
Convolved Feature Vector Based Adaptive Fuzzy Filter for Image De-Noising
 , , , and
, , , and
Abstract
:Featured Application
Abstract
1. Introduction
2. Noise Model
3. Basic Reviews
3.1. Median Filter
3.2. Deviation from a Reference Point
3.3. Why Convolved Feature Vector (CFV)?
4. Proposed Methodology: Convolved Feature Vector Based Fuzzy Filter
4.1. Noise Detection Mechanism
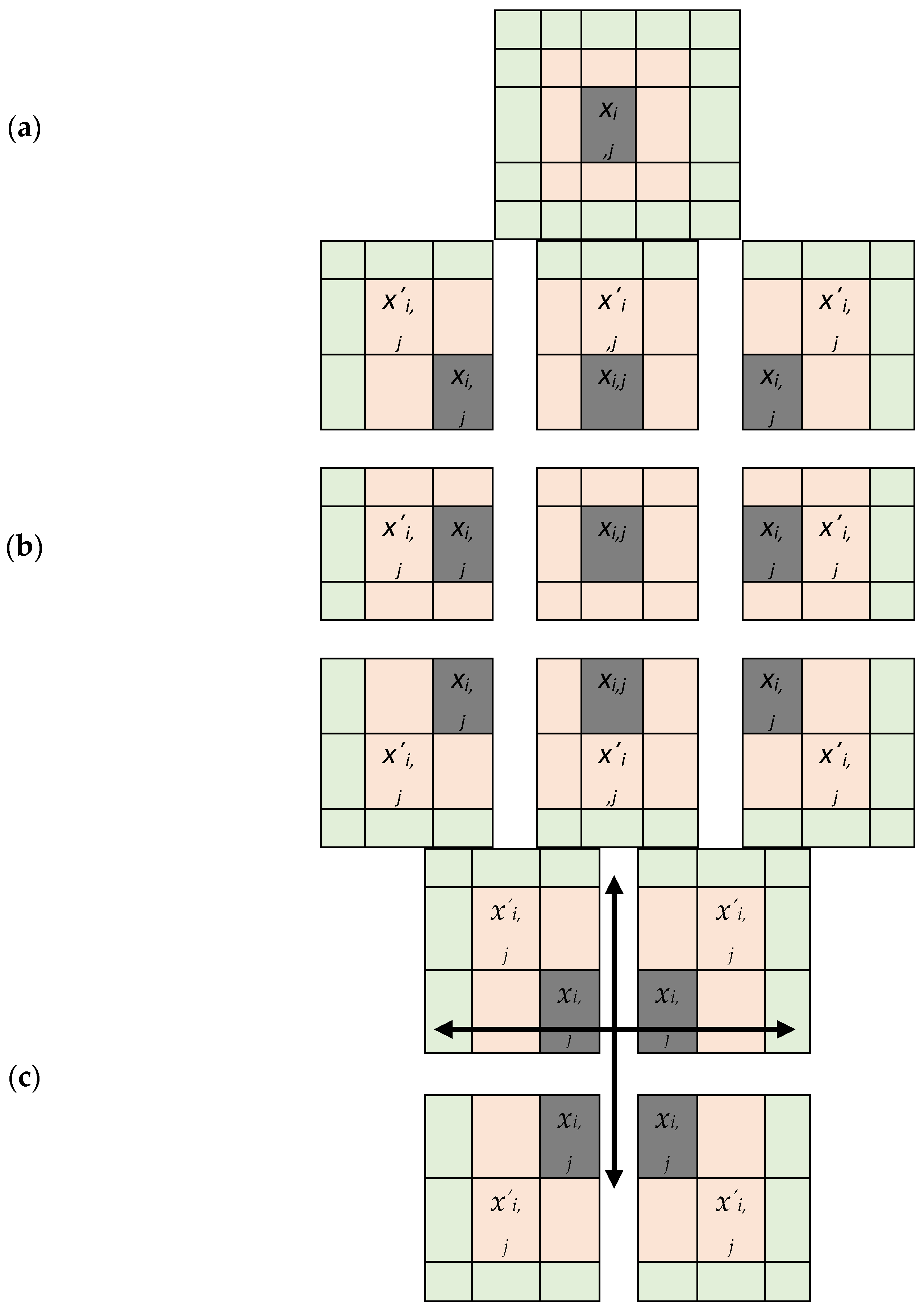
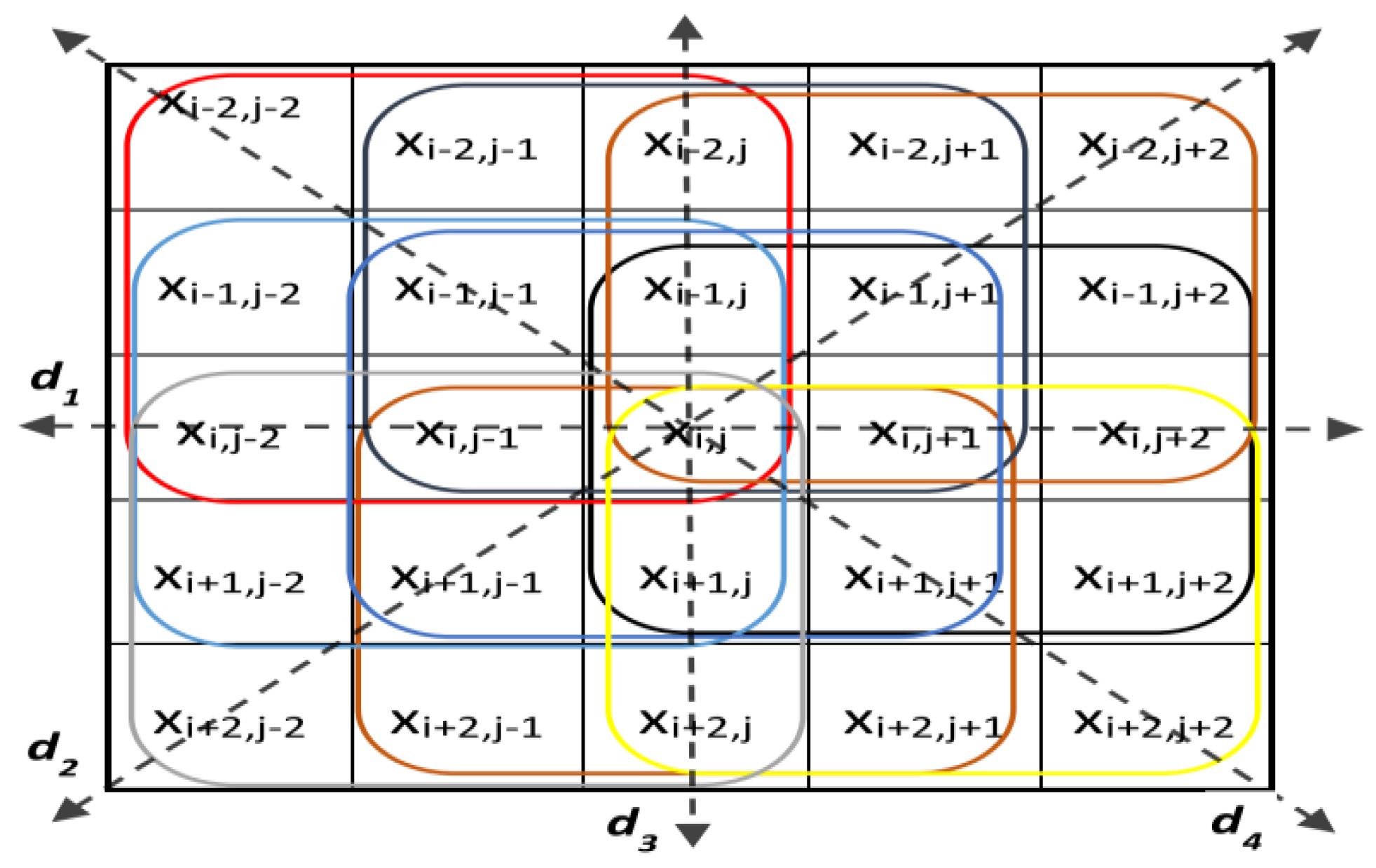
4.1.1. Divide and Conquer Strategy
4.1.2. Fuzzy Based Contextual Model
4.1.3. Adaptive Threshold
| Fuzzy Rule: | If |α − β| is Large, Then xi,j is a corrupted pixel. Else-If α and β both are Large, Then xi,j is an edge pixel. Else-If α = β, Then xi,j is a noise-free. |
4.2. Noise Detection Mechanism
5. Results and Discussions
5.1. Settings: Processing Windows/Kernels
5.2. Performance of the Proposed Noise Detector
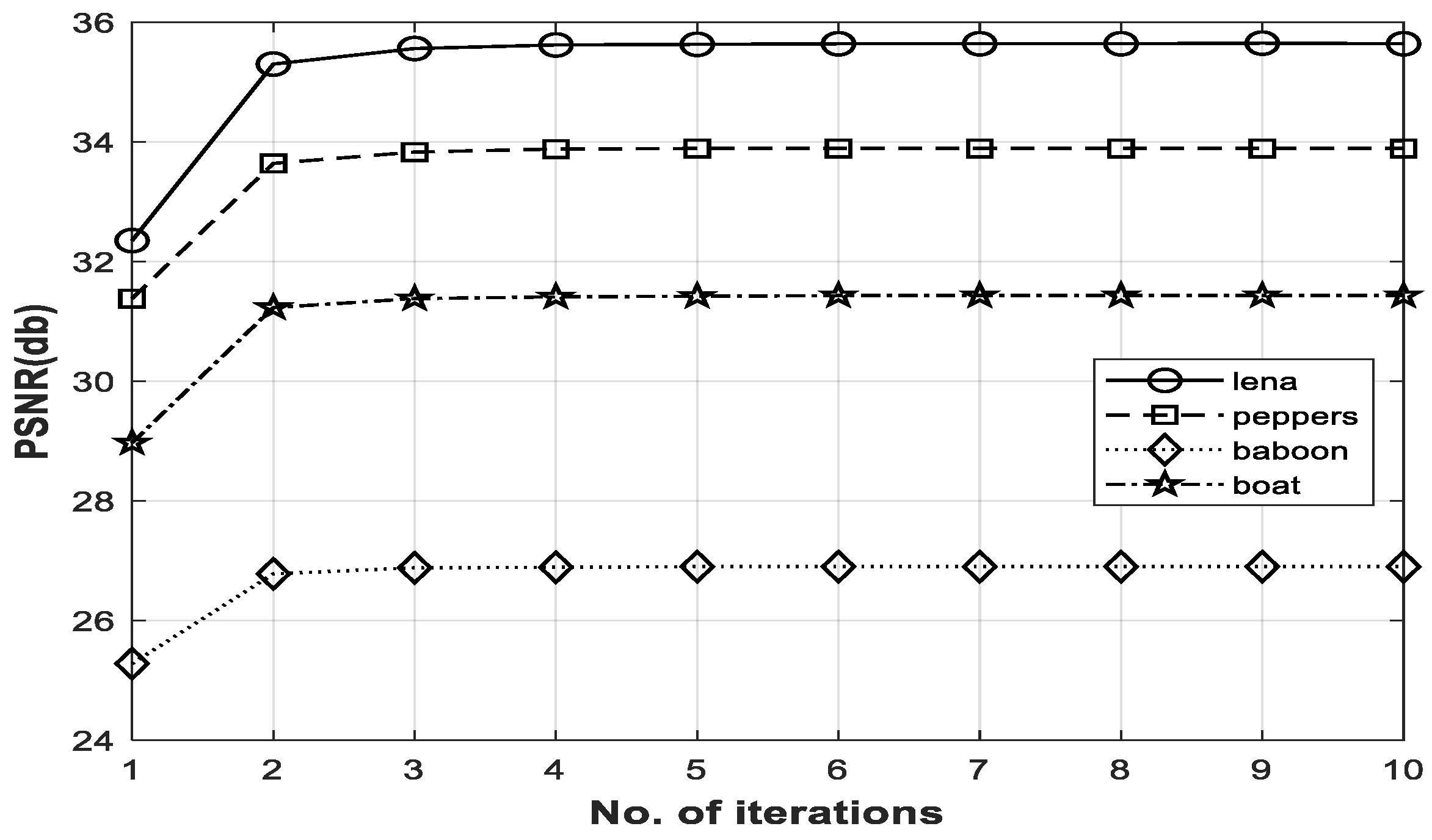
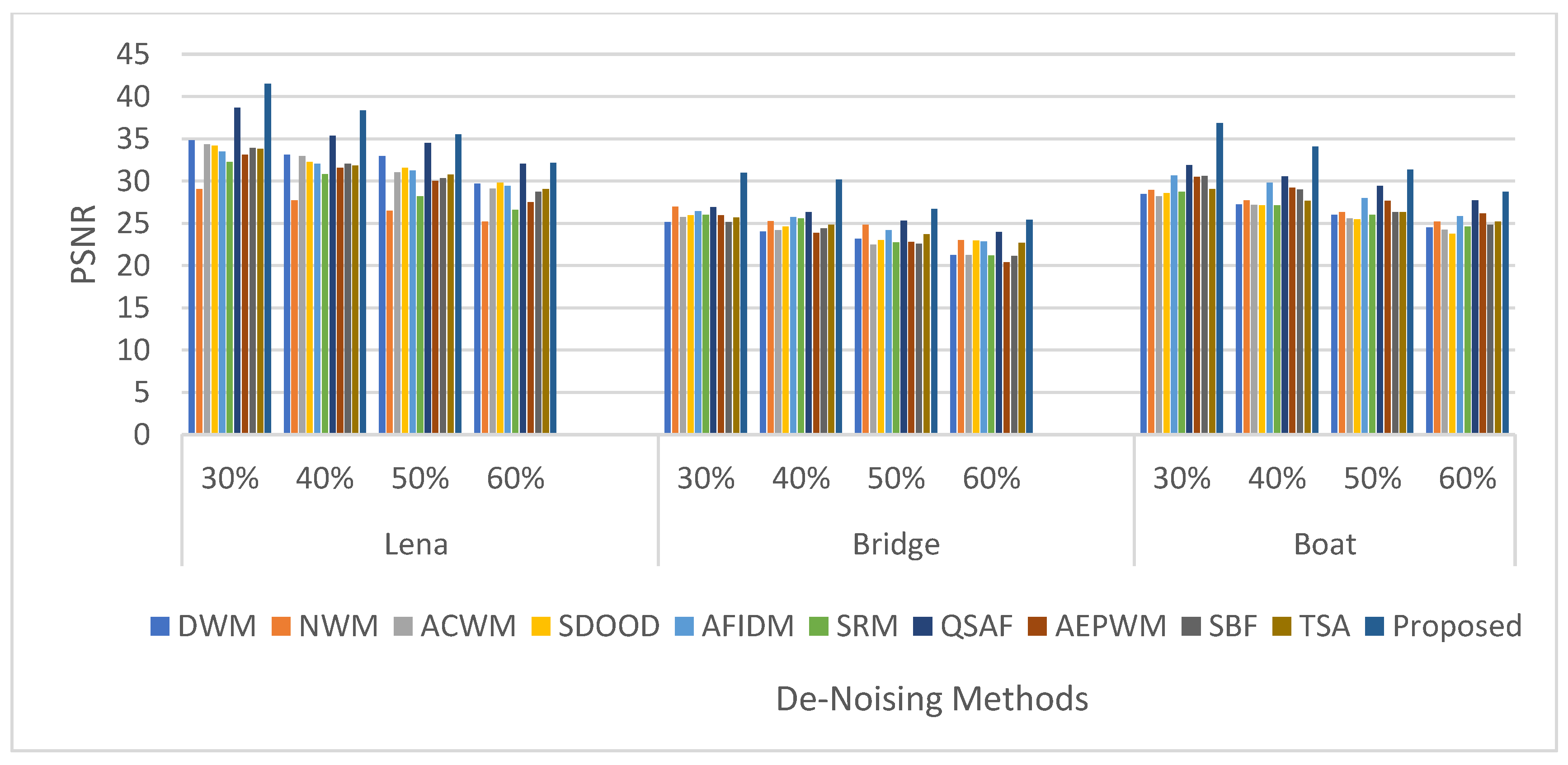
5.3. Performance of the Proposed De-Noising Filter
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhu, Z.; Zhang, X. A random-valued impulse noise removal algorithm via just noticeable difference threshold detector and weighted variation method. Int. J. Comput. Appl. 2022, 44, 187–200. [Google Scholar] [CrossRef]
- Aslam, N.; Ehsan, M.K.; Rehman, Z.U.; Hanif, M.; Mustafa, G. A modified form of different applied median filter for removal of salt & pepper noise. Multimed. Tools Appl. 2022, 82, 7479–7490. [Google Scholar]
- Luo, W. Efficient removal of impulse noise from digital images. IEEE Trans. Consum. Electron. 2006, 52, 523–527. [Google Scholar]
