

Main Factors on Effect of Precise Measurement and Precise Tamping Based on BP Neural Network


Abstract
:1. Introduction
2. Related Work
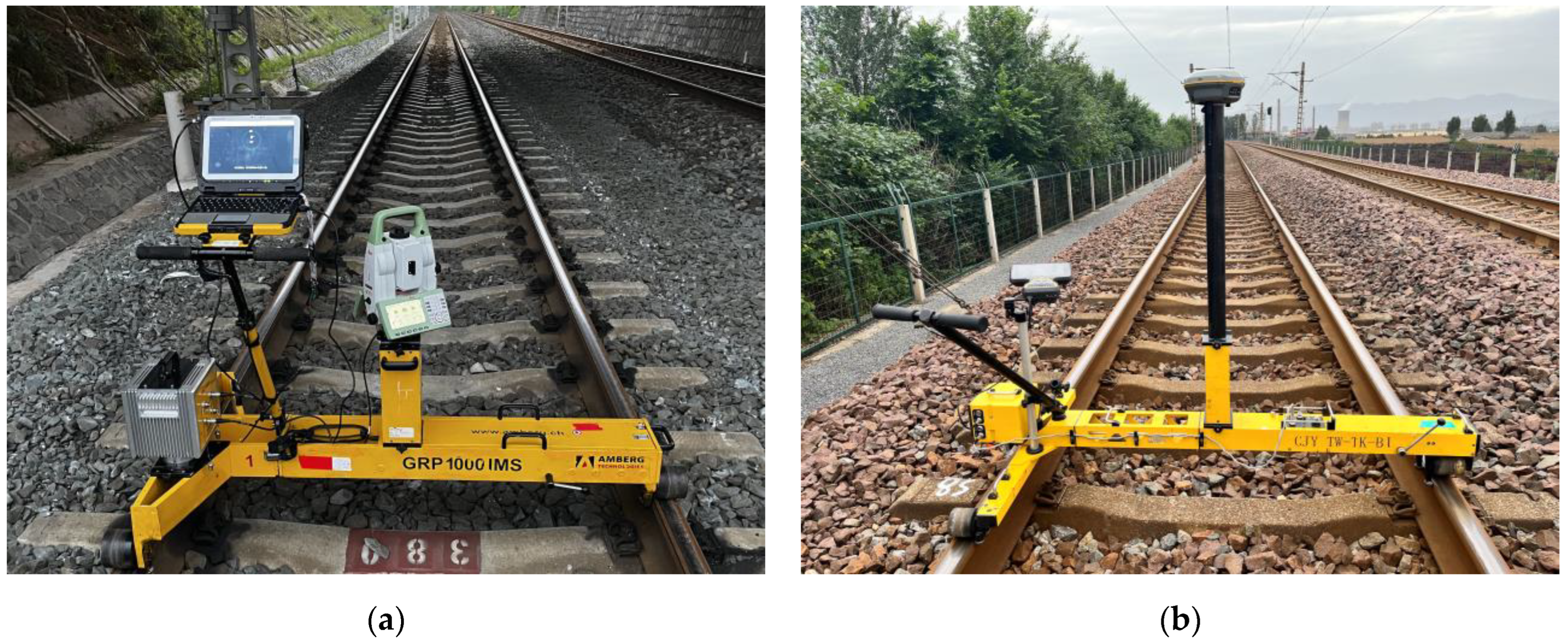
2.1. The PMPT Operation Mode Database
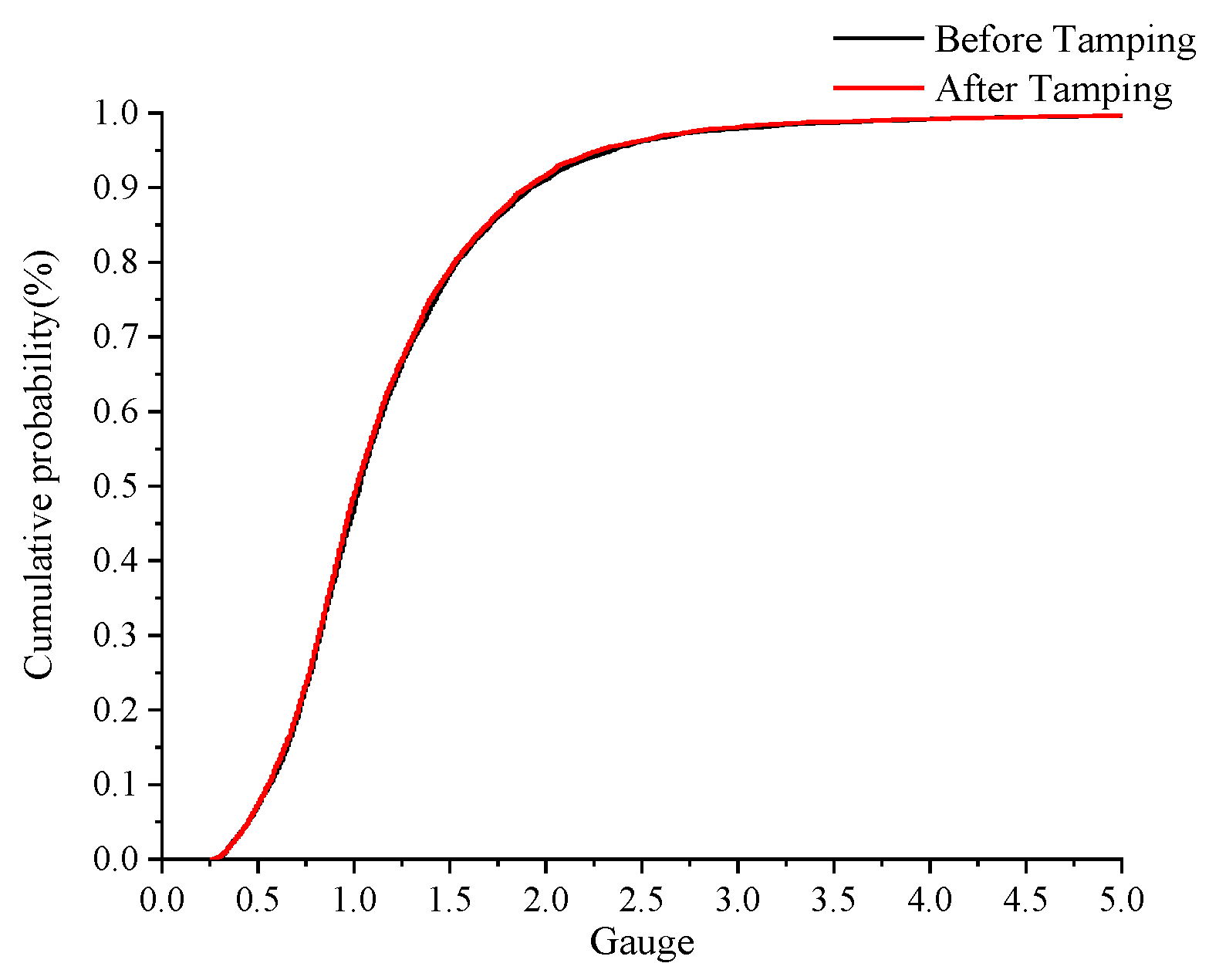
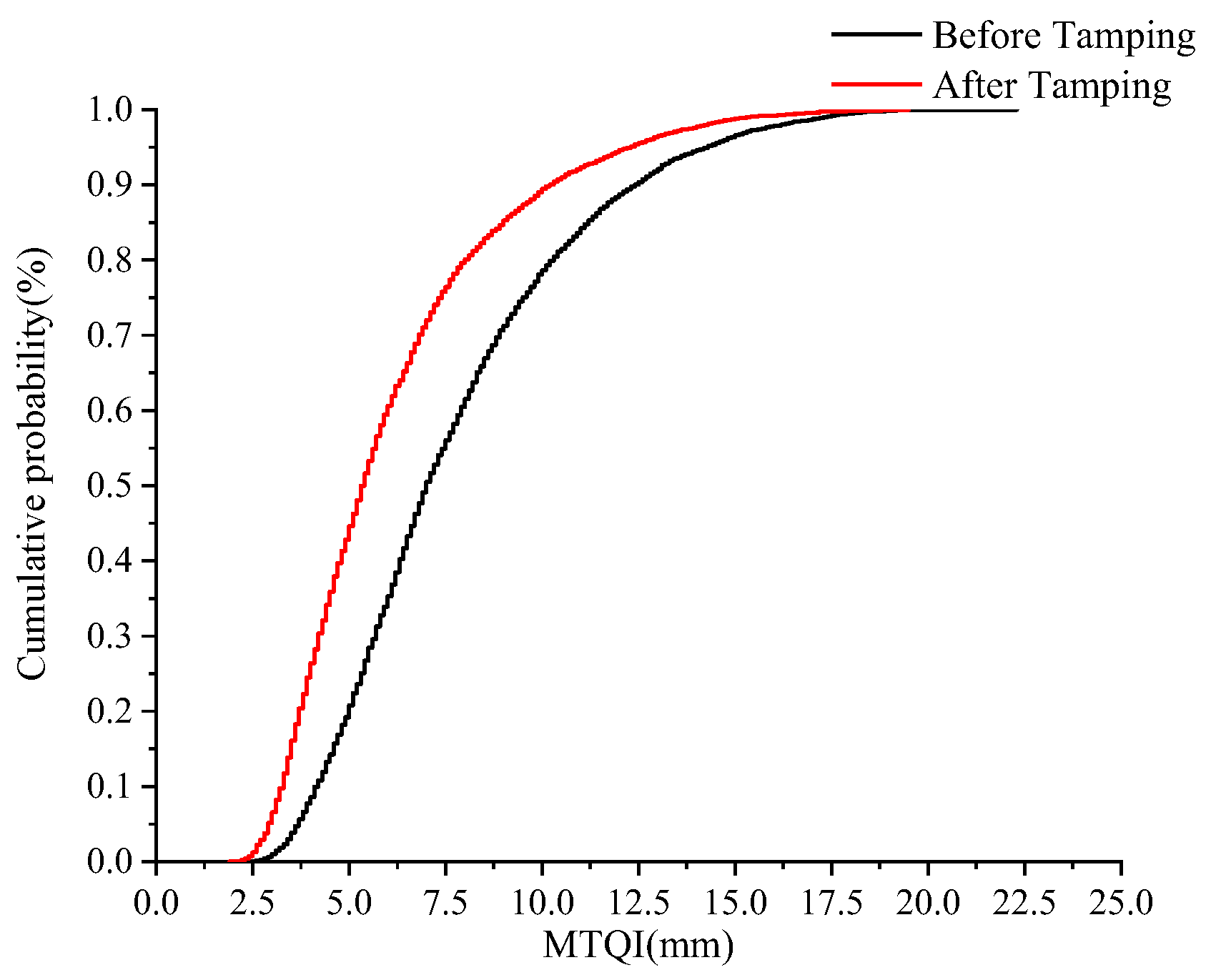
2.2. Operation Effect Evaluation Index
2.3. Selection of Main Influencing Factors
- X2 is the tamping mode. There are four main tamping modes used in field operation, and different tamping modes have different quality effects after operation.
- X3 is the model of the tamping machine. The main models of heavy-duty tamping machine used in China are the DWL-48 and DCL-32.
- X4 is whether it has a stabilizer or not, which refers to whether there is stabilizing operation during the tamping operation.
- X5 is the stabilizing operation frequency, which refers to the vibration frequency used in the stabilizing operation, which is mainly classified into 0 Hz (without stabilizing), 0~25 Hz, and 25~40 Hz. The compactness of the ballast bed after operation varies with different stabilizing operation frequencies [12].
