

Task Complexity and the Skills Dilemma in the Programming and Control of Collaborative Robots for Manufacturing



Abstract
:1. Introduction
- What are the common programming and control methods for cobots in the existing market and literature?
- What bearing does the complexity of a cobot task have on the skills required to program the cobot to perform that task?
- How effective are cobot programming and control methods in the existing market and literature? Who is the most appropriate worker to implement the methods, and have the methods been suitably developed for that worker?
2. Technical Readiness for Cobot Deployment

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cobot Task Category | Related Cobot Operations |
|---|---|
| Assembly | Screwdriving, Part Insertion, Pick and Place |
| Dispensing | Gluing, Sealing, Lubricating, Painting, Coating, Dipping |
| Finishing | Sanding, Polishing |
| Material Handling | Packaging, Palletising, Bin Picking, Kitting |
| Material Removal | Grinding, Deburring, Trimming, Milling, Routing, Drilling |
| Welding | Mig, Soldering |
| Quality Inspection | Testing, Inspecting, Measuring |
| Machine Tending | CNC, Injection Moulding, Automated Machining |
3. Existing Cobot Programming and Control Methodologies
3.1. Programming of Industrial and Collaborative Robots
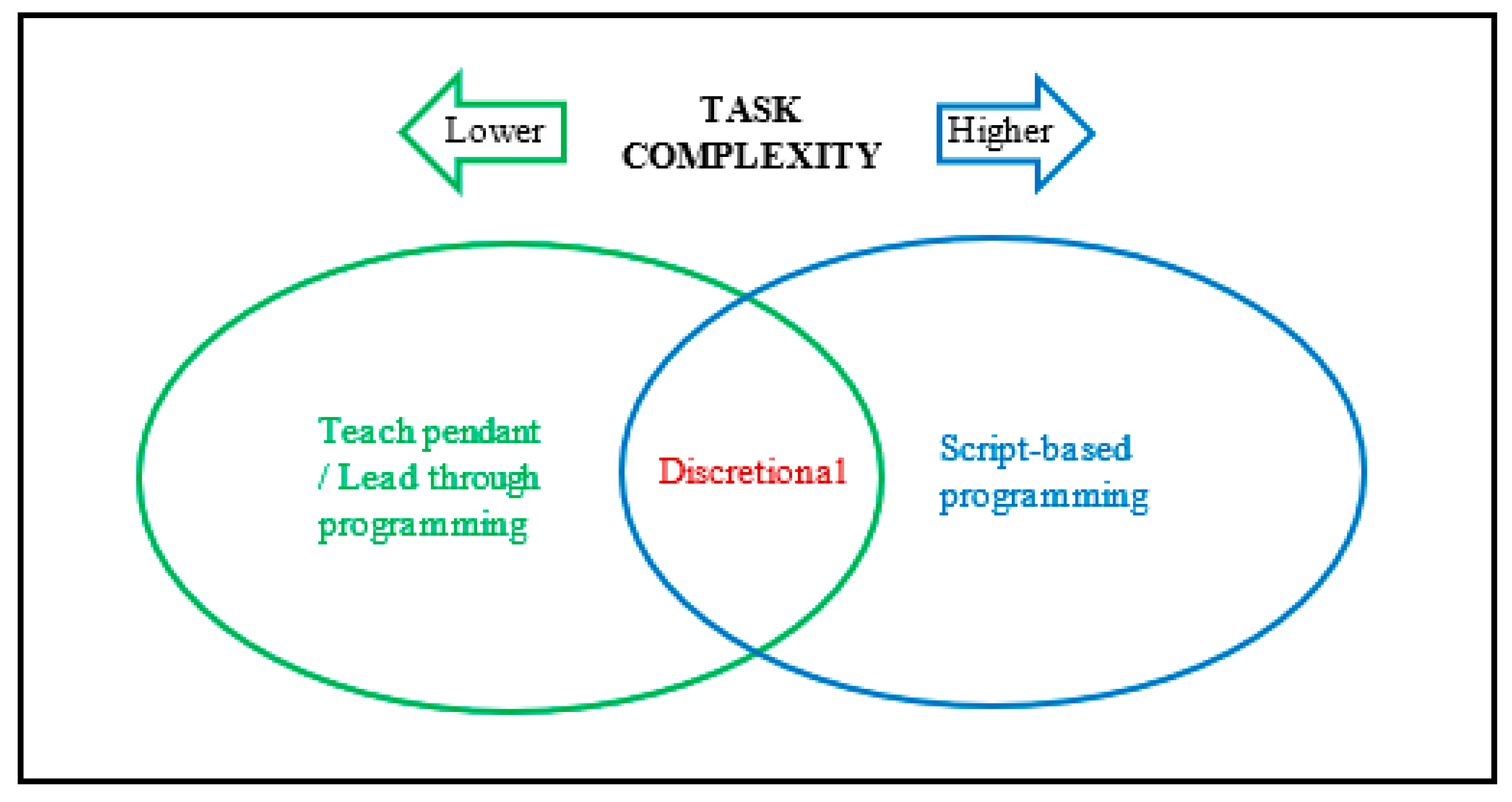
3.2. Cobot Task Complexity
- Type of joint movement (joint or linear motion)
- Number of movements
- Number of waypoints
- Number of end-effector engagements
- Degree of positional precision required
- Sensor input required (force, proximity, gyroscopic, etc.)
- Ease of end-effector to grip (owing to the surface or shape of parts, etc.)
- Payload handling
| Task Complexity Level | Types of Associated Tasks |
|---|---|
| 1 (Low) | Simple Gluing, Sealing, Dipping, Sanding, Polishing |
| 2 (Low–medium) | Pick and Place, Lubricating, Painting, Coating, Injection Moulding |
| 3 (Medium) | Material Handling, Simple Assembly, Grinding, Deburring, Trimming, Drilling, Screwdriving |
| 4 (Medium–high) | Parts Insertion, CNC, Automated Machining |
| 5 (High) | Complex Assembly, Precise Milling, Routing, Quality Inspection |
3.3. Task Allocation in Human–Robot Collaboration
3.4. Leading Cobot Vendors’ Programming and Control Methodologies
| Cobot Manufacturer | Programming Interface/Type | Programming Method | Intended User Level | Intended Task Complexity Limit | Source Language/Related Language (If Known) |
|---|---|---|---|---|---|
| Universal Robots [28,60,61] | PolyScope | GUI/Hand guide | Unskilled | Low | Proprietary (URP) |
