

Estimation Strategy of RUL Calculation in the Case of Crack in the Magnets of PMM Used in HEV Application

Abstract
:1. Introduction
2. The Electrical Machine Used
3. Modeling of Crack Growth
- The crack is not of constant amplitude; it is propagating a function of time;
- The crack is one-dimensional;
- The material where the crack exists has a certain elastic condition;
- The load range is relatively constant;
- Sensor data and offline signals have similar time stamps;
- The offline data set contains enough data that represent different degradation behaviors.
4. Estimation Strategy of RUL Calculation Using Database Model
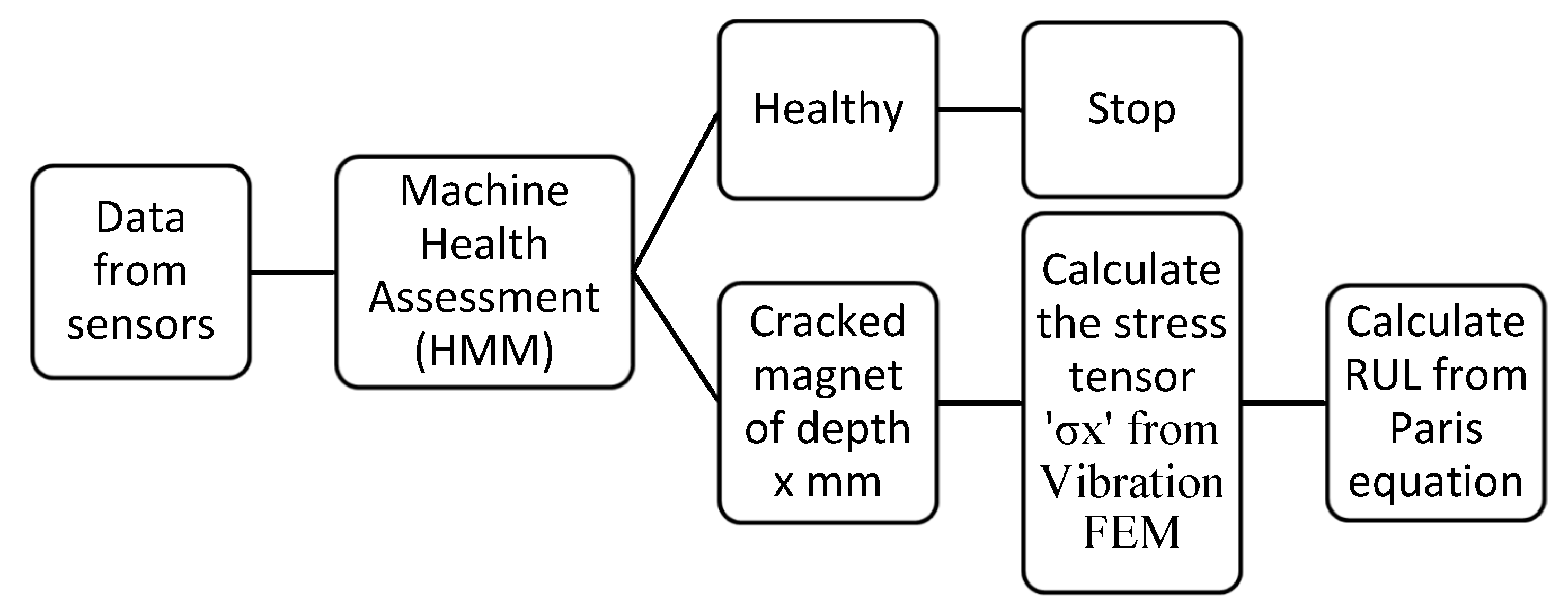
4.1. Description of the RUL Strategy
- First, an offline database is prepared where data related to each phase of fault is encountered.
- Second, a health assessment of the machine is conducted. In our case, the HMM model performed this assessment [37].
- Third, the RUL calculation or prediction is executed.
