
Development and Validation of a System for Game Control Based on a Force Plate



Abstract
:1. Introduction
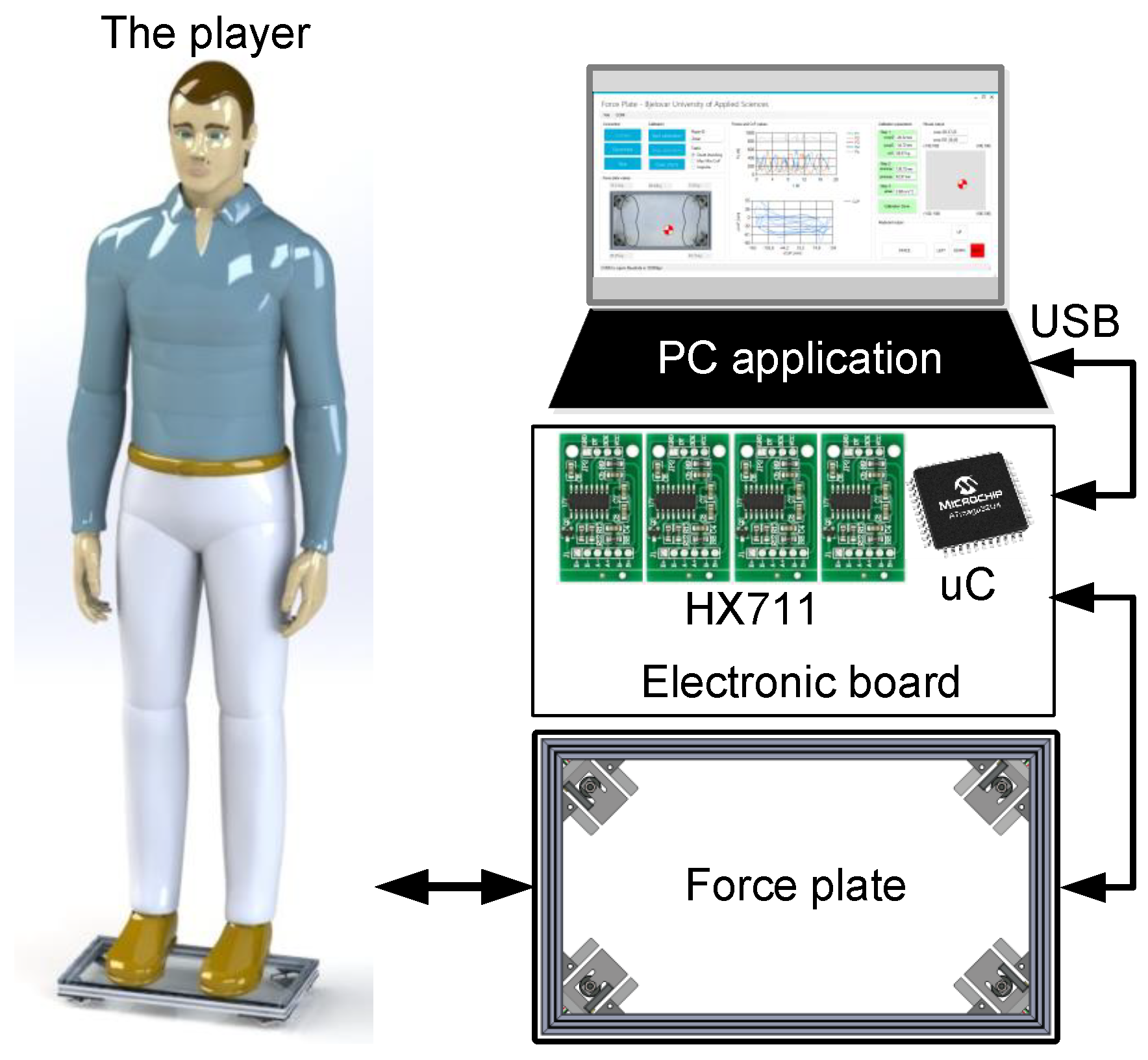
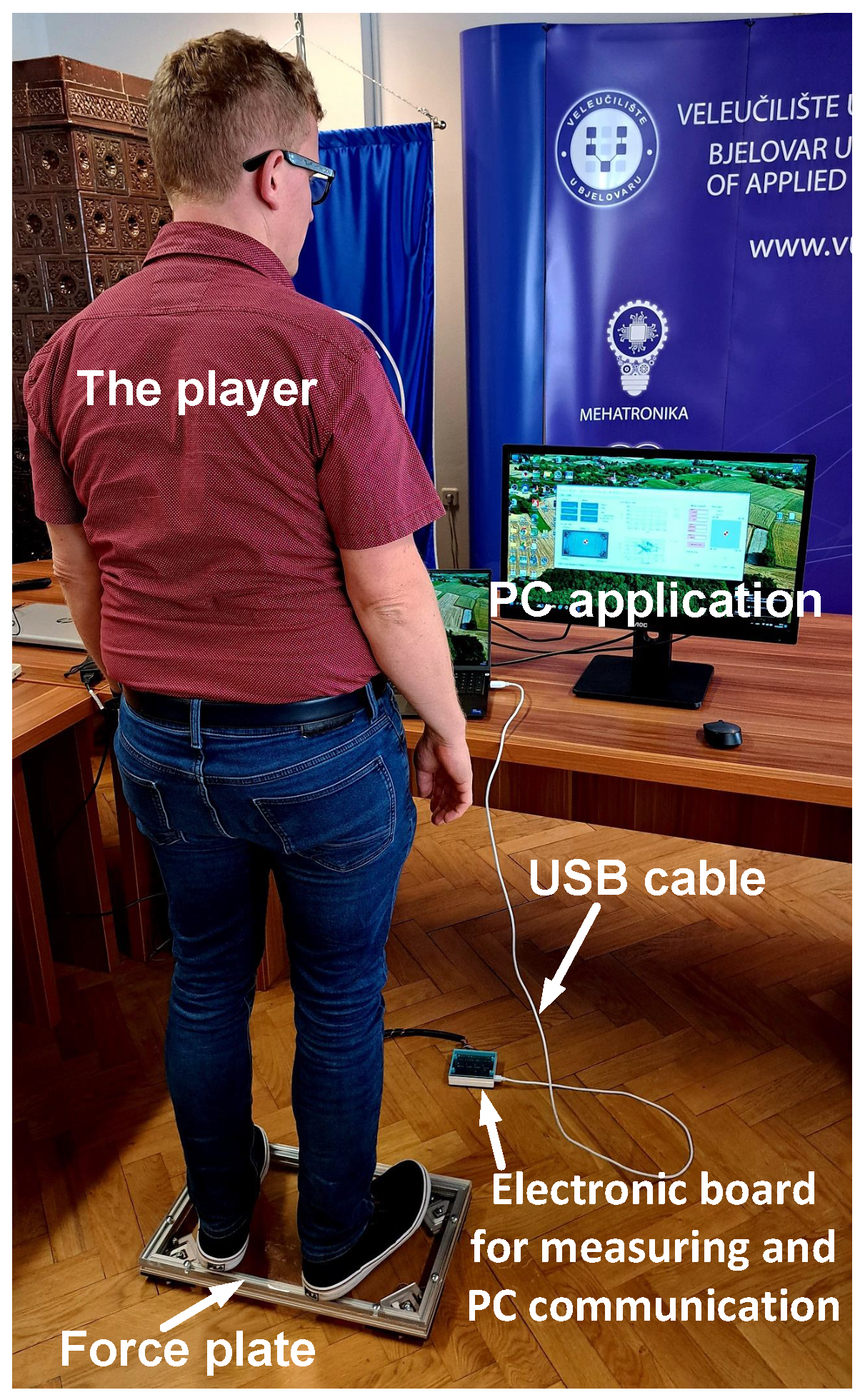
2. System Description
3. Mathematical Model of the System
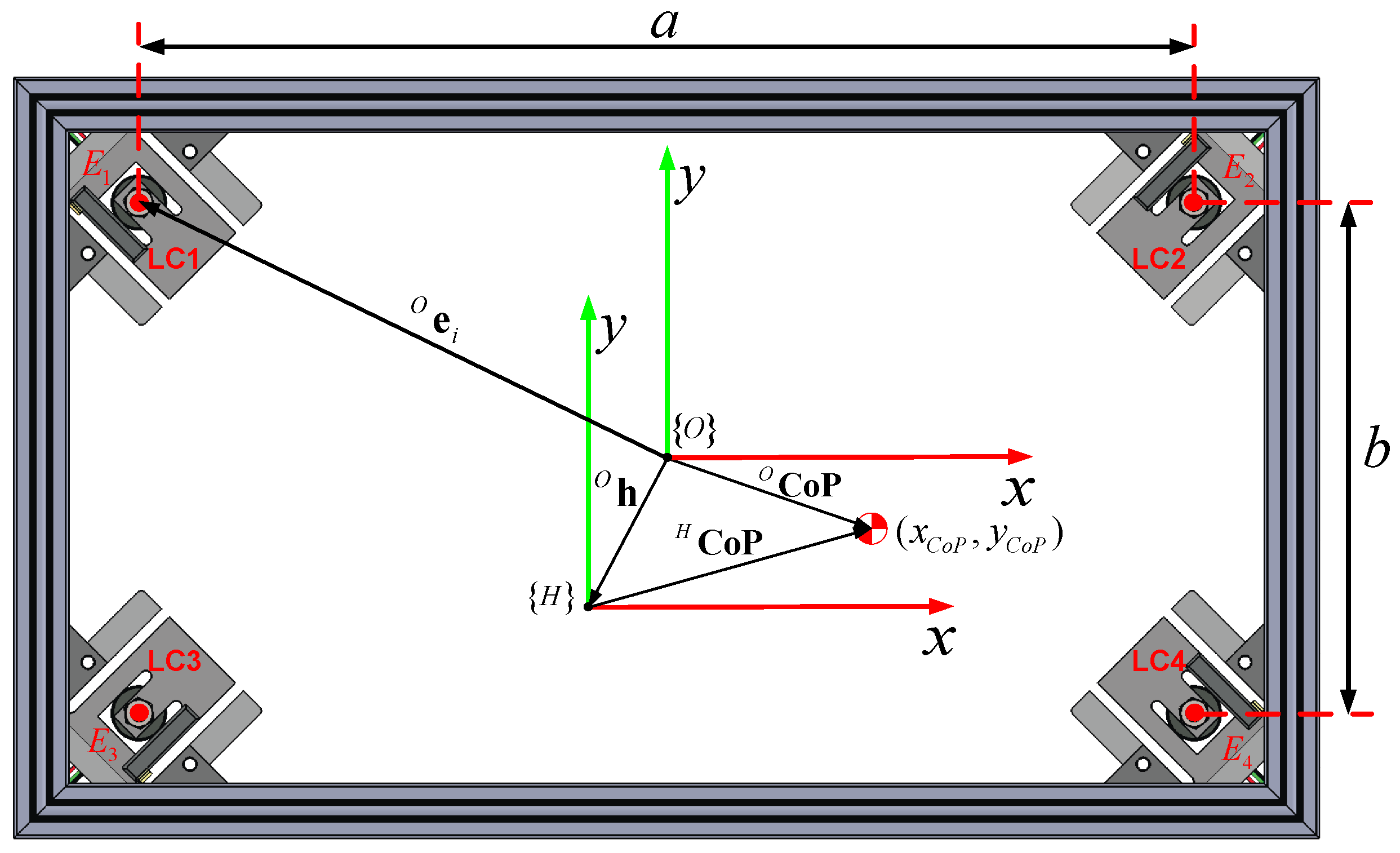
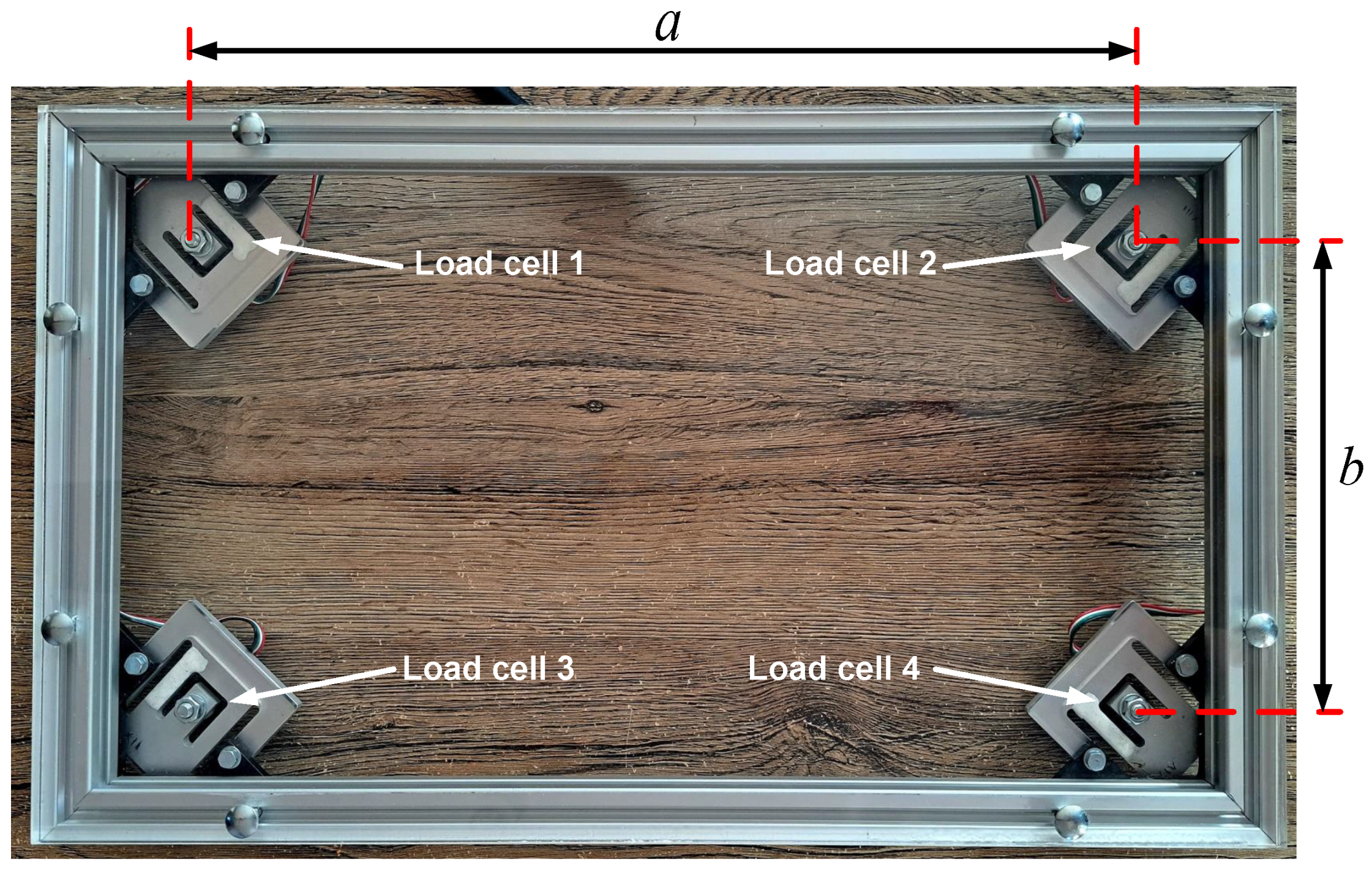
