
Upper-Bound Limit Analysis of Ultimate Pullout Capacity of Expanded Anchor Cable

Abstract
:1. Introduction
2. Construction of Failure Model
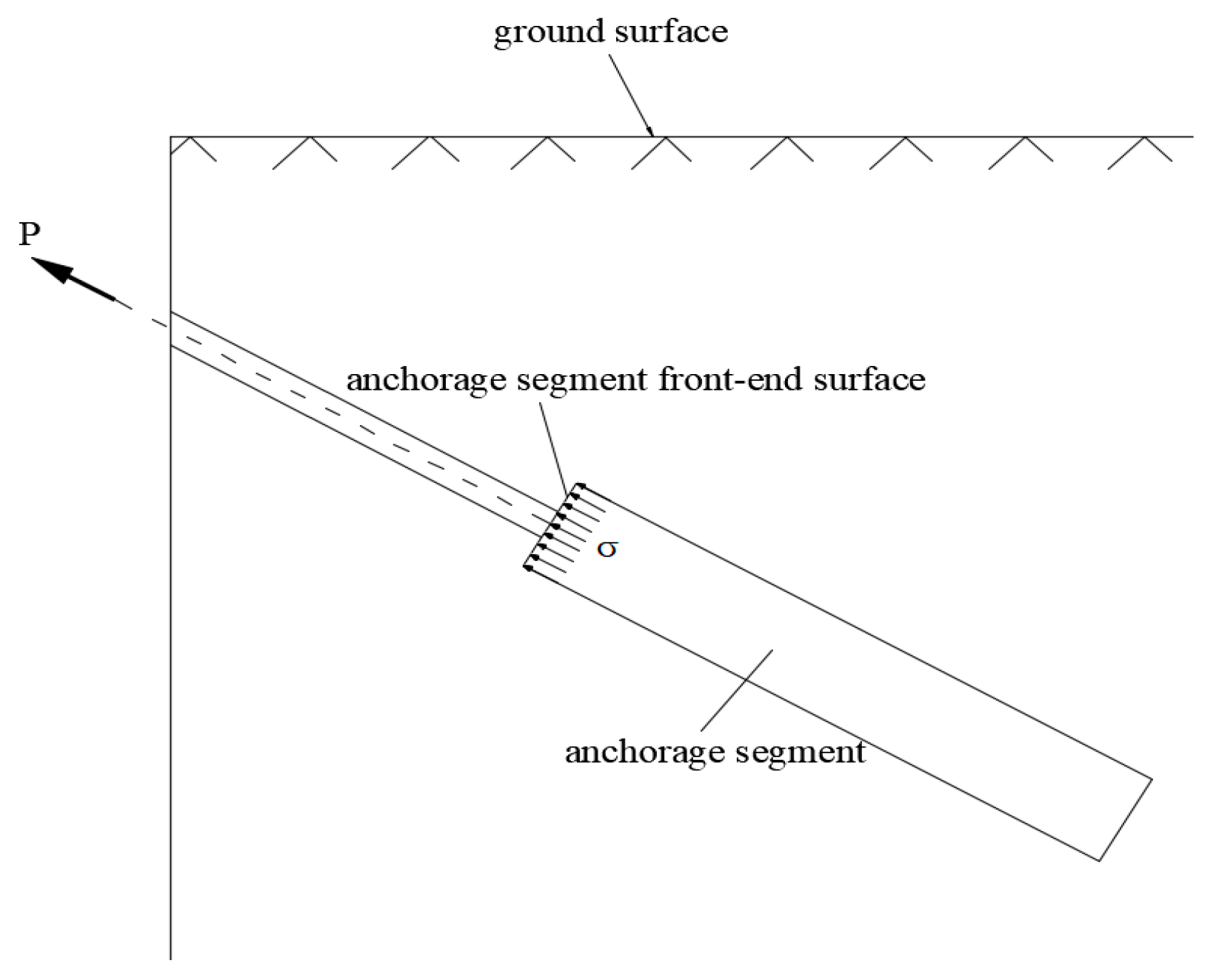
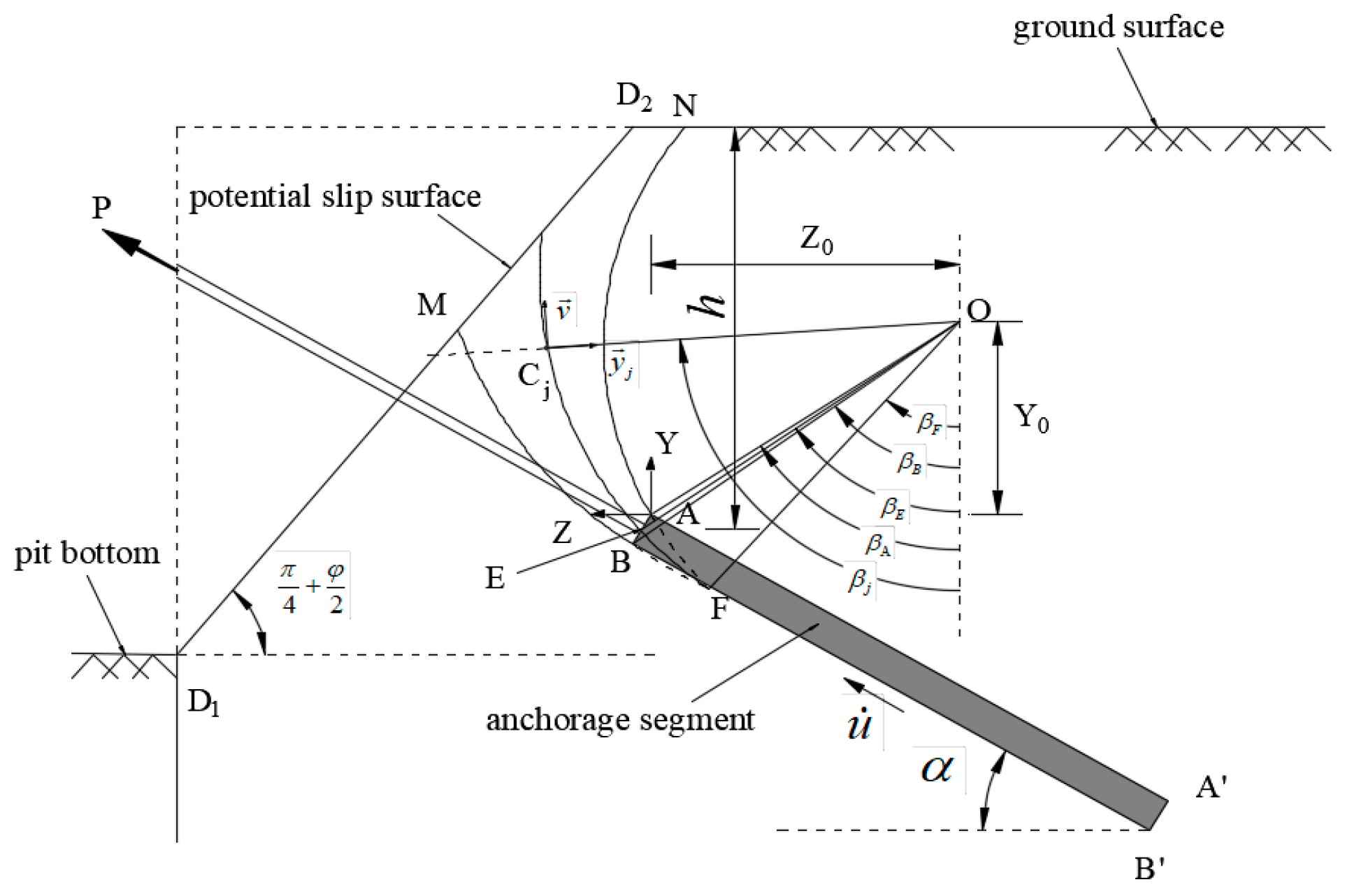
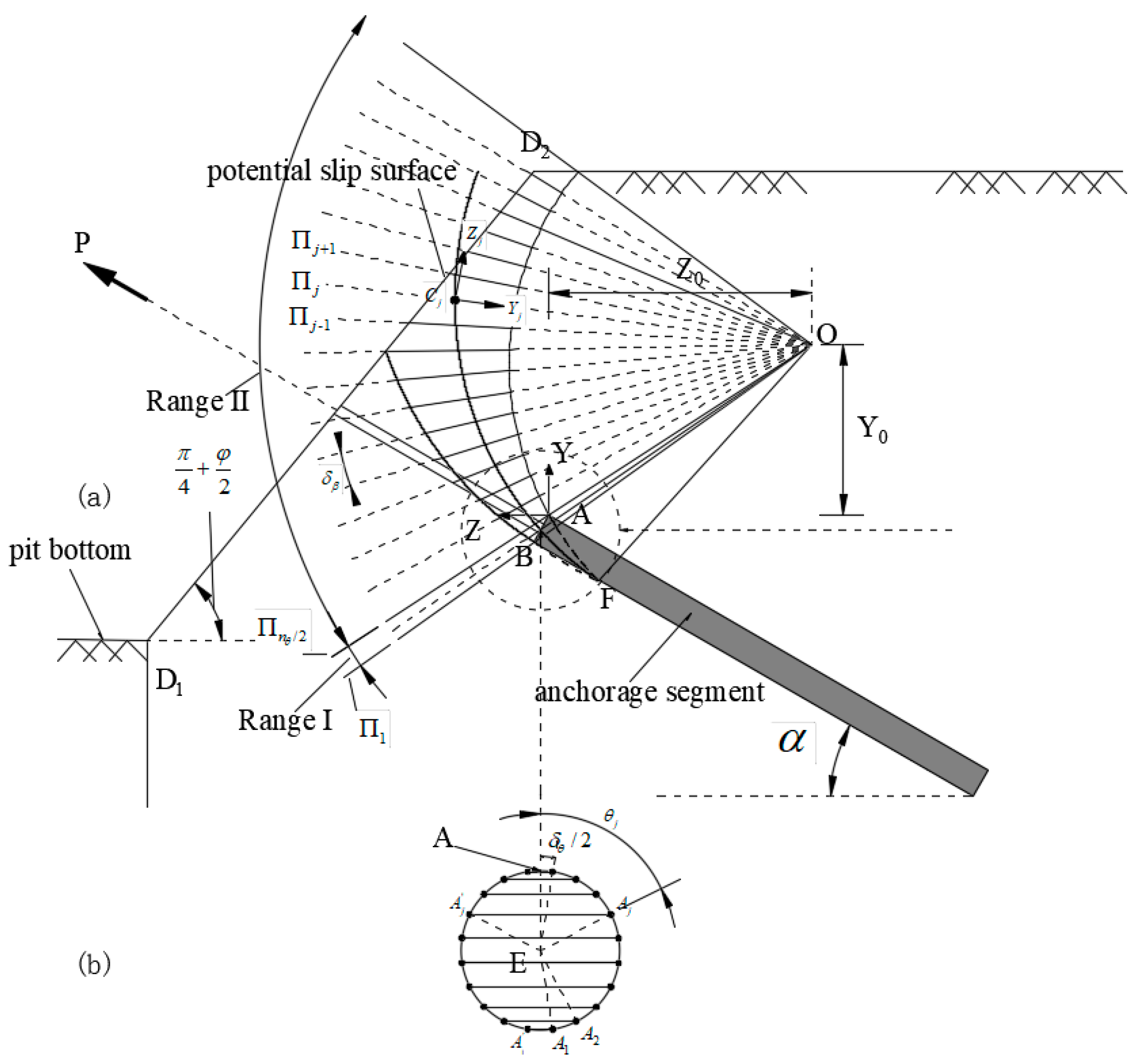
2.1. Failure Model of the Soil Region at the Front Surface of the Anchorage Segment
- (1)
- Failure mechanism
- (2)
- Velocity field
- (3)
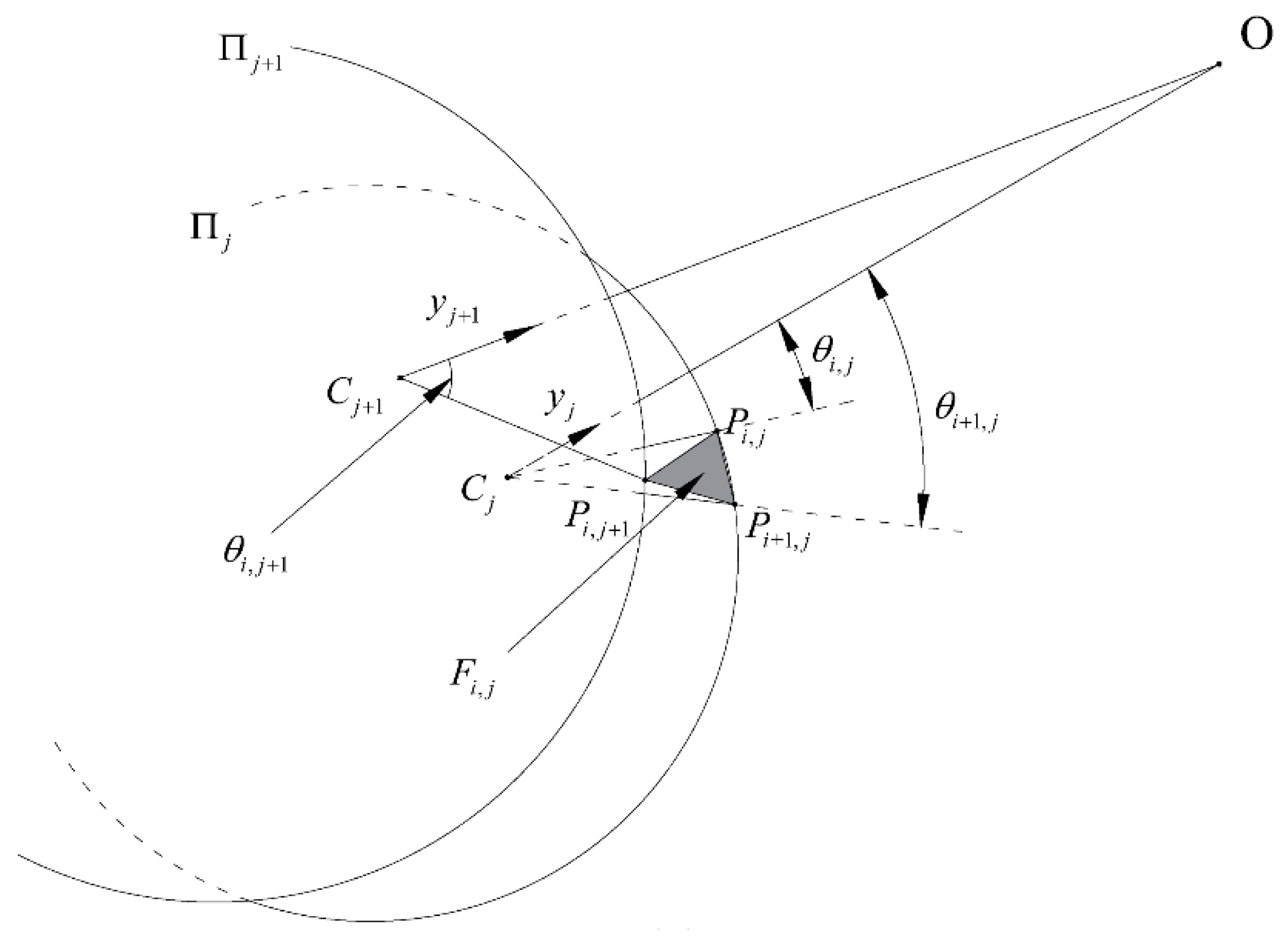
- Geometrical construction of the 3D velocity discontinuity surface in logarithmic spiral region