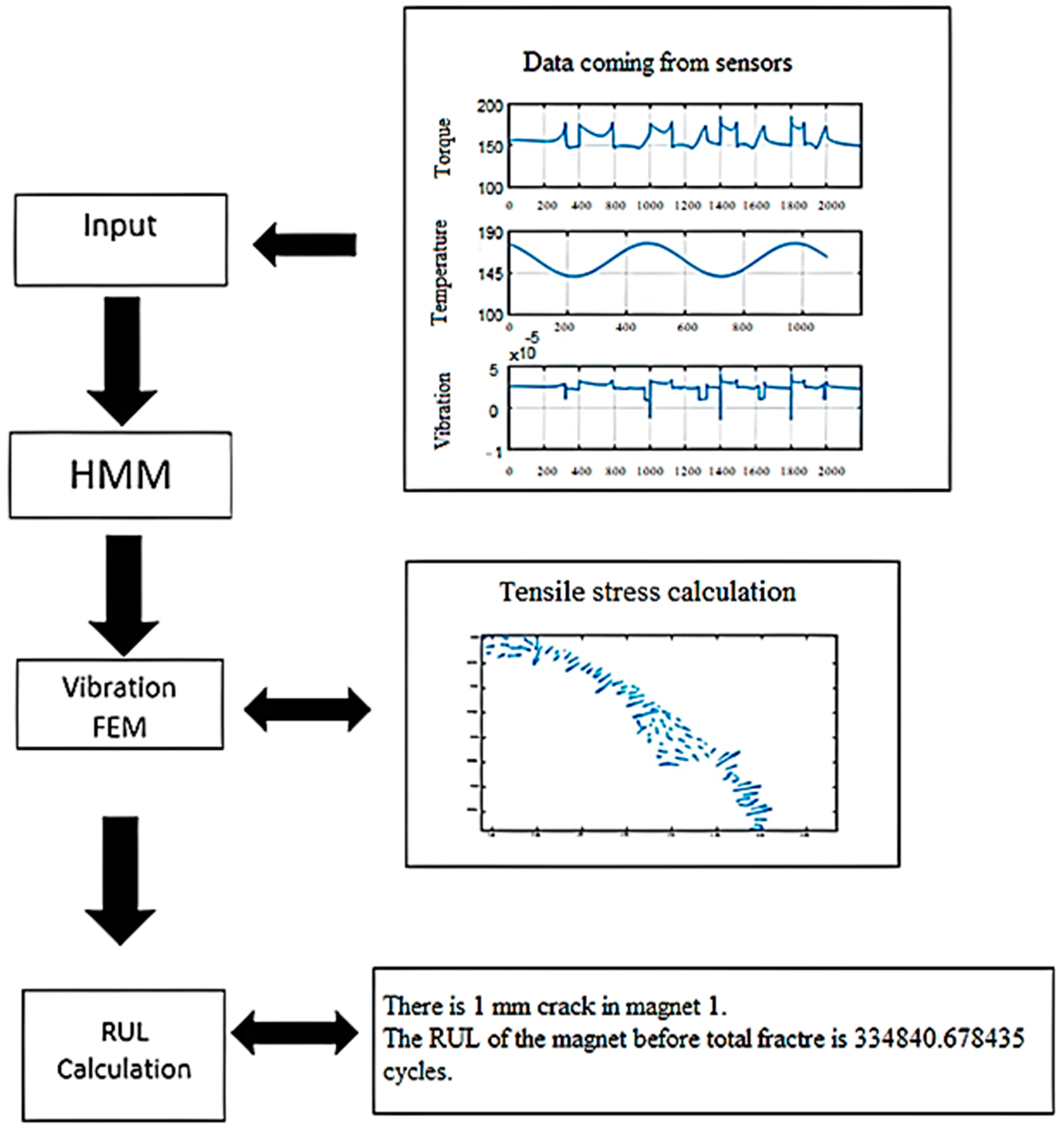
4.2. Adaptation and Application of the Described RUL above on Our System
5. The Application of the Strategy on the Selected System
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sankavaram, C.; Kodali, A.; Pattipati, K. An Integrated Health Management Process for Automotive Cyber-Physical Systems. In Proceedings of the IEEE International Conference on Computing, Networking and Communications, Workshops Cyber Physical System, San Diego, CA, USA, 28–31 January 2013. [Google Scholar]
- Yang, A.; Widodo, S. Introduction of Intelligent Machine Fault Diagnosis and Prognosis; Nova Science Publishers: Hauppauge, NY, USA, 2010. [Google Scholar]
- Djeziri, M.A.; Benmoussa, S.; Sanshez, R. Hybrid method for remaining useful life prediction in wind turbine systems. Renew. Energy 2018, 116, 173–187. [Google Scholar] [CrossRef]
- Ginzarly, R.; Hoblos, G.; Moubayed, N. Decision on Prognosis approaches of Hybrid Electric Vehicles’ electrical machines. In Proceedings of the 2015 Third International Conference on Technological Advances in Electrical, Electronics and Computer Engineering (TAEECE), Beirut, Lebanon, 29 April–1 May 2015. [Google Scholar]
- Ginzarly, R.; Hoblos, G.; Moubayed, N. Hidden Markov Model Based Failure Prognosis for Permanent Magnet Synchronous Machine. In ACD European Workshop on Advanced Control and Diagnosis; Springer: Florence, Italy, 2019. [Google Scholar]
- Eker, O.F.; Camci, F.; Jennions, I.K. Major Challenges in Prognostics: Study on Benchmarking Prognostics Datasets. In Proceedings of the 1st European Conference of the Prognostics and Health Management Society, Dresden, Germany, 3–5 July 2012; PHM Society. pp. 148–155. [Google Scholar]
- Guo, J.; Li, Z.; Li, M. A Review on Prognostics Methods for Engineering Systems. IEEE Trans. Reliab. 2019, 69, 1110–1129. [Google Scholar] [CrossRef]
- Djeziri, M.A.; Benmoussa, S.; Benbouzid, M. Data-driven approach augmented in simulation for robust fault prognosis. Eng. Appl. Artif. Intell. 2019, 86, 154–164. [Google Scholar] [CrossRef]
- Enrique, L.; Arroyo, C. Modeling and Simulation of Permanent Magnet Synchronous Motor Drive System. Master’s Thesis, University of Puerto Rico, Mayagüez Campus, Mayagüez, Puerto Rico, 2006. [Google Scholar]
- Rabiner, L. A tutorial on hidden markov model and selected applications in speech recognition. Proc. IEEE 1989, 77, 257–286. [Google Scholar] [CrossRef] [Green Version]
- Haider, S.; Zanardelli, W.; Aviyente, S. Prognosis of Electrical Faults in Permanent Magnet AC Machines using the Hidden Markov Model. In Proceedings of the IECON 2010-36th Annual Conference on IEEE Industrial Electronics Society, Glendale, AZ, USA, 7–10 November 2010. [Google Scholar]
- Mecrow, B.C.; Jack, A.; Haylock, J.; Coles, J. Fault-tolerant permanent magnet machine drives. IEE Proc.-Electr. Power Appl. 1996, 143, 437–442. [Google Scholar] [CrossRef]