- Nodes, T.; Gallagher, N. Median filters: Some modifications and their properties. IEEE Trans. Acoust. Speech Signal Process. 1982, 30, 739–746. [Google Scholar] [CrossRef]
- Brownrigg, D.R.K. The weighted median filter. Commun. ACM 1984, 27, 807–818. [Google Scholar] [CrossRef]
- Ko, S.-J.; Lee, Y.H. Center weighted median filters and their applications to image enhancement. IEEE Trans. Circuits Syst. 1991, 38, 984–993. [Google Scholar] [CrossRef]
- Hwang, H.; Haddad, R.A. Adaptive median filters: New algorithms and results. IEEE Trans. Image Process. 1995, 4, 499–502. [Google Scholar] [CrossRef] [Green Version]
- Lin, T.-C. A new adaptive center weighted median filter for suppressing impulsive noise in images. Inf. Sci. 2007, 177, 1073–1087. [Google Scholar] [CrossRef]
- Zhang, Z.; Han, D.; Dezert, J.; Yang, Y. A new adaptive switching median filter for impulse noise reduction with pre-detection based on evidential reasoning. Signal Process. 2018, 147, 173–189. [Google Scholar] [CrossRef]
- Chen, T.; Ma, K.-K.; Chen, L.-H. Tri-state median filter for image denoising. IEEE Trans. Image Process. 1999, 8, 1834–1838. [Google Scholar] [CrossRef] [Green Version]
- Utaminingrum, F.; Uchimura, K.; Koutaki, G. High density impulse noise removal based on linear mean-median filter. In Proceedings of the 19th Korea-Japan Joint Workshop on Frontiers of Computer Vision, Incheon, Republic of Korea, 30 January–1 February 2013; pp. 11–17. [Google Scholar]
- Lin, P.-H.; Chen, B.-H.; Cheng, F.-C.; Huang, S.-C. A morphological mean filter for impulse noise removal. J. Disp. Technol. 2016, 12, 344–350. [Google Scholar] [CrossRef]
