

Investigation of Modal Identification of Frame Structures Using Blind Source Separation Technique Based on Vibration Data

Abstract
:1. Introduction
2. Blind Source Separation Techniques
2.1. BSS Model
2.2. Correspondence in Modal Coordinates
2.3. Complexity Pursuit Algorithm (CP)
2.3.1. Complexity and Predictability
2.3.2. Measuring Complexity Using Signal Predictability
- Long-term predictor (t): α is in the range of 0 to 0.3, when α close to (t) ≈ 0;
- Short-term predictor (t): α is in the range of 0.4 to 1.
2.3.3. Extracting a Single Signal
2.4. Generalized Eigen Decomposition (GED)
2.5. Extraction of Modal Parameters
3. Numerical Simulation
3.1. Suspension Bridge System
3.2. Simulation Results and Discussion
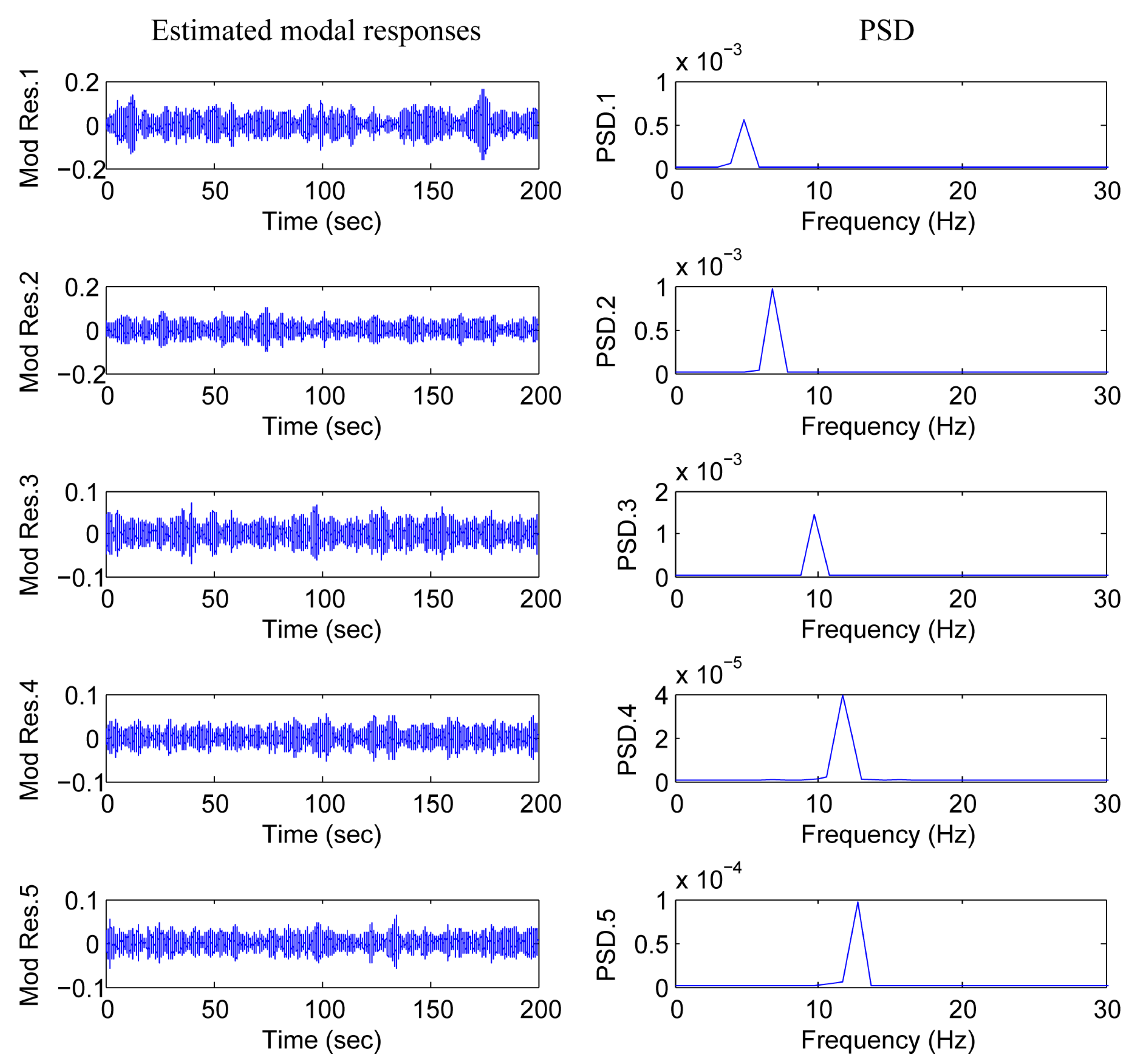
3.2.1. Results Analysis of Complexity Pursuit
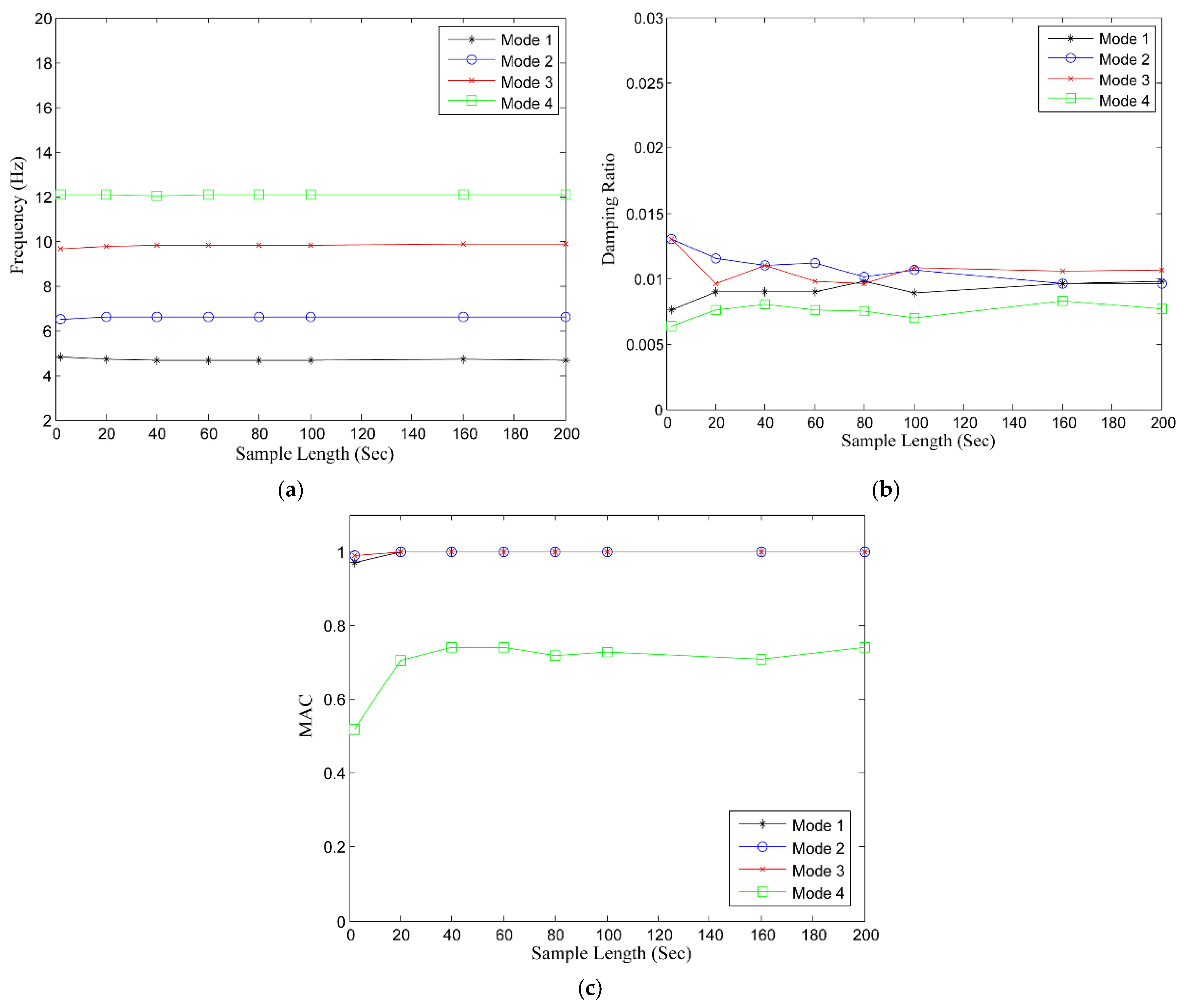
3.2.2. Results Analysis of Generalized Eigen Decomposition
4. Experimental Verification
4.1. Experimental Setup