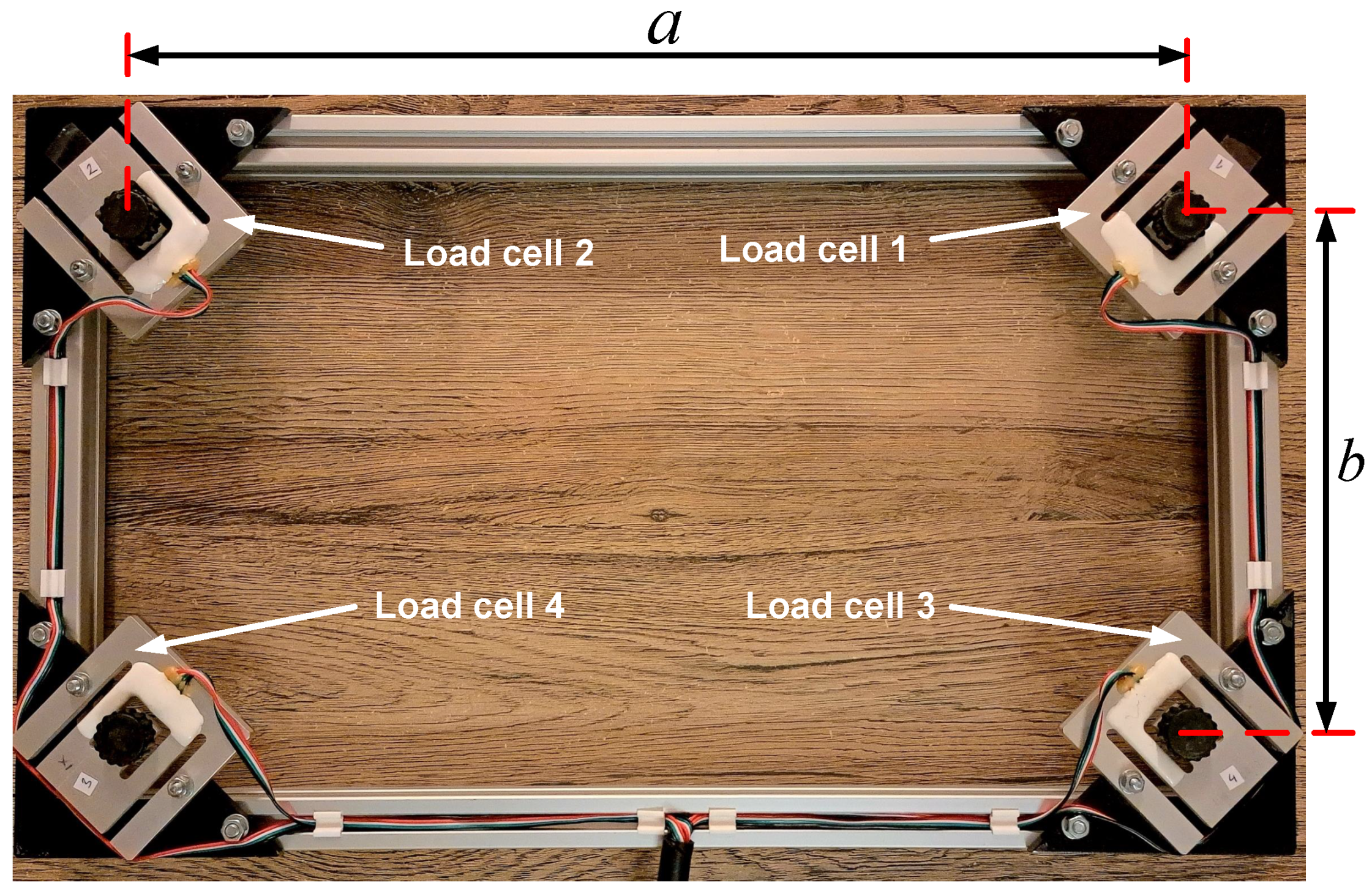
3.1. Force Plate
- a: the distance between the load cells along the x axis;
- b: the distance between the load cells along the y axis;
- : the position vector of a local frame {H} in the global frame {O};
- : the position vector of the ith load cell in the global frame {O};
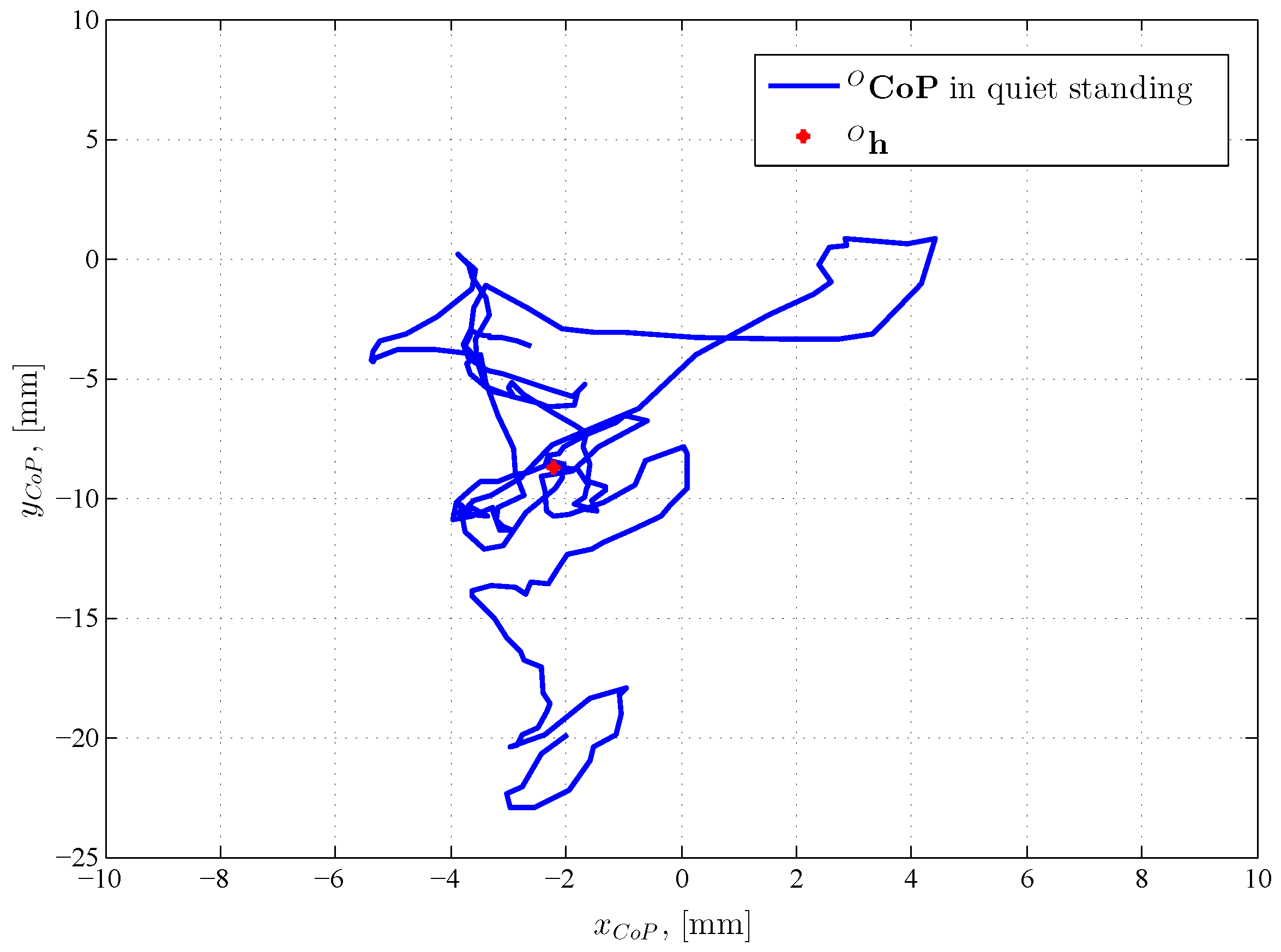
