

Modal Parameter Identification of a Structure Under Earthquake via a Wavelet-Based Subspace Approach
Abstract
:1. Introduction
2. Methodology
2.1. Equations of Motion for a Structure under Multiple Support Excitation
2.2. Stationary Wavelet Packet Transform
2.3. Formulation for Modal Parameter Identification
2.4. Procedure of Analysis
3. Numerical Verification
3.1. Time-Invariant System
3.2. Periodically Varying System
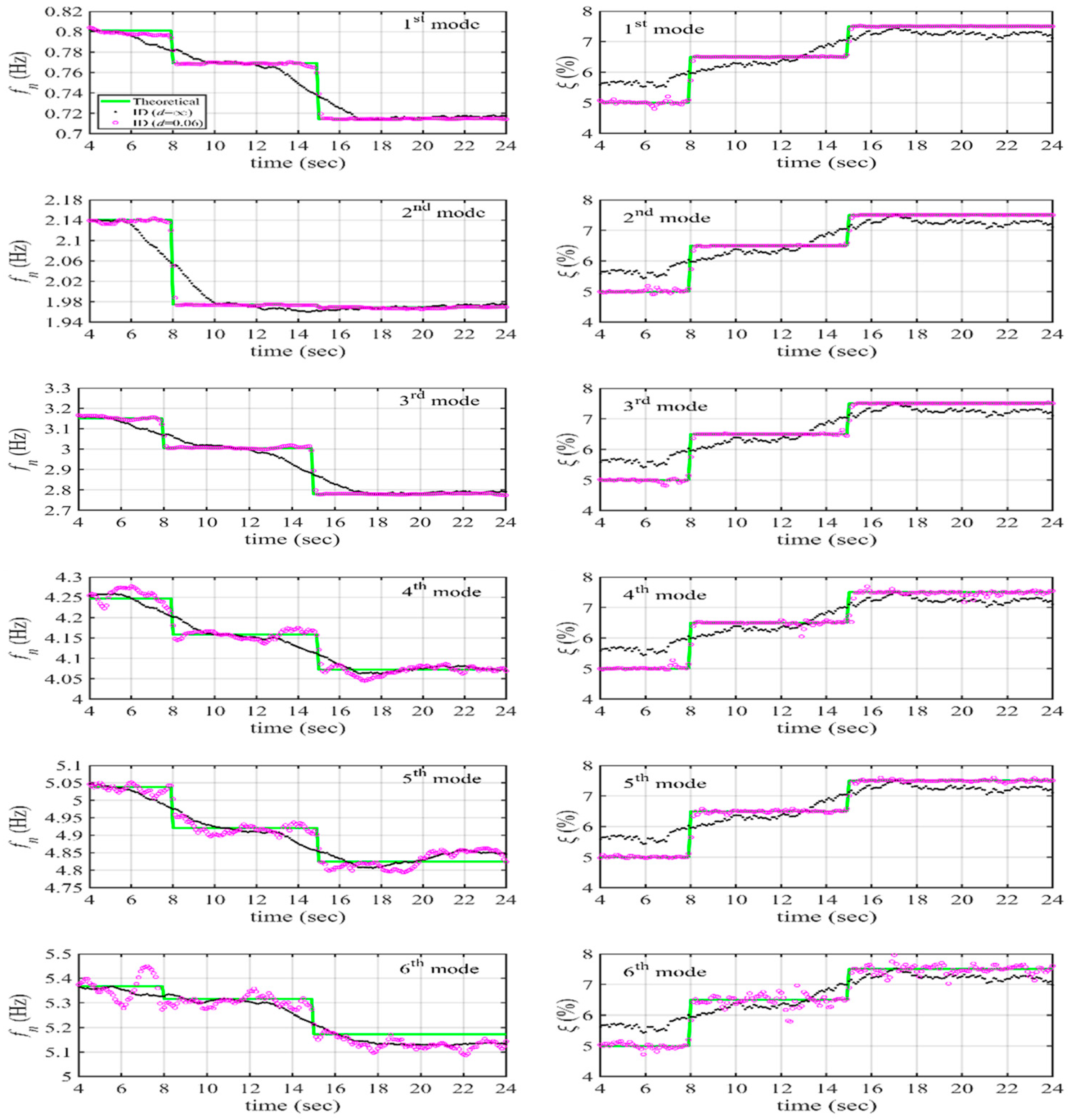
3.3. Sharply Varying System
4. Applications to Real Measured Responses
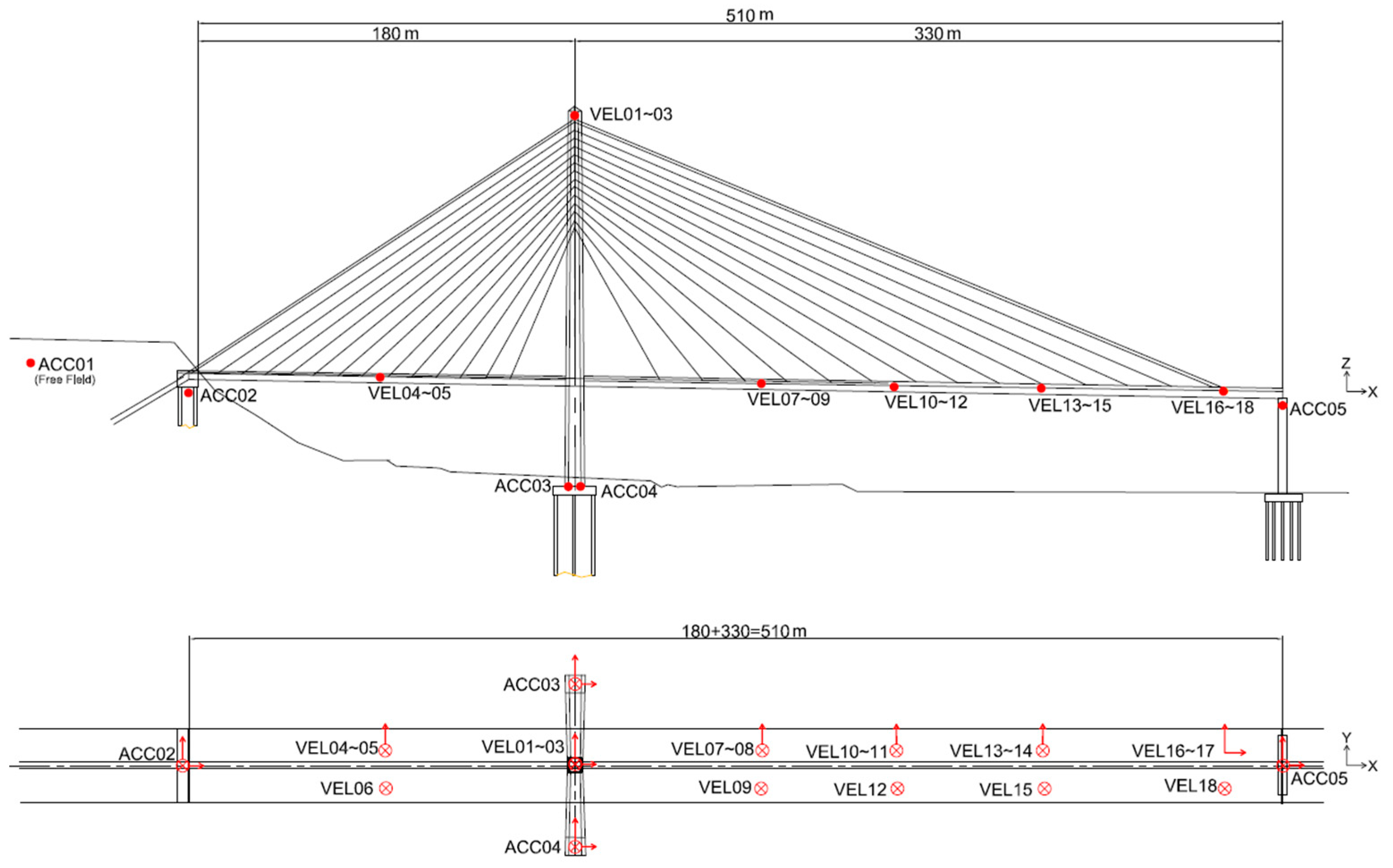
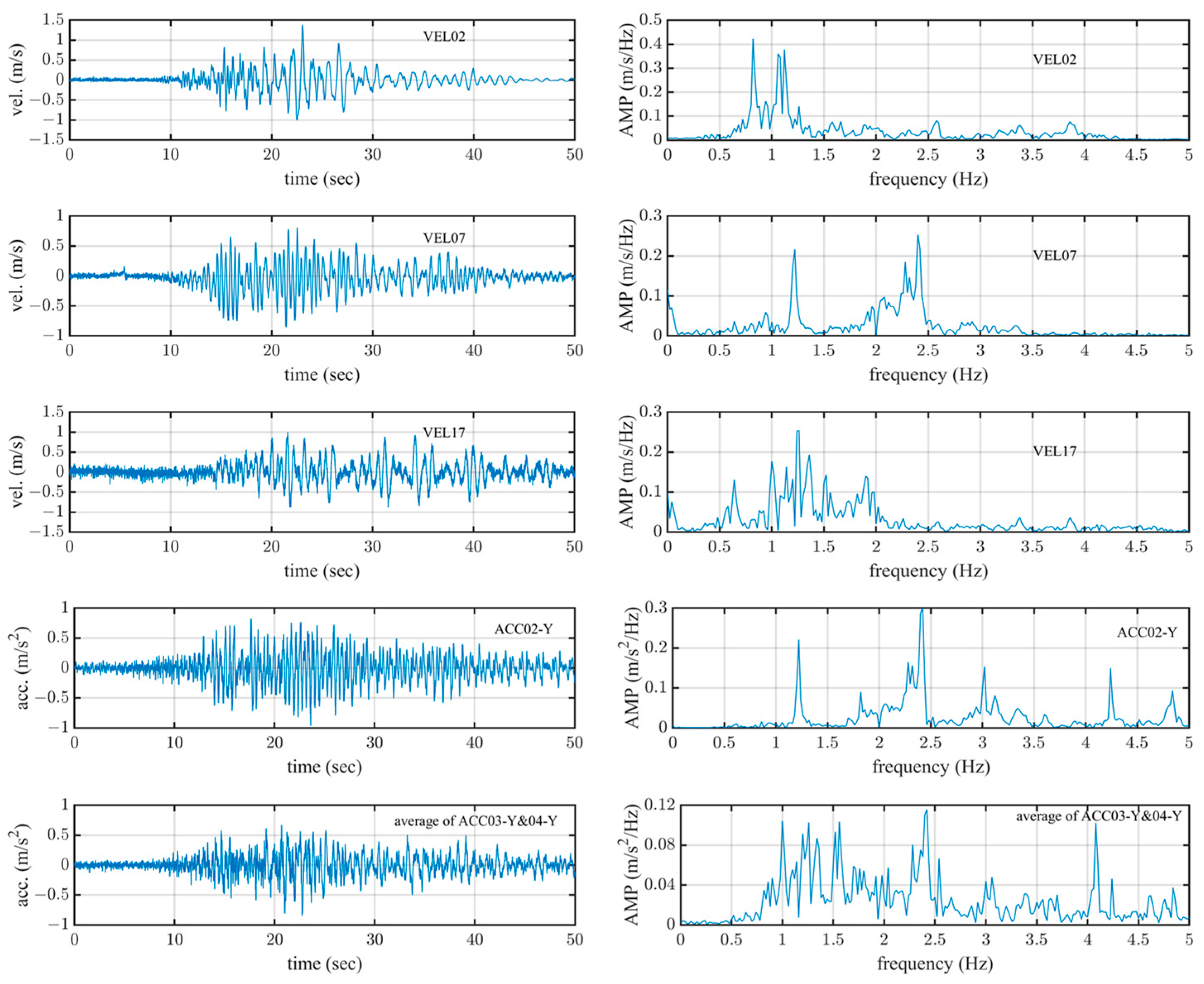
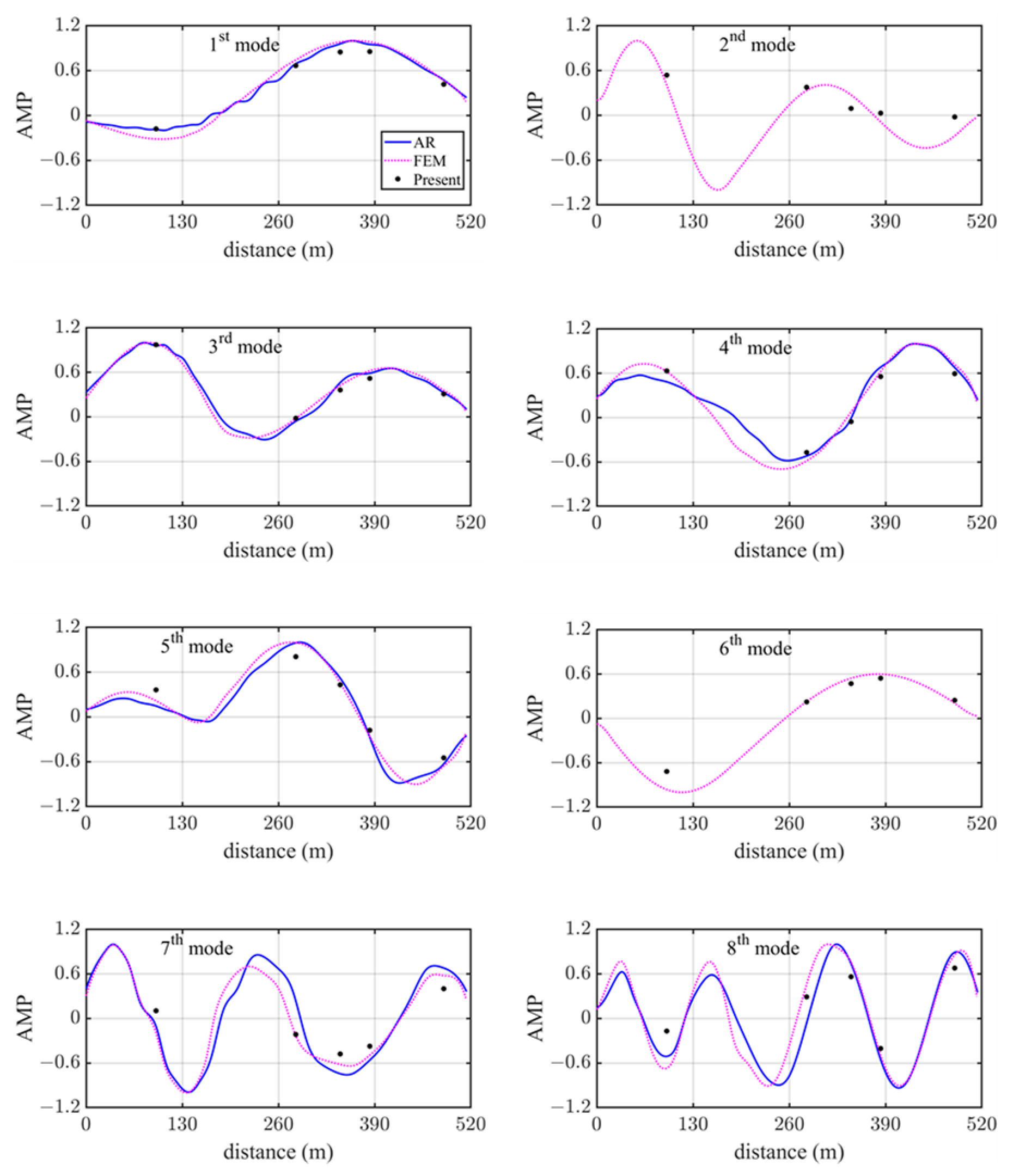
4.1. Application to a Two-Span Cable-Stayed Bridge
4.2. Application to a Five-Story Steel Frame
5. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Collura, D.; Nascimbene, R. Comparative assessment of variable loads and seismic actions on bridges: A case study in Italy using a multimodal approach. Appl. Sci. 2023, 13, 2771. [Google Scholar] [CrossRef]
- Zhang, H.; Reuland, Y.; Shan, J.; Chatzi, E. Post-earthquake structural damage assessment and damage state evaluation for RC structures with experimental validation. Eng. Struct. 2024, 304, 117591. [Google Scholar] [CrossRef]
- Farrar, C.R.; Doebling, S.W.; Nix, D.A. Vibration-based structural damage identification. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2001, 359, 131–150. [Google Scholar] [CrossRef]
- Qarib, H.; Adeli, H. Recent advances in health monitoring of civil structures. Sci. Iran. Trans. A Civ. Eng. 2014, 21, 1733–1742. [Google Scholar]
- Sony, S.; Laventure, S.; Sadhu, A. A literature review of next-generation smart sensing technology in structural health monitoring. Struct. Control. Health Monit. 2019, 26, e2321. [Google Scholar] [CrossRef]