- Malinski, L.; Smolka, B. Fast averaging peer group filter for the impulsive noise removal in color images. J. Real-Time Image Process. 2016, 11, 427–444. [Google Scholar] [CrossRef] [Green Version]
- Mittal, M.; Verma, A.; Kaur, I.; Kaur, B.; Sharma, M.; Goyal, L.M.; Roy, S.; Kim, T. An efficient edge detection approach to provide better edge connectivity for image analysis. IEEE Access 2019, 7, 33240–33255. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, L. Multi-stage directional median filter. Int. J. Signal Process. 2009, 5, 249–252. [Google Scholar]
- Dong, Y.; Xu, S. A new directional weighted median filter for removal of random-valued impulse noise. IEEE Signal Process. Lett. 2007, 14, 193–196. [Google Scholar] [CrossRef]
- Lin, C.-H.; Tsai, J.-S.; Chiu, C. Switching bilateral filter with a texture/noise detector for universal noise removal. IEEE Trans. Image Process. 2010, 19, 2307–2320. [Google Scholar] [PubMed]
- Garnett, R.; Huegerich, T.; Chui, C.; He, W. A universal noise removal algorithm with an impulse detector. IEEE Trans. Image Process. 2005, 14, 1747–1754. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ville, V.D.; Nachtegael, D.M.; Weken, D.V.; Kerre, E.E.; Philips, W.; Lemahieu, I. Noise reduction by fuzzy image filtering. IEEE Trans. Fuzzy Syst. 2003, 11, 429–436. [Google Scholar] [CrossRef] [Green Version]
- Schulte, S.; Nachtegael, M.; Witte, V.D.; Weken, D.V.; Kerre, E.E. A fuzzy impulse noise detection and reduction method. IEEE Trans. Image Process. 2006, 15, 1153–1162. [Google Scholar] [CrossRef] [PubMed]
