
The Modular Gait Design of a Soft, Earthworm-like Locomotion Robot Driven by Ultra-Low Frequency Excitation

Abstract
:1. Introduction
2. Deformation and State Description of a Segment
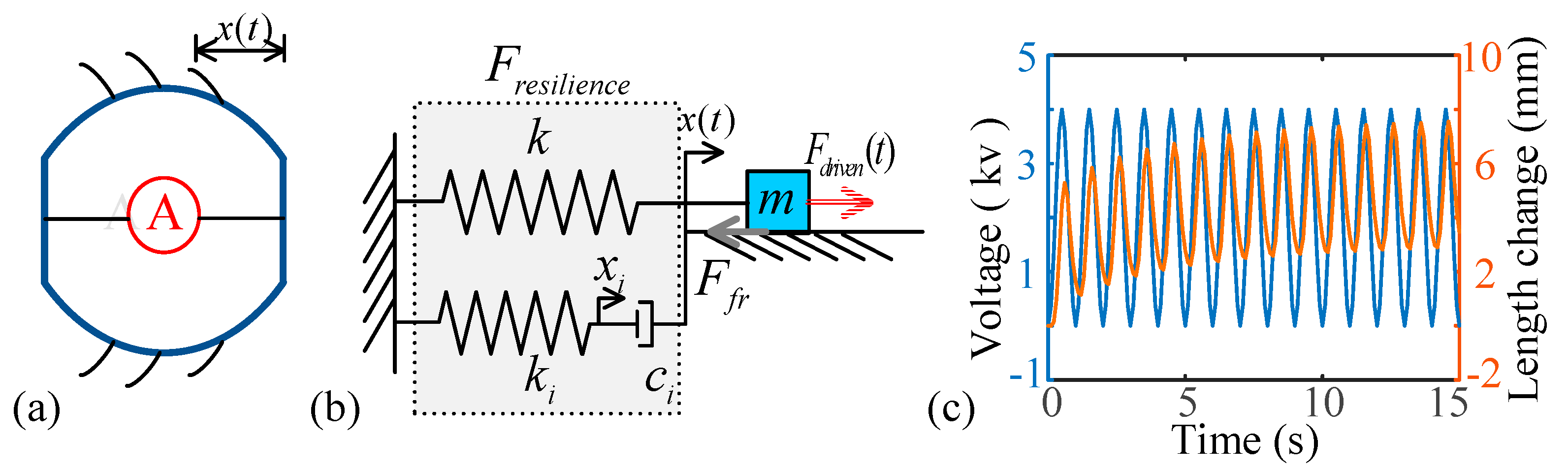
2.1. Segment Deformation
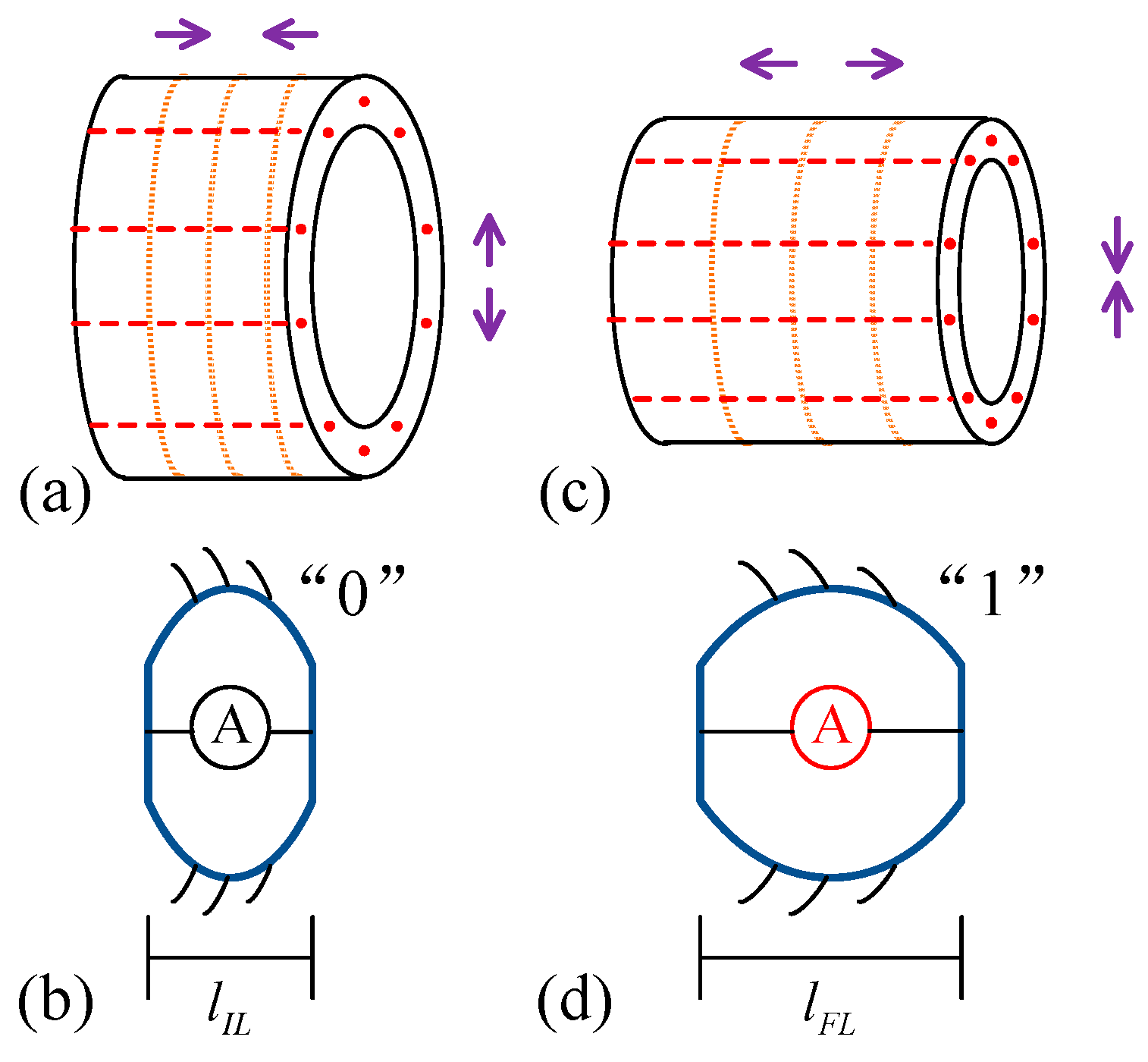
2.2. The State Definition of a Segment
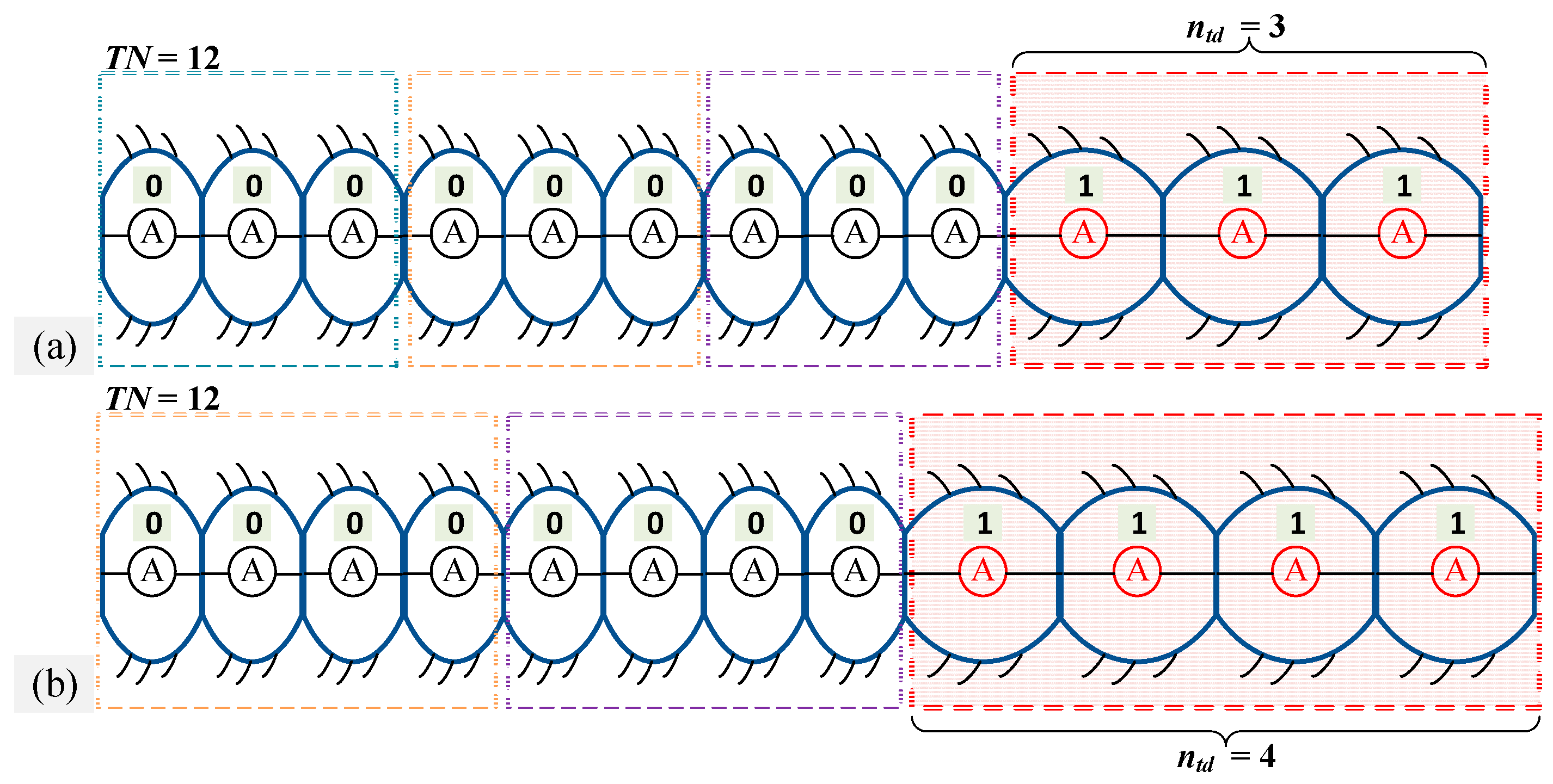
2.3. The Definition of Driven Module
2.3.1. Unbroken Driven Module
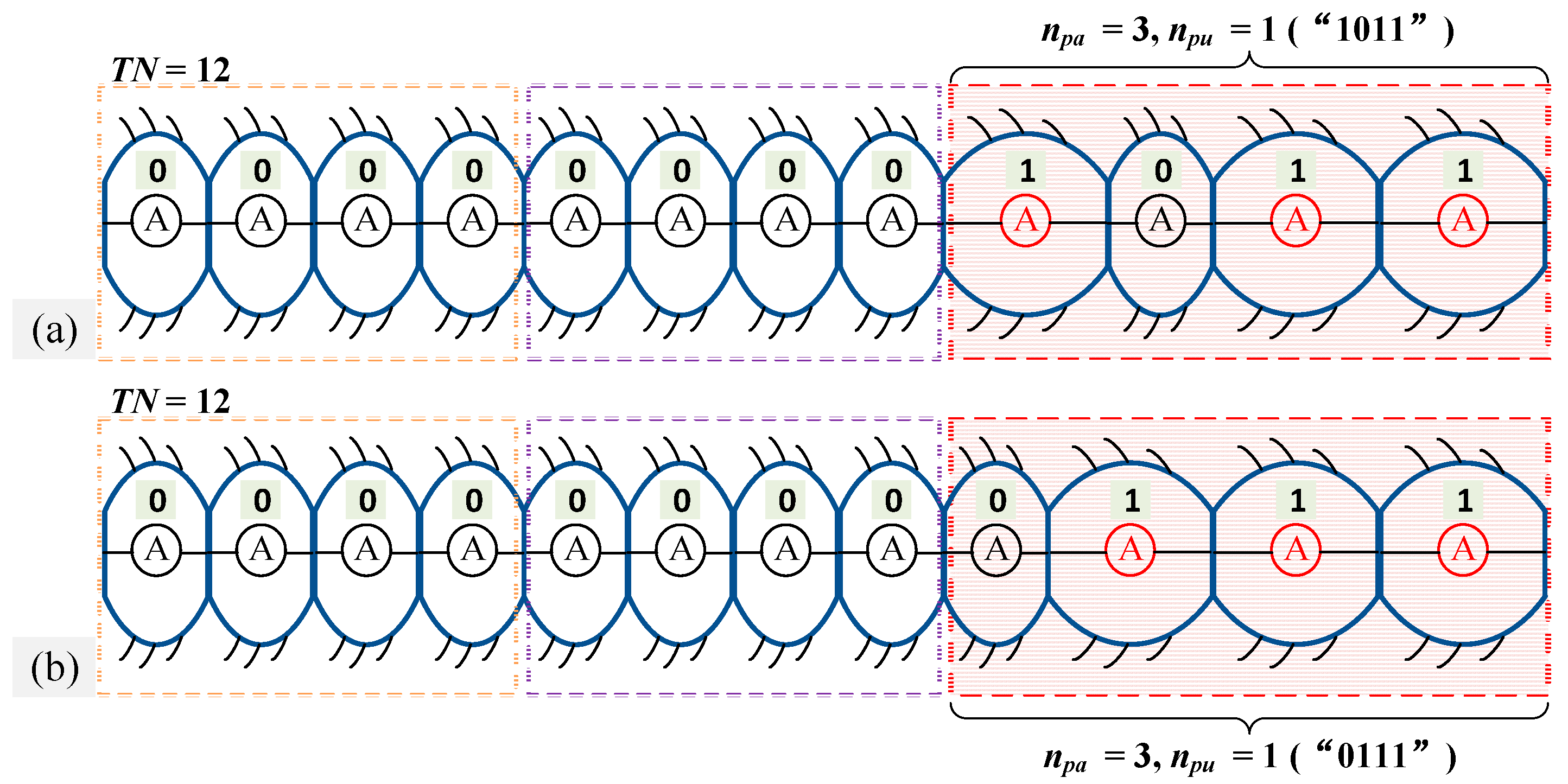
2.3.2. Broken Driven Module
3. Modular Gait Generation Principle
3.1. Driven Module Waves without Overlapping
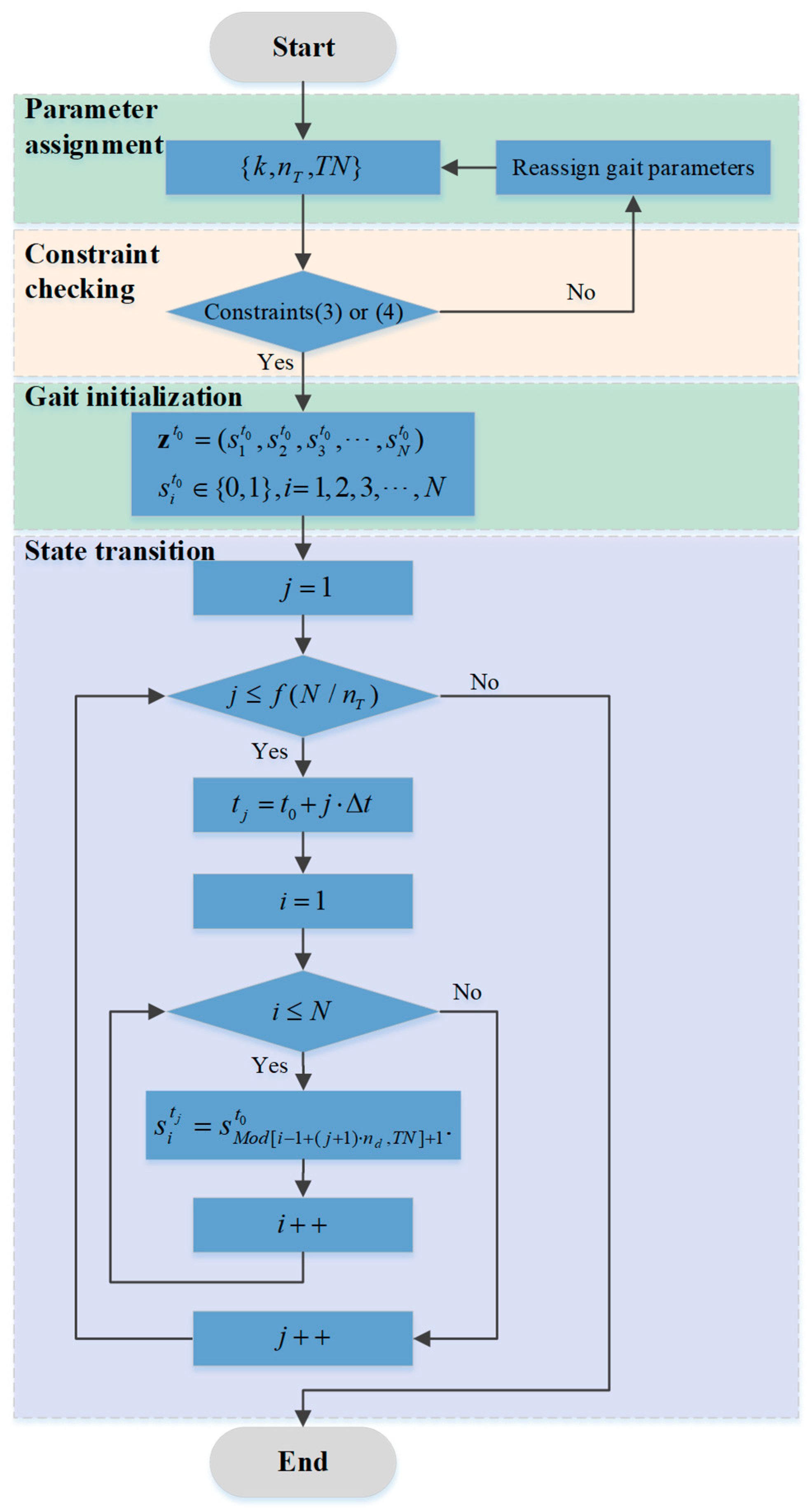
3.1.1. Generation Algorithm for MG-I
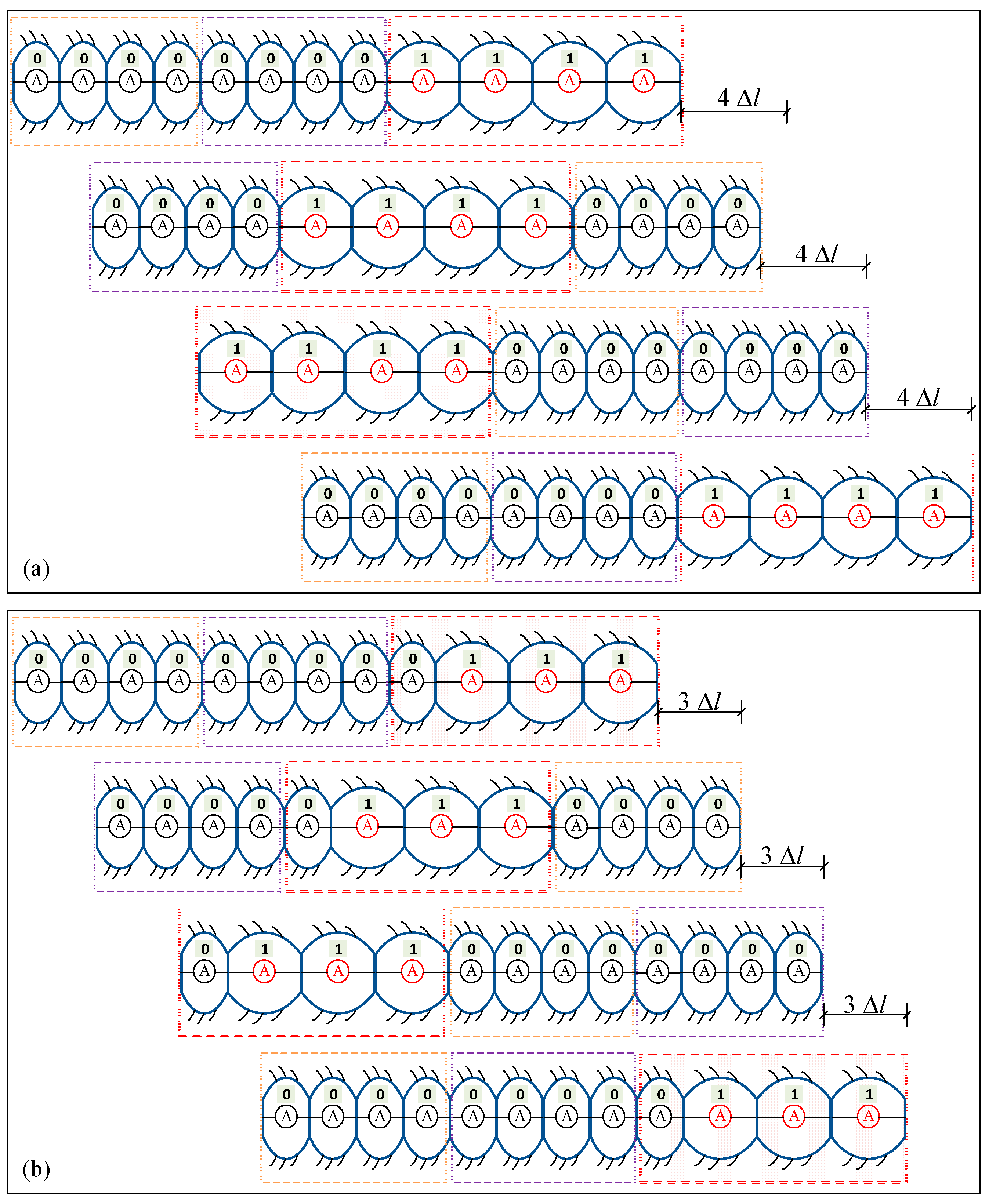
3.1.2. Illustrations for MG-I
3.2. Driven Module Waves with Overlapping
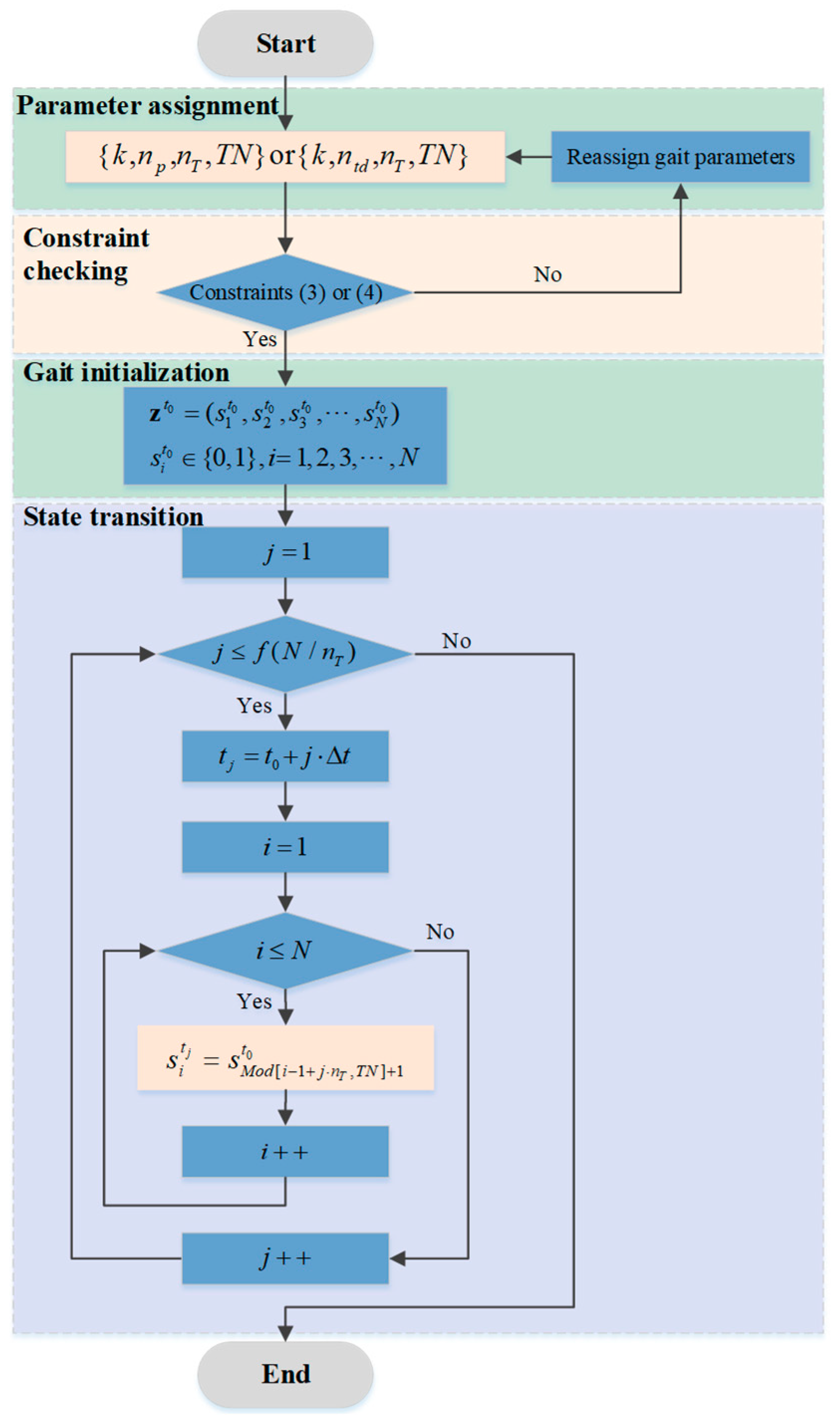
3.2.1. Generation Algorithm for MG-II
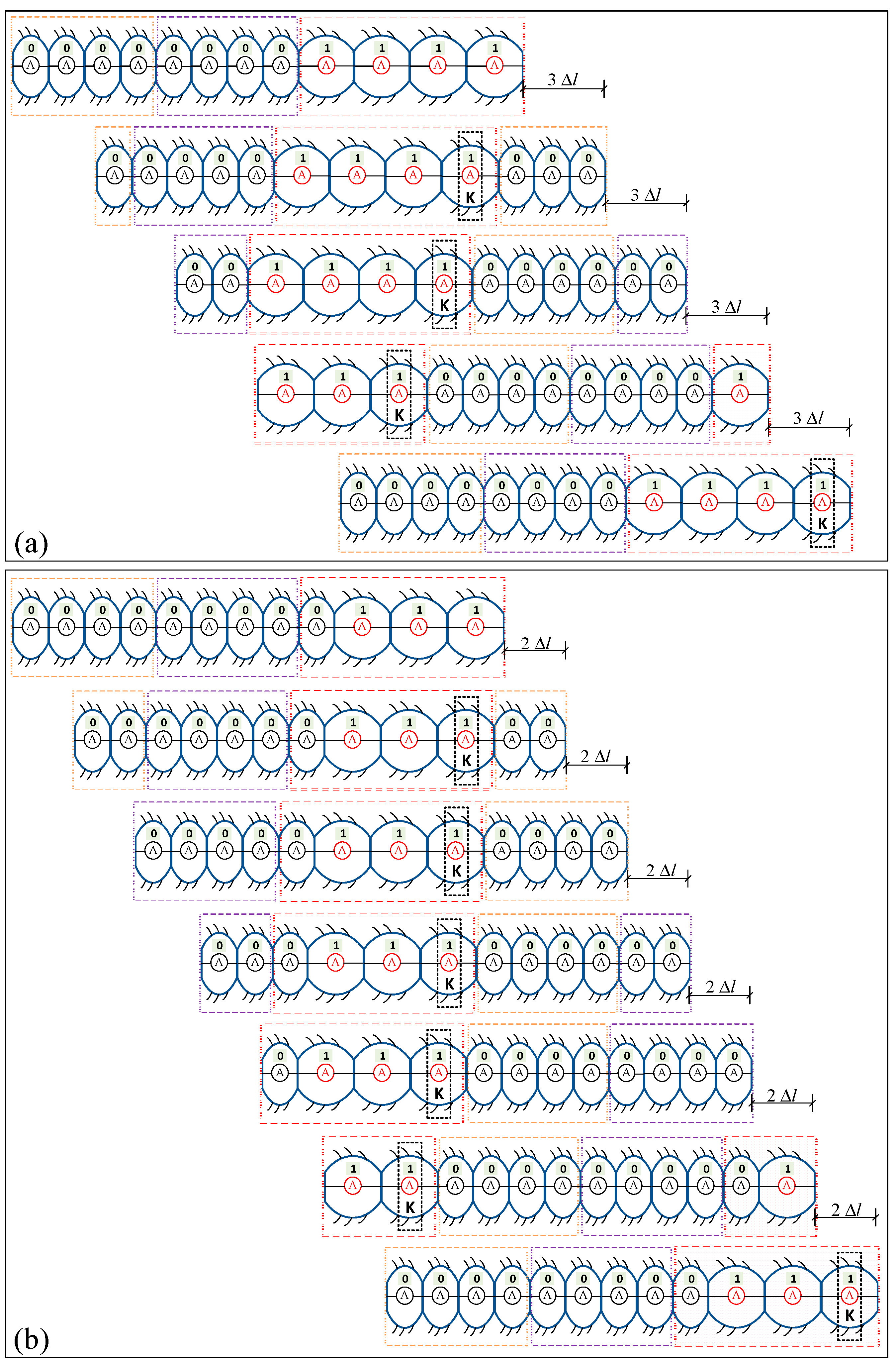
3.2.2. Illustrations for MG-II
4. Locomotion Simulation
4.1. The Locomotion Simulation of an Earthworm-like Robot
4.2. Gait Analysis and Discussions
5. Conclusions
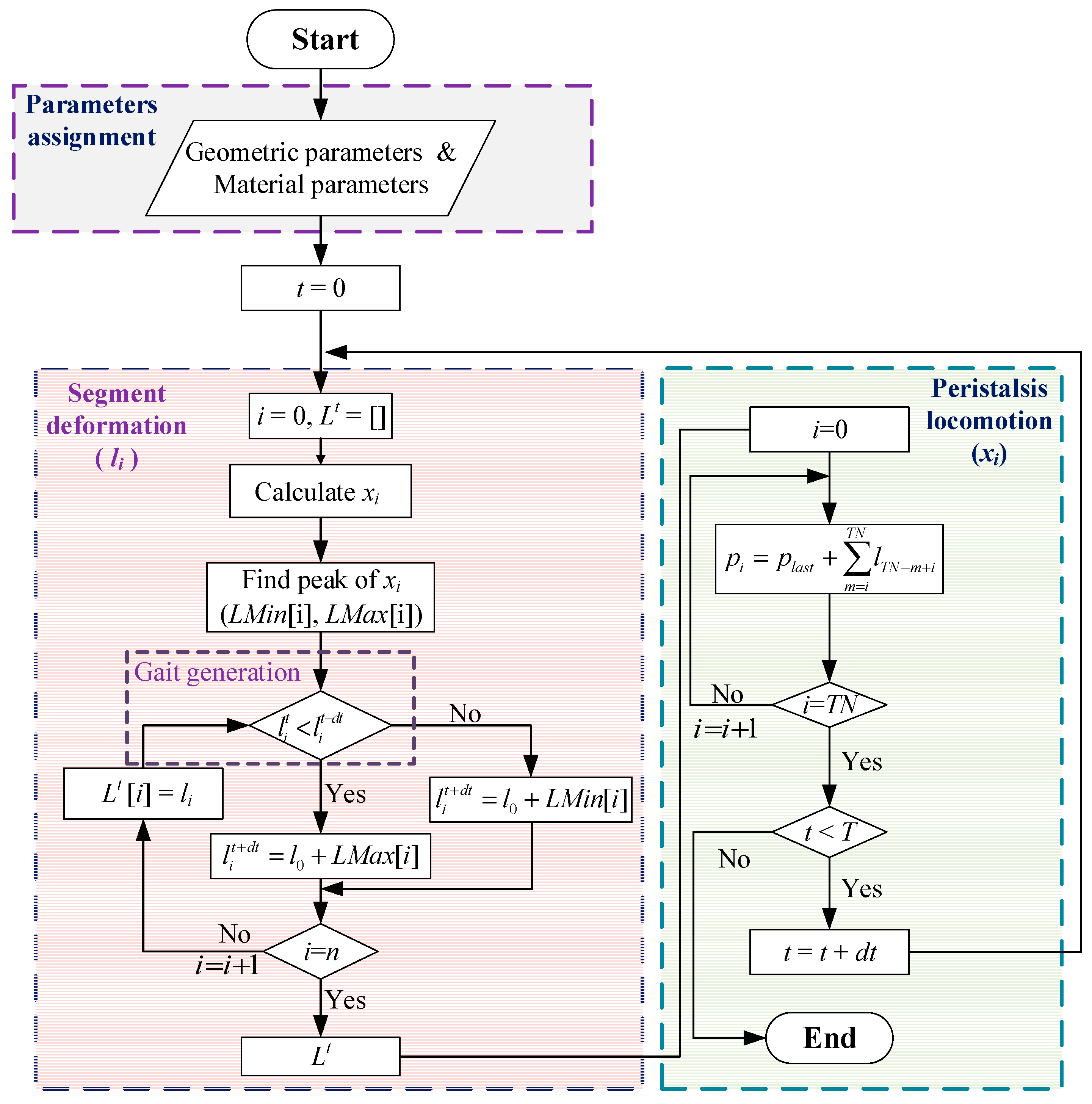
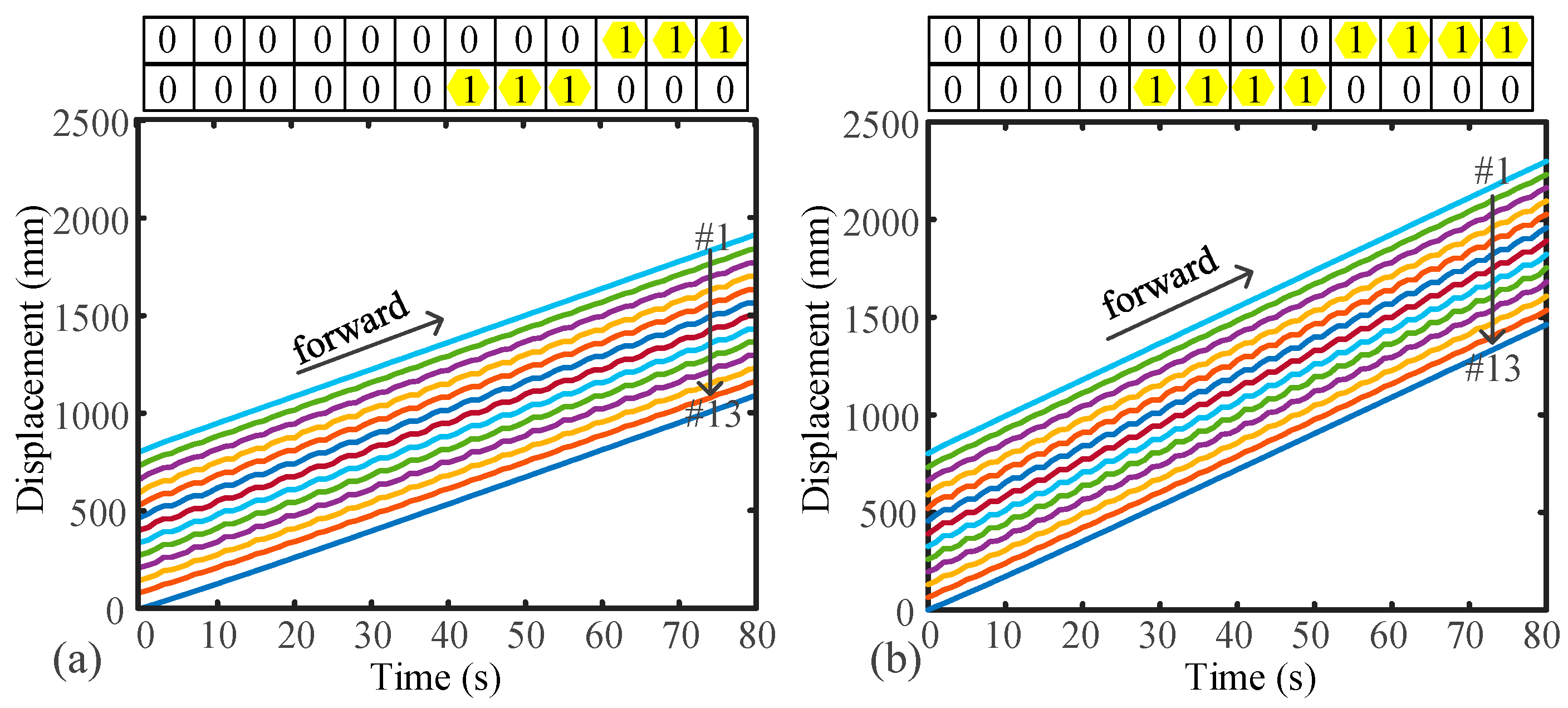
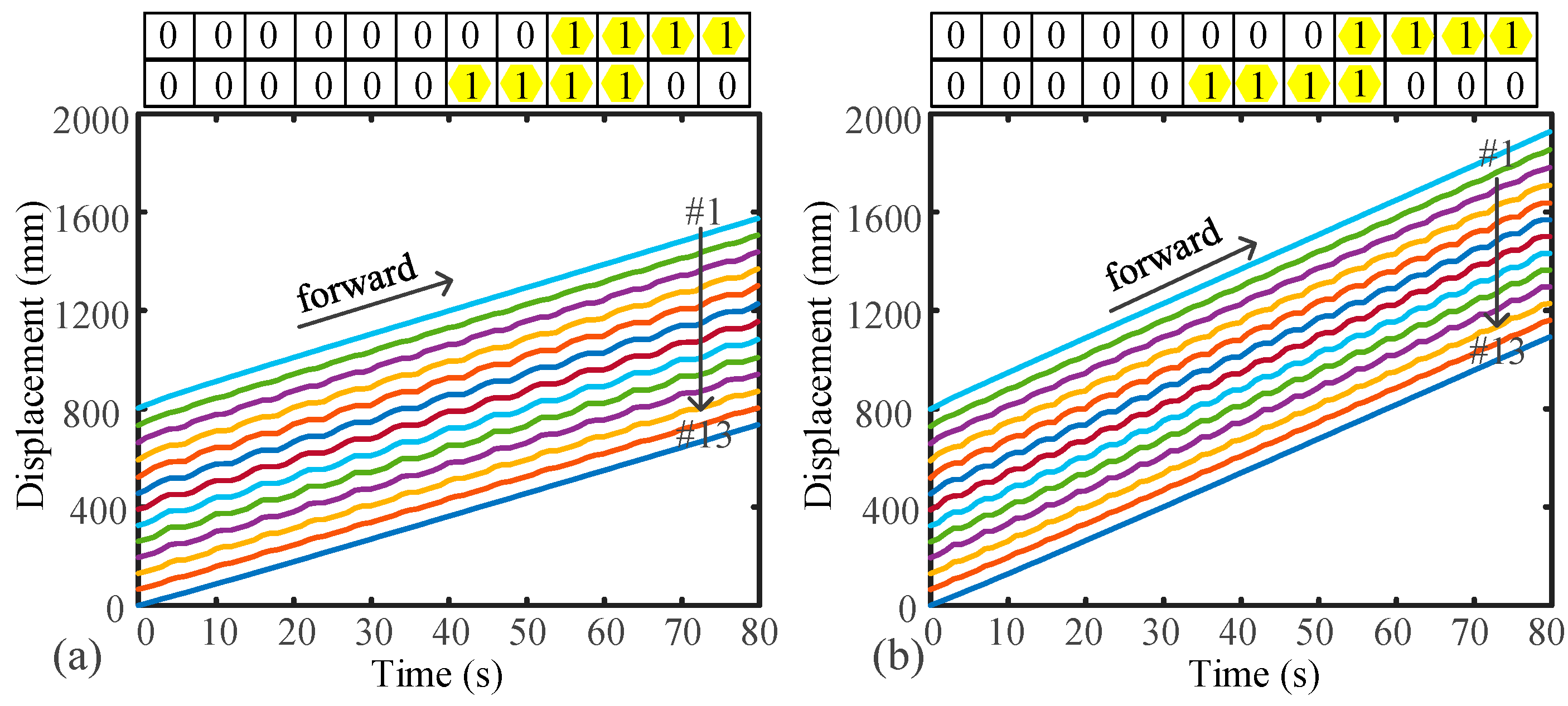
- A locomotion algorithm is proposed to simulate the locomotion of the soft, earthworm-like robot. The locomotion of a 12-segment earthworm-like robot is numerically simulated based on different modes. The locomotion speed of the earthworm-like robot is positively correlated with the frequency and amplitude of the receding peristaltic wave. The robot can obtain higher speeds when the proportion of the actuated segments increases. For the driven module containing n segments, the maximum speed is
