
Impact of Traditional and Embedded Image Denoising on CNN-Based Deep Learning

Abstract
:1. Introduction
Motivation and Contributions of Research Work
- We filter image noise from training and test data sets using traditional methods of filtering noise such as median filter and Gaussian filter.
- We embed a layer for image denoising in the CNN model. Then, we compare the traffic sign and general object recognition accuracy and processing time for the CNN algorithm with the traditional approach of denoising and embedded denoising against a baseline approach called without denoising.
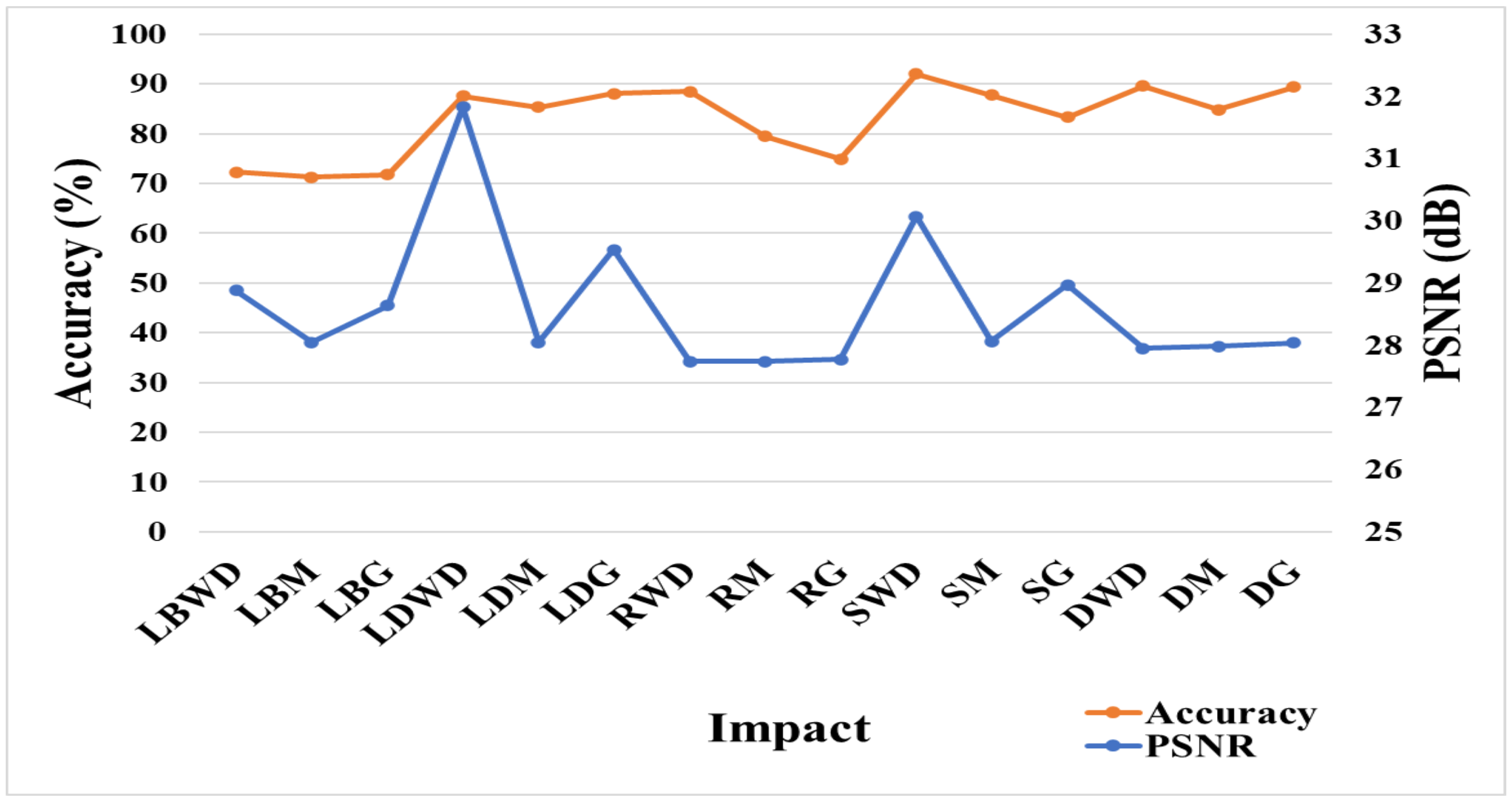
- For the detection accuracy and computational time performance, we use challenging unreal and real environments for traffic sign recognition (CURE-TSR) [18] and challenging unreal and real environments for object recognition (CURE-OR) [19] datasets. We use environmental impacts such as rain, shadow, darkness, and snow. For camera impacts, we cover lens blur and lens dirtiness from both CURE-TSR and CURE-OR datasets. We utilize impacts such as contrast, salt and pepper noise, overexposure, and underexposure, from the CURE-OR dataset. The recognition accuracy of CNN for the traditional denoising approach shows superior performance to that when image denoising is embedded in CNN.