| URScript | Textual (Script) | Skilled | High | Python, C++, C#, VB, Java | |
| URSim | GUI/Simulation | Unskilled | Low | Proprietary (URP) | |
| ABB [62,63,64] | Wizard | GUI/Hand guide | Unskilled | Low | Block-based RAPID |
| FlexPendant | GUI/Simulation | Semi-skilled | Medium | ||
| RAPID | Textual | Skilled | High | Visual Basic | |
| RobotStudio | GUI/Simulation | Semi-skilled | Medium to High | Proprietary (RAPID) | |
| Fanuc [65] | TP (Teach Pendant) | GUI/Hand guide | Unskilled | Low | Proprietary (TP) |
| Karel | Textual | Skilled | High | Pascal | |
| Roboguide | GUI/Simulation | Semi-skilled | Medium to High | ||
| Festo [66] | BionicCobot | GUI | Unskilled | Low to Medium | ROS |
| Festo Robotic Suite | GUI | Semi-skilled | Medium | Python/ROS | |
| RoboCIM | GUI/Simulation | Semi-skilled | Medium | Proprietary | |
| Kuka [67] | iiOKA OS | GUI/Hand guide | Unskilled | Low | Linux kernel |
| KUKA Work.Visual | GUI/Textual | Skilled | High | ||
| KRL (KUKA Robot Language) | GUI/Textual | Skilled | High | Pascal | |
| Kuka Sunrise | Textual | Skilled | High | Java | |
| Kuka Sim/SimPro | GUI/Simulation | Semi-skilled | Medium to High | Proprietary | |
| Yaskawa [68,69,70] | Direct Teach (DT) | Hand guide | Unskilled | Low | Proprietary |
| Smart Pendant | GUI/Hand guide | Unskilled | Low | Proprietary | |
| INFORM II | GUI/Textual | Skilled | High | C | |
| Omron [71] | ACE (Automatic Control Environment) | GUI/Hand guide | Unskilled | Low | C# |
| eV+ | Textual | Skilled | High | MS-DOS/Unix Script | |
| ACE Emulation Mode | GUI/Simulation | Unskilled | Low | C# | |
| Generic cobot programming applications (RoboDK, ArtiMinds, Wandelbot, Pickit, Robomaster, G-Code, ROS, Traditional languages) | RoboDK GUI [72] | GUI/Hand guide | Unskilled | Low | RDK |
| RoboDK API [72] | Textual | Skilled | Medium–High | Python (default), C, C++, … | |
| ArtiMinds RPS [73] | Modular | Semi-skilled | Medium–High | Proprietary (RPS) | |
| ArtiMinds RPS [73] | Modular | Semi-skilled | Medium–High | Proprietary (RPS) | |
| Wandelbot Tracepen [74] | Input device/App | Unskilled | Medium–High | Proprietary | |
| Pickit robot vision system [75] | GUI/3D vision | Semi-skilled | Medium | ||
| Robotmaster [76] | GUI/Simulation | Semi-skilled | Medium–High | ||
| G-Code [77] | (CAD/CAM)/Textual | Skilled (CNC) | Medium–High | G-Code | |
| ROS/ROS2 [78] | Textual | Skilled | High | C++/Python | |
| Traditional prog languages: Python, C, C++, C#, Java, [79] | Textual | Skilled | High | Proprietary |