- The average speeds for different locomotion modes are obtained. For the dielectric-elastomer-driven robot, the proportion of the number of actuated segments strongly affects the average speed. As the proportion of the number of actuated segments increases, the average speed increases;
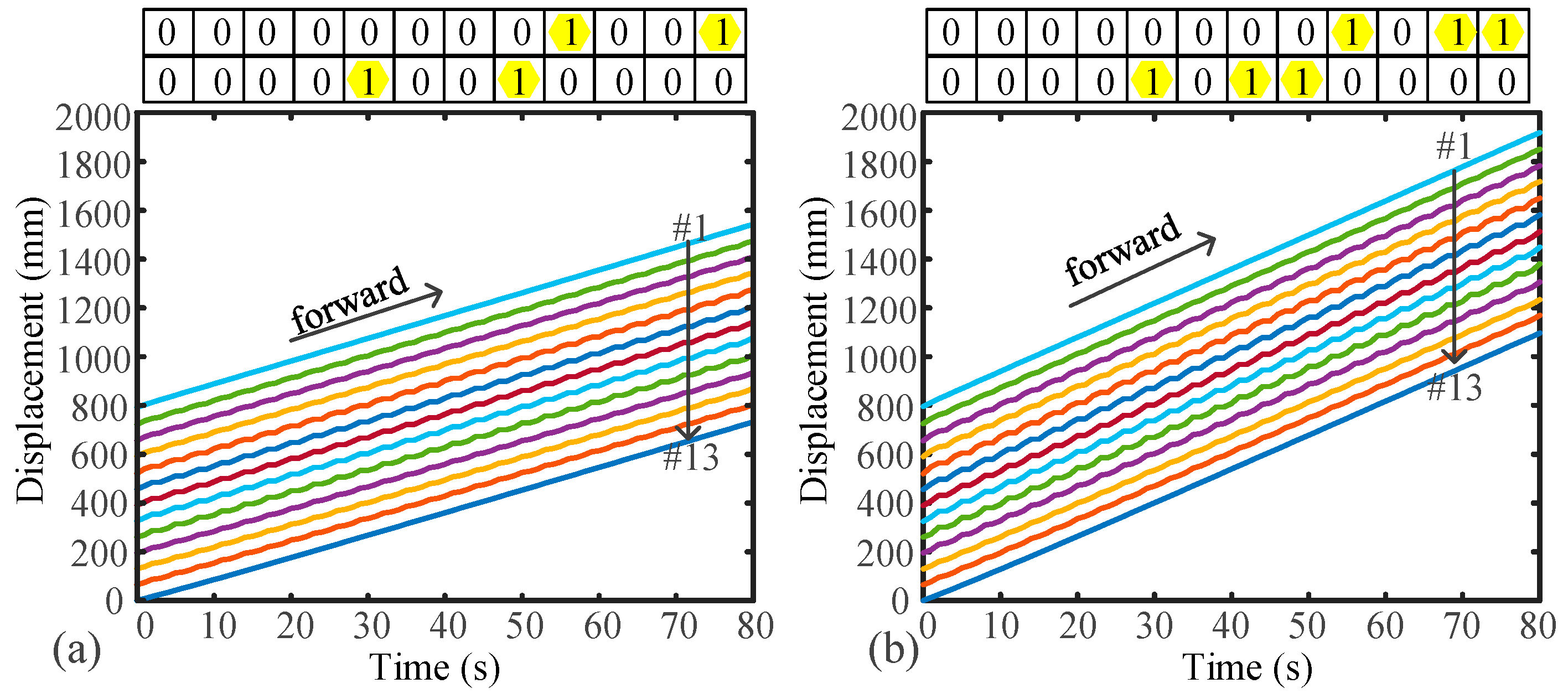
- When there are failed segments in the robot, a modular gait mode can be designed to improve the locomotion speed of the robot. For the driven module, npa = 3 and npr = 1, there are three different speeds: , 2, and 3.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lin, H.T.; Leisk, G.G.; Trimmer, B. GoQBot: A caterpillar-inspired soft-bodied rolling robot. Bioinspir. Biomim. 2011, 6, 026007. [Google Scholar] [CrossRef] [PubMed]
- Li, W.-B.; Zhang, W.-M.; Zou, H.-X.; Peng, Z.-K.; Meng, G. A Fast Rolling Soft Robot Driven by Dielectric Elastomer. IEEE/ASME Trans. Mechatron. 2018, 23, 1630–1640. [Google Scholar] [CrossRef]
- Zhong, B.; Zhang, S.; Xu, M.; Zhou, Y.; Fang, T.; Li, W. On a cpg-based hexapod robot: Amphihex-ii with variable stiffness legs. IEEE/ASME Trans. Mechatron. 2018, 23, 542–551. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Cao, Y.; Sarparast, M.; Yuan, H.; Dong, L.; Tan, X.; Cao, C. Soft Crawling Robots: Design, Actuation, and Locomotion. Adv. Mater. Technol. 2020, 5, 1900837. [Google Scholar] [CrossRef]
- Shepherd, R.F.; Ilievski, F.; Choi, W.; Morin, S.A.; Stokes, A.A.; Mazzeo, A.D.; Chen, X.; Wang, M.; Whitesides, G.M. Multigait soft robot. Proc. Natl. Acad. Sci. USA 2011, 108, 20400–20403. [Google Scholar] [CrossRef] [Green Version]
