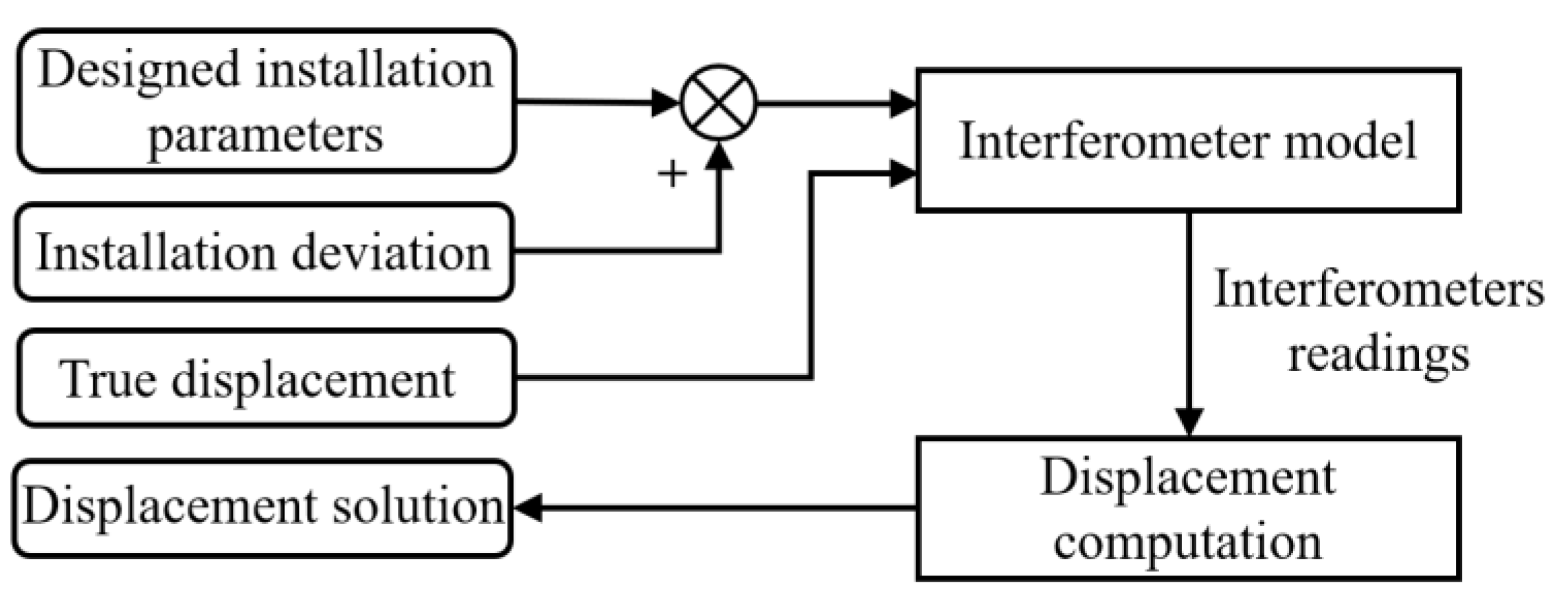
The solution and the algorithm of the multi-axis interferometer measurement model are discussed. For simplicity, only the solution of the 3-DOF displacement measurement model (4) is discussed, and the solution principle of the 6-DOF model (8) is the same.
3.1. Problem of Solving Nonlinear Equation System
Rewriting the nonlinear equation system (4) as
where
is the variable consisting of the 48 unknowns;
is the equation function of Equation (4).
The classical algorithm of the nonlinear equation system (9) is the Gauss–Newton method [
16], in which the iteration formula is
where
is the number of iterations and
is the Jacobi matrix of
.
The problem is that in the computation process of solving (4) in the form of Equation (9) by using Equation (10),
is always going to be singular and
is not invertible due to its huge condition number, which makes it impossible to continue the iteration. In fact, for a nonlinear equation system with a singular Jacobi matrix, it is proven that the solution is not unique, and both the Newton method and Gauss–Newton method lose their convergence [
16]. Hence, the improved algorithm needs to be applied. As it is proven that the solution of a nonlinear equation system with a singular Jacobi matrix is a set with at least one dimension and the Levenberg–Marquardt method (LM method) can be used to converge to a solution on the solution set [
20], the iteration formula is
where
I is the identity matrix and
μ is the steepest descent factor.
