
Fast Numerical Reconstruction of Integral Imaging Based on a Determined Interval Mapping


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
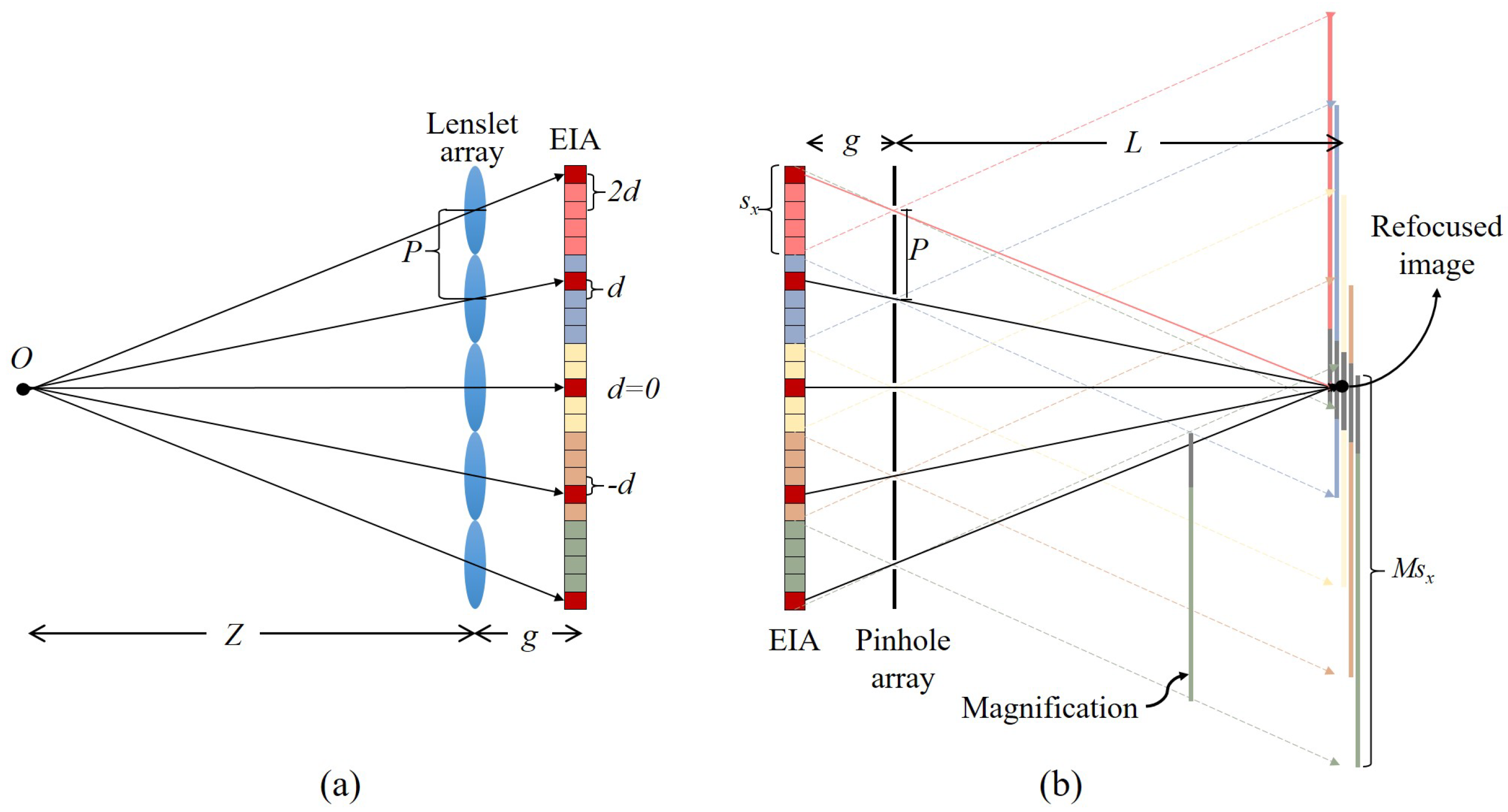
2. Numerical Reconstruction of the Integral Imaging
2.1. Conventional Numerical Reconstruction Method
2.2. Proposed Numerical Reconstruction
2.3. Position Error Compensation and Adaptive Normalization
3. Results
3.1. Numerical Experiment
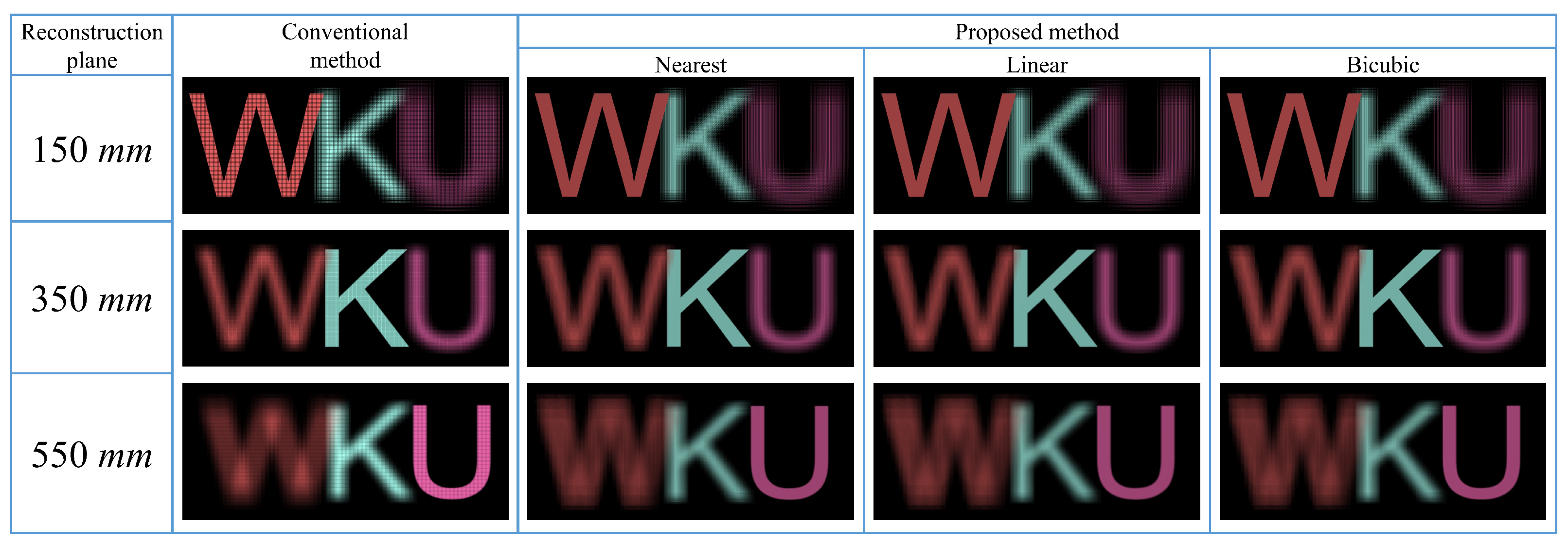
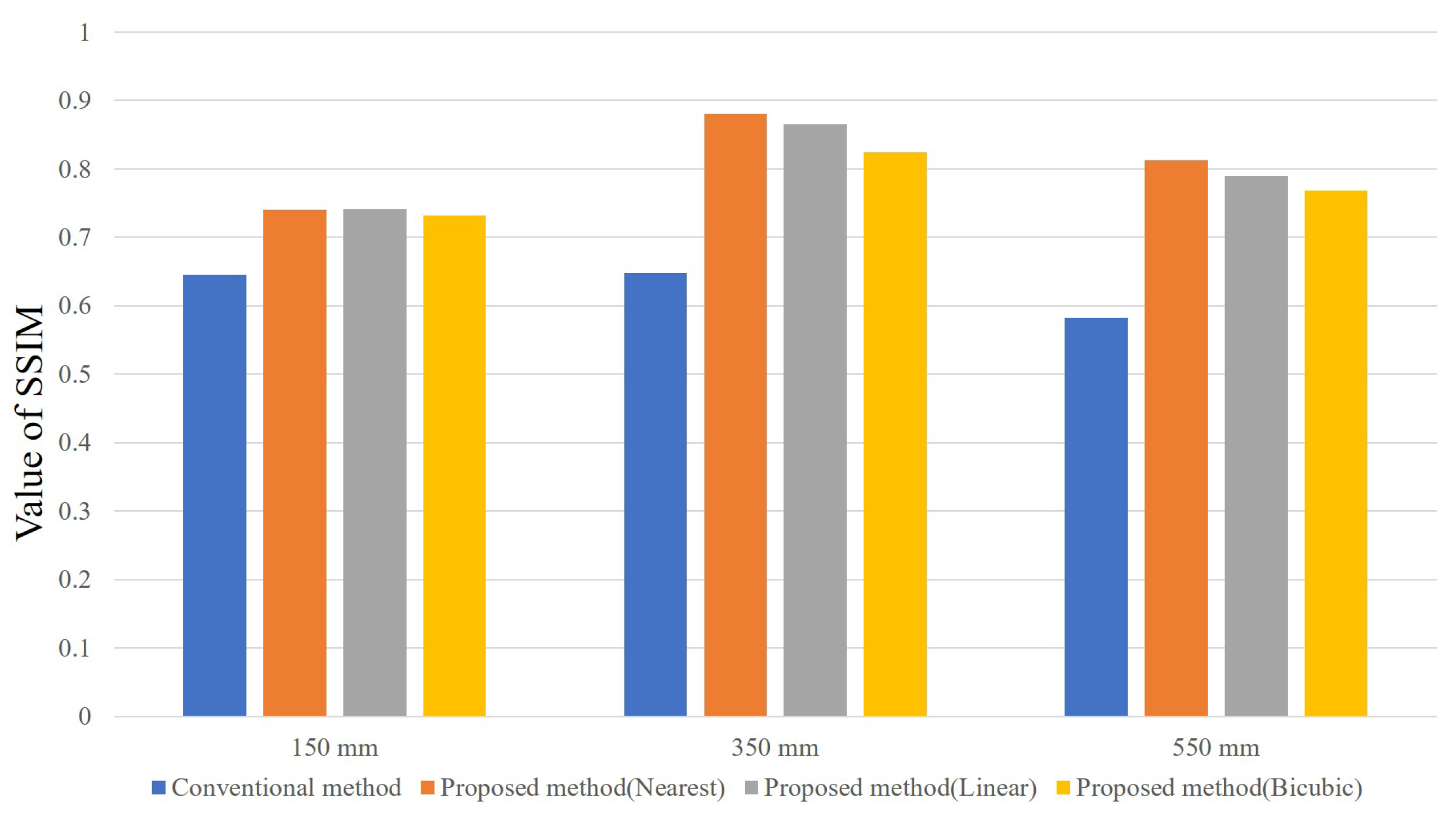
3.2. Quality Comparison of the Reconstructed Image
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Okano, F.; Hoshino, H.; Arai, J.; Yuyama, I. Real-time pickup method for a three-dimensional image based on integral photography. Appl. Opt. 1997, 36, 1598–1603. [Google Scholar] [CrossRef] [PubMed]
- Lee, B.; Jung, S.; Park, J.H. Viewing-angle-enhanced integral imaging by lens switching. Opt. Lett. 2002, 27, 818–820. [Google Scholar] [CrossRef]
- Stern, A.; Javidi, B. Three-dimensional image sensing and reconstruction with time-division multiplexed computational integral imaging. Appl. Opt. 2003, 42, 7036–7042. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Piao, Y.; Xing, L.; Zhang, M.; Lee, M.C. Resolution enhanced computational integral imaging reconstruction by using boundary folding mirrors. J. Opt. Soc. Korea 2016, 20, 363–367. [Google Scholar] [CrossRef] [Green Version]
- Choi, H.M.; Choi, J.G.; Kim, E.S. Off-axis multi-projection integral imaging with calibrated elemental image arrays based on pixel-position mapping. Ict Express 2018, 4, 112–117. [Google Scholar] [CrossRef]
- Yan, Z.; Yan, X.; Huang, Y.; Jiang, X.; Yan, Z.; Liu, Y.; Mao, Y.; Qu, Q.; Li, P. Characteristics of the holographic diffuser in integral imaging display systems: A quantitative beam analysis approach. Opt. Lasers Eng. 2021, 139, 106484. [Google Scholar] [CrossRef]