- Fang, H.; Wang, C.; Li, S.; Xu, J.; Wang, K.W. Design and experimental gait analysis of a multi-segment in-pipe robot inspired by earthworm’s peristaltic locomotion. In Bioinspiration, Biomimetics, and Bioreplication 2014; SPIE: Bellingham, WA, USA, 2014; Volume 9055. [Google Scholar]
- Du, Z.; Fang, H.; Xu, J. Snake-worm: A Bi-modal Locomotion Robot. J. Bionic Eng. 2022, 19, 1272–1287. [Google Scholar] [CrossRef]
- Luo, Y.; Zhao, N.; Shen, Y.; Li, P. A Rigid Morphing Mechanism Enabled Earthworm-Like Crawling Robot. ASME J. Mech. Robotics. 2023, 15, 011008. [Google Scholar] [CrossRef]
- Zhan, X.; Xu, J.; Fang, H. In-plane gait planning for earthworm-like metameric robots using genetic algorithm. Bioinspir. Biomim. 2020, 15, 056012. [Google Scholar] [CrossRef]
- Zhan, X.; Fang, H.; Xu, J.; Wang, K.-W. Planar locomotion of earthworm-like metameric robots. Int. J. Robot. Res. 2019, 38, 1751–1774. [Google Scholar] [CrossRef]
- Rafsanjani, A.; Zhang, Y.; Liu, B.; Rubinstein, S.M.; Bertoldi, K. Kirigami skins make a simple soft actuator crawl. Sci. Robot. 2018, 3, eaar7555. [Google Scholar] [CrossRef] [Green Version]
- Kandhari, A.; Huang, Y.; Daltorio, K.A.; Chiel, H.J.; Quinn, R.D. Body stiffness in orthogonal directions oppositely affects worm-like robot turning and straight-line locomotion. Bioinspir. Biomim. 2018, 13, 026003. [Google Scholar] [CrossRef] [PubMed]
- Kandhari, A.; Mehringer, A.; Chiel, H.J.; Quinn, R.D.; Daltorio, K.A. Design and Actuation of a Fabric-Based Worm-Like Robot. Biomimetics 2019, 4, 13. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schwebke, S.; Behn, C. Worm-like robotic systems: Generation, analysis and shift of gaits using adaptive control. Artif. Intell. Res. 2012, 1, p12. [Google Scholar] [CrossRef]
