
Fast Converging Gauss–Seidel Iterative Algorithm for Massive MIMO Systems
Abstract
:1. Introduction
1.1. Contributions
- An improved Gauss–Seidel iterative algorithm based on conjugate gradient and Jacobi (CJ) joint preprocessing is proposed, which can be described as the CJGS iterative method. The proposed algorithm attempts to combine CG and Jacobi iteration to accelerate the convergence of GS. Then the GS detector is employed to converge faster and iterate less.
- A well-chosen initialization technique can lower computing cost and increase algorithmic accuracy. The best appropriate initialization technique for the advised approach is chosen by contrasting the three initialization strategies.
- Software simulation and data analysis are utilized to provide more detailed examples of the suggested algorithm’s advantages in terms of complexity and performance. Simulation representations demonstrate that, independent of channel correlation, the CJGS iterative scheme surpasses both the enhanced GS-based iterative program and the conventional Gauss–Seidel repeated approach in terms of BER ability. Because of its reduced complexity, the MMSE detection ability may be attained with fewer iterations. As a result, the recommended strategy performs better in terms of complexity and detection effectiveness.
1.2. Paper Outline
1.3. Notation
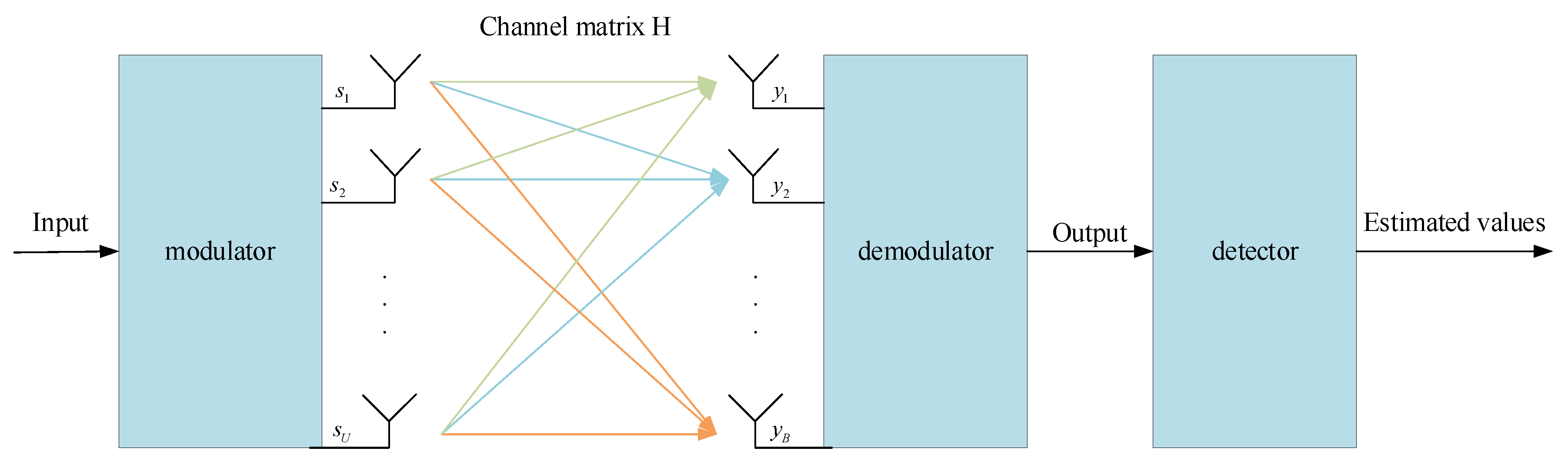
2. Massive MIMO System Model
2.1. Channel Model
- (1)
- and , the channel is independent and identically distributed.
- (2)
- and , the channel is user-side relevant.
- (3)
- and , the channel is base-station-side related.
- (4)
- and , the channel is fully correlated.
2.2. MMSE Detection
3. Proposed Algorithm
3.1. GS Iterative Estimation
- 2.
- Calculate the initial value .
- 3.
- GS iterative estimation. The signal-estimation formula of the GS iterative algorithm is [26]
3.2. Initialization
- In a given massive MIMO, the quantity of transmitting and receiving antennas is set. Thus, the initial solution is estimated by means of a linear transformation of the number estimating the initial solution, which can avoid matrix inversion operations and further limit computing power.