- Sirca, G.F.; Adeli, H. System identification in structural engineering. Sci. Iran. Trans. A Civ. Eng. 2012, 19, 1355–1364. [Google Scholar] [CrossRef]
- Perez-Ramirez, C.A.; Amezquita-Sanchez, J.P.; Adeli, H.; Valtierra-Rodriguez, M.; Romero-Troncoso, R.J.; Dominguez-Gonzalez, A.; Osornio-Rios, R.A. Time-frequency techniques for modal parameters identification of civil structures from acquired dynamic signals. J. Vibroenginerring 2016, 18, 3164–3185. [Google Scholar] [CrossRef]
- Shokravi, H.; Shokravi, H.; Bakhary, N.; Rahimian Koloor, S.S.; Petru, M. Health monitoring of civil infrastructures by subspace system identification method: An overview. Appl. Sci. 2020, 10, 2786. [Google Scholar] [CrossRef]
- Safak, E.; Celebi, M. Seismic response of Transamerica building, II: System identification. J. Struct. Eng. ASCE 1991, 117, 2405–2425. [Google Scholar] [CrossRef]
- Loh, C.H.; Lin, H.M. Application of off-line and on-line identification techniques to building seismic response data. Earthq. Eng. Struct. Dyn. 1996, 25, 269–290. [Google Scholar] [CrossRef]
- Huang, C.S.; Hung, S.L.; Lin, C.I.; Su, W.C. A wavelet-based approach to identifying structural modal parameters from seismic response and free vibration data. Comput. Aided Civil Infrastruct. Eng. 2005, 20, 408–423. [Google Scholar] [CrossRef]
- Huang, C.S.; Su, W.C. Identification of modal parameters of a time invariant linear system by continuous wavelet transformation. Mech. Syst. Signal Process. 2007, 21, 1642–1664. [Google Scholar] [CrossRef]
- Satio, T.; Yokota, H. Evaluation of dynamic characteristics of high-rise buildings using system identification. J. Wind Eng. Ind. Aerodyn. 1996, 59, 299–307. [Google Scholar] [CrossRef]