- Fang, H.; Wang, C.; Li, S.; Wang, K.W.; Xu, J. A comprehensive study on the locomotion characteristics of a metameric earthworm-like robot Part B: Gait analysis and experiments. Multibody Syst. Dyn. 2015, 35, 153–177. [Google Scholar] [CrossRef]
- Santhosh, S.; Serra, M. Optimal locomotion for limbless crawlers. Phys. Rev. E 2022, 106, 024610. [Google Scholar] [CrossRef]
- Agostinelli, D.; Alouges, F.; DeSimone, A. Peristaltic Waves as Optimal Gaits in Metameric Bio-Inspired Robots. Front. Robot. AI 2018, 5, 99. [Google Scholar] [CrossRef] [Green Version]
- Fang, H.; Li, S.; Wang, K.W.; Xu, J. Phase coordination and phase–velocity relationship in metameric robot locomotion. Bioinspir. Biomim. 2015, 10, 066006. [Google Scholar] [CrossRef]
- Chapman, G. Of the Movement of Worms. J. Exp. Biol. 1950, 27, 29–39. [Google Scholar] [CrossRef]
- Quillin, K.J. Kinematic scaling of locomotion by hydrostatic animals: Ontogeny of peristaltic crawling by the earthworm lumbricus terrestris. J. Exp. Biol. 1999, 202, 661. [Google Scholar] [CrossRef]
- Kurth, J.A.; Kier, W.M. Differences in scaling and morphology between lumbricid earthworm ecotypes. J. Exp. Biol. 2015, 218, 2970–2978. [Google Scholar] [CrossRef] [Green Version]
- Ilami, M.; Bagheri, H.; Ahmed, R.; Skowronek, E.O.; Marvi, H. Materials, Actuators, and Sensors for Soft Bioinspired Robots. Adv. Mater. 2021, 33, e2003139. [Google Scholar] [CrossRef]
- Cianchetti, M.; Laschi, C.; Menciassi, A.; Dario, P. Biomedical applications of soft robotics. Nat. Rev. Mater. 2018, 3, 143–153. [Google Scholar] [CrossRef]