- Dubois, D.; Prade, H. Fuzzy sets in approximate reasoning, Part 1: Inference with possibility distributions. Fuzzy Sets Syst. 1991, 40, 143–202. [Google Scholar] [CrossRef]
- Kang, C.; Chia, C.; Wang, W. Fuzzy reasoning-based directional median filter design. Signal Process. 2009, 89, 344–351. [Google Scholar] [CrossRef]
- Toh, K.; Vin, K.; Isa, N.A.M. Cluster-based adaptive fuzzy switching median filter for universal impulse noise reduction. IEEE Trans. Consum. Electron. 2010, 56, 2560–2568. [Google Scholar] [CrossRef]
- Habib, M.; Hussain, A.; Choi, T. Adaptive threshold based fuzzy directional filter design using background information. Appl. Soft Comput. 2015, 29, 471–478. [Google Scholar] [CrossRef]
- Hussain, A.; Habib, M. A new cluster based adaptive fuzzy switching median filter for impulse noise removal. Multimed. Tools Appl. 2017, 76, 22001–22018. [Google Scholar] [CrossRef]
- Roy, A.; Manam, L.; Laskar, R.H. Region adaptive fuzzy filter: An approach for removal of random-valued impulse noise. IEEE Trans. Ind. Electron. 2018, 65, 7268–7278. [Google Scholar] [CrossRef]
- Nadeem, M.; Hussain, A.; Munir, A. Fuzzy logic based computational model for speckle noise removal in ultrasound images. Multimed. Tools Appl. 2019, 78, 18531–18548. [Google Scholar] [CrossRef]
- Selvi, A.S.; Kumar, K.P.M.; Dhanasekeran, S.; Maheswari, P.U.; Ramesh, S.; Pandi, S.S. De-noising of images from salt and pepper noise using hybrid filter, fuzzy logic noise detector and genetic optimization algorithm (HFGOA). Multimed. Tools Appl. 2020, 79, 4115–4131. [Google Scholar] [CrossRef]