- Moore, S.M.; Lai, J.C.S.; Shankar, K. ARMAX modal parameter identification in the presence of unmeasured excitation-I: Theoretical background. Mech. Syst. Signal Process. 2007, 21, 1601–1615. [Google Scholar] [CrossRef]
- Moore, S.M.; Lai, J.C.S.; Shankar, K. ARMAX modal parameter identification in the presence of unmeasured excitation-II: Numerical and experimental verification. Mech. Syst. Signal Process. 2007, 21, 1616–1641. [Google Scholar] [CrossRef]
- Dziedziech, K.; Czop, P.; Staszewski, W.J.; Uhl, T. Combined non-parametric and parametric approach for identification of time-variant systems. Mech. Syst. Signal Process. 2018, 103, 295–311. [Google Scholar] [CrossRef]
- Niedźwiecki, M. Identification of Time-Varying Processes; John Wiley & Sons: New York, NY, USA, 2000. [Google Scholar]
- Loh, C.H.; Lin, C.Y.; Huang, C.C. Time domain identification of frames under earthquake loadings. J. Eng. Mech-ASCE 2000, 126, 693–703. [Google Scholar] [CrossRef]
- Huang, C.S.; Liu, C.Y.; Su, W.C. Application of Cauchy wavelet transformation to identify time-variant modal parameters of structures. Mech. Syst. Signal Process. 2016, 80, 302–323. [Google Scholar] [CrossRef]
- Van Overschee, P.; De Moor, B. Subspace Identification of Linear Systems: Theory, Implementation, Applications; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1996. [Google Scholar]
- Shokravi, H.; Shokravi, H.; Bakhary, N.; Heidarrezaei, M.; Rahimian Koloor, S.S.; Petru, M. Application of the subspace-based methods in health monitoring of civil structures: A systematic review and meta-analysis. Appl. Sci. 2020, 10, 3607. [Google Scholar] [CrossRef]