- Qin, Z.; Zhang, Y.; Yang, B.R. Interaction between sampled rays’ defocusing and number on accommodative response in integral imaging near-eye light field displays. Opt. Express 2021, 29, 7342–7360. [Google Scholar] [CrossRef]
- Wang, W.; Chen, G.; Weng, Y.; Weng, X.; Zhou, X.; Wu, C.; Guo, T.; Yan, Q.; Lin, Z.; Zhang, Y. Large-scale microlens arrays on flexible substrate with improved numerical aperture for curved integral imaging 3D display. Sci. Rep. 2020, 10, 1–9. [Google Scholar] [CrossRef]
- Choi, J.G.; Choi, H.M.; Hwang, Y.S.; Kim, E.S. Real-time sensing and three-dimensional display of far outdoor scenes based on asymmetric integral imaging. Opt. Lasers Eng. 2017, 94, 44–57. [Google Scholar] [CrossRef]
- Takaki, Y.; Yamaguchi, Y. Flat-panel see-through three-dimensional display based on integral imaging. Opt. Lett. 2015, 40, 1873–1876. [Google Scholar] [CrossRef]
- Hong, S.H.; Jang, J.S.; Javidi, B. Three-dimensional volumetric object reconstruction using computational integral imaging. Opt. Express 2004, 12, 483–491. [Google Scholar] [CrossRef] [PubMed]
- Shin, D.H.; Kim, E.S.; Lee, B. Computational reconstruction of three-dimensional objects in integral imaging using lenslet array. Jpn. J. Appl. Phys. 2005, 44, 8016. [Google Scholar] [CrossRef]
- Arimoto, H.; Javidi, B. Integral three-dimensional imaging with digital reconstruction. Opt. Lett. 2001, 26, 157–159. [Google Scholar] [CrossRef]
- Frauel, Y.; Javidi, B. Digital three-dimensional image correlation by use of computer-reconstructed integral imaging. Appl. Opt. 2002, 41, 5488–5496. [Google Scholar] [CrossRef] [PubMed]
- Hong, S.H.; Javidi, B. Improved resolution 3D object reconstruction using computational integral imaging with time multiplexing. Opt. Express 2004, 12, 4579–4588. [Google Scholar] [CrossRef]
- Li, H.; Wang, S.; Zhao, Y.; Wei, J.; Piao, M. 3D view image reconstruction in computational integral imaging using scale invariant feature transform and patch matching. Opt. Express 2019, 27, 24207–24222. [Google Scholar] [CrossRef]