- X6 is track quality before tamping, MTQIbf.
3. Model Building
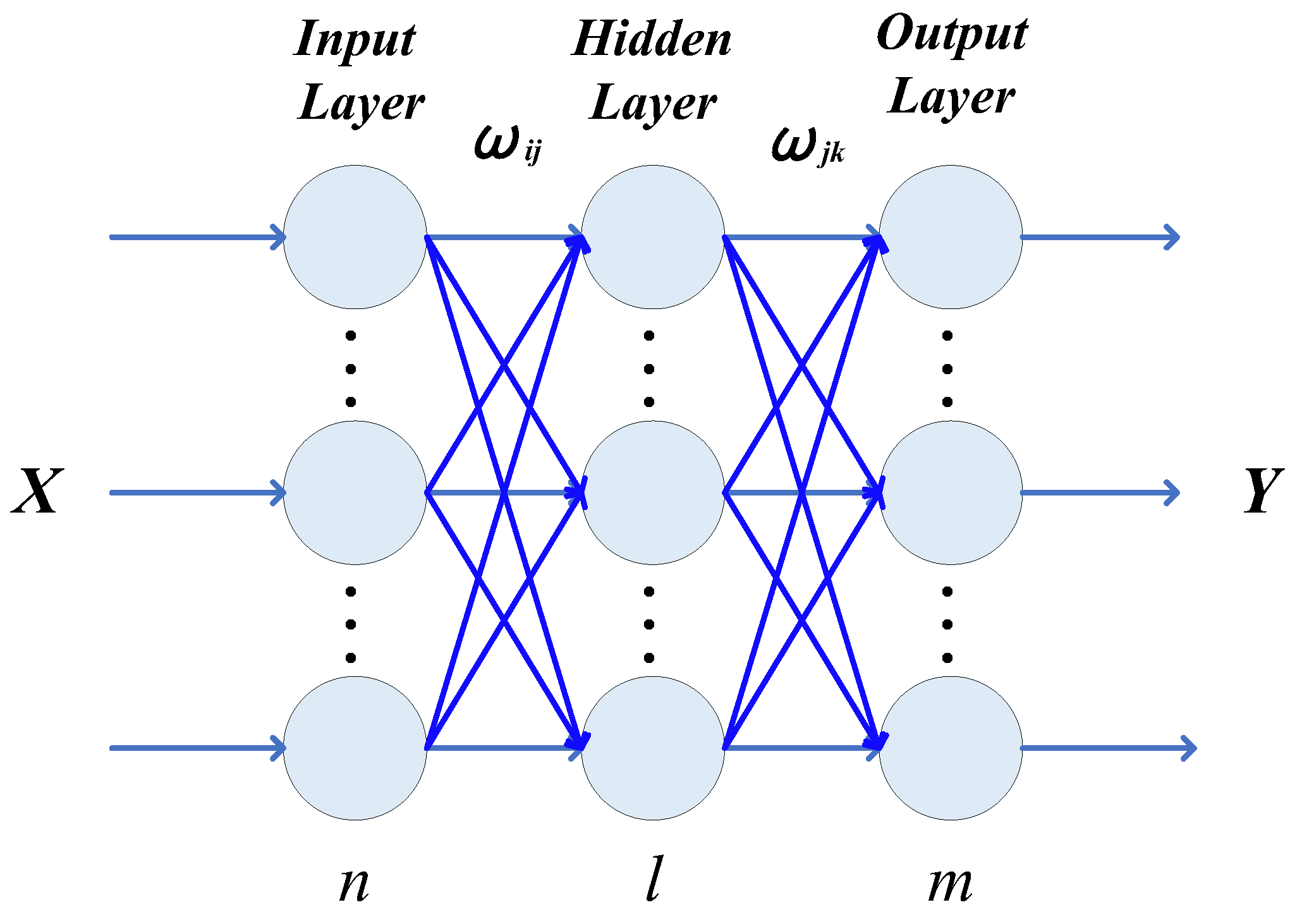
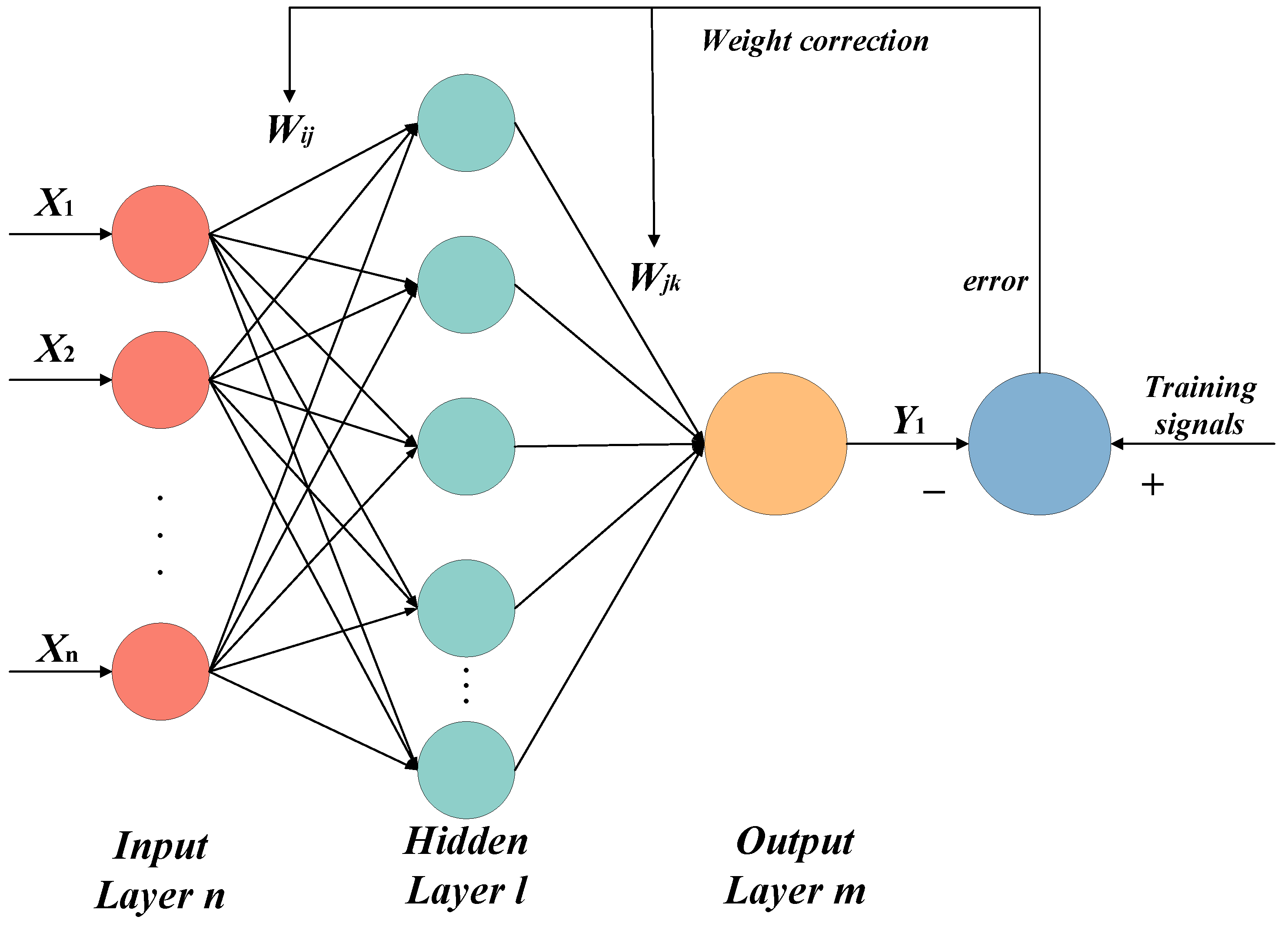
3.1. BPNN Training Model
3.1.1. Statistical Index
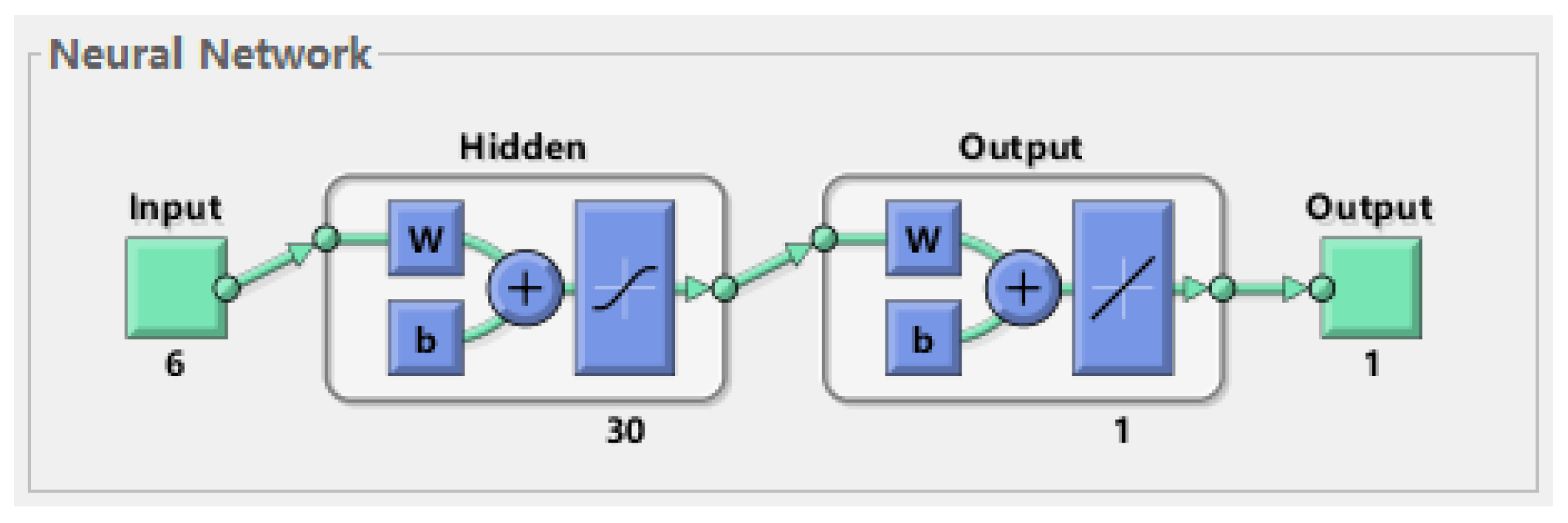
3.1.2. Selecting Model Parameters
- a.
- The number of neurons in the hidden layer: l = 30. Selecting 30 hidden layers not only makes the results more accurate, but also has high computational efficiency.
- b.
- Input normalized; output not normalized;
- c.
- Hidden layer activation function: tansig;
- d.
- Output layer activation function: purelin;
- e.
- The learning rate of the BPNN is set to 0.01;
- f.
- The epoch of the BPNN is set to 100.