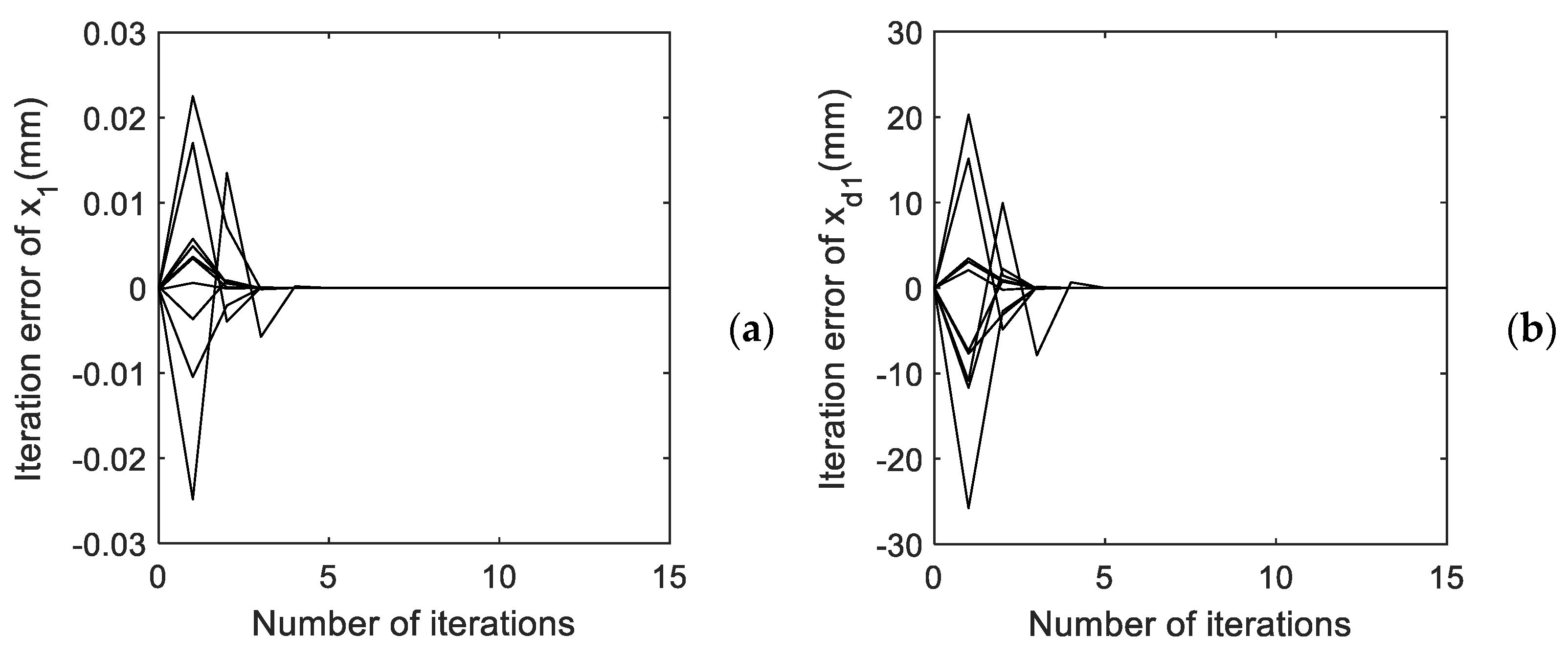
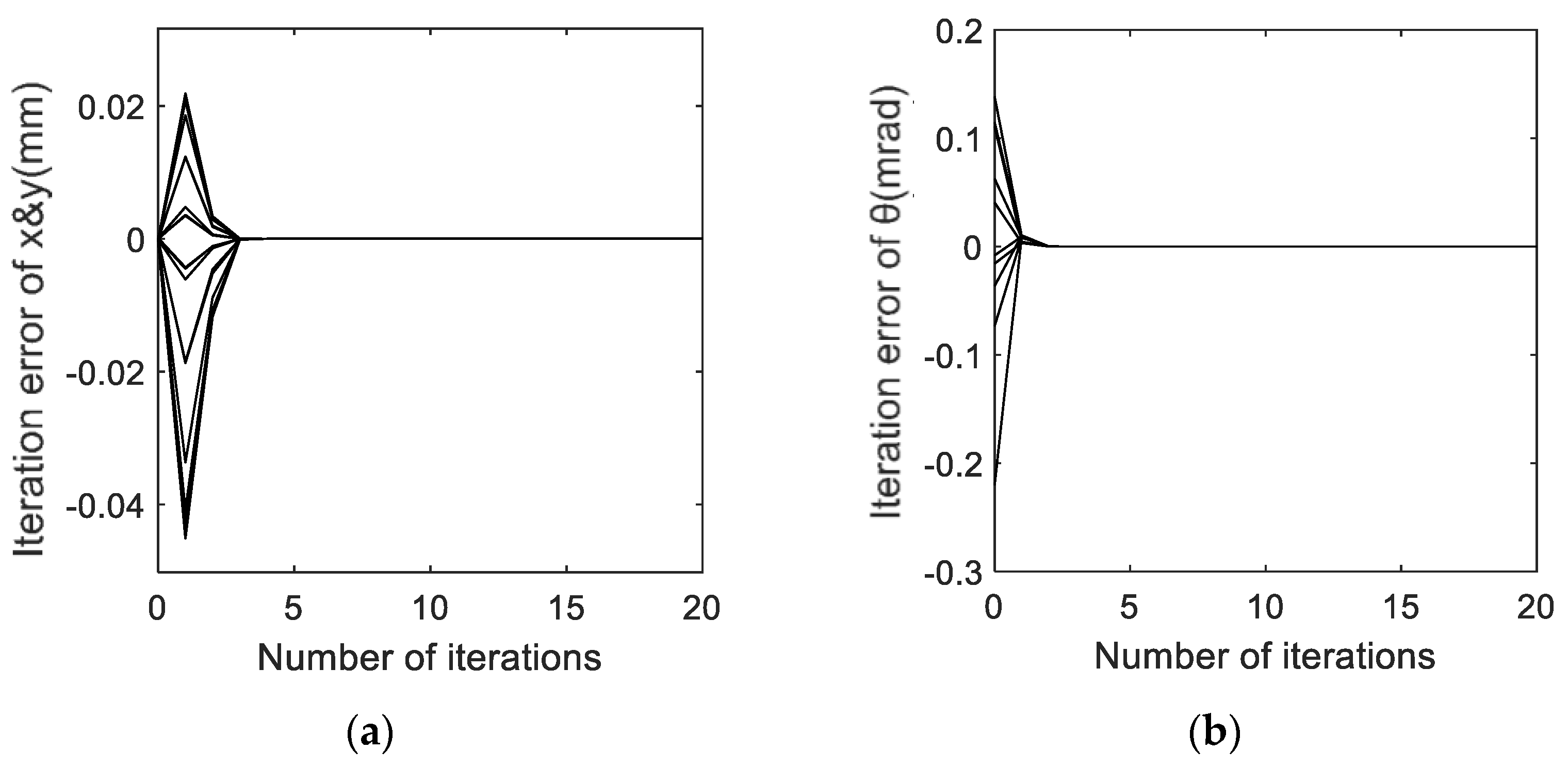
However, although there are improved algorithms such as the LM method and Newton method based on the MP inverse mentioned in [
21] for solving nonlinear equations with a singular Jacobi matrix, and since the