- Li, Z.; Fu, J.Y.; Liang, Q.S.; Mao, H.J.; He, Y.C. Modal identification of civil structures via covariance-driven stochastic subspace method. Math. Biosci. Eng. 2019, 16, 5709–5728. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Hu, M.H.; Jiang, M.H.; Zuo, Z.N.; Zhu, Y.F.; Zhu, Z.Q. A modal parameter identification method based on improves covariance-driven stochastic subspace identification. ASME J. Eng. Gas Turbines Power. 2020, 142, 061005. [Google Scholar] [CrossRef]
- Cheynet, E.; Daniotti, N.; Jakobsen, J.B.; Snaebjörnsson, J. Improved long-span bridge modeling using data-driven identification of vehicle-induced vibrations. Struct. Control. Health Monit. 2020, 27, e2574. [Google Scholar] [CrossRef]
- Niu, Y.B.; Ye, Y.; Zhao, W.J.; Shu, J.P. Dynamic monitoring and data analysis of a long-span arch bridge based on high-rate GNSS-RTK measurement combining CF-CEEMD method. J. Civ. Struct. Health Monit. 2020, 11, 35–48. [Google Scholar] [CrossRef]
- Liu, Y.K.; Loh, C.S.; Ni, Y.Q. Stochastic subspace identification for output-only modal analysis: Application to super high-rise tower under abnormal loading condition. Earthq. Eng. Struct. Dyn. 2013, 42, 477–498. [Google Scholar] [CrossRef]
- Pioldi, F.; Rizzi, E. Assessment of frequency versus time domain enhanced technique for response-only modal dynamic identification under seismic excitation. Bull. Earthq. Eng. 2018, 16, 1547–1570. [Google Scholar] [CrossRef]
- Allemang, R.L.; Brown, D.L. A correlation coefficient for modal vector analysis. In Proceedings of the First International Modal Analysis Conference, Bethel, CT, USA, 6–9 April 1983; pp. 110–116. [Google Scholar]