- Liu, L.; Chen, C.P.; Zhou, Y.; You, X. A new weighted mean filter with a two-phase detector for removing impulse noise. Inf. Sci. 2015, 315, 1–16. [Google Scholar] [CrossRef]
- Veerakumar, T.; Subudhi, B.N.; Esakkirajan, S.; Pradhan, P.K. Context model based edge preservation filter for impulse noise removal. Expert Syst. Appl. 2017, 88, 29–44. [Google Scholar] [CrossRef]
- Bruntha, P.M.; Dhanasekar, S.; Hepsiba, D.; Sagayam, K.M.; Neebha, T.M.; Pandey, D.; Pandey, B.K. Application of switching median filter with L2 norm-based auto-tuning function for removing random valued impulse noise. Aerosp. Syst. 2022, 6, 53–59. [Google Scholar] [CrossRef]
- Wu, J.; Tang, C. Random-valued impulse noise removal using fuzzy weighted non-local means. Signal Image Video Process. 2014, 8, 349–355. [Google Scholar] [CrossRef]
- Kumar, M.; Tounsi, Y.; Kaur, K.; Nassim, A.; Mandoza-Santoyo, F.; Matoba, O. Speckle denoising techniques in imaging systems. J. Opt. 2020, 22, 06300. [Google Scholar] [CrossRef]
- Kusnik, D.; Smolka, B. Robust mean shift filter for mixed Gaussian and impulsive noise reduction in color digital images. Sci. Rep. 2022, 12, 14951. [Google Scholar] [CrossRef] [PubMed]
- Lin, C.; Li, Y.; Feng, S.; Huang, M. A Two-Stage Algorithm for the Detection and Removal of Random-Valued Impulse Noise Based on Local Similarity. IEEE Access 2020, 8, 222001–222012. [Google Scholar] [CrossRef]
- Pugalenthi, R.; Oliver, A.S.; Anuradha, M. Impulse noise reduction using hybrid neuro-fuzzy filter with improved firefly algorithm from X-ray bio-images. Int. J. Imaging Syst. Technol. 2020, 30, 1119–1131. [Google Scholar] [CrossRef]