- Winkler, D.; Gühmann, C. Modelling of Electrical Faults in Induction Machines Using Modelica. In Proceedings of the 48th Scandinavian Conference on Simulation and Modeling, Särö, Dennemark, 30–31 October 2007; pp. 82–87. [Google Scholar]
- Fettweis, G.; Meyr, H. Feedforward Architectures for Parallel Viterbi Decoding. J. VLSI Signal Process. 1991, 3, 105–119. [Google Scholar] [CrossRef] [Green Version]
- Heng, A.; Zhang, S.; Tan, A. Rotating machinery prognostics: State of the art, challenges and opportunities. Mech. Syst. Signal Process. 2009, 23, 724–739. [Google Scholar] [CrossRef]
- ShengSi, X.; Hu, W.W.C.; Zhouc, D. Remaining useful life estimation–A review on the statistical data driven approaches. Eur. J. Oper. Res. 2011, 213, 1–14. [Google Scholar]
- Wang, X.; Li, J.; Kao, B.-C.; Ho, Y.-W. A Novel Prediction Process of the Remaining Useful Life of Electric Vehicle Battery Using Real-World Data. Processes 2021, 9, 2174. [Google Scholar] [CrossRef]
- Wu, L.; Fu, X.; Guan, Y. Review of the Remaining Useful Life Prognostics of Vehicle Lithium-Ion Batteries Using Data-Driven Methodologies. Appl. Sci. 2016, 6, 166. [Google Scholar] [CrossRef] [Green Version]
- Pan, C.; Huang, A.; He, Z.; Lin, C.; Sun, Y.; Zhao, S.; Wang, L. Prediction of remaining useful life for lithium-ion battery based on particle filter with residual resampling. Energy Sci. Eng. 2021, 9, 1115–1133. [Google Scholar] [CrossRef]
- Li, X.; Shu, X.; Shen, J.; Xiao, R.; Yan, W.; Chen, Z. An O-Board remaining useful life estimation algorithm for Lithium Ion batteries of electric vehicles. Energies 2017, 10, 691. [Google Scholar] [CrossRef] [Green Version]
- Yang, F.; Habibullah, M.S.; Zhang, T.; Xu, Z.; Lim, P.; Nadarajan, S. Health Index-Based Prognostics for Remaining Useful Life Predictions in Electrical Machines. IEEE Trans. Ind. Electron. 2016, 63, 2633–2644. [Google Scholar] [CrossRef]
- Omariba, Z.; Zhang, L.; Sun, D. Remaining Useful Life Prediction of Electric Vehicle Lithium-Ion Battery Based on Particle Filter Method. In Proceedings of the IEEE 3rd International conference on Big Data Analysis, Shanghai, China, 9–12 March 2018. [Google Scholar]
- Chau, K.; Li, W. Overview of electric machines for electric and hybrid vehicles. Int. J. Veh. Des. 2014, 64, 46. [Google Scholar] [CrossRef] [Green Version]
- Finken, T.; Felden, M.; Hameyer, K. Comparison and design of different electrical machine types regarding their applicability in hybrid electrical vehicles. In Proceedings of the 2008 18th International Conference on Electrical Machines, Vilamoura, Portugal, 6–9 September 2008. [Google Scholar]
- Simpson, A. Cost-Benefit Analysis of Plug-In Hybrid Electric Vehicle Technology. In Proceedings of the 22nd International Battery, Hybrid and Fuel Cell Electric Vehicle Symposium and Exhibition (EVS-22), Yokohama, Japan, 23–28 October 2006. [Google Scholar]
- Zheng, J.; Zhao, W.; Ji, J.H.; Liu, G. Design and comparison of interior permanent-magnet machines for hybrid electric vehicles. In Proceedings of the IEEE International Conference on Applied Superconductivity and Electromagnetic Devices (ASEMD), Shanghai, China, 20–23 November 2015. [Google Scholar]