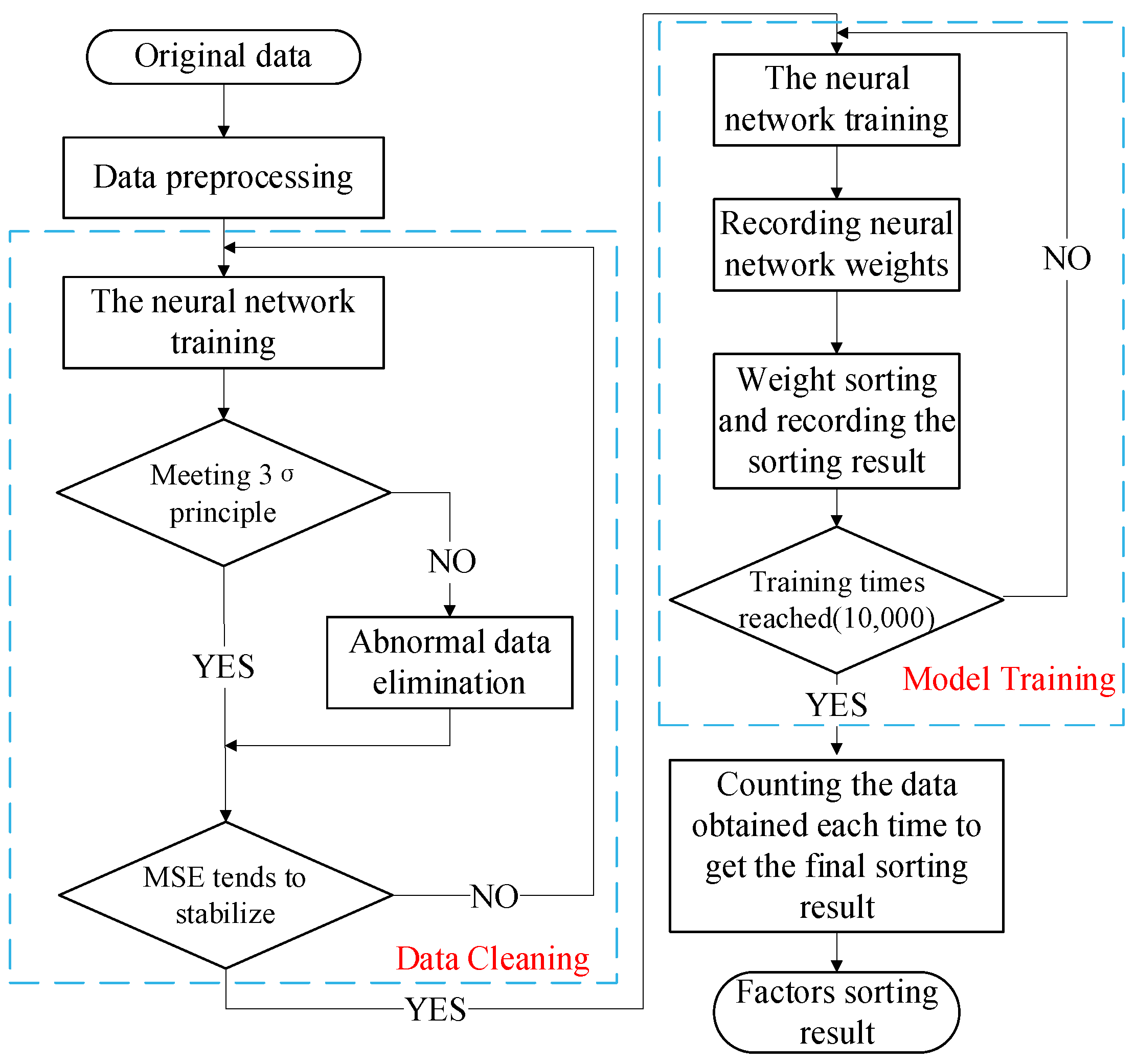
3.1.3. Model Training Step
3.2. Abnormal Data Cleaning
3.3. Calculation Method of Influence Factor Weight
4. Case Analysis
4.1. Original Data Source
4.2. Data Preprocessing
4.3. Data Cleaning
4.4. Neural Network Training
4.4.1. Splitting the Dataset
4.4.2. Model Training
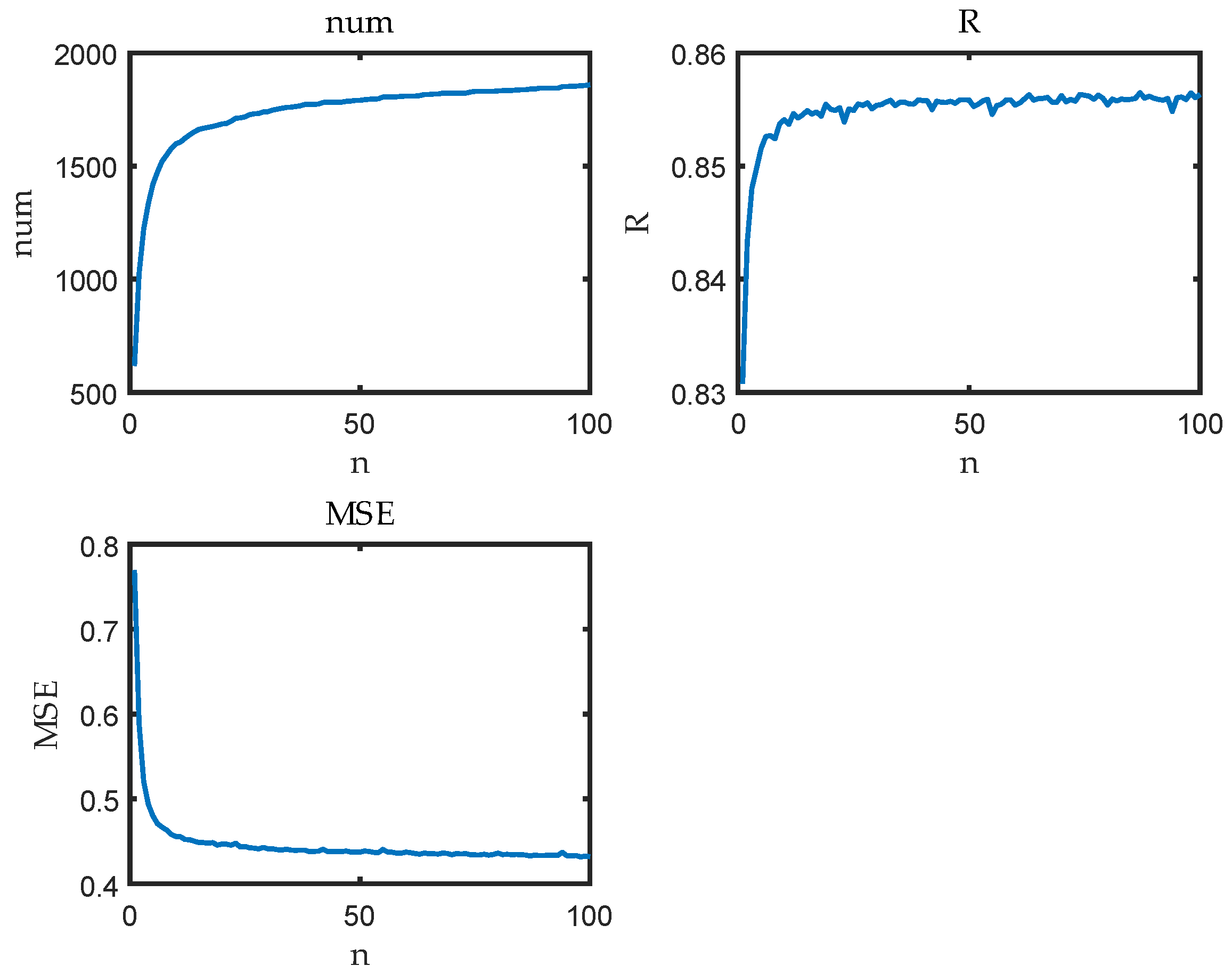
4.4.3. Evaluation Index
4.5. Result
5. Discussions
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Qu, J. Research on Prediction Method of Warranty Period of Track Quality Based on Tamping Modes Using Large Tamping Machine. J. China Railw. Soc. 2019, 41, 117–122. [Google Scholar] [CrossRef]
- Khouy, I.A.; Larsson-Kråik, P.-O.; Nissen, A.; Juntti, U.; Schunnesson, H. Optimisation of track geometry inspection interval. Proc. IMechE Part F 2014, 228, 546–556. [Google Scholar] [CrossRef]
- Martey, E.; Attoh-Okine, N. Modeling tamping recovery of track geometry using the copula-based approach. Proc. IMechE Part F 2018, 232, 2079–2096. [Google Scholar] [CrossRef]
- Chen, Q.; Niu, X.; Zuo, L.; Zhang, T.; Xiao, F.; Liu, Y.; Liu, J. A Railway Track Geometry Measuring Trolley System Based on Aided INS. Sensors 2018, 18, 538. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sánchez, A.; Bravo, J.L.; González, A. Estimating the Accuracy of Track-Surveying Trolley Measurements for Railway Maintenance Planning. J. Surv. Eng. 2017, 143, 05016008. [Google Scholar] [CrossRef]
- Luo, Y.; Liu, C.; Yang, X.; He, Y.; Song, T. A New Method for Establishment of Plane Network of Ordinary Conventional-speed Railway Track Control Network and its Accuracy Discussion. J. Railw. Sci. Eng. 2014, 11, 55–59. [Google Scholar] [CrossRef]
- Chen, Q.; Niu, X.; Zhang, Q.; Cheng, Y. Railway Track Irregularity Measuring by GNSS/INS Integration. Navigation 2015, 62, 83–93. [Google Scholar] [CrossRef]