3.5. Controlling Cobots without Formal Programming
3.5.1. Existing Cobot Control Methods
3.5.2. Proposed Cobot Control Methods in Recent Literature
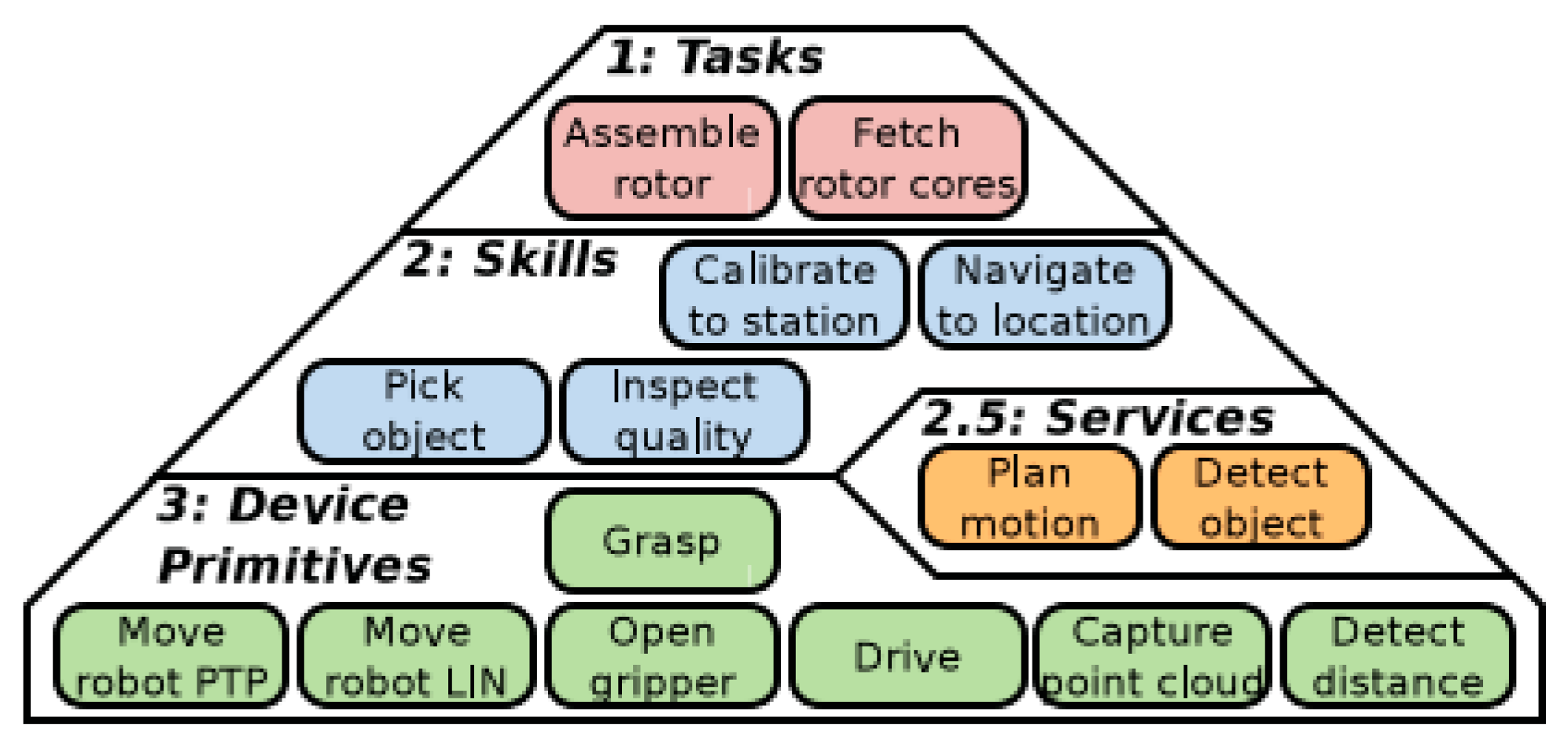
Skill Based System
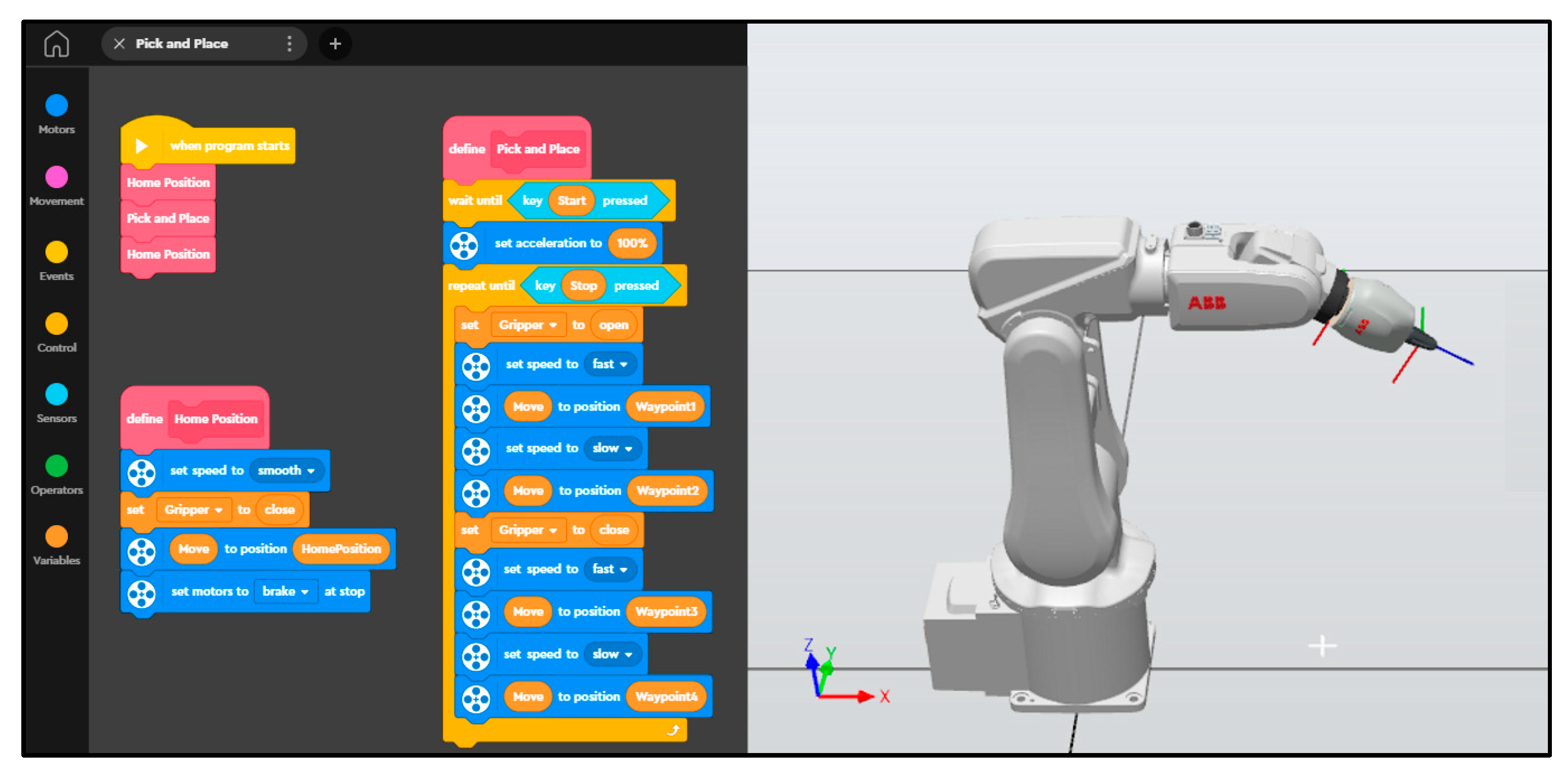
Block-Based Interface
Layered Block-Based Interface
Chat-Assisted Block-Based Interface
Artificial Intelligence
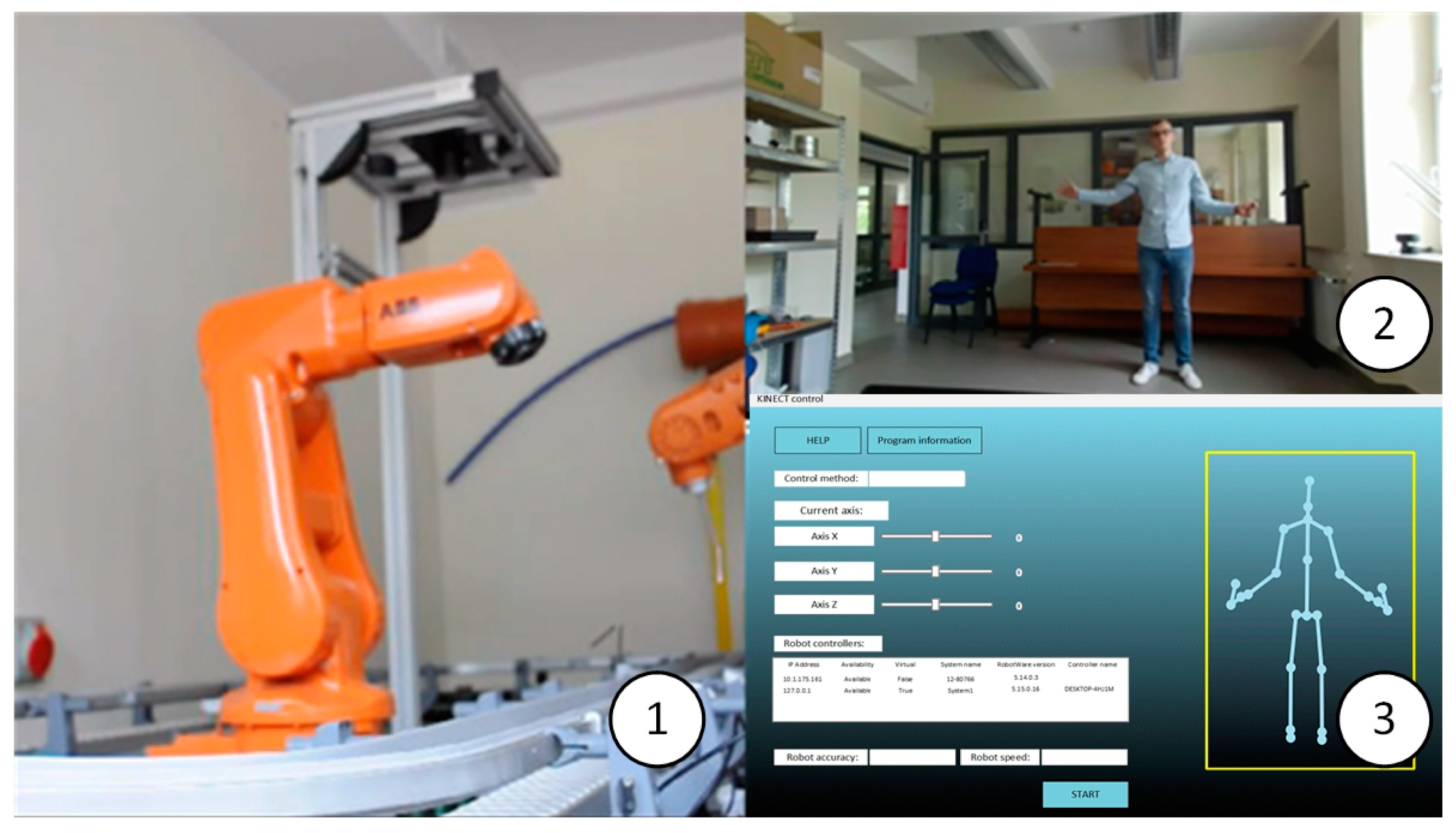
Voice and Gesture Control
Virtual Reality Systems
Augmented Reality Systems
4. The Cobot Programming and Control Sales Pitch
4.1. Cobot Vendors’ Perspectives on Their Programming Applications
4.2. Epitomising the Marketing Message
5. The Underlying Skillset
- The cobot and its environment
- Cobot programming steps
- Cobot task implementation
5.1. Fundamental Technical Aspects of Cobot Control
5.2. Robotics (Hardware)
| Robotic Element | Specific Robotic Entity |
|---|---|
| General | Fundamental kinematics and dynamics principles |
| Limits | Safety limits, including power, momentum, stopping time and distance, tool speed and force and elbow speed and force limits |
| Joint position range limits and maximum speeds | |
| Orientation and positioning | Tool Centre Point (TCP), Tool Offset, Tool Position and Tool Rotational Vector settings (all represented as three-dimensional cartesian coordinate frames) |
| Relationship between base and tool coordinate frames | |
| Direction for linear movement (expressed as positive or negative cartesian coordinates or direction vector) | |
| Waypoints (with options of fixed, relative or variable position) | |
| Joints | Joint positions (in degrees) for the base, shoulder, elbow and three wrist joints (pitch, yaw and roll). |
| Linear, non-linear and circular joint movements | |
| Joint speed and acceleration values | |
| Communication | I/O Signals (Digital, Analog, Tool, Configurable, Boolean Register, Integer Register, Float Register) |
5.3. Programming (Software)
| Programming Element | Specific Cobot Programming Entity |
|---|---|
| General syntax | Program structure and sequencing |
| Data | Constants, variables, variable assignment |
| Conditionals/selections | If, ElseIf, Else, Until, Switch statements, Boolean |
| Program loops/iterations | For, While, Do-While |
| Functions/procedures | Thread, Subroutine call |
| Control points | Event, Wait, Set, Halt, Timer |
5.4. Skills Required to Program and Control a Cobot
- Establish a connection to the cobot controller from a remote console. Some knowledge of computer networks would be required to communicate with a host over a socket connection.