solution of Equation (4) is not unique and the iteration varies with the initial iterate, there is still a deviation between the computation result of the 48 unknowns and their true value. As an illustration, the computation of solving Equation (4) with the Newton method is simulated: a set of true values of unknowns is given, and 10 different initial values are randomly generated. In contrast, the iterations of
and
using the 10 initial values are shown in
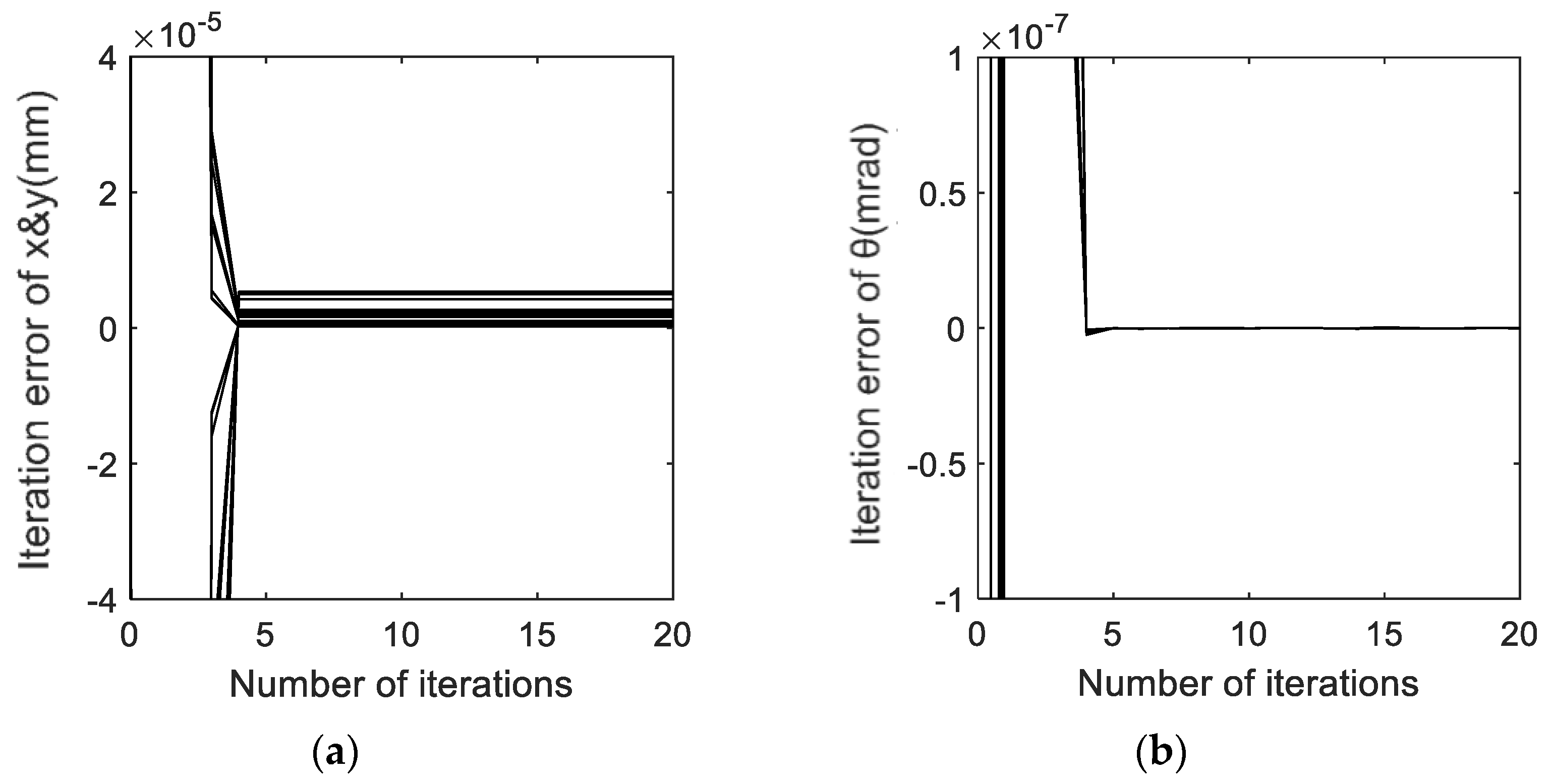
Figure 5. The detail of
Figure 5 is drawn as
Figure 6 to observe the convergence results.
