Biologically-Inspired Learning and Adaptation of Self-Evolving Control for Networked Mobile Robots


Abstract
:1. Introduction
2. Biologically-Inspired Kalman Filter Based RBFNN Control
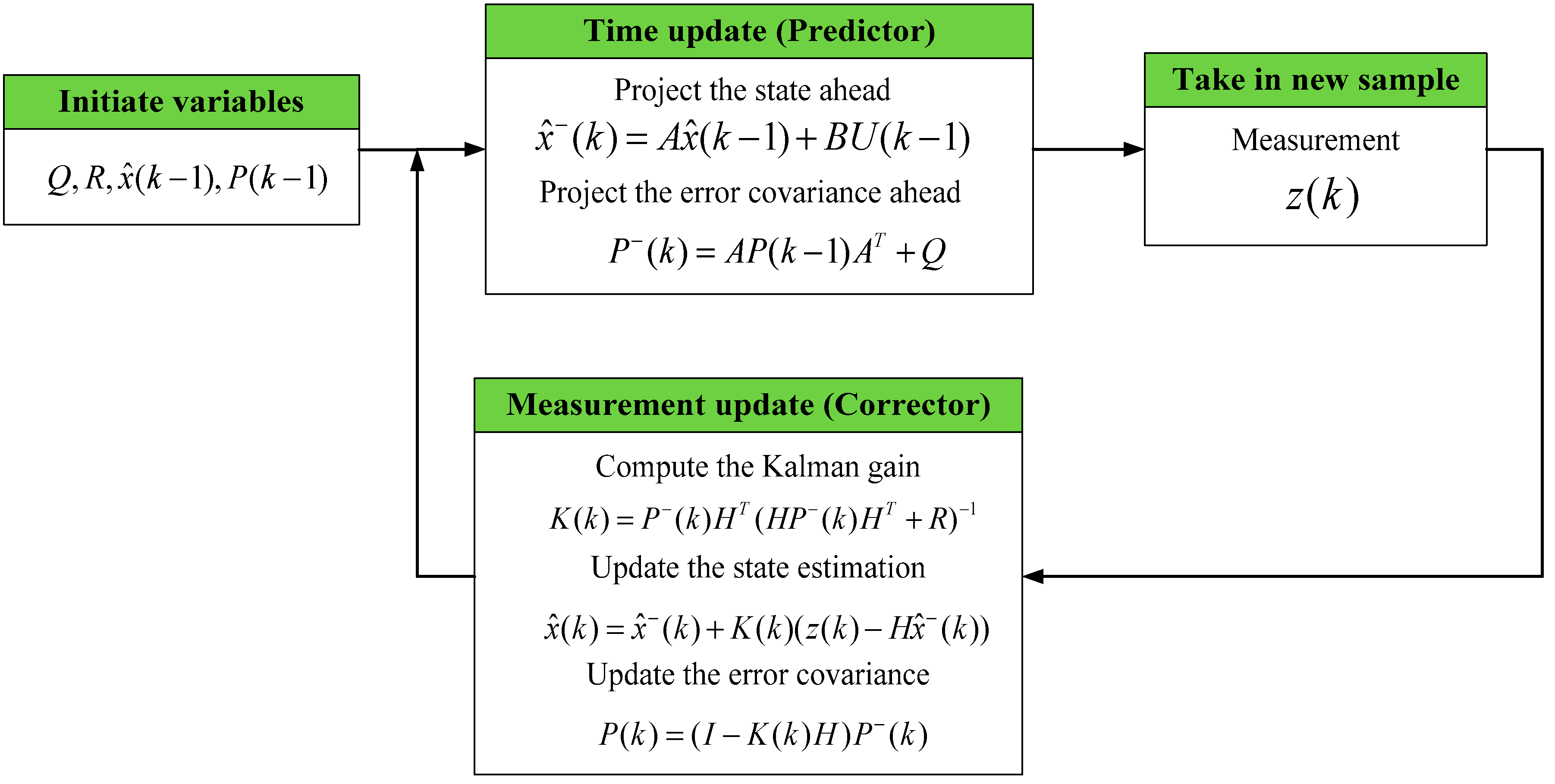
2.1. Kalman Filter Algorithm
- Time update phase:
- At time step k − 1, calculate and .
- Update the estimation of state vector and the estimation of error covariance matrix .
- Measurement update phase:
- Update the optimal gain K(k) of Kalman filter.
- Update the estimation of state vector using , and K(k).