4.2. Experimental Results and Discussion
5. Application of BSS Methods in Overhead Transmission Line-Crossing Frame
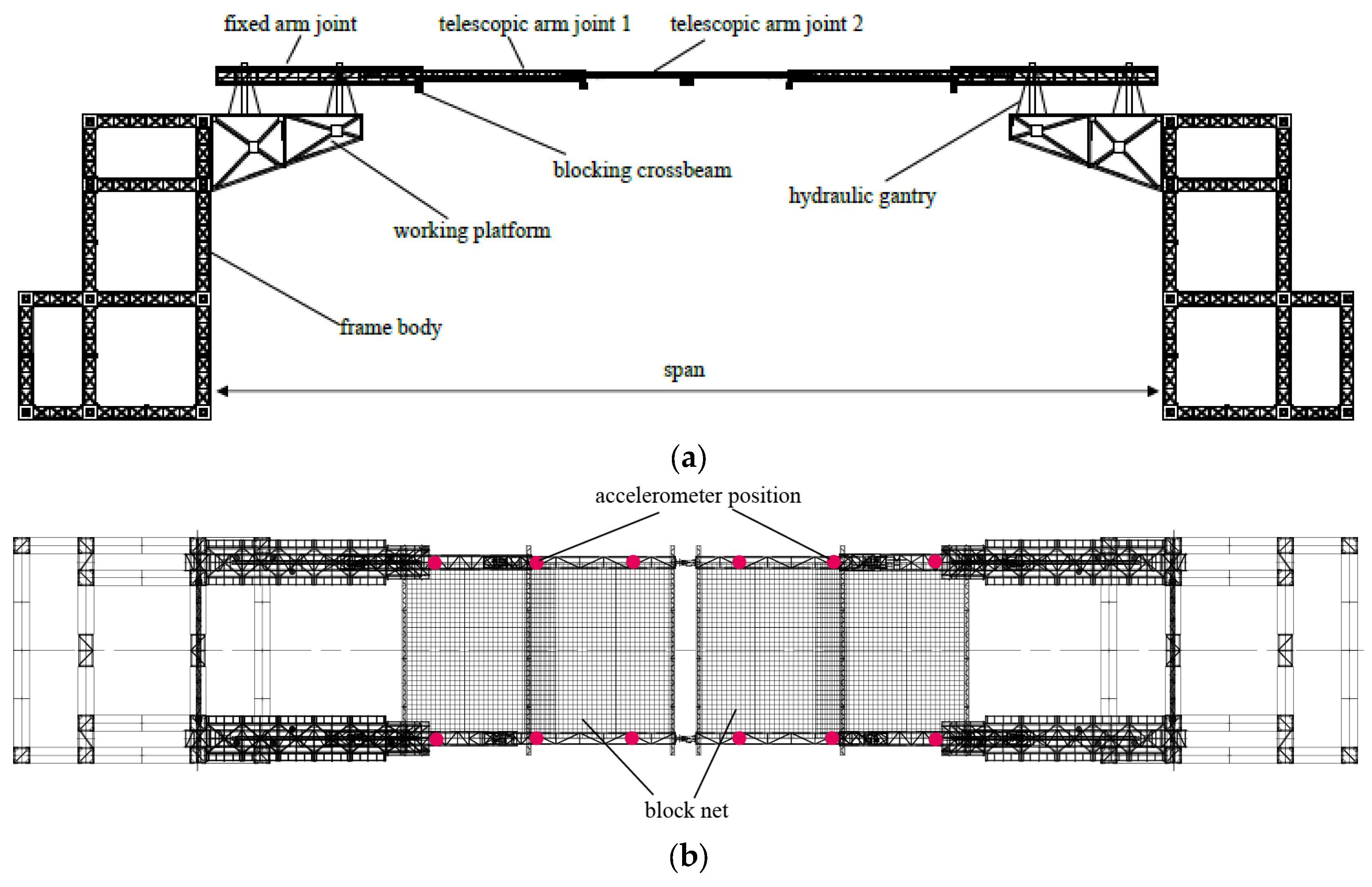
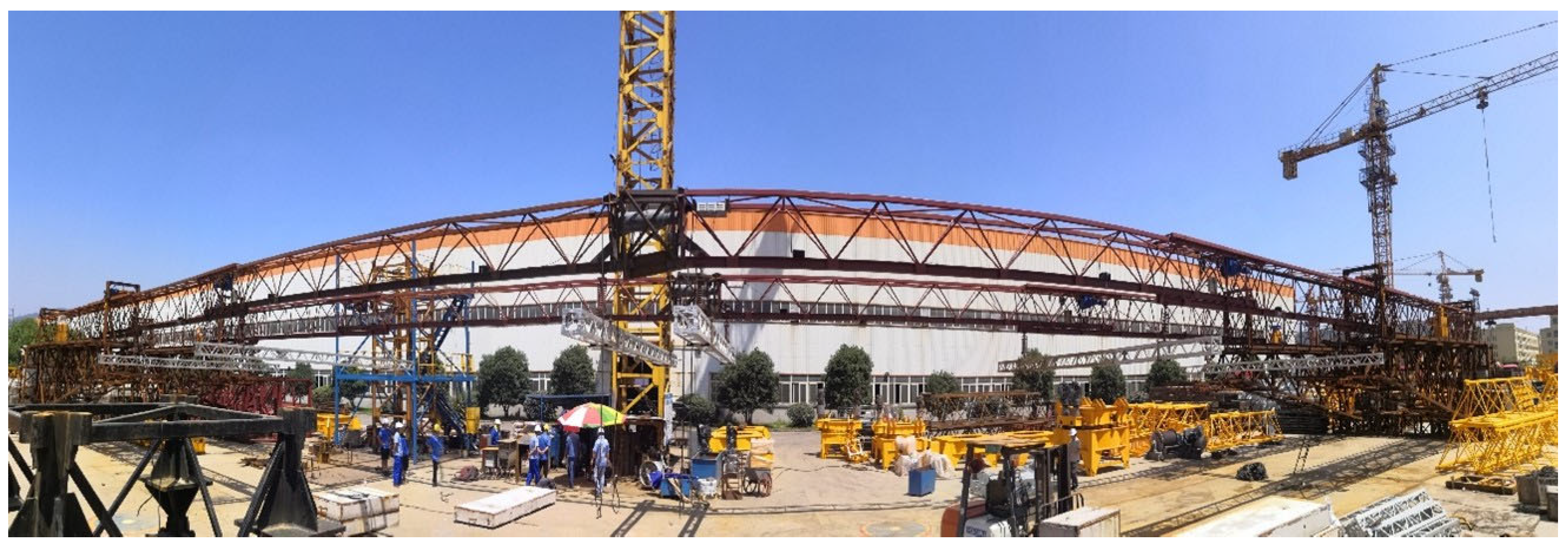
5.1. Overhead Transmission Line-Crossing Frame System
5.2. Result Analysis
6. Conclusions
- This study explored the feasibility of the novel BSS learning rules CP and GED in modal identification of a suspension bridge. Comparison of these two methods showed that the GED method was accurate; however, as the noise increased, the accuracy declined severely. Under a laboratory environment, GED is more applicable because this method has higher computing efficiency and accuracy than CP. However, the CP method has efficient mixed modal identification capabilities. The disadvantage of the BSS method is that the order of identifiable modes is limited by the number of sensors and cannot identify the mode which is not always well excited by ambient sources.
