
Early Prediction of Remaining Useful Life for Rolling Bearings Based on Envelope Spectral Indicator and Bayesian Filter


Abstract
:1. Introduction
- It determines the first detection time of fault for life prediction based on envelope spectrum inspection for the XJTU-SY dataset.
- The bearing degradation indicator, ESI, is utilized for more realistic RUL prediction.
- Bearing RUL is predicted at the early fault stage based on EKF state estimation.
2. Experimental Settings
3. RUL Prediction Methodology
3.1. Envelope Analysis for Bearing Fault Detection
3.1.1. Signal Pre-Processing: High-Pass Filtering
3.1.2. Averaged Envelope Spectrum
3.1.3. Bearing FCFs for Fault Identification
3.2. The Envelope Spectral Indicator
3.3. First Detection Time, End-of-Life Time and RUL Prediction Time
3.3.1. First Detection Time (FDT) of Fault
3.3.2. End-of-Life (EOL) Time and EOL Threshold
3.3.3. RUL Prediction Time (PT)
3.4. Bayesian RUL Prediction Based on Extended Kalman Filter
3.4.1. Definition of Bearing RUL
3.4.2. Extended Kalman Filter
3.4.3. State Process Model for Bearing Degradation Estimation
3.4.4. EKF-Based RUL Prediction Algorithm
3.4.5. Uncertainty Estimation
4. Results and Observations
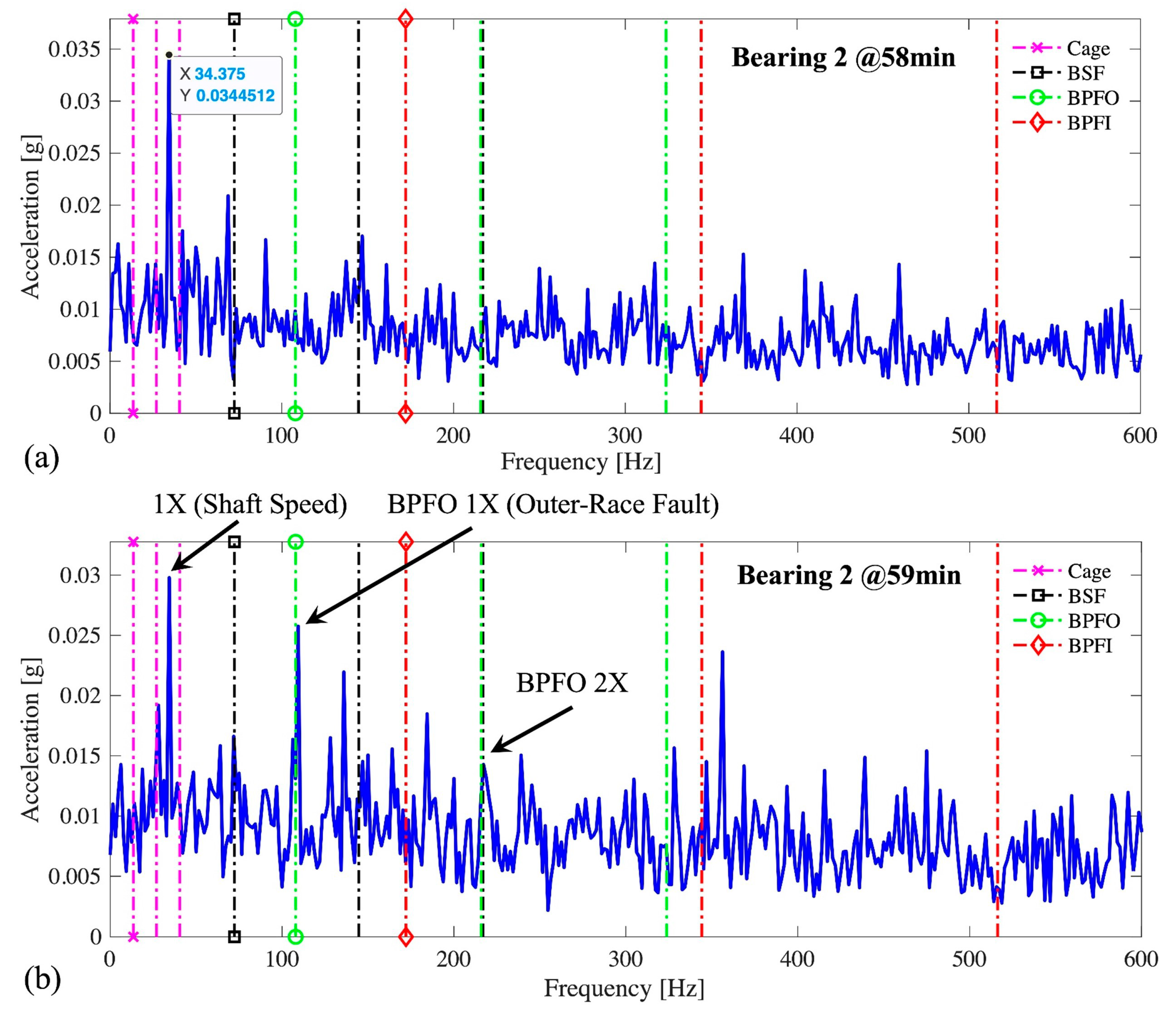
4.1. Fault Detection Based on Averaged Envelope Spectrum
4.2. Envelope Spectral Indicators
4.3. RUL Prediction of Test Bearings under Condition C1
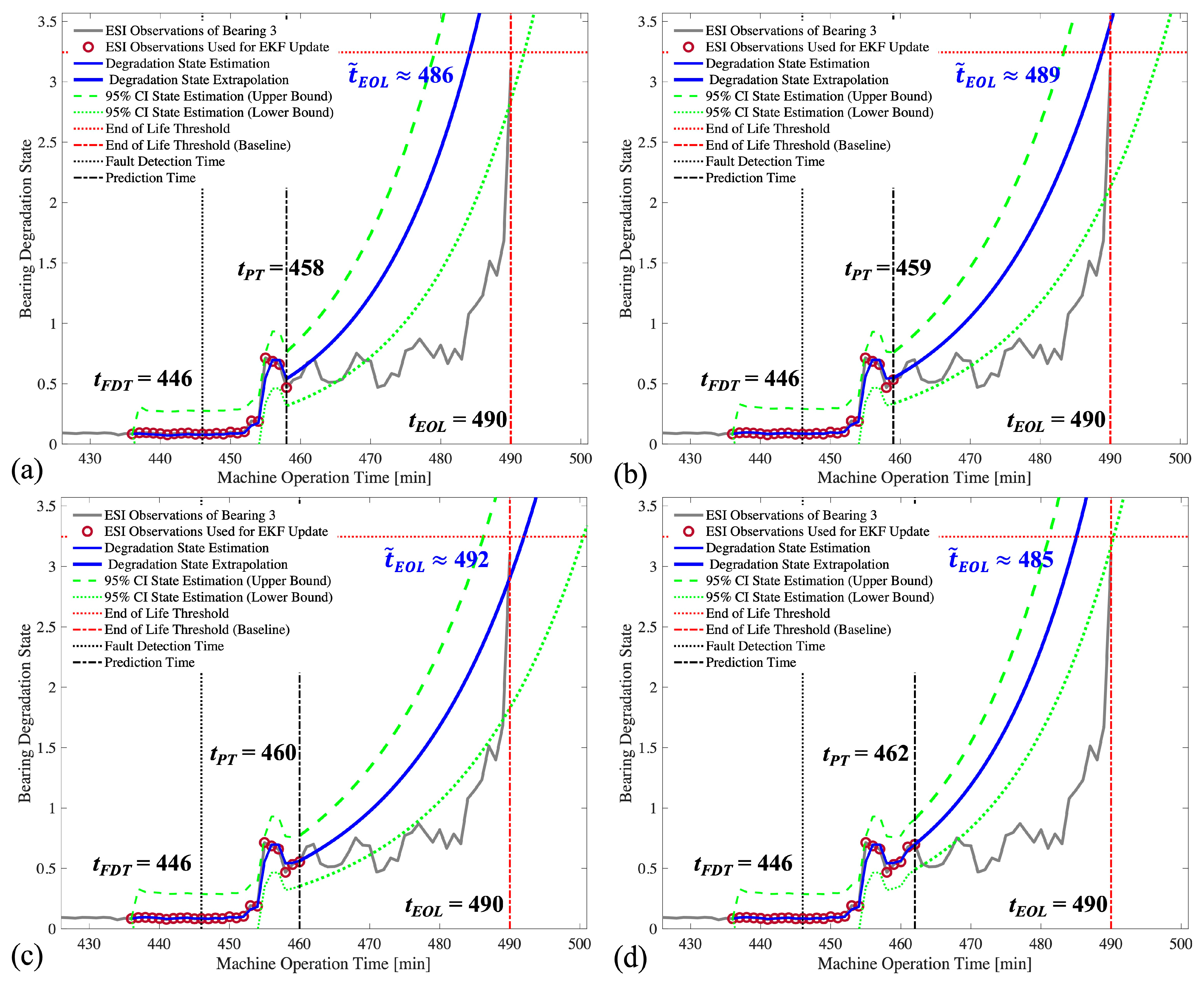
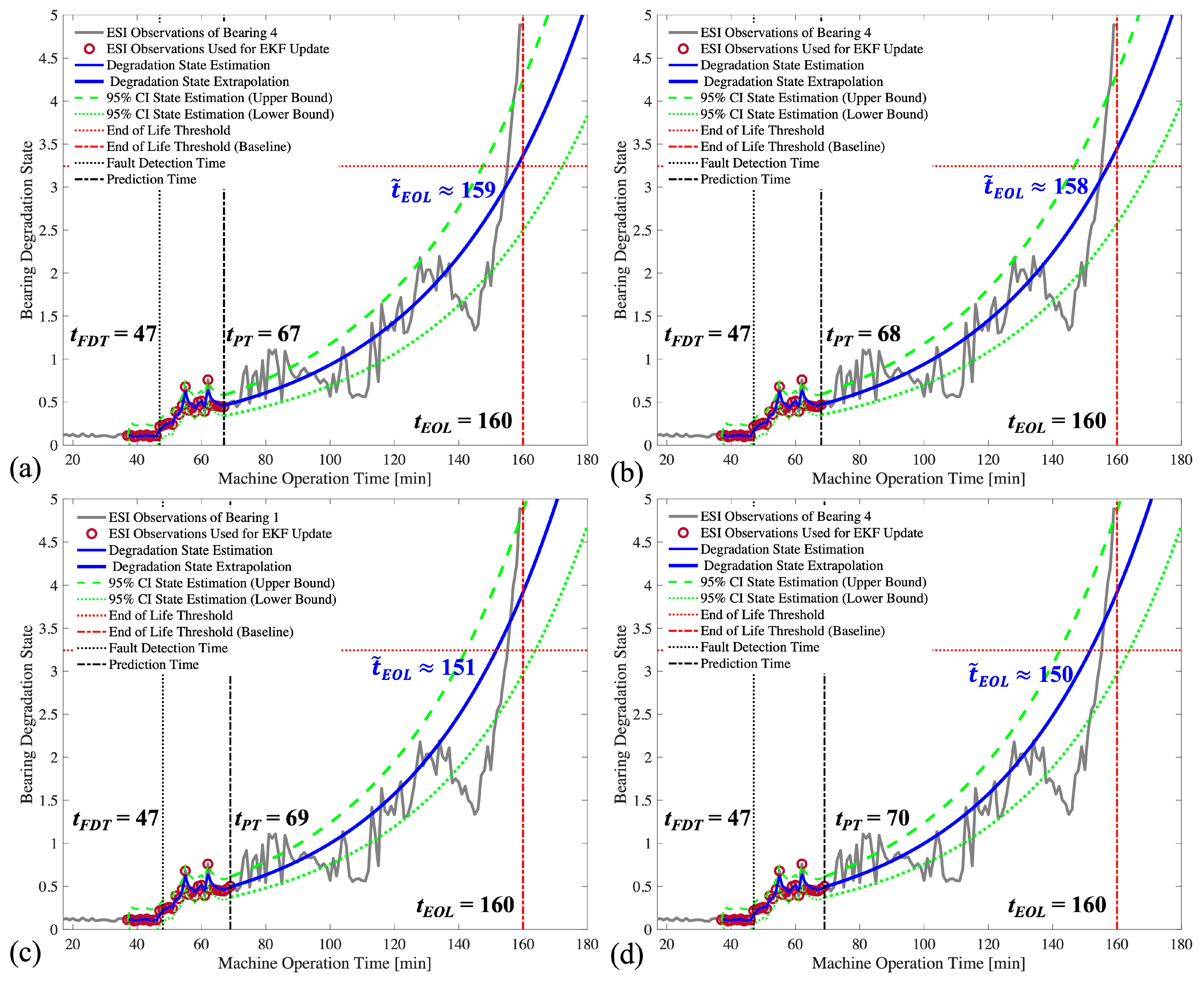
4.4. RUL Prediction of the Test Bearings under Condition C2
4.5. Further Validation on the Test Bearings under Condition C3
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dupuis, R. Application of Oil Debris Monitoring for Wind Turbine Gearbox Prognostics and Health Management. Annu. Conf. PHM Soc. 2010, 2, 1–15. [Google Scholar]