- Compose a syntactically correct control program. At least a moderate level of skill in programming, with an understanding of program structure and syntax, would be required. For this study, URScript test programs were written in Python, so an understanding of the relevant formal language for the client program is also necessary.
- Choose:
- Individual cobot joint positional coordinates and orientation parameters
- Motor speed and acceleration settings
- Tool selection
- Delay timing
- Other aspects depend on the complexity of the task being programmed.
5.5. Skills Versus Task Complexity Testing Methodology and Results

6. Analysis of the Findings of This Review
6.1. Effectiveness of Existing Cobot Program and Control Methodologies
6.2. The Practicality of the Primary Cobot Program and Control Methodologies Proposed in the Literature
6.2.1. Block-Based Interface
6.2.2. Voice and Gesture Control
6.2.3. Virtual and Augmented Reality Systems
6.3. Summary of Findings and Responses to Research Questions
7. Discussion and Future Work
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bloss, R. Collaborative robots are rapidly providing major improvements in productivity, safety, programming ease, portability and cost while addressing many new applications. Ind. Robot. Int. J. 2016, 43, 463–468. [Google Scholar] [CrossRef]
- De Backer, K.; DeStefano, T.; Menon, C.; Suh, J.R. Industrial robotics and the global organisation of production. OECD Sci. Technol. Ind. Work. Pap. 2018, 3, 1–44. [Google Scholar]
- Benotsmane, R.; Kovács, G.; Dudás, L. Economic, social impacts and operation of smart factories in Industry 4.0 focusing on simulation and artificial intelligence of collaborating robots. Soc. Sci. 2019, 8, 143. [Google Scholar] [CrossRef] [Green Version]
- Bryndin, E. Collaboration Robots with Artificial Intelligence (AI) as digital doubles of person for communication in public life and space. Bp. Int. Res. Exact Sci. 2019, 1, 1–11. [Google Scholar]
- Gasparetto, A.; Scalera, L. A brief history of industrial robotics in the 20th century. Adv. Hist. Stud. 2019, 8, 24–35. [Google Scholar] [CrossRef] [Green Version]
- Collaborative Robot Applications. Available online: https://www.universal-robots.com/applications (accessed on 10 December 2022).
- Knudsen, M.; Kaivo-Oja, J. Collaborative robots: Frontiers of current literature. J. Intell. Syst. Theory Appl. 2020, 3, 13–20. [Google Scholar] [CrossRef]
- Bi, Z.M.; Luo, C.; Miao, Z.; Zhang, B.; Zhang, W.J.; Wang, L. Safety assurance mechanisms of collaborative robotic systems in manufacturing. Robot. Comput.-Integr. Manuf. 2021, 67, 102022. [Google Scholar] [CrossRef]
- Fischer, S. Robotics—Market Data Analysis & Forecasts. Statista Technology Market Outlook. 2022. Available online: https://www.statista.com/study/116601/robotics-market-data-analysis-and-forecasts (accessed on 2 October 2022).
- Roehl, C. Know Your Machine: Traditional Industrial Robots vs. Cobots. 2022. Available online: https://www.universal-robots.com/blog/know-your-machine-traditional-industrial-robots-vs-cobots (accessed on 12 January 2023).
- Vojić, S. Applications of collaborative industrial robots. Mach. Technol. Mater. 2020, 14, 96–99. [Google Scholar]
- Dmytriyev, Y.; Carnevale, M.; Giberti, H.; Todeschini, G. On cobot programming in industrial tasks: A test case. In Proceedings of the 2022 International Congress on Human-Computer Interaction, Optimization and Robotic Applications, Ankara, Turkey, 9–11 June 2022; IEEE: New York, NY, USA, 2022; pp. 1–9. [Google Scholar]
- El Zaatari, S.; Marei, M.; Li, W.; Usman, Z. Cobot programming for collaborative industrial tasks: An overview. Robot. Auton. Syst. 2019, 116, 162–180. [Google Scholar] [CrossRef]
- Schou, C.; Andersen, R.S.; Chrysostomou, D.; Bøgh, S.; Madsen, O. Skill-based instruction of collaborative robots in industrial settings. Robot. Comput.-Integr. Manuf. 2018, 53, 72–80. [Google Scholar] [CrossRef]
- Schoen, A.; White, N.; Henrichs, C.; Siebert-Evenstone, A.; Shaffer, D.; Mutlu, B. CoFrame: A System for Training Novice Cobot Programmers. In Proceedings of the 2022 17th ACM/IEEE International Conference on Human-Robot Interaction, Sapporo, Japan, 7–10 March 2022; IEEE: New York, NY, USA, 2022; pp. 185–194. [Google Scholar]
- Kildal, J.; Tellaeche, A.; Fernández, I.; Maurtua, I. Potential users’ key concerns and expectations for the adoption of cobots. Procedia CIRP 2018, 72, 21–26. [Google Scholar] [CrossRef]
- Aaltonen, I.; Salmi, T. Experiences and expectations of collaborative robots in industry and academia: Barriers and development needs. Procedia Manuf. 2019, 38, 1151–1158. [Google Scholar] [CrossRef]
- Kopp, T.; Baumgartner, M.; Kinkel, S. Success factors for introducing industrial human-robot interaction in practice: An empirically driven framework. Int. J. Adv. Manuf. Technol. 2021, 112, 685–704. [Google Scholar] [CrossRef]
- Giannopoulou, G.; Borrelli, E.M.; McMaster, F. “Programming-It’s not for Normal People”: A Qualitative Study on User-Empowering Interfaces for Programming Collaborative Robots. In Proceedings of the 2021 30th IEEE International Conference on Robot & Human Interactive Communication, Vancouver, BC, Canada, 8–12 August 2021; IEEE: New York, NY, USA, 2021; pp. 37–44. [Google Scholar]
- Bogue, R. Europe continues to lead the way in the collaborative robot business. Ind. Robot. Int. J. 2016, 43, 6–11. [Google Scholar] [CrossRef]
- Schumacher, S.; Hall, R.; Waldman-Brown, A.; Sanneman, L. Technology Adoption of Collaborative Robots for Welding in Small and Medium-sized Enterprises: A Case Study Analysis. In Proceedings of the Conference on Production Systems and Logistics, Vancouver, BC, Canada, 17–20 May 2022; Publish-Ing: Hannover, Germany, 2022; pp. 462–471. [Google Scholar]
- Fantini, P.; Pinzone, M.; Sella, F.; Taisch, M. Collaborative robots and new product introduction: Capturing and transferring human expert knowledge to the operators. In Advances in Ergonomics of Manufacturing: Managing the Enterprise of the Future, Proceedings of the AHFE 2017 International Conference on Human Aspects of Advanced Manufacturing, Los Angeles, CA, USA, 17–21 July 2017; Springer International Publishing: Berlin/Heidelberg, Germany, 2018; Volume 8, pp. 259–268. [Google Scholar]
- Pieskä, S.; Kaarela, J.; Mäkelä, J. Simulation and programming experiences of collaborative robots for small-scale manufacturing. In Proceedings of the 2018 2nd International Symposium on Small-scale Intelligent Manufacturing Systems, Cavan, Ireland, 16–18 April 2018; IEEE: New York, NY, USA, 2018; pp. 1–4. [Google Scholar]
- Ionescu, T.B.; Schlund, S. A participatory programming model for democratizing cobot technology in public and industrial Fablabs. Procedia CIRP 2019, 81, 93–98. [Google Scholar] [CrossRef]
- Schmidbauer, C.; Schlund, S.; Ionescu, T.B.; Hader, B. Adaptive task sharing in human-robot interaction in assembly. In Proceedings of the 2020 IEEE International Conference on Industrial Engineering and Engineering Management, Singapore, 14–17 December 2020; IEEE: New York, USA, 2020; pp. 546–550. [Google Scholar]
- Owen-Hill, A. What Are the Different Programming Methods for Robots? Available online: https://blog.robotiq.com/what-are-the-different-programming-methods-for-robots (accessed on 19 October 2022).