- The CP and GED methods are capable of successfully identifying modal parameters of the crossing frame under ambient excitation, which further verifies the effectiveness of the identification algorithm in civil structures.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Siringoringo, D.M.; Fujino, Y. System identification of suspension bridge from ambient vibration response. Eng. Struct. 2008, 30, 462–477. [Google Scholar] [CrossRef]
- Peeters, B.; Ventura, C.E. Comparative study of modal analysis techniques for bridge dynamic characteristics. Mech. Syst. Signal Process. 2003, 17, 965–988. [Google Scholar] [CrossRef]
- Peter, C.C.; Alison, F.; Liu, S.C. Review paper: Health monitoring of civil infrastructure. Struct. Health Monit. 2003, 2, 257–267. [Google Scholar]
- Wu, Q.; Takahashi, K.; Okabayashi, T. Response characteristics of local vibrations in stay cables on an existing cable-stayed bridge. J. Sound Vib. 2003, 261, 403–420. [Google Scholar] [CrossRef]
- García-Palencia, A.J.; Santini-Bell, E. A two-step model updating algorithm for parameter identification of linear elastic damped structures. Comput.-Aided Civ. Infrastruct. Eng. 2013, 28, 509–521. [Google Scholar] [CrossRef]
- White, R.E.; Alexander, N.A.; Macdonald, J.H.; Bocian, M. Characterisation of crowd lateral dynamic forcing from full-scale measurements on the Clifton Suspension Bridge. Structures 2020, 24, 415–425. [Google Scholar] [CrossRef]
- Nikitas, N.; Macdonald, J.; Jakobsen, J.B. Identification of flutter derivatives from full-scale ambient vibration measurements of the Clifton Suspension Bridge. Wind Struct. 2011, 14, 221–238. [Google Scholar] [CrossRef]
- Tong, L.; Soon, V.C.; Huang, Y.F. AMUSE: A new blind identification algorithm. Proc. IEEE Icassp. 1990, 3, 1784–1787. [Google Scholar]
- Tong, L.; Liu, R.W.; Soon, V.C. Indeterminacy and identifiability of blind identification. IEEE Trans. Circuits Syst. 1991, 38, 499–509. [Google Scholar] [CrossRef]
- Hyvärinen, A. Complexity pursuit: Separating interesting components from time series. Neural Comput. 2001, 13, 883–898. [Google Scholar] [CrossRef]
- Hyvärinen, A. Gaussian moments for noisy independent component analysis. IEEE Signal Proc. LET 1999, 6, 145–147. [Google Scholar] [CrossRef]
- Feng, M.; Kammeyer, K.D. Blind source separation for communication signals using antenna arrays. In Proceedings of the IEEE 1998 International Conference on Universal Personal Communications, Florence, Italy, 5–9 October 1998; pp. 665–669. [Google Scholar]
- Poh, M.Z.; McDuff, D.J.; Picard, R.W. Non-contact, automated cardiac pulse measurements using video imaging and blind source separation. Opt. Express 2010, 18, 10762–10774. [Google Scholar] [CrossRef] [PubMed]
- De Ridder, D.; Vanneste, S.; Congedo, M. The distressed brain: A group blind source separation analysis on tinnitus. PLoS ONE 2011, 6, e24273. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Geng, X.; Zhao, Y.; Wang, F. A new volume formula for a simplex and its application to endmember extraction for hyperspectral image analysis. Int. J. Remote Sens. 2010, 31, 1027–1035. [Google Scholar] [CrossRef]