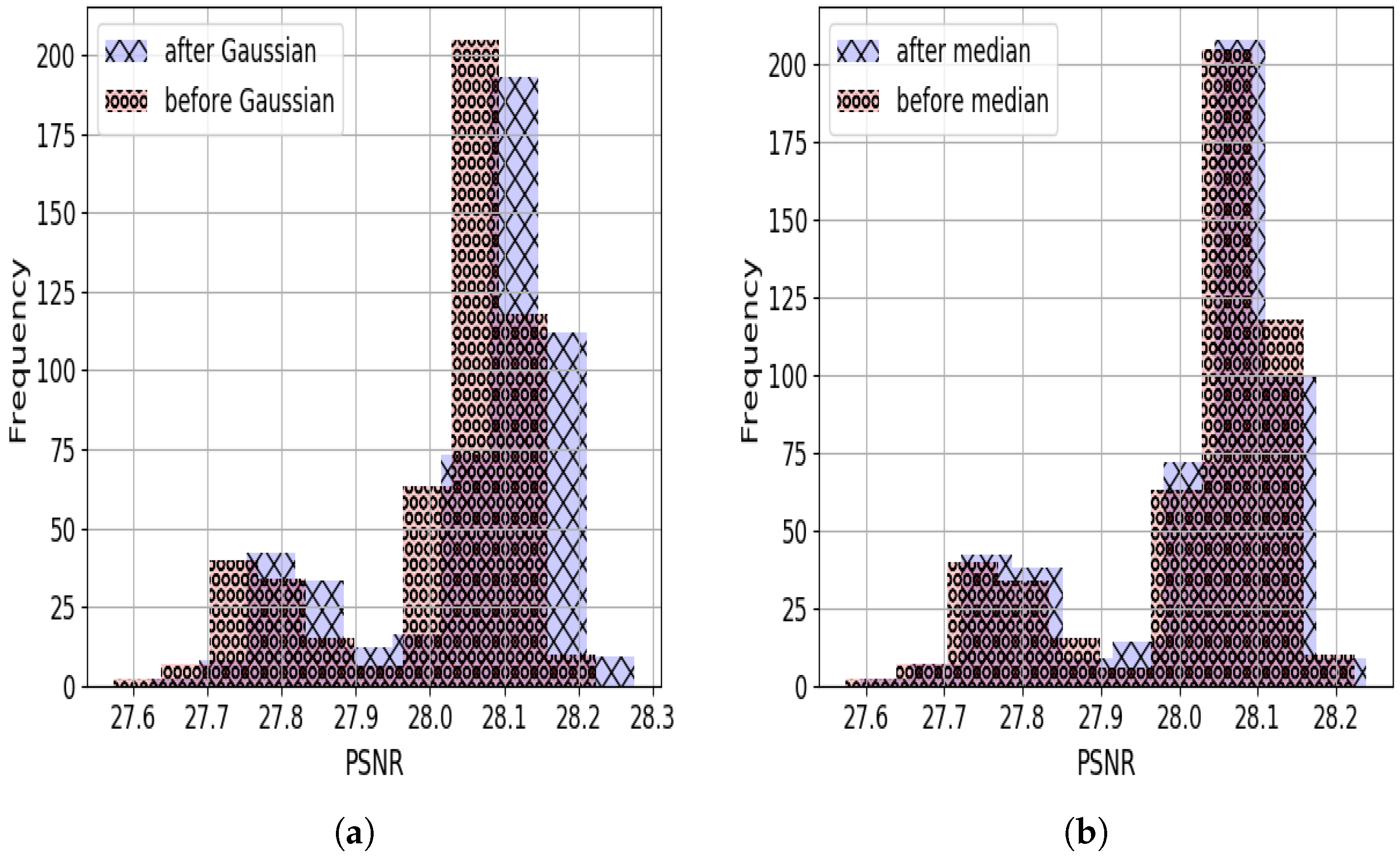
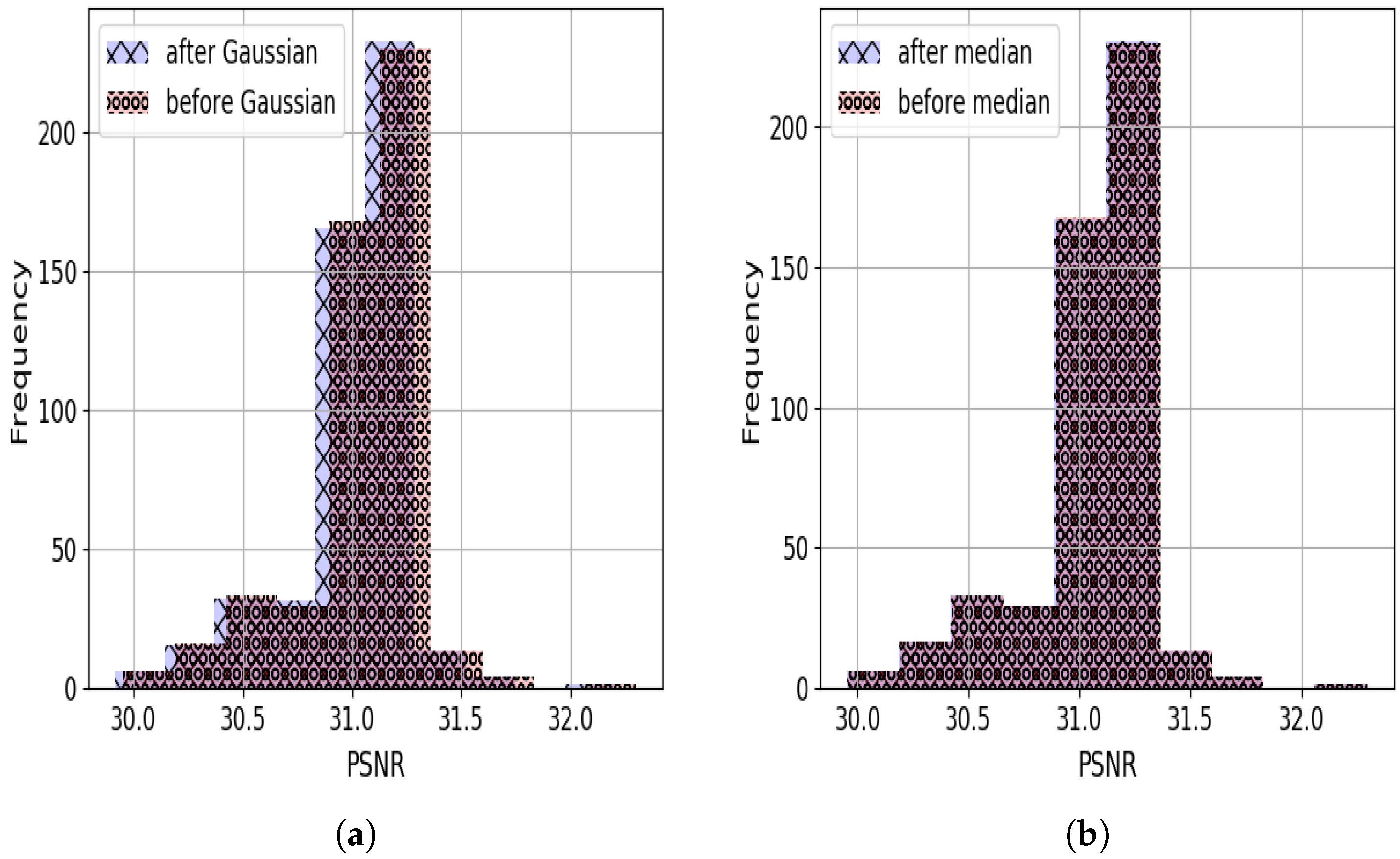
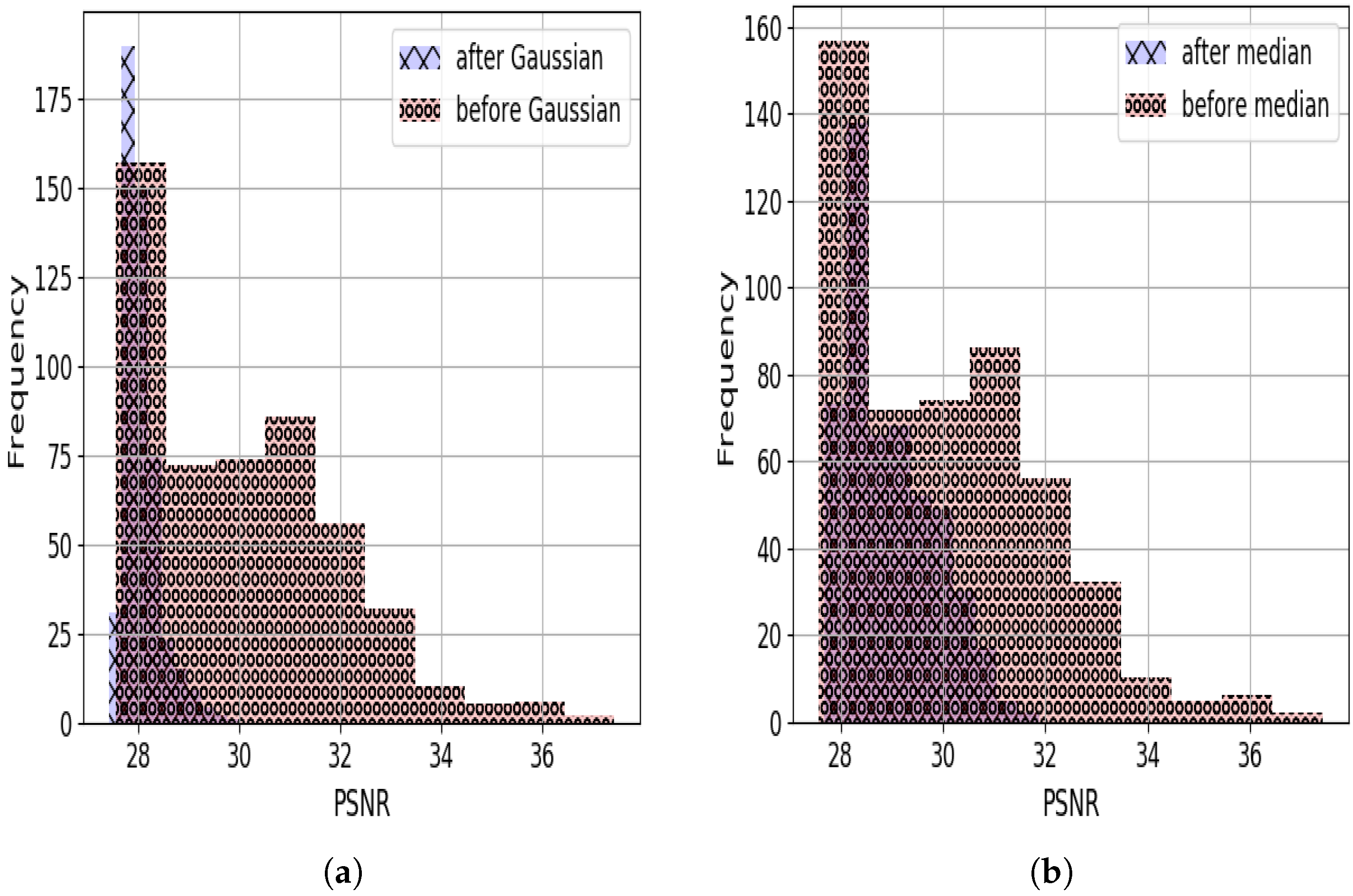
- To decide whether denoising would be adopted, we calculate the distribution (histogram) of PSNRs of the images of the dataset affected by impacts before and after denoising. Through PSNR histograms, we assess whether the quality of images has been improved based on our developed two principles. The histograms were produced using the two data sets for all impact types mentioned in Contribution 3 for the median and Gaussian filters. When the overall quality of images is improved after denoising, these histograms support the adoption of filtering for CNN-based image recognition.
