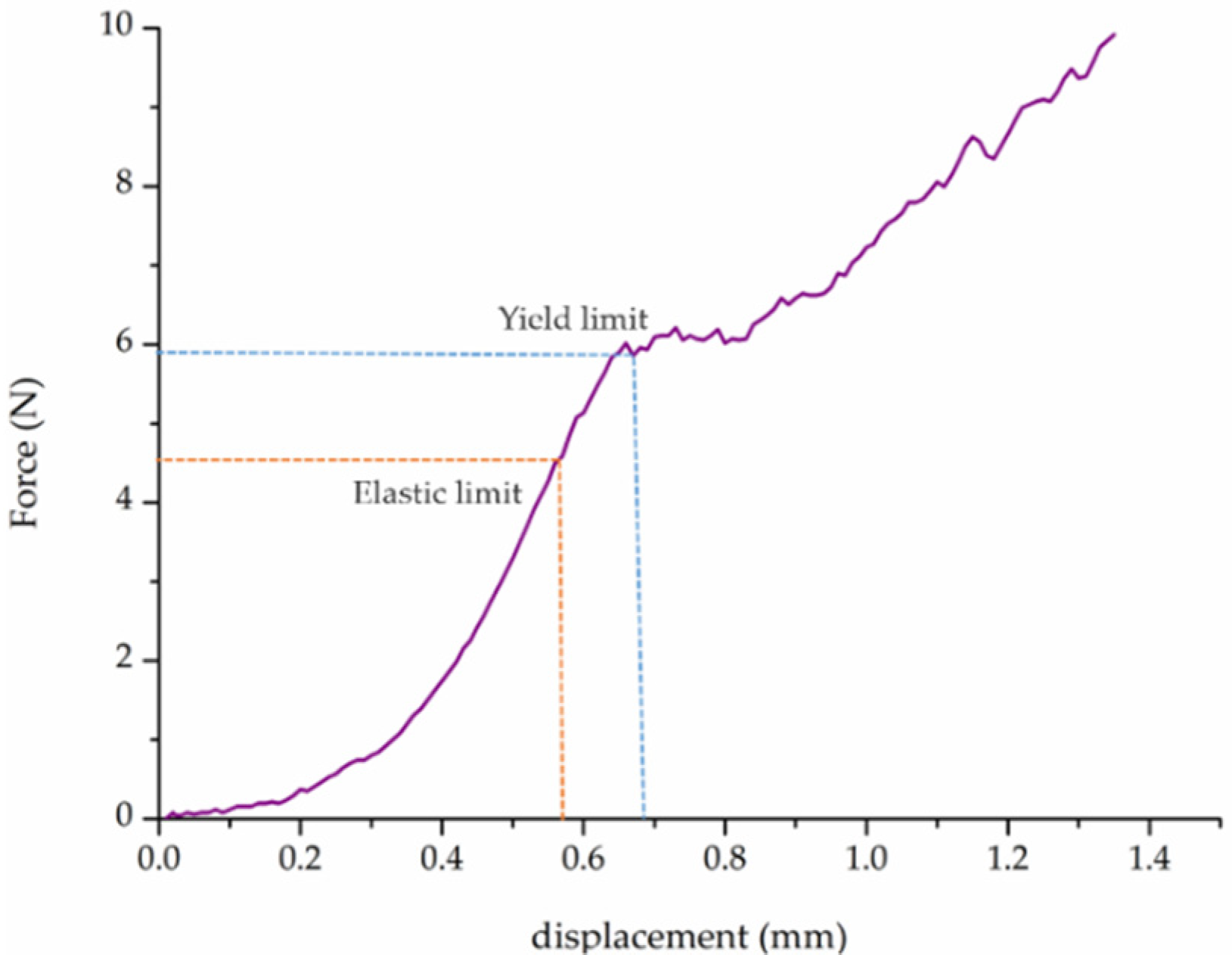
3.1. Compression Test
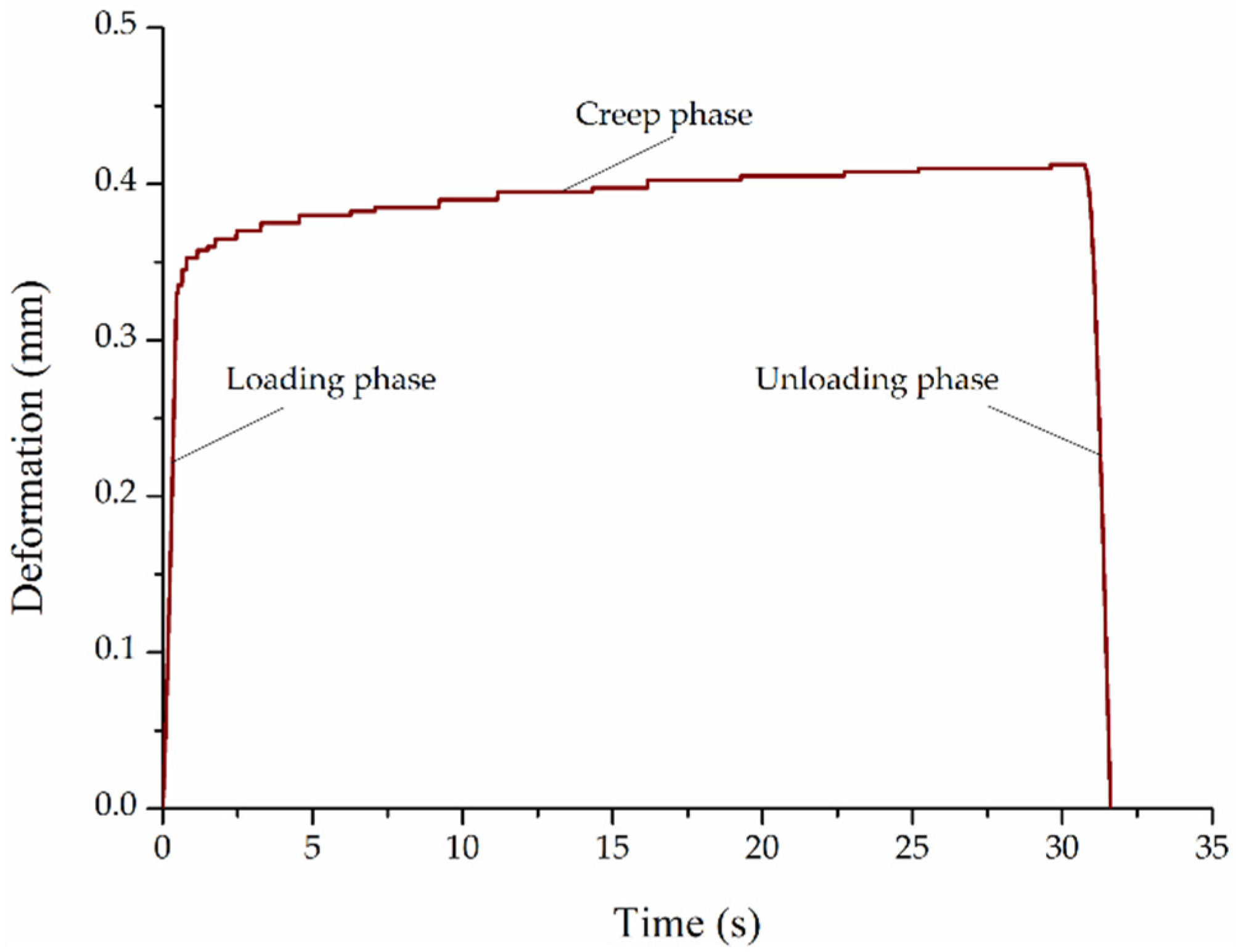