- Nielsen, J.C.; Berggren, E.G.; Hammar, A.; Jansson, F.; Bolmsvik, R. Degradation of railway track geometry–Correlation between track stiffness gradient and differential settlement. Proc. IMechE Part F 2020, 234, 108–119. [Google Scholar] [CrossRef]
- Zhang, M.N.; Wu, Y.B.; Ma, X.C.; Wang, P. Influence of Large Track Maintenance Machine on Sleeper Supporting Stiffness. Adv. Mat. Res. 2014, 919–921, 1115–1119. [Google Scholar] [CrossRef]
- Zhou, T.Y.; Hu, B.; Yan, B.; Peng, Y.X. Study on Motion Parameters of Tamping Operation. Adv. Mat. Res. 2013, 694–697, 154–157. [Google Scholar] [CrossRef]
- Rhayma, N.; Bressolette, P.; Breul, P.; Fogli, M.; Saussine, G. Reliability analysis of maintenance operations for railway tracks. Reliab. Eng. Syst. Saf. 2013, 114, 12–25. [Google Scholar] [CrossRef]
- Wang, X.J.; Geng, X.L. Study on the Effects of Tamping Frequency to the Compaction Degree of Trackbeds. Appl. Mech. Mater. 2012, 178–181, 1387–1391. [Google Scholar] [CrossRef]
- Zhou, T.Y.; Hu, B.; Wang, X.J.; Yan, B. Discrete Element Method Analysis of Mechanical Properties of Railway Ballast during Tamping Process under Different Amplitude. Appl. Mech. Mater. 2012, 233, 224–227. [Google Scholar] [CrossRef]
- Guo, Y.; Markine, V.; Jing, G. Review of ballast track tamping: Mechanism, challenges and solutions. Constr. Build. Mater. 2021, 300, 123940. [Google Scholar] [CrossRef]
- Jadidirendi, K.; Zakeri, J.A.; Teng, H. Field Investigation for Identifying the Effects of Dynamic Track Stabilizing Operation on Track Geometrical Indices. In Proceedings of the 2015 Joint Rail Conference, San Jose, CA, USA, 23–26 March 2015. [Google Scholar] [CrossRef]
- Selig, E.; Waters, J. Track Geotechnology and Substructure Management; Thomas Telford: London, UK, 1994; Available online: https://www.icevirtuallibrary.com/doi/book/10.1680/tgasm.20139 (accessed on 20 October 2022).