- Update the estimation of error covariance matrix p(k) by utilizing K(k) and for next iteration in the Kalman filter algorithm process.
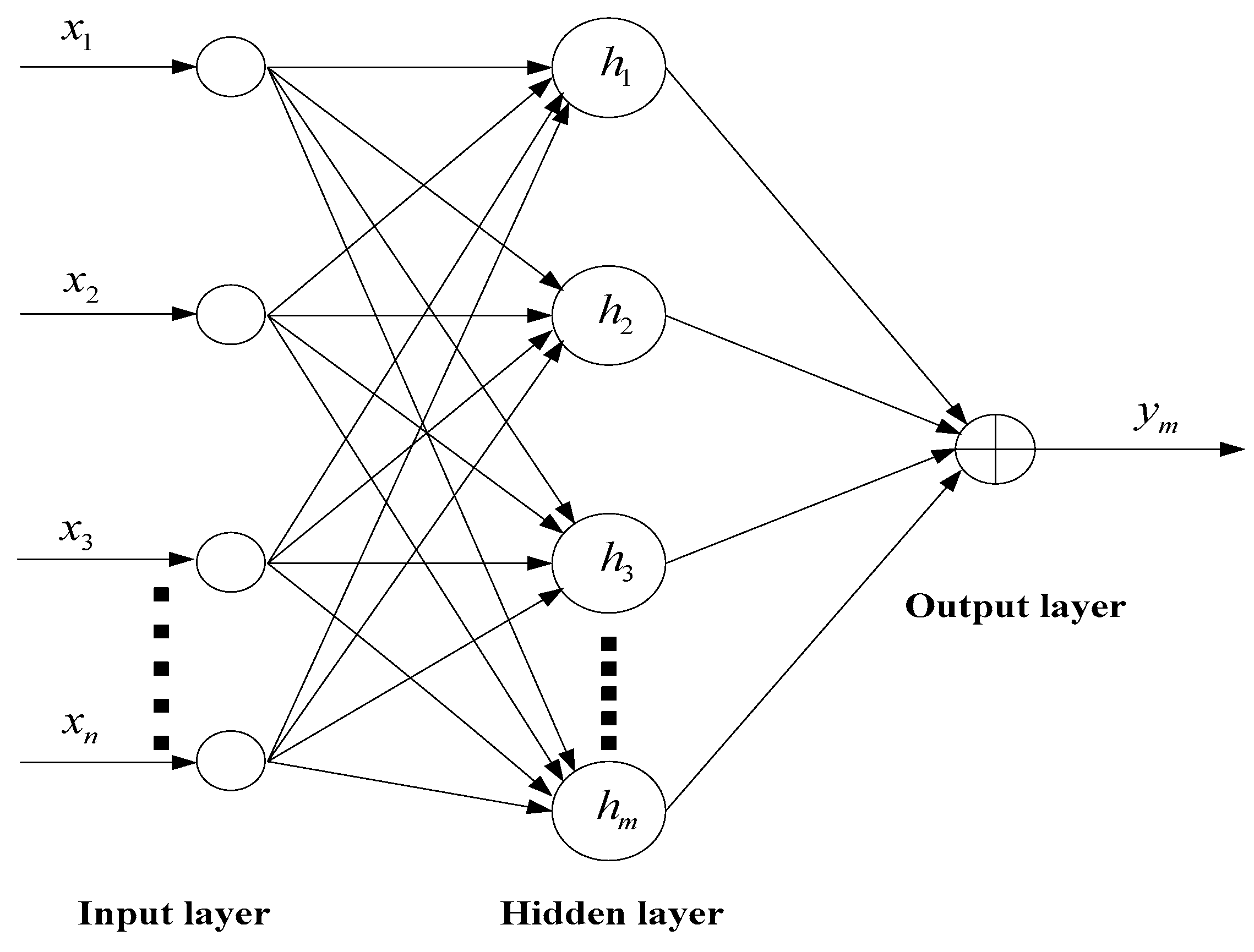
2.2. Classical RBFNN
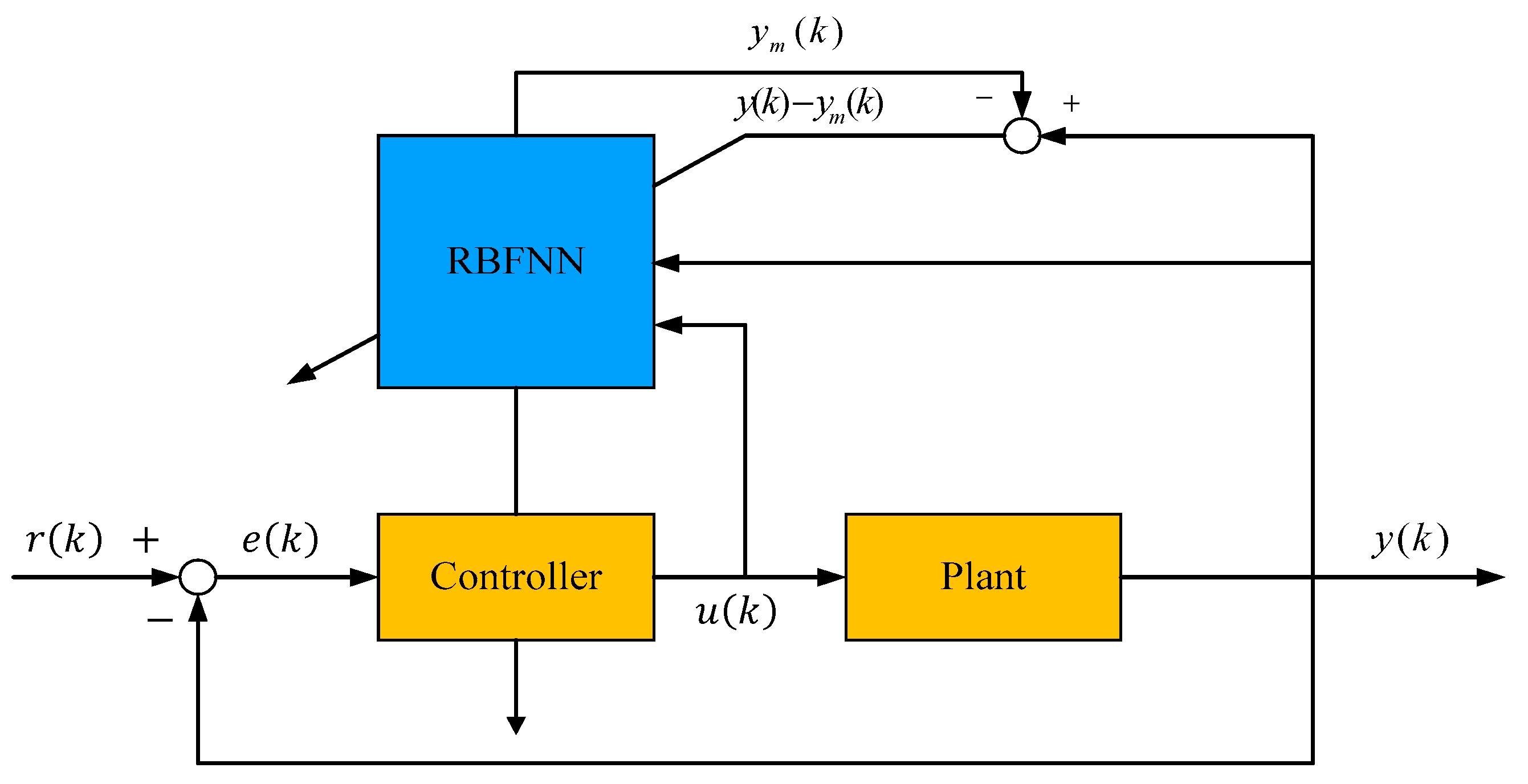
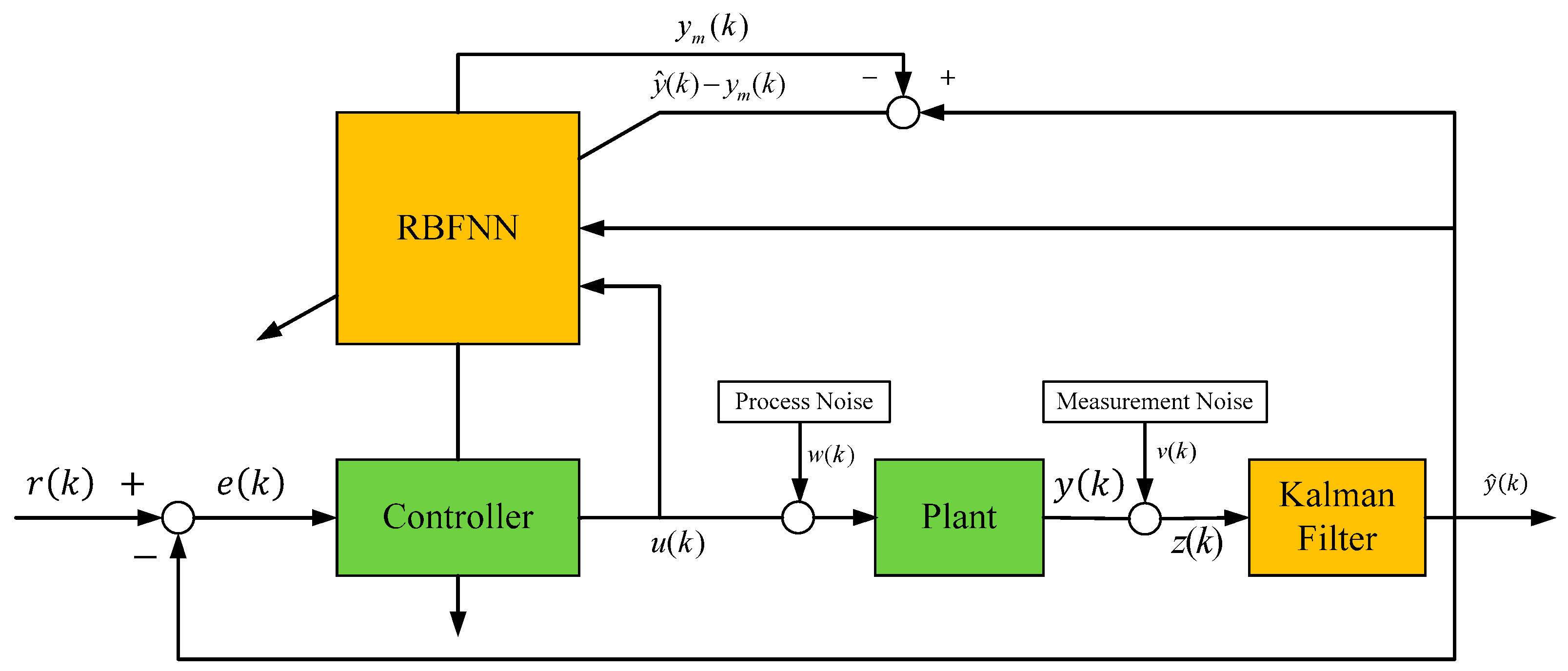
2.3. Kalman Filter Based RBFNN Control
2.4. Evolutionary KF-RBFNN Control
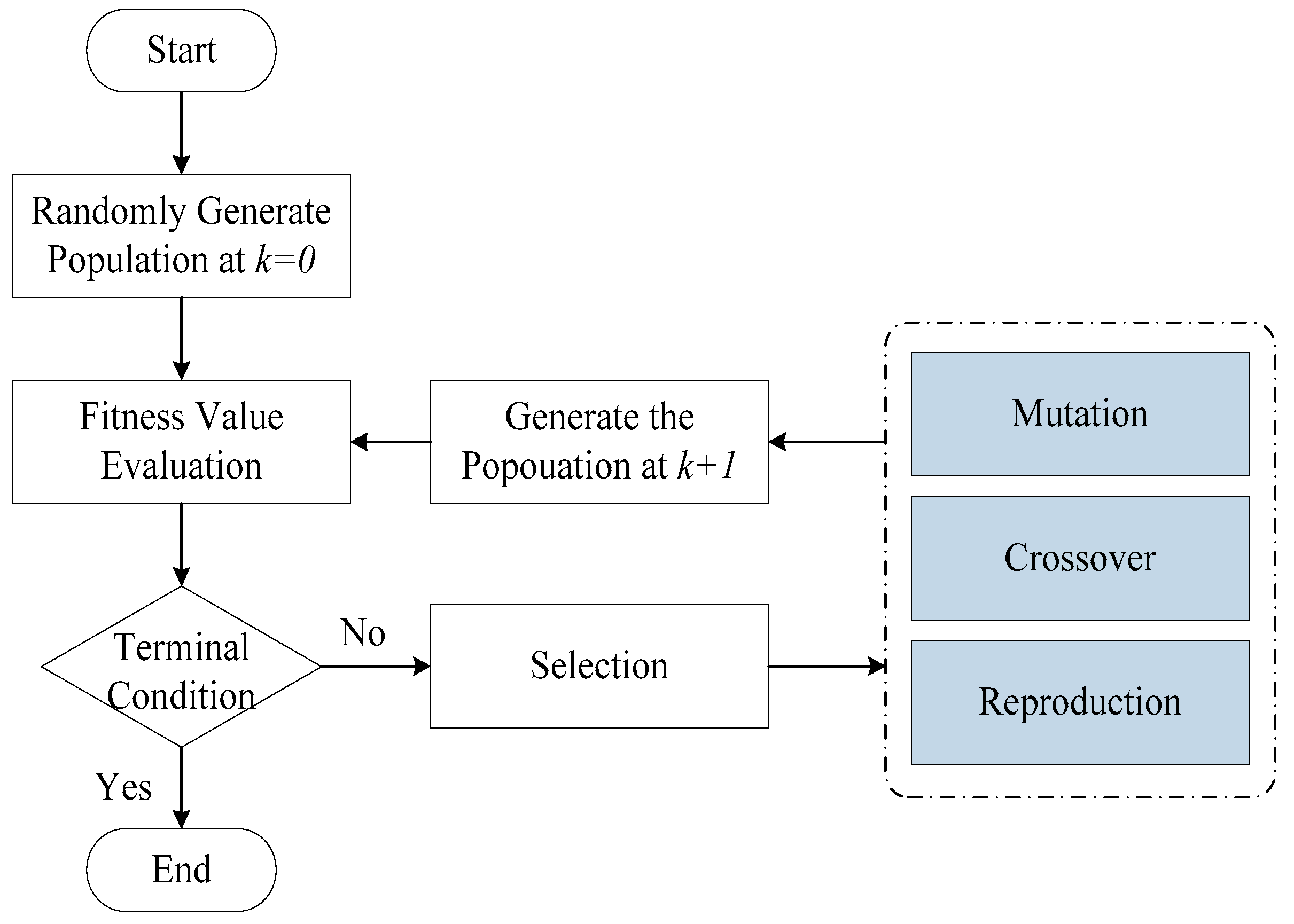
2.4.1. Modified GA with Lévy Flight
2.4.2. GA-Based KF-RBFNN
- Step 1:
- Initialize the GA computing with Lévy flight.
