1. Introduction
The synthetic aperture radar has applications in remote observation of the Earth’s surface, forest monitoring [
1], agriculture [
2], damage detection in earthquakes [
3], maritime surveillance [
4], cartography, topography [
5], and the generation of three-dimensional models of the surface of interest [
6]. The synthetic aperture radar system can be installed on board space vehicles such as satellites, aerial vehicles such as UAVs (unmanned aerial vehicles) and airplanes, and ground vehicles such as automobiles automobilesar. Synthetic aperture radars transmit a chirp signal with linear frequency modulation through pulses; that is, they are pulsed synthetic aperture radars. Furthermore, it is not necessary to add the word pulsed because it is understood. Continuous waves with linear frequency modulation synthetic aperture radars transmit a chirp signal continuously; these radars are economically low cost compared with the SAR system [
7].
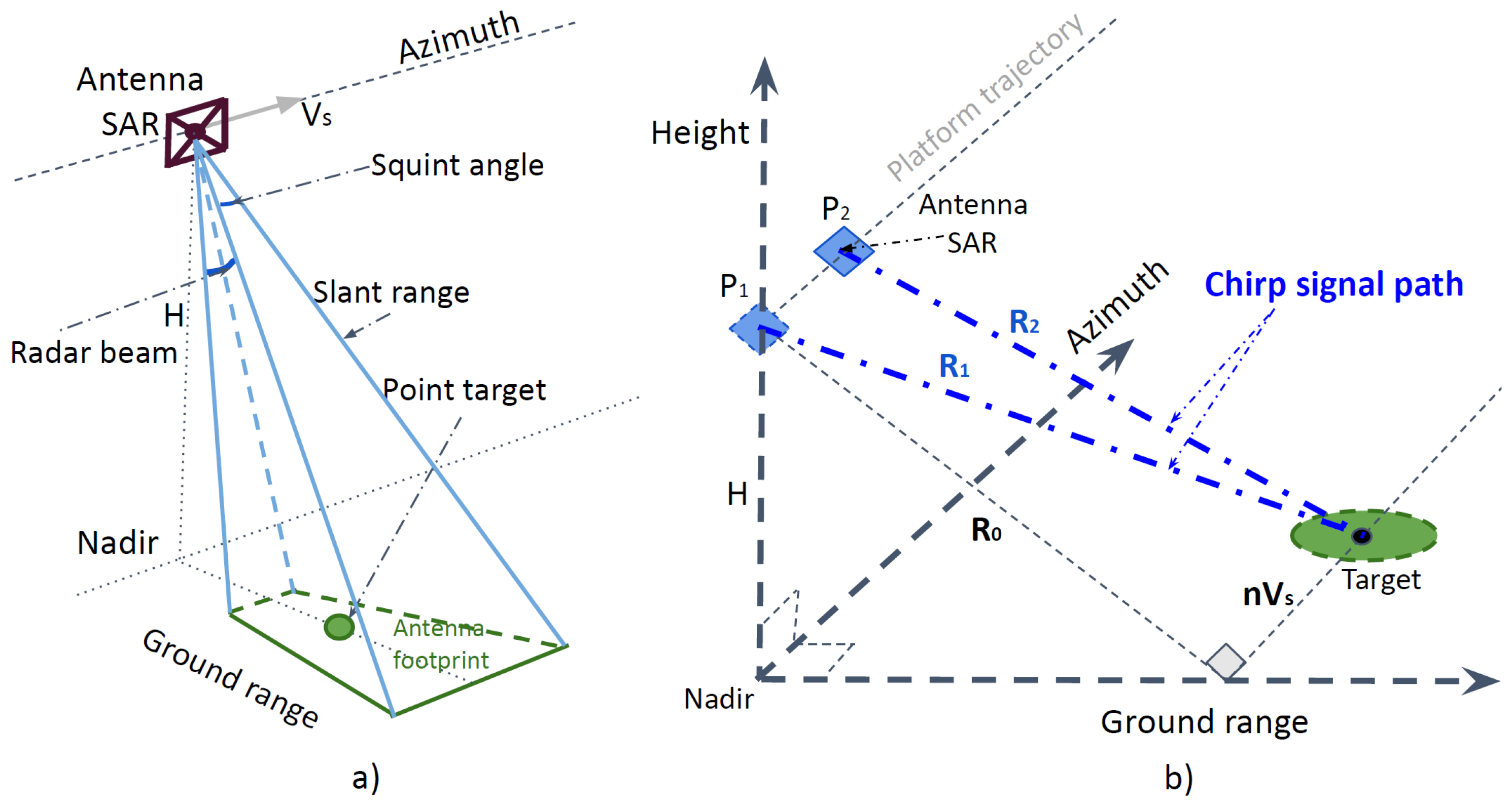
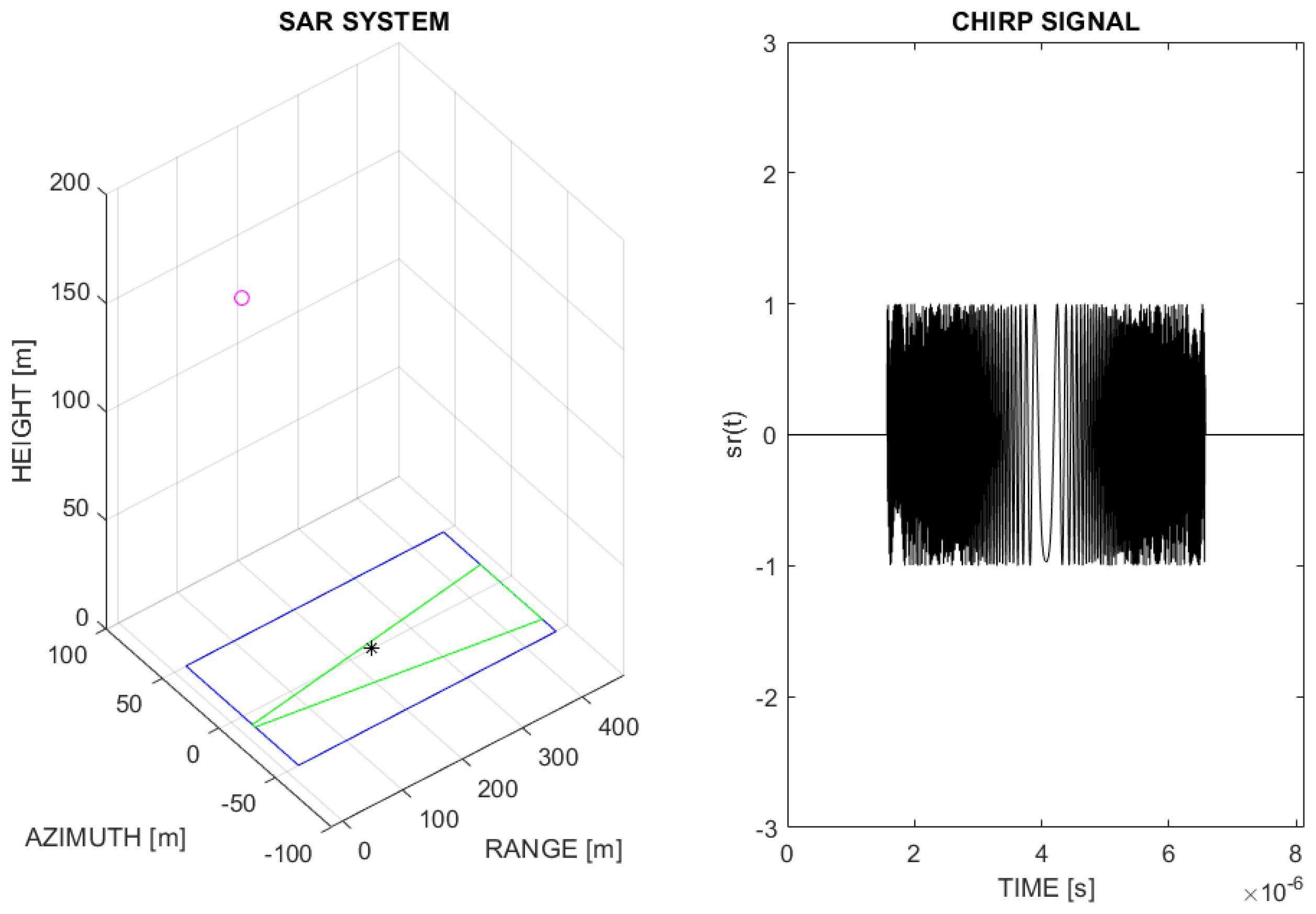
The operation of a synthetic aperture radar consists of the transmission of chirp signals and the subsequent reception of said chirp signals backscattered over a surface of interest. The platform of a synthetic aperture radar (SAR) system must move in a straight line with a constant speed to simulate a gigantic antenna using aperture synthesis. The reception of backscattered signals is carried out using an antenna [
8]; these backscattered signals pass through the SAR system, which conditions them appropriately to generate SAR raw data.