- Kamarujjaman; Maitra, M.; Chakraborty, S. A novel decision-based adaptive feedback median filter for high density impulse noise suppression. Multimed. Tools Appl. 2021, 80, 299–321. [Google Scholar] [CrossRef]
- Nadeem, M.; Hussain, A.; Munir, A.; Habib, M.; Naseem, M.T. Removal of random valued impulse noise from grayscale images using quadrant based spatially adaptive fuzzy filter. Signal Process. 2020, 169, 107403. [Google Scholar] [CrossRef]
- Awad, A.S. Standard deviation for obtaining the optimal direction in the removal of impulse noise. IEEE Signal Process. Lett. 2011, 18, 407–410. [Google Scholar] [CrossRef]
- Deka, B.; Handique, M.; Datta, S. Sparse regularization method for the detection and removal of random-valued impulse noise. Multimed. Tools Appl. 2017, 76, 6355–6388. [Google Scholar] [CrossRef]
- Iqbal, N.; Ali, S.; Khan, I.; Lee, B.M. Adaptive edge preserving weighted mean filter for removing random-valued impulse noise. Symmetry 2019, 11, 395. [Google Scholar] [CrossRef] [Green Version]
- Habib, M.; Hussain, A.; Rasheed, S.; Ali, M. Adaptive fuzzy inference system based directional median filter for impulse noise removal. AEU-Int. J. Electron. Commun. 2016, 70, 689–697. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ratio Methods | 30% | 40% | 50% | 60% | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MD | FD | Total | MD | FD | Total | MD | FD | Total | MD | FD | Total | |
| DWM [16] | 9081 | 6550 | 15631 | 9499 | 7771 | 17,270 | 9511 | 11,380 | 20,891 | 12,701 | 12,298 | 24,999 |