- 2.
- The diagonal elements of the matrix are dominant in massive MIMO communication. Therefore, the elements of matrix A can be grouped into diagonal elements that are not negligible and non-diagonal elements that are negligible, i.e., . The computational complexity of inverting the matrix could be decreased by replacing with .
3.3. CJ Joint Processing
| Algorithm 1 CJGS iterative algorithm |
| Input: y HB U |
| Initialization: |
| 1. |
| 2. |
| 3. |
| 4. |
| 5. |
| CJ joint processing: |
| 6. |
| 7. |
| 8. |
| 9. |
| GS iterative estimation: |
| For i = 2 do |
| 10. |
| End |
| Output: |
4. Simulation Results and Analysis
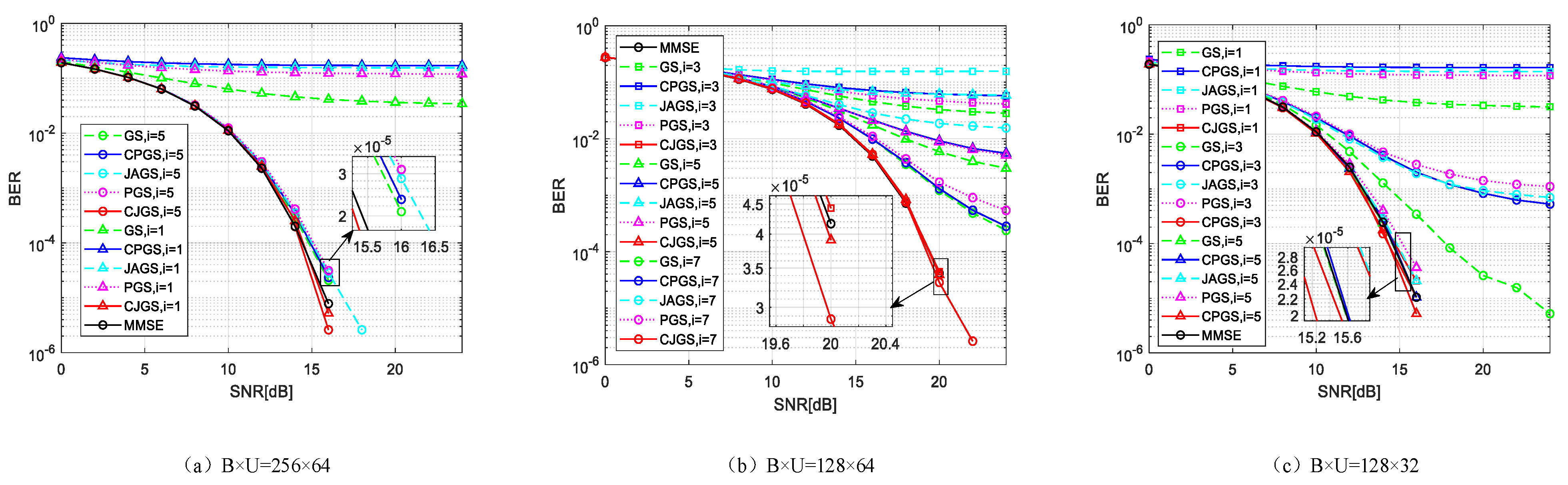
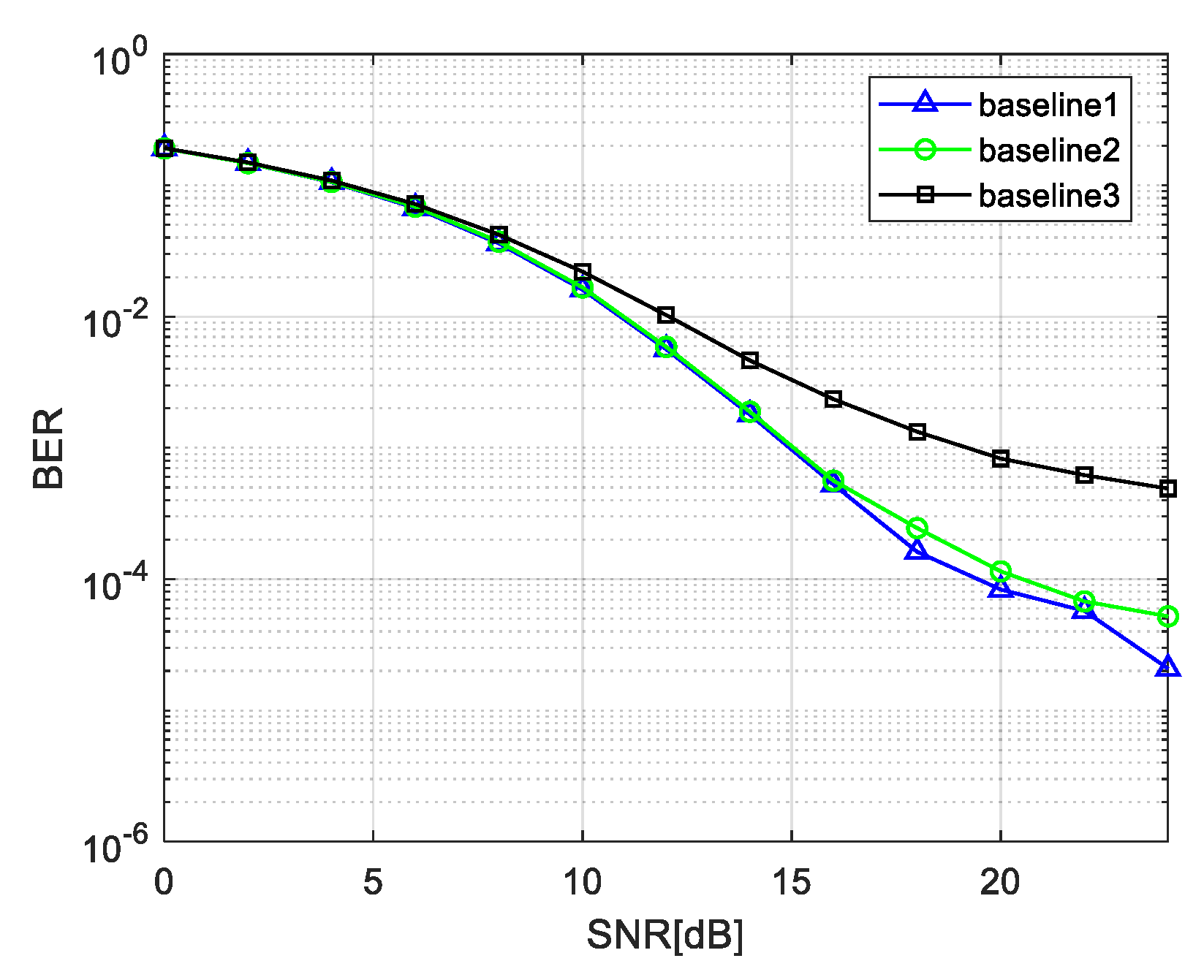
4.1. BER Performance
4.2. Complexity Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kumar, A.; Gupta, M. A review on activities of fifth generation mobile communication system. Alex. Eng. J. 2017, 57, 1125–1135. [Google Scholar] [CrossRef]
- Srinivas, P.; Miriyala, R.S.; Matsa, N.; Lakshmi Kantham, M.S.N.V.A.; Yallapu, S.; Ch, V.R. Capacity Evaluation of MIMO System:with and without Successive Interference Cancellation. In Proceedings of the 7th International Conference on Computing Methodologies and Communication (ICCMC), Erode, India, 23–25 February 2023; pp. 27–31. [Google Scholar] [CrossRef]
- Albreem, M.A.; Salah, W.; Kumar, A.; Alsharif, M.H.; Rambe, A.H.; Jusoh, M.; Uwaechia, A.N. Low Complexity Linear Detectors for Massive MIMO: A Comparative Study. IEEE Access 2021, 9, 45740–45753. [Google Scholar] [CrossRef]
- Wang, Y.N.; Xiao, Y.; Dan, L.L.; Chen, H. On the BER Performance of Constant Envelope OFDM in Frequency Selective MIMO Channels with ML Detection. IEEE Wirel. Commun. Lett. 2023, 12, 1354–1358. [Google Scholar] [CrossRef]
- Zhou, M.; Li, J.M.; Wan, A.; Yuan, J.; Yin, R.; Yang, L. Rate analysis of ZF receiver for uplink cell-free massive MIMO systems with D2D communications. Phys. Commun. 2023, 58, 102024. [Google Scholar] [CrossRef]
- Kalachikov, A.A.; Shelkunov, N.S. Performance Evaluation of the Detection Algorithms for MIMO Spatial Multiplexing Based on Analytical Wireless MIMO Channel Models. In Proceedings of the 2018 XIV International Scientific-Technical Conference on Actual Problems of Electronics Instrument Engineering (APEIE), Novosibirsk, Russia, 2–6 October 2018; pp. 180–183. [Google Scholar] [CrossRef]