- Chan, C.C.; Chau, K.T.; Jiang, J.Z. Novel Permanent Magnet Motor Drives for Electric Vehicles. IEEE Trans. Ind. Electron. 1996, 43, 331–339. [Google Scholar] [CrossRef] [Green Version]
- Schneider, T.; Binder, A. Evaluation of new Surface Mounted Permanent Magnet Synchronous Machine with Finite Element Calculations. In Computer Engineering in Applied Electromagnetism; Springer: Dordrecht, The Netherlands, 2005. [Google Scholar]
- Hu, T.; Lin, F.; Cui, L. The Flux-Weakening Control of Interior Permanent Magnet Synchronous Traction Motors for High-Speed Train. In Proceedings of the 1st International Workshop on High-Speed and Intercity Railways; Lecture Notes in Electrical Engineering; Springer: Berlin/Heidelberg, Germany, 2012; volume 147. [Google Scholar]
- Wang, A.; Ma, D.; Wang, H. FEA-Based Calculation of Performances of IPM Machines with Five Topologies for Hybrid-Electric Vehicle Traction. Int. J. Electr. Comput. Electron. Commun. Eng. 2013, 7, 929–977. [Google Scholar]
- Lee, S.; Habetler, T.G. An online stator winding resistance estimation techniquefor temperature monitoring of line-connected inductionmachines. IEEE Ind. Appl. Conf. 2001, 39, 685–994. [Google Scholar]
- Hsu, J.S. Possible errors in measurement of air-gap torque pulsations of induction motors. IEEE Trans. Energy Convers. 1992, 7, 202–208. [Google Scholar] [CrossRef] [Green Version]
- Hsu, J.S. Monitoring of Defects in Induction Motors Through Air-Gap Torque Observation. IEEE Trans. Ind. Appl. 1995, 31, 1016–1021. [Google Scholar] [CrossRef] [Green Version]
- Ginzarly, R.; Alameh, K.; Hoblos, G.; Moubayed, N. Moubayed, Numerical versus analytical techniques for healthy and faulty surface permanent magnet machine. In Proceedings of the 2016 Third International Conference on Electrical, Electronics, Computer Engineering and their Applications (EECEA), Beirut, Lebanon, 21–23 April 2016. [Google Scholar]
- Ginzarly, R.; Hoblos, G.; Moubayed, N. Electromagnetic and vibration finite element model for early fault detection in permanent magnet machine. In Proceedings of the 10th IFAC Symposium on Fault Detection, Supervision and Safety of Technical Processes, Warsaw, Poland, 29–31 August 2018. [Google Scholar]
- Ginzarly, R.; Hoblos, G.; Moubayed, N. Localizing Turn to Turn Short Circuit in HEV’s Machine Using Thermal Finite Element Model. In Proceedings of the IEEE International Multidisciplinary Conference on Engineering Technology (IMCET), Beirut, Lebanon, 4–16 November 2018. [Google Scholar]
- Ginzarly, R.; Hoblos, G.; Moubayed, N. From Modeling to Failure Prognosis of Permanent Magnet Synchronous Machine. Appl. Sci. 2020, 10, 691. [Google Scholar] [CrossRef] [Green Version]
- Wu, Z. Conception Optimale d’un Entrainement Electrique Pour la Chaine de Traction d’un Vehicule Hybride Electrique. 21 Mars 2012. Available online: https://tel.archives-ouvertes.fr/tel-00838732 (accessed on 29 January 2023).