- Kim, J.; Lynch, J.P. Subspace system identification of support-excited structures—Part I: Theory and black-box system identification. Earthq. Eng. Struct. Dyn. 2012, 41, 2235–2251. [Google Scholar] [CrossRef]
- Kim, J.; Lynch, J.P. Subspace system identification of support excited structures—Part II: Gray-box interpretations and damage detection. Earthq. Eng. Struct. Dyn. 2012, 41, 2253–2271. [Google Scholar] [CrossRef]
- Mellinger, P.; Döhler, M.; Mevel, L. Variance estimation of modal parameters from output-only and input/output subspace-based system identification. J. Sound Vib. 2016, 379, 1–27. [Google Scholar] [CrossRef]
- Moonen, M.; De Moor, B.; Vandenberghe, L.; Vandewalle, J. On and off-line identification of linear state space models. Int. J. Control 1989, 49, 219–232. [Google Scholar] [CrossRef]
- Van Overschee, P.; De Moor, B. N4SID: Subspace algorithms for identification of combined deterministic-stochastic systems. Automatica 1994, 30, 75–93. [Google Scholar] [CrossRef]
- Viberg, M.; Wahlbergs, B.; Otterstens, B. Analysis of state space system identification methods based on instrumental variables and subspace fitting. Auromatica 1997, 33, 1603–1616. [Google Scholar] [CrossRef]
- Mastronardi, N.; Kressner, D.; Sima, V.; Van Dooren, P.; Van Huffel, S. A fast algorithm for subspace state-space system identification via exploitation of the displacement structure. J. Comput. Appl. Math. 2001, 132, 71–81. [Google Scholar] [CrossRef]
- Yu, D.J.; Ren, W.X. EMD-based stochastic subspace identification of structures from operational vibration measurements. Eng. Struct. 2005, 27, 1741–1751. [Google Scholar] [CrossRef]
- Altunisik, A.C.; Sunca, F.; Sevim, F. Modal parameter identification and seismic assessment of historical timber structures under near-fault and far-fault ground motions. Structures 2023, 49, 1624–1651. [Google Scholar] [CrossRef]