- Deng, Q.; Liang, X.; Wang, X.; Huang, M.; Dong, C.; Zhang, Y. Fast Converging Iterative Precoding for Massive MIMO Systems: An Accelerated Weighted Neumann Series-Steepest Descent Approach. IEEE Access 2020, 8, 50244–50255. [Google Scholar] [CrossRef]
- Wei, Y.; Zhao, M.-M.; Hong, M.; Zhao, M.-J.; Lei, M. Learned Conjugate Gradient Descent Network for Massive MIMO Detection. IEEE Trans. Signal Process. 2020, 68, 6336–6349. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, Z.; Wang, X.; Lian, J.; Dai, X. A Low Complexity High Performance Weighted Neumann Series-based Massive MIMO Detection. In Proceedings of the 28th Wireless and Optical Communications Conference (WOCC), Beijing, China, 9–10 May 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Lee, Y. Decision-aided Jacobi iteration for signal detection in massive MIMO systems. Electron. Lett. 2017, 53, 1552–1554. [Google Scholar] [CrossRef]
- Yaohua, X.; Jian, W. Signal Detection Algorithm Based on SOR Algorithm in Massive MIMO System. In Proceedings of the 14th IEEE International Conference on Signal Processing (ICSP), Beijing, China, 12–16 August 2018; pp. 662–667. [Google Scholar] [CrossRef]
- Gao, X.; Dai, L.; Yuen, C.; Zhang, Y. Low-Complexity MMSE Signal Detection Based on Richardson Method for Large-Scale MIMO Systems. In Proceedings of the 2014 IEEE 80th Vehicular Technology Conference (VTC2014-Fall), Vancouver, BC, Canada, 14–17 September 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Shahabuddin, S.; Hautala, I.; Juntti, M.; Studer, C. ADMM-Based Infinity-Norm Detection for Massive MIMO: Algorithm and VLSI Architecture. IEEE Trans. Very Large Scale Integr. Syst. 2021, 29, 747–759. [Google Scholar] [CrossRef]
- Park, S. Kalman Combining Based Iterative Detection and Decoding for MIMO Systems With Hybrid ARQ. IEEE Trans. Veh. Technol. 2022, 72, 2040–2050. [Google Scholar] [CrossRef]
- Dong, Y.Y.; Zhang, Z.Y.; Liang, C.; Yin, X.; Wang, X.; Zou, R.; Dai, X. A Low-Complexity Precoding Method Based on the Steepest Descent Algorithm for Downlink Massive MIMO Systems. In Proceedings of the 2018 IEEE/CIC International Conference on Communications in China (ICCC), Beijing, China, 16–18 August 2018; pp. 17–21. [Google Scholar] [CrossRef]