- Step 2:
- Each GA chromosome in the population contains genes to represent the KF-RBFNN parameters, meaning that .
- Step 3:
- Construct the KF-RBFNN using and evaluate the performance using the fitness function (11).
- Step 4:
- Perform GA crossover and mutation with the probabilities set by Lévy flight.
- Step 5:
- Update the GA population.
- Step 6:
- Check the termination criterion. Go to Step 3 or output the optimized GA individual for the proposed GA-KF-RBFNN.
3. Application to Self-Evolving Control of Networked Mobile Robots
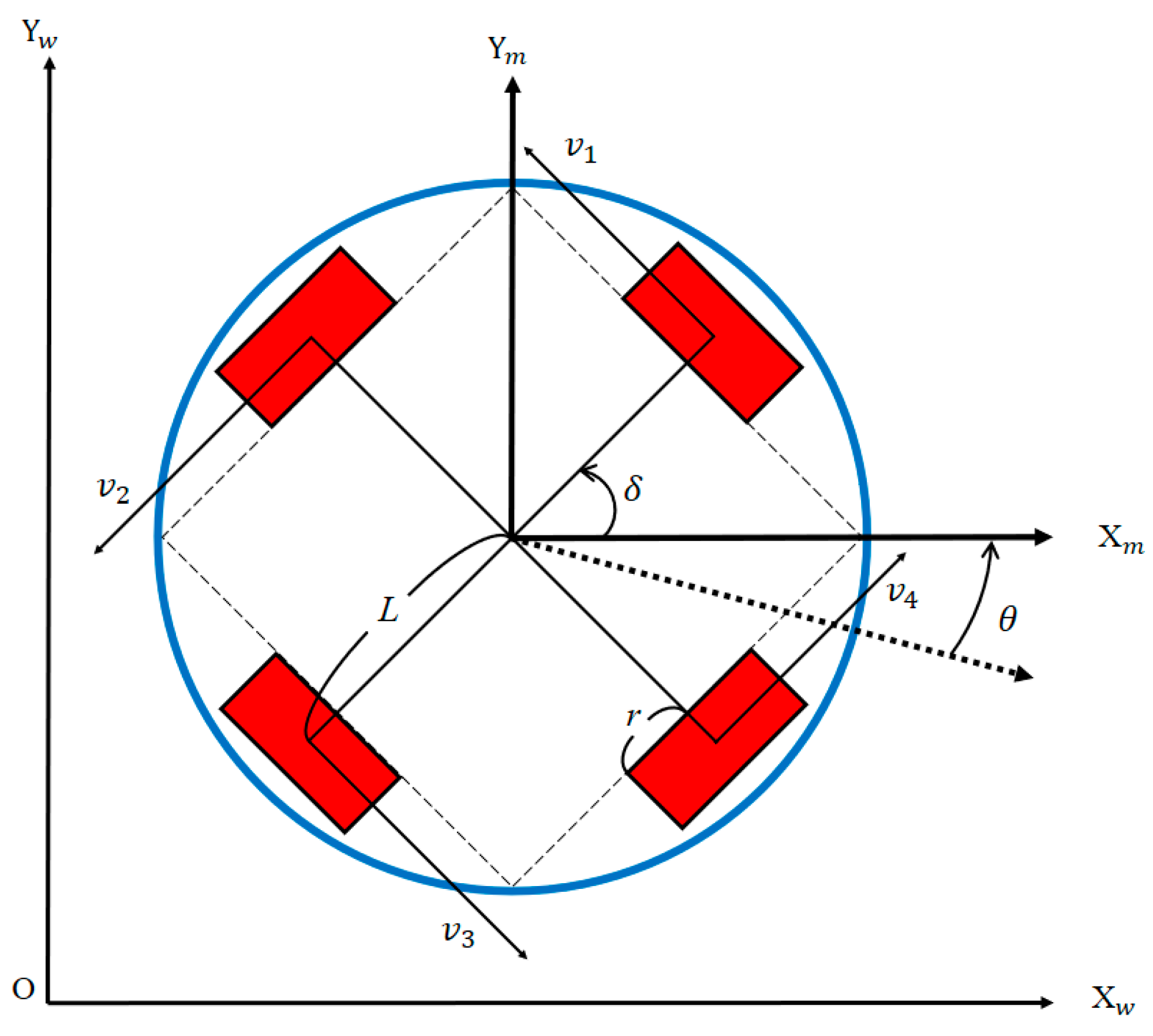
3.1. Modeling and Lyapunov-Based Control
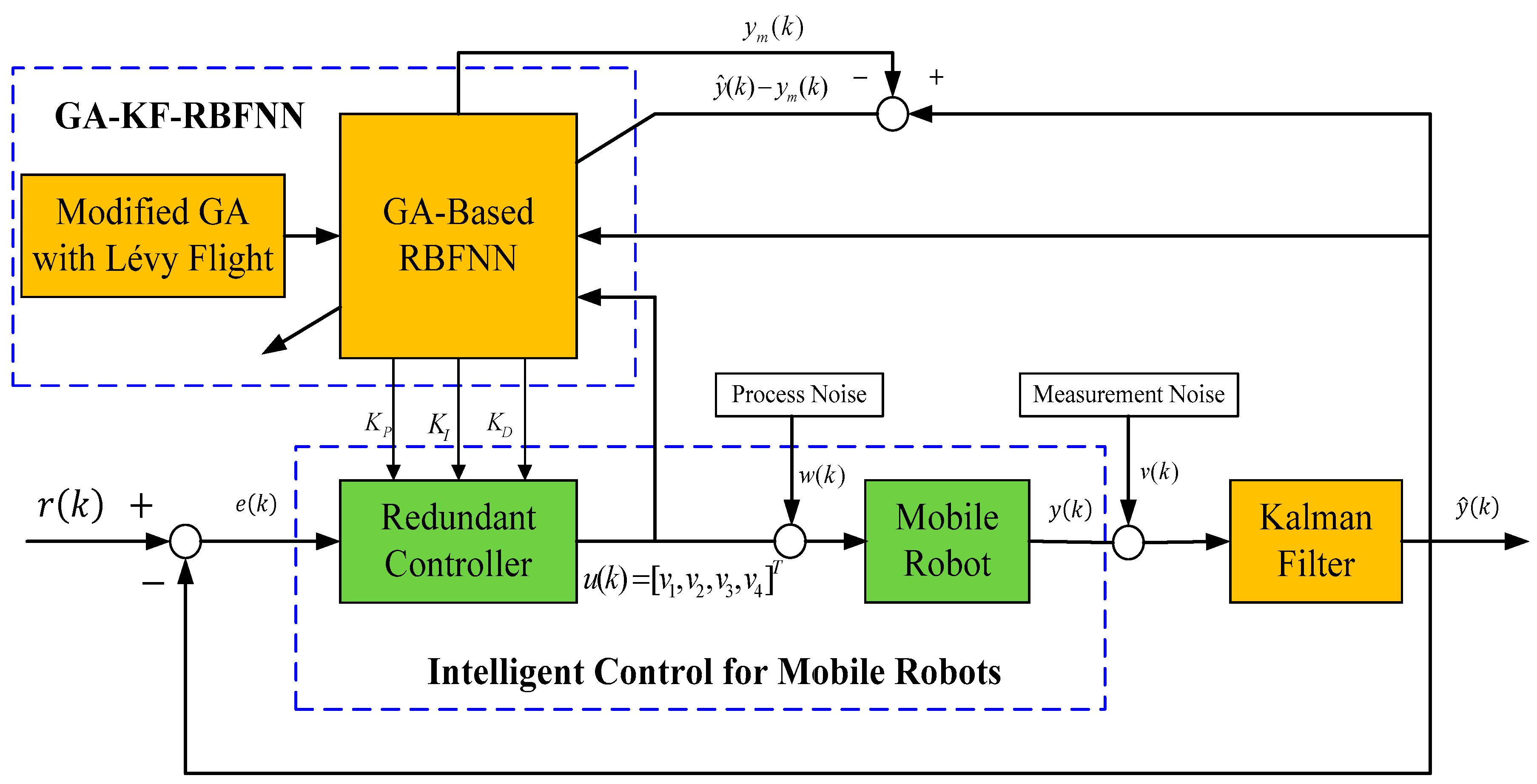
3.2. GA-KF-RBFNN Self-Learning Control
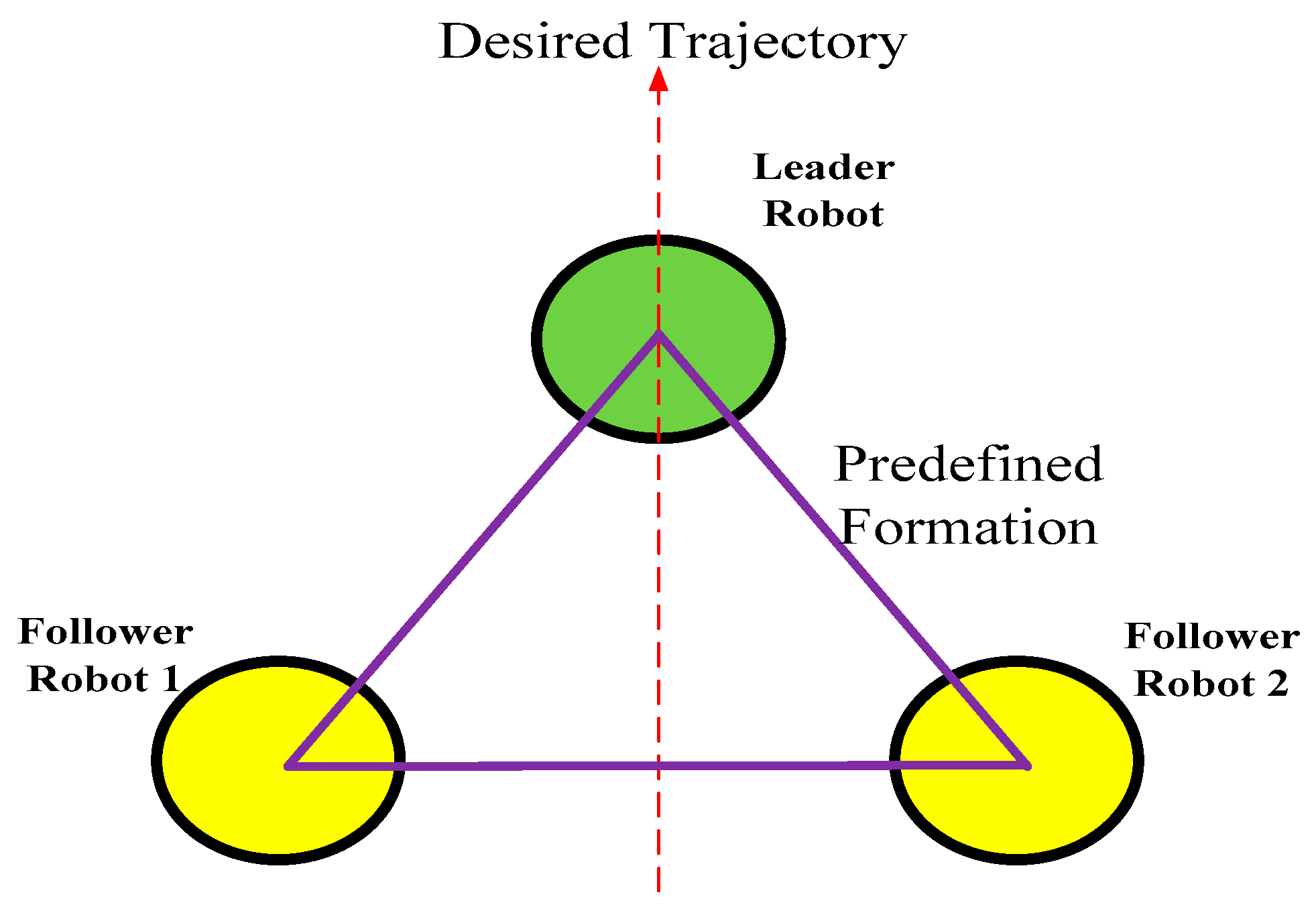
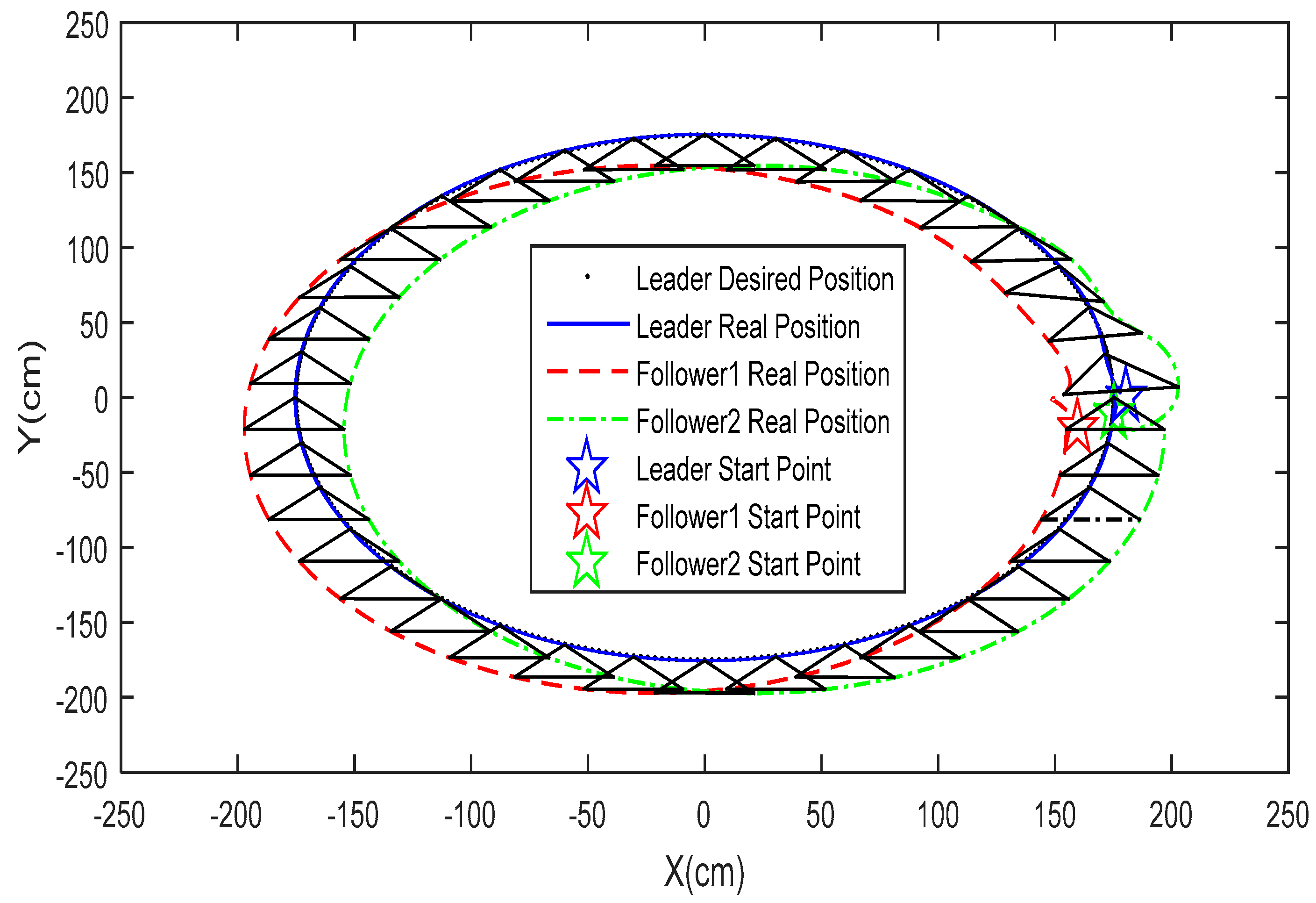
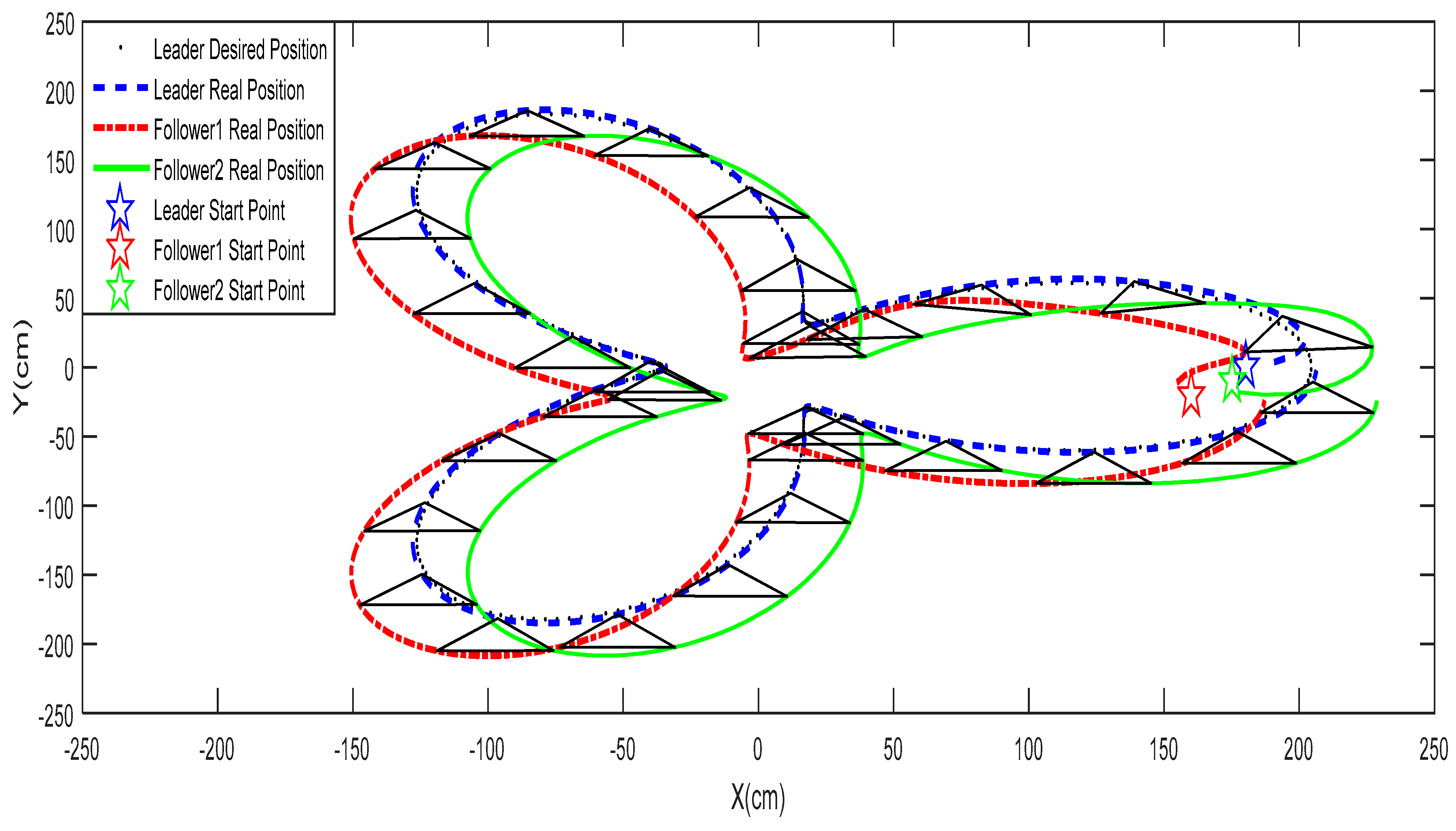
3.3. Leader-Follower Formation Control of Networked Mobile Robots
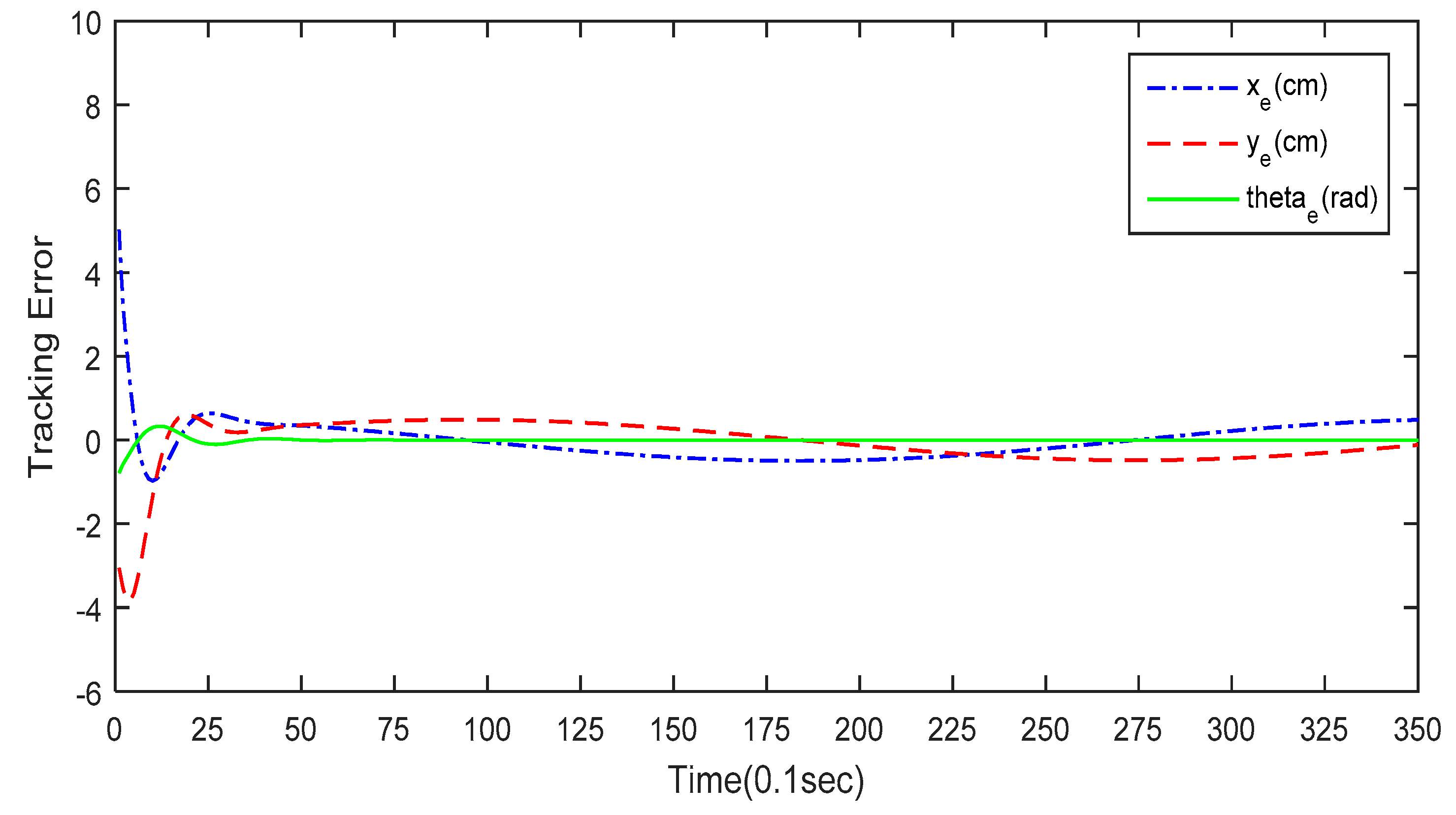
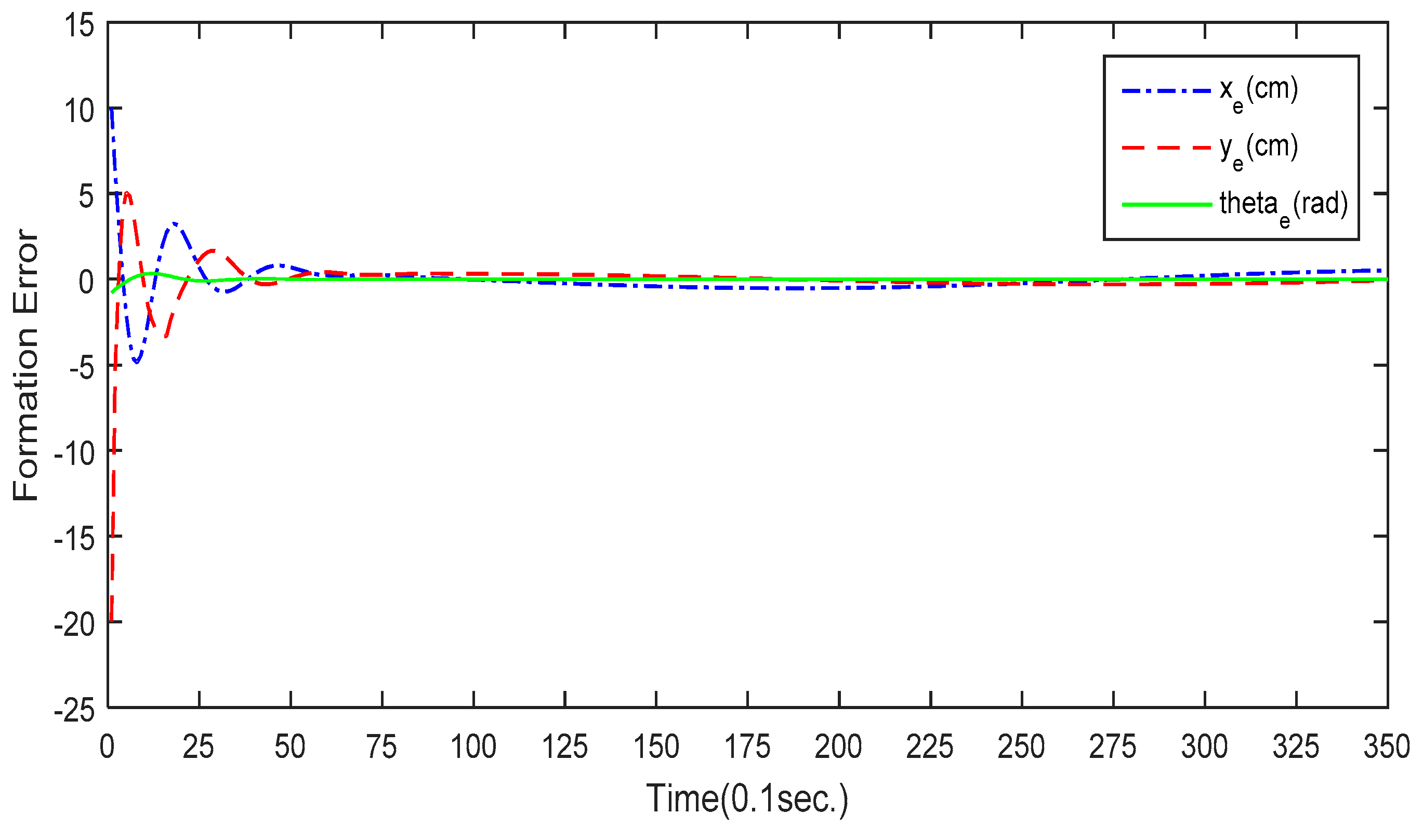
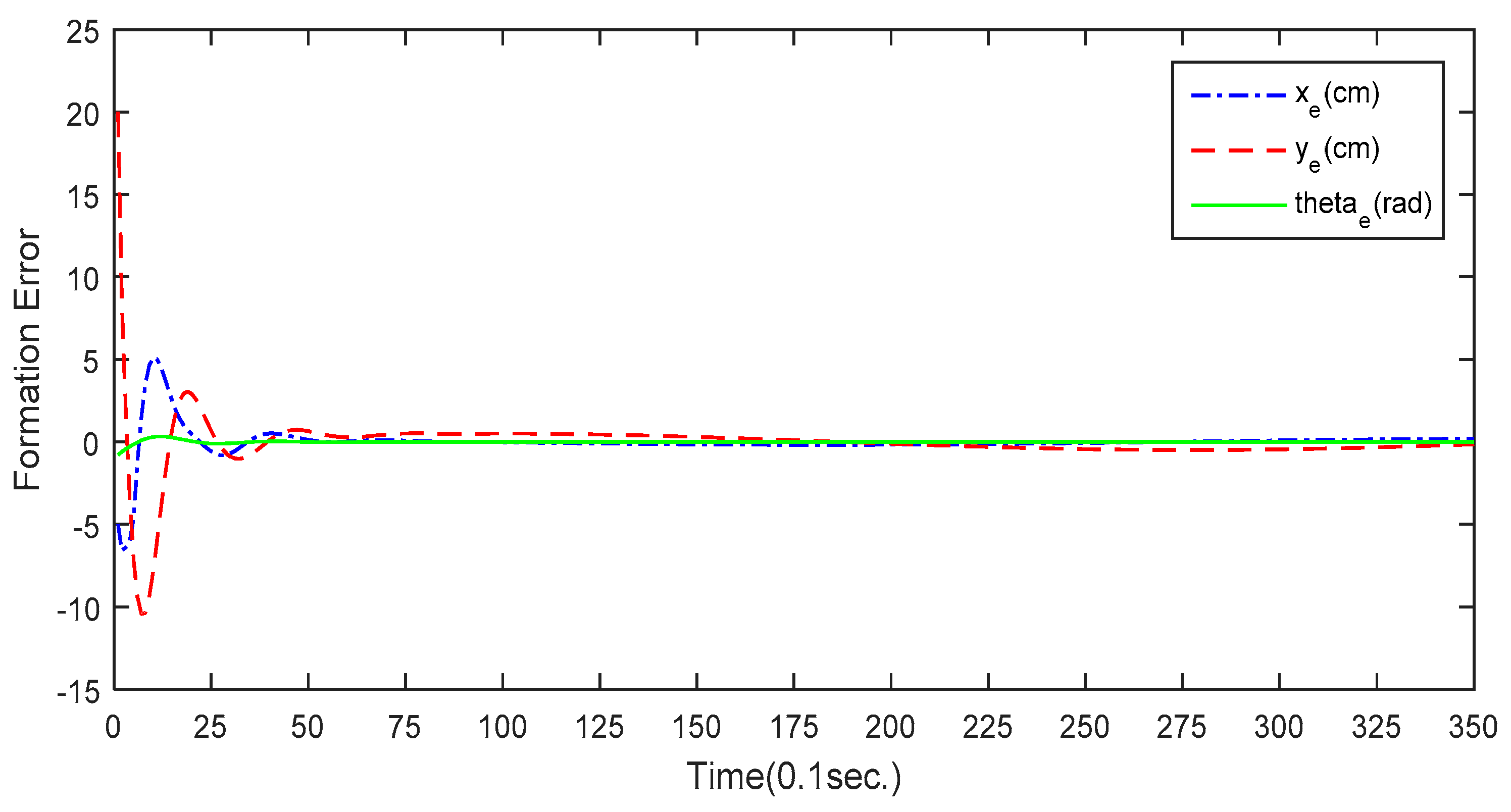
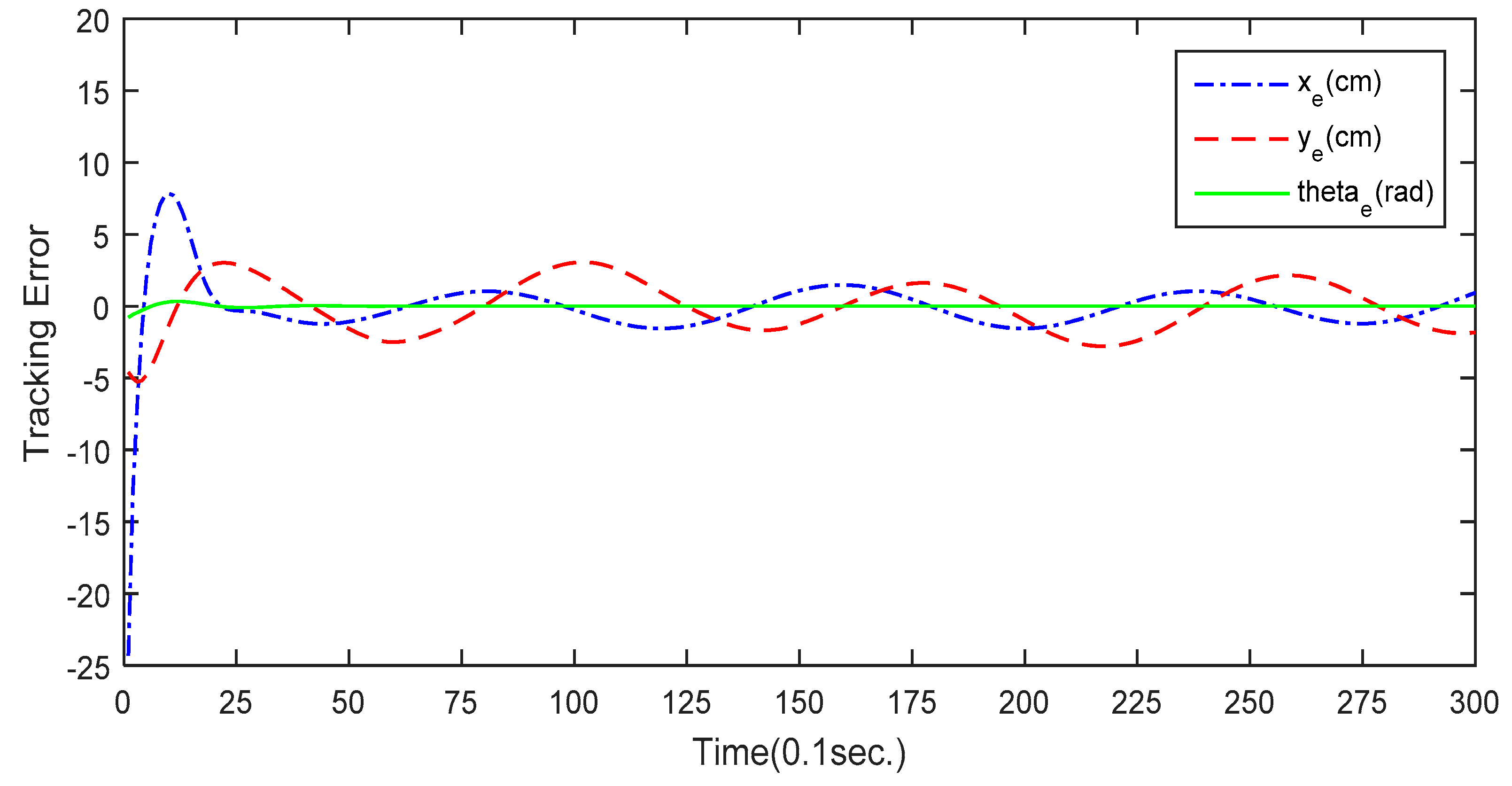
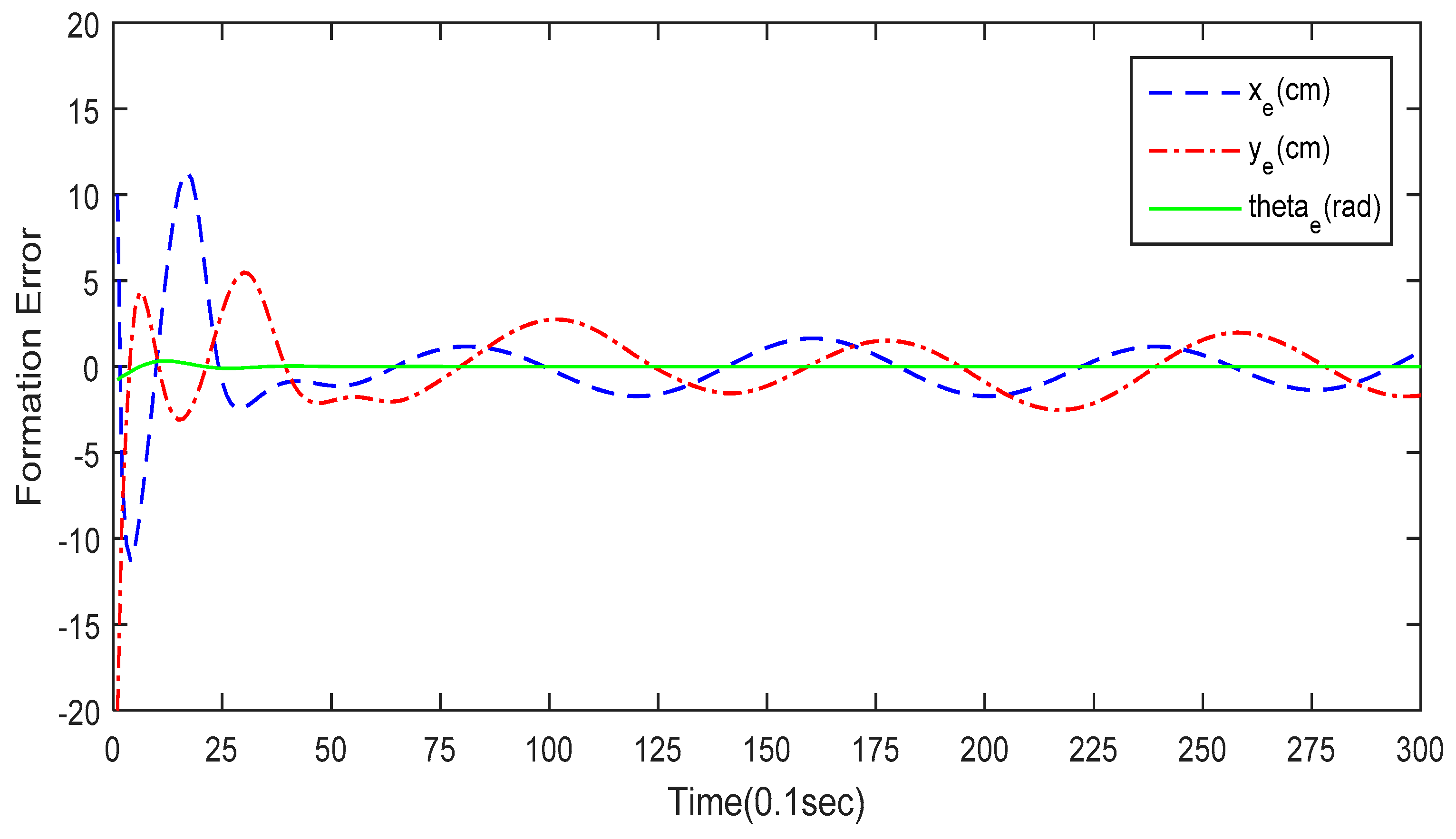
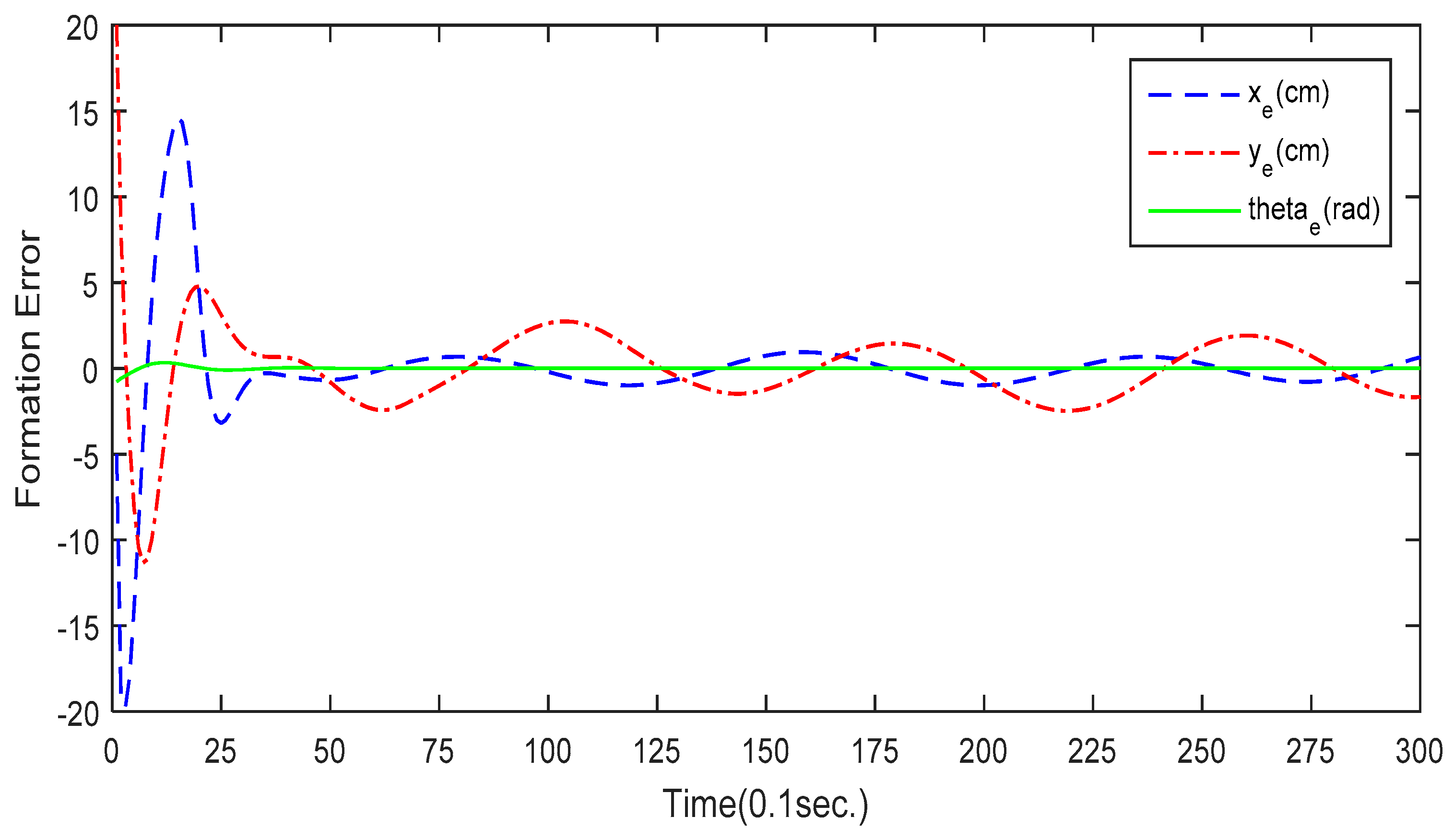
4. Simulations, Comparative Analysis, and Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Liu, Y.; Gao, J.; Shi, X.; Jiang, C. Decentralization of virtual linkage in formation control of multi-agents via consensus strategies. Appl. Sci. 2018, 8, 2020. [Google Scholar] [CrossRef]
- Keviczky, T.; Borrelli, F.; Fregene, K.; Godbole, D.; Balas, G. Decentralized receding horizon control and coordination of autonomous vehicle formations. IEEE Trans. Control Syst. Technol. 2008, 16, 19–33. [Google Scholar] [CrossRef]