- Hines, L.; Petersen, K.H.; Lum, G.Z.; Sitti, M. Soft Actuators for Small-Scale Robotics. Adv. Mater. 2017, 29, 1603483. [Google Scholar] [CrossRef]
- Mosadegh, B.; Polygerinos, P.; Keplinger, C.; Wennstedt, S.; Shepherd, R.; Gupta, U.; Shim, J.; Bertoldi, K.; Walsh, C.J.; Whitesides, G.M. Pneumatic Networks for Soft Robotics that Actuate Rapidly. Adv. Funct. Mater. 2014, 24, 2163–2170. [Google Scholar] [CrossRef] [Green Version]
- Kim, W.; Seo, B.; Yu, S.Y.; Cho, K.J. Deployable soft pneumatic networks (d-pneunets) actuator with dual-morphing origami chambers for high-compactness. IEEE Robot. Autom. Lett. 2022, 7, 1262–1269. [Google Scholar] [CrossRef]
- Guo, Y.; Liu, L.; Liu, Y.; Leng, J. Review of Dielectric Elastomer Actuators and Their Applications in Soft Robots. Adv. Intell. Syst. 2021, 3. [Google Scholar] [CrossRef]
- Calderón, A.A.; Ugalde, J.C.; Chang, L.; Zagal, J.C.; Pérez-Arancibia, N.O. An earthworm-inspired soft robot with perceptive artificial skin. Bioinspir. Biomim. 2019, 14, 056012. [Google Scholar] [CrossRef]
- Ozkan-Aydin, Y.; Liu, B.; Ferrero, A.C.; Seidel, M.; Hammond, F.L.; Goldman, D.I. Lateral bending and buckling aids biological and robotic earthworm anchoring and locomotion. Bioinspir. Biomim. 2021, 17, 016001. [Google Scholar] [CrossRef] [PubMed]
- Ge, J.Z.; Calderon, A.A.; Perez-Arancibia, N.O. An earthworm-inspired soft crawling robot controlled by friction. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, Macao, 5–8 December 2017; pp. 834–841. [Google Scholar]
- Liang, W.; Liu, H.; Wang, K.; Qian, Z.; Ren, L.; Ren, L. Comparative study of robotic artificial actuators and biological muscle. Adv. Mech. Eng. 2020, 12, 2072262428. [Google Scholar] [CrossRef]
