Research on a Low-Cost, Open-Source, and Remote Monitoring Data Collector to Predict Livestock’s Habits Based on Location and Auditory Information: A Case Study from Vietnam


Abstract
:1. Introduction
2. Literature Review
2.1. IoT Node-Based Scheme
2.2. Livestock Monitoring
2.3. Network Communication
2.4. Bio-Acoustic Approach
3. Proposed Solutions
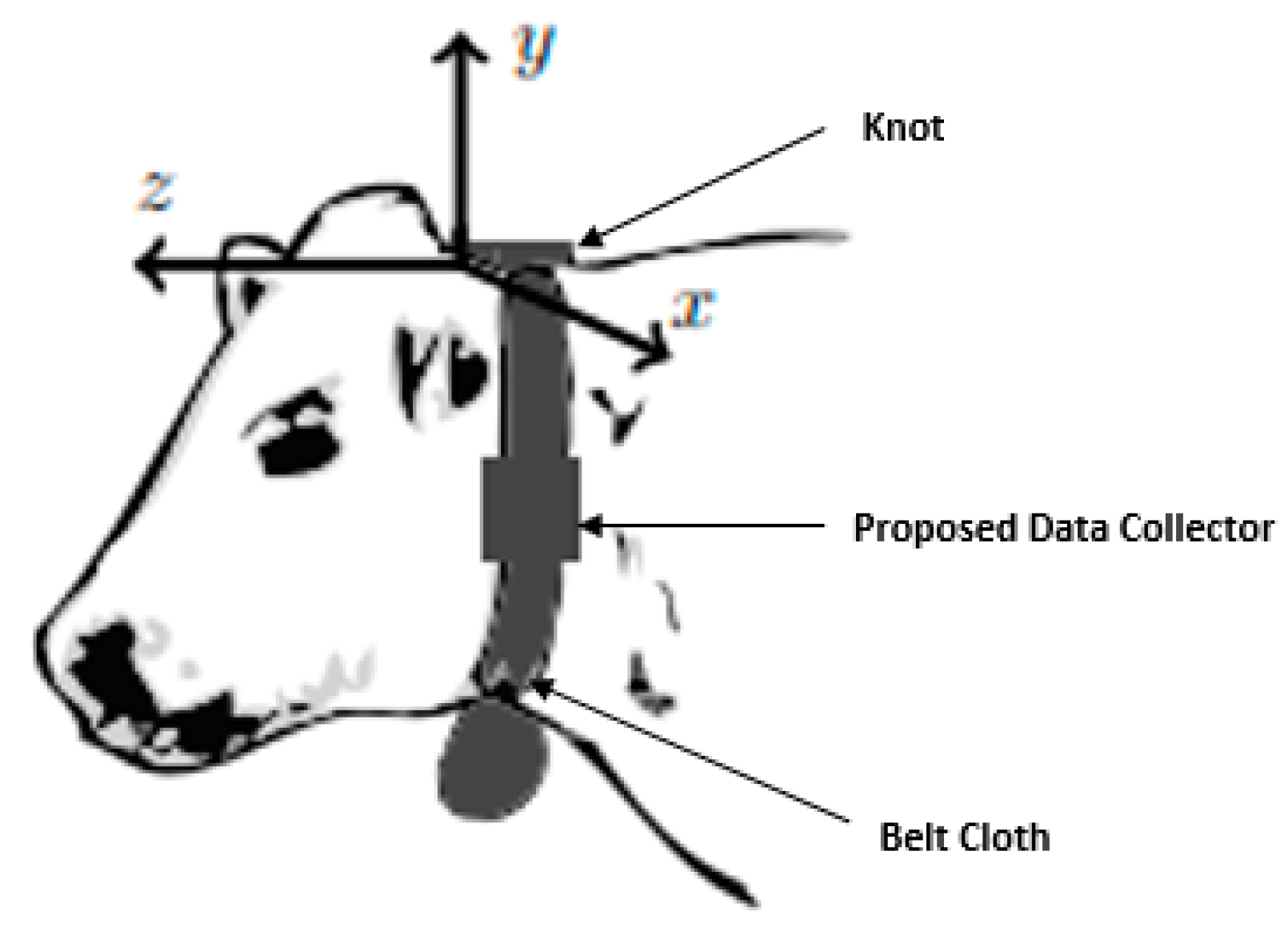
3.1. Methodology
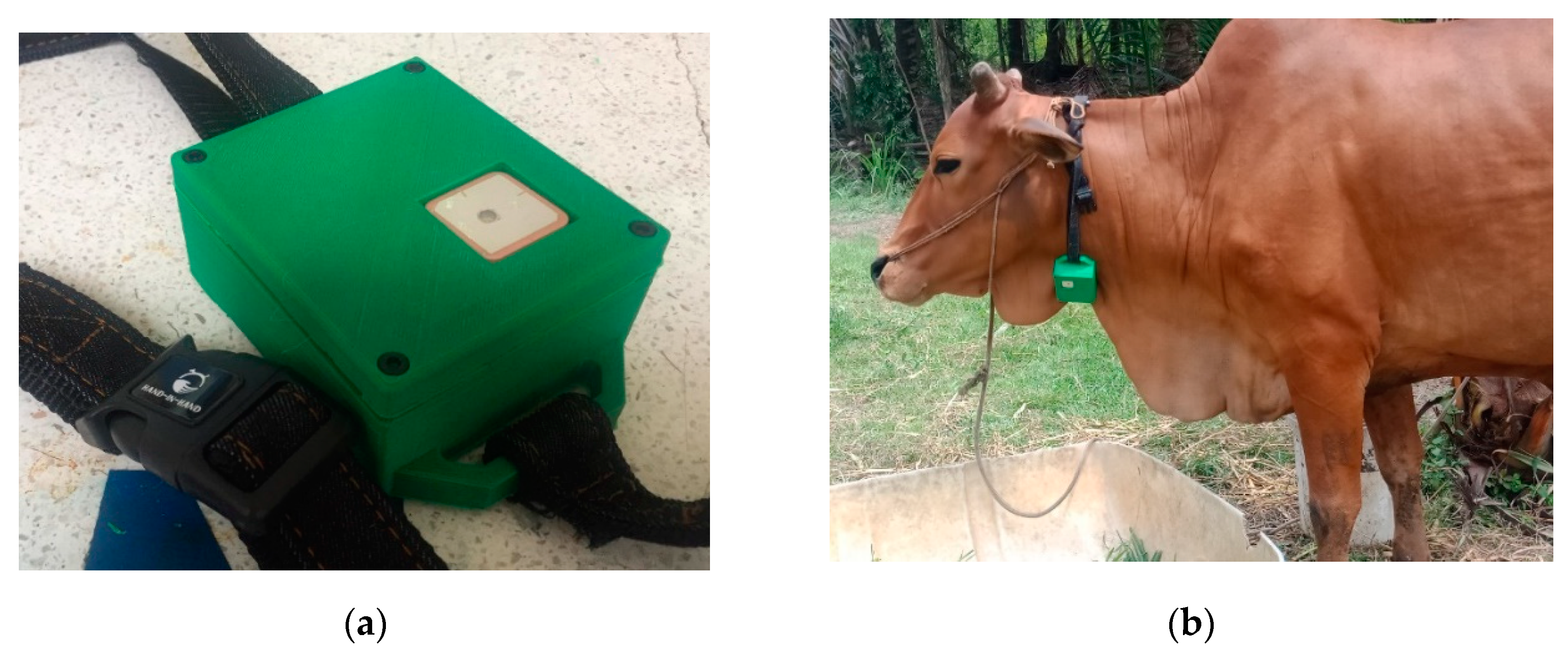
3.2. Do-It-Yourself Hardware
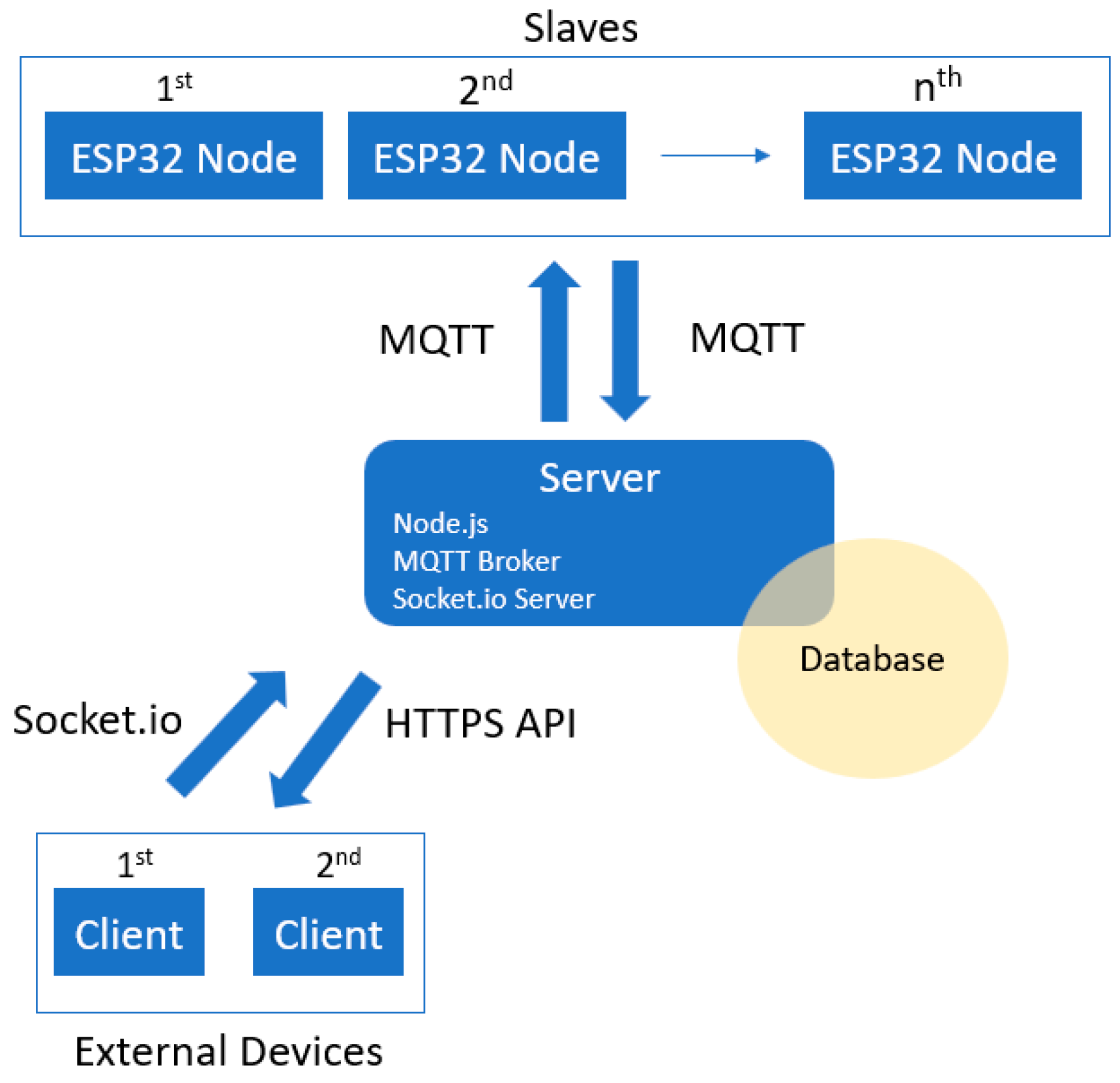
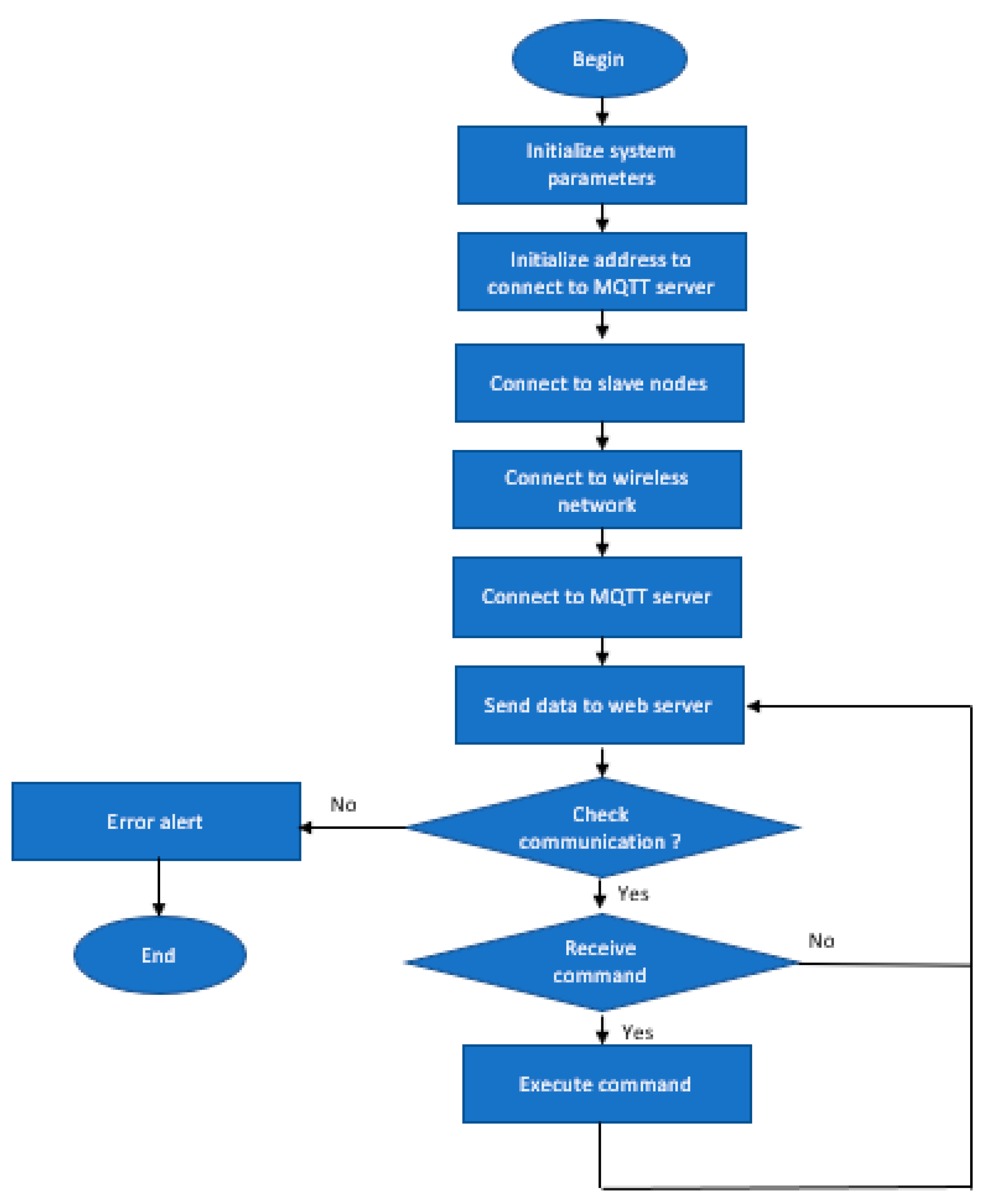