SAR raw data are a matrix of raw signals [
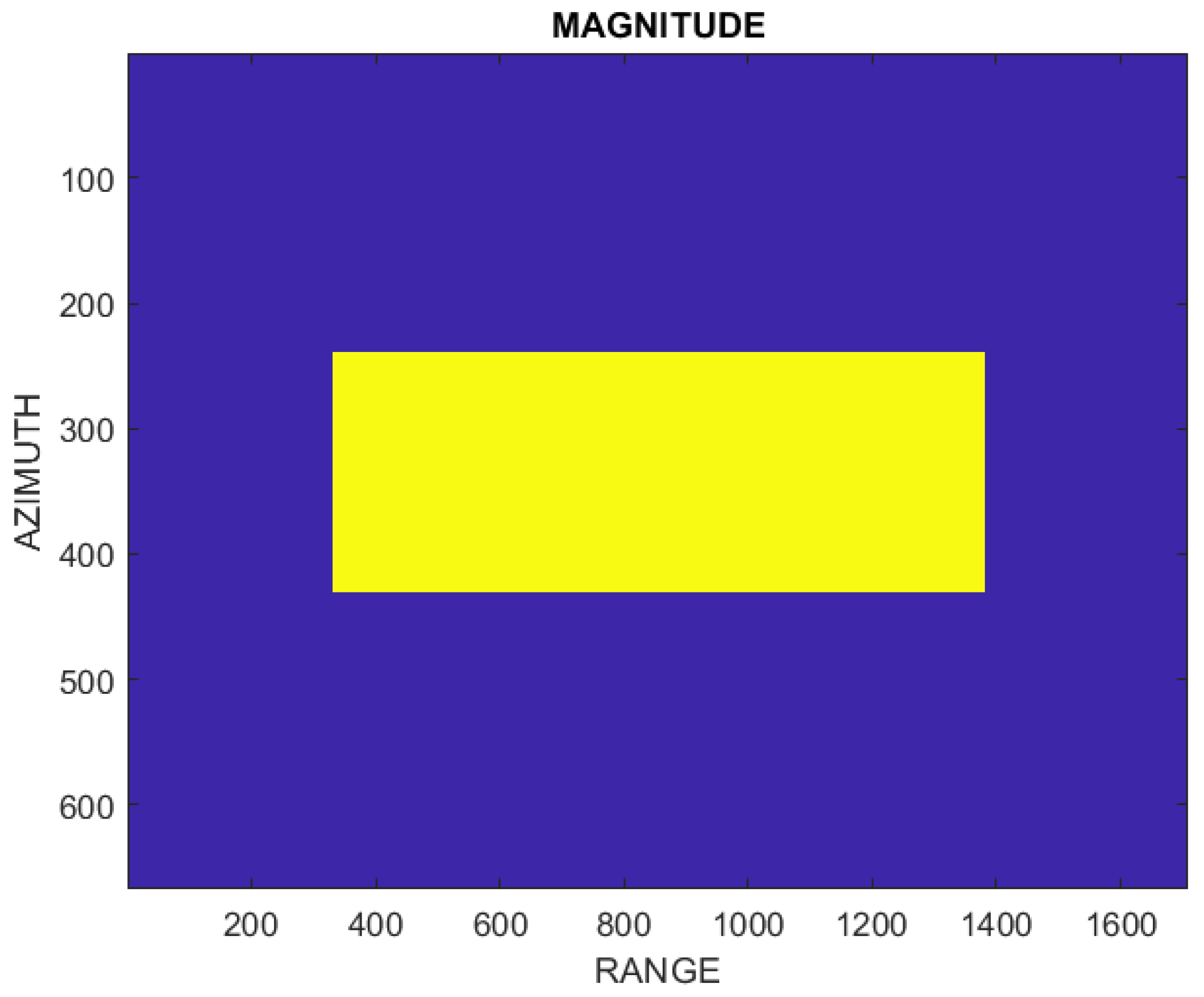
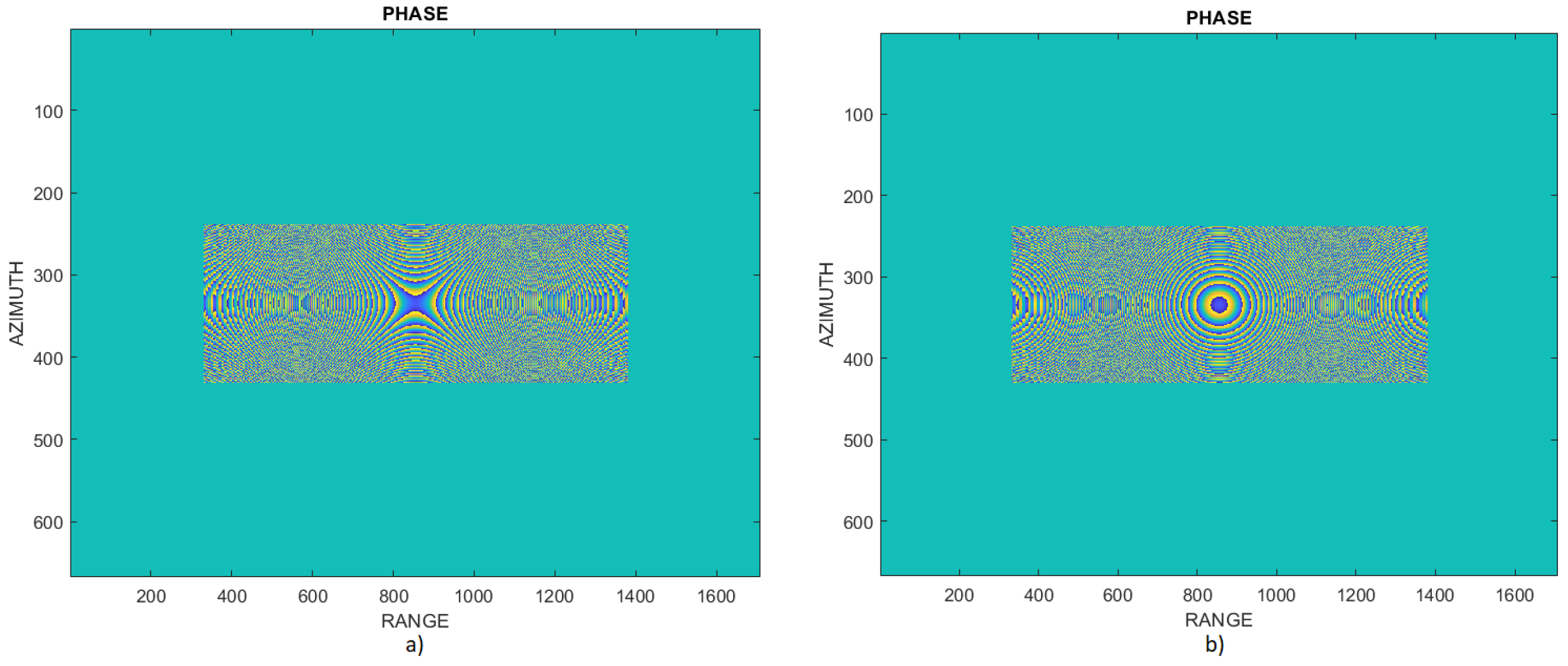
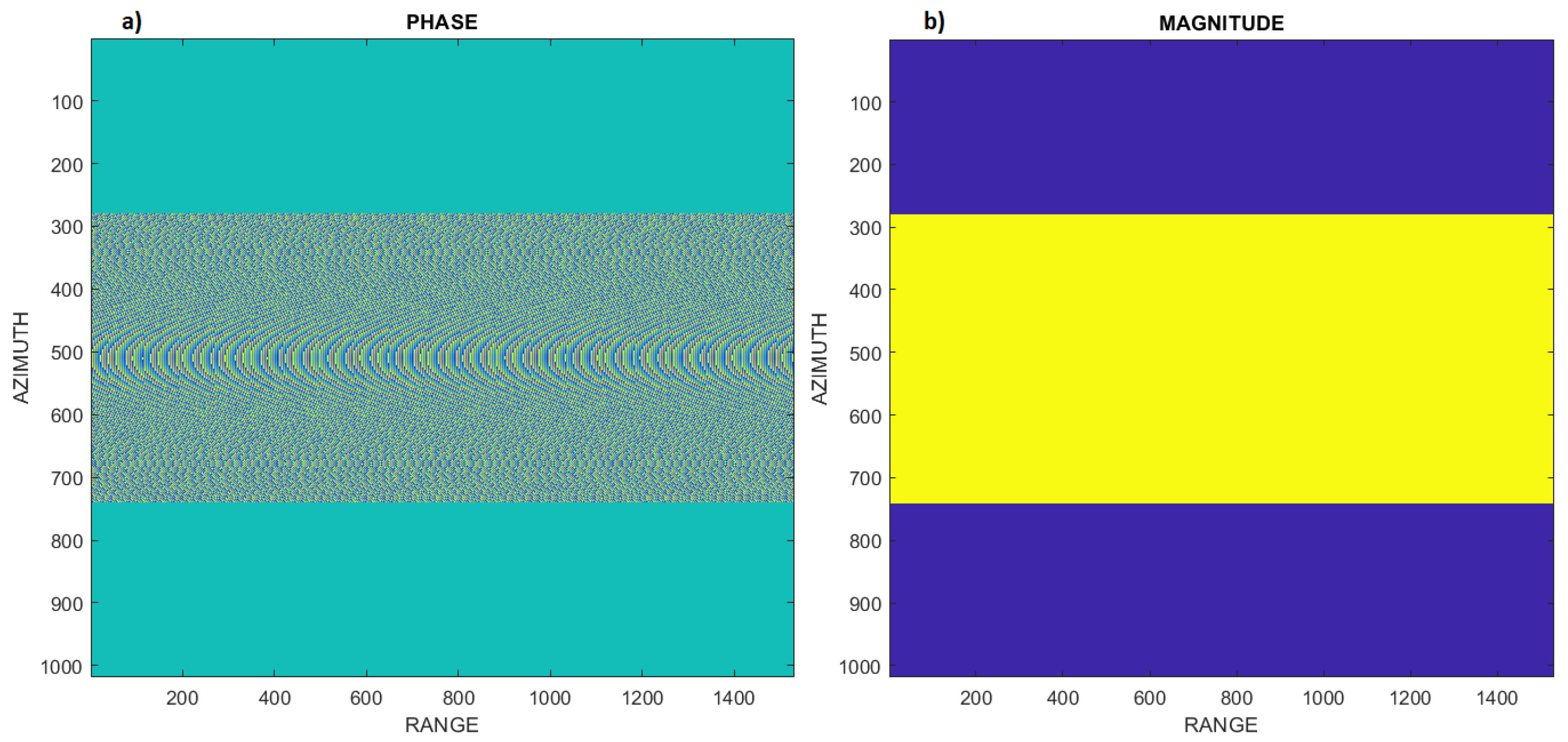
9] that are sampled using a slow time frequency in azimuth and a fast time frequency in range; the raw signal matrix contains electromagnetic information about the reflectivity of the surfaces of interest. On the other hand, SAR raw data elements are generally complex values; therefore, the amplitude of the complex values represents the intensity of the electromagnetic signal and the phase of that value contains distance, geometry, and surface feature information. SAR raw data have no direct applications because the desired results cannot be interpreted or described, so processing algorithms are used to generate SAR images where the surface of interest can be observed.