- Bae, J.; Yoo, H. Review and Comparison of Computational Integral Imaging Reconstruction. Int. J. Appl. Eng. Res. 2019, 14, 250–253. [Google Scholar]
- Cho, M.; Javidi, B. Computational reconstruction of three-dimensional integral imaging by rearrangement of elemental image pixels. J. Disp. Technol. 2009, 5, 61–65. [Google Scholar] [CrossRef]
- Shin, D.H.; Lee, B.; Kim, E.S. Improved Viewing Quality of 3-D Images in Computational Integral Imaging Reconstruction Based on Lenslet Array Model. ETRI J. 2006, 28, 521–524. [Google Scholar] [CrossRef]
- Shin, D.H.; Yoo, H. Image quality enhancement in 3D computational integral imaging by use of interpolation methods. Opt. Express 2007, 15, 12039–12049. [Google Scholar] [CrossRef]
- Inoue, K.; Lee, M.C.; Javidi, B.; Cho, M. Improved 3D integral imaging reconstruction with elemental image pixel rearrangement. J. Opt. 2018, 20, 025703. [Google Scholar] [CrossRef]
- Inoue, K.; Cho, M. Visual quality enhancement of integral imaging by using pixel rearrangement technique with convolution operator (CPERTS). Opt. Lasers Eng. 2018, 111, 206–210. [Google Scholar] [CrossRef]
- Kim, H.; Lee, S.; Ryu, T.; Yoon, J. Superresolution of 3-D computational integral imaging based on moving least square method. Opt. Express 2014, 22, 28606–28622. [Google Scholar] [CrossRef] [PubMed]
- Yoo, H.; Jang, J.Y. Intermediate elemental image reconstruction for refocused three-dimensional images in integral imaging by convolution with δ-function sequences. Opt. Lasers Eng. 2017, 97, 93–99. [Google Scholar] [CrossRef]
- Bae, K.H.; Kim, E.S. New disparity estimation scheme based on adaptive matching windows for intermediate view reconstruction. Opt. Eng. 2003, 42, 1778–1786. [Google Scholar] [CrossRef]
- Shin, D.H.; Yoo, H. Scale-variant magnification for computational integral imaging and its application to 3D object correlator. Opt. Express 2008, 16, 8855–8867. [Google Scholar] [CrossRef]