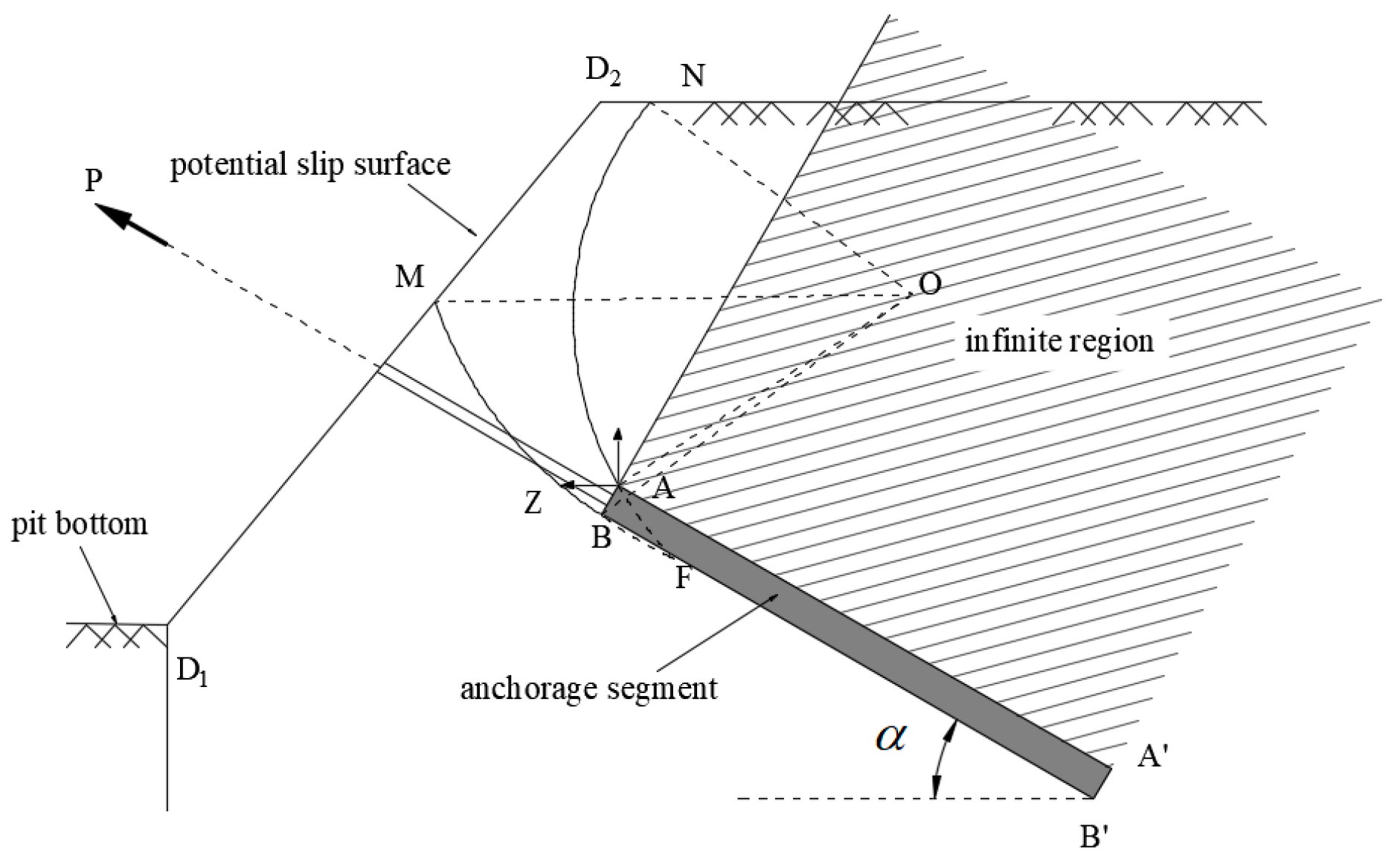
2.2. The Failure Model of the Anchorage Segment Region
- (1)
- Failure mechanism
- (2)
- Velocity field
3. Upper-Bound Solution of Ultimate Pullout Capacity of Expanded Anchor Cable
3.1. Calculation Theory of Upper-Bound Theorem of Limit Analysis
3.2. Ultimate End Resistance Calculation
3.2.1. Power Calculation of Logarithmic Spiral Region
3.2.2. Determination of Minimum Upper-Bound Solution of End Resistance
3.3. Ultimate Lateral Resistance Calculation
- (1)
- Rate of internal energy dissipation of the anchorage segment region