- Liang, L.; Ding, X.; Wen, H.; Liu, F. Impulsive Components Separation Using Minimum-Determinant KL-Divergence NMF of Bi-Variable Map for Bearing Diagnosis. Mech. Syst. Signal Process. 2022, 175, 109129. [Google Scholar] [CrossRef]
- Si, X.S.; Wang, W.; Hu, C.H.; Zhou, D.H. Remaining Useful Life Estimation—A Review on the Statistical Data Driven Approaches. Eur. J. Oper. Res. 2011, 213, 1–14. [Google Scholar] [CrossRef]
- Lienig, J.; Bruemmer, H. Reliability Analysis. In Fundamentals of Electronic Systems Design; Springer International Publishing: Cham, Switzerland, 2017; pp. 45–73. [Google Scholar]
- Qiu, H.; Lee, J.; Lin, J.; Yu, G. Wavelet Filter-Based Weak Signature Detection Method and Its Application on Rolling Element Bearing Prognostics. J. Sound Vib. 2006, 289, 1066–1090. [Google Scholar] [CrossRef]
- Nectoux, P.; Gouriveau, R.; Medjaher, K.; Ramasso, E.; Morello, B.; Zerhouni, N.; Varnier, C. PRONOSTIA: An Experimental Platform for Bearings Accelerated Degradation Tests. In Proceedings of the IEEE International Conference on Prognostics and Health Management, PHM’12, Denver, CO, USA, 18–21 June 2012. [Google Scholar]
- Wang, B.; Lei, Y.; Li, N.; Li, N. A Hybrid Prognostics Approach for Estimating Remaining Useful Life of Rolling Element Bearings. IEEE Trans. Reliab. 2020, 69, 401–412. [Google Scholar] [CrossRef]
- Poplawski, J.V.; Peters, S.M.; Zaretsky, E.V. Effect of Roller Profile on Cylindrical Roller Bearing Life Prediction—Part I: Comparison of Bearing Life Theories. Tribol. Trans. 2008, 44, 339–350. [Google Scholar] [CrossRef]
- International Organization for Standardization ISO 281:2007 Rolling Bearings: Dynamic Load Ratings and Rating Life. Available online: https://www.iso.org/standard/38102.html (accessed on 11 July 2023).