- ABB Robotics Operating Manual Introduction to RAPID. Available online: http://rovart.cimr.pub.ro/docs/OpIntroRAPID.pdf (accessed on 4 October 2022).
- Universal Robots. The URScript Programming Language. Available online: https://s3-eu-west-1.amazonaws.com/ur-support-site/18383/scriptmanual_en_1.3.pdf (accessed on 4 October 2022).
- Gusan, V.; Țîțu, M.A.; Oprean, C. Industrial robots versus collaborative robots—The place and role in non-conventional technologies. Acta Tech. Napoc.-Ser. Appl. Math. Mech. Eng. 2022, 65, 101–110. [Google Scholar]
- Michaelis, J.E.; Siebert-Evenstone, A.; Shaffer, D.W.; Mutlu, B. Collaborative or simply uncaged? understanding human-cobot interactions in automation. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020; pp. 1–12. [Google Scholar]
- Tilley, J. Automation, Robotics, and the Factory of the Future; McKinsey & Company: Los Angeles, CA, USA, 2017. [Google Scholar]
- Simoes, A.C.; Lucas Soares, A.; Barros, A.C. Drivers impacting cobots adoption in manufacturing context: A qualitative study. In Advances in Manufacturing II: Volume 1— Solutions for Industry 4.0; Springer: Cham, Switzerland, 2019; pp. 203–212. [Google Scholar]
- Trattner, A.; Hvam, L.; Forza, C.; Herbert-Hansen, Z.N.L. Product complexity and operational performance: A systematic literature review. CIRP J. Manuf. Sci. Technol. 2019, 25, 69–83. [Google Scholar] [CrossRef]
- Transeth, A.A.; Stepanov, A.; Linnerud, Å.S.; Ening, K.; Gjerstad, T. Competitive high variance, low volume manufacturing with robot manipulators. In Proceedings of the 2020 3rd International Symposium on Small-Scale Intelligent Manufacturing Systems, Gjovik, Norway, 10–12 June 2020; IEEE: New York, USA, 2020; pp. 1–7. [Google Scholar]
- Kootbally, Z. Industrial robot capability models for agile manufacturing. Ind. Robot. Int. J. 2016, 43, 481–494. [Google Scholar] [CrossRef]
- Harbers, M.; Peeters, M.M.; Neerincx, M.A. Perceived autonomy of robots: Effects of appearance and context. In Proceedings of the A World with Robots: International Conference on Robot Ethics, Lisbon, Portugal, 23–24 October 2017; Springer International Publishing: Berlin/Heidelberg, Germany, 2017; pp. 19–33. [Google Scholar]
- Khamis, A.; Hussein, A.; Elmogy, A. Multi-robot task allocation: A review of the state-of-the-art. Coop. Robot. Sens. Netw. 2015, 2015, 31–51. [Google Scholar]
- Ho, M.; Farid, A.; Majumdar, A. Towards a Framework for Comparing the Complexity of Robotic Tasks. In Proceedings of the Algorithmic Foundations of Robotics XV: Proceedings of the Fifteenth Workshop on the Algorithmic Foundations of Robotics. University of Maryland, College Park, MD, USA, 22–24 June 2022; Springer International Publishing: Cham, Switzerland, 2022; pp. 273–293. [Google Scholar]
- Bengoa, P.; González-Ojeda, I.D.; Ibarguren, A.; Goenaga, B.; Martínez-De-Lahidalga, S.; Gkournelos, C.; Lotsaris, K.; Angelakis, P.; Makris, S.; Antolín-Urbaneja, J.C. Coordination of Two Robots for Manipulating Heavy and Large Payloads Collaboratively: SOFOCLES Project Case Use. In Advances and Applications in Computer Science, Electronics, and Industrial Engineering, Proceedings of the Conference on Computer Science, Electronics and Industrial Engineering (CSEI 2021), Ambato, Ecuador, 26 May 2022; Springer International Publishing: Cham, Switzerland, 2022; pp. 255–271. [Google Scholar]
- Chromjakova, F.; Trentesaux, D.; Kwarteng, M.A. Human and cobot cooperation ethics: The process management concept of the production workplace. J. Compet. 2021, 13, 21–38. [Google Scholar] [CrossRef]
- Alitappeh, R.J.; Jeddisaravi, K. Multi-robot exploration in task allocation problem. Appl. Intell. 2022, 52, 2189–2211. [Google Scholar] [CrossRef]
- Seenu, N.; Kuppan Chetty, R.M.; Ramya, M.M.; Janardhanan, M.N. Review on state-of-the-art dynamic task allocation strategies for multiple-robot systems. Ind. Robot. Int. J. Robot. Res. Appl. 2020, 47, 929–942. [Google Scholar]
- Schneider, E.; Sklar, E.I.; Parsons, S. Mechanism selection for multi-robot task allocation. In Proceedings of the Towards Autonomous Robotic Systems: 18th Annual Conference, TAROS 2017, Guildford, UK, 19–21 July 2017; Springer International Publishing: Berlin/Heidelberg, Germany, 2017; pp. 421–435. [Google Scholar]
- Murugappan, E.; Subramanian, N.; Rahman, S.; Goh, M.; Chan, H.K. Performance analysis of clustering methods for balanced multi-robot task allocations. Int. J. Prod. Res. 2022, 60, 4576–4591. [Google Scholar] [CrossRef]
- Semwal, T.; Jha, S.S.; Nair, S.B. On ordering multi-robot task executions within a cyber physical system. ACM Trans. Auton. Adapt. Syst. (TAAS) 2017, 12, 1–27. [Google Scholar] [CrossRef] [Green Version]
- Sathyan, A.; Ma, O. Collaborative control of multiple robots using genetic fuzzy systems. Robotica 2019, 37, 1922–1936. [Google Scholar] [CrossRef]
- Johnson, L.B.; Choi, H.L.; How, J.P. The role of information assumptions in decentralized task allocation: A tutorial. IEEE Control. Syst. Mag. 2016, 36, 45–58. [Google Scholar]
- Cutting Edge Industrial Collaborative Robots, Built to Do More. Available online: https://www.universal-robots.com/e-series/ (accessed on 15 December 2022).
- Karami, H.; Darvish, K.; Mastrogiovanni, F. A task allocation approach for human-robot collaboration in product defects inspection scenarios. In Proceedings of the 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Naples, Italy, 31 August–4 September 2020; IEEE: New York, NY, USA, 2020; pp. 1127–1134. [Google Scholar]
- Lee, M.L.; Behdad, S.; Liang, X.; Zheng, M. Task allocation and planning for product disassembly with human–robot collaboration. Robot. Comput.-Integr. Manuf. 2022, 76, 102306. [Google Scholar] [CrossRef]
- Roncone, A.; Mangin, O.; Scassellati, B. Transparent role assignment and task allocation in human robot collaboration. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; IEEE: New York, NY, USA, 2017; pp. 1014–1021. [Google Scholar]
- Müller, R.; Vette, M.; Geenen, A. Skill-based dynamic task allocation in human-robot-cooperation with the example of welding application. Procedia Manuf. 2017, 11, 13–21. [Google Scholar] [CrossRef]
- Liau, Y.Y.; Ryu, K. Task allocation in human-robot collaboration (HRC) based on task characteristics and agent capability for mold assembly. Procedia Manuf. 2020, 51, 179–186. [Google Scholar] [CrossRef]
- Liau, Y.Y.; Ryu, K. Genetic algorithm-based task allocation in multiple modes of human–robot collaboration systems with two cobots. Int. J. Adv. Manuf. Technol. 2022, 119, 7291–7309. [Google Scholar] [CrossRef]
- Ranz, F.; Hummel, V.; Sihn, W. Capability-based task allocation in human-robot collaboration. Procedia Manuf. 2017, 9, 182–189. [Google Scholar] [CrossRef]
- Malik, A.A.; Bilberg, A. Complexity-based task allocation in human-robot collaborative assembly. Ind. Robot. Int. J. Robot. Res. Appl. 2019, 9, 182–189. [Google Scholar] [CrossRef]
- Johannsmeier, L.; Haddadin, S. A hierarchical human-robot interaction-planning framework for task allocation in collaborative industrial assembly processes. IEEE Robot. Autom. Lett. 2016, 2, 41–48. [Google Scholar] [CrossRef] [Green Version]
- Evangelou, G.; Dimitropoulos, N.; Michalos, G.; Makris, S. An approach for task and action planning in human–robot collaborative cells using AI. Procedia Cirp 2021, 97, 476–481. [Google Scholar] [CrossRef]
- Yu, T.; Huang, J.; Chang, Q. Optimizing task scheduling in human-robot collaboration with deep multi-agent reinforcement learning. J. Manuf. Syst. 2021, 1, 487–499. [Google Scholar] [CrossRef]
- Make the Simple Tasks Easy and the Complex Tasks Possible. Available online: https://www.universal-robots.com/products/polyscope (accessed on 15 December 2022).