- : the position vector of the player’s CoP in the global frame {O};
- : the position vector of the player’s CoP in the global frame {H}.
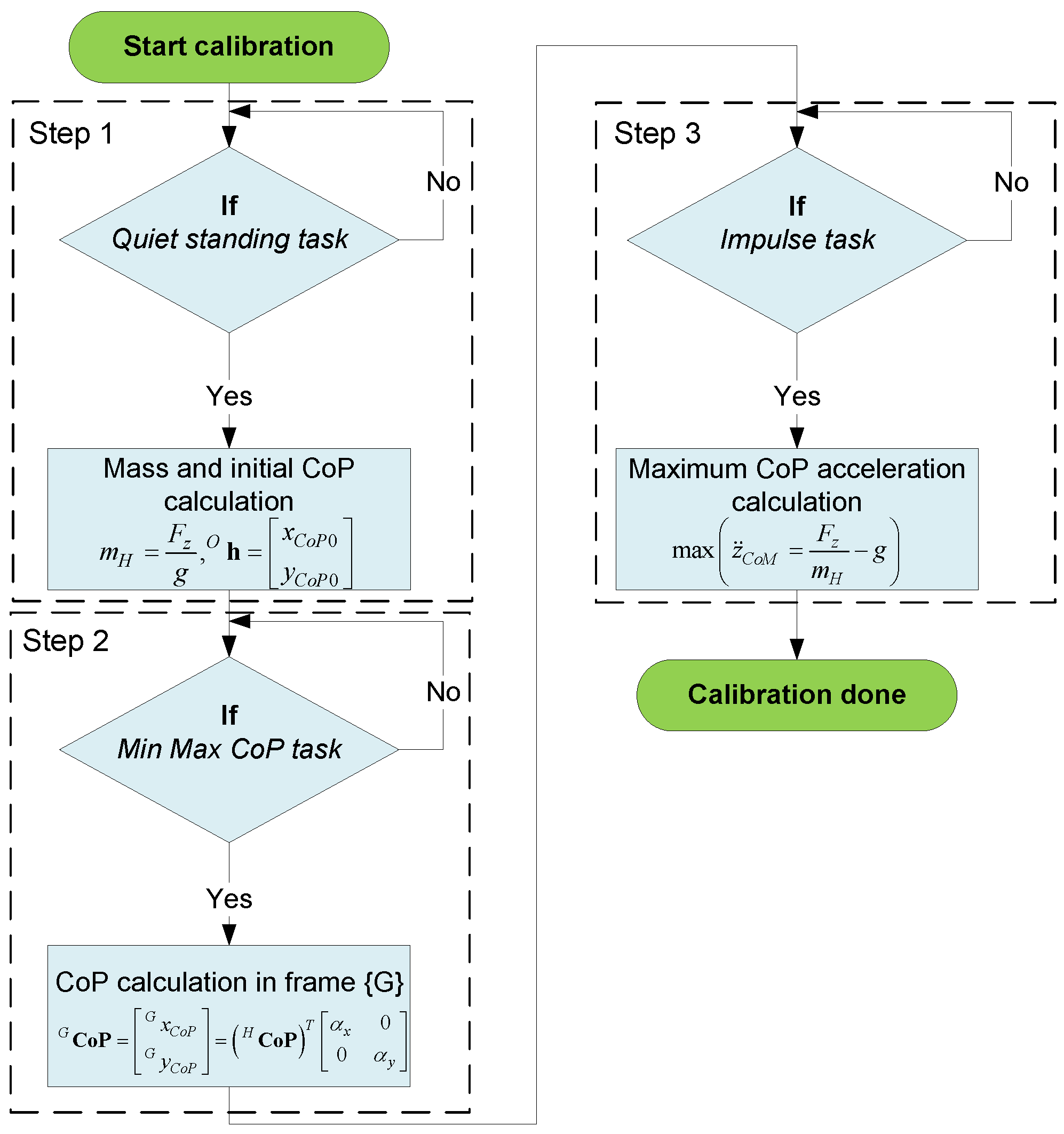
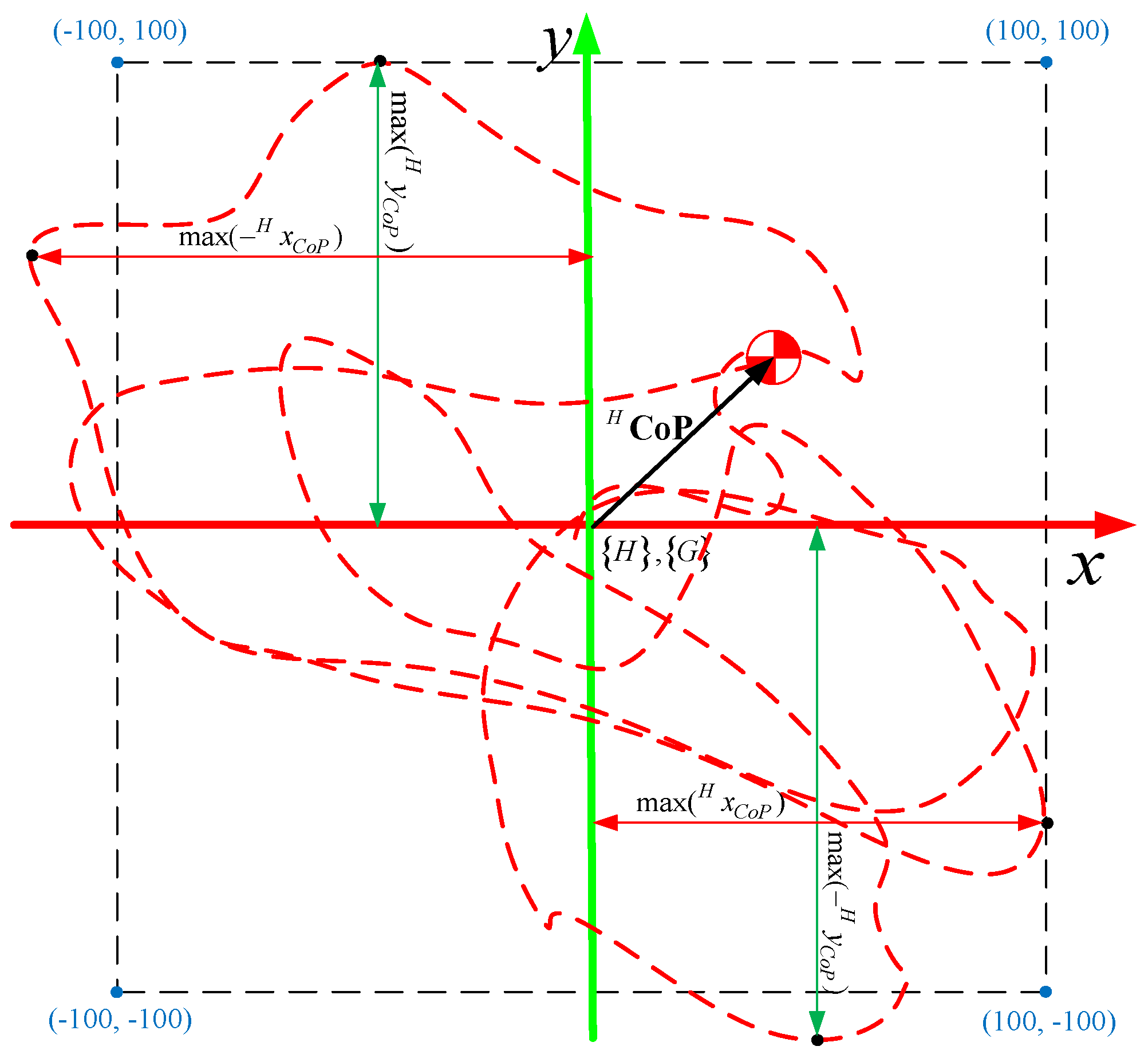
3.2. System Calibration and Game Control
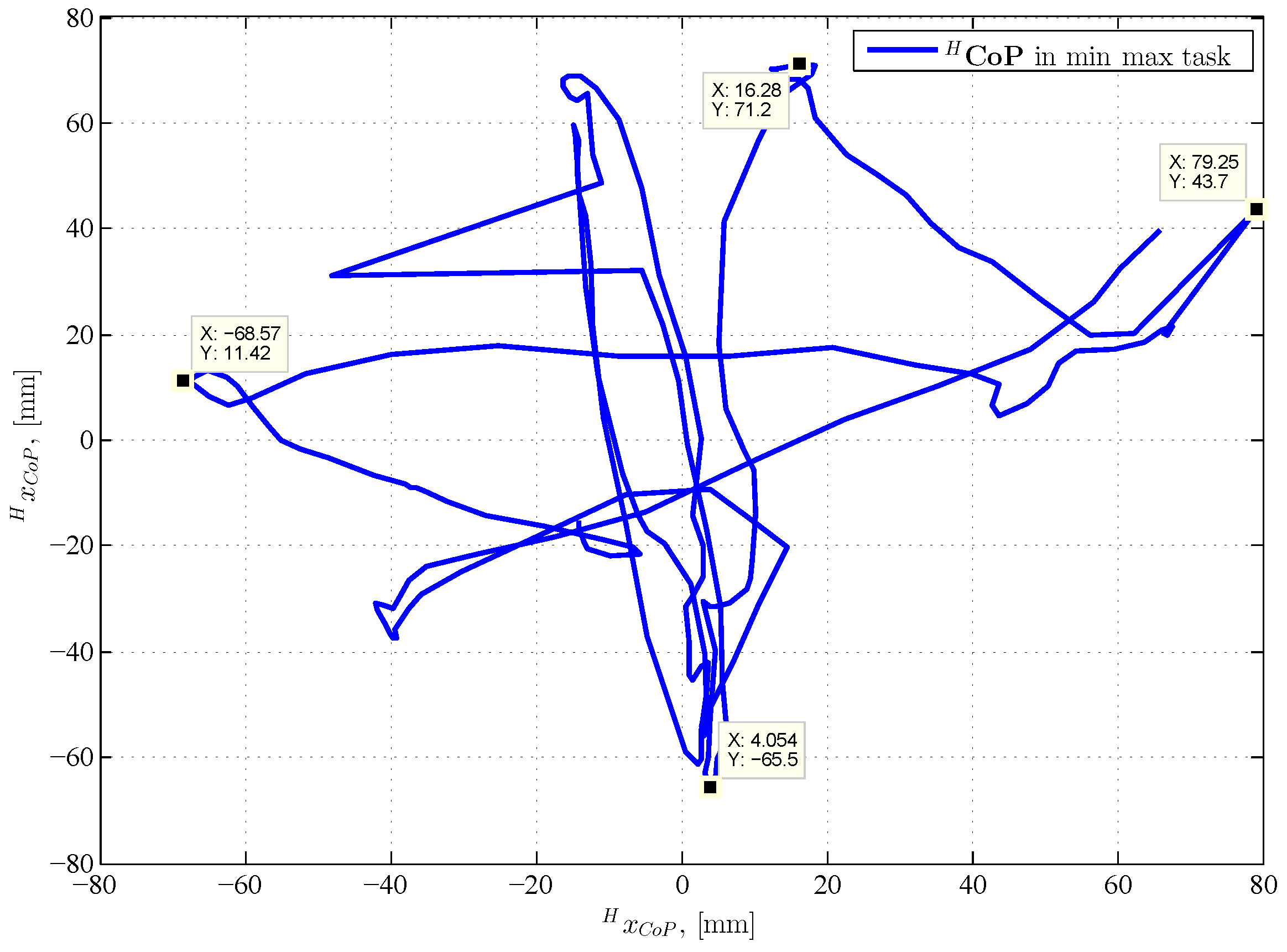
- : the maximum distance of the player’s CoP position from the origin along the positive x axis;
- : the maximum distance of the player’s CoP position from the origin along the negative x axis;
- : the maximum distance of the player’s CoP position from the origin along the positive y axis;
- : the maximum distance of the player’s CoP position from the origin along the negative y axis.