- Qian, D.; Xi, Y. Leader-follower formation maneuvers for multi-robot systems via derivative and integral terminal sliding mode. Appl. Sci. 2018, 8, 1045. [Google Scholar] [CrossRef]
- Qu, Z.; Wang, J.; Hull, R.A.; Martin, J. Cooperative control design and stability analysis for multi-agent systems with communication delays. In Proceedings of the 2006 IEEE International Conference of Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 970–975. [Google Scholar]
- Kantaros, Y.; Zavlanos, M.M. Global planning for multi-robot communication networks in complex environments. IEEE Trans. Robot. 2016, 32, 1045–1061. [Google Scholar] [CrossRef]
- Pan, L.; Lu, Q.; Yin, K.; Zhang, B. Signal source localization of multiple robots using an event-triggered communication scheme. Appl. Sci. 2018, 8, 977. [Google Scholar] [CrossRef]
- Ferrari-Trecate, G.; Galbusera, L.; Marciandi, M.P.E.; Scattolini, R. Model predictive control schemes for consensus in multi-agent systems with single and double integrator dynamics. IEEE Trans. Autom. Control 2009, 54, 2560–2572. [Google Scholar] [CrossRef]
- Dong, F.; Lei, X.; Chou, W. The adaptive radial basis function neural network for small rotary-wing unmanned aircraft. IEEE Trans. Ind. Electron. 2014, 61, 4808–4815. [Google Scholar]
- Yang, C.; Li, Z.; Cui, R.; Xu, B. Neural network-based motion control of an underactuated wheeled inverted pendulum model. IEEE Trans. Neural Netw. Learn. Syst. 2014, 25, 2004–2016. [Google Scholar] [CrossRef] [PubMed]
- Khosravi, H. A novel structure for radial basis function networks-WRBF. Neural Process. Lett. 2012, 35, 177–186. [Google Scholar] [CrossRef]