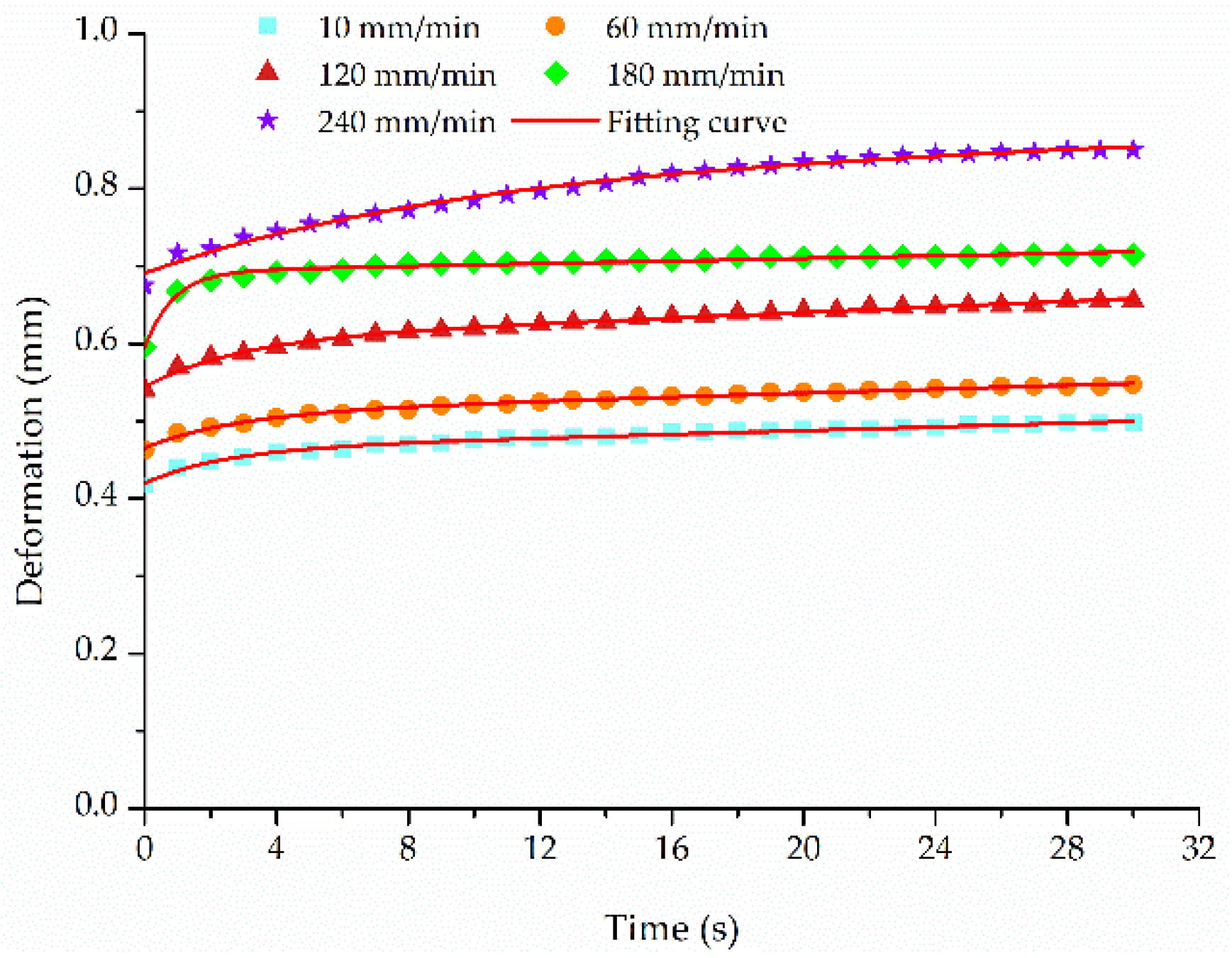
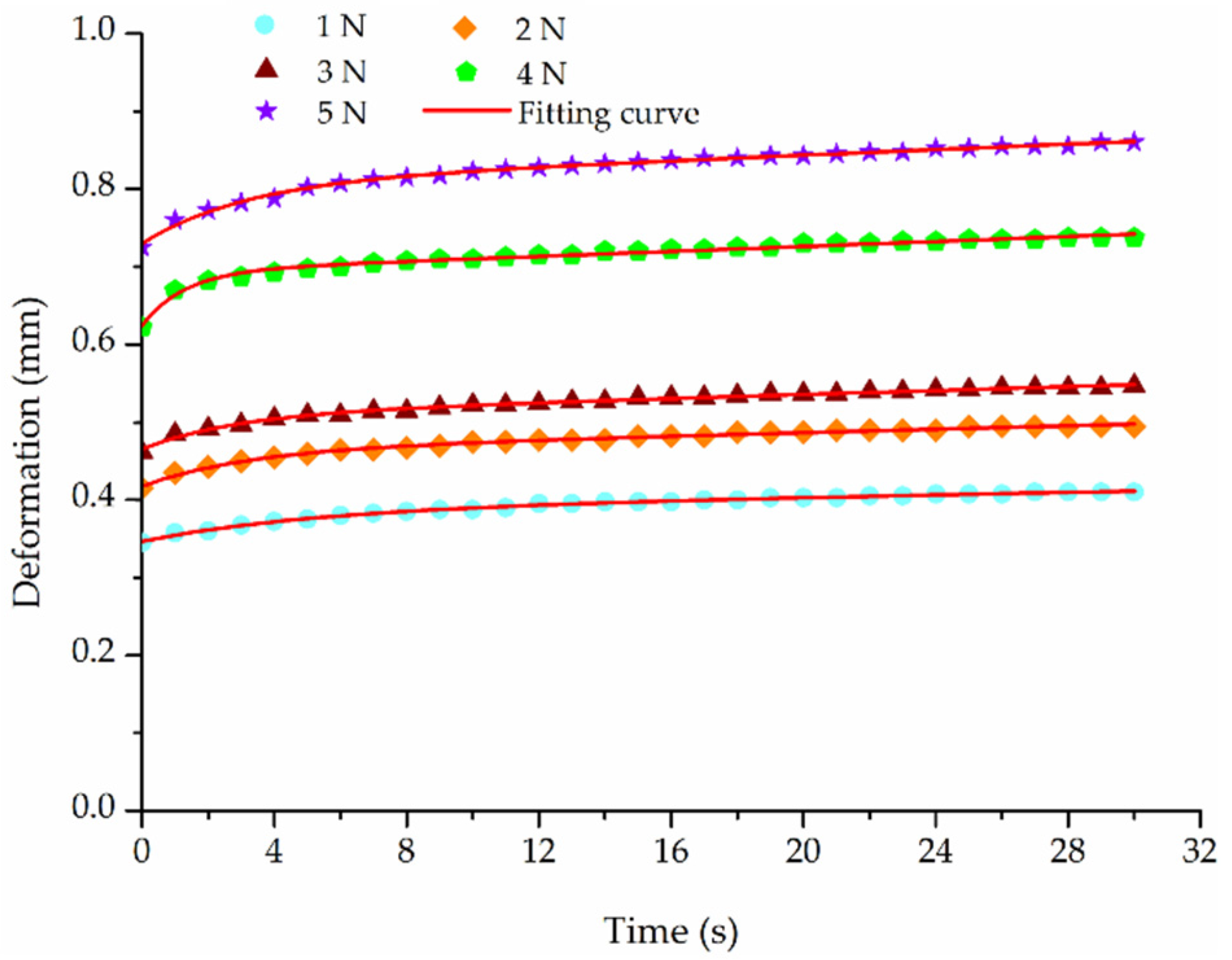
3.2. Creep Test