- Offline Simulator—E-Series—URSim for non Linux 5.12.5. Available online: https://www.universal-robots.com/download/software-e-series/simulator-non-linux/offline-simulator-e-series-ur-sim-for-non-linux-5125/ (accessed on 30 November 2022).
- Wizard Easy Programming. Available online: https://new.abb.com/products/robotics/application-software/wizard (accessed on 15 December 2022).
- Technical Reference Manual. RAPID Instructions, Functions and Data Types. Available online: https://library.e.abb.com/public/688894b98123f87bc1257cc50044e809/Technical%20reference%20manual_RAPID_3HAC16581-1_revJ_en.pdf (accessed on 15 December 2022).
- RobotStudio. Available online: https://new.abb.com/products/robotics/robotstudio/robotstudio-desktop (accessed on 15 December 2022).
- 5 Key Reasons Why the Fanuc CRX Collaborative Robot Is Right for Everyone. Available online: https://crx.fanucamerica.com/why-cobots-collaborative-robots/ (accessed on 15 December 2022).
- Programming a Robot Is Child’s Play. Available online: https://www.festo.com/us/en/e/journal/programming-a-robot-as-child-s-play-id_28594/ (accessed on 16 December 2022).
- iiQKA: Robots for the People. Available online: https://www.kuka.com/en-au/future-production/iiqka-robots-for-the-people (accessed on 16 December 2022).
- User-Friendly Touchscreen Teach Pendant for Novice Robot Users. Available online: https://www.motoman.com/en-us/products/programming/smart-pendant (accessed on 16 December 2022).
- HC Series Cobots—Your New Work Assistants. Available online: https://www.yaskawa.eu.com/products/robots/cobot (accessed on 16 December 2022).
- Motoman NX100 Controller. Inform II User’s Manual. Available online: http://www.wtech.com.tw/public/download/manual/yaskawa/NX100/YASKAWA%20NX100%20INFORM%20II%20USER%20Manual.pdf (accessed on 3 January 2023).
- Automation Control Environment (ACE) Version 4 User Manual. Available online: https://www.edata.omron.com.au/eData/Robotics/I633-E-04.pdf (accessed on 10 December 2022).
- RoboDK Basic Guide. Available online: https://robodk.com/doc/en/Basic-Guide.html (accessed on 4 January 2023).
- Why Is It Worth Using…ArtiMinds Robot Programming Software Solutions? Available online: https://www.artiminds.com/robot-programming-software/ (accessed on 18 December 2022).
- Wandelbots. Everyone Can Work with Robots. Available online: https://wandelbots.com/en/ (accessed on 5 January 2023).
- Pickit. Guide your Robot. Available online: https://www.pickit3d.com/en (accessed on 5 January 2023).
- Robotmaster Offline Programming Software for Robots. Available online: https://www.robotmaster.com/en (accessed on 6 January 2023).
- Universal Robots. Simplify Robot Programming with G-Code. Available online: https://www.universal-robots.com/blog/simplify-robot-programming-with-g-code/ (accessed on 5 January 2023).
- ROS—Robot Operating System. Available online: https://www.ros.org/ (accessed on 7 January 2023).
- Plant Automation Technology. Different Types of Robot Programming Languages. Available online: https://www.plantautomation-technology.com/articles/different-types-of-robot-programming-languages (accessed on 12 December 2022).
- U.S. Social Security Administration. Code Of Federal Regulations. 404.1568. Skills Requirements. Available online: https://www.ssa.gov/OP_Home/cfr20/404/404-1568.htm (accessed on 2 February 2023).
- Schou, C.; Madsen, O. A plug and produce framework for industrial collaborative robots. Int. J. Adv. Robot. Syst. 2017, 14, 1729881417717472. [Google Scholar] [CrossRef] [Green Version]
- Heimann, O.; Guhl, J. Industrial robot programming methods: A scoping review. In Proceedings of the 2020 25th IEEE International Conference on Emerging Technologies and Factory Automation, Vienna, Austria, 8–11 September 2020; IEEE: New York, NY, USA, 2020; Volume 1, pp. 696–703. [Google Scholar]
- Weintrop, D.; Afzal, A.; Salac, J.; Francis, P.; Li, B.; Shepherd, D.C.; Franklin, D. Evaluating CoBlox: A comparative study of robotics programming environments for adult novices. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–26 April 2018; pp. 1–12. [Google Scholar]
- Codejig. Block Coding. Available online: https://www.codejig.com/en/block-based-coding (accessed on 10 January 2023).
- Fogli, D.; Gargioni, L.; Guida, G.; Tampalini, F. A Hybrid Approach to User-Oriented Programming of Collaborative Robots. Robot. Comput.-Integr. Manuf. 2022, 73, 102234. [Google Scholar] [CrossRef]
- GitHub. Your AI Pair Programmer GitHub Copilot. Available online: https://github.com/features/copilot/ (accessed on 17 February 2023).
- Borboni, A.; Reddy, K.V.; Elamvazuthi, I.; AL-Quraishi, M.S.; Natarajan, E.; Azhar Ali, S.S. The Expanding Role of Artificial Intelligence in Collaborative Robots for Industrial Applications: A Systematic Review of Recent Works. Machines 2023, 11, 111. [Google Scholar] [CrossRef]
- Hiltner, J. Self-learning Intelligence for Object Recognition. Quality, 1 July 2019. [Google Scholar]
- De Marchi, M.; Gualtieri, L.; Rojas, R.A.; Rauch, E.; Cividini, F. Integration of an Artificial Intelligence Based 3D Perception Device into a Human-Robot Collaborative Workstation for Learning Factories. In Proceedings of the 11th Conference on Learning Factories (CLF), Graz, Austria, 31 June–2 July 2021. [Google Scholar]
- Bai, Y.; Lindqvist, B.; Karlsson, S.; Kanellakis, C.; Nikolakopoulos, G. Multi-Robot Task Allocation Framework with Integrated Risk-Aware 3D Path Planning. In Proceedings of the 2022 30th Mediterranean Conference on Control and Automation (MED), Athens, Greece, 28 June–1 July 2022; IEEE: New York, NY, USA, 2022; pp. 481–486. [Google Scholar]
- Kaczmarek, W.; Panasiuk, J.; Borys, S.; Banach, P. Industrial robot control by means of gestures and voice commands in off-line and on-line mode. Sensors 2020, 20, 6358. [Google Scholar] [CrossRef]
- Mendes, N.; Safeea, M.; Neto, P. Flexible programming and orchestration of collaborative robotic manufacturing systems. In Proceedings of the 2018 IEEE 16th International Conference on Industrial Informatics, Porto, Portugal, 18–20 July 2018; IEEE: New York, NY, USA, 2018; pp. 913–918. [Google Scholar]
- Pérez, L.; Diez, E.; Usamentiaga, R.; García, D.F. Industrial robot control and operator training using virtual reality interfaces. Comput. Ind. 2019, 109, 114–120. [Google Scholar] [CrossRef]
- Psarakis, L.; Nathanael, D.; Marmaras, N. Fostering short-term human anticipatory behavior in human-robot collaboration. Int. J. Ind. Ergon. 2022, 87, 103241. [Google Scholar] [CrossRef]
- De Pace, F.; Manuri, F.; Sanna, A.; Fornaro, C. A systematic review of Augmented Reality interfaces for collaborative industrial robots. Comput. Ind. Eng. 2020, 149, 106806. [Google Scholar] [CrossRef]
- Ong, S.K.; Yew, A.W.W.; Thanigaivel, N.K.; Nee, A.Y. Augmented reality-assisted robot programming system for industrial applications. Robot. Comput.-Integr. Manuf. 2020, 61, 101820. [Google Scholar] [CrossRef]
- Introducing Wizard Easy Programming. Available online: https://youtu.be/2l-IKmdcJsM (accessed on 18 December 2022).