2. Literature Review
2.1. Image Denoising Techniques
2.2. Approaches Embedding Image Denoising in Deep Learning
2.3. CNN and Transformers for Image Recognition
3. Methodology for Comparative Study
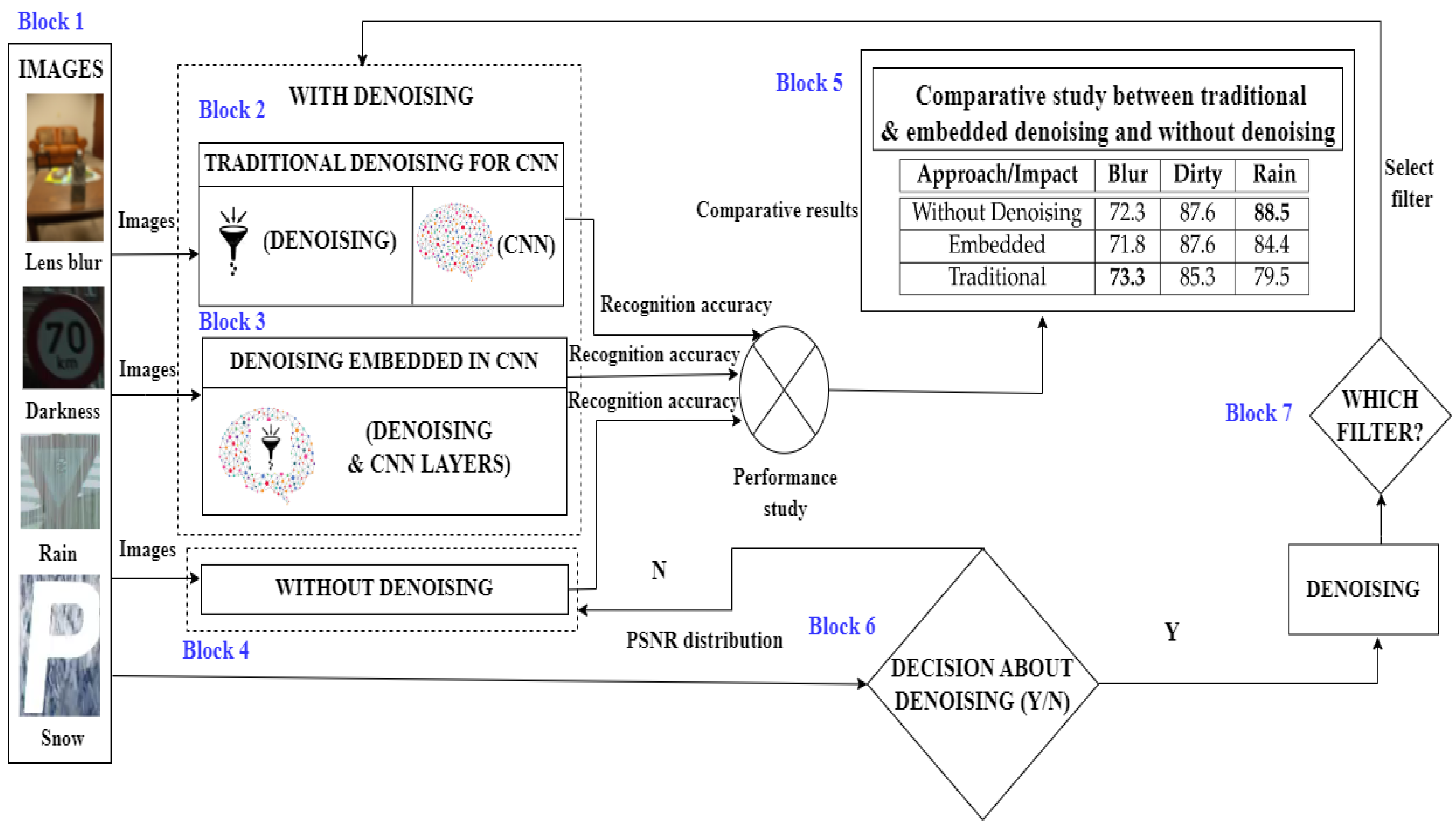
3.1. Overview of the Comparative Study
- For the traditional denoising approach, firstly, denoising is carried out separately with a filter as a pre-processing step. Secondly, denoised images are utilized in CNN for the performance study of a particular application (e.g., object recognition), which is mentioned in block 2 of Figure 1.
- For the embedded denoising approach, denoising and recognition are carried out together with CNN. In this approach, a filter is embedded into the CNN model. An example of embedding a filter into CNN is illustrated in block 3 of Figure 1.
- Block 4 is without denoising, where no filtering is carried out representing a baseline approach for this comparative study. The recognition accuracy is measured without any filtering with CNN.
- Input images (refer to block 1 of Figure 1) are also used for deciding whether denoising will be adopted for a particular application based on the decision derived in the Y/N form (refer to block 6 of Figure 1). Once the decision is adopted for filtering and if the type of noise present is unknown, we can compare the PSNR before and after noise removal and choose the filter that provides the best performance in improving image quality after filtering, which is given in block 7 of Figure 1.
3.2. Methodology for Comparative Analysis on Denoising in CNN-Based Approaches
- Higher frequency values for higher PSNRs.
- If the histogram is right skewed.
3.3. Datasets
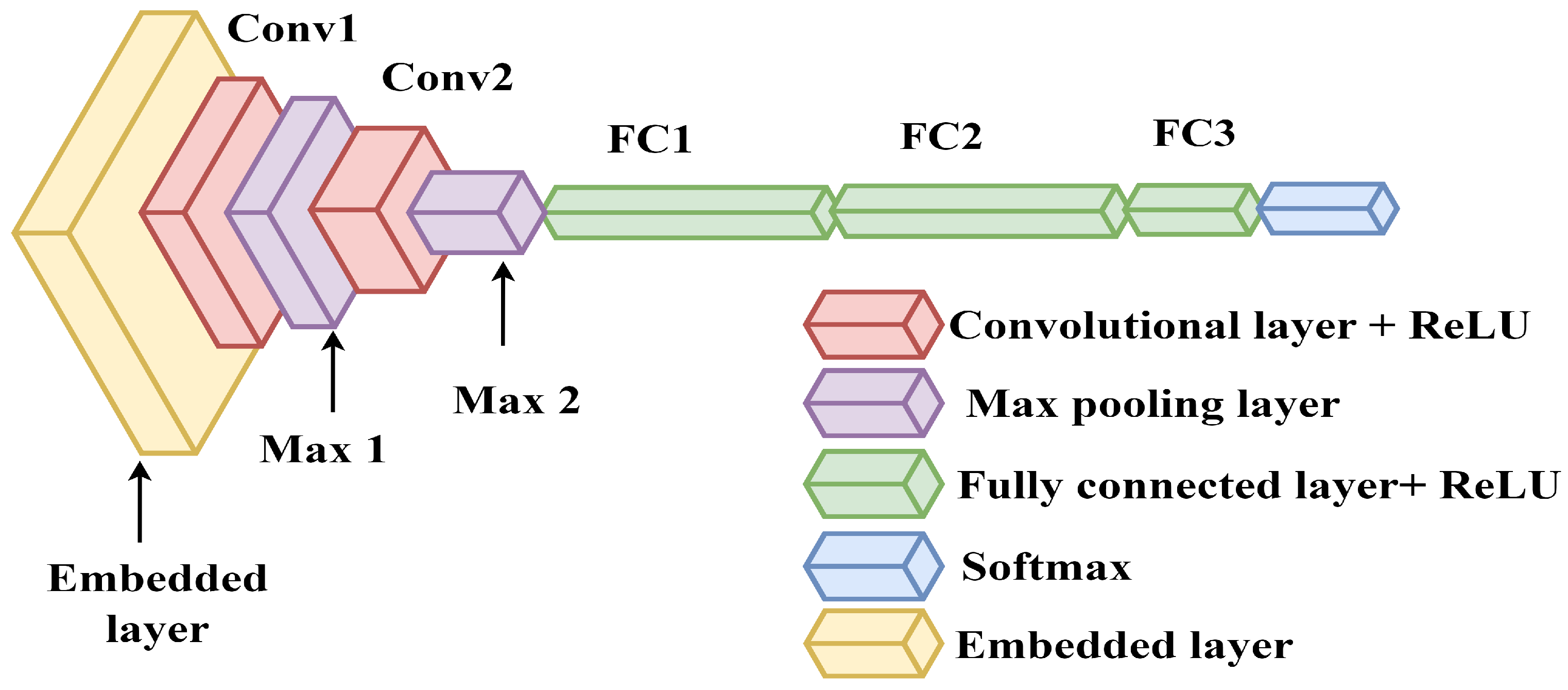
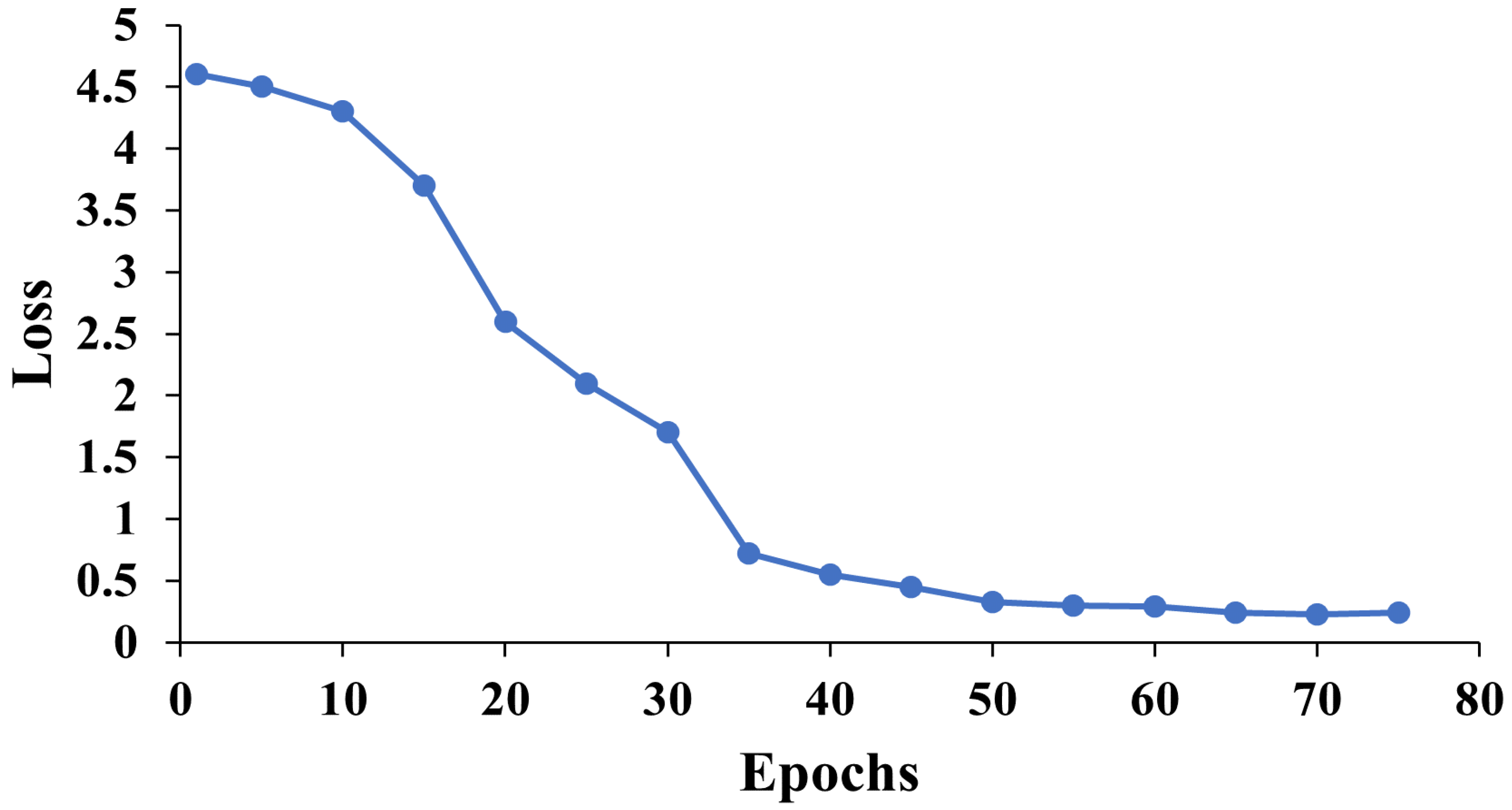
3.4. Description of CNN Model and Their Parameters
4. Results and Discussion
4.1. Experimental Hardware and Software Settings
4.2. Recognition and Computational Time Analysis for CURE-TSR
4.2.1. Traffic Sign Recognition Accuracy
4.2.2. Computational Time for Traffic Sign Recognition
4.3. Recognition and Computational Time Analysis for CURE-OR
4.3.1. Object Recognition Accuracy
4.3.2. Computational Time for Object Recognition
4.4. Decision about Denoising Needs to Be Made
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Juneja, A.; Kumar, V.; Singla, S.K. A systematic review on foggy datasets: Applications and challenges. Arch. Comput. Methods Eng. 2022, 29, 1727–1752. [Google Scholar] [CrossRef]
- Mehra, A.; Mandal, M.; Narang, P.; Chamola, V. Reviewnet: A fast and resource optimized network for enabling safe autonomous driving in hazy weather conditions. IEEE Trans. Intell. Transp. Syst. 2020, 22, 4256–4266. [Google Scholar] [CrossRef]
- Zhang, Y.; Carballo, A.; Yang, H.; Takeda, K. Perception and sensing for autonomous vehicles under adverse weather conditions: A survey. ISPRS J. Photogramm. Remote Sens. 2023, 196, 146–177. [Google Scholar] [CrossRef]
- Kaur, R.; Karmakar, G.; Xia, F. Evaluating Outdoor Environmental Impacts for Image Understanding and Preparation. In Image Processing and Intelligent Computing Systems; CRC Press: Boca Raton, FL, USA, 2023; pp. 267–295. [Google Scholar]
- Kaur, R.; Karmakar, G.; Xia, F.; Imran, M. Deep learning: Survey of environmental and camera impacts on internet of things images. Artif. Intell. Rev. 2023, 56, 9605–9638. [Google Scholar] [CrossRef]