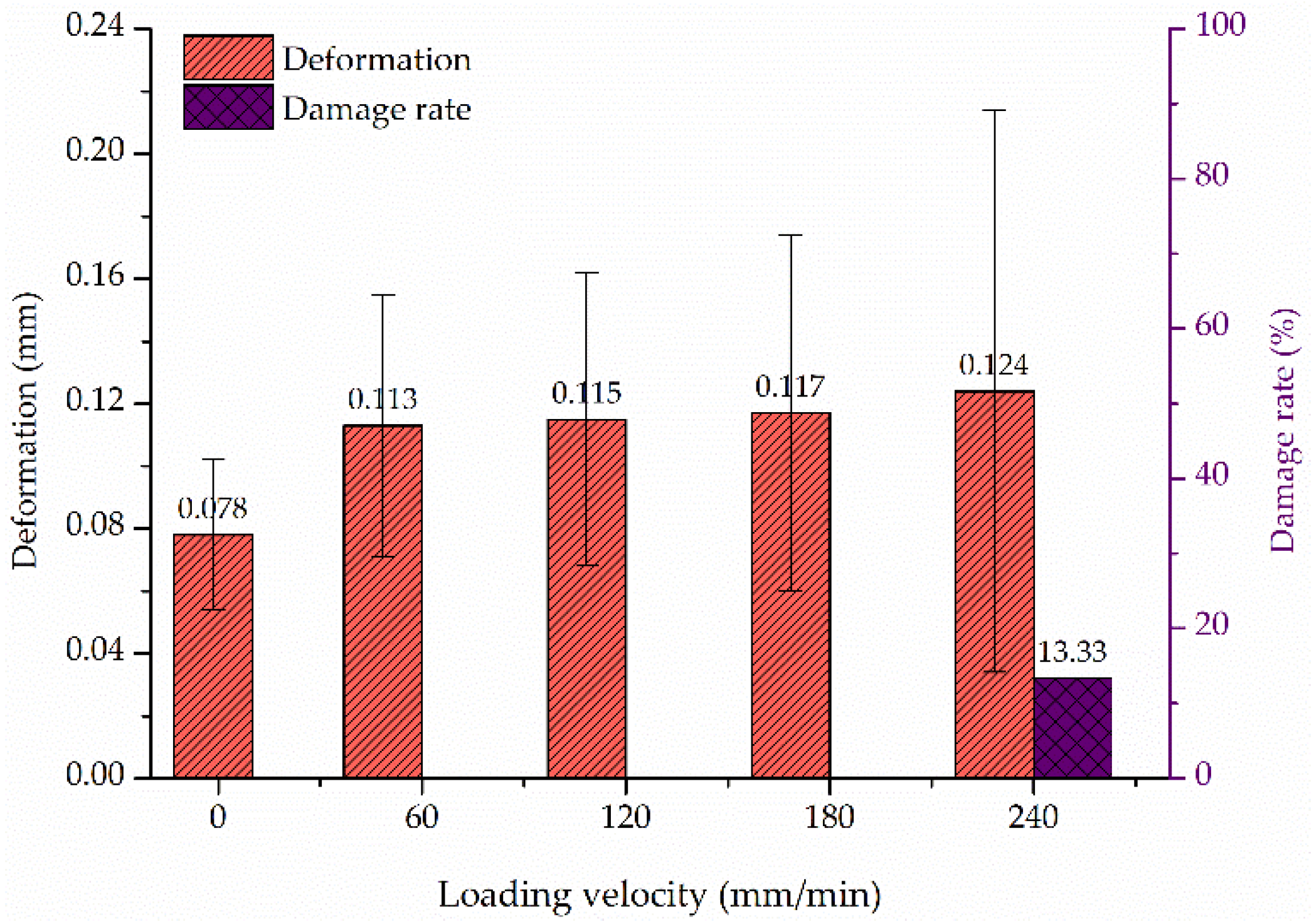
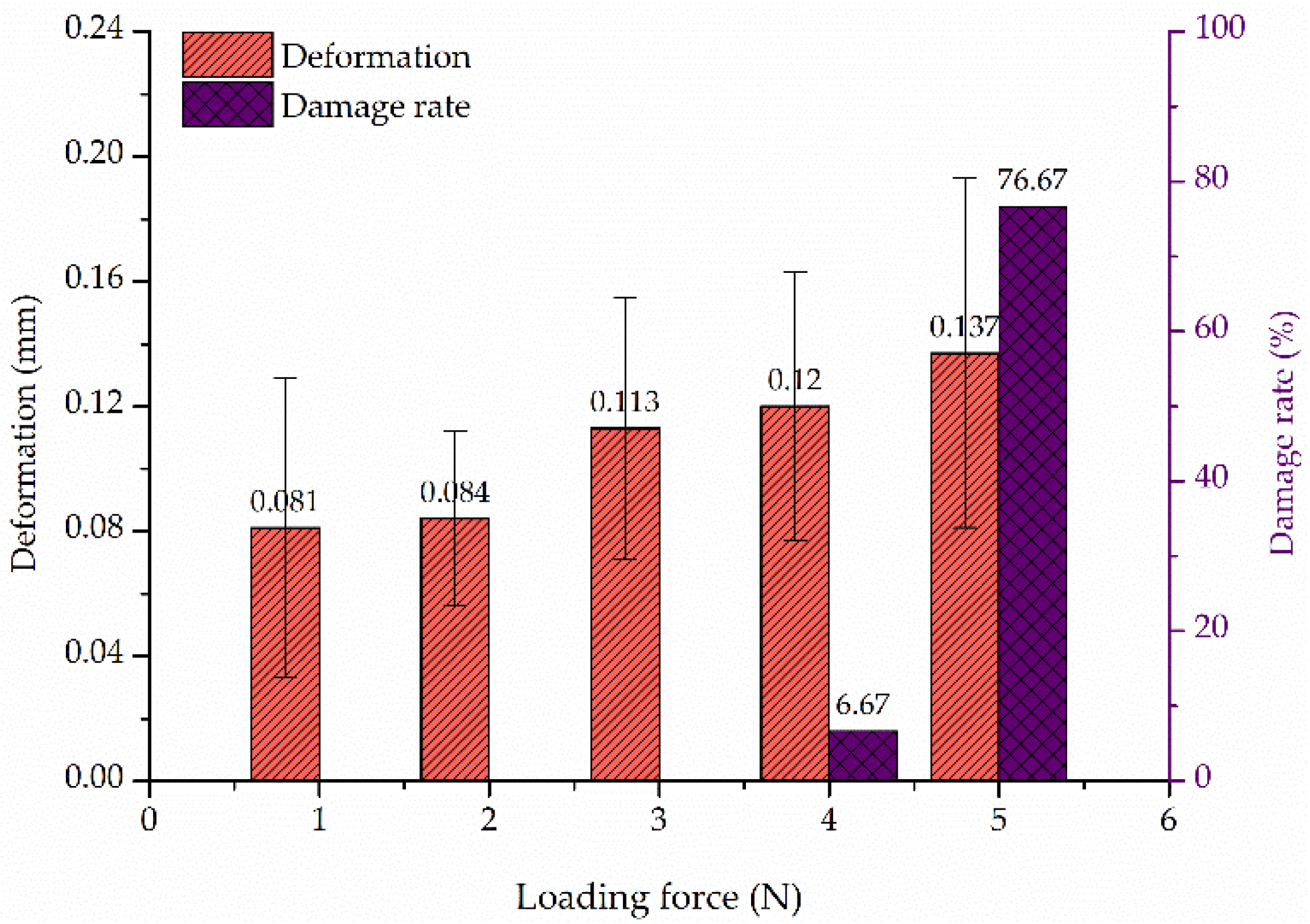
3.3. Single-Factor Experiment Analysis