- Omron Adept Robot Programming: It’s That Easy! Available online: https://www.youtube.com/watch?v=9Y-3i0I07Bc (accessed on 18 December 2022).
- Robotiq. Skills to Integrate a Robot. Available online: https://blog.robotiq.com/skills-to-integrate-a-robot?_ga=2.195912812.1784018681.1676172069-1475687650.1676171346 (accessed on 30 January 2023).
- Doyle-Kent, M.; Kopacek, P. Adoption of collaborative robotics in industry 5.0. An Irish industry case study. IFAC-Pap. 2021, 54, 413–418. [Google Scholar] [CrossRef]
- Gjeldum, N.; Aljinovic, A.; Crnjac Zizic, M.; Mladineo, M. Collaborative robot task allocation on an assembly line using the decision support system. Int. J. Comput. Integr. Manuf. 2022, 35, 510–526. [Google Scholar] [CrossRef]
- Universal Robots. The UR5e. Available online: https://www.universal-robots.com/products/ur5-robot/ (accessed on 10 October 2022).
- Park, J.; Jung, W. A study on the development of a task complexity measure for emergency operating procedures of nuclear power plants. Reliab. Eng. Syst. Saf. 2007, 92, 1102–1116. [Google Scholar] [CrossRef]
- Park, J.; Jang, I. Can we determine the complexity level of a proceduralized task? In Proceedings of the Transactions of the Korean Nuclear Society Virtual Spring Meeting, Jeju, Korea, 13–14 May 2021.
- Kirschgens, L.A.; Ugarte, I.Z.; Uriarte, E.G.; Rosas, A.M.; Vilches, V.M. Robot hazards: From safety to security. arXiv 2018, arXiv:1806.06681. [Google Scholar]






| Cobot Task | General Application Description |
|---|---|
| Welding | Joining of metal parts, typically with a MIG welding (automatic welding wire feed) process |
| Machining | Precision surfacing process involving a milling or cutting tool |
| Deburring | Removal of waste material from casting or machining processes with an abrasive tool |
| Polishing | Treatment to remove surface irregularities or attain a lustre to coated or machined surfaces |
| Spray Painting | Part coating, applied to protect or otherwise enhance surface appearance |
| Sorting | Practical categorisation of unsorted parts for kitting, classification or other organisational operation |
| Pick & Place | Moving components from a starting point to an endpoint for assembly or other processes |
| Stacking | Moving finished products from a production line to a pallet or other storage location |
| Machine Tending | Inserting billets or parts into a milling machine, lathe, etc. and retrieving machined or processed components |
| Inspection/Measurement | Analysis or quality assurance process where parts and other sub-assemblies or components are measured with sensors or by other means to ensure they are within an acceptable tolerance range |
| Feature | Traditional Industrial Robot | Collaborative Robot |
|---|---|---|
| Engagement with humans | Segregated. Operates within a protective barrier, away from humans | Interactive. Operates collaboratively with humans |
| Safety near humans | Not safe. Must work separately | Safe to work with humans |
| Environmental awareness | Cannot dynamically adapt behaviour | Can adapt to changes in the environment |
| Programming flexibility and complexity | Fixed, rudimentary use case programs. Typically reprogrammed infrequently | Flexible, customised use case programs. Potentially reprogrammed frequently |
| Ease of implementation | Arduous. Requires fixed infrastructure | Fast set-up and easy deployment |
| Operational behaviour | Fast and repetitious, mainly task focused | Slow and varied. Focus on task and environment |
| Footprint/Portability | Large footprint, fixed location | Small footprint, mobile |
| Purchase cost | Relatively expensive to purchase | Relatively inexpensive to purchase |
| Profitability | Needs medium to large-volume production | Profitable at low-volume production |
| Investment prospect | Slow return on investment | Fast return on investment |
| Programming Layer | Roles and expertise | Required Training | Support Techniques |
|---|---|---|---|
| Layer 1: Basic assembly workflows (robot movements and tool actuation) | Assembly workers and laypersons with some assembly experience | Some technical training (e.g., professional school) | Mounting and assembly devices, multimodal teach-in |
| Layer 2: Block-based programs (task blocks, variables and control structures) | Industrial engineers with computational thinking abilities and technical intuition | Formal technical training and a programming course | CAD-modelling, 3D printing, laser cutting |
| Layer 3: Advanced functionality (databases, connectivity, etc.) | Software engineers with advanced programming skills | Formal software engineering training | Internet/intranet, databases, cloud, Manufacturing Execution System (MES) |
| 1. Universal Robots (PolyScope) [60] |
| “Use your process expertise and PolyScope’s graphical interface to create a robust automation system. No Code? No Problem.” |
| “PolyScope connects operators to robots for efficient and productive automation. You don’t need coding experience to automate your processes.” |
| “Build programs by selecting nodes from a menu and placing them in order of operation. Each node represents an instruction for the robot and its parameters can be configured.” |
| 2. ABB (Wizard) [62] |
| “Wizard easy programming—An easy and intuitive way to program cobots and Industrial robots.” |
| “Program your robot application within minutes! Wizard is an easy graphical programming interface for ABB Cobots.” |
| “With Wizard, anyone and everyone can program their robot application.” |
| “Only a few minutes after the installation you will be able to operate your robot. With Wizard’s easy drag and drop blockly based programming software, no specialized training or programming skills are required.” |