3.2.1. Network Protocol
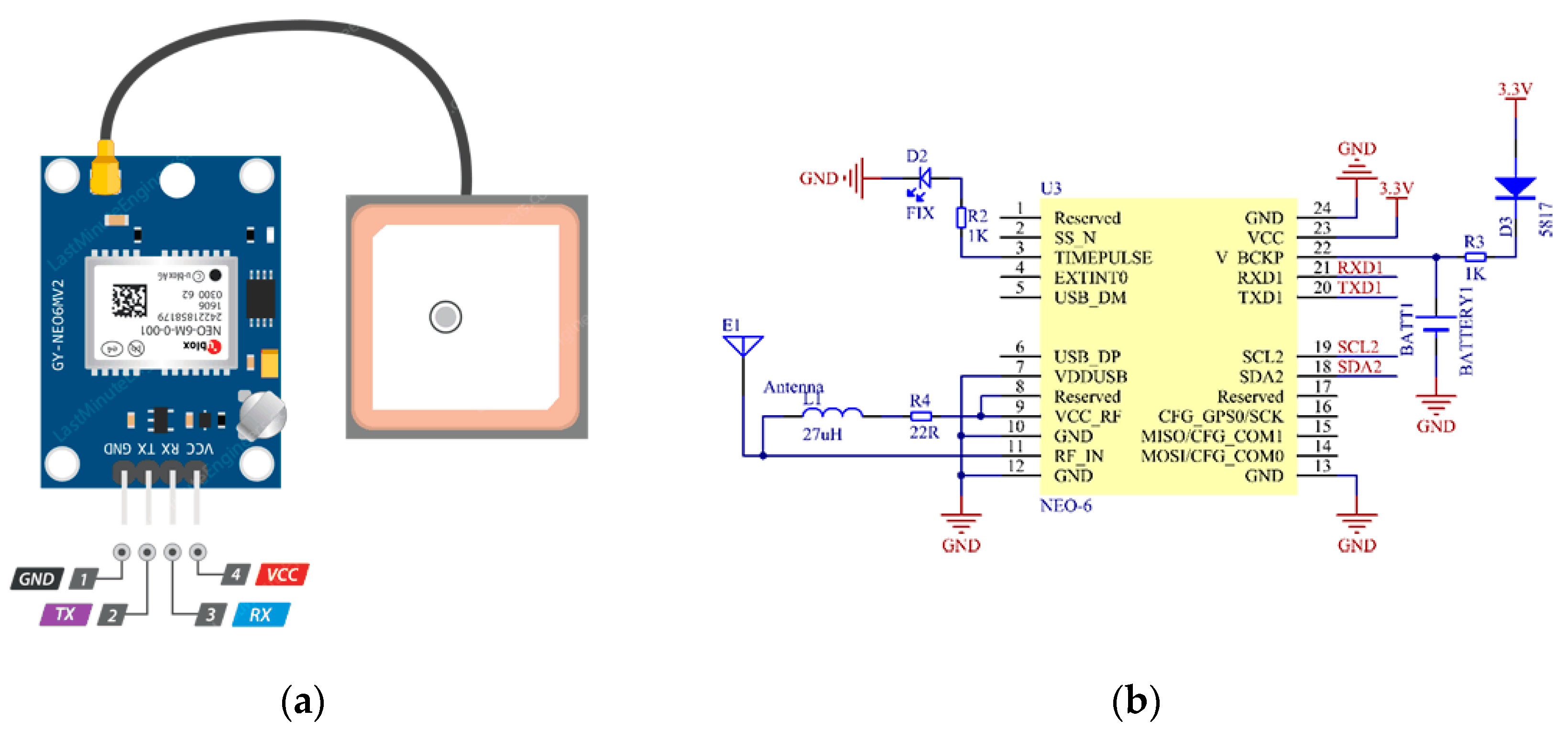
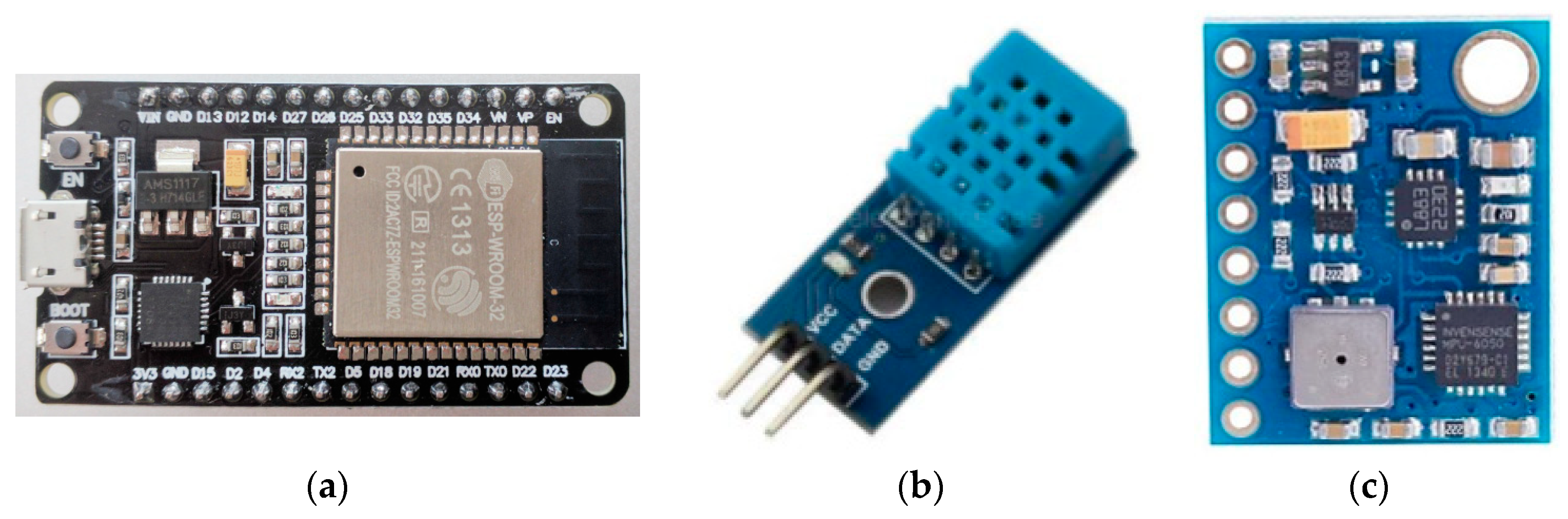
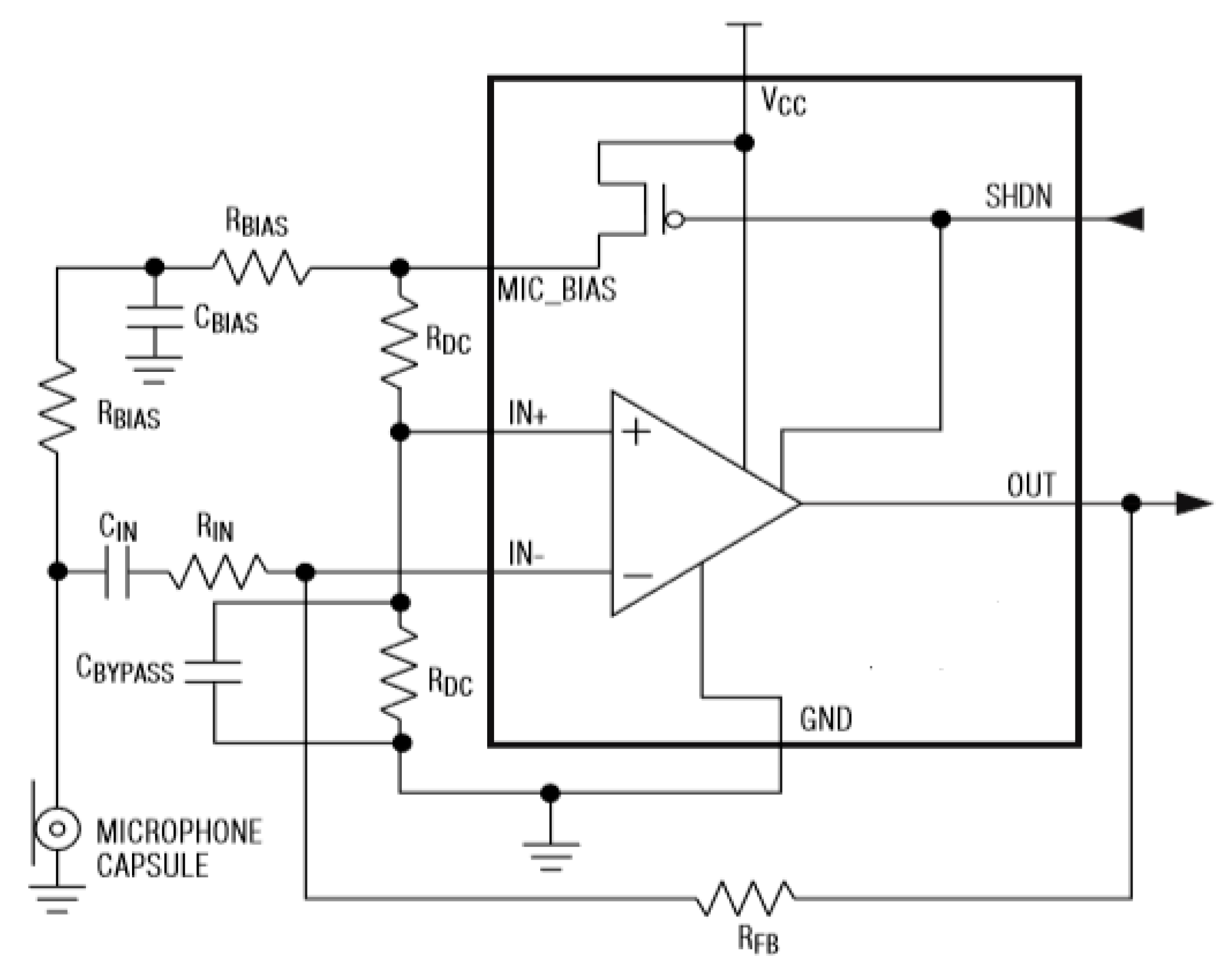
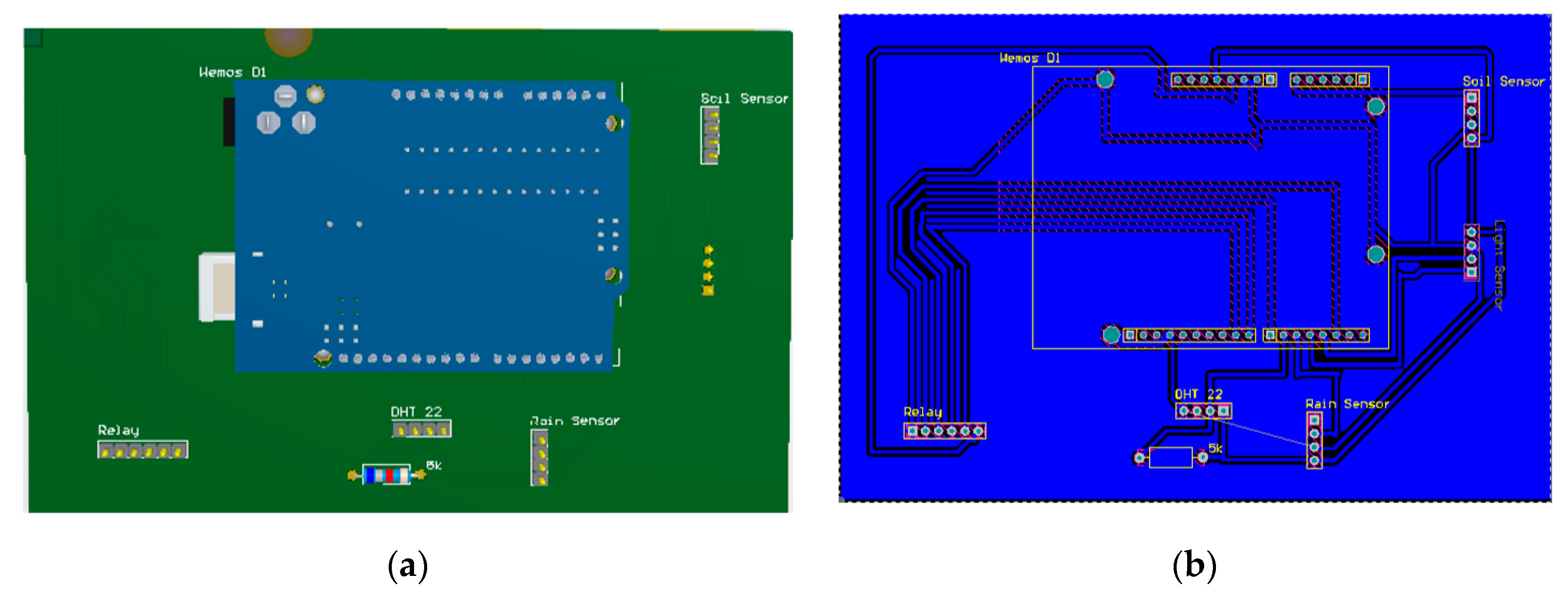
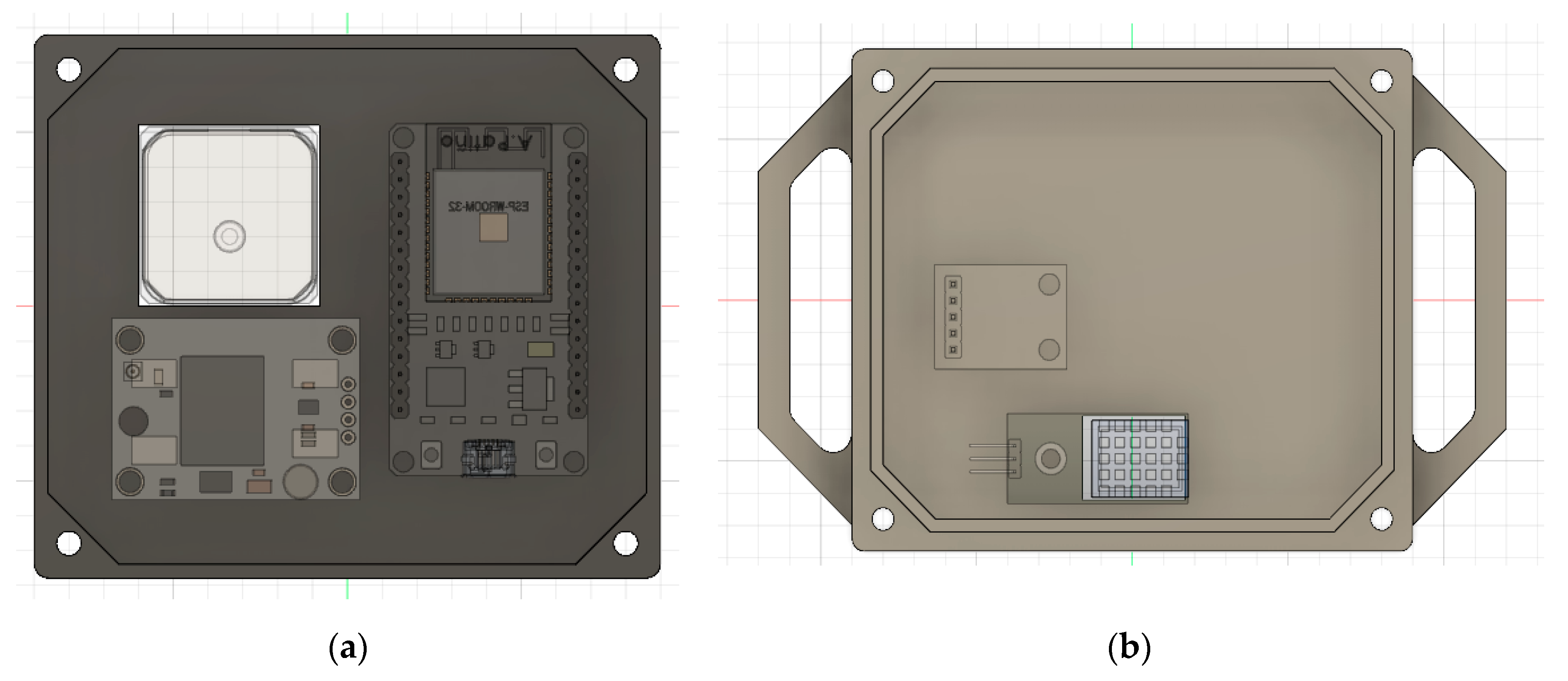
3.2.2. Electronic Components
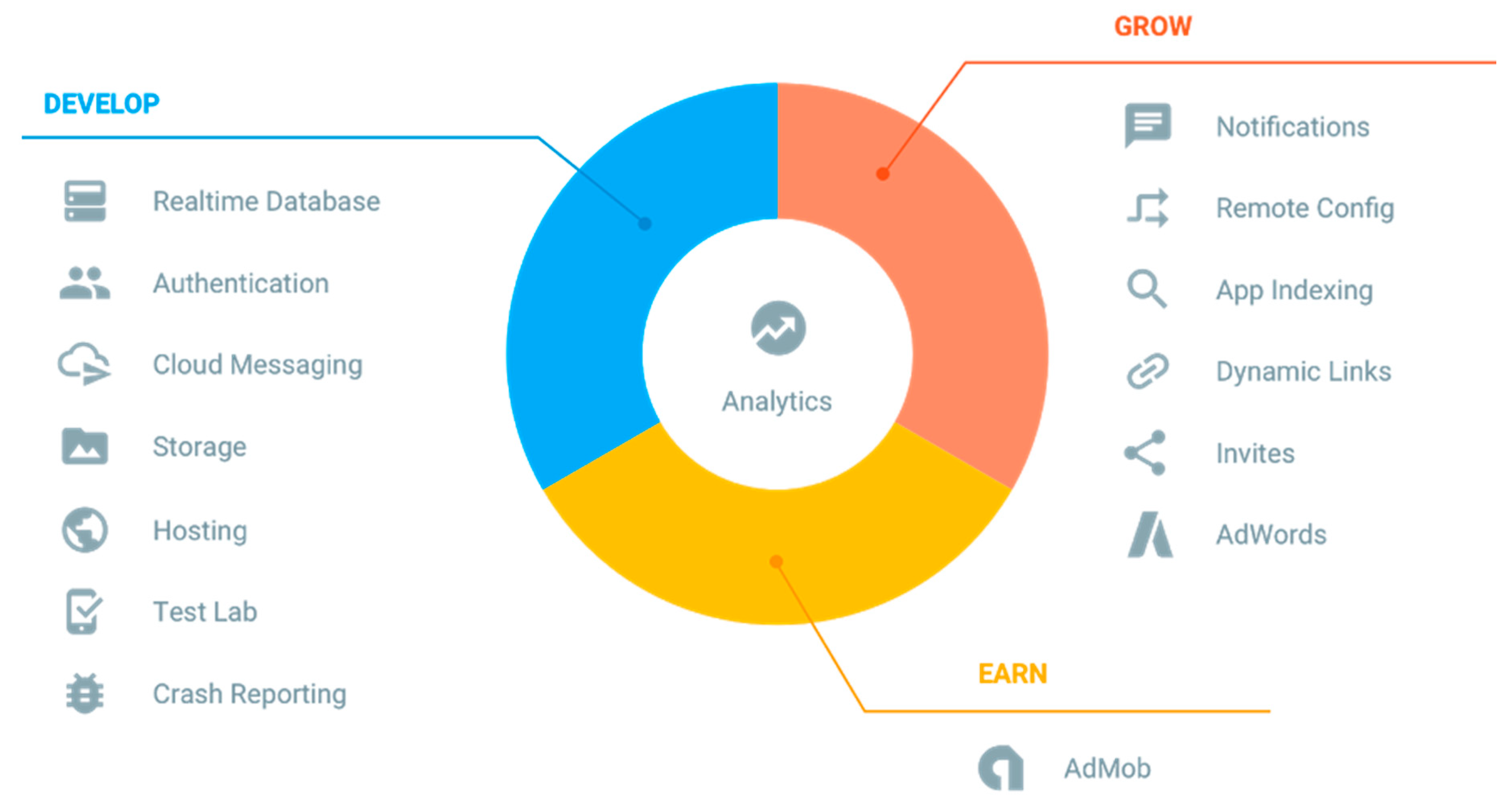
3.3. The Open Software
- ▪
- Real-time database: The database provides application developers an Application Programming Interface (API) that allows application data to be synchronized across clients and stored on Firebase’s cloud. The