- Antoni, J. Blind separation of vibration components: Principles and demonstrations. Mech. Syst. Signal Process. 2005, 19, 1166–1180. [Google Scholar] [CrossRef]
- Kerschen, G.; Poncelet, F.; Golinval, J.C. Physical interpretation of independent component analysis in structural dynamics. Mech. Syst. Signal Process. 2007, 21, 1561–1575. [Google Scholar] [CrossRef]
- Belouchrani, A.; Abed-Meraim, K.; Cardoso, J.F. A blind source separation technique using second-order statistics. IEEE Trans. Signal Proc. 2007, 45, 434–444. [Google Scholar] [CrossRef] [Green Version]
- Zhou, W.; Chelidze, D. Blind source separation based vibration mode identification. Mech. Syst. Signal Process. 2007, 21, 3072–3087. [Google Scholar] [CrossRef]
- Poncelet, F.; Kerschen, G.; Golinval, J.C. Output-only modal analysis using blind source separation techniques. Mech. Syst. Signal Process. 2007, 21, 2335–2358. [Google Scholar] [CrossRef]
- Yang, Y.; Nagarajaiah, S. Blind identification of damage in time-varying systems using independent component analysis with wavelet transform. Mech. Syst. Signal Process. 2014, 47, 3–20. [Google Scholar] [CrossRef]
- Yang, Y.; Nagarajaiah, S. Time-frequency blind source separation using independent component analysis for output-only modal identification of highly damped structures. J. Struct Eng. 2012, 139, 1780–1793. [Google Scholar] [CrossRef]
- McNeill, S.I.; Zimmerman, D.C. A framework for blind modal identification using joint approximate diagonalization. Mech. Syst. Signal Process. 2008, 22, 1526–1548. [Google Scholar] [CrossRef]
- Hazra, B.; Roffel, A.J.; Narasimhan, S. Modified cross-correlation method for the blind identification of structures. J. Eng. Mech. 2009, 136, 889–897. [Google Scholar] [CrossRef]
- Antoni, J.; Chauhan, S. A study and extension of second-order blind source separation to operational modal analysis. J. Sound Vib. 2013, 332, 1079–1106. [Google Scholar] [CrossRef]
- Stone, J.V. Blind source separation using temporal predictability. Neural Comput. 2001, 13, 1559–1574. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, Y.; Nagarajaiah, S. Blind modal identification of output-only structures in time-domain based on complexity pursuit. Eng. Struct. Dyn. 2013, 42, 1885–1905. [Google Scholar] [CrossRef]
- Molgedey, L.; Schuster, H.G. Separation of a mixture of independent signals using time delayed correlations. Phys. Rev. Lett. 1994, 72, 3634. [Google Scholar] [CrossRef] [Green Version]
- Tomé, A.M. Separation of a mixture of signals using linear filtering and second order statistics. In Proceedings of the European Symposium on Artificial Neural Networks ESANN 2002, Bruges, Belgium, 24 April 2002; pp. 307–312. [Google Scholar]
- Tomé, A.M. The generalized eigen decomposition approach to the blind source separation problem. Dig. Signal Proc. 2006, 16, 288–302. [Google Scholar] [CrossRef]
- Xie, S.; He, Z.; Fu, Y. A note on Stone’s conjecture of blind signal separation. Neural Comput. 2005, 17, 321–330. [Google Scholar] [CrossRef]
