
Fully Distributed, Event-Triggered Containment Control of Multi-Agent Systems Based on Wireless Sensor Networks and Time Base Generators

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminary Knowledge and a Description of the Issue
2.1. Graph Theory
2.2. Time Base Generator
- if , is a minimum of .
- When time first begins, , and at the time moment , the value of satisfies , , and is a function that does not decrease.
- The initial derivative of ’s temporal function at the instant and at satisfies and .
- When , and maintain the same, where and .
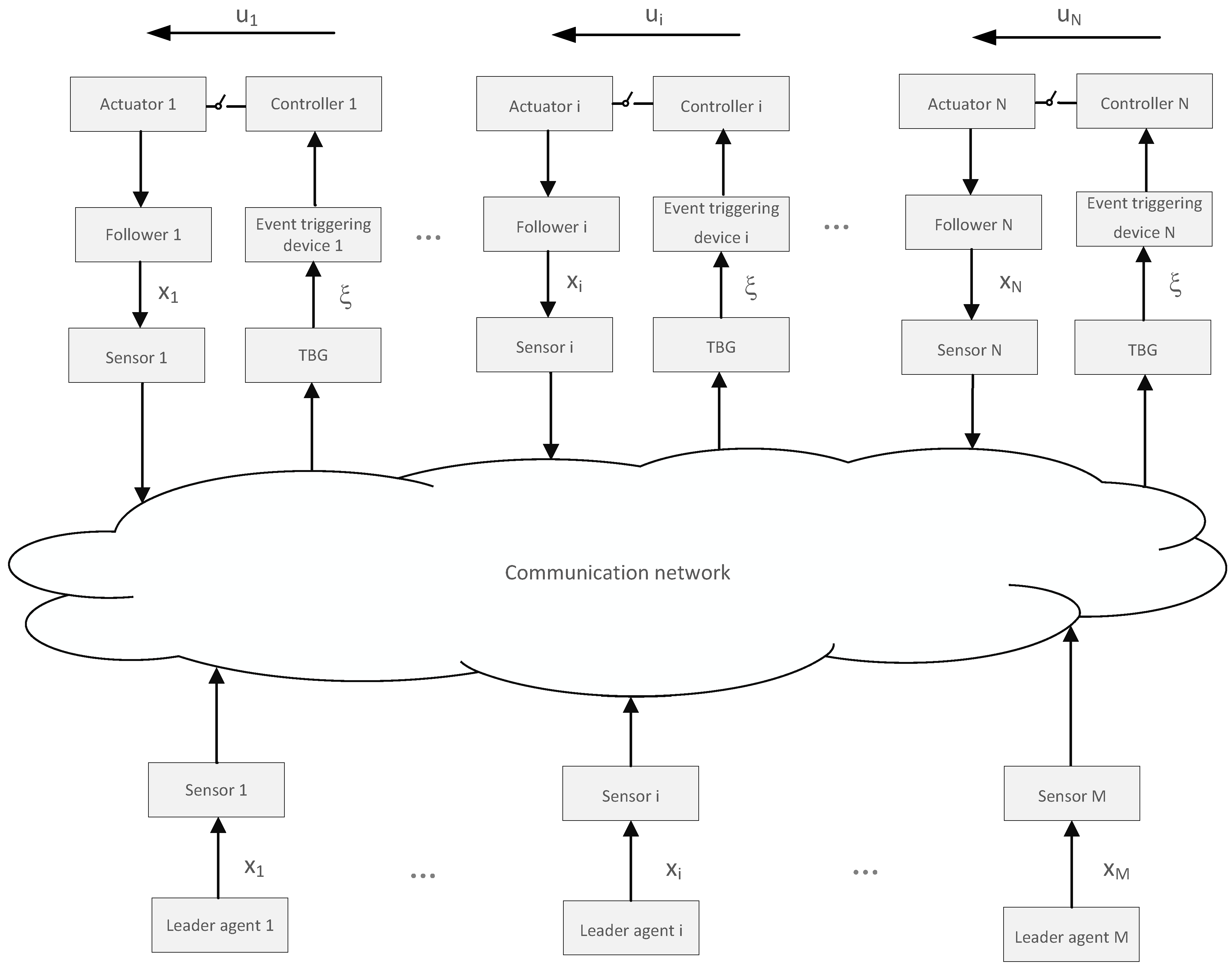
2.3. Problem Description
3. Main Results
- 1.
- Let us find a positive definite matrix that satisfies:
- 2.
- 3.