- (2)
- Rate of work of anchorage segment weight
4. Example Analysis and Solution Validation
4.1. Theoretical Solution
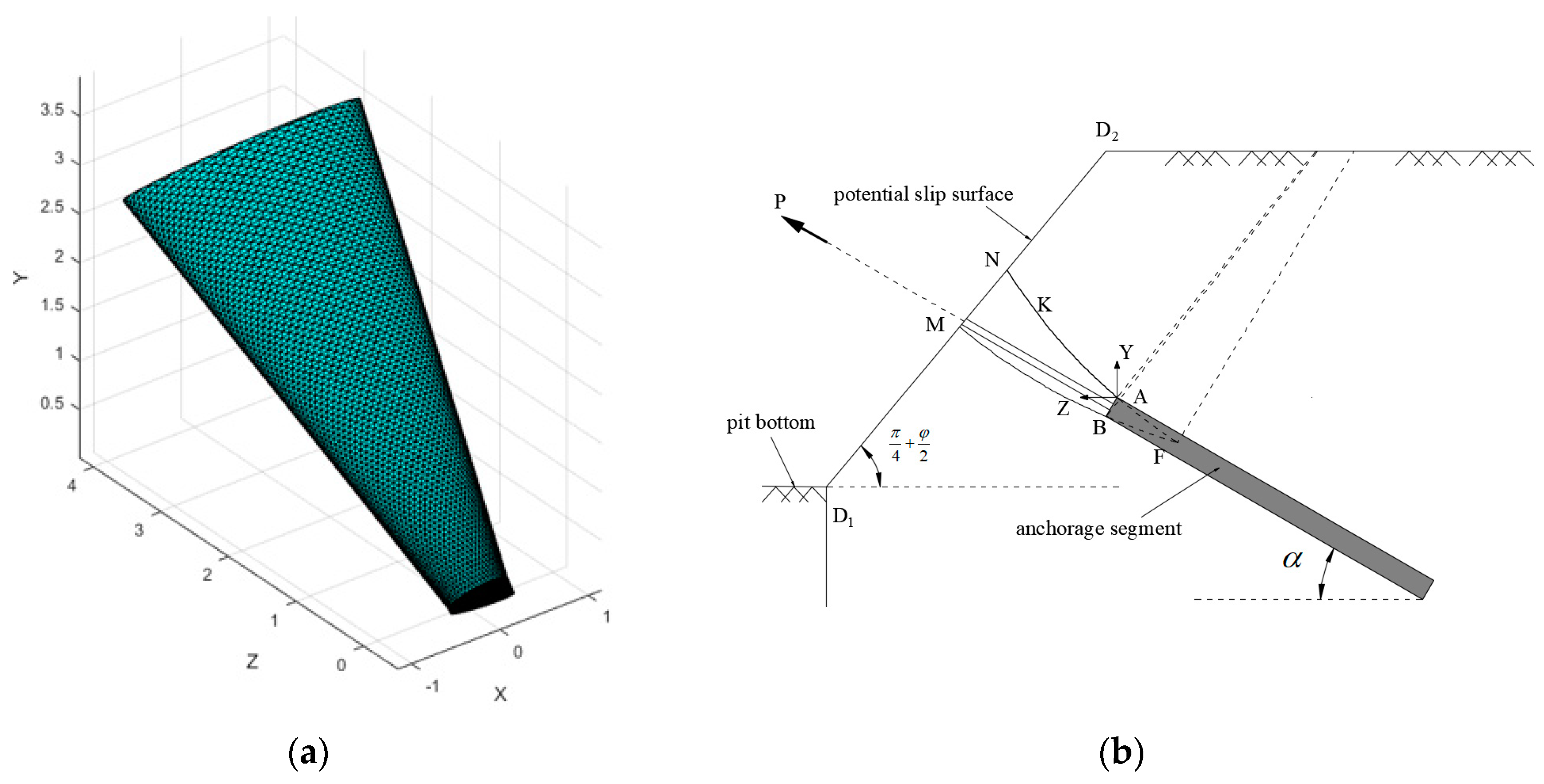
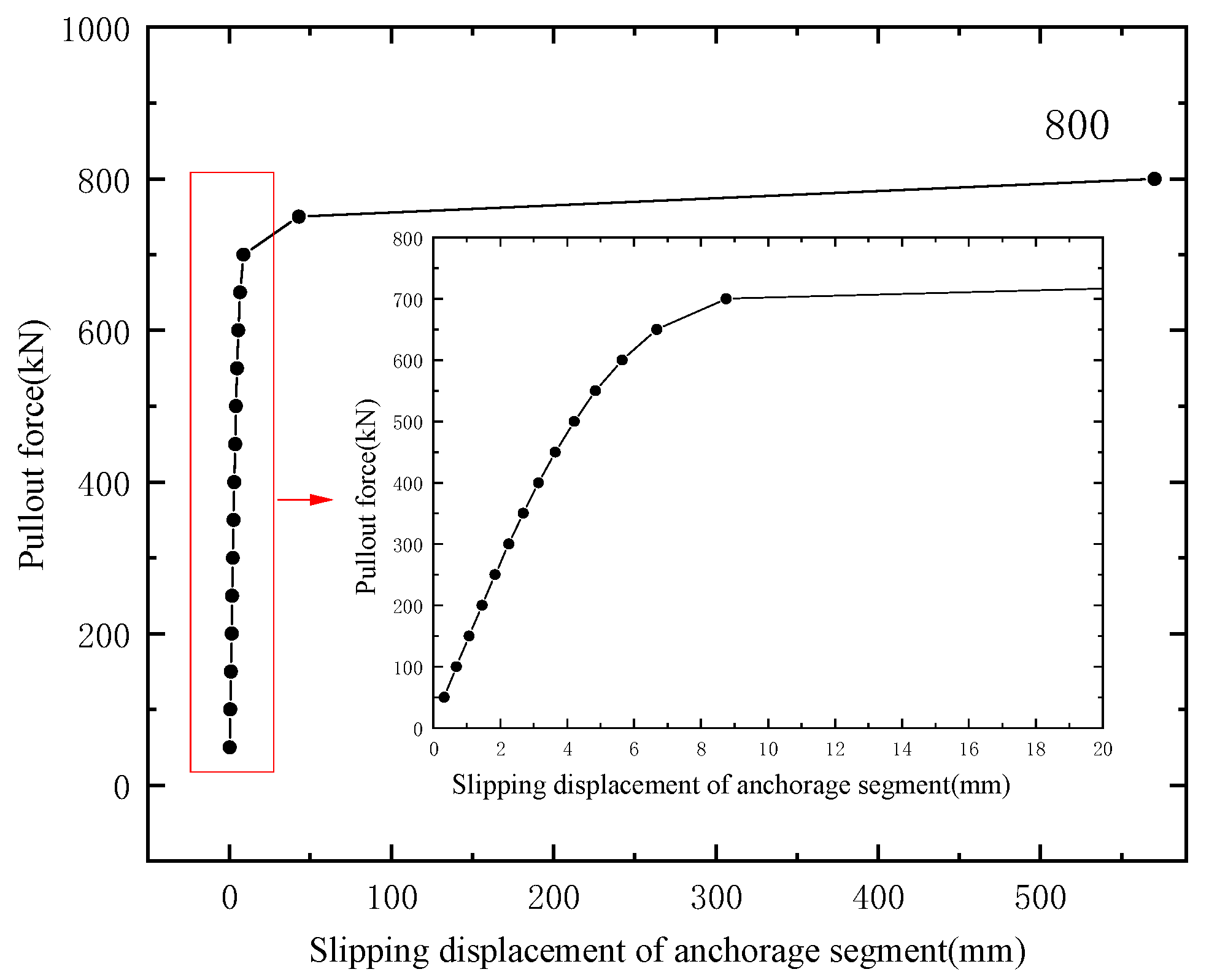
4.2. Numerical Solution
4.3. Solution Validation
5. Model Application
5.1. Effect of Anchorage Segment Diameter
5.2. Effect of Anchorage Segment Length
5.3. Effect of the Inclination Angle of the Anchor Cable
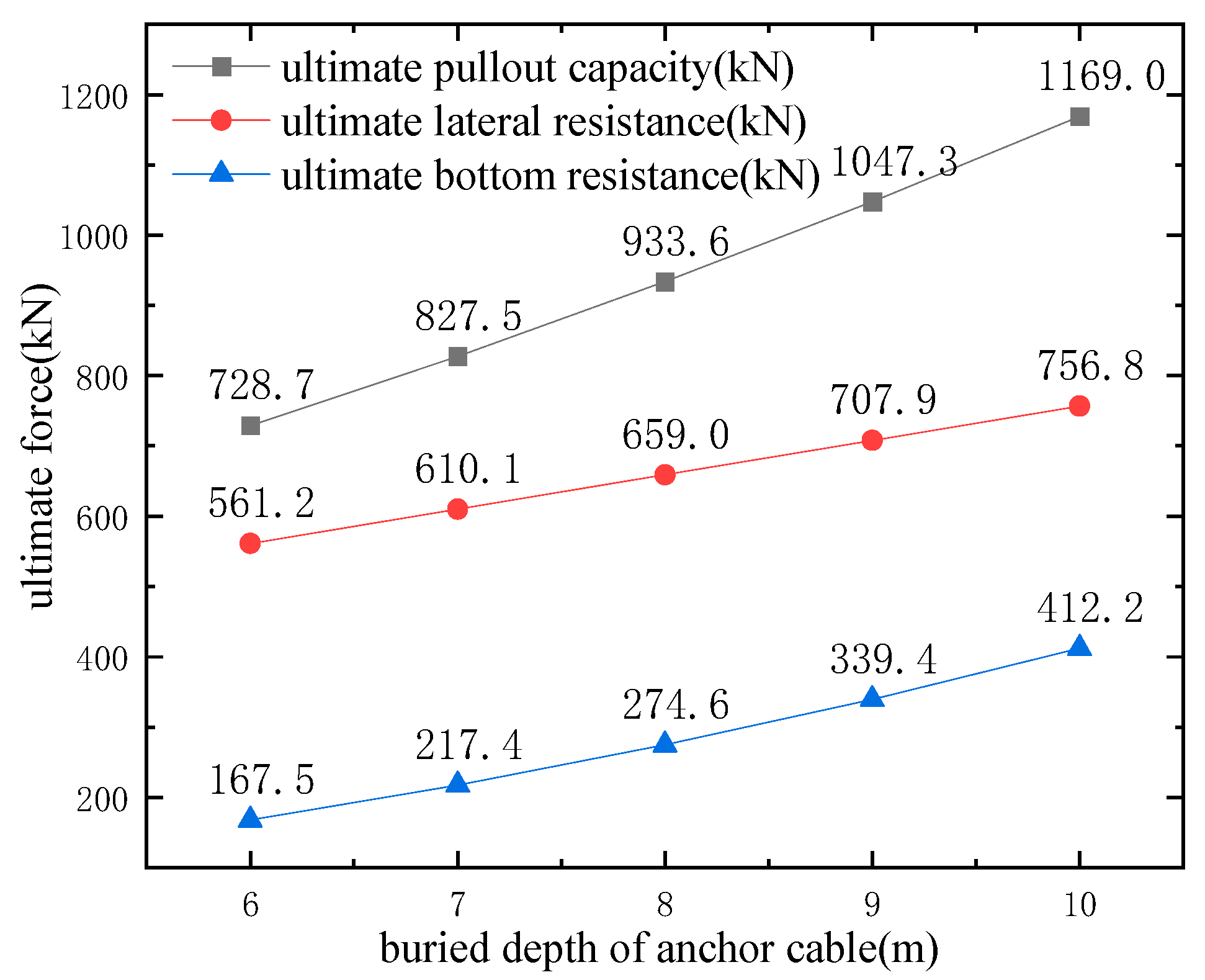
5.4. Effect of the Buried Depth of the Anchor Cable
6. Conclusions
- (1)
- A failure model of an expanded anchor cable located in a homogeneous stratum was constructed. The logarithmic spiral failure model was used as the failure model of the soil region at the front surface of the anchorage segment, representing the first time that this model has been implemented to calculate the end resistance of an expanded anchor cable. The failure mechanism of the anchorage side surface was assumed to satisfy the slippage model. The expressions of the ultimate lateral resistance and ultimate end resistance could be derived, respectively, from the power calculations for the two models and several algebraic operations. Due to the particularity of the boundary conditions in this paper, the rotation center points of the logarithmic spiral lines were uncertain. Therefore, the particle swarm optimization algorithm was used to determine the optimal solution of the end resistance.
- (2)
- The theoretical calculation results were compared with the numerical simulation in three cases. The results showed that the error between the numerical solution and the theoretical solution for the lateral resistance in the three cases was only 6.0%; however, the error for the end resistance was relatively large, though still within 30%, and so the maximum error for the ultimate pullout capacity was 7.7%. These errors were much smaller than the errors between the numerical simulation and the theoretical calculation method proposed in [18] for the same cases. This indicated that the proposed theoretical model had high reliability and superiority in the analysis of the ultimate pullout capacity of the expanded anchor cable.