- Dash, C.S.K.; Dash, A.P.; Cho, S.B.; Wang, G.N. DE+RBFNs based classification: A special attention to removal of inconsistency and irrelevant features. Eng. Appl. Artif. Intell. 2013, 26, 2315–2326. [Google Scholar] [CrossRef]
- Chang, G.W.; Chen, C.I.; Teng, Y.F. Radial-basis-function-based neural network for harmonic detection. IEEE Trans. Ind. Electron. 2010, 57, 2171–2179. [Google Scholar] [CrossRef]
- Tong, C.C.; Ooi, E.T.; Liu, J.C. Design a RBF neural network auto-tuning controller for magnetic levitation system with Kalman filter. In Proceedings of the 2015 IEEE/SICE International Symposium on System Integration (SII), Nagoya, Japan, 11–13 December 2015; pp. 528–533. [Google Scholar]
- Hamid, K.R.; Talukder, A.; Islam, A.K. Implementation of fuzzy aided Kalman filter for tracking a moving object in two-dimensional space. Int. J. Fuzzy Log. Intell. Syst. 2018, 18, 85–96. [Google Scholar] [CrossRef]
- Ko, N.Y.; Jeong, S.; Bae, Y. Sine rotation vector method for attitude estimation of an underwater robot. Sensors 2013, 16, 1213. [Google Scholar] [CrossRef]
- Lu, X.; Wang, L.; Wang, H.; Wang, X. Kalman filtering for delayed singular systems with multiplicative noise. IEEE/CAA J. Autom. Sin. 2016, 3, 51–58. [Google Scholar]
- Wang, S.; Feng, J.; Tse, C. Analysis of the characteristic of the Kalman gain for 1-D chaotic maps in cubature Kalman filter. IEEE Signal Process. Lett. 2013, 20, 229–232. [Google Scholar] [CrossRef]
- Foley, C.; Quinn, A. Fully probabilistic design for knowledge transfer in a pair of Kalman filters. IEEE Signal Process. Lett. 2018, 25, 487–490. [Google Scholar] [CrossRef]
- Xie, S.; Xie, Y.; Huang, T.; Gui, W.; Yang, C. Generalized predictive control for industrial processes based on neuron adaptive splitting and merging RBF neural network. IEEE Trans. Ind. Electron. 2019, 66, 1192–1202. [Google Scholar] [CrossRef]