- Esveld, C. Modern Railway Track; MRT-Productions Zaltbommel: Zaltbommel, The Netherlands, 2001. [Google Scholar]
- Offenbacher, S.; Koczwara, C.; Landgraf, M.; Marschnig, S. A Methodology Linking Tamping Processes and Railway Track Behaviour. Appl. Sci. 2023, 13, 2137. [Google Scholar] [CrossRef]
- Neuhold, J. Tamping within Sustainable Track Asset Management; Verlag der Technischen Universität Graz: Graz, Austria, 2020. [Google Scholar]
- Khajehei, H.; Ahmadi, A.; Soleimanmeigouni, I.; Haddadzade, M.; Nissen, A.; Jebelli, M. Prediction of track geometry degradation using artificial neural network: A case study. Int. J. Rail. Trans. 2022, 10, 24–43. [Google Scholar] [CrossRef]
- Sadeghi, J.; Askarinejad, H. Application of neural networks in evaluation of railway track quality condition. J. Mech. Sci. Technol. 2012, 26, 113–122. [Google Scholar] [CrossRef]
- Sresakoolchai, J.; Kaewunruen, S. Track Geometry Prediction Using Three-Dimensional Recurrent Neural Network-Based Models Cross-Functionally Co-Simulated with BIM. Sensors 2023, 23, 391. [Google Scholar] [CrossRef] [PubMed]
- Shafahi, Y.; Masoudi, P.; Hakhamaneshi, R. Track Degradation Prediction Models, Using Markov Chain, Artificial Neural and Neuro-Fuzzy Network. In Proceedings of the 8th World Congress on Railway Research, Seoul, Republic of Korea, 18–22 May 2008; pp. 1–9. Available online: https://www.researchgate.net/publication/268011897 (accessed on 12 March 2023).
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. Available online: https://www.nature.com/articles/nature14539 (accessed on 20 October 2022). [CrossRef] [PubMed]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Output Layer | Hidden Layer | The Number of Neurons in Hidden Layer | R | k | MSE |
|---|---|---|---|---|---|
| purelin | sigmoid | 10 | 0.80841 | 0.655 | 1.38917 |
| 20 | 0.81167 | 0.665 | 1.36820 | ||
| 30 | 0.81265 | 0.667 | 1.36610 | ||
| 50 | 0.81387 | 0.669 | 1.35414 | ||
| poslin | 10 | 0.79767 | 0.636 | 1.45859 | |
| 20 | 0.80408 | 0.646 | 1.41714 | ||
| 30 | 0.80706 | 0.649 | 1.40782 | ||
| 50 | 0.81117 | 0.662 | 1.37169 | ||
| purelin | 10 | 0.74900 | 0.561 | 1.76048 | |
| 20 | 0.74897 | 0.555 | 1.76073 | ||
| 30 | 0.74902 | 0.557 | 1.76050 | ||
| 50 | 0.74906 | 0.560 | 1.75990 | ||
| tansig | 10 | 0.80639 | 0.652 | 1.40226 | |
| 20 | 0.81199 | 0.665 | 1.36627 | ||
| 30 | 0.81201 | 0.665 | 1.36635 | ||
| 50 | 0.81211 | 0.666 | 1.36640 |
| Output Layer | Hidden Layer | The Number of Neurons in Hidden Layer | R | k | MSE |
|---|---|---|---|---|---|
| purelin | sigmoid | 10 | 0.81044 | 0.659 | 1.37633 |
| 20 | 0.81307 | 0.667 | 1.35926 | ||
| 30 | 0.81328 | 0.667 | 1.35872 | ||
| 50 | 0.81342 | 0.670 | 1.35720 | ||
| poslin | 10 | 0.79514 | 0.635 | 1.47453 | |
| 20 | 0.80393 | 0.647 | 1.41840 | ||
| 30 | 0.80452 | 0.650 | 1.40821 | ||
| 50 | 0.80960 | 0.654 | 1.38164 | ||
| purelin | 10 | 0.74893 | 0.561 | 1.76071 | |