- Gandino, E.; Garibaldi, L.; Marchesiello, S. Covariance-driven subspace identification: A complete input–output approach. J. Sound Vib. 2013, 332, 7000–7017. [Google Scholar] [CrossRef]
- Verhaegen, M.; Hansson, A. N2SID: Nuclear norm subspace identification of innovation models. Automatica 2016, 72, 57–63. [Google Scholar] [CrossRef]
- Juang, J.N. System realization using information matrix. J. Guid. Control Dyn. 1997, 20, 492–500. [Google Scholar] [CrossRef]
- Siringoringo, D.M.; Fujino, Y. Influence of movable bearings performance on the dynamic characteristics of a cable-stayed bridge: Insights from seismic monitoring records. Bull. Earthq. Eng. 2022, 20, 4639–4671. [Google Scholar] [CrossRef]
- Oku, H.; Kimura, H. A recursive 4SID from the input-output point of view. Asian J. Control 1999, 1, 258–269. [Google Scholar] [CrossRef]
- Oku, H.; Kimura, H. Recursive 4SID algorithms using gradient type subspace tracking. Automatica 2002, 38, 1035–1043. [Google Scholar] [CrossRef]
- Loh, C.H.; Chen, J.D. Tracking modal parameters from building seismic response data using recursive subspace identification algorithm. Earthq. Eng. Struct. Dyn. 2017, 46, 2163–2183. [Google Scholar] [CrossRef]
- Huang, S.K.; Chen, J.D.; Loh, K.J.; Loh, C.H. Discussion of user-defined parameters for recursive subspace identification: Application to seismic response of building structures. Earthq. Eng. Struct. Dyn. 2020, 49, 1738–1757. [Google Scholar] [CrossRef]
- Chopra, A.K. Dynamics of Structures. In Theory and Applications to Earthquake Engineering; Prentice Hall: Hoboken, NJ, USA, 2014. [Google Scholar]