- Gutiérrez, P.A.; Hervas-Martinez, C.; Martínez-Estudillo, F.J. Logistic regression by means of evolutionary radial basis function neural networks. IEEE Trans. Neural Netw. 2011, 22, 246–263. [Google Scholar] [CrossRef] [PubMed]
- Huang, F.; Zhang, W.; Chen, Z.; Tang, J.; Song, W.; Zhu, S. RBFNN-based adaptive sliding mode control design for nonlinear bilateral teleoperation system under time-varying delays. IEEE Access 2019, 7, 11905–11912. [Google Scholar] [CrossRef]
- Zao, Y.; Zheng, Z. A robust adaptive RBFNN augmenting backstepping control approach for a model-scaled helicopter. IEEE Trans. Control Syst. Technol. 2015, 23, 2344–2352. [Google Scholar]
- Tian, J.; Li, M.; Chen, F.; Feng, N. Learning subspace-based RBFNN using coevolutionary algorithm for complex classification tasks. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 47–61. [Google Scholar] [CrossRef] [PubMed]
- Chang, G.W.; Shih, M.F.; Chen, Y.Y.; Liang, Y.J. A hybrid wavelet transform and neural-network-based approach for modelling dynamic voltage-current characteristics of electric arc furnace. IEEE Trans. Power Deliv. 2014, 29, 815–824. [Google Scholar] [CrossRef]
- Zhao, Y.; Ye, H.; Kang, Z.S.; Shi, S.S.; Zhou, L. The recognition of train wheel tread damages based on PSO-RBFNN algorithm. In Proceedings of the 2012 8th International Conference on Natural Computation, Chongqing, China, 29–31 May 2012; pp. 1093–1095. [Google Scholar]
- Wei, Z.Q.; Hai, X.Z.; Jian, W. Prediction of electricity consumption based on genetic algorithm-RBF neural network. In Proceedings of the 2010 2nd International Conference on Advanced Computer Control, Shenyang, China, 27–29 March 2010; Volume 5, pp. 339–342. [Google Scholar]