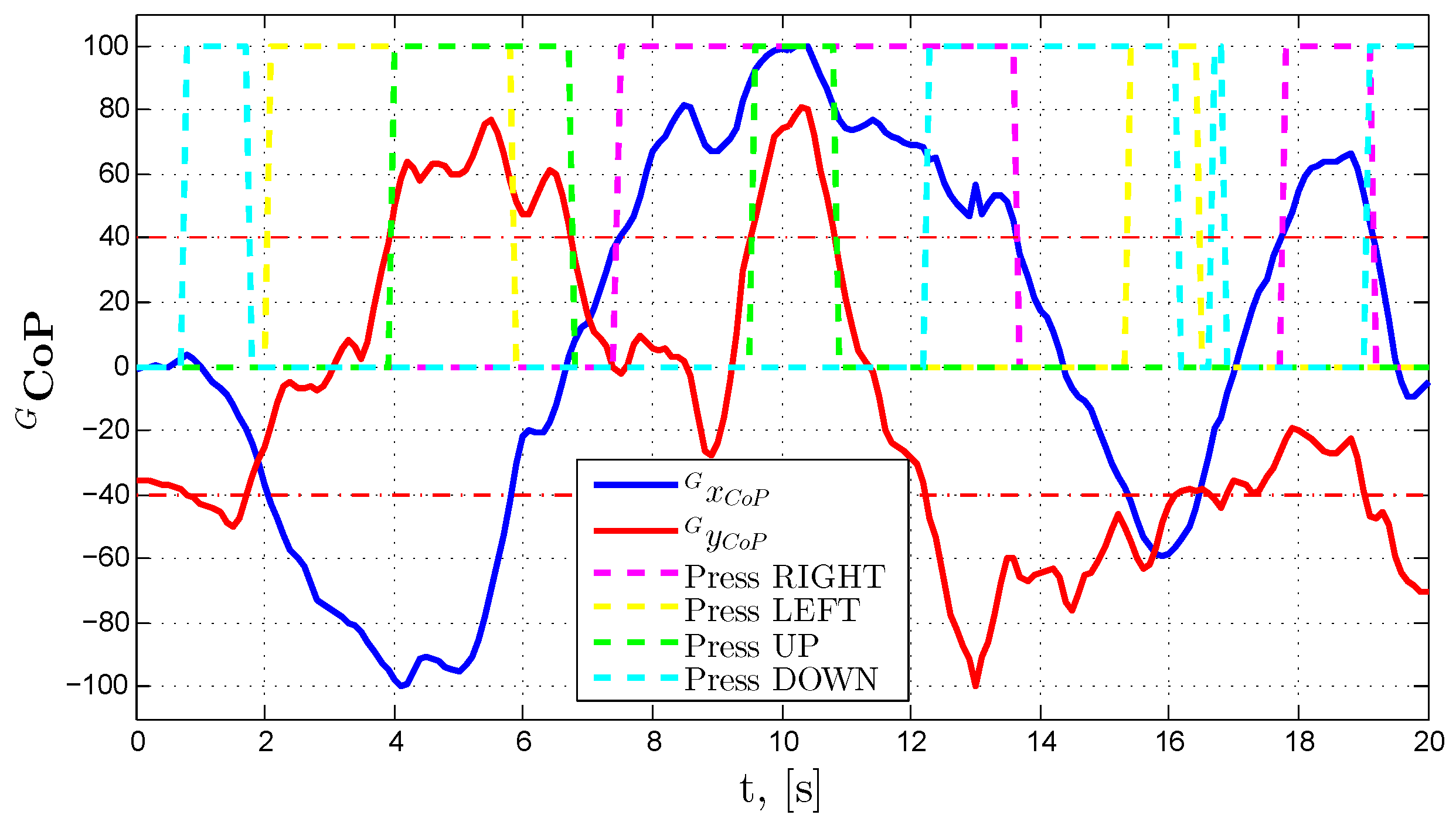
- is the player’s CoP position in the local frame {G} along the x axis in the [−100, 100] range;
- is the player’s CoP position in the local frame {G} along the y axis in the [−100, 100] range;
- is the factor of the player’s CoP position transformation along the x axis from the local frame {H} into the [−100, 100] range of the local frame {G};
- is the factor of the player’s CoP position transformation along the y axis from the local frame {H} into the [−100, 100] range of the local frame {G}.
- : the threshold for pressing the UP and DOWN keys;
- : the threshold for pressing the RIGHT and LEFT keys;
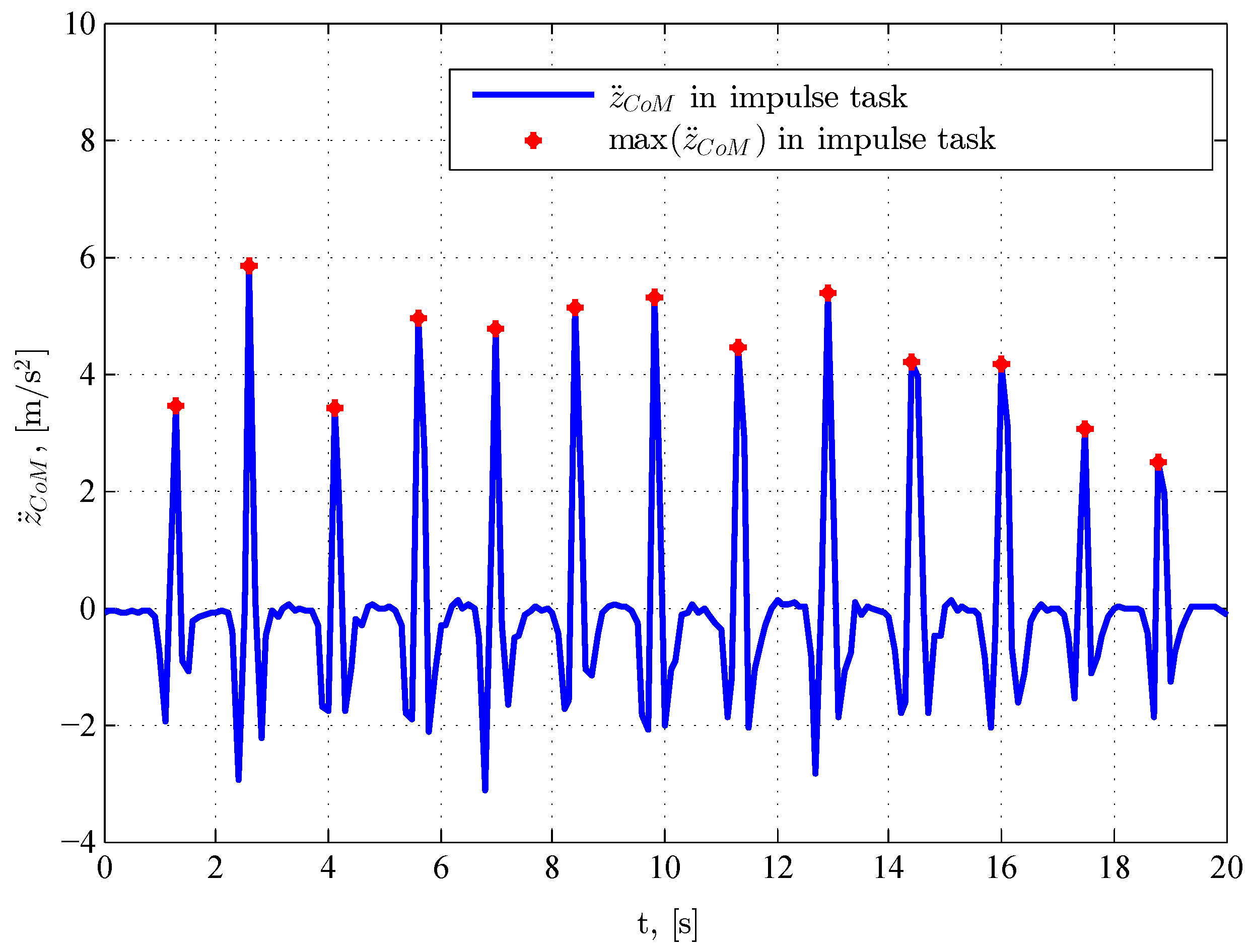
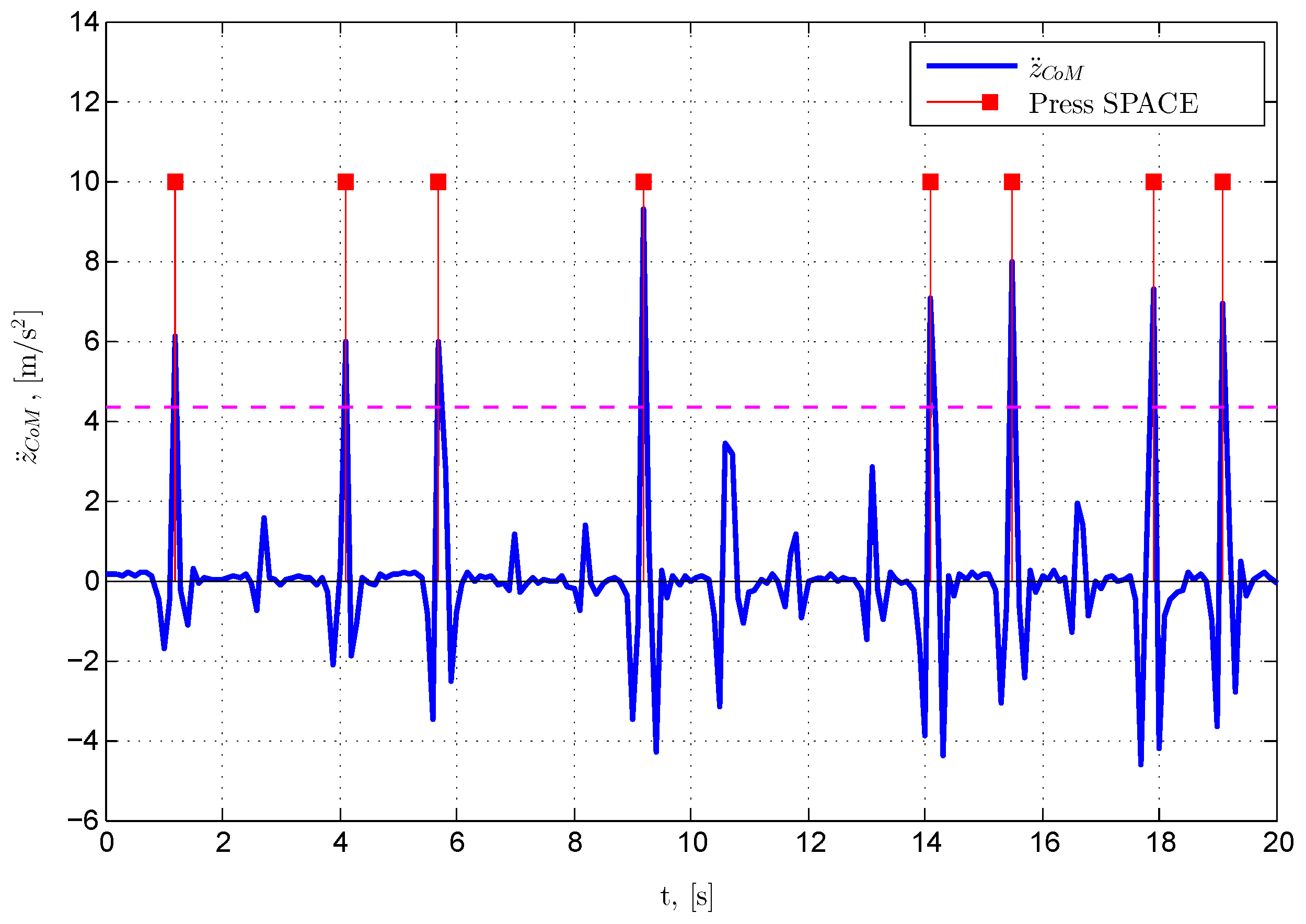
- : the threshold for pressing the SPACE key.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Condition for Pressing a Key | True Condition | False Condition |
|---|---|---|
| if () | Press UP | Release UP |
| if () | Press DOWN | Release DOWN |
| if () | Press RIGHT | Release RIGHT |
| if () | Press LEFT | Release LEFT |
| if () | Press LEFT | Release LEFT |
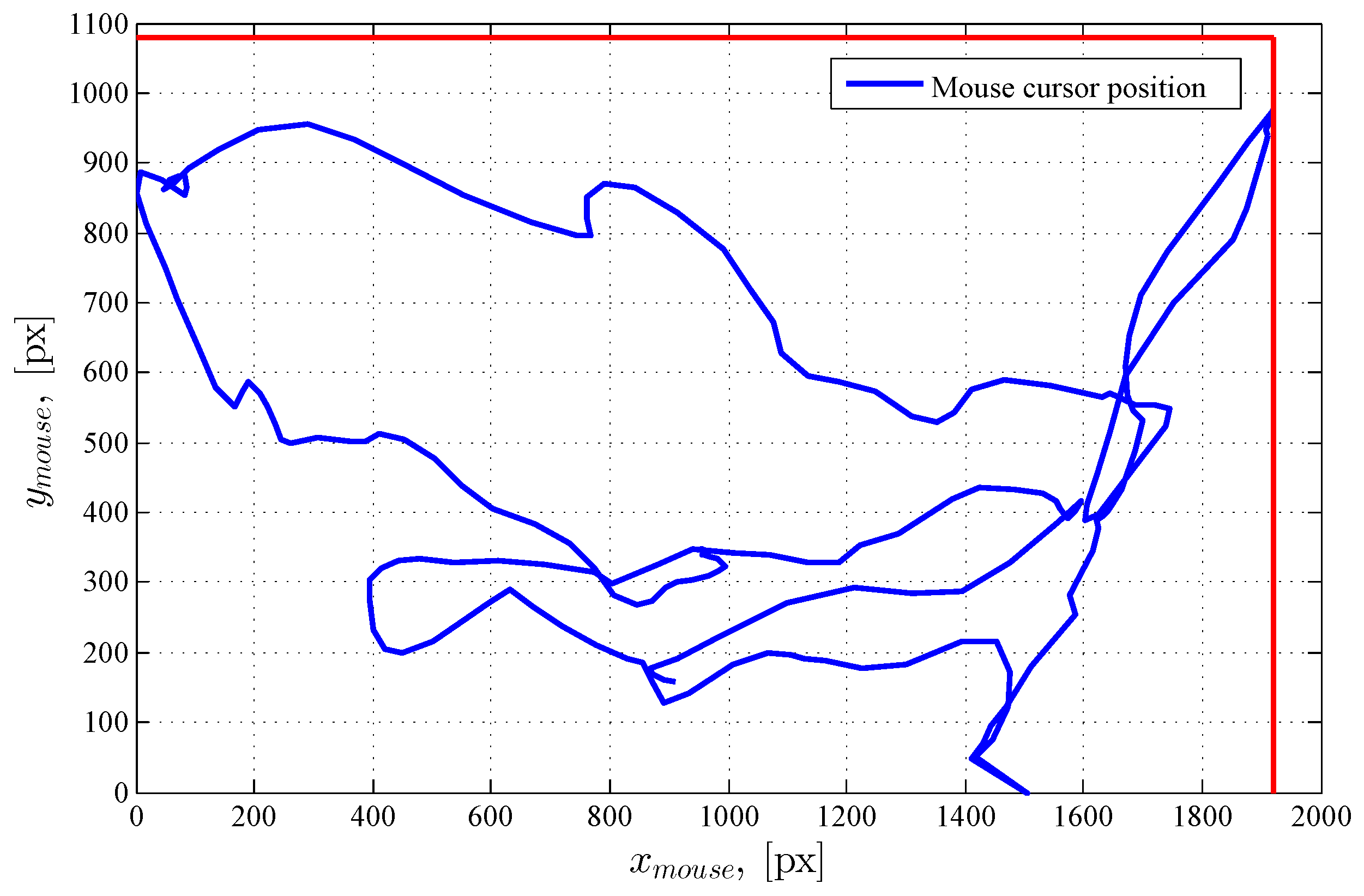
- is the mouse cursor position along the x axis;
- is the mouse cursor position along the y axis;
- is the horizontal screen resolution;
- is the vertical screen resolution.
4. Mechatronic System Design
4.1. Mechanical Design
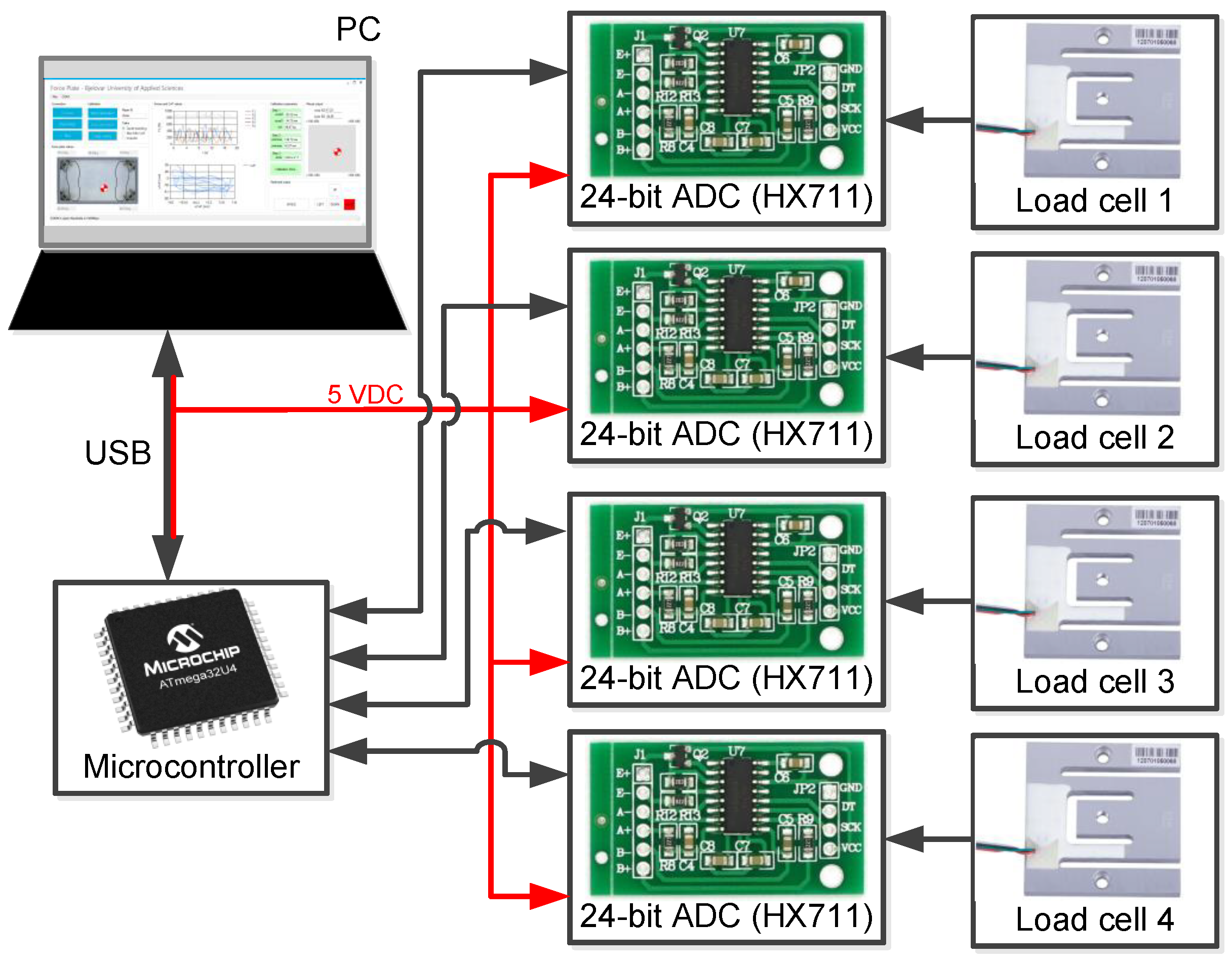
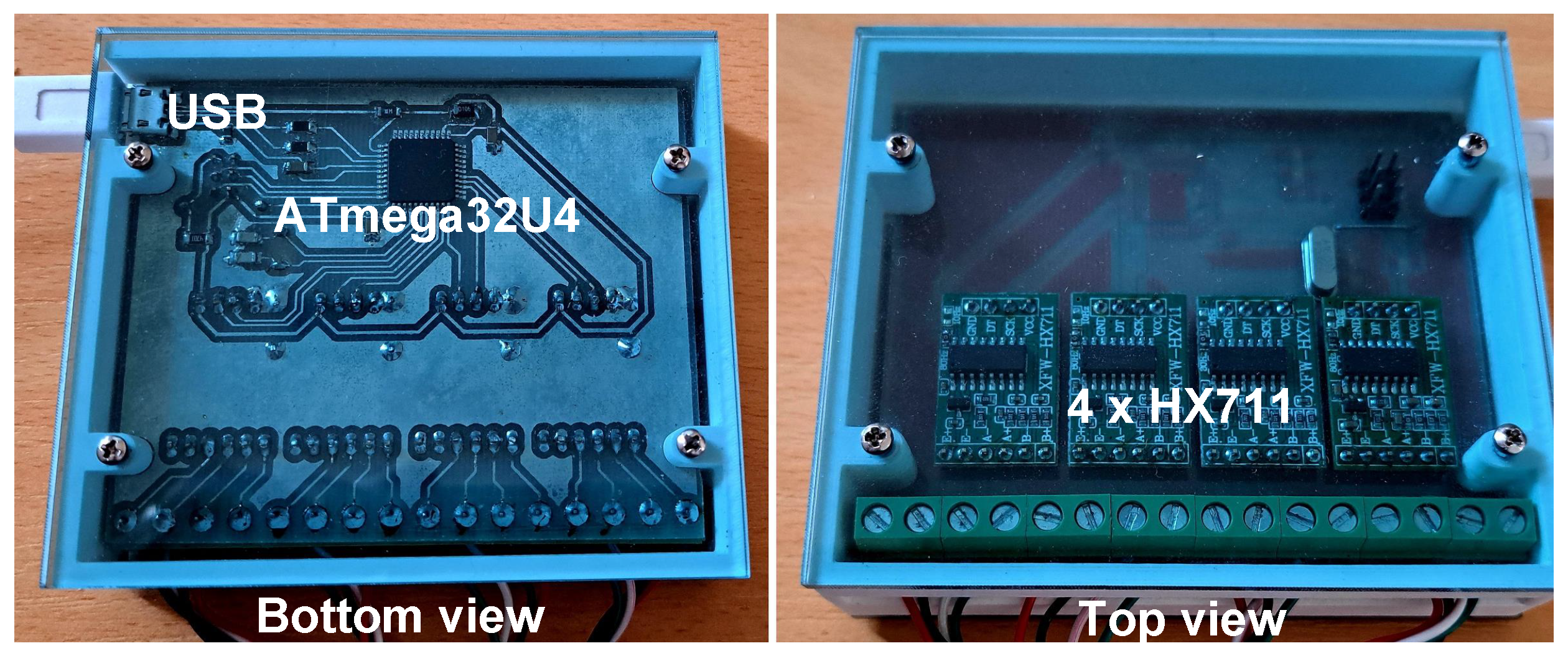
4.2. Electronic Design
- is the calibration coefficient of the ith load cell;
- is the conversion value of the HX711 AD converter, which is connected to the ith load cell;
- is the value of the force measured by the unladen ith load cell.
4.3. Software Design
4.3.1. Firmware for ATmega32U4 Microcontroller
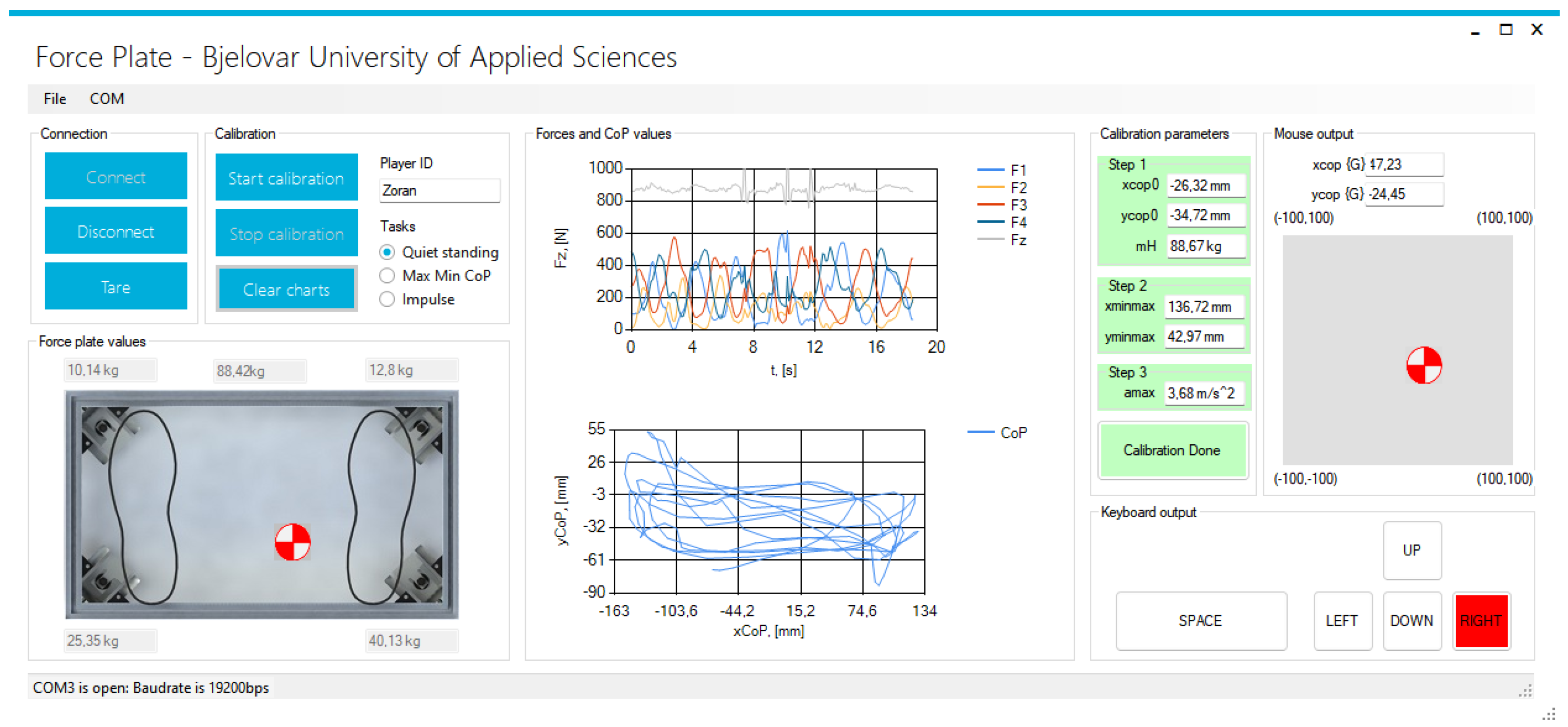
4.3.2. PC Application for Data Acquisition, System Calibration, and Game Control
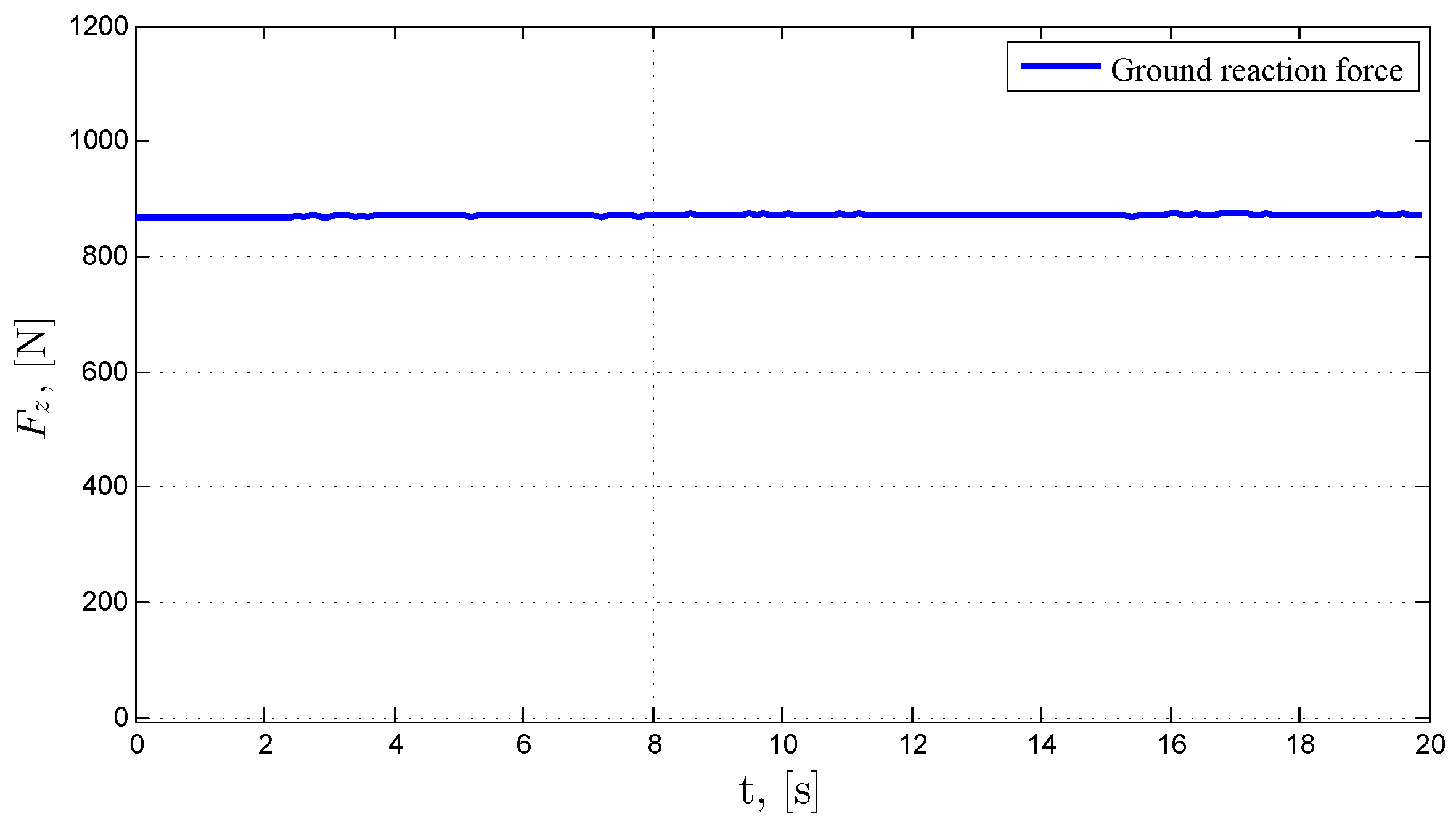
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CAD | Computer-aided design |
| CoM | Center of mass |
| CoP | Center of pressure |
| PC | Personal computer |