| NWM [29] | 9578 | 6012 | 15,590 | 10,150 | 6220 | 16,370 | 11,126 | 8303 | 20,429 | 15,450 | 7551 | 23,001 |
| ACWM [8] | 14,340 | 2023 | 16,363 | 16,048 | 2164 | 18,212 | 23,690 | 3641 | 27,331 | 32,733 | 7702 | 40,435 |
| SDOOD [39] | 10,508 | 9672 | 20,180 | 12,273 | 10,325 | 22,598 | 13,745 | 15,599 | 27,344 | 14,952 | 12,833 | 27,785 |
| SRM [40] | 15,894 | 1998 | 17,892 | 21,076 | 2571 | 23,647 | 24,922 | 4204 | 29,126 | 32,719 | 6550 | 39,269 |
| AEPWM [41] | 9940 | 8028 | 17,968 | 10,910 | 7975 | 18,885 | 11,675 | 9617 | 21,292 | 13,571 | 9769 | 23,340 |
| AFIDM [42] | 7112 | 6334 | 13,446 | 8209 | 7069 | 15,278 | 8508 | 8375 | 15,483 | 8978 | 8894 | 17,872 |
| QSAF [38] | 5122 | 5899 | 11,021 | 5509 | 6311 | 11,820 | 6919 | 8025 | 14,944 | 9055 | 9240 | 18,295 |
| TSA [35] | 9890 | 5002 | 14,892 | 11,039 | 4215 | 15,254 | 13563 | 5284 | 18,847 | 15,070 | 7522 | 22,592 |
| Proposed | 5233 | 4865 | 10,098 | 5324 | 6208 | 11,532 | 7513 | 6828 | 14,341 | 9991 | 7428 | 17,419 |
| Methods | DWM | NWM | ACWM | SDOOD | AFIDM | SRM | QSAF | AEPWM | SBF | TSA | Proposed |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Lena | |||||||||||
| 30% | 0.914 | 0.831 | 0.936 | 0.920 | 0.938 | 0.918 | 0.948 | 0.932 | 0.913 | 0.923 | 0.950 |
| 40% | 0.886 | 0.814 | 0.917 | 0.887 | 0.906 | 0.889 | 0.930 | 0.901 | 0.895 | 0.904 | 0.933 |
| 50% | 0.847 | 0.762 | 0.860 | 0.849 | 0.869 | 0.836 | 0.879 | 0.866 | 0.846 | 0.868 | 0.881 |
| 60% | 0.747 | 0.709 | 0.794 | 0.809 | 0.797 | 0.787 | 0.805 | 0.775 | 0.728 | 0.817 | 0.759 |