- Wei, H.; Tang, X.S. A genetic-algorithm-based explicit description of object contour and its ability to facilitate recognition. IEEE Trans. Cybern. 2015, 45, 2558–2571. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.C. FPGA-based hybrid GA-PSO algorithm and its application to global path planning for mobile robots. Przeglad Elektrotechniczny 2012, 7, 281–284. [Google Scholar]
- Ding, S.F.; Xu, L.; Su, C.Y.; Jin, F.X. An optimizing method of RBF neural network based on genetic algorithm. Neural Comput. Appl. 2012, 21, 333–336. [Google Scholar] [CrossRef]
- Chou, C.J.; Chen, L.F. Combining neural networks and genetic algorithms for optimising the parameter design of the inter-metal dielectric process. Int. J. Prod. Res. 2012, 50, 1905–1916. [Google Scholar] [CrossRef]
- Marshall, J.A.; Broucke, M.E.; Francis, B.A. Formations of vehicles in cyclic pursuit. IEEE Trans. Autom. Control 2004, 49, 1963–1974. [Google Scholar] [CrossRef]
- Oh, K.K.; Park, M.C.; Ahn, H.S. A survey of multi-agent formation control. Automatica 2015, 53, 424–440. [Google Scholar] [CrossRef]
- Alonso-Mora, J.; Baker, S.; Siegwart, R. Multi-robot navigation in formation via sequential convex programming. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015. [Google Scholar]
- Lee, H.C.; Roh, B.S.; Lee, B.H. Multi-hypothesis map merging with sinogram-based PSO for multi-robot systems. Electron. Lett. 2016, 52, 1213–1214. [Google Scholar] [CrossRef]