- Hwang, D.C.; Shin, D.H.; Kim, S.C.; Kim, E.S. Depth extraction of three-dimensional objects in space by the computational integral imaging reconstruction technique. Appl. Opt. 2008, 47, D128–D135. [Google Scholar] [CrossRef]
- Llavador, A.; Sánchez-Ortiga, E.; Saavedra, G.; Javidi, B.; Martínez-Corral, M. Free-depths reconstruction with synthetic impulse response in integral imaging. Opt. Express 2015, 23, 30127–30135. [Google Scholar] [CrossRef] [Green Version]
- Jang, J.Y.; Ser, J.I.; Cha, S.; Shin, S.H. Depth extraction by using the correlation of the periodic function with an elemental image in integral imaging. Appl. Opt. 2012, 51, 3279–3286. [Google Scholar] [CrossRef]
- Wu, C.; McCormick, M.; Aggoun, A.; Kung, S.Y. Depth mapping of integral images through viewpoint image extraction with a hybrid disparity analysis algorithm. J. Disp. Technol. 2008, 4, 101–108. [Google Scholar]
- Xiao, X.; Daneshpanah, M.; Javidi, B. Occlusion removal using depth mapping in three-dimensional integral imaging. J. Disp. Technol. 2012, 8, 483–490. [Google Scholar] [CrossRef]
- Shen, X.; Markman, A.; Javidi, B. Three-dimensional profilometric reconstruction using flexible sensing integral imaging and occlusion removal. Appl. Opt. 2017, 56, D151–D157. [Google Scholar] [CrossRef] [PubMed]
- Ryu, T.; Lee, B.; Lee, S. Mutual constraint using partial occlusion artifact removal for computational integral imaging reconstruction. Appl. Opt. 2015, 54, 4147–4153. [Google Scholar] [CrossRef]
- Yoo, H. Depth extraction for 3D objects via windowing technique in computational integral imaging with a lenslet array. Opt. Lasers Eng. 2013, 51, 912–915. [Google Scholar] [CrossRef]
- Zhang, M.; Piao, Y.; Wei, C.; Si, Z. Occlusion removal based on epipolar plane images in integral imaging system. Opt. Laser Technol. 2019, 120, 105680. [Google Scholar] [CrossRef]