company offers client libraries that enable integration with Android, iOS, or Node.js applications.
- ▪
- Firebase authentication: Firebase can authenticate users using only client-side code. It supports social login providers Facebook, GitHub, Twitter, and Google, as well as other service providers such as Apple or Microsoft.
- ▪
- Firebase hosting: Firebase is a static and dynamic web hosting service that launched on May 13, 2014. It supports hosting static files such as Cascading Style Sheets (CSS), Hypertext Markup Language (HTML), or JavaScript. The service delivers files over a content delivery network through HTTP Secure and Secure Socket Layer encryption.
- ▪
- Cloud messaging: This is a cross-platform solution for messages and notifications for Android, iOS, and web applications.
- ▪
- A rich layout editor that allows users to drag-and-drop User Interface (UI) components and offers the option to preview layouts on multiple screen configurations.
- ▪
- Built-in support for the Google Cloud platform, enabling integration with Firebase Cloud Messaging and Google App Engine.
- ▪
- Android Virtual Device (Emulator) to run and debug apps in the Android Studio.
- ▪
- Template-based wizards to create common Android designs and components.
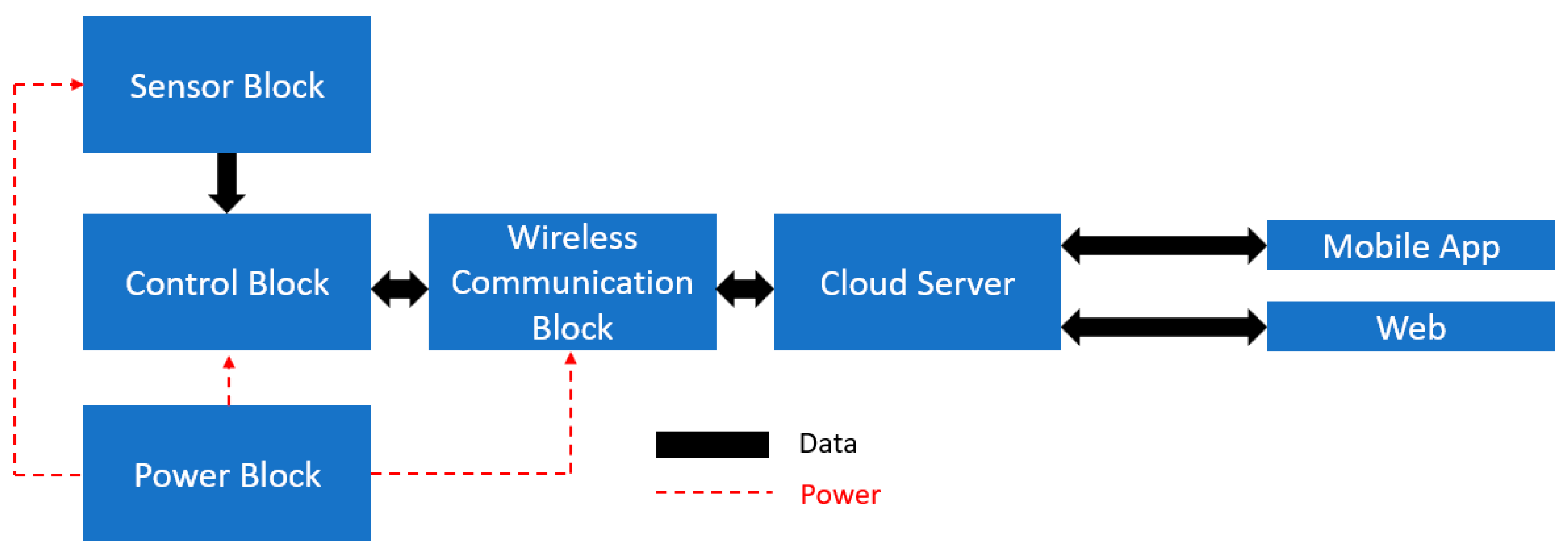
3.4. Architecture of the Open Control Platform
4. Experimental Results
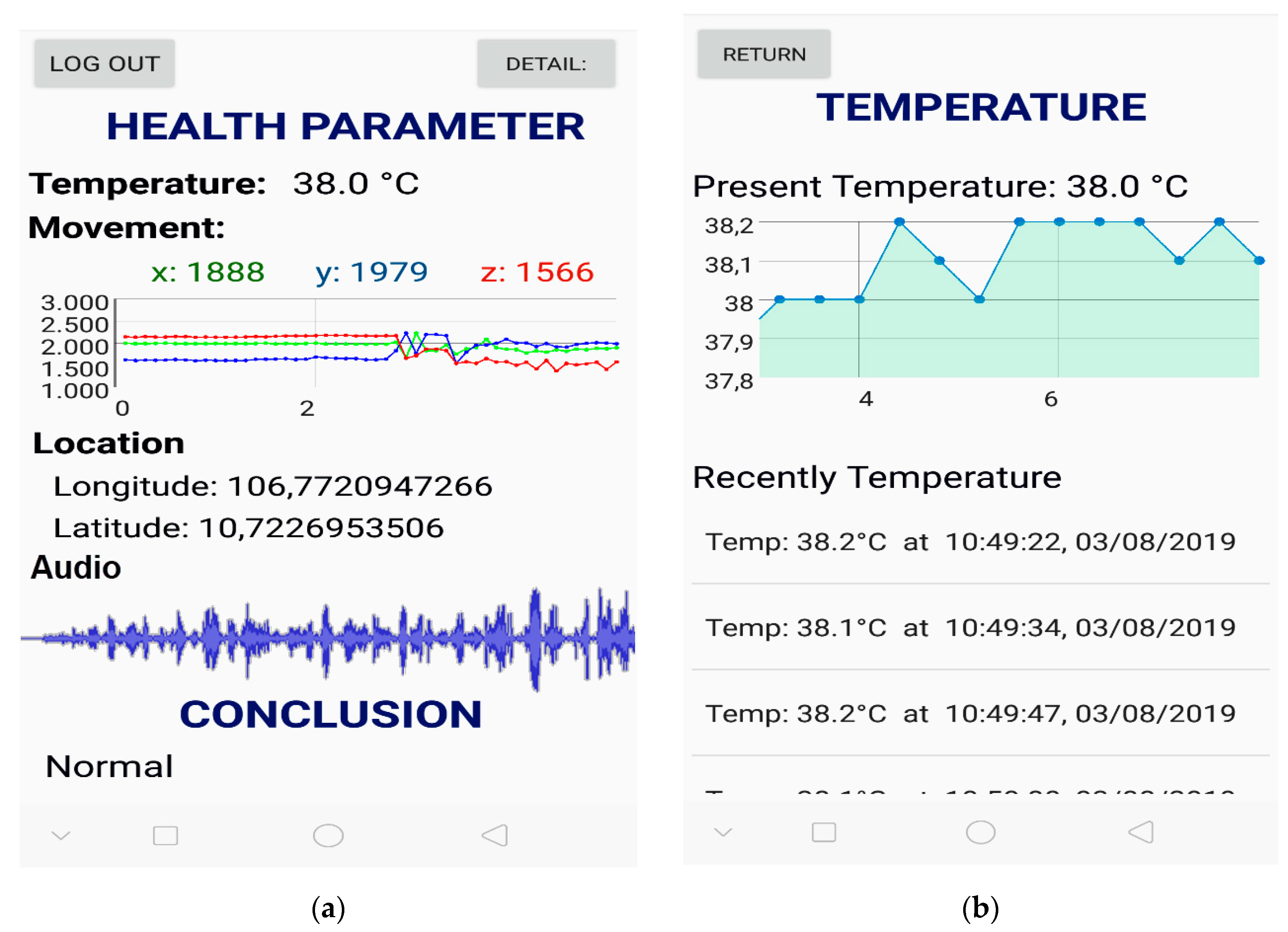
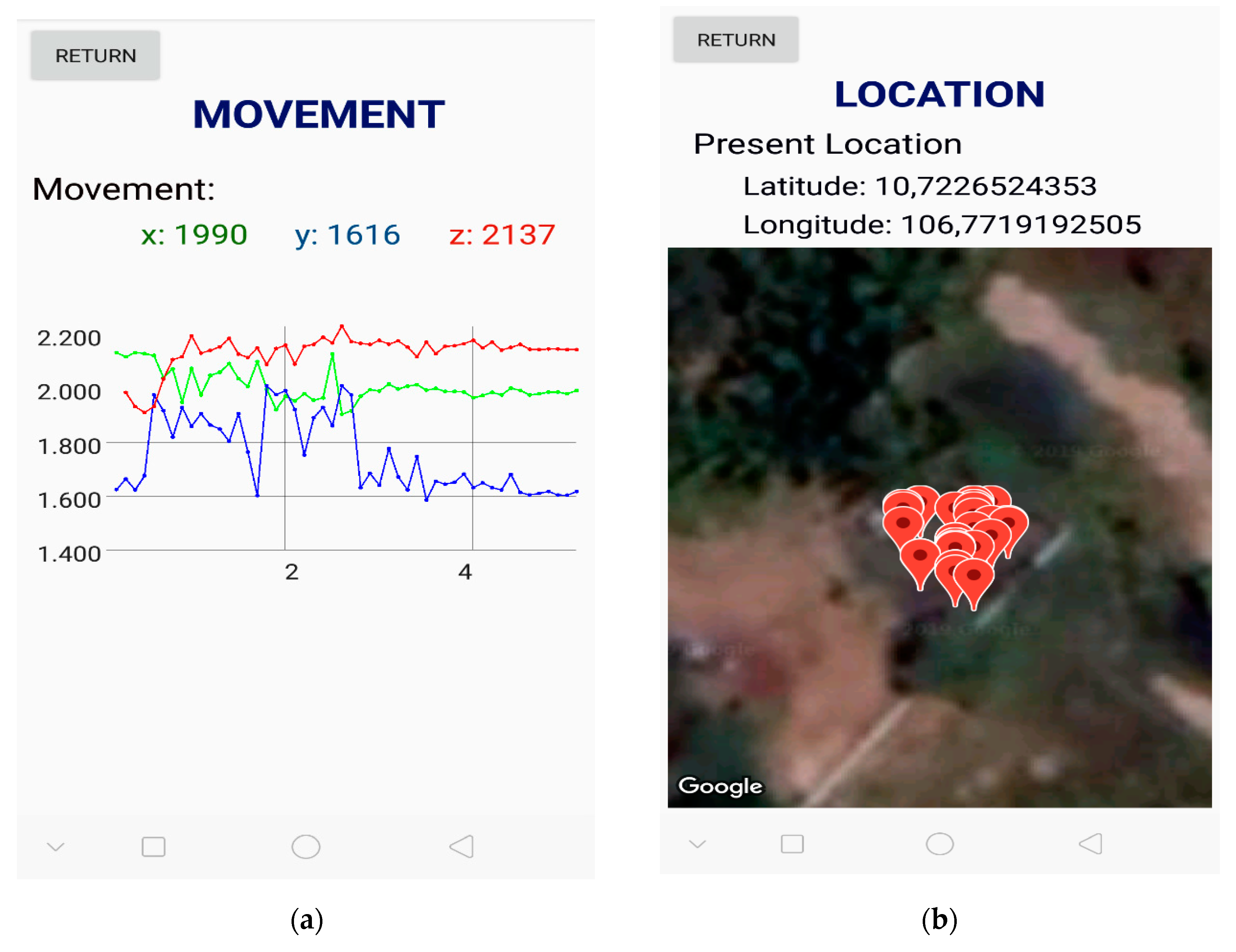
4.1. Validated Performance from Practical Scenario
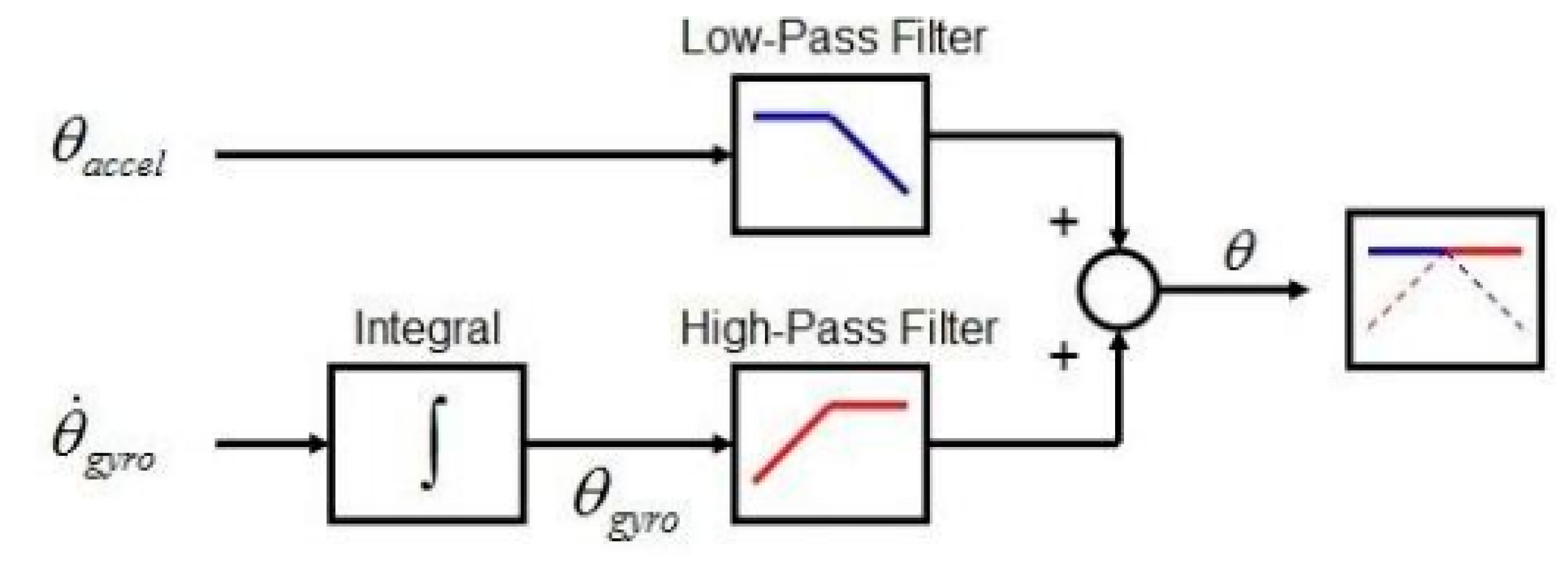
4.2. Implementation of Integrated Filter
5. Discussion
5.1. Battery Lifetime Estimation
5.2. Hardware