- Pelrine, R.; Kornbluh, R.; Pei, Q.; Joseph, J. High-Speed Electrically Actuated Elastomers with Strain Greater Than 100%. Science 2000, 287, 836–839. [Google Scholar] [CrossRef] [PubMed]
- Gupta, U.; Qin, L.; Wang, Y.; Godaba, H.; Zhu, J. Soft robots based on dielectric elastomer actuators: A review. Smart Mater. Struct. 2019, 28, 103002. [Google Scholar] [CrossRef]
- Li, W.B.; Zhang, W.M.; Zou, H.X.; Peng, Z.K.; Meng, G. Multisegment annular dielectric elastomer actuators for soft robots. Smart Mater. Struct. 2018, 27, 115024. [Google Scholar] [CrossRef]
- Li, B.; Chen, H.; Qiang, J.; Hu, S.; Zhu, Z.; Wang, Y. Effect of mechanical pre-stretch on the stabilization of dielectric elastomer actuation. J. Phys. D Appl. Phys. 2011, 44. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Chen, H.; Li, D. Leakage current and induced electrical energy dissipation in nonlinear oscillation of dielectric elastomer actuators. J. Phys. D Appl. Phys. 2017, 50, 365602. [Google Scholar] [CrossRef]
- Jiang, L.; Betts, A.; Kennedy, D.; Jerrams, S. Eliminating electromechanical instability in dielectric elastomers by employing pre-stretch. J. Phys. D Appl. Phys. 2016, 49, 265401. [Google Scholar] [CrossRef]
- Choi, H.R.; Ryew, S.; Jung, K.M.; Kim, H.M.; Jeon, J.W.; Nam, J.D.; Maeda, R.; Tanie, K. Microrobot actuated by soft actuators based on dielectric elastomer. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots & Systems, Lausanne, Switzerland, 30 September–4 October 2002. [Google Scholar]
- Pfeil, S.; Henke, M.; Katzer, K.; Zimmermann, M.; Gerlach, G. A Worm-Like Biomimetic Crawling Robot Based on Cylindrical Dielectric Elastomer Actuators. Front. Robot. AI 2020, 7, 9. [Google Scholar] [CrossRef]