- Bharati, S.; Khan, T.Z.; Podder, P.; Hung, N.Q. A comparative analysis of image denoising problem: Noise models, denoising filters and applications. In Cognitive Internet of Medical Things for Smart Healthcare; Springer: Berlin/Heidelberg, Germany, 2021; pp. 49–66. [Google Scholar]
- Elad, M.; Kawar, B.; Vaksman, G. Image Denoising: The Deep Learning Revolution and Beyond—A Survey Paper. arXiv 2023, arXiv:2301.03362. [Google Scholar] [CrossRef]
- Patil, R.; Bhosale, S. Medical image denoising techniques: A review. Int. J. Eng. Sci. Technol. (IJonEST) 2022, 4, 21–33. [Google Scholar] [CrossRef]
- Rama Lakshmi, G.; Divya, G.; Bhavya, D.; Sai Jahnavi, C.; Akila, B. A Review on Image Denoising Algorithms for Various Applications. In Proceedings of the Fourth International Conference on Communication, Computing and Electronics Systems: ICCCES 2022, Coimbatore, India, 15–16 September 2022; Springer: Berlin/Heidelberg, Germany, 2023; pp. 839–847. [Google Scholar]
- You, N.; Han, L.; Zhu, D.; Song, W. Research on image denoising in edge detection based on wavelet transform. Appl. Sci. 2023, 13, 1837. [Google Scholar] [CrossRef]
- Sehgal, R.; Kaushik, V.D. CT Image Denoising Using Bilateral Filter and Method Noise Thresholding in Shearlet Domain. In Emerging Technologies in Data Mining and Information Security: Proceedings of IEMIS 2022, Volume 1; Springer: Berlin/Heidelberg, Germany, 2022; pp. 99–106. [Google Scholar]
- Snehalatha, M.; Ramamurthy, N.; Swetha, K.; Vishnupriya, K.; Sreelekha, P.; Niharika, N. An Effective Image Denoising in Spatial Domain Using Bilateral Filter. J. Electron. Commun. Syst. 2022, 7, 9–14. [Google Scholar] [CrossRef]
- Liyanage, N.; Abeywardena, K.; Jayaweera, S.S.; Wijenayake, C.; Edussooriya, C.U.S.; Seneviratne, S. Making Sense of Occluded Scenes using Light Field Pre-processing and Deep-learning. In Proceedings of the 2020 IEEE REGION 10 CONFERENCE (TENCON), Osaka, Japan, 16–19 November 2020; pp. 538–543. [Google Scholar] [CrossRef]
- Duong, M.T.; Phan, T.D.; Truong, N.N.; Le, M.C.; Do, T.D.; Nguyen, V.B.; Le, M.H. An Image Enhancement Method for Autonomous Vehicles Driving in Poor Visibility Circumstances. In Proceedings of the Computational Intelligence Methods for Green Technology and Sustainable Development: Proceedings of the International Conference GTSD2022, Nha Trang City, Vietnam, 29–30 July 2022; Springer: Berlin/Heidelberg, Germany, 2022; pp. 13–25. [Google Scholar]
- Priyanka, S.A.; Wang, Y.K. Fully symmetric convolutional network for effective image denoising. Appl. Sci. 2019, 9, 778. [Google Scholar] [CrossRef]
- Tian, C.; Xu, Y.; Zuo, W. Image denoising using deep CNN with batch renormalization. Neural Netw. 2020, 121, 461–473. [Google Scholar] [CrossRef]
- Yang, L.; Fan, J.; Huo, B.; Li, E.; Liu, Y. Image Denoising of Seam Images With Deep Learning for Laser Vision Seam Tracking. IEEE Sens. J. 2022, 22, 6098–6107. [Google Scholar] [CrossRef]
- Temel, D.; Kwon, G.; Prabhushankar, M.; AlRegib, G. CURE-TSR: Challenging Unreal and Real Environments for Traffic Sign Recognition. arXiv 2019, arXiv:1712.02463. [Google Scholar] [CrossRef]
- Temel, D.; Lee, J.; AlRegib, G. CURE-OR: Challenging Unreal and Real Environment for Object Recognition. arXiv 2019, arXiv:1810.08293. [Google Scholar] [CrossRef]