5.3. Software
5.4. Configuration of the Proposed Approach
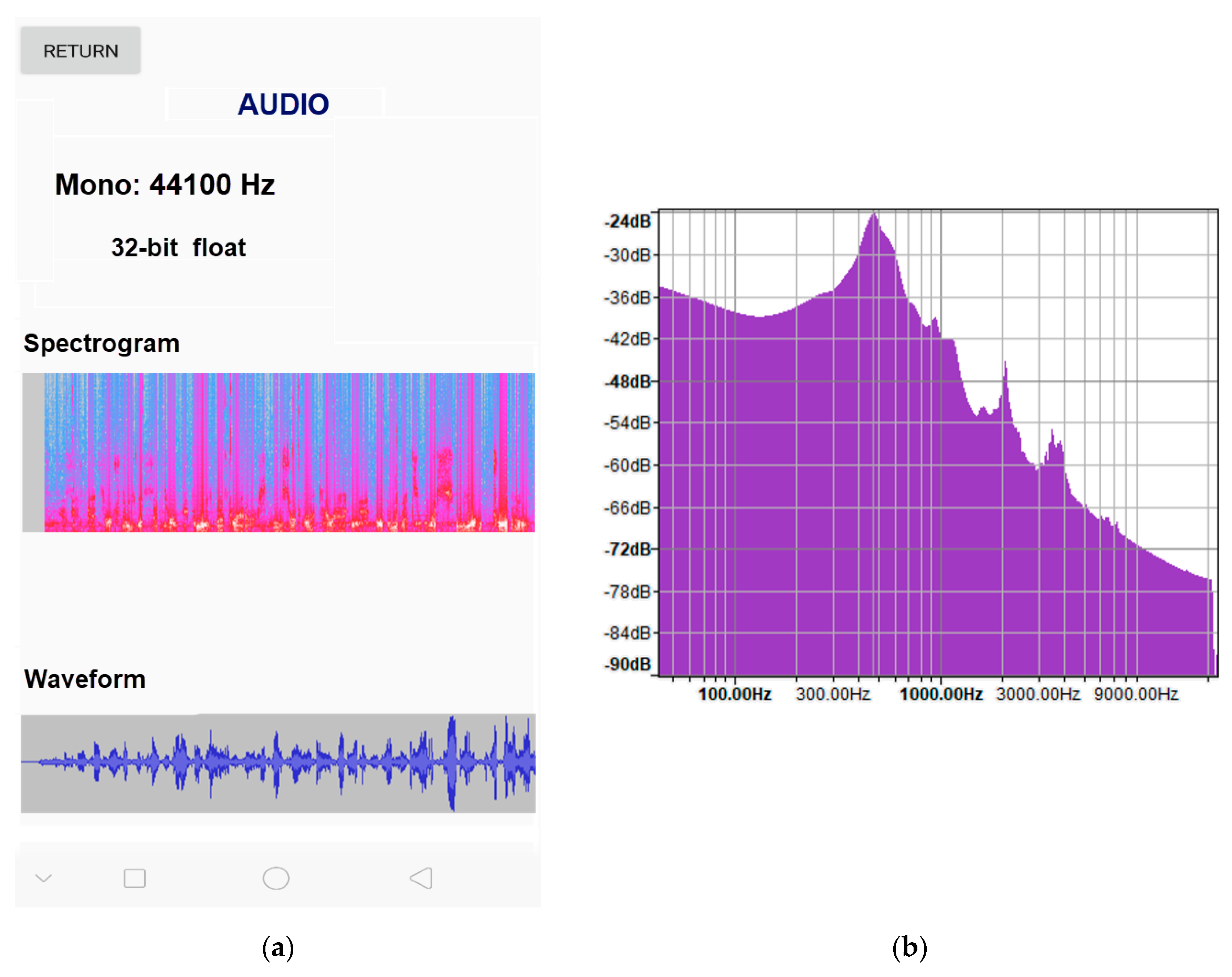
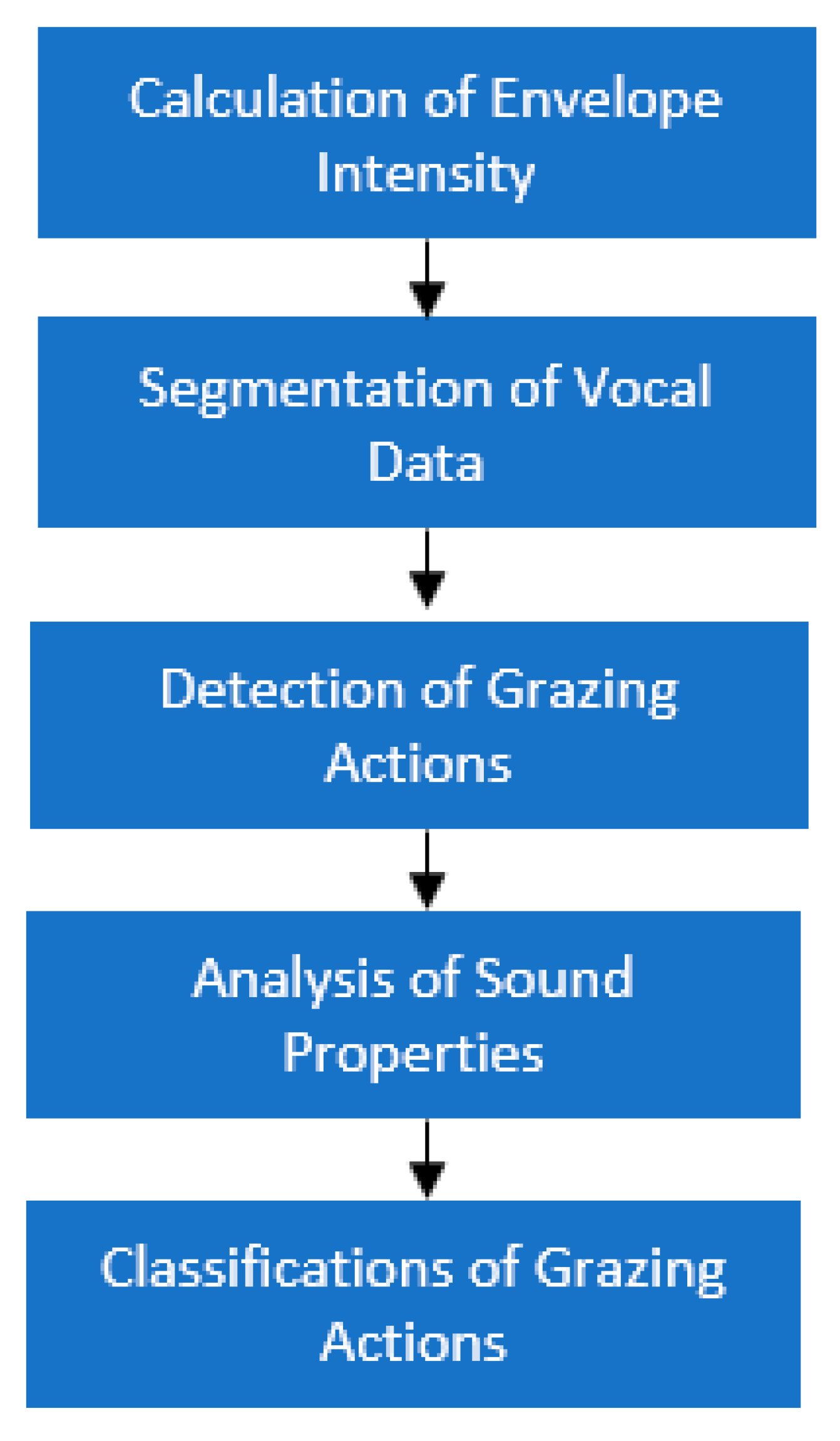
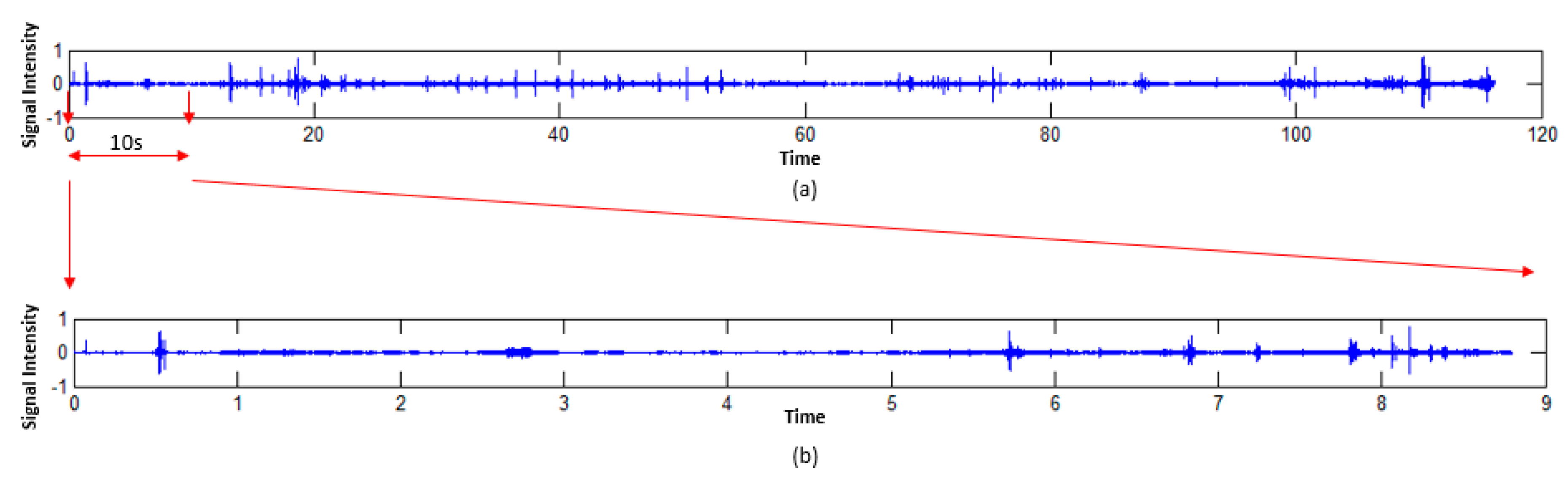
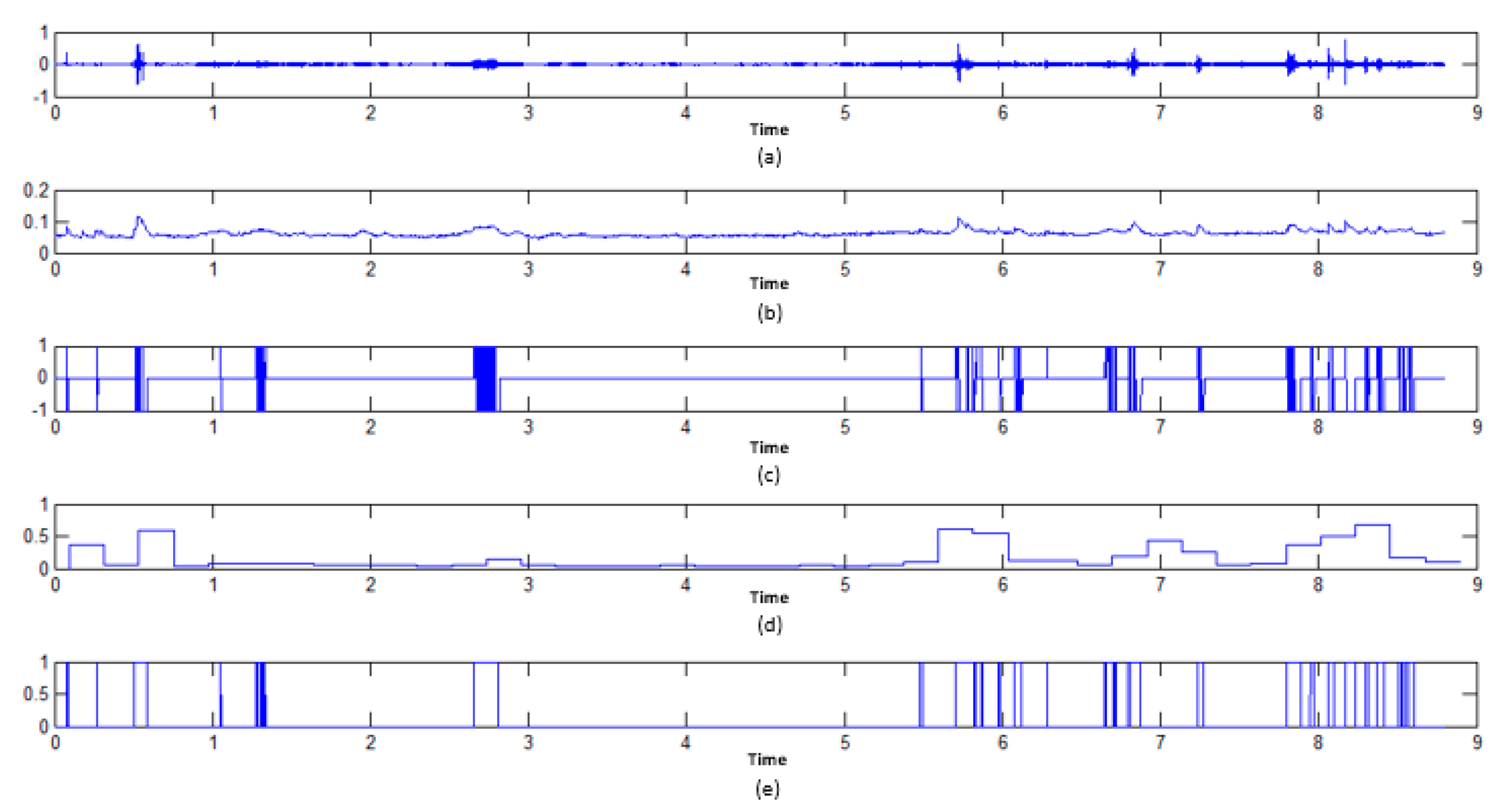
5.5. Acoustic Feature Extraction
6. Conclusions
- —
- This paper might offer solutions to avoid the unknown issues of changing environments of the livestock industry using different kinds of modern technologies. The collected data of the physical actions of animals can be used to alert farmers of diseases and breeding work.