| 20 | 0.74890 | 0.563 | 1.76096 | ||
| 30 | 0.74893 | 0.561 | 1.76080 | ||
| 50 | 0.74895 | 0.562 | 1.76067 | ||
| tansig | 10 | 0.80783 | 0.657 | 1.39301 | |
| 20 | 0.81267 | 0.662 | 1.36202 | ||
| 30 | 0.81398 | 0.665 | 1.35420 | ||
| 50 | 0.81427 | 0.665 | 1.35219 |
| Measurement Method | Tamping Machine Model | Tamping Mode | Stabilized Track | Stabilizer Vibration Frequency | MTQIbf/mm | MTQIaf/mm | IR (%) |
|---|---|---|---|---|---|---|---|
| INS Trolley | DCL-32 | single tamping and single tamping and stabilizing | Yes | 0~25 Hz | 4.9 | 4.7 | 4.1 |
| INS Trolley | DWL-48 | single pass double tamping and stabilizing | Yes | 25~40 Hz | 8.6 | 7.1 | 17.4 |
| INS Trolley and GNSS | DCL-32 | single tamping | No | 0 Hz | 3.5 | 2.5 | 28.6 |
| INS Trolley and GNSS | DWL-48 | single tamping and stabilizing | Yes | 25~40 Hz | 3.4 | 2.5 | 26.5 |
| INS Trolley and CPⅢ | DCL-32 | single pass double tamping and stabilizing | Yes | 0~25 Hz | 5.9 | 4.4 | 25.4 |
| INS Trolley and CPⅢ | DWL-48 | single tamping | No | 0 Hz | 6.3 | 5.3 | 15.9 |
| Code | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| Tamping mode | single tamping | single tamping + stabilizing | single pass double tamping and stabilizing | single tamping and single tamping and stabilizing |
| Measurement method | INS Trolley | INS Trolley and GNSS | INS Trolley and CPⅢ | - |
| Stabilizer vibration frequency | 0 Hz | 25~40 Hz | 0~25 Hz | - |
| Tamping machine model | DCL-32 | DWL-48 | - | - |
| Stabilized track | No | Yes | - | - |
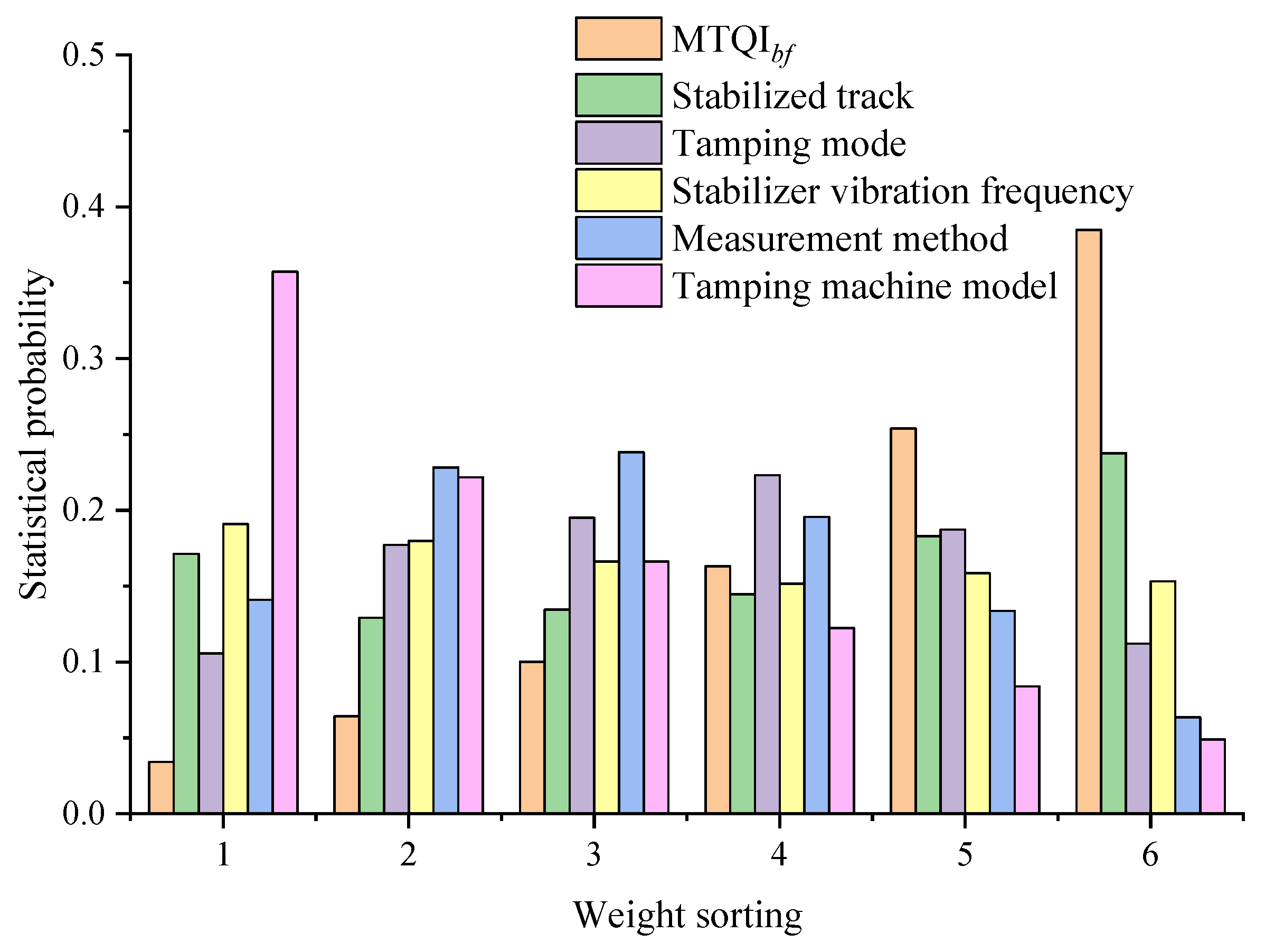
| Factors | MTQIbf | Stabilized Track | Tamping Mode | Stabilizer Vibration Frequency | Measurement Method | Tamping Machine Model | |
|---|---|---|---|---|---|---|---|
| Weight Sorting | |||||||
| 1 | 0.0341 | 0.1713 | 0.1055 | 0.1909 | 0.1410 | 0.3572 | |
| 2 | 0.0641 | 0.1291 | 0.1772 | 0.1798 | 0.2282 | 0.2216 | |
| 3 | 0.1001 | 0.1345 | 0.1950 | 0.1661 | 0.2382 | 0.1661 | |
| 4 | 0.1631 | 0.1446 | 0.2230 | 0.1515 | 0.1955 | 0.1223 | |
| 5 | 0.2539 | 0.1829 | 0.1872 | 0.1585 | 0.1336 | 0.0839 | |
| 6 | 0.3847 | 0.2376 | 0.1121 | 0.1532 | 0.0635 | 0.0489 | |
| Average sort | 4.6927 | 3.7515 | 3.5455 | 3.3665 | 3.1430 | 2.5008 | |
| Order | 1 | 2 | 3 | 4 | 5 | 6 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qu, J.; Liu, P.; Long, Y.; Xu, F. Main Factors on Effect of Precise Measurement and Precise Tamping Based on BP Neural Network. Appl. Sci. 2023, 13, 4273. https://doi.org/10.3390/app13074273
Qu J, Liu P, Long Y, Xu F. Main Factors on Effect of Precise Measurement and Precise Tamping Based on BP Neural Network. Applied Sciences. 2023; 13(7):4273. https://doi.org/10.3390/app13074273
Chicago/Turabian StyleQu, Jianjun, Pan Liu, Yiyu Long, and Fei Xu. 2023. "Main Factors on Effect of Precise Measurement and Precise Tamping Based on BP Neural Network" Applied Sciences 13, no. 7: 4273. https://doi.org/10.3390/app13074273