- Tsai, C.C.; Chen, Y.S.; Tai, F.C. Intelligent adaptive distributed consensus formation control for uncertain networked heterogeneous Swedish-wheeled omnidirectional multi-robots. In Proceedings of the Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE), Tsukuba, Japan, 20–23 September 2016; pp. 154–159. [Google Scholar]
- Tiep, D.K.; Lee, K.; Im, D.Y.; Kwak, B.; Ryoo, Y.J. Design of fuzzy-PID controller for path tracking of mobile robot with differential drive. Int. J. Fuzzy Log. Intell. Syst. 2018, 18, 220–228. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Evolutionary Strategy | Noise Reduction | Distributed Formation | Leader-Follower Approach | Consensus Delayed Formation | Omnidirectional Capability | |
|---|---|---|---|---|---|---|
| [1,2] | No | No | Yes | Yes | Yes | No |
| [3,4,5,6] | No | No | Yes | Yes | Yes | No |
| [7,8,9] | No | No | Yes | Yes | Yes | No |
| [10,11,12,13] | No | No | Yes | Yes | Yes | No |
| [31,32,33,34] | No | No | Yes | Yes | Yes | No |
| This Study | Yes | Yes | Yes | Yes | No | Yes |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, S.S.-D.; Huang, H.-C.; Chiu, T.-C.; Lin, S.-K. Biologically-Inspired Learning and Adaptation of Self-Evolving Control for Networked Mobile Robots. Appl. Sci. 2019, 9, 1034. https://doi.org/10.3390/app9051034
Xu SS-D, Huang H-C, Chiu T-C, Lin S-K. Biologically-Inspired Learning and Adaptation of Self-Evolving Control for Networked Mobile Robots. Applied Sciences. 2019; 9(5):1034. https://doi.org/10.3390/app9051034
Chicago/Turabian StyleXu, Sendren Sheng-Dong, Hsu-Chih Huang, Tai-Chun Chiu, and Shao-Kang Lin. 2019. "Biologically-Inspired Learning and Adaptation of Self-Evolving Control for Networked Mobile Robots" Applied Sciences 9, no. 5: 1034. https://doi.org/10.3390/app9051034