- Zaretsky, E.V. Rolling Bearing Life Prediction, Theory, and Application; NASA Tech. Reports 2013, No. NASA/TP-2013-215305; NASA: Washington, DC, USA, 2013. [Google Scholar]
- Loutas, T.H.; Roulias, D.; Georgoulas, G. Remaining Useful Life Estimation in Rolling Bearings Utilizing Data-Driven Probabilistic E-Support Vectors Regression. IEEE Trans. Reliab. 2013, 62, 821–832. [Google Scholar] [CrossRef]
- Alfarizi, M.G.; Tajiani, B.; Vatn, J.; Yin, S. Optimized Random Forest Model for Remaining Useful Life Prediction of Experimental Bearings. IEEE Trans. Ind. Inform. 2023, 19, 7771–7779. [Google Scholar] [CrossRef]
- Mao, W.; He, J.; Zuo, M.J. Predicting Remaining Useful Life of Rolling Bearings Based on Deep Feature Representation and Transfer Learning. IEEE Trans. Instrum. Meas. 2020, 69, 1594–1608. [Google Scholar] [CrossRef]
- Wang, H.; Ma, X.; Zhao, Y. An Improved Wiener Process Model with Adaptive Drift and Diffusion for Online Remaining Useful Life Prediction. Mech. Syst. Signal Process. 2019, 127, 370–387. [Google Scholar] [CrossRef]
- Li, Y.; Huang, X.; Ding, P.; Zhao, C. Wiener-Based Remaining Useful Life Prediction of Rolling Bearings Using Improved Kalman Filtering and Adaptive Modification. Meas. J. Int. Meas. Confed. 2021, 182, 109706. [Google Scholar] [CrossRef]
- Singleton, R.K.; Strangas, E.G.; Aviyente, S. Extended Kalman Filtering for Remaining-Useful-Life Estimation of Bearings. IEEE Trans. Ind. Electron. 2015, 62, 1781–1790. [Google Scholar] [CrossRef]
- Mosallam, A.; Medjaher, K.; Zerhouni, N. Data-Driven Prognostic Method Based on Bayesian Approaches for Direct Remaining Useful Life Prediction. J. Intell. Manuf. 2016, 27, 1037–1048. [Google Scholar] [CrossRef]
- Särkkä, S. Bayesian Filtering and Smoothing; Cambridge University Press: Cambridge, UK, 2013; ISBN 9781107030657. [Google Scholar]
- Andrade-Cetto, J. The Kalman Filter. Tech. Rep. Inst. Robot. i Inform. Ind. 2002. CSIC-UPC (IRI-DT-02-01). Available online: https://www.iri.upc.edu/publications/show/545 (accessed on 1 May 2023).
- Haykin, S. Kalman Filtering and Neural Networks; Wiley: Hoboken, NJ, USA, 2001; Volume 5, ISBN 9780471369981. [Google Scholar]
- Wan, E.A.; Van Der Merwe, R. The Unscented Kalman Filter for Nonlinear Estimation. In Proceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium (Cat. No.00EX373), Lake Louise, AB, Canada, 4 October 2000; pp. 153–158. [Google Scholar] [CrossRef]
- Coelho, M.d.F.; Bousson, K.; Ahmed, K. An Improved Extended Kalman Filter for Radar Tracking of Satellite Trajectories. Designs 2021, 5, 54. [Google Scholar] [CrossRef]
- Singh, M.; Lakra, S.; Das, S.; Mishra, S.K.; Sahoo, A.K.; Acharya, B. Extended Kalman Filter-Based Position Estimation in Autonomous Vehicle Applications. Lect. Notes Electr. Eng. 2023, 887, 427–440. [Google Scholar] [CrossRef]
- Liang, L.; Wen, H.; Liu, F.; Li, G.; Li, M. Feature Extraction of Impulse Faults for Vibration Signals Based on Sparse Non-Negative Tensor Factorization. Appl. Sci. 2019, 9, 3642. [Google Scholar] [CrossRef]