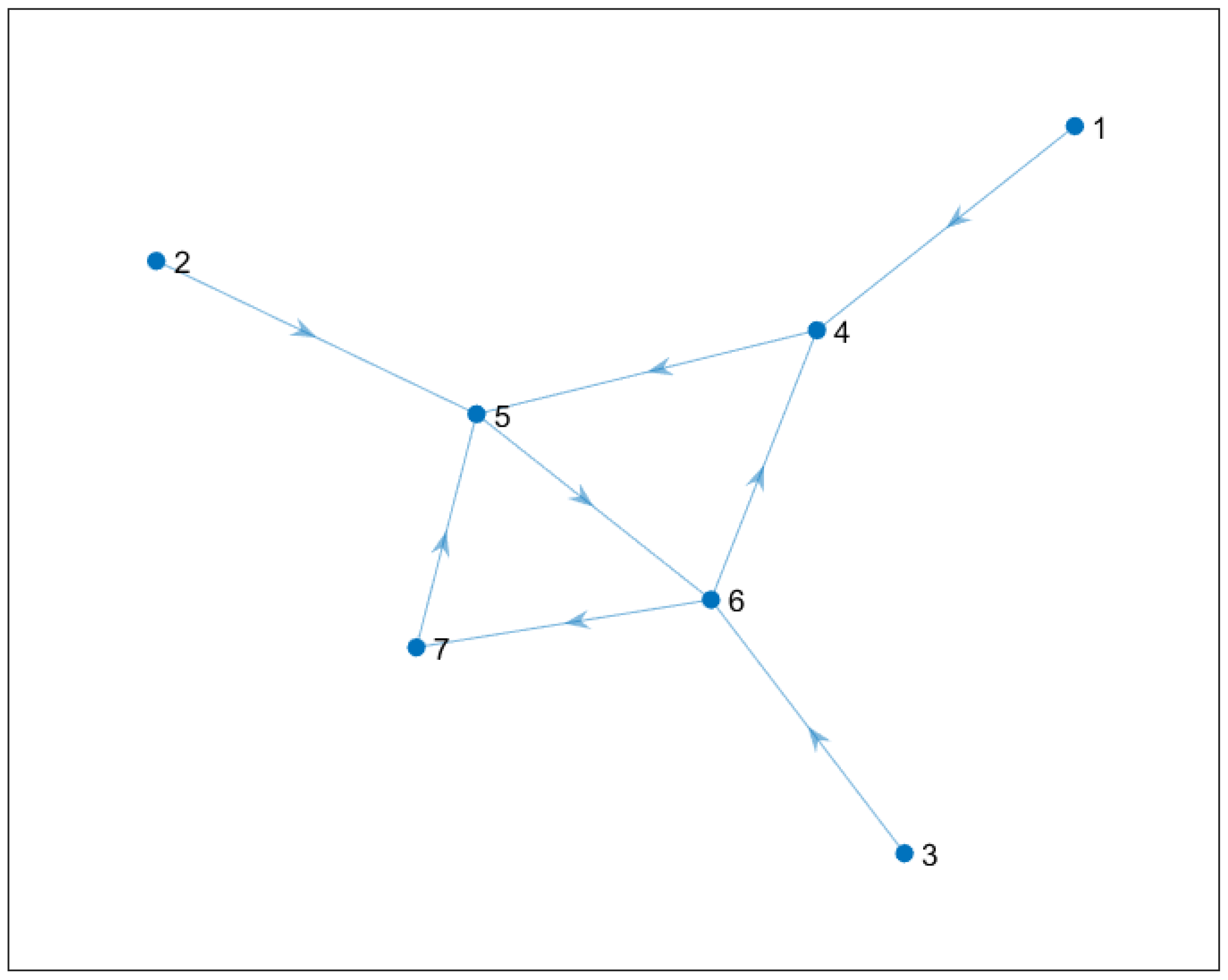
4. Simulation Example
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xu, B.; Lu, M.; Zhang, H.; Pan, C. A Novel Multi-Agent Model for Robustness with Component Failure and Malware Propagation in Wireless Sensor Networks. Sensors 2021, 21, 4873. [Google Scholar] [CrossRef] [PubMed]
- Peng, Z.; Liu, L.; Wang, J. Output-Feedback Flocking Control of Multiple Autonomous Surface Vehicles Based on Data-Driven Adaptive Extended State Observers. IEEE Trans. Cybern. 2021, 51, 4611–4622. [Google Scholar] [CrossRef] [PubMed]
- Ibuki, T.; Wilson, S.; Yamauchi, J.; Fujita, M.; Egerstedt, M. Optimization-Based Distributed Flocking Control for Multiple Rigid Bodies. IEEE Robot. Autom. Lett. 2020, 5, 1891–1898. [Google Scholar] [CrossRef]
- Abichandani, P.; Speck, C.; Bucci, D.; Mcintyre, W.; Lobo, D. Implementation of Decentralized Reinforcement Learning-Based Multi-Quadrotor Flocking. IEEE Access 2021, 9, 132491–132507. [Google Scholar] [CrossRef]
- Stamouli, C.J.; Bechlioulis, C.P.; Kyriakopoulos, K.J. Multi-Agent Formation Control Based on Distributed Estimation With Prescribed Performance. IEEE Robot. Autom. Lett. 2020, 5, 2929–2934. [Google Scholar] [CrossRef]
- Du, X.; Li, W.; Xiao, J.; Chen, Z. Time-Varying Group Formation With Adaptive Control for Second-Order Multi-Agent Systems. IEEE Access 2022, 10, 45337–45346. [Google Scholar] [CrossRef]
- Cui, Y.; Liu, X.; Deng, X.; Wang, Q. Observer-based adaptive fuzzy formation control of nonlinear multi-agent systems with nonstrict-feedback form. Int. J. Fuzzy Syst. 2021, 23, 680–691. [Google Scholar] [CrossRef]
- Li, T.; Li, Z.; Fei, S.; Ding, Z. Second-order event-triggered adaptive containment control for a class of multi-agent systems. ISA Trans. 2020, 96, 132–142. [Google Scholar] [CrossRef]
- Zhang, J.; Yan, F.; Feng, T.; Deng, T.; Zhao, Y. Fastest containment control of discrete-time multi-agent systems using static linear feedback protocol. Inf. Sci. 2022, 614, 362–373. [Google Scholar] [CrossRef]
- Wang, D.; Wang, W. Necessary and sufficient conditions for containment control of multi-agent systems with time delay. Automatica 2019, 103, 418–423. [Google Scholar] [CrossRef]
- Li, Y.; Qu, F.; Tong, S. Observer-Based Fuzzy Adaptive Finite-Time Containment Control of Nonlinear Multiagent Systems With Input Delay. IEEE Trans. Cybern. 2021, 51, 126–137. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Liang, H.; Pan, Y.; Li, T. Prescribed Performance Adaptive Fuzzy Containment Control for Nonlinear Multiagent Systems Using Disturbance Observer. IEEE Trans. Cybern. 2020, 50, 3879–3891. [Google Scholar] [CrossRef] [PubMed]