The range-Doppler algorithm [
10], Chirp Scaling algorithm [
11], and Omega-k algorithm [
12] operate in the frequency domain and are the most widely used algorithms in synthetic aperture radar digital signal processing to generate SAR images. Time-domain focusing algorithms such as the backprojection algorithm [
13] generate better quality SAR images compared with focusing algorithms operating in the frequency domain [
14]; however, the advantage of frequency-domain focusing algorithms is that their computational cost is lower than that of the time-domain focusing algorithms [
12,
14]; therefore, frequency-domain focusing algorithms can be further improved. On the other hand, when the speed of the SAR platform is high or close to supersonic, hypersonic, and relativistic speeds, the Doppler factor is of the utmost importance. In recent research, the Doppler factor was only added in focusing algorithms for linear frequency modulated continuous wave (LFM-CW) SAR radars, obtaining good results [
15]; however, the Doppler factor was not added in focusing algorithms for SAR (pulsed) radars installed on board a space platform and it is not known how the Doppler factor affects the SAR imaging approach. Therefore, in this paper, the Omega-k algorithm was chosen because it has a better performance than the Chirp scaling algorithm and the range-Doppler algorithm at large synthetic apertures [
12,
16], as well as to evaluate whether the Doppler factor has positive or negative effects on SAR raw signal processing.