- (3)
- The ultimate lateral resistance and total ultimate pullout capacity increased significantly with the increase in the anchorage segment diameter, anchorage segment length, and buried depth of the expanded anchor cable. The ultimate end resistance increased significantly with the buried depth, increased slightly with the anchorage segment diameter, and was almost unaffected by the anchorage segment length.
- (4)
- With the increase in the inclination angle of the anchor cable, the end resistance and the ultimate pullout capacity gradually decreased, while the lateral resistance increased first and then decreased. However, in general, the change in the inclination angle of the anchor cable had a relatively small effect on the ultimate lateral resistance.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Qian, Q.; Chen, X. Fully Developing and Utilizing Underground Space to Construct Resource-saving and Environment-friendly City. Chin. Civil Air Defence. 2007, 9, 15–18. [Google Scholar]
- Sun, Y.S.; Li, Z.M. Analysis of Deep Foundation Pit Pile-Anchor Supporting System Based on FLAC3D. Geofluids 2022, 2022, 1699292. [Google Scholar] [CrossRef]
- Fujita, K. A method to predict the load-displacement relationship of ground anchors. In Proceeding of the 9th International Conference on Soil Mechanics and Foundation Engineering; The Japanese Society of Soil: Tokyo, Japan, 1977; pp. 58–62. [Google Scholar]
- Barley, A.D.; Hossain, D.; Liao, H.J.; Hsu, S.T. Should grouted anchors have short tendon bond Length? J. Geotech. Geoenvironmental Eng. 1999, 125, 808–812. [Google Scholar] [CrossRef]
- Peng, H.; Xiao, X.Q.; Dong, Z.Y. Study on Deformation Influence of Deep Foundation Pit Pile-anchor Supporting System Nearby Metro Structure. Appl. Mech. Mater. 2014, 638–640, 1190–1194. [Google Scholar] [CrossRef]
- Liu, Z.; Guo, G. Application of innovation underreamed ground anchorage with capsule. In Proceedings of the International Conference Organized by the Deep Foundations Institute, Melbourne, Australia, 4–7 December 2017; pp. 310–319. [Google Scholar]
- Lin, G.; Zhang, L.; Wen, Z. Numerical Simulation on Expanded Anchor rod Supporting System for Deep Foundation Pit. Subgrade Eng. 2015, 92–98+111. [Google Scholar] [CrossRef]
- Evans, T.M.; Nan, Z. Three-Dimensional Simulations of Plate Anchor Pullout in Granular Materials. Int. J. Geomech. 2019, 19. [Google Scholar] [CrossRef]
- Hsu, S.T.; Wang, C.C.; Wu, S.; Tung, H.C. Computer simulation on the uplift behavior of an arrayed under-reamed anchor group in dense sand. In Proceedings of the International Conference on Systems and Informatics, Hangzhou, China, 11–13 November 2017; pp. 546–551. [Google Scholar]
- Hsu, S.T. A numerical study on the uplift behavior of underreamed anchors in silty sand. Adv. Mater. Res. 2011, 189–193, 2013–2018. [Google Scholar] [CrossRef]
- Serrano, A.; Olalla, C.; Gonzalez, J. Ultimate bearing capacity of rock masses based on the modified Hoek-Brown criterion. Int. J. Rock Mech. Min. Sci. 2000, 37, 1013–1018. [Google Scholar] [CrossRef]
- Liu, B.; Zhang, G.; Yang, W.; Ren, X.; Song, C. Mechanical Characters of Bit Expanded Anchor Rods in Saturated Fine Sand Stratum. Chin. J. Undergr. Space Eng. 2016, 12, 412–419. [Google Scholar]
- Wang, Z.; Wang, Q.-k.; Ma, S.-j.; Xue, Y.; Xu, S.-f. A method for calculating ultimate pullout force of recoverable under-reamed prestressed anchor cable. Rock Soil Mech. 2018, 39, 202–208. [Google Scholar]
- Ma, H.-C.; Tan, X.-H.; Qian, J.-Z.; Hou, X.-L. Theoretical analysis of anchorage mechanism for rock bolt including local stripping bolt. Int. J. Rock Mech. Min. Sci. 2019, 122, 104080. [Google Scholar] [CrossRef]
- Gang, G.; Zhong, L.; Aiping, T.; Yibing, D.; Jiqiang, Z.; Roman, W.-W. Model Test Research on Bearing Mechanism of Underreamed Ground Anchor in Sand. Math. Probl. Eng. 2018, 2018, 9746438. [Google Scholar]
- Guo, G.; Yang, D.; Zhong, G.; Xue, Z.Z. Test and design method for the performance of anchor nodes between an underreamed anti-floating anchor and the bottom structure. Environ. Earth Sci. 2019, 371, 022079. [Google Scholar] [CrossRef]
- Zhang, J.; Jiang, Z. On-field Testing Bearing and Deformation Characteristics of Underreamed Compression Anchors. Chin. J. Undergr. Space Eng. 2018, 14, 554–558. [Google Scholar]
- Zeng, Q.-y.; Yang, X.-y.; Yang, C.-y. Mechanical mechanism and calculation method of bit expanded anchor rods. Rock Soil Mech. 2010, 31, 1359–1367. [Google Scholar]