and Discussion
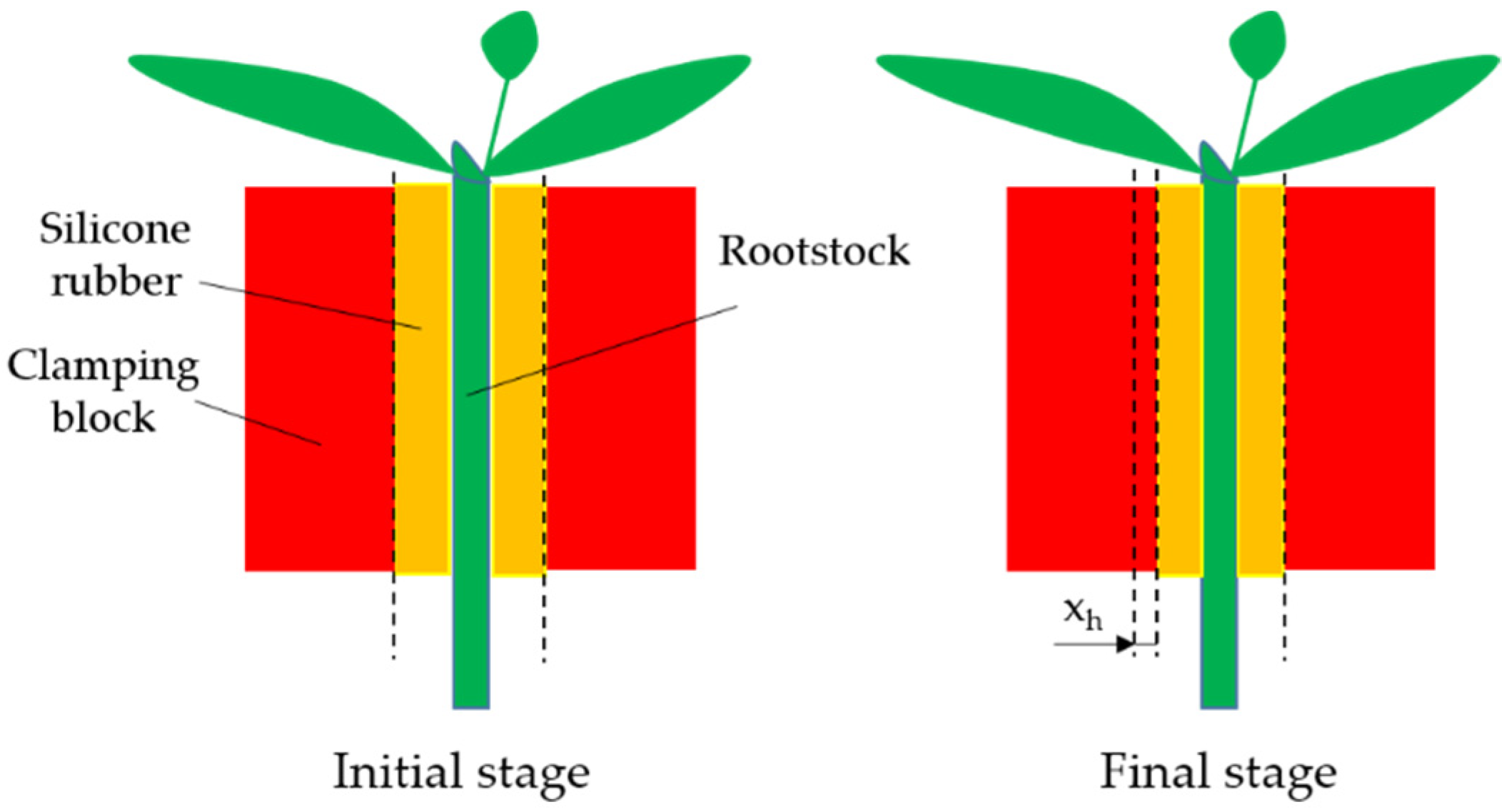
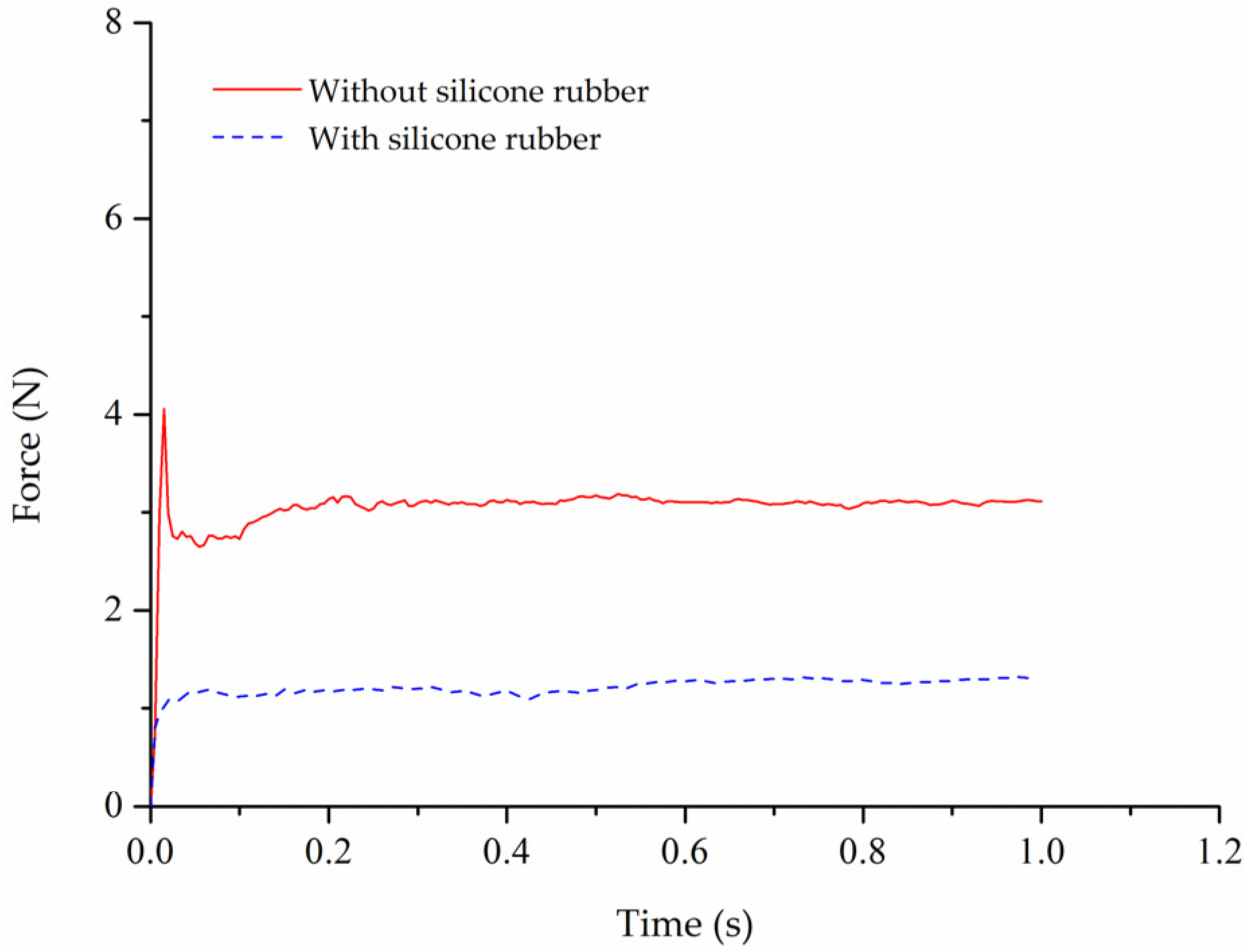
3.4. Holding Test for Rootstock
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Food and Agriculture Organization (FAO). STAT 2019. Available online: http://www.fao.org/faostat/zh/#data/QC (accessed on 9 August 2021).