| Bridge | |||||||||||
| 30% | 0.718 | 0.709 | 0.795 | 0.776 | 0.709 | 0.699 | 0.782 | 0.786 | 0.749 | 0.791 | 0.806 |
| 40% | 0.617 | 0.655 | 0.734 | 0.725 | 0.641 | 0.628 | 0.728 | 0.735 | 0.655 | 0.740 | 0.759 |
| 50% | 0.556 | 0.600 | 0.658 | 0.688 | 0.618 | 0.598 | 0.630 | 0.629 | 0.583 | 0.663 | 0.678 |
| 60% | 0.492 | 0.524 | 0.557 | 0.502 | 0.498 | 0.514 | 0.591 | 0.581 | 0.501 | 0.580 | 0.586 |
| Boat | |||||||||||
| 30% | 0.814 | 0.756 | 0.858 | 0.849 | 0.793 | 0.826 | 0.849 | 0.855 | 0.854 | 0.862 | 0.879 |
| 40% | 0.731 | 0.714 | 0.827 | 0.819 | 0.756 | 0.764 | 0.818 | 0.816 | 0.822 | 0.805 | 0.843 |
| 50% | 0.672 | 0.669 | 0.765 | 0.715 | 0.728 | 0.719 | 0.759 | 0.737 | 0.778 | 0.761 | 0.806 |
| 60% | 0.639 | 0.609 | 0.696 | 0.579 | 0.649 | 0.656 | 0.703 | 0.665 | 0.707 | 0.693 | 0.755 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Habib, M.; Hussain, A.; Rehman, E.; Muzammal, S.M.; Cheng, B.; Aslam, M.; Jilani, S.F. Convolved Feature Vector Based Adaptive Fuzzy Filter for Image De-Noising. Appl. Sci. 2023, 13, 4861. https://doi.org/10.3390/app13084861
Habib M, Hussain A, Rehman E, Muzammal SM, Cheng B, Aslam M, Jilani SF. Convolved Feature Vector Based Adaptive Fuzzy Filter for Image De-Noising. Applied Sciences. 2023; 13(8):4861. https://doi.org/10.3390/app13084861
Chicago/Turabian StyleHabib, Muhammad, Ayyaz Hussain, Eid Rehman, Syeda Mariam Muzammal, Benmao Cheng, Muhammad Aslam, and Syeda Fizzah Jilani. 2023. "Convolved Feature Vector Based Adaptive Fuzzy Filter for Image De-Noising" Applied Sciences 13, no. 8: 4861. https://doi.org/10.3390/app13084861