- Fan, L.; Zhang, F.; Fan, H.; Zhang, C. Brief review of image denoising techniques. Vis. Comput. Ind. Biomed. Art 2019, 2, 7. [Google Scholar] [CrossRef]
- Gu, S.; Timofte, R. A brief review of image denoising algorithms and beyond. In Inpainting and Denoising Challenges; Springer: Berlin/Heidelberg, Germany, 2019; pp. 1–21. [Google Scholar]
- Monajati, M.; Kabir, E. A modified inexact arithmetic median filter for removing salt-and-pepper noise from gray-level images. IEEE Trans. Circuits Syst. II Express Briefs 2019, 67, 750–754. [Google Scholar] [CrossRef]
- Erkan, U.; Gökrem, L.; Enginoğlu, S. Different applied median filter in salt and pepper noise. Comput. Electr. Eng. 2018, 70, 789–798. [Google Scholar] [CrossRef]
- Kumar, S.; Bhardwaj, U.; Poongodi, T. Cartoonify an Image using Open CV in Python. In Proceedings of the 2022 3rd International Conference on Intelligent Engineering and Management (ICIEM), London, UK, 27–29 April 2022; IEEE: New York, NY, USA, 2022; pp. 952–955. [Google Scholar]
- Buades, A.; Coll, B.; Morel, J.M. A review of image denoising algorithms, with a new one. Multiscale Model. Simul. 2005, 4, 490–530. [Google Scholar] [CrossRef]
- Ahmad, K.; Khan, J.; Iqbal, M.S.U.D. A comparative study of different denoising techniques in digital image processing. In Proceedings of the 2019 8th International Conference on Modeling Simulation and Applied Optimization (ICMSAO), Manama, Bahrain, 15–17 April 2019; IEEE: New York, NY, USA, 2019; pp. 1–6. [Google Scholar]
- Han, Y.; Ye, J.C. Framing U-Net via deep convolutional framelets: Application to sparse-view CT. IEEE Trans. Med Imaging 2018, 37, 1418–1429. [Google Scholar] [CrossRef]
- Zhang, K.; Zuo, W.; Chen, Y.; Meng, D.; Zhang, L. Beyond a gaussian denoiser: Residual learning of deep cnn for image denoising. IEEE Trans. Image Process. 2017, 26, 3142–3155. [Google Scholar] [CrossRef]
- Liu, L.; Liu, B.; Huang, H.; Bovik, A.C. No-reference image quality assessment based on spatial and spectral entropies. Signal Process. Image Commun. 2014, 29, 856–863. [Google Scholar] [CrossRef]
- Vemulapalli, R.; Tuzel, O.; Liu, M.Y. Deep gaussian conditional random field network: A model-based deep network for discriminative denoising. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 4801–4809. [Google Scholar]
- Plotz, T.; Roth, S. Benchmarking denoising algorithms with real photographs. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1586–1595. [Google Scholar]
- Zhang, Q.; Xiao, J.; Tian, C.; Chun-Wei Lin, J.; Zhang, S. A robust deformed convolutional neural network (CNN) for image denoising. CAAI Trans. Intell. Technol. 2023, 8, 331–342. [Google Scholar] [CrossRef]
- Tai, Y.; Yang, J.; Liu, X.; Xu, C. Memnet: A persistent memory network for image restoration. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 4539–4547. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention–MICCAI 2015: 18th International Conference, Munich, Germany, 5–9 October 2015; pp. 234–241. [Google Scholar]
- Huang, G.; Liu, Z.; Van Der Maaten, L.; Weinberger, K.Q. Densely connected convolutional networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 4700–4708. [Google Scholar]
- Gao, X.; Zhang, L.; Mou, X. Single image super-resolution using dual-branch convolutional neural network. IEEE Access 2018, 7, 15767–15778. [Google Scholar] [CrossRef]
- Liu, G.; Dang, M.; Liu, J.; Xiang, R.; Tian, Y.; Luo, N. True wide convolutional neural network for image denoising. Inf. Sci. 2022, 610, 171–184. [Google Scholar] [CrossRef]