- Sun, Y.; Wang, Y.; Han, L.R.; Zhang, X.; Feng, J.T. Antifungal activity and action mode of cuminic acid from the seeds of Cuminum cyminum L. against Fusarium oxysporum f. sp. Niveum (FON) causing Fusarium wilt on watermelon. Molecules 2017, 22, 2053. [Google Scholar] [CrossRef] [Green Version]
- Ling, N.; Zhang, W.; Wang, D.; Mao, J.; Huang, Q.; Guo, S.; Shen, Q. Root exudates from grafted-root watermelon showed a certain contribution in inhibiting Fusarium oxysporum f. sp. Niveum. PLoS ONE 2013, 8, e63383. [Google Scholar] [CrossRef]
- Bie, Z.; Nawaz, M.A.; Huang, Y.; Lee, J.M.; Colla, G. Introduction of vegetable grafting. In Proceedings of the Vegetable Grafting: Principles and Practices, CAB International, Wallingford, UK, 5 June 2017; pp. 1–21. [Google Scholar] [CrossRef]
- Lv, H.; Cao, H.; Nawaz, M.A.; Hamza, S.; Huang, Y.; Cheng, F.; Kong, Q.; Bie, Z. Wheat intercropping enhances the resistance of watermelon to fusarium wilt. Front. Plant Sci. 2018, 9, 696. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rouphael, Y.; Venema, J.; Edelstein, M.; Savvas, D.; Colla, G.; Ntatsi, G.; Ben-Hur, M.; Kumar, P.; Schwarz, D. Grafting as a tool for tolerance of abiotic stress. In Proceedings of the Vegetable Grafting: Principles and Practices, CAB International, Wallingford, UK, 5 June 2017; pp. 171–215. [Google Scholar] [CrossRef]
- Lee, J.M.; Kubota, C.; Tsao, S.J.; Bie, Z.; Echevarria, P.H.; Morra, L.; Oda, M. Current status of vegetable grafting: Diffusion, grafting techniques, automation. Sci. Hortic. 2010, 127, 93–105. [Google Scholar] [CrossRef]
- Zhang, K.L.; Chu, J.; Zhang, T.Z.; Yin, Q.; Kong, Y.S.; Liu, Z. Development status and analysis of automatic grafting technology for vegetables. Trans. CSAM 2017, 48, 1–13. [Google Scholar] [CrossRef]
- Mohamed, F.; El-Hamed, K.; Elwan, M.; Hussien, M.A. Impact of grafting on watermelon growth, fruit yield and quality. Veg. Crop. Res. Bull. 2012, 76, 99–118. [Google Scholar] [CrossRef]
- Devi, P.; Lukas, S.; Miles, C. Advances in watermelon grafting to increase efficiency and automation. Horticulturae 2020, 6, 88. [Google Scholar] [CrossRef]
- Lou, J.Z. Mechanism Study and Optimization Design of Inclined-Insert Grafting Device of Cucurbita Vegetable. Ph.D. Thesis, Zhejiang University, Hangzhou, China, 2014. [Google Scholar]
- Jiang, K. Study on Mechanism and Experimental Device of Splice Mechanical Grafting of cucurbit. Ph.D. Thesis, Northeast Agricultural University, Harbin, China, 2019. [Google Scholar]
- Lou, J.Z.; Wu, K.; Chen, J.Y.; Ma, G.Y.; Li, J.P. Design and test of self-adaptive stock cotyledons pressing and clamping mechanism for oblique inserted grafting of Cucurbitaceous vegetables. Trans. CSAE 2018, 34, 76–82. [Google Scholar] [CrossRef]
- Zou, L.; Yuan, J.; Liu, X.; Li, J.; Niu, Z. Burgers viscoelastic model-based variable stiffness design of compliant clamping mechanism for leafy greens harvesting. Biosyst. Eng. 2021, 208, 1–15. [Google Scholar] [CrossRef]
- Higashimori, M.; Yoshimoto, K.; Kaneko, M. Active shaping of an unknown rheological object based on deformation decomposition into elasticity and plasticity. In Proceedings of the IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010. [Google Scholar] [CrossRef]
- Sakamoto, N.; Higashimori, M.; Tsuji, T.; Kaneko, M. An optimum design of robotic hand for handling a viscoelastic object based on maxwell model. In Proceedings of the IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007. [Google Scholar] [CrossRef]
- Taylor, L.S.; Lerner, A.L.; Rubens, D.J.; Parker, K.J. A kelvin-voight fractional derivative model for viscoelastic characterization of liver tissue. In Proceedings of the ASME International Mechanical Engineering Congress & Exposition, New Orleans, LA, USA, 17–22 November 2002. [Google Scholar] [CrossRef] [Green Version]
- Sakamoto, N.; Higashimori, M.; Tsuji, T.; Kaneko, M. An optimum design of robotic food handling by using Burger model. Intell. Serv. Robot. 2009, 2, 53–60. [Google Scholar] [CrossRef]
- Zhang, B.; Zhou, J.; Meng, Y.; Zhang, N.; Gu, B.; Yan, Z.; Idris, S. Comparative study of mechanical damage caused by a two-finger tomato gripper with different robotic grasping patterns for harvesting robots. Biosyst. Eng. 2018, 171, 245–257. [Google Scholar] [CrossRef]
- Wu, K.; Lou, J.Z.; Li, C.; Li, J.P. Experimental evaluation of rootstock clamping device for inclined inserted grafting of melons. Agriculture 2021, 11, 736. [Google Scholar] [CrossRef]