- Wen, H.; Zhang, L.; Sinha, J.K. Adaptive Band Extraction Based on Low Rank Approximated Nonnegative Tucker Decomposition for Anti-Friction Bearing Faults Diagnosis Using Measured Vibration Data. Machines 2022, 8, 694. [Google Scholar] [CrossRef]
- Randall, R.B.; Antoni, J. Rolling Element Bearing Diagnostics—A Tutorial. Mech. Syst. Signal Process. 2011, 25, 485–520. [Google Scholar] [CrossRef]
- Sinha, J.K. Vibration Analysis, Instruments, and Signal Processing; CRC Press: Boca Raton, FL, USA, 2014; ISBN 9781482231458. [Google Scholar]
- Dai, Y.; Yu, S.; Yan, Y.; Yu, X. An EKF-Based Fast Tube MPC Scheme for Moving Target Tracking of a Redundant Underwater Vehicle-Manipulator System. IEEE/ASME Trans. Mechatron. 2019, 24, 2803–2814. [Google Scholar] [CrossRef]
- Feng, D.; Wang, C.; He, C.; Zhuang, Y.; Xia, X.-G. Kalman-Filter-Based Integration of IMU and UWB for High-Accuracy Indoor Positioning and Navigation. IEEE Internet Things J. 2020, 7, 3133–3146. [Google Scholar] [CrossRef]
- Lei, Y.; Xia, D.; Erazo, K.; Nagarajaiah, S. A Novel Unscented Kalman Filter for Recursive State-Input-System Identification of Nonlinear Systems. Mech. Syst. Signal Process. 2019, 127, 120–135. [Google Scholar] [CrossRef]
- Batzel, T.D.; Swanson, D.C. Prognostic Health Management of Aircraft Power Generators. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 473–483. [Google Scholar] [CrossRef]
- Sepasi, S.; Ghorbani, R.; Liaw, B.Y. Improved Extended Kalman Filter for State of Charge Estimation of Battery Pack. J. Power Sources 2014, 255, 368–376. [Google Scholar] [CrossRef]
- Simon, D. Optimal State Estimation: Kalman, H∞, and Nonlinear Approaches; Wiley: Hoboken, NJ, USA, 2006; ISBN 9780471708582. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sampling Settings | Operating Condition (Speed/Load) | Bearing ID | Life Duration/min | Defect Components * |
|---|---|---|---|---|
| Rate: 25.6 kHz Length: 1.28 s/min | C1: 35Hz/12kN | 1 2 | 161 158 | Outer-Race Outer-Race |
| C2: 37.5Hz/11kN | 3 4 | 491 161 | Inner-Race Outer-Race | |
| C3: 40Hz/10kN | 5 6 | 371 1515 | Inner-Race Inner-Race |
| Number of Balls | Inner Diameter | Outer Diameter | Contact Angle | |
|---|---|---|---|---|
| Dimension | 8 | 29.30 mm | 39.80 mm | 0° |
| FCF | FTF (Hz) | BSF (Hz) | BPFO (Hz) | BPFI (Hz) |
| Condition 1 | 13.49 | 72.33 | 107.91 | 172.09 |
| Condition 2 | 14.45 | 77.50 | 115.62 | 184.38 |
| Condition 3 | 15.42 | 82.66 | 123.32 | 196.68 |
| Input: The ESI observations, , EOL threshold, , RUL prediction time , state process noise variance, , and the measurement noise variance, Initialization: State vector , covariance of state process error, |
| For steps , if , implement the following: 1) Predict a prior estimate of state by (32), measurement by (33), and the covariance of state process error by (34). 2) The extended Kalman filter gain Kt is computed by (35). 3) Obtain ESI observation at time step t, , to calculate measurement prediction error , and update the posterior estimations of state by (36) and covariance matrix by (37). 4) , repeat from 1). Extrapolate the RUL at the prediction time based on the state transition model via (38). Compute the 95% credible interval of the estimated RUL based on analogous extrapolation by (39) and (40). Output: RUL estimates at the prediction time with its credible interval. |