- Huang, C.S.; Lin, H.L. Modal identification of structures from ambient vibration, free vibration, and seismic response data via a subspace approach. Earthq. Eng. Struct. Dyn. 2001, 30, 1857–1878. [Google Scholar] [CrossRef]
- Pesquet, J.C.; Krim, H.; Carfantan, H. Time-invariant orthonormal wavelet representations. IEEE Trans. Signal Process. 1996, 44, 1964–1970. [Google Scholar] [CrossRef]
- Fowler, J. The redundant discrete wavelet transform and additive noise. IEEE Signal Process. Lett. 2005, 12, 629–632. [Google Scholar] [CrossRef]
- Perez-Solano, J.J.; Felici-Castell, S.; Rodriguez-Hernandez, M.A. Narrowband interference suppression in frequency-hopping spread spectrum using undecimated wavelet packet transform. IEEE Trans. Veh. Technol. 2008, 57, 1620–1629. [Google Scholar] [CrossRef]
- Mallat, S. A Wavelet Tour of Signal Processing, 2nd ed.; Academic: San Diego, CA, USA, 1999. [Google Scholar]
- Viberg, M. Subspace-based methods for the identification of linear time-invariant systems. Automatica 1995, 31, 1835–1851. [Google Scholar] [CrossRef]
- Verhaegen, M. Identification of the deterministic part of MIMO state space models given in innovations form from input-output data. Automatica 1994, 30, 61–74. [Google Scholar] [CrossRef]
- Yang, Q.J.; Zhang, P.Q.; Liand, C.Q.; Wu, X.P. System theory approach to multi-input multi-output modal parameters identification method. Mech. Syst. Signal Process. 1994, 8, 159–174. [Google Scholar] [CrossRef]
- Su, W.C.; Huang, C.S.; Chen, C.H.; Liu, C.Y.; Huang, H.C.; Le, Q.T. Identifying the modal parameters of a structure from ambient vibration data via the stationary wavelet packet. Comput. Aided Civil Infrastruct. Eng. 2014, 29, 738–757. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode No. | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| ƒn (Hz) | 0.80 | 2.14 | 3.15 | 4.24 | 5.00 | 5.44 |