- Kumar, A.; Gour, N.; Sharma, H.; Shorfuzzaman, M.; Masud, M. Hybrid detection techniques for 5G and B5G M-MIMO system. Alex. Eng. J. 2023, 75, 429–437. [Google Scholar] [CrossRef]
- Chang, M.X.; Su, S.L. Complexity-reduced maximum-likelihood hybrid detection for MIMO systems. IET Commun. 2023, 17, 829–841. [Google Scholar] [CrossRef]
- Albreem, M.A.M.; El-Saleh, A.A.; Juntti, M. Linear Massive MIMO Uplink Detector Based on Joint Jacobi and Gauss-Seidel Methods. In Proceedings of the 2020 16th International Conference on the Design of Reliable Communication Networks (DRCN), Milan, Italy, 25–27 March 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Wu, Z.; Ge, L.; You, X.; Zhang, C. Efficient near-MMSE detector for large-scale MIMO systems. In Proceedings of the 2017 IEEE International Workshop on Signal Processing Systems (SiPS), Lorient, France, 3–5 October 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Ahmad, M.; Zhang, X.; Khoso, I.A.; Shi, X.; Qian, Y. High-Precision Iterative Preconditioned Gauss–Seidel Detection Algorithm for Massive MIMO Systems. Electronics 2022, 11, 3806. [Google Scholar] [CrossRef]
- Shahabuddin, S.; Juntti, M.; Studer, C. ADMM-based infinity norm detection for large MU-MIMO: Algorithm and VLSI architecture. In Proceedings of the 2017 IEEE International Symposium on Circuits and Systems (ISCAS), Baltimore, MD, USA, 28–31 May 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Khoso, I.A.; Zhang, X.; Shaikh, A.H.; Sahito, F.; Dayo, Z.A. Improved Gauss–Seidel detector for large-scale MIMO systems. IET Commun. 2022, 16, 291–302. [Google Scholar] [CrossRef]
- Zhou, J.; Hu, J.; Chen, J.; He, S. Biased MMSE soft-output detection based on conjugate gradient in massive MIMO. In Proceedings of the IEEE 11th International Conference on ASIC (ASICON), Chengdu, China, 3–6 November 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Chataut, R.; Akl, R.; Dey, U.K. Massive MIMO Uplink Signal Detector for 5G and Beyond Networks. In Proceedings of the IEEE Texas Symposium on Wireless and Microwave Circuits and Systems (WMCS), Waco, TX, USA, 19–20 April 2022; pp. 1–7. [Google Scholar] [CrossRef]
