1. Introduction
Parallel-axis gearboxes are one of the most common components in mechanical transmissions and are widely utilized in various rotating mechanical equipment, serving as crucial transmission structures in several fields such as aerospace, metallurgy, chemical engineering, shipping, and the automotive industry [
1]. However, due to high loads and severe operating conditions, gearboxes are prone to various issues including pitting, wear, cracking, and even tooth breakage. Improper selection of surface coatings and lubricants can also accelerate gear wear, potentially leading to accidents [
2]. To prevent accidents, it is crucial to conduct research on the durability, noise, and vibration of gears. Durability-related studies primarily focus on dynamic tooth forces and dynamic stress coefficients, while noise studies concentrate on dynamic transmission errors and gearbox vibration [
3]. Vibration signals are easier to collect and utilize for fault diagnosis, providing an effective means to prevent accidents.
Due to the structural characteristics and complex operating conditions of parallel-axis gearboxes, gear meshing can result in impact or collision when gears experience faults [
4]. This non-steady force or torque input leads to the nonstationary nature of vibration signals, which exhibit nonlinear and nonstationary properties [
5]. Therefore, preprocessing of raw signals is necessary before feature extraction. In 1998, Huang et al. [
6] introduced the Hilbert–Huang transform (HHT) algorithm, incorporating the empirical mode decomposition (EMD) algorithm, and successfully applied it to the decomposition of mechanical vibration signals with certain effectiveness. However, EMD has drawbacks such as mode mixing and endpoint effects [
7,
8]. Subsequently, Dragomiretskiy proposed variational mode decomposition (VMD) [
9], an adaptive signal processing method. This method’s decomposition approach differs from EMD, using a non-recursive variational mode that effectively addresses endpoint effects and mode mixing issues. Due to its ability to determine the number of decomposed modes and having mathematical theoretical support, VMD is widely applied in the field of fault diagnosis [
10]. However, a drawback of this method is that the decomposition quantity
K and penalty factor
α significantly impact the decomposition results, necessitating further improvements to the VMD algorithm. Tang et al. [
11] explained VMD principles and optimized it using the particle swarm optimization (PSO) algorithm, applying it to fault diagnosis. Test results indicate that this method can identify faults more rapidly and accurately. However, the PSO algorithm is sensitive to population initialization, and significant differences in the initial population distribution may affect the quality of feature information extraction methods.
The effectiveness of feature extraction methods determines the success of fault diagnosis, especially in the process of extracting features from nonlinear and non-stationary signals. Entropy, as a sensitive feature, is widely applied in the field of fault diagnosis [
12]. Analyzing signals using entropy helps measure signal complexity [
13]. Li Yuxing et al. [
14] extracted permutation entropy for four types of ship signals as a fusion feature vector, inputting it into a support vector machine (SVM) model for classification and recognition. Experimental results show that this method has a higher recognition rate compared to existing methods. However, a single entropy characteristic may not fully reflect the feature information of the signal. Therefore, it is necessary to extract different entropy features and time–frequency domain features. However, when the extracted feature dimensions are high, they may contain redundant information. Therefore, dimensionality reduction methods are needed for secondary feature extraction to eliminate redundant features. Traditional dimensionality reduction methods such as principal component analysis (PCA) do not perform well on nonlinear structural data, and local linear embedding (LLE) can only preserve the original manifold structure of the data. On the other hand, t-distributed stochastic neighbor embedding (t-SNE) not only has excellent dimensionality reduction capabilities for nonlinear data but also helps separate and cluster fault types.
With the development of machine learning, population-based algorithms have been widely applied to VMD due to their advantages in optimization algorithm effectiveness. Compared to existing algorithms, the cockroach optimization algorithm (DBO) has stronger optimization capabilities and faster convergence speed. However, its structure still needs further improvement to meet practical needs. Therefore, addressing the gearbox fault diagnosis problem in parallel-axis gearboxes, this paper proposes a diagnostic method based on the improved cockroach optimization algorithm for optimizing VMD, feature extraction, and combination with t-SNE. This algorithm optimizes VMD through IDBO to determine the number of decomposed intrinsic mode functions (IMFs) and the optimal penalty factor. It extracts features such as time–frequency domain, permutation entropy, fuzzy entropy, and sample entropy as feature vectors. As gear fault signals are nonlinear vibration signals, support vector machines (SVMs) excel in handling nonlinear problems, aiding in capturing these complex features. Therefore, SVM is chosen as the fault classifier to enhance the accuracy of fault diagnosis. Through experiments, the feasibility and practicality of the proposed method are verified.