- Du, Y.; Cao, C.; Wu, X.; Xue, J.; Wang, L.; Gao, X. A low-profile vibration crawling robot driven by a planar dielectric elastomer actuator. In Proceedings of the 2022 IEEE International Conference on Real-time Computing and Robotics (RCAR), Guiyang, China, 17–22 July 2022; pp. 413–418. [Google Scholar]
- Mihai, D.; David, R.C.; Robert, J.W. A high speed soft robot based on dielectric elastomer actuators. IEEE Int. Conf. Robot. Autom. (ICRA) 2017, 5, 466–474. [Google Scholar]
- Zhao, W.; Zhang, Y.; Wang, N. Soft robotics: Research, challenges, and prospects. J. Robot. Mechatron. 2021, 33, 45–68. [Google Scholar] [CrossRef]
- Xu, L.; Chen, H.-Q.; Zou, J.; Dong, W.-T.; Gu, G.-Y.; Zhu, L.-M.; Zhu, X.-Y. Bio-inspired annelid robot: A dielectric elastomer actuated soft robot. Bioinspir. Biomim. 2017, 12, 025003. [Google Scholar] [CrossRef] [Green Version]
- Lu, X.; Wang, K.; Hu, T. Development of an annelid-like peristaltic crawling soft robot using dielectric elastomer actuators. Bioinspir. Biomim. 2020, 15, 046012. [Google Scholar] [CrossRef]
- Nguyen, V.D.; La, N.T. An improvement of vibration-driven locomotion module for capsule robots. Mech. Based Des. Struct. Mach. 2020, 50, 1658–1672. [Google Scholar] [CrossRef]
- Wu, C.; Yan, H.; Cai, A.; Cao, C. A Dielectric Elastomer Actuator-Driven Vibro-Impact Crawling Robot. Micromachines 2022, 13, 1660. [Google Scholar] [CrossRef] [PubMed]
- Akbarimajd, A.; Sotoudeh, N. Design and motion analysis of vibration-driven small robot Rizeh. Adv. Robot. 2014, 28, 105–117. [Google Scholar] [CrossRef]