| 3. Fanuc (TP) [65] |
| “But the CRX’s #1 “Ease of Use” benefit is its Simple Drag and Drop Programming. 30 years ago, robot programming was a high-level structured language like Fortran or C++. An engineer or maintenance technician went to school to learn how to learn the programming language. Both are very powerful, but not easy to use. With the all new FANUC CRX Tablet Teach Pendant–simple programming becomes reality. Easily program and teach points with the CRX Tablet Teach Pendant. The drag and drop interface for lead-through teaching and simple programming is easy with no prior robotic experience needed.” |
| 4. Festo (Festo Robotic Suite for BionicCobot) [66] |
| “Programming a robot is child’s play” |
| “The BionicCobot is operated intuitively via a graphic user interface developed in-house.” |
| “Commissioning and programming are intuitive, quick and easy with the “Robotic Suite” software.” |
| “The developers were focusing specifically on making the Robotic Suite, the actual heart of the cobot, as simple to operate as possible so there is no need for prior programming knowledge.” |
| “When it comes to programming, most of us probably think about complicated lines of code with lots of abbreviations, brackets and other symbols. But programming a robot can actually be very easy, as is shown by the software that Festo developed for its pneumatic lightweight robot, the BionicCobot.” |
| 5. Kuka (iiQKA OS) [67] |
| “iiQKA allows you to put together your individual automation package, without any prior knowledge or programming experience.” |
| “The intuitive graphical interface allows for fully autonomous control of the system without any programming knowledge.” |
| “Designed for quick start-up with little to no expertise, iiQKA offers incredible speed to integrate robots.” |
| 6. Yaskawa (DT) [68,69] |
| “Quick and easy programming.” |
| “Simple and intuitive operator control, short learning curve.” |
| “Ideal for users who need to carry out frequent reprogramming and thus appreciate simple operator control.” |
| “Ideal for novice robot users, this pendant simplifies INFORM programming for easy-to-understand operation and fast implementation of the robot system.” |
| “The perfect entry into programming. Simply move the robot flange by hand, record the motion points and operate the gripper actuation by pressing the respective DT buttons. The code is automatically generated in the background on your pendant.” |
| 7. Omcron (ACE) [71] |
| “The Automation Control Environment (ACE) software allows you to build applications, such as Pack Manager packaging applications, which can be basic pick-and-place cells or complex cells with multiple cameras, conveyors, and robots. You can create and configure these cells without having to write any programming code. For applications that require greater control, you can override the default V+ program code and make changes as needed.” |
| Skill Level Designation | Description of Skill Level |
|---|---|
| 0: Unskilled | No knowledge of robotic operation or programming |
| 1–3 R: Basic Robotics | Basic knowledge of robotic concepts, such as the difference between collaborative and industrial robots, the joint structure of a manipulator (robotic arm) and basic understanding of end effectors such as a gripper or suction cup |
| 4–6 R: Mid Robotics | Familiar with robotic movement and functionality, including linear and non-linear joint movement, consequences of joint speed and acceleration settings (collision prevention) and coordinate frames |
| 7–10 R: High Robotics | In-depth knowledge of robotics, with practical skills in cobot installation, tool configuration with respect to coordinate frames, precise joint configuration, I/O signals, sensors and configuration of safety elements such as protection zones |
| 1–3 P: Basic Programming | Basic knowledge of programming concepts, such as data types, data inputs, computations and outputs |
| 4–6 P: Mid Programming | Familiar with basic programming techniques involving common elements such as variables, loops and conditionals |
| 7–10 P: High Programming | Competent in structured programming, using functions, different loop and conditional types, switch statements and classes |
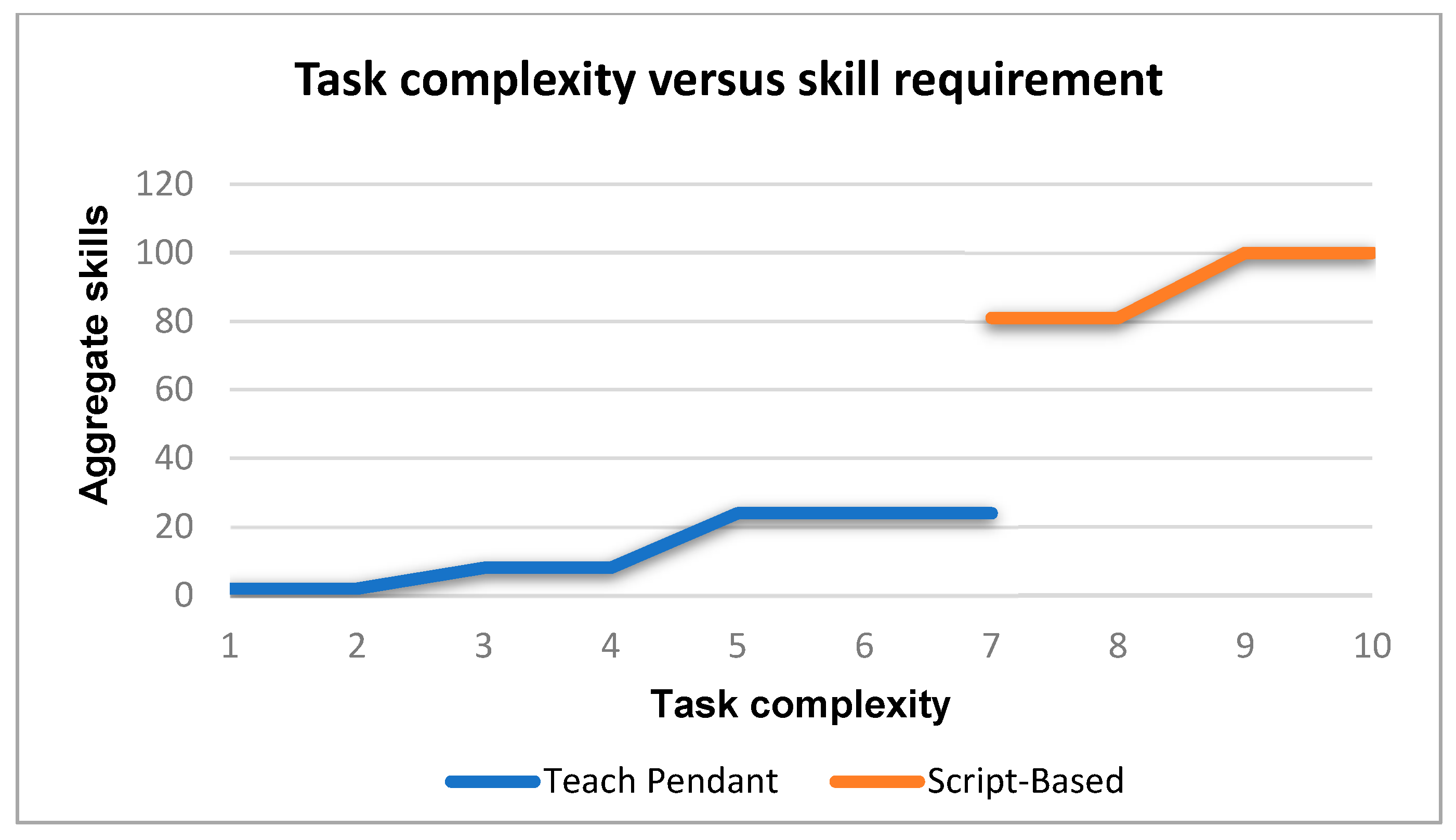
| Task Complexity Level | Programmed Task | Programming Method | Robotic Skill Level | Programming Skill Level | Aggregate Skill Level |
|---|---|---|---|---|---|
| 1–2 (Low) | Simple Polishing | Teach Pendant | 2 | 1 | 2 |
| 2–4 (Low–medium) | Simple Pick and Place | Teach Pendant | 4 | 2 | 8 |
| 5–6 (Medium) | Simple Assembly | Teach Pendant | 6 | 4 | 24 |
| 7–8 (Medium–high) | Parts Insertion | Teach Pendant | 6 | 4 | 24 |
| 7–8 (Medium–high) | Parts Insertion | Script-based | 9 | 9 | 81 |
| 9–10 (High) | Complex Assembly | Script-based | 10 | 10 | 100 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
George, P.; Cheng, C.-T.; Pang, T.Y.; Neville, K. Task Complexity and the Skills Dilemma in the Programming and Control of Collaborative Robots for Manufacturing. Appl. Sci. 2023, 13, 4635. https://doi.org/10.3390/app13074635
George P, Cheng C-T, Pang TY, Neville K. Task Complexity and the Skills Dilemma in the Programming and Control of Collaborative Robots for Manufacturing. Applied Sciences. 2023; 13(7):4635. https://doi.org/10.3390/app13074635
Chicago/Turabian StyleGeorge, Peter, Chi-Tsun Cheng, Toh Yen Pang, and Katrina Neville. 2023. "Task Complexity and the Skills Dilemma in the Programming and Control of Collaborative Robots for Manufacturing" Applied Sciences 13, no. 7: 4635. https://doi.org/10.3390/app13074635