- Donea, J.; Huerta, A. Finite Element Methods for Flow Problems; Wiley: Hoboken, NJ, USA, 2004. [Google Scholar]
- Azaïs, R.; Gégout-Petit, A.; Greciet, F. Rupture detection in fatigue crack propagation. In Statistical Inference for Piecewise-deterministic Markov Processes; Wiley: Hoboken, NJ, USA, 2018; pp. 173–207. [Google Scholar]
- Klysz, S.; Gmurkzyk, G.; Lisiecki, J. Fatigue of Aircraft Structures; Institute of Aviation Scientific Publications: Warsaw, Poland, 2010; pp. 52–58. [Google Scholar]
- Wong, F. Fatigue, Fracture, and Life Prediction Criteria for Composite Materials in Magnets; Plasma Fusion Center Massachusetts Institute of Technology: Cambridge, MA, USA, 1990. [Google Scholar]
- Citarella, R.; Frattura, A.; Strutturale, F. Coupled FEM-DBEM method to assess crack growth in magnet system of Wendelstein. Frattura ed Integrità Strutturale 2013, 26, 92–103. [Google Scholar] [CrossRef] [Green Version]
- Jiang, S.; Zhang, W.; Li, X. An Analytical Model for Fatigue Crack Propagation Prediction with Overload Effect. Math. Probl. Eng. 2014, 2014, 713678. [Google Scholar] [CrossRef] [Green Version]
- Yu, Y.; Hu, C.; Si, X. Degradation Data-Driven Remaining Useful Life Estimation in the Absence of Prior Degradation Knowledge. J. Control. Sci. Eng. 2017, 2017, 4375690. [Google Scholar] [CrossRef] [Green Version]
- Mosallam, A.; Medjaher, K.; Zerhouni, N. Data-driven prognostic method based on Bayesian approaches for direct remaining useful life prediction. J. Intell. Manuf. 2014, 27, 1037–1048. [Google Scholar] [CrossRef] [Green Version]
- Torgo, L.; Zizka, J.; Brazdil, P. Data Fitting with Rule-based Regression. In Proceedings of the 2nd international workshop on Artificial Intelligence Techniques (AIT’95), Brno, Czech Republic, 18–20 September 1995. [Google Scholar]