| Operating Condition (Speed/Load) | Bearing ID | First Detection Time of Fault | End-of-Life Time | Fault Type |
|---|---|---|---|---|
| C1: 35Hz/12kN | 1 2 | 35 min 59 min | 126 min 151 min | Outer-Race Fault Outer-Race Fault |
| C2: 37.5Hz/11kN | 3 4 | 446 min 47 min | 490 min 160 min | Inner-Race Fault Outer-Race Fault |
| C3: 40Hz/10kN | 5 6 | 327 min 1418 min | 353 min 1478 min | Inner-Race Fault Inner-Race Fault |
| Bearing ID | Baseline /minute | Baseline /minute | /minute | Estimated End-of-Life Time /minute | Baseline RUL /minute | Estimated RUL (Residual) /minute | RUL 95% CI /minute |
|---|---|---|---|---|---|---|---|
| 1 | 35 | 126 | 40 | 127 | 86 | 87 (+1) | [84,89] |
| 45 | 126 | 81 | 81 (0) | [79,83] | |||
| 50 | 134 | 76 | 84 (+8) | [83,87] | |||
| 55 | 111 | 71 | 56 (−15) | [56,63] | |||
| 2 | 59 | 151 | 66 | 146 | 85 | 80 (−5) | [70,88] |
| 69 | 151 | 82 | 82 (0) | [74,91] | |||
| 71 | 149 | 80 | 78 (−2) | [70,85] | |||
| 74 | 150 | 77 | 76 (−1) | [69,83] |
| Bearing ID | Baseline FDT* /minute | Baseline /minute | /minute | Estimated End-of-Life Time /minute | Baseline RUL /minute | Estimated RUL (Residual) /minute | RUL 95% CI /minute |
|---|---|---|---|---|---|---|---|
| 3 | 446 | 490 | 458 | 486 | 32 | 28 (−4) | [21,34] |
| 459 | 489 | 31 | 30 (−1) | [24,38] | |||
| 460 | 492 | 30 | 32 (+2) | [26,41] | |||
| 462 | 485 | 28 | 23 (−5) | [19,28] | |||
| 4 | 47 | 160 | 67 | 159 | 93 | 92 (−1) | [80,105] |
| 68 | 158 | 92 | 90 (−2) | [78,102] | |||
| 69 | 151 | 91 | 82 (−9) | [73,95] | |||
| 70 | 150 | 90 | 80 (−10) | [71,91] |
| Bearing ID | Baseline /minute | Baseline /minute | /minute | Estimated End-of-Life Time | Baseline RUL /minute | Estimated RUL (Residual) /minute | RUL 95% CI /minute |
|---|---|---|---|---|---|---|---|
| 5 | 327 | 353 | 343 | 355 | 10 | 12 (+2) | [10,14] |
| 345 | 350 | 8 | 5 (−3) | [4,6] | |||
| 346 | 349 | 7 | 3 (−4) | [2,4] | |||
| 347 | 352 | 6 | 5 (−1) | [4,6] | |||
| 6 | 1418 | 1478 | 1428 | 1472 | 50 | 44 (−6) | [38,50] |
| 1429 | 1476 | 49 | 47 (−2) | [41,53] | |||
| 1430 | 1477 | 48 | 47 (−1) | [41,54] | |||
| 1441 | 1478 | 37 | 37 (0) | [33,41] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wen, H.; Zhang, L.; Sinha, J.K. Early Prediction of Remaining Useful Life for Rolling Bearings Based on Envelope Spectral Indicator and Bayesian Filter. Appl. Sci. 2024, 14, 436. https://doi.org/10.3390/app14010436
Wen H, Zhang L, Sinha JK. Early Prediction of Remaining Useful Life for Rolling Bearings Based on Envelope Spectral Indicator and Bayesian Filter. Applied Sciences. 2024; 14(1):436. https://doi.org/10.3390/app14010436
Chicago/Turabian StyleWen, Haobin, Long Zhang, and Jyoti K. Sinha. 2024. "Early Prediction of Remaining Useful Life for Rolling Bearings Based on Envelope Spectral Indicator and Bayesian Filter" Applied Sciences 14, no. 1: 436. https://doi.org/10.3390/app14010436