- Yoo, H.; Shin, D.; Cho, M. Improved depth extraction method of 3D objects using computational integral imaging reconstruction based on multiple windowing techniques. Opt. Lasers Eng. 2015, 66, 105–111. [Google Scholar] [CrossRef]
- Yi, F.; Moon, I.; Lee, J.A.; Javidi, B. Fast 3D computational integral imaging using graphics processing unit. J. Disp. Technol. 2012, 8, 714–722. [Google Scholar] [CrossRef]
- Hong, S.; Incardona, N.; Inoue, K.; Cho, M.; Saavedra, G.; Martinez-Corral, M. GPU-accelerated integral imaging and full-parallax 3D display using stereo–plenoptic camera system. Opt. Lasers Eng. 2019, 115, 172–178. [Google Scholar] [CrossRef]
- Park, J.H.; Kim, Y.; Kim, J.; Min, S.W.; Lee, B. Three-dimensional display scheme based on integral imaging with three-dimensional information processing. Opt. Express 2004, 12, 6020–6032. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [Green Version]
- Alam, M.; Kwon, K.C.; Erdenebat, M.U.; Abbass, M.Y.; Kim, N. Super-resolution enhancement method based on generative adversarial network for integral imaging microscopy. Sensors 2021, 21, 2164. [Google Scholar] [CrossRef] [PubMed]
- Huo, W.; Sang, X.; Xing, S.; Guan, Y.; Li, Y. Backward ray tracing based rectification for real-time integral imaging display system. Opt. Commun. 2020, 458, 124752. [Google Scholar] [CrossRef]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, H.; Kim, N.; Kang, H. Fast Numerical Reconstruction of Integral Imaging Based on a Determined Interval Mapping. Appl. Sci. 2023, 13, 6942. https://doi.org/10.3390/app13126942
Choi H, Kim N, Kang H. Fast Numerical Reconstruction of Integral Imaging Based on a Determined Interval Mapping. Applied Sciences. 2023; 13(12):6942. https://doi.org/10.3390/app13126942
Chicago/Turabian StyleChoi, Heemin, Nam Kim, and Hoonjong Kang. 2023. "Fast Numerical Reconstruction of Integral Imaging Based on a Determined Interval Mapping" Applied Sciences 13, no. 12: 6942. https://doi.org/10.3390/app13126942