- Zhang, K.; Zuo, W.; Zhang, L. FFDNet: Toward a fast and flexible solution for CNN-based image denoising. IEEE Trans. Image Process. 2018, 27, 4608–4622. [Google Scholar] [CrossRef]
- Saeed, A.; Nick, B. Real Image Denoising With Feature Attention. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October–2 November 2019; pp. 3155–3164. [Google Scholar]
- Guo, S.; Yan, Z.; Zhang, K.; Zuo, W.; Zhang, L. Toward convolutional blind denoising of real photographs. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 1712–1722. [Google Scholar]
- Alawode, B.O.; Alfarraj, M. Meta-Optimization of Deep CNN for Image Denoising Using LSTM. arXiv 2021, arXiv:2107.06845. [Google Scholar]
- Li, Z.; Wu, J. Learning deep CNN denoiser priors for depth image inpainting. Appl. Sci. 2019, 9, 1103. [Google Scholar] [CrossRef]
- Tian, C.; Xu, Y.; Li, Z.; Zuo, W.; Fei, L.; Liu, H. Attention-guided CNN for image denoising. Neural Netw. 2020, 124, 117–129. [Google Scholar] [CrossRef]
- Chaudhary, S.; Moon, S.; Lu, H. Fast, efficient, and accurate neuro-imaging denoising via supervised deep learning. Nat. Commun. 2022, 13, 5165. [Google Scholar] [CrossRef]
- Zhao, M.; Cao, G.; Huang, X.; Yang, L. Hybrid Transformer-CNN for Real Image Denoising. IEEE Signal Process. Lett. 2022, 29, 1252–1256. [Google Scholar] [CrossRef]
- Xue, T.; Ma, P. TC-net: Transformer combined with cnn for image denoising. Appl. Intell. 2023, 53, 6753–6762. [Google Scholar] [CrossRef]
- Zheng, Y.; Jiang, W. Evaluation of vision transformers for traffic sign classification. Wirel. Commun. Mob. Comput. 2022, 2022, 3041117. [Google Scholar] [CrossRef]
- Wang, H. Traffic Sign Recognition with Vision Transformers. In Proceedings of the 6th International Conference on Information System and Data Mining, Silicon Valley, CA, USA, 27–29 May 2022; pp. 55–61. [Google Scholar]
- Liang, L.; Deng, S.; Gueguen, L.; Wei, M.; Wu, X.; Qin, J. Convolutional neural network with median layers for denoising salt-and-pepper contaminations. Neurocomputing 2021, 442, 26–35. [Google Scholar] [CrossRef]
- Jin, L.; Zhang, W.; Ma, G.; Song, E. Learning deep CNNs for impulse noise removal in images. J. Vis. Commun. Image Represent. 2019, 62, 193–205. [Google Scholar] [CrossRef]
- Tian, C.; Zheng, M.; Zuo, W.; Zhang, B.; Zhang, Y.; Zhang, D. Multi-stage image denoising with the wavelet transform. Pattern Recognit. 2023, 134, 109050. [Google Scholar] [CrossRef]
- Golcarenarenji, G.; Martinez-Alpiste, I.; Wang, Q.; Alcaraz-Calero, J.M. Machine-learning-based top-view safety monitoring of ground workforce on complex industrial sites. Neural Comput. Appl. 2022, 34, 4207–4220. [Google Scholar] [CrossRef]
- Fattal, R.; Lischinski, D.; Werman, M. Gradient domain high dynamic range compression. In Proceedings of the 29th Annual Conference on Computer Graphics and Interactive Techniques, San Antonio, TX, USA, 23–26 July 2002; pp. 249–256. [Google Scholar]
- Shao, M.; Qiao, Y.; Meng, D.; Zuo, W. Uncertainty-guided hierarchical frequency domain transformer for image restoration. Knowl.-Based Syst. 2023, 263, 110306. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Type/Value |
|---|---|
| Learning rate | 0.1 |
| Epochs | 55 |
| Batch size | 256 |
| Activation function | ReLU |
| Classifer | Softmax |
| Convolutional layers | 3 |