- Lu, Y.; Dong, X.; Li, Q.; Lu, J.; Ren, Z. Time-Varying Group Formation-Containment Tracking Control for General Linear Multiagent Systems With Unknown Inputs. IEEE Trans. Cybern. 2022, 52, 11055–11067. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Zhang, H.; Sun, J.; Wang, Y. Adaptive Fuzzy Containment Control for Multi agent Systems With State Constraints Using Unified Transformation Functions. IEEE Trans. Fuzzy Syst. 2022, 30, 162–174. [Google Scholar] [CrossRef]
- Chen, Z.; Cai, L.; Zhao, C. Convergence time of average consensus with heterogeneous random link failures. Automatica 2021, 127, 109496. [Google Scholar] [CrossRef]
- Ullah, S.; Khan, L.; Sami, I.; Ullah, N. Consensus-Based Delay-Tolerant Distributed Secondary Control Strategy for Droop Controlled AC Microgrids. IEEE Access 2021, 9, 6033–6049. [Google Scholar] [CrossRef]
- Hu, A.H.; Wang, Y.; Cao, J.D.; Alsaedi, A. Event-triggered bipartite consensus of multi-agent systems with switching partial couplings and topologies. Inf. Sci. 2020, 521, 1–13. [Google Scholar] [CrossRef]
- Sun, K.; Qiu, J.; Karimi, H.R.; Fu, Y. Event-triggered robust fuzzy adaptive finite-time control of nonlinear systems with prescribed performance. IEEE Trans. Fuzzy Syst. 2020, 29, 1460–1471. [Google Scholar] [CrossRef]
- Girard, A. Dynamic triggering mechanisms for event-triggered control. IEEE Trans. Autom. Control 2015, 60, 1992–1997. [Google Scholar] [CrossRef]
- Zhao, D.; Wang, Z.D.; Wei, G.L.; Han, Q.L. A dynamic event-triggered approach to observer-based PID security control subject to deception attacks. Automatica 2020, 120, 109128. [Google Scholar] [CrossRef]
- Cheng, W.; Zhang, K.; Jiang, B.; Ding, S.X. Fixed-Time Fault Tolerant Formation Control for Heterogeneous Multi-Agent Systems With Parameter Uncertainties and Disturbances. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 2121–2133. [Google Scholar] [CrossRef]
- Sun, Y.; Shi, P.; Lim, C.C. Event-triggered sliding mode scaled consensus control for multi-agent systems. J. Frankl. Inst. 2022, 359, 981–998. [Google Scholar] [CrossRef]
- Ma, T.; Zhang, Z.; Cui, B. Impulsive consensus of nonlinear fuzzy multi-agent systems under DoS attack. Nonlinear Anal. Hybrid Syst. 2022, 44, 101155. [Google Scholar] [CrossRef]
- Liang, H.; Guo, X.; Pan, Y.; Huang, T. Event-Triggered Fuzzy Bipartite Tracking Control for Network Systems Based on Distributed Reduced-Order Observers. IEEE Trans. Fuzzy Syst. 2021, 29, 1601–1614. [Google Scholar] [CrossRef]
- Li, X.; Tang, Y.; Karimi, H.R. Consensus of multi-agent systems via fully distributed event-triggered control. Automatica 2020, 116, 108898. [Google Scholar] [CrossRef]
- Selvaraj, P.; Kwon, O.M.; Lee, S.H.; Sakthivel, R. Equivalent-input-disturbance estimator-based event-triggered control design for master–slave neural networks. Neural Netw. 2021, 143, 413–424. [Google Scholar] [CrossRef]