- —
- The comfortable living conditions of the device help livestock to relax, and thus promote their good health and physical well-being. Moreover, large numbers of animals can be taken care with minimal investment.
- —
- With its compact size, its lightweight feature, and its easy maintenance, the proposed device can be mass-produced in a short period of time. Furthermore, the multi-functions and extendable ability are also benefits of this low-cost instrument.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zanella, A.; Bui, N.; Castellani, A.; Vangelista, L.; Zorzi, M. Internet of things for smart cities. IEEE Internet Things J. 2014, 1, 22–32. [Google Scholar] [CrossRef]
- Tao, F.; Zuo, Y.; Da Xu, L.; Zhang, L. IoT-based intelligent perception and access of manufacturing resource toward cloud manufacturing. IEEE Trans. Ind. Inform. 2014, 10, 1547–1557. [Google Scholar]
- Catarinucci, L.; De Donno, D.; Mainetti, L.; Palano, L.; Patrono, L.; Stefanizzi, M.L.; Tarricone, L. An IoT-aware architecture for smart healthcare systems. IEEE Internet Things J. 2015, 2, 515–526. [Google Scholar] [CrossRef]
- Masek, P.; Masek, J.; Frantik, P.; Fujdiak, R.; Ometov, A.; Hosek, J.; Andreev, S.; Mlynek, P.; Misurec, J. A harmonized perspective on transportation management in smart cities: The novel IoT-driven environment for road traffic modeling. Sensors 2016, 16, 1872. [Google Scholar] [CrossRef] [PubMed]
- Tu, M. An exploratory study of Internet of Things (IoT) adoption intention in logistics and supply chain management. Int. J. Logist. Manag. 2018, 29, 131–151. [Google Scholar] [CrossRef]
- Idrees, Z.; Zou, Z.; Zheng, L. Edge computing based IoT architecture for low cost air pollution monitoring systems: A comprehensive system analysis, design considerations & development. Sensors 2018, 18, 3021. [Google Scholar]
- Yang, Q.; Yoo, S.J. Optimal UAV path planning: Sensing data acquisition over IoT sensor networks using multi-objective bio-inspired algorithms. IEEE Access 2018, 6, 13671–13684. [Google Scholar] [CrossRef]
- Li, Z.; Liu, G.; Liu, L.; Lai, X.; Xu, G. IoT-based tracking and tracing platform for prepackaged food supply chain. Ind. Manag. Data Syst. 2017, 117, 1906–1916. [Google Scholar] [CrossRef]
- Ji, Z.; Ganchev, I.; O’Droma, M.; Zhao, L.; Zhang, X. A cloud-based car parking middleware for IoT-based smart cities: Design and implementation. Sensors 2014, 14, 22372–22393. [Google Scholar] [CrossRef]
- Kragh, M.F.; Christiansen, P.; Laursen, M.S.; Larsen, M.; Steen, K.A.; Green, O.; Karstoft, H.; Jørgensen, R.N. Fieldsafe: Dataset for obstacle detection in agriculture. Sensors 2017, 17, 2579. [Google Scholar] [CrossRef] [Green Version]
- Camas-Nafate, M.P.; Alvarez-Gutiérrez, P.; Valenzuela-Mondaca, E.; Castillo-Palomera, R.; Perez-Luna, Y.D.C. Improved agricultural products drying through a novel double collector solar device. Sustainability 2019, 11, 2920. [Google Scholar] [CrossRef] [Green Version]
- Idbella, M.; Iadaresta, M.; Gagliarde, G.; Mennella, A.; Mazzoleni, S.; Bonanomi, G. AgriLogger: A New Wireless Sensor for Monitoring Agrometeorological Data in Areas Lacking Communication Networks. Sensors 2020, 20, 1589. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jiang, G.; Grafton, M.; Pearson, D.; Bretherton, M.; Holmes, A. Integration of Precision Farming Data and Spatial Statistical Modelling to Interpret Field-Scale Maize Productivity. Agriculture 2019, 9, 237. [Google Scholar] [CrossRef] [Green Version]
- Germani, L.; Mecarelli, V.; Baruffa, G.; Rugini, L.; Frescura, F. An IoT Architecture for Continuous Livestock Monitoring Using LoRa LPWAN. Electronics 2019, 8, 1435. [Google Scholar] [CrossRef] [Green Version]
- Maroto-Molina, F.; Navarro-García, J.; Príncipe-Aguirre, K.; Gómez-Maqueda, I.; Guerrero-Ginel, J.E.; Garrido-Varo, A.; Pérez-Marín, D.C. A low-cost iot-based system to monitor the location of a whole herd. Sensors 2019, 19, 2298. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Kim, J.; Lee, Y. The Platform Development of a Real-Time Momentum Data Collection System for Livestock in Wide Grazing Land. Electronics 2018, 7, 71. [Google Scholar] [CrossRef] [Green Version]
- Available online: https://en.wikipedia.org/wiki/Raspberry_Pi (accessed on 18 May 2020).
- Mesas-Carrascosa, F.J.; Santano, D.V.; Meroño, J.E.; De La Orden, M.S.; García-Ferrer, A. Open source hardware to monitor environmental parameters in precision agriculture. Biosyst. Eng. 2015, 137, 73–83. [Google Scholar] [CrossRef]
- Patil, A.; Beldar, M.; Naik, A.; Deshpande, S. Smart farming using Arduino and data mining. In Proceedings of the 2016 3rd International Conference on Computing for Sustainable Global Development (INDIACom), New Delhi, India, 16–18 March 2016; pp. 1913–1917. [Google Scholar]
- Rahman, S. Use of closed loop system using arduino for different parameters in farming. Bull. Electr. Eng. Inform. 2020, 9, 1373–1378. [Google Scholar]
- Jayaraman, P.P.; Yavari, A.; Georgakopoulos, D.; Morshed, A.; Zaslavsky, A. Internet of things platform for smart farming: Experiences and lessons learnt. Sensors 2016, 16, 1884. [Google Scholar] [CrossRef]
- Saqib, M.; Almohamad, T.A.; Mehmood, R.M. A Low-Cost Information Monitoring System for Smart Farming Applications. Sensors 2020, 20, 2367. [Google Scholar] [CrossRef] [Green Version]
- Trilles, S.; González-Pérez, A.; Huerta, J. A Comprehensive IoT Node Proposal Using Open Hardware, A Smart Farming Use Case to Monitor Vineyards. Electronics 2018, 7, 419. [Google Scholar] [CrossRef] [Green Version]
- Tzounis, A.; Katsoulas, N.; Bartzanas, T.; Kittas, C. Internet of Things in agriculture, recent advances and future challenges. Biosyst. Eng. 2017, 164, 31–48. [Google Scholar] [CrossRef]
- Talavera, J.M.; Tobón, L.E.; Gómez, J.A.; Culman, M.A.; Aranda, J.M.; Parra, D.T.; Quiroz, L.A.; Hoyos, A.; Garreta, L.E. Review of IoT applications in agro-industrial and environmental fields. Comput. Electron. Agric. 2017, 142, 283–297. [Google Scholar] [CrossRef]
- Zervopoulos, A.; Tsipis, A.; Alvanou, A.G.; Bezas, K.; Papamichail, A.; Vergis, S.; Stylidou, A.; Tsoumanis, G.; Komianos, V.; Koufoudakis, G.; et al. Wireless Sensor Network Synchronization for Precision Agriculture Applications. Agriculture 2020, 10, 89. [Google Scholar] [CrossRef] [Green Version]
- Cerchecci, M.; Luti, F.; Mecocci, A.; Parrino, S.; Peruzzi, G.; Pozzebon, A. A low power IoT sensor node architecture for waste management within smart cities context. Sensors 2018, 18, 1282. [Google Scholar] [CrossRef] [Green Version]
- Gia, T.N.; Sarker, V.K.; Tcarenko, I.; Rahmani, A.M.; Westerlund, T.; Liljeberg, P.; Tenhunen, H. Energy efficient wearable sensor node for IoT-based Fall detection systems. Microprocess. Microsyst. 2018, 56, 34–46. [Google Scholar]
- Zhang, Y.; Chen, Q.; Liu, G.; Shen, W.; Wang, G. Environment parameters control based on wireless sensor network in livestock buildings. Int. J. Distrib. Sens. Netw. 2016, 12, 9079748. [Google Scholar] [CrossRef] [Green Version]
- Bhargava, K.; Ivanov, S.; Donnelly, W. Internet of nano things for dairy farming. In Proceedings of the Second Annual International Conference on Nanoscale Computing and Communication, Boston, USA, 23–25 September 2015; pp. 1–2. [Google Scholar]
- Jeong, H.S.; Yoe, H. Study on the sensor MAC protocol for environment monitoring of livestock farm. In Proceedings of the International Conference on Wireless Networks (ICWN) (p. 1). The Steering Committee of the World Congress in Computer Science, Computer Engineering and Applied Computing (WorldComp), Hsinchu, Taiwan, 29 June 2012. [Google Scholar]
- Asikainen, M.; Haataja, K.; Toivanen, P. Wireless indoor tracking of livestock for behavioral analysis. In Proceedings of the 2013 IEEE 9th International Wireless Communications and Mobile Computing Conference (IWCMC), Sardinia, Italy, 1–5 July 2013; pp. 1833–1838. [Google Scholar]
- Available online: https://ec.europa.eu/growth/tools-databases/dem/monitor/content/connected-livestock (accessed on 18 May 2020).