- Wang, X.J.; Meng, L.L.; Yao, Y.H.; Li, H.G. A vibration-driven locomotion robot excited by time-varying stiffness. Int. J. Mech. Sci. 2023, 243, 108009. [Google Scholar] [CrossRef]
- Diao, B.; Zhang, X.; Fang, H.; Xu, J. Bi-objective optimization for improving the locomotion performance of the vibration-driven robot. Arch. Appl. Mech. 2021, 91, 2073–2088. [Google Scholar] [CrossRef]
- Gu, G.-Y.; Gupta, U.; Zhu, J.; Zhu, L.-M.; Zhu, X. Modeling of Viscoelastic Electromechanical Behavior in a Soft Dielectric Elastomer Actuator. IEEE Trans. Robot. 2017, 33, 1263–1271. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Modes | Constraint Conditions | The Average Speeds |
|---|---|---|
| The U-DM with MG-I | ||
| The U-DM with MG-II | ||
| The B-DM with MG-I | ||
| The B-DM with MG-II |
| The Number of Body Segments in a Driven Module (n) | Driven Modules | Wave Transmission Modes | Average Speeds |
|---|---|---|---|
| n=3 | U-DM | MG-I | |
| MG-II | |||
| n=4 | U-DM | MG-I | |
| MG-II | |||
| B-DM (npa = 3, npr = 1) | MG-I | ||
| MG-II |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qi, Z.; Sun, X. The Modular Gait Design of a Soft, Earthworm-like Locomotion Robot Driven by Ultra-Low Frequency Excitation. Appl. Sci. 2023, 13, 2723. https://doi.org/10.3390/app13042723
Qi Z, Sun X. The Modular Gait Design of a Soft, Earthworm-like Locomotion Robot Driven by Ultra-Low Frequency Excitation. Applied Sciences. 2023; 13(4):2723. https://doi.org/10.3390/app13042723
Chicago/Turabian StyleQi, Zhifeng, and Xiuting Sun. 2023. "The Modular Gait Design of a Soft, Earthworm-like Locomotion Robot Driven by Ultra-Low Frequency Excitation" Applied Sciences 13, no. 4: 2723. https://doi.org/10.3390/app13042723