- Liang, Y. Study on Anchoring Mechanism of Under-Reammed Pressive Ground Anchor; China Academy of Railway Sciences: Beijing, China, 2012. [Google Scholar]
- Mollon, G.; Dias, D.; Soubra, A.-H. Rotational failure mechanisms for the face stability analysis of tunnels driven by a pressurized shield. Int. J. Numer. Anal. Methods Geomech. 2011, 35, 1363–1388. [Google Scholar] [CrossRef]
- Mollon, G.; Phoon, K.K.; Dias, D.; Soubra, A.-H. Validation of a new 2D failure mechanism for the stability analysis of a pressurized tunnel face in a spatially varying sand. J. Eng. Mech. 2011, 137, 8–21. [Google Scholar] [CrossRef]
- Chen, W.F. Limit Analysis and Soil Plasticity; Elsevier: Amsterdam, The Netherlands, 1975. [Google Scholar]
- Zhang, F.; Gao, Y.F.; Wu, Y.X.; Zhang, N. Upper-bound solutions for face stability of circular tunnels in undrained clays. Géotechnique 2018, 68, 76–85. [Google Scholar] [CrossRef]
- Michalowski, R.L.; Drescher, A. Three-dimensional stability of slopes and excavations. Geotechnique 2009, 59, 839–850. [Google Scholar] [CrossRef]
- Tang, X.W.; Liu, W.; Albers, B.; Savidis, S. Upper bound analysis of tunnel face stability in layered soils. Acta Geotech. 2014, 9, 661–671. [Google Scholar] [CrossRef]
- Zou, J.F.; Chen, G.H.; Qian, Z.H. Tunnel face stability in cohesion-frictional soils considering the soil arching effect by improved failure models. Comput. Geotech. 2019, 106, 1–17. [Google Scholar] [CrossRef]
- Mollon, G.; Dias, D.; Soubra, A.-H. Face stability analysis of circular tunnels driven by a pressurized shield. J. Geotech. Geoenvironmental Eng. 2010, 136, 215–229. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995. [Google Scholar]
- Pan, J.H.; Wang, H.; Yang, X.G. A random particle swarm optimization algorithm with application. Adv. Mater. Res. 2013, 634–638, 3940–3944. [Google Scholar] [CrossRef]
- Cheng, Y.; Xu, D. Foundation and Engineering Example of FLAC/FLAC3D; China Water & Power Press: Beijing, China, 2013. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Anchorage Segment Length (m) | Free Segment Length (m) | Anchorage Segment Diameter (m) | Inclination Angle of Anchor Cable (°) | Stratum Friction Angle (°) | Buried Depth (m) |
|---|---|---|---|---|---|---|
| M1 | 10 | 9 | 0.6 | 30 | 10.6 | 7 |
| M2 | 12 | 9 | 0.6 | 30 | 10.6 | 7 |
| M3 | 10 | 9 | 0.6 | 45 | 10.6 | 7 |
| Case | Lateral Resistance P1 (kN) | End Resistance P2 (kN) | Ultimate Pullout Force P (kN) |
|---|---|---|---|
| M1 | 610.1 | 217.4 | 861.7 |
| M2 | 761.5 | 217.4 | 1019.3 |
| M3 | 580.8 | 144.9 | 782.9 |
| Material | Density (kg/m3) | Elastic Modulus (MPa) | Shear Modulus (MPa) | Friction Angle (°) | Cohesion (kPa) |
|---|---|---|---|---|---|
| Steel strand | 7800 | 200,000 | 77,000 | - | - |
| Soil | 1770 | 13.5 | 5 | 10.6 | 8.0 |
| Bearing body | 7000 | 22,000 | 9361.70 | - | - |
| Grouting body | 2200 | 21,897 | 9317.87 | 50.2 | 1960 |
| Case | Lateral Resistance P1 (kN) | End Resistance P2 (kN) | Ultimate Pullout Capacity P (kN) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Numerical | Theoretical | Error (%) | Numerical | Theoretical | Error (%) | Numerical | Theoretical | Error (%) | |
| M1 | 575.5 | 610.1 | 6.0 | 176.5 | 217.4 | 23.2 | 800 | 861.7 | 7.71 |
| M2 | 724.6 | 761.5 | 5.1 | 170.8 | 217.4 | 27.3 | 950 | 1019.3 | 7.29 |
| M3 | 608.9 | 580.8 | 4.6 | 146.7 | 144.9 | 1.2 | 830 | 782.9 | 5.67 |
| Case | Lateral Resistance P1 (kN) | End Resistance P2 (kN) | Ultimate Pullout Capacity P (kN) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Numerical | Zeng [18] | Error (%) | Numerical | Zeng [18] | Error (%) | Numerical | Zeng [18] | Error (%) | |
| M1 | 575.5 | 587.9 | 2.15 | 176.5 | 54.8 | 68.95 | 800 | 642.7 | 19.67 |
| M2 | 724.6 | 705.4 | 2.64 | 170.8 | 54.8 | 67.92 | 950 | 760.2 | 19.97 |
| M3 | 608.9 | 587.9 | 3.45 | 146.7 | 54.8 | 62.65 | 830 | 642.7 | 22.57 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, X.; Wang, B.; Ma, L.; Xue, C.; Yu, Y. Upper-Bound Limit Analysis of Ultimate Pullout Capacity of Expanded Anchor Cable. Appl. Sci. 2023, 13, 2357. https://doi.org/10.3390/app13042357
Cheng X, Wang B, Ma L, Xue C, Yu Y. Upper-Bound Limit Analysis of Ultimate Pullout Capacity of Expanded Anchor Cable. Applied Sciences. 2023; 13(4):2357. https://doi.org/10.3390/app13042357
Chicago/Turabian StyleCheng, Xingyuan, Bo Wang, Longxiang Ma, Chenxi Xue, and Yunxiang Yu. 2023. "Upper-Bound Limit Analysis of Ultimate Pullout Capacity of Expanded Anchor Cable" Applied Sciences 13, no. 4: 2357. https://doi.org/10.3390/app13042357