| Max-pooling | 2 |
| Fully connected layers | 3 |
| Impact Levels | Darkness | Shadow | ||
|---|---|---|---|---|
| Mean | SD | Mean | SD | |
| Without impact | 117.7 | 97.52 | 117.7 | 97.52 |
| Level 1 | 85.99 | 71.36 | 108.12 | 89.07 |
| Level 2 | 45.75 | 37.82 | 98.37 | 81.51 |
| Level 3 | 24.49 | 20.21 | 88.91 | 76.86 |
| Level 4 | 13.04 | 10.79 | 79.13 | 74.5 |
| Level 5 | 6.93 | 5.84 | 69.49 | 75.09 |
| Acc. for Each Impact (%) | Total | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Impact | Blur | Dirty | Rain | Snow | SH | DK | Mean | SD | |
| Approach | |||||||||
| Without denoising | 72.3 | 87.6 | 88.5 | 1.9 | 92 | 89.6 | 71.9 | 31.9 | |
| Embedded median | 71.8 | 87.6 | 84.4 | 35.6 | 90.7 | 89.2 | 76.5 | 19.33 | |
| Embedded Gaussian | 71.3 | 88.1 | 86.3 | 1.9 | 91.1 | 89.2 | 71.31 | 31.7 | |
| Traditional median | 73.3 | 85.3 | 79.5 | 35.6 | 87.8 | 84.8 | 74.3 | 17.9 | |
| Traditional Gaussian | 70.3 | 80.4 | 74.9 | 1.9 | 83.3 | 1.9 | 52.1 | 35.7 | |
| Computational Time for Each Impact | Total | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Impact | Blur | Dirty | Rain | Snow | SH | DK | Mean | SD | |
| Approach | |||||||||
| Without Denoising | 46 | 45.66 | 45.8 | 43.3 | 43.2 | 38.7 | 43.7 | 2.78 | |
| Embedded median | 50.5 | 43 | 45.19 | 44.3 | 44.4 | 46.6 | 45.6 | 2.64 | |
| Embedded Gaussian | 35.6 | 36.9 | 36.5 | 35.8 | 38.5 | 36.4 | 36.6 | 1.03 | |
| Traditional median | 46.2 | 51.3 | 54.4 | 43.3 | 44.7 | 43.2 | 47.1 | 4.62 | |
| Traditional Gaussian | 41.6 | 51 | 54 | 43.4 | 43.1 | 44.6 | 46.2 | 5 | |
| OR Accuracy for Each Impact (%) | Total | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Impact | Blur | Dirty | S & P | CT | OE | UE | Mean | SD | |
| Approach | |||||||||
| Without Denoising | 52.6 | 35.84 | 53.7 | 55.8 | 43.5 | 42.4 | 47.3 | 7.2 | |
| Embedded median | 32.8 | 34.4 | 41.4 | 31.3 | 34.4 | 30.2 | 34 | 3.6 | |
| Embedded Gaussian | 49.1 | 46.2 | 50.4 | 55 | 46.5 | 50.7 | 49.6 | 2.9 | |
| Traditional median | 52.6 | 35.6 | 50.5 | 60.4 | 34.4 | 32.1 | 44.2 | 10.7 | |
| Traditional Gaussian | 46.7 | 47.6 | 39.2 | 49.6 | 47.6 | 45.9 | 46.1 | 3.2 | |
| Computational Time for Each Impact | Total | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Impact | Blur | Dirty | S & P | CT | OE | UE | Mean | SD | |
| Approach | |||||||||
| Without denoising | 60.1 | 41.8 | 43.5 | 46.3 | 48 | 36.9 | 46.1 | 7.86 | |
| Embedded median | 40.4 | 42.4 | 43.8 | 60 | 67.8 | 45.4 | 49.9 | 11.19 | |
| Embedded Gaussian | 39.4 | 61.3 | 41.8 | 48.5 | 37.5 | 41.2 | 44.9 | 8.83 | |
| Traditional median | 64.9 | 39.3 | 118.4 | 64.8 | 47.6 | 65.5 | 66.7 | 27.55 | |
| Traditional Gaussian | 39.2 | 43 | 40.3 | 37.6 | 35.4 | 65.2 | 43.4 | 10.95 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kaur, R.; Karmakar, G.; Imran, M. Impact of Traditional and Embedded Image Denoising on CNN-Based Deep Learning. Appl. Sci. 2023, 13, 11560. https://doi.org/10.3390/app132011560
Kaur R, Karmakar G, Imran M. Impact of Traditional and Embedded Image Denoising on CNN-Based Deep Learning. Applied Sciences. 2023; 13(20):11560. https://doi.org/10.3390/app132011560
Chicago/Turabian StyleKaur, Roopdeep, Gour Karmakar, and Muhammad Imran. 2023. "Impact of Traditional and Embedded Image Denoising on CNN-Based Deep Learning" Applied Sciences 13, no. 20: 11560. https://doi.org/10.3390/app132011560