- Nehdi, M.; Rahman, M.A. Estimating rheological properties of cement pastes using various rheological models for different test geometry, gap and surface friction. Cem. Concr. Res. 2004, 34, 1993–2007. [Google Scholar] [CrossRef]
- Senoo, T.; Koike, M.; Murakami, K.; Ishikawa, M. Impedance control design based on plastic deformation for a robotic arm. IEEE Robot. Autom. Lett. 2016, 2, 209–216. [Google Scholar] [CrossRef]
- Zhang, N. Research Oil Online Estimation of Tomato Viscoelastic Parameters. Master’s Thesis, Nanjing Agricultural University, Nanjing, China, 2017. [Google Scholar]
- Sun, X.; Koksel, F.; Nickerson, M.T.; Scanlon, M.G. Modeling the viscoelastic behavior of wheat flour dough prepared from a wide range of formulations. Food Hydrocolloid 2019, 98, 105129. [Google Scholar] [CrossRef]
- Zhou, J.; Meng, Y.; Zhang, N.; Yan, Z. Impact of robot grasping control modes on mechanical damage of tomato. Trans. CSAM 2017, 48, 21–27. [Google Scholar] [CrossRef]
- Sun, G.H. Studies on Rheological Properties of Characteristic Nectarine. Master’s Thesis, Jiangsu University, Zhenjiang, China, 2005. [Google Scholar]
- Guo, W.B.; Wang, Z.P.; Hu, F.; Hou, Z.B.; De, X.H. Study on creep properties of potato pulp. Feed Res. 2021, 11, 115–118. [Google Scholar] [CrossRef]
- Li, W. Study on Creep Properties of Maize Straw Rubbed during Open Compression. Master’s Thesis, Inner Mongolia Agriculture University, Hohhot, China, 2011. [Google Scholar]
- Li, X.Y.; Wang, W.; Sun, L.; Feng, G.H. A study on rheological characteristics of apple I. testing creep properties. J. Northwest A F Univ. 1991, 19, 70–74. [Google Scholar]
- Wang, W.; Cheng, Y.; Tan, G.; Tao, J. Analysis of aggregate morphological characteristics for viscoelastic properties of asphalt mixes using simplex lattice design. Materials 2018, 11, 1908. [Google Scholar] [CrossRef] [Green Version]
- Wu, F.; Chen, J.; Zou, Q. A nonlinear creep damage model for salt rock. Int. J. Damage Mech. 2018, 28, 1–14. [Google Scholar] [CrossRef]
- Gao, J.J.; Guo, W.B.; Yu, Z.H. Study on the compressibility of potato residue. Food Mach. 2018, 34, 50–53. [Google Scholar] [CrossRef]
- Lu, L.; Cao, J.; Li, G. Giant reversible elongation upon cooling and contraction upon heating for a crosslinked cis poly (1,4-butadiene) system at temperatures below zero Celsius. Sci. Rep. 2018, 8, 14233. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Force sensor | 100 N |
| The diameter of probe | 50 mm |
| The set height of probe | 10 mm |
| Pre-test velocity | 30 mm/min |
| Test velocity | 10–240 mm/min |
| Post-test velocity | 30 mm/min |
| Initial contact force | 0.1 N |
| Loading force | 1–5 N |
| Sampling frequency | 1000 points/s |
| Loading Time | 30 s |
| Test Velocity/ (mm/min) | k1/N·mm−1 | k2/N·mm−1 | c1/N·s·mm−1 | c2/N·s·mm−1 | R2 |
|---|---|---|---|---|---|
| 10 | 6.23 | 74.48 | 3031.19 | 313.93 | 0.992 |
| 60 | 5.33 | 52.25 | 2486.59 | 159.50 | 0.991 |
| 120 | 6.86 | 53.98 | 2755.67 | 154.58 | 0.990 |
| 180 | 5.28 | 79.03 | 2882.64 | 225.19 | 0.982 |
| 240 | 5.66 | 65.28 | 2823.59 | 254.57 | 0.989 |
| Loading Force/ N | k1/N·mm−1 | k2/N·mm−1 | c1/N·s·mm−1 | c2/N·s·mm−1 | R2 |
|---|---|---|---|---|---|
| 1 | 3.40 | 28.58 | 1081.87 | 69.74 | 0.985 |
| 2 | 4.21 | 43.58 | 3220.18 | 130.12 | 0.987 |
| 3 | 5.33 | 52.25 | 2486.59 | 159.50 | 0.991 |
| 4 | 6.59 | 73.50 | 2643.97 | 152.66 | 0.991 |
| 5 | 6.91 | 71.40 | 3140.74 | 151.67 | 0.991 |
| Source | Sum of Squares | df | Mean Square | F-Value | p-Value | Significant |
|---|---|---|---|---|---|---|
| Loading force | 0.069 | 4 | 0.017 | 6.181 | <0.0001 | Yes |
| Test velocity | 0.039 | 4 | 0.01 | 3.515 | 0.008 | Yes |
| Error | 0.724 | 261 | ||||
| Total | 3.950 | 270 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, K.; Lou, J.; Li, C.; Luo, W.; Li, C.; Li, J. Creep Modelling of Rootstock during Holding in Watermelon Grafting. Agriculture 2021, 11, 1266. https://doi.org/10.3390/agriculture11121266
Wu K, Lou J, Li C, Luo W, Li C, Li J. Creep Modelling of Rootstock during Holding in Watermelon Grafting. Agriculture. 2021; 11(12):1266. https://doi.org/10.3390/agriculture11121266
Chicago/Turabian StyleWu, Kang, Jianzhong Lou, Chen Li, Wei Luo, Congcong Li, and Jianping Li. 2021. "Creep Modelling of Rootstock during Holding in Watermelon Grafting" Agriculture 11, no. 12: 1266. https://doi.org/10.3390/agriculture11121266