- Cardoso, J.F.; Laheld, B.H. Equivariant adaptive source separation. IEEE Trans. Signal Proc. 1996, 44, 3017–3030. [Google Scholar] [CrossRef] [Green Version]
- Souloumiac, A. Blind source detection and separation using second order non-stationarity. In Proceedings of the Acoustics, Speech, and Signal Processing, Detroit, MI, USA, 9–12 May 1995; Volume 3, pp. 1912–1915. [Google Scholar]
- Tomé, A.M. An iterative eigen decomposition approach to blind source separation. In Proceedings of the Third International Conference on Independent Component Analysis and Signal Separation, San Diego, CA, USA, 15 January 2001; pp. 424–428. [Google Scholar]
- Chang, C.; Ding, Z.; Yau, S.F. A matrix-pencil approach to blind separation of non-white sources in white noise. In Proceedings of the Acoustics, Speech and Signal Processing, Seattle, WA, USA, 15 May 1998; Volume 4, pp. 2485–2488. [Google Scholar]
- Chang, C.; Ding, Z.; Yau, S.F. A matrix-pencil approach to blind separation of colored nonstationary signals. IEEE Trans. Signal Proc. 2000, 48, 900–907. [Google Scholar] [CrossRef] [Green Version]
- Meng, F.H.; Yu, J.J.; Alaluf, D.; Mokrani, B.; Preumont, A. Modal flexibility-based damage detection for suspension bridge hangers: A numerical and experimental investigation. Smart Struct. Syst. 2019, 23, 15–29. [Google Scholar]
- Meng, F.H.; Mokrani, B.; Alaluf, D.; Yu, J.J.; Preumont, A. Damage detection in active suspension bridges: An experimental investigation. Sensors 2018, 18, 3002. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Meng, F.H.; Wan, J.C.; Xia, Y.J.; Ma, Y.; Yu, J.J. A multi-degree of freedom tuned mass damper design for vibration mitigation of a suspension bridge. Appl. Sci. 2020, 10, 457. [Google Scholar] [CrossRef] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | Numerical [Hz] | Experimental [Hz] | Numerical Mode Shape 3 | Experimental Mode Shape 4 |
|---|---|---|---|---|
| 1st B 1 | 4.7 | 5.1 |  |  |
| 2nd B | 6.5 | 6 |  |  |
| 1st T 2 | 9.8 | 10.1 |  |  |
| 3rd B | 12.3 | 11.8 |  |  |
| 2nd T | 12.1 | 13.2 |  |  |
| 4th B | 17.6 | 19.1 |  |  |
| Mode | Theoretical Value | Identified (Without Noise) | Identified (1–5% RMS Noise) | |||||
|---|---|---|---|---|---|---|---|---|
| f (Hz) | ξ | f (Hz) | ξ | MAC | f (Hz) | ξ | MAC | |
| 1 (1st B) | 4.69 | 0.01 | 4.67 | 0.009 | 1 | 4.66 | 0.012 | 1 |
| 2 (2nd B) | 6.51 | 0.01 | 6.51 | 0.011 | 1 | 6.54 | 0.012 | 1 |
| 3 (1st T) | 9.82 | 0.01 | 9.84 | 0.011 | 1 | 9.76 | 0.008 | 0.92 |
| 4 (2nd T) | 12.07 | 0.01 | 12.04 | 0.008 | 0.74 | 12.11 | 0.006 | 0.69 |
| 5 (3rd B) | 12.31 | 0.01 | 12.32 | 0.009 | 0.99 | 12.34 | 0.009 | 0.94 |
| 6 | 14.47 | 0.01 | 14.46 | 0.009 | 0.96 | 14.56 | 0.009 | 0.90 |
| 7 (4th B) | 17.60 | 0.01 | 17.64 | 0.009 | 0.99 | 17.57 | 0.012 | 0.90 |
| 8 | 19.07 | 0.01 | 19.07 | 0.009 | 1 | 18.90 | 0.008 | 0.92 |
| 9 | 23.36 | 0.01 | 23.35 | 0.008 | 0.99 | 23.34 | 0.007 | 0.96 |
| Mode | Theoretical Value | Identified (Without Noise) | Identified (1–5% RMS Noise) | |||||