| USB | Universal serial bus |
References
- Palmieri, R.M.; Ingersoll, C.D.; Stone, M.B.; Krause, B.A. Center-of-pressure parameters used in the assessment of postural control. J. Sport Rehabil. 2002, 11, 51–66. [Google Scholar] [CrossRef]
- Riemann, B.L.; Guskiewicz, K.M.; Shields, E.W. Relationship between clinical and forceplate measures of postural stability. J. Sport Rehabil. 1999, 8, 71–82. [Google Scholar] [CrossRef]
- Quijoux, F.; Nicolaï, A.; Chairi, I.; Bargiotas, I.; Ricard, D.; Yelnik, A.; Oudre, L.; Bertin-Hugault, F.; Vidal, P.P.; Vayatis, N.; et al. A review of center of pressure (COP) variables to quantify standing balance in elderly people: Algorithms and open-access code. Physiol. Rep. 2021, 9, e15067. [Google Scholar] [CrossRef] [PubMed]
- Ruhe, A.; Fejer, R.; Walker, B. Center of pressure excursion as a measure of balance performance in patients with non-specific low back pain compared to healthy controls: A systematic review of the literature. Eur. Spine J. 2011, 20, 358–368. [Google Scholar] [CrossRef] [PubMed]
- Leach, J.M.; Mancini, M.; Peterka, R.J.; Hayes, T.L.; Horak, F.B. Validating and calibrating the Nintendo Wii balance board to derive reliable center of pressure measures. Sensors 2014, 14, 18244–18267. [Google Scholar] [CrossRef] [PubMed]
- Huang, C.W.; Sue, P.D.; Abbod, M.; Jiang, B.; Shieh, J.S. Measuring Center of Pressure Signals to Quantify Human Balance Using Multivariate Multiscale Entropy by Designing a Force Platform. Sensors 2013, 13, 10151–10166. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Y. Design and Validation of a Low-Cost Portable Device to Quantify Postural Stability. Sensors 2017, 17, 619. [Google Scholar] [CrossRef] [PubMed]
- Vrhovski, Z.; Obrovac, K.; Nižetić, J.; Mutka, A.; Klobučar, H.; Bogdan, S. System for Evaluation and Compensation of Leg Length Discrepancy for Human Body Balancing. Appl. Sci. 2019, 9, 2504. [Google Scholar] [CrossRef]
- Eguchi, R.; Takahashi, M. Validity of the Nintendo Wii Balance Board for kinetic gait analysis. Appl. Sci. 2018, 8, 285. [Google Scholar] [CrossRef]