In [
17], the precise version of the Omega-k algorithm was developed for LFM-CW SAR radars, because this Omega-k algorithm only worked for pulsed SAR radars; as a result, a modified Omega-k algorithm for continuous wave radars was obtained, generating a good LFM-CW SAR image quality by distinguishing surfaces better than the range-Doppler algorithm; therefore, in this paper, we modify the Omega-k algorithm by adding motion compensation and Doppler factor for LFM-CW SAR radars to improve the focusing of the SAR images. Then, we present the structure of this paper and, in
Section 1, we briefly describe a synthetic aperture radar, as well as its applications, SAR raw data structure, SAR raw signal processing algorithms, and problems. In
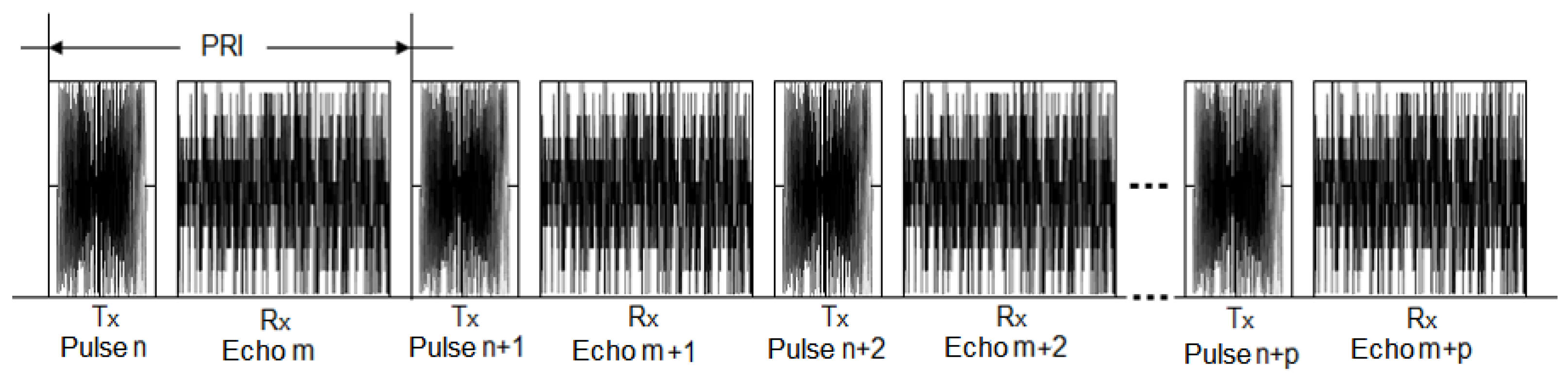
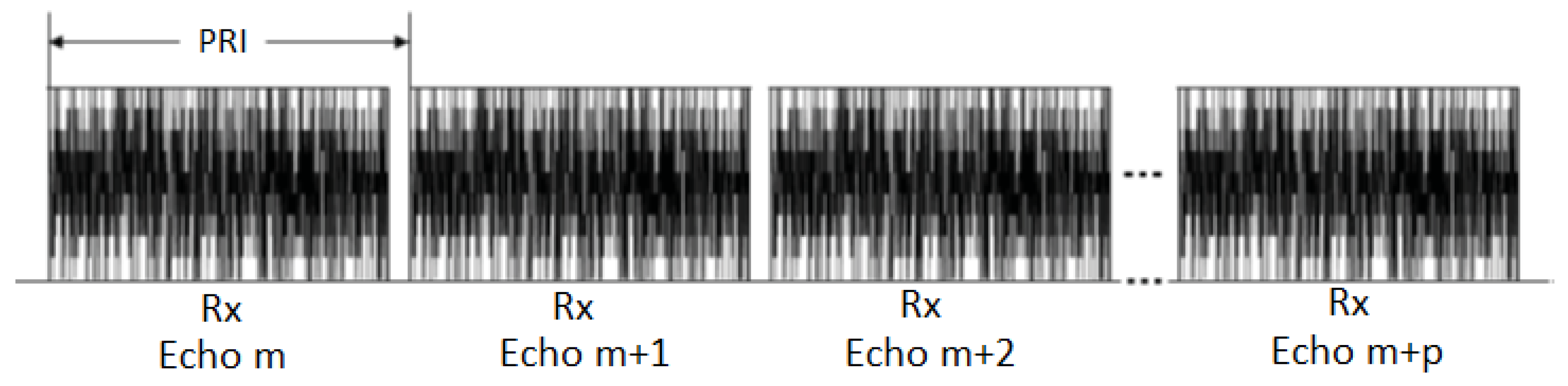
Section 2, we explain the SAR geometry, through a demonstration of the mathematical equation of the SAR raw data and the structure of continuous wave and pulsed SAR raw data. Then, in
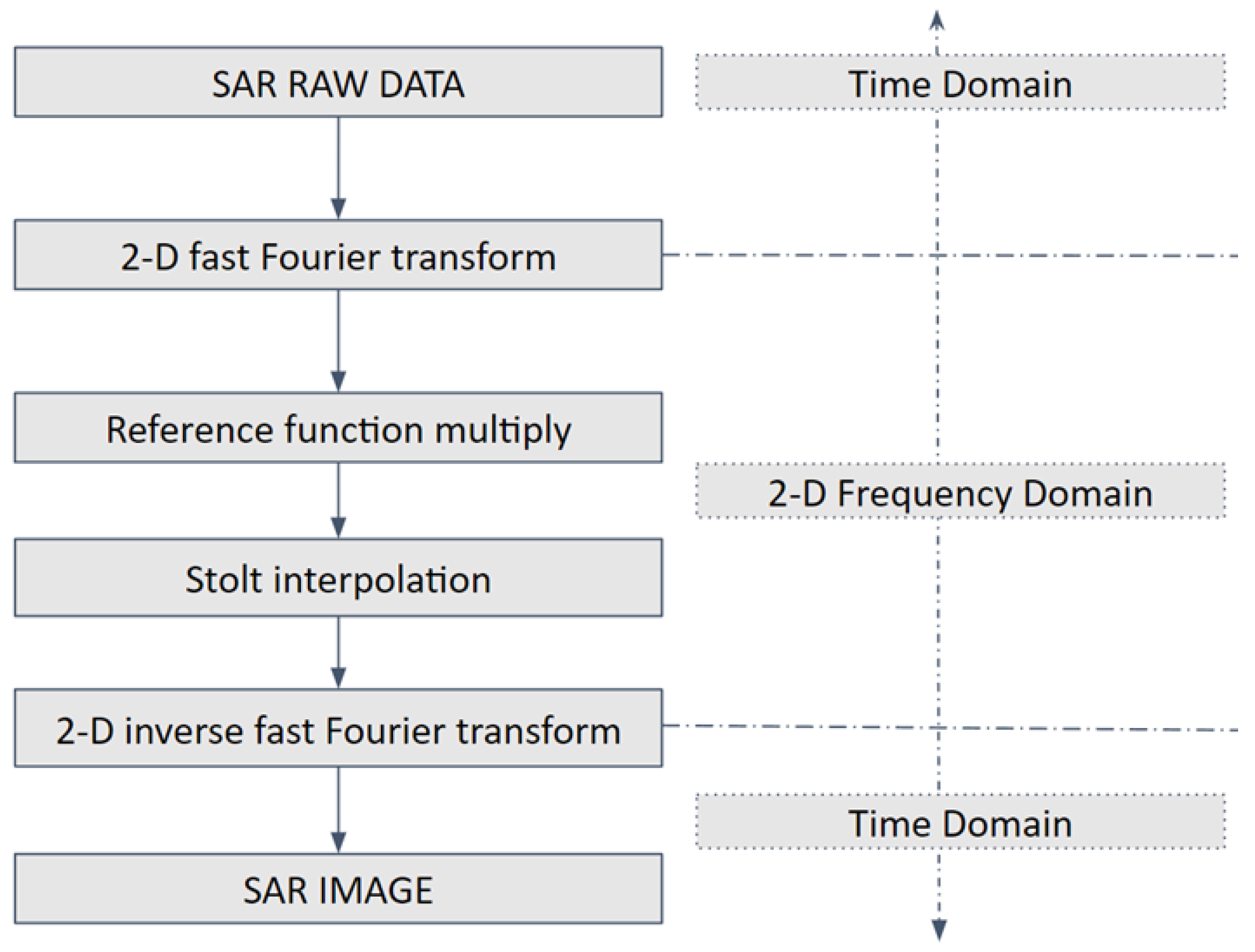
Section 3, we transform the SAR raw data from the time domain to the two-dimensional frequency domain. In
Section 4, we develop SAR raw signal processing using the Omega-k algorithm for continuous wave and pulsed SAR radars. Then, in
Section 5, the results are shown, that is, testing the Omega-k algorithm using simulated and real SAR raw data. Finally,
Section 6 shows the conclusions and recommendations.