4. Fault Diagnosis Process for Parallel-Axis Gearboxes Based on WOA-VMD and t-SNE
4.1. Optimizing VMD with IDBO
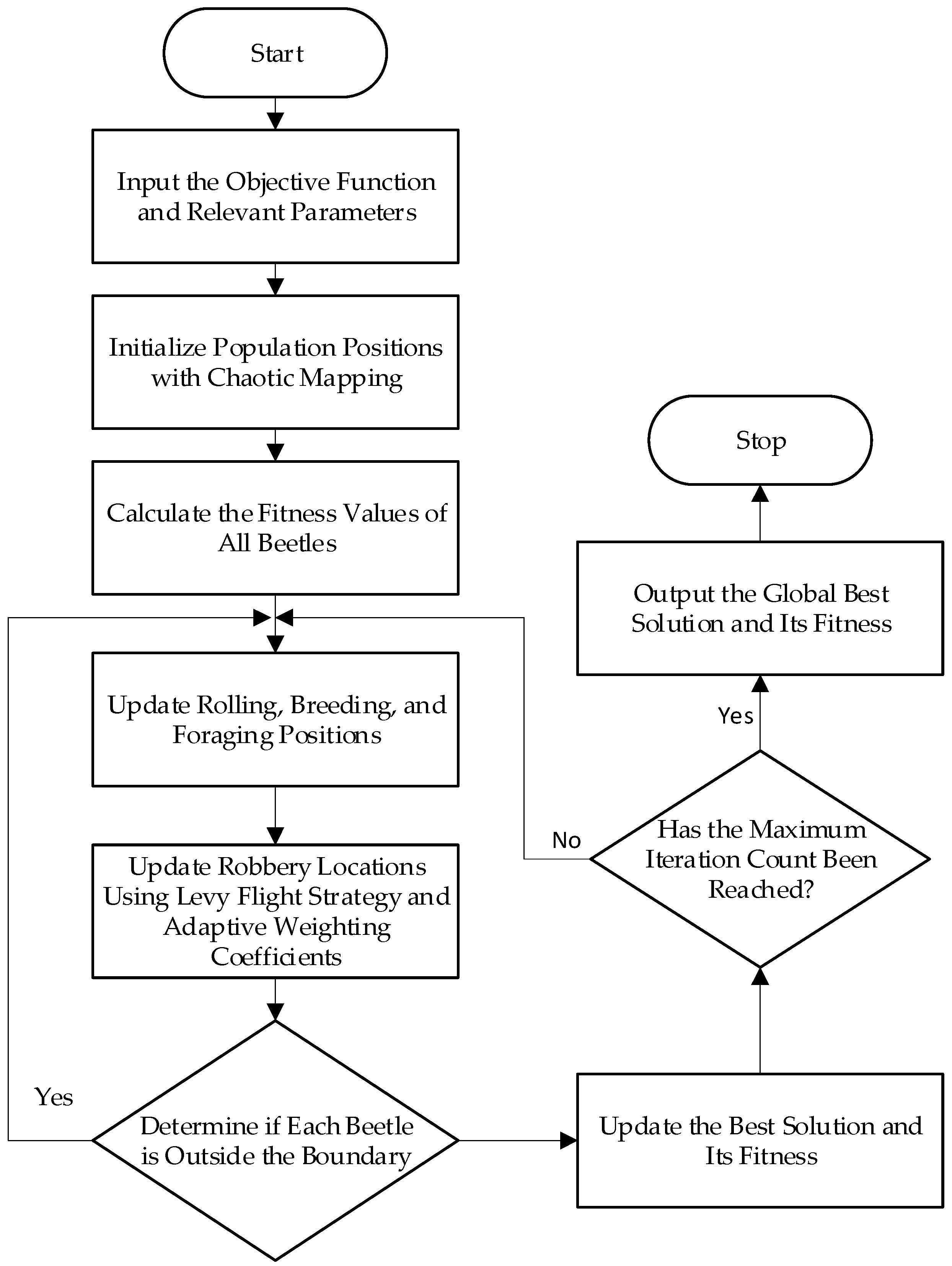
The IDBO is utilized to optimize the number of modes (K) and penalty factor (α) in variational mode decomposition (VMD). The value of K significantly affects the effectiveness of the original data decomposition. A K value that is too large may lead to excessive decomposition, generating some ineffective intrinsic mode functions (IMFs), while a K value that is too small may result in insufficient decomposition of the original signal. The penalty factor α, when too large, can cause loss of frequency band signals, and, conversely, can introduce information redundancy. Therefore, an optimal combination of [K, α] is essential. In this study, the IDBO algorithm is employed to optimize the parameters of VMD. The optimization process aims to minimize the envelope entropy, which serves as the fitness function. Envelope entropy reflects the sparsity characteristics of the original signal. When there is more noise in the IMF and less feature information, the envelope entropy value is larger, and vice versa. The optimization process is as follows:
Set the IDBO population size and the number of iterations, and define a suitable range for [K, α] values for VMD decomposition. Ensure that the range is not too narrow to avoid losing essential feature information in the modal components.
Use VMD to decompose the vibration signal from the gearbox, resulting in several intrinsic mode functions (IMFs).
Calculate the fitness function value for each set of [K, α] values and continually update the iterations to find the best fitness function value.
Determine if the iteration is completed, i.e., whether the maximum number of iterations has been reached. When the maximum number of iterations is reached, terminate the iteration and save the optimal parameters [K, α].