- Lange, B.; Flynn, S.; Chang, C.; Ahmed, A.; Geng, Y.; Utsav, K.; Xu, M.; Seok, D.; Cheng, S.; Rizzo, A. Development of an interactive rehabilitation game using the Nintendo WiiFit Balance Board for people with neurological injury. Top. Stroke Rehabil. 2010, 15, 345–352. [Google Scholar] [CrossRef] [PubMed]
- Baranyi, R.; Willinger, R.; Lederer, N.; Grechenig, T.; Schramm, W. Chances for serious games in rehabilitation of stroke patients on the example of utilizing the Wii Fit Balance Board. In Proceedings of the 2013 IEEE 2nd International Conference on Serious Games and Applications for Health (SeGAH), Vilamoura, Portugal, 2–3 May 2013; pp. 1–7. [Google Scholar] [CrossRef]
- Taylor, M.J.; McCormick, D.; Shawis, T.; Impson, R.; Griffin, M. Activity-promoting gaming systems in exercise and rehabilitation. J. Rehabil. Res. Dev. 2011, 48, 1171. [Google Scholar] [CrossRef] [PubMed]
- Ravenek, K.E.; Wolfe, D.L.; Hitzig, S.L. A scoping review of video gaming in rehabilitation. Disabil. Rehabil. Assist. Technol. 2016, 11, 445–453. [Google Scholar] [CrossRef] [PubMed]
- Park, D.S.; Lee, G. Validity and reliability of balance assessment software using the Nintendo Wii balance board: Usability and validation. J. Neuroeng. Rehabil. 2014, 11, 99. [Google Scholar] [CrossRef] [PubMed]
- Dos Santos, D.A.; Fukuchi, C.A.; Fukuchi, R.K.; Duarte, M. A data set with kinematic and ground reaction forces of human balance. PeerJ 2017, 5, e3626. [Google Scholar] [CrossRef]
- Lafond, D.; Duarte, M.; Prince, F. Comparison of three methods to estimate the center of mass during balance assessment. J. Biomech. 2004, 37, 1421–1426. [Google Scholar] [CrossRef] [PubMed]
- Cotton, S.; Vanoncini, M.; Fraisse, P.; Ramdani, N.; Demircan, E.; Murray, A.; Keller, T. Estimation of the centre of mass from motion capture and force plate recordings: A study on the elderly. Appl. Bionics Biomech. 2011, 8, 67–84. [Google Scholar] [CrossRef]
- Popovic, M.B. (Ed.) Copyright; Academic Press: Cambridge, MA, USA, 2019; p. iv. [Google Scholar] [CrossRef]