6. Conclusions
The SAR and LFM-CW SAR raw signals were transformed by adding the Doppler factor using the two-dimensional Fourier transform from the time domain to the two-dimensional Fourier domain, then the Omega-k algorithm was modified by adding the Doppler factor for continuous and pulsed wave synthetic aperture radars.
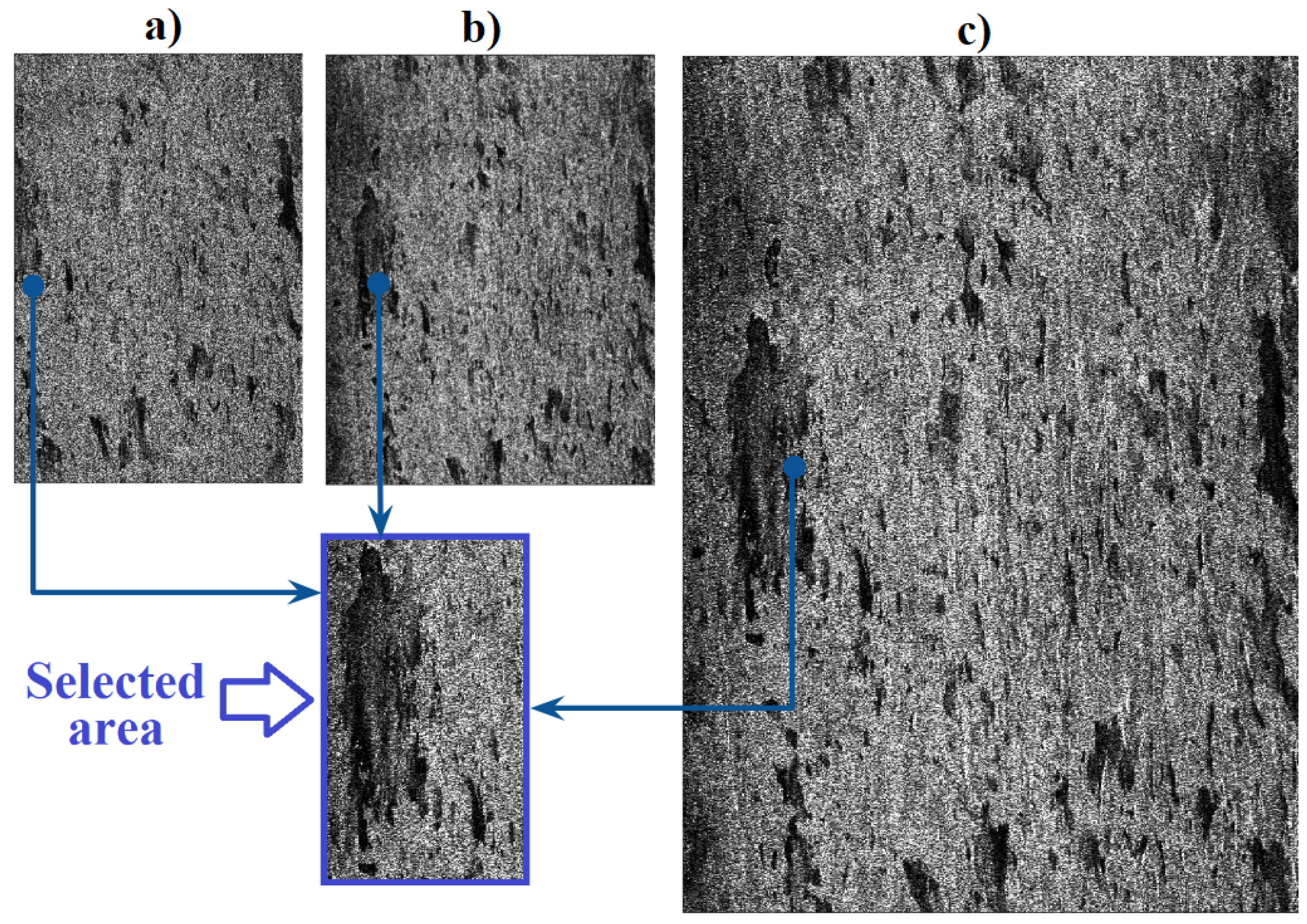
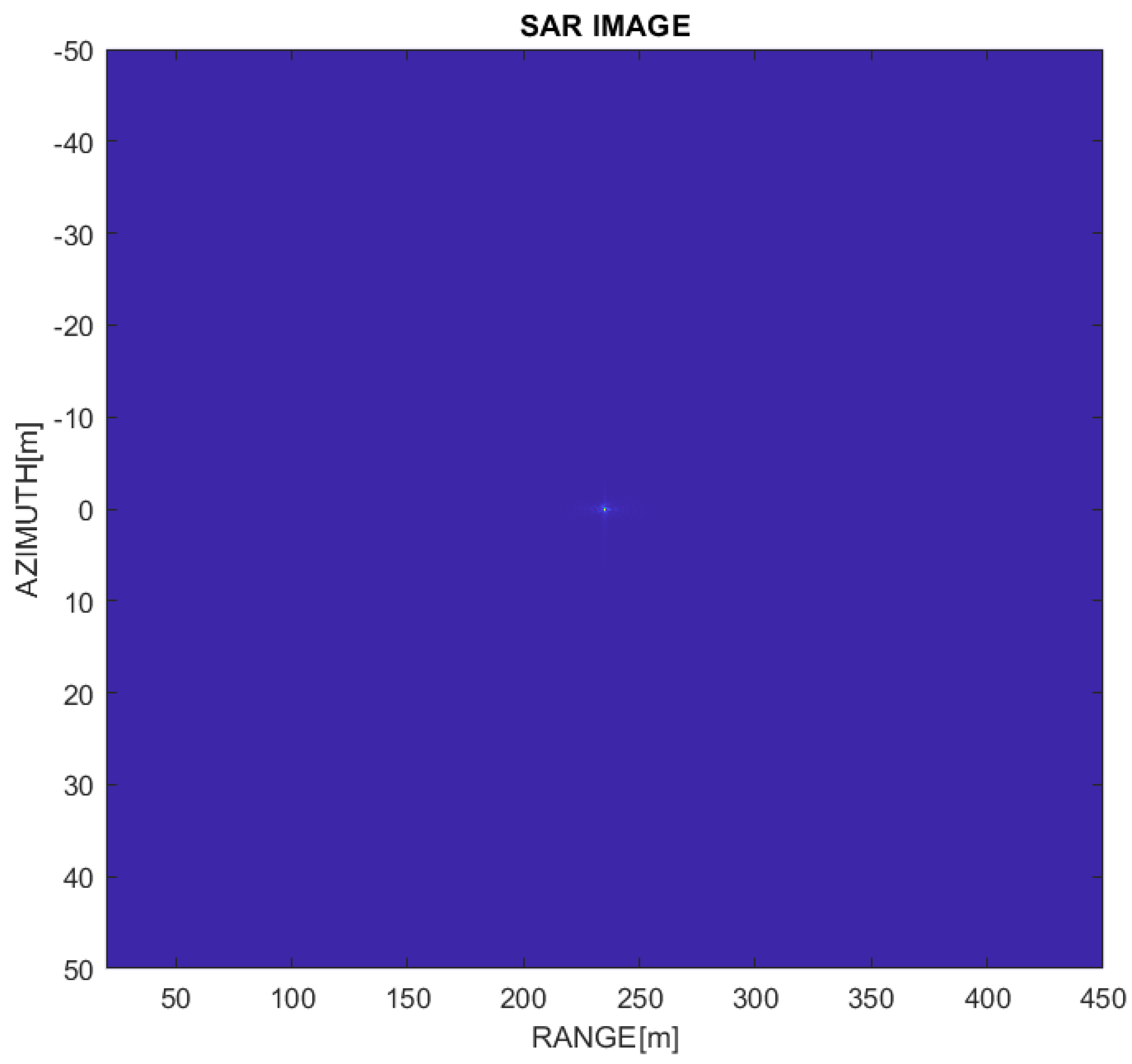
The modified Omega-k algorithm for SAR (pulsed) systems was validated using simulated SAR raw data from a point target; additionally, this modified Omega-k algorithm was validated with real SAR raw data that were obtained by the ERS-2 satellite through its SAR radar (pulsed). On the other hand, in the modified Omega-k algorithm for LFM-CW SAR systems, in addition to adding the Doppler factor, the SAR system aerial platform movement compensation was added. This Omega-k algorithm was validated with simulated SAR raw data and real SAR raw data obtained by the MicroASAR system that was installed on board an unmanned aerial vehicle.
SAR images generated by the modified Omega-k algorithm for continuous wave and pulsed SAR systems have pixels with complex values and have remote observation information of the surface of interest. These SAR images had range and azimuth directions, and these SAR images obtained with the range-Doppler algorithm and the modified Omega-k algorithm were compared, obtaining similar results and thus validating these proposed Omega-k algorithms. On the other hand, the modified Omega-k algorithm for the LFM-CW SAR system showed better results because of residual video phase elimination, and Doppler factor and motion compensation were added.
As a contribution to the scientific community, the Doppler factor was successfully added to the Omega-k algorithm for the pulsed SAR system, generating good quality SAR images. For future work, the application of the Omega-k algorithm is recommended with the addition of the Doppler factor for bistatic and circular synthetic aperture radars. It is also recommended that the effects of adding the Doppler factor in the range-Doppler algorithm and the chirp scaling algorithm in the approach of SAR raw data obtained on SAR platforms with high velocities are examined.

 ,
, 
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}