4.2. Kurtosis-Based Signal Reconstruction
Kurtosis reflects the sharpness or peakedness of a signal waveform, and due to the varying impulsive components contained in each IMF, their corresponding kurtosis values are different [
24]. When the kurtosis value K is 3, it corresponds to the normal kurtosis value for a Gaussian distribution curve, indicating that the IMF contains more fault-related information. Therefore, selecting kurtosis values greater than 3 implies a significant presence of signal impulses in the IMF, indicating that the vibration deviates from a normal state. This feature is suitable for identifying signal anomalies when faults occur.
4.3. Feature Extraction
Time domain features of vibration signals can reflect the overall state of the gearbox and can be used for fault detection and trend forecasting. Frequency domain features are useful for identifying the location and cause of faults. The combination of time and frequency domain feature information can effectively determine the current condition of the gears. In this paper, a variety of time domain and frequency domain feature parameters are selected to form the fault information feature matrix.
Information entropy describes the degree of uncertainty in a system and is used to analyze the complexity of a signal. Single entropy characteristics may not fully reflect the signal’s feature information. Therefore, multiple entropy values are extracted for each IMF to ensure data completeness and diagnostic accuracy. This paper extracts permutation entropy, fuzzy entropy, and sample entropy.
According to the above introduction, the specific steps for gear fault diagnosis based on IDBO-VMD decomposition, selection of IMF features, and t-SNE are as follows:
Obtain vibration signals for various states using an accelerometer sensor.
Use the IDBO algorithm to search the optimal parameters of VMD for each state. After parameter optimization, apply VMD to decompose the signals from various states, resulting in K IMF components.
Apply the kurtosis criterion to filter the obtained IMF components, selecting the best IMF.
Perform feature extraction on the chosen IMF, recombine the extracted 20 feature values to create a new feature vector.
Utilize the t-SNE method for dimensionality reduction, obtaining a two-dimensional feature vector.
Input the feature vectors of the training dataset into an SVM for training, creating an SVM classification model.
Input the feature vectors of the testing dataset into the trained SVM model to perform fault diagnosis.
5. Simulation Testing
For testing the effectiveness of the proposed algorithm improvements, grey wolf optimization (GWO), DBO, the sparrow search algorithm (SSA), and IDBO were selected for comparative optimization on test functions. The test functions are listed in
Table 1, where
F1–
F3 are single-peak functions, and
F4–
F6 are multipeak functions, all with a dimensionality of 30. To ensure fair testing, each algorithm utilized a population size of 30, a maximum iteration count of 500, and was independently tested on the six test functions 10 times to obtain average fitness convergence curves, evaluating their convergence speed. The experimental results are presented in
Table 1, using criteria such as the best value, average value, and standard deviation for evaluation.
From
Figure 3, it can be observed that under the same parameter settings, IDBO exhibits a faster convergence speed compared to DBO. In
Figure 3c, the convergence speed of IDBO is slightly lower than DBO in the early stages, but it shows improvement in solution accuracy, and its average optimization capability is more stable. A comparison with GWO and SSA also reveals that DBO has good convergence speed and optimization capability. When comparing these four algorithms simultaneously, it is evident that IDBO’s convergence speed is significantly higher than the other three. Moreover, it requires the least number of iterations. As the iteration count increases, the convergence curves of DBO, the SSA, and GWO gradually stabilize, and optimization accuracy starts to decrease. This indicates that the three improvement strategies applied to IDBO result in a noticeable enhancement in convergence speed and an improvement in global search capability, showcasing the advantage in local optimization capability.
Table 2 reveals that IDBO did not find the optimal solution only in the case of testing the
F6 function. Moreover, its performance in terms of average and standard deviation is similar to DBO. However, as shown in
Figure 3, IDBO demonstrates the fastest convergence speed, swiftly locating the optimal values and exploring them in-depth, showcasing higher optimization accuracy. For the
F1–
F5 tests, IDBO outperforms other algorithms, showing significant improvements in average optimization capability, precision, and standard deviation. In summary, in the convergence curves of most test functions, the IDBO algorithm exhibits excellent performance. It maintains an absolute advantage in convergence speed while achieving high convergence accuracy, reflecting a reasonable balance between global search capability and local development capability.
7. Conclusions
In this paper, we proposed a novel approach for gearbox fault diagnosis. We enhanced the DBO algorithm and compared it with DBO, the SSA, and GWO. The introduced IDBO algorithm demonstrated excellent performance, whether applied to benchmark functions or utilized in optimizing VMD. The algorithm exhibited strong global optimization capabilities and convergence performance. Additionally, it boasts fast training speeds, straightforward operations, and high optimization accuracy, showcasing its efficiency in the context of mechanical applications.
Experimental results demonstrate that the VMD optimized using IDBO effectively suppresses mode mixing. By employing the IDBO-VMD and t-SNE feature extraction methods, the low-dimensional vectors obtained were input to an SVM for gearbox fault diagnosis, achieving an accuracy rate of 100%. Compared to traditional methods, this approach exhibits characteristics such as high fault recognition accuracy and stable performance, making it an effective new method for gearbox fault diagnosis. Currently, the proposed method has only been applied to gearbox diagnosis, and future work will involve extending its application to diagnose faults in other rotating machinery, thus validating its practicality and generality.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}