- Rymarczyk, T.; Kłosowski, G.; Kozłowski, E. Comparison of Selected Machine Learning Algorithms for Industrial Electrical Tomography. Sensors 2019, 19, 1521. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mohammed, A.; Djurovic, S. Stator Winding Internal Thermal Stress Monitoring and Analysis Using in-situ FBG Sensing Technology. IEEE Trans. Energy Convers. 2018, 33, 1508–1518. [Google Scholar] [CrossRef]
- Saha, A. FPGA based self-vibration compensated two-dimensional non-contact vibration measurement using 2D position sensitive detector with remote monitoring. In International Measurement Confederation; Institute of Measurement and Control; Elsevier: Amsterdam, The Netherlands, 2017. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
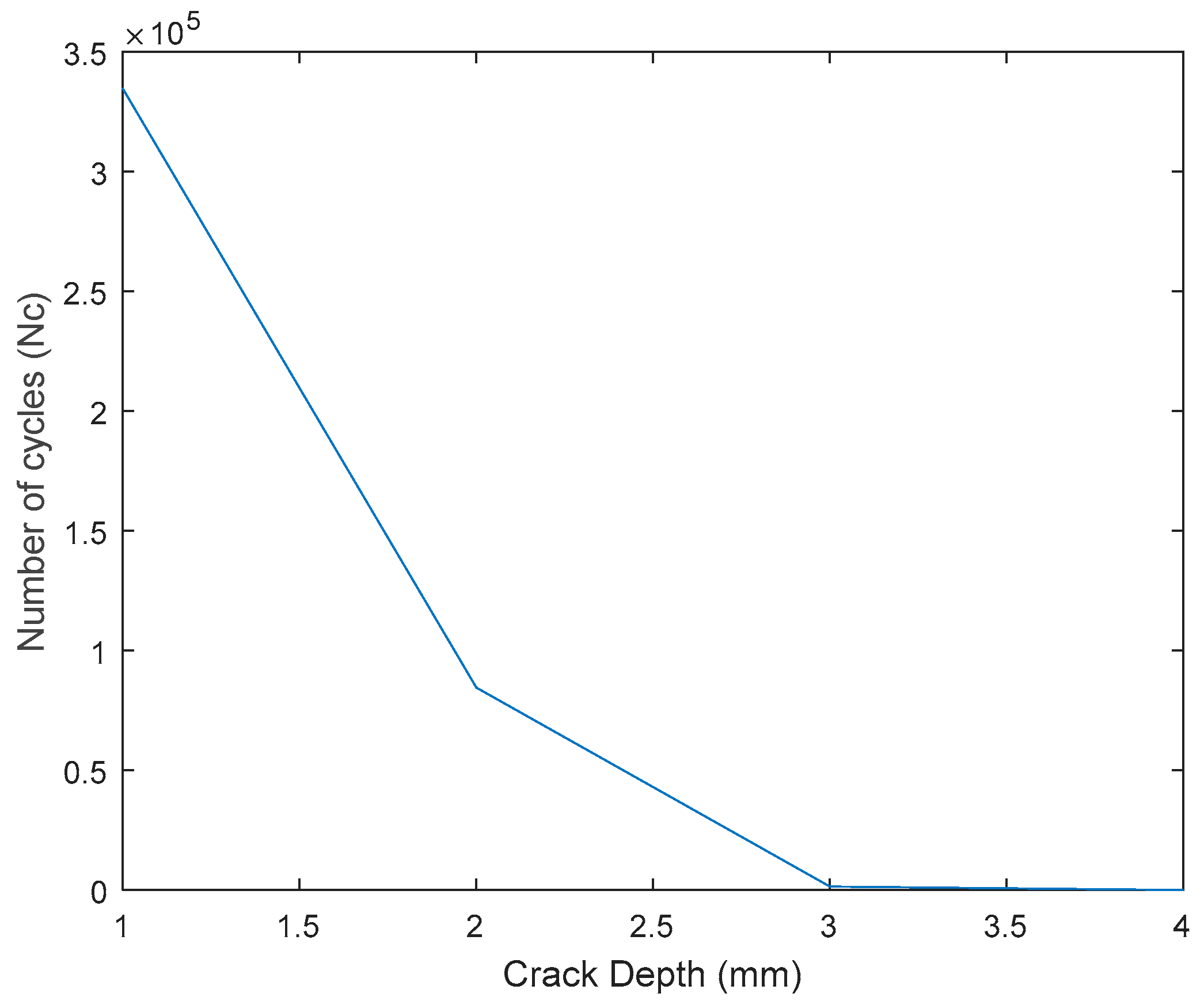
| Crack Depth | RUL (Nc) |
|---|---|
| 1 mm | 334,840.68 |
| 2 mm | 84,555.73 |
| 3 mm | 1423.5 |
| 4 mm | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ginzarly, R.; Hoblos, G.; Moubayed, N. Estimation Strategy of RUL Calculation in the Case of Crack in the Magnets of PMM Used in HEV Application. Appl. Sci. 2023, 13, 3694. https://doi.org/10.3390/app13063694
Ginzarly R, Hoblos G, Moubayed N. Estimation Strategy of RUL Calculation in the Case of Crack in the Magnets of PMM Used in HEV Application. Applied Sciences. 2023; 13(6):3694. https://doi.org/10.3390/app13063694
Chicago/Turabian StyleGinzarly, Riham, Ghaleb Hoblos, and Nazih Moubayed. 2023. "Estimation Strategy of RUL Calculation in the Case of Crack in the Magnets of PMM Used in HEV Application" Applied Sciences 13, no. 6: 3694. https://doi.org/10.3390/app13063694