- Mi, S.; Zhang, J.; Fan, F.; Yan, B.; Wang, M. Low complexity detection algorithms based on ADMIN for massive MIMO. China Commun. 2023, 20, 67–77. [Google Scholar] [CrossRef]
- Chinnusami, M.; Ravikumar, C.; Priya, S.B.M.; Arumainayagam, A.; Pau, G.; Anbazhagan, R.; Varma, P.S.; Sathish, K. Low Complexity Signal Detection for Massive MIMO in B5G Uplink System. IEEE Access 2023, 11, 91051–91059. [Google Scholar] [CrossRef]
- Chataut, R.; Akl, R.; Dey, U.K.; Robaei, M. SSOR Preconditioned Gauss-Seidel Detection and Its Hardware Architecture for 5G and beyond Massive MIMO Networks. Electronics 2021, 10, 578. [Google Scholar] [CrossRef]
- Yasmin, H.; Aljahdaly, N.H.; Saeed, A.M.; Shah, R. Probing Families of Optical Soliton Solutions in Fractional Perturbed Radhakrishnan–Kundu–Lakshmanan Model with Improved Versions of Extended Direct Algebraic Method. Fractal Fract. 2023, 7, 512. [Google Scholar] [CrossRef]
- Yasmin, H.; Aljahdaly, N.H.; Saeed, A.M.; Shah, R. Investigating Families of Soliton Solutions for the Complex Structured Coupled Fractional Biswas–Arshed Model in Birefringent Fibers Using a Novel Analytical Technique. Fractal Fract. 2023, 7, 491. [Google Scholar] [CrossRef]
- Wang, Z.; Xu, W.; Xia, Y.; Shi, Q.; Huang, Y. A New Randomized Iterative Detection Algorithm for Uplink Large-scale MIMO Systems. IEEE Trans. Commun. 2023, 71, 5093–5107. [Google Scholar] [CrossRef]
- Alshammari, S.; Al-Sawalha, M.M.; Shah, R. Approximate Analytical Methods for a Fractional-Order Nonlinear System of Jaulent–Miodek Equation with Energy-Dependent Schrödinger Potential. Fractal Fract. 2023, 7, 140. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, D.; Chen, L.; Liang, H. Fast Converging Gauss–Seidel Iterative Algorithm for Massive MIMO Systems. Appl. Sci. 2023, 13, 12638. https://doi.org/10.3390/app132312638
Shen D, Chen L, Liang H. Fast Converging Gauss–Seidel Iterative Algorithm for Massive MIMO Systems. Applied Sciences. 2023; 13(23):12638. https://doi.org/10.3390/app132312638
Chicago/Turabian StyleShen, Dong, Li Chen, and Hao Liang. 2023. "Fast Converging Gauss–Seidel Iterative Algorithm for Massive MIMO Systems" Applied Sciences 13, no. 23: 12638. https://doi.org/10.3390/app132312638