- Linthorne, N.P. Analysis of standing vertical jumps using a force platform. Am. J. Phys. 2001, 69, 1198–1204. [Google Scholar] [CrossRef]
- Lake, J.; Mundy, P.; Comfort, P.; McMahon, J.J.; Suchomel, T.J.; Carden, P. Concurrent Validity of a Portable Force Plate Using Vertical Jump Force–Time Characteristics. J. Appl. Biomech. 2018, 34, 410–413. [Google Scholar] [CrossRef] [PubMed]
- Muller, I.; de Brito, R.M.; Pereira, C.E.; Brusamarello, V. Load cells in force sensing analysis-theory and a novel application. IEEE Instrum. Meas. Mag. 2010, 13, 15–19. [Google Scholar] [CrossRef]
- Vrhovski, Z. Sustav za Procjenu i Kompenzaciju Razlike Duljina Nogu Radi Postavljanja Ljudskog Tijela u Ravnotežu. Ph.D. Thesis, University of Zagreb, Faculty of Electrical Engineering and Computing, Zagreb, Croatia, 2019. [Google Scholar]
- Benkek, G.; Vrhovski, Z.; Husak, K. Didaktičko učilo za kalibraciju senzora mase pomoću računala. Politeh. Dizajn. 2022, 10, 285793. [Google Scholar]
- Validation of a System for Game Control Based on Force Plate. Available online: https://www.youtube.com/watch?v=PMfpMvEPB-Y (accessed on 23 September 2023).
















| Condition for Clicking a Button | True Condition | False Condition |
|---|---|---|
| if () | Press Left Mouse Button | Release Left Mouse Button |
| Load Cell i | Calibration Coefficient (N) |
|---|---|
| LC1 | 212.09 |
| LC2 | 207.48 |
| LC3 | 204.24 |
| LC4 | 191.79 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vrhovski, Z.; Benkek, G.; Husak, K.; Sekovanić, I. Development and Validation of a System for Game Control Based on a Force Plate. Appl. Sci. 2023, 13, 11753. https://doi.org/10.3390/app132111753
Vrhovski Z, Benkek G, Husak K, Sekovanić I. Development and Validation of a System for Game Control Based on a Force Plate. Applied Sciences. 2023; 13(21):11753. https://doi.org/10.3390/app132111753
Chicago/Turabian StyleVrhovski, Zoran, Goran Benkek, Krunoslav Husak, and Ivan Sekovanić. 2023. "Development and Validation of a System for Game Control Based on a Force Plate" Applied Sciences 13, no. 21: 11753. https://doi.org/10.3390/app132111753