|---|---|---|---|---|---|---|---|---|
| f (Hz) | ξ | f (Hz) | ξ | f (Hz) | ξ | f (Hz) | MAC | |
| 1 (1st B) | 4.69 | 0.01 | 4.67 | 0.011 | 1 | 4.71 | 0.009 | 1 |
| 2 (2nd B) | 6.51 | 0.01 | 6.51 | 0.01 | 1 | 6.55 | 0.011 | 1 |
| 3 (1st T) | 9.82 | 0.01 | 9.82 | 0.009 | 1 | 9.83 | 0.008 | 0.95 |
| 4 (2nd T) | 12.07 | 0.01 | 12.08 | 0.009 | 1 | 12.03 | 0.012 | 0.98 |
| 5 (3rd B) | 12.31 | 0.01 | 12.34 | 0.011 | 0.97 | 12.37 | 0.006 | 1 |
| 6 | 14.47 | 0.01 | 14.51 | 0.012 | 0.93 | -- | -- | -- |
| 7 (4th B) | 17.60 | 0.01 | 17.60 | 0.008 | 1 | 17.63 | 0.008 | 0.98 |
| 8 | 19.07 | 0.01 | 19.05 | 0.01 | 1 | -- | -- | -- |
| 9 | 23.36 | 0.01 | 23.36 | 0.01 | 1 | -- | -- | -- |
| Mode | Input-Output (FRF) | Identified by CP | Identified by GED | ||||
|---|---|---|---|---|---|---|---|
| f (Hz) | f (Hz)/Error | ξ(%) | MAC | f (Hz)/Error | ξ(%) | MAC | |
| 1 (1st B) | 5.12 | 5.13/0.20% | 0.28 | 0.96 | 5.14/0.39% | 0.29 | 0.96 |
| 2 (2nd B) | 5.78 | 5.82/0.69% | 1.48 | 0.86 | 5.80/0.35% | 1.43 | 0.87 |
| 3 (1st T) | 10.14 | 10.12/0.20% | 0.60 | 0.82 | 10.15/0.10% | 0.59 | 0.99 |
| 4 (3rd B) | 11.76 | -- | -- | -- | 11.62/1.19% | 0.36 | 0.81 |
| 5 (2nd T) | 13.20 | 13.18/0.15% | 0.25 | 0.96 | 13.20/0% | 0.19 | 0.98 |
| 6 (4nd B) | 19.06 | 19.07/0.05% | 0.21 | 0.96 | 19.06/0% | 0.21 | 0.96 |
| CPU Time | 5.47 s | 2.6 s | |||||
| Mode | f (Hz) | ξ (%) | Mode Shape 1 |
|---|---|---|---|
| 1st B | 1.00 | 2.08 |  |
| 1st T | 1.22 | 3.19 |  |
| 2nd B | 1.59 | 1.04 |  |
| 2nd T | 2.25 | 1.22 |  |
| 3rd B | 4.44 | 0.59 |  |
| Mode | Input-Output (FRF) | Identified by CP | Identified by GED | |||||
|---|---|---|---|---|---|---|---|---|
| f (Hz) | ξ (%) | f (Hz)/Error | ξ (%)/Error | MAC | f (Hz)/Error | ξ (%)/Error | MAC | |
| 1 (1st B) | 1.00 | 2.08 | 1.01/1.0% | 1.98/4.8% | 0.99 | 1.00/0% | 2.16/3.8% | 0.99 |
| 2 (1st T) | 1.22 | 3.19 | 1.25/2.5% | 3.05/4.4% | 0.84 | 1.21/0.8% | 3.21/0.6% | 0.89 |
| 3 (2nd B) | 1.59 | 1.04 | 1.52/4.4% | 1.18/13.5% | 0.92 | 1.60/0.6% | 1.10/5.8% | 0.98 |
| 4 (2nd T) | 2.25 | 1.22 | 2.26/0.4% | 1.25/2.5% | 0.96 | 2.28/1.3% | 1.31/7.4% | 0.99 |
| 5 (3rd B) | 4.44 | 0.59 | 4.47/0.7% | 0.68/15.3% | 0.89 | 4.43/0.2% | 0.55/6.8% | 0.91 |
| CPU Time | 7.52 s | 4.65 s | ||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, F.; Ma, Y.; Xia, Y.; Ma, Y.; Jiang, M. Investigation of Modal Identification of Frame Structures Using Blind Source Separation Technique Based on Vibration Data. Appl. Sci. 2023, 13, 7249. https://doi.org/10.3390/app13127249
Meng F, Ma Y, Xia Y, Ma Y, Jiang M. Investigation of Modal Identification of Frame Structures Using Blind Source Separation Technique Based on Vibration Data. Applied Sciences. 2023; 13(12):7249. https://doi.org/10.3390/app13127249
Chicago/Turabian StyleMeng, Fanhao, Yong Ma, Yongjun Xia, Yimin Ma, and Ming Jiang. 2023. "Investigation of Modal Identification of Frame Structures Using Blind Source Separation Technique Based on Vibration Data" Applied Sciences 13, no. 12: 7249. https://doi.org/10.3390/app13127249