| (0.80) | (2.14) | (3.15) | (4.25) | (5.04) | (5.37) | |
| ξ (%) | 5.19 | 5.27 | 5.20 | 5.02 | 4.65 | 5.22 |
| (5.00) | (5.00) | (5.00) | (5.00) | (5.00) | (5.00) | |
| MAC | 1.00 | 1.00 | 1.00 | 0.99 | 0.98 | 0.98 |
| Mode | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | |
|---|---|---|---|---|---|---|---|---|---|
| Present | ƒn (Hz) | 0.64 | 1.19 | 1.71 | 2.21 | 2.53 | 2.83 | 3.14 | 3.82 |
| ξ | 0.038 | 0.032 | 0.033 | 0.034 | 0.029 | 0.036 | 0.029 | 0.028 | |
| MAC | 0.98 | 0.97 | 0.99 | 0.99 | 0.97 | 0.99 | 0.97 | 0.98 | |
| Ambient vibrations [55] | ƒn (Hz) | 0.65 | / | 1.64 | 2.19 | 2.57 | / | 3.17 | 3.89 |
| ξ | 0.026 | / | 0.027 | 0.024 | 0.029 | / | 0.026 | 0.028 | |
| MAC | 0.97 | / | 0.98 | 0.97 | 0.97 | / | 0.96 | 0.98 | |
| FEM | ƒn (Hz) | 0.65 | 1.17 | 1.68 | 2.15 | 2.49 | 2.81 | 3.15 | 3.95 |
| MAC | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, W.-C.; Chen, L.-J.; Huang, C.-S. Modal Parameter Identification of a Structure Under Earthquake via a Wavelet-Based Subspace Approach. Appl. Sci. 2024, 14, 2503. https://doi.org/10.3390/app14062503
Su W-C, Chen L-J, Huang C-S. Modal Parameter Identification of a Structure Under Earthquake via a Wavelet-Based Subspace Approach. Applied Sciences. 2024; 14(6):2503. https://doi.org/10.3390/app14062503
Chicago/Turabian StyleSu, Wei-Chih, Liane-Jye Chen, and Chiung-Shiann Huang. 2024. "Modal Parameter Identification of a Structure Under Earthquake via a Wavelet-Based Subspace Approach" Applied Sciences 14, no. 6: 2503. https://doi.org/10.3390/app14062503