- Song, G.; Shi, P.; Agarwal, R.K. Fixed-time sliding mode cooperative control for multiagent networks via event-triggered strategy. Int. J. Robust Nonlinear Control 2021, 31, 21–36. [Google Scholar] [CrossRef]
- Ni, J. Fixed-time terminal sliding mode tracking protocol design for high-order multiagent systems with directed communication topology. ISA Trans. 2022, 124, 444–457. [Google Scholar] [CrossRef]
- Zhao, M.; Gu, C.; Zhao, L.; Liu, Y. Fixed-time leader-following consensus tracking control for nonlinear multi-agent systems under jointly connected graph. Entropy 2022, 24, 1130. [Google Scholar] [CrossRef]
- Li, G.F.; Wu, Y.J.; Liu, X.C. Adaptive fixed-time consensus tracking control method for second-order multi-agent systems with disturbances. J. Frankl. Inst. 2020, 357, 1516–1531. [Google Scholar] [CrossRef]
- Hao, L.; Zhan, X.; Wu, J.; Han, T.; Yan, H. Fixed-time group consensus of nonlinear multi-agent systems via pinning control. Int. J. Control Autom. Syst. 2021, 19, 200–208. [Google Scholar] [CrossRef]
- Zou, W.; Qian, K.; Xiang, Z. Fixed-Time Consensus for a Class of Heterogeneous Nonlinear Multiagent Systems. Trans. Circuits Syst. 2020, 67, 1279–1283. [Google Scholar] [CrossRef]
- Du, H.; Wen, G.; Cheng, Y.; Lu, J. Distributed fixed-time consensus for nonlinear heterogeneous multi-agent systems. Automatica 2020, 113, 108797. [Google Scholar] [CrossRef]
- Ning, B.; Han, Q.L.; Zuo, Z. Practical fixed-time consensus for integrator-type multi-agent systems: A time base generator approach. Automatica 2019, 105, 406–414. [Google Scholar] [CrossRef]
- Meng, Z.Y.; Ren, W.; You, Z. Distributed finite-time attitude containment control for multiple rigid bodies. Automatica 2010, 46, 2092–2099. [Google Scholar] [CrossRef]
- Qin, H.D.; Chen, H.; Sun, Y.C.; Wu, Z.Y. The distributed adaptive finite-time chattering reduction containment control for multiple ocean bottom flying nodes. Int. J. Fuzzy Syst. 2019, 21, 607–619. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Chen, G.; Li, T.; Yang, R. Fully Distributed, Event-Triggered Containment Control of Multi-Agent Systems Based on Wireless Sensor Networks and Time Base Generators. Appl. Sci. 2023, 13, 11039. https://doi.org/10.3390/app131911039
Wang L, Chen G, Li T, Yang R. Fully Distributed, Event-Triggered Containment Control of Multi-Agent Systems Based on Wireless Sensor Networks and Time Base Generators. Applied Sciences. 2023; 13(19):11039. https://doi.org/10.3390/app131911039
Chicago/Turabian StyleWang, Lei, Guanwen Chen, Tai Li, and Ruitian Yang. 2023. "Fully Distributed, Event-Triggered Containment Control of Multi-Agent Systems Based on Wireless Sensor Networks and Time Base Generators" Applied Sciences 13, no. 19: 11039. https://doi.org/10.3390/app131911039