- Vázquez-Diosdado, J.A.; Paul, V.; Ellis, K.A.; Coates, D.; Loomba, R.; Kaler, J. A combined offline and online algorithm for real-time and long-term classification of sheep behaviour: Novel approach for precision livestock farming. Sensors 2019, 19, 3201. [Google Scholar] [CrossRef] [Green Version]
- Ikhsan, M.G.; Saputro, M.Y.A.; Arji, D.A.; Harwahyu, R.; Sari, R.F. Mobile LoRa Gateway for Smart Livestock Monitoring System. In Proceedings of the 2018 IEEE International Conference on Internet of Things and Intelligence System (IOTAIS), Bali, Indonesia, 1–3 November 2018; pp. 46–51. [Google Scholar]
- Moritz, M.; Galehouse, Z.; Hao, Q.; Garabed, R.B. Can One Animal Represent an Entire Herd? Modeling Pastoral Mobility Using GPS/GIS Technology. Hum. Ecol. 2012, 40, 623–630. [Google Scholar] [CrossRef]
- Manning, J.; Cronin, G.; González, L.; Hall, E.; Merchant, A.; Ingram, L. The behavioural responses of beef cattle (Bos taurus) to declining pasture availability and the use of GNSS technology to determine grazing preference. Agriculture 2017, 7, 45. [Google Scholar] [CrossRef] [Green Version]
- Available online: https://www.vectronic-aerospace.com/ (accessed on 18 May 2020).
- Available online: https://www.lotek.com/ (accessed on 18 May 2020).
- Available online: https://www.holohil.com/ (accessed on 18 May 2020).
- Löttker, P.; Rummel, A.; Traube, M.; Stache, A.; Šustr, P.; Müller, J.; Heurich, M. New possibilities of observing animal behaviour from a distance using activity sensors in GPS-collars: An attempt to calibrate remotely collected activity data with direct behavioural observations in red deer Cervus elaphus. Wildl. Biol. 2009, 15, 425–434. [Google Scholar] [CrossRef] [Green Version]
- Ferrari, P.; Flammini, A.; Rinaldi, S.; Sisinni, E.; Maffei, D.; Malara, M. Impact of quality of service on cloud based industrial IoT applications with OPC UA. Electronics 2018, 7, 109. [Google Scholar] [CrossRef] [Green Version]
- Fernández-Caramés, T.M.; Fraga-Lamas, P.; Suárez-Albela, M.; Castedo, L. Reverse engineering and security evaluation of commercial tags for RFID-based IoT applications. Sensors 2017, 17, 28. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yoon-Min, H.; Gyu, K.M.; Jae-Jeung, R. Understanding Internet of Things (IoT) diffusion. Inf. Dev. 2015, 32, 969–985. [Google Scholar]
- Quintana-Suárez, M.A.; Sánchez-Rodríguez, D.; Alonso-González, I.; Alonso-Hernández, J.B. A low cost wireless acoustic sensor for ambient assisted living systems. Appl. Sci. 2017, 7, 877. [Google Scholar] [CrossRef] [Green Version]
- Chelotti, J.O.; Vanrell, S.R.; Milone, D.H.; Utsumi, S.A.; Galli, J.R.; Rufiner, H.L.; Giovanini, L.L. A real-time algorithm for acoustic monitoring of ingestive behavior of grazing cattle. Comput. Electron. Agric. 2016, 127, 64–75. [Google Scholar] [CrossRef] [Green Version]
- Milone, D.H.; Galli, J.R.; Cangiano, C.A.; Rufiner, H.L.; Laca, E.A. Automatic recognition of ingestive sounds of cattle based on hidden Markov models. Comput. Electron. Agric. 2012, 87, 51–55. [Google Scholar] [CrossRef]
- Carpentier, L.; Berckmans, D.; Youssef, A.; Berckmans, D.; van Waterschoot, T.; Johnston, D.; Ferguson, N.; Earley, B.; Fontana, I.; Tullo, E.; et al. Automatic cough detection for bovine respiratory disease in a calf house. Biosyst. Eng. 2018, 173, 45–56. [Google Scholar] [CrossRef]
- Andriamandroso, A.; Bindelle, J.; Mercatoris, B.; Lebeau, F. A review on the use of sensors to monitor cattle jaw movements and behavior when grazing. Biotechnol. Agron. SociÉTÉ Et Environ. 2016, 20, 1–14. [Google Scholar]
- Vanrell, S.R.; Chelotti, J.O.; Galli, J.R.; Utsumi, S.A.; Giovanini, L.L.; Rufiner, H.L.; Milone, D.H. A regularity-based algorithm for identifying grazing and rumination bouts from acoustic signals in grazing cattle. Comput. Electron. Agric. 2018, 151, 392–402. [Google Scholar] [CrossRef]
- Tran, H.A.M.; Ngo, H.Q.T.; Nguyen, T.P.; Nguyen, H. Design of Green Agriculture System Using Internet of Things and Image Processing Techniques. In Proceedings of the 2018 IEEE 4th International Conference on Green Technology and Sustainable Development (GTSD), Ho Chi Minh City, Vietnam, 23–24 November 2018; pp. 28–32. [Google Scholar]
- Available online: https://lastminuteengineers.com/neo6m-gps-arduino-tutorial/ (accessed on 18 May 2020).
- Available online: http://wiki.sunfounder.cc/index.php?title=Ublox_NEO-6M_GPS_Module (accessed on 18 May 2020).
- Aghenta, L.O.; Iqbal, M.T. Low-Cost, Open Source IoT-Based SCADA System Design Using Thinger, IO and ESP32 Thing. Electronics 2019, 8, 822. [Google Scholar] [CrossRef] [Green Version]
- Available online: https://github.com/espressif/arduino-esp32/issues/544 (accessed on 18 May 2020).
- Available online: http://wiki.friendlyarm.com/wiki/index.php/Matrix_-_Temperature_and_Humidity_Sensor (accessed on 18 May 2020).
- Available online: http://wiki.sunfounder.cc/index.php?title=MPU6050_Module (accessed on 18 May 2020).
- Available online: https://www.maximintegrated.com/en/products/analog/audio/MAX4466.html (accessed on 18 May 2020).
- Available online: https://en.wikipedia.org/wiki/Firebase (accessed on 18 May 2020).
- Available online: https://en.wikipedia.org/wiki/Arduino (accessed on 18 May 2020).
- Available online: https://en.wikipedia.org/wiki/Android_Studio (accessed on 18 May 2020).
- Ngo, H.Q.T.; Nguyen, T.P.; Huynh, V.N.S.; Le, T.S.; Nguyen, C.T. Experimental comparison of complementary filter and kalman filter design for low-cost sensor in quadcopter. In Proceedings of the 2017 IEEE International Conference on System Science and Engineering (ICSSE), Ho Chi Minh City, Vietnam, 21–23 July 2017; pp. 488–493. [Google Scholar]
- Krop-Benesch, A.; Berger, A.; Hofer, H.; Heurich, M. Long-term measurement of roe deer (Capreolus capreolus) (Mammalia: Cervidae) activity using two-axis accelerometers in GPS-collars. Ital. J. Zool. 2013, 80, 69–81. [Google Scholar] [CrossRef] [Green Version]
- Available online: https://tinyurl.com/rbfha3b (accessed on 18 May 2020).





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Description | Current in Active Mode (mA) | Current in Stand-by Mode (mA) |
|---|---|---|---|
| 1 | ESP32 | 240 | 0.8 |
| 2 | GPS NEO-6M | 50 | 30 |
| 3 | MPU-6050 (Gyros) | 3.6 | 0.005 |
| 4 | MPU-6050 (Accelerator) | 0.5 | 0.06 |
| 5 | DHT11 | 0.3 | 0.06 |
| 6 | GY-MAX4466 | 0.06 | 0.05 (uA) |
| No. | Item | Cost (unit: USD) |
|---|---|---|
| 1 | ESP32 | 6.87 |
| 2 | GPS NEO-6M | 13.96 |
| 3 | MPU-6050 | 1.03 |
| 4 | DHT11 | 1.29 |
| 5 | GY-MAX4466 | 2.15 |
| 6 | Cover | 2.3 |
| 7 | Belt | 1.1 |
| Total | 28.7 | |
| Specification | VERTEX Lite | Proposed Approach |
|---|---|---|
| Weight | 320 g | 200 g |
| Battery | 1 Cell—349 days | 21 days * |
| Frequent update | Every 2 h | Every 10 s |
| Price (USD) | 1000~2000 | 28.7 |
| Tracking mode | GPS | GPS |
| Max records | 130.000 positions | Depends on Firebase |
| Data transmission | Iridium/Globalstar/Global System for Mobile Communications | Transmission Control Protocol/ Internet Protocol |
| Motion sensor | Yes | Yes |
| Axis | 3 | 6 |
| Temperature sensor | Yes | Yes |
| Mortality sensor | Yes | No |
| Radio beacon | VHF | No |
| Microphone | No | Yes |
| Acoustic analysis | No | Yes |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ngo, H.Q.T.; Nguyen, T.P.; Nguyen, H. Research on a Low-Cost, Open-Source, and Remote Monitoring Data Collector to Predict Livestock’s Habits Based on Location and Auditory Information: A Case Study from Vietnam. Agriculture 2020, 10, 180. https://doi.org/10.3390/agriculture10050180
Ngo HQT, Nguyen TP, Nguyen H. Research on a Low-Cost, Open-Source, and Remote Monitoring Data Collector to Predict Livestock’s Habits Based on Location and Auditory Information: A Case Study from Vietnam. Agriculture. 2020; 10(5):180. https://doi.org/10.3390/agriculture10050180
Chicago/Turabian StyleNgo, Ha Quang Thinh, Thanh Phuong Nguyen, and Hung Nguyen. 2020. "Research on a Low-Cost, Open-Source, and Remote Monitoring Data Collector to Predict Livestock’s Habits Based on Location and Auditory Information: A Case Study from Vietnam" Agriculture 10, no. 5: 180. https://doi.org/10.3390/agriculture10050180