From
Figure 5, the iterations of
and
both converge; however, from
Figure 6, the convergence of
changes with initial values. Hence, the convergence accuracy of
and
are different, which means that the accuracy of each component of the equation system solution is different. Since we only care about the solution of displacement
, can it be proven that all the displacement unknowns can be accurately solved? The answer is yes, and the proof is given in the following sections.
3.2. Solution Component Uniqueness Theory
As shown in
Figure 6, the convergence of each variable of the nonlinear equation system with a singular Jacobi matrix is different, which is proven to be related to the uniqueness of the solution component in this section. To prove the solvability of displacement in the interferometer measurement model, the solution component uniqueness theory is proposed.
Without loss of generality, consider the nonlinear equation system
where
,
is a continuously differentiable nonlinear function.
Equation (12) is said to be a singular nonlinear equation system (SNES) if it has a singular Jacobi matrix. Let be any one in the solution set of Equation (12), the solution component is said to be unique or with uniqueness if there is only one value for it, where .
Let
be the true value of the unknowns in Equation (12). If we look at the interferometer model (4),
is the true value of the 48 unknowns. Let
be the solution computed by any improved algorithm. For the case that Equation (12) is SNES, as mentioned in
Section 2,
varies with the initial iterate, and the solution of Equation (12) is a set with at least one dimension.
and
both belong to the solution set, but there is no evidence that
holds. The following Theorem 1 shows that the distance between
and
depends on the solution component uniqueness.
Theorem 1. For
,
holds if
is unique. Otherwise,
might not hold.
Proof. For the condition that is unique, there is only one value for the solution of . Since both and are the solution of (12), it is easy to check that holds. In contrast, for the condition that is not unique, there are two distinct solutions of (12) set as and with two distinct components set as and . Without loss of generality, suppose that and , then we have and , which indicate that holds. Thus, the proof is finished.
Theorem 1 implies that only for the solution component with uniqueness, the result computed by the algorithm always converges to the true value. Therefore, for the aim to solve the 30 displacement unknowns in Equation (4), the uniqueness of the corresponding 30 solution components must be verified. The following Theorem 2 provides the basis to help verify the solution component uniqueness.
Lemma 1. All the components of solution are unique if
has full column rank.
Proof. For the
with full column rank, it follows from the continuity of
that there exists the neighborhood of
as
with
such that
holds for all the
., i.e., for all the
,
has full column rank. Thus, it follows from the Newton method [
22] that
converges to the unique solution
. Therefore, all the components of
converge to the unique solution, the proof is finished.
Theorem 2. Let
where for
Then,
is not unique if rank holds. Otherwise,
is unique.
Proof. According to the definition of the Jacobi matrix, the total differential of (12) at is
If
holds, there is
where
.
Substituting Equation (14) into Equation (13), then we have
Substituting Equation (16) into Equation (15), there is
Taking (17) as the total differential of the equation system, where , for which the Jacobi matrix is .
Without loss of generality, suppose that
has full rank, otherwise we can repeat the above process to cut down the column elements. Then, it follows from Lemma 1 that all the solutions of
are unique. Let
be the unique solution of
, it follows from (16) that
holds, which is the linear equation system of
. Notice that the blanks in the matrix in (18) are all 0.
It is easy to check that in (18) has infinitely many solutions, which means is not unique. The proof of the first half of the statement is finished.
As for the other condition that , the discussion is divided into the following two cases: For the case that has full column rank, must have full column rank since its rank is larger than . Then, it follows from Lemma 1 that is unique. For the other case that has no full column rank, let after cutting down all the linearly dependent columns by taking the steps same as (14)–(17), where has full column rank and . Then, the new Jacobi matrix becomes which has full column rank. Hence, according to Lemma 1, is unique. The proof of the second half of the statement is finished.
From Theorem 2, the uniqueness of the solution component can be determined by computing whether the corresponding column in the Jacobi matrix is independent. Therefore, to verify the uniqueness of the displacement solution in the interferometer model, the columns dependence computation methods are discussed in the following.
Although there are Gaussian elimination, determinant computation, and other numerical algorithms used to compute the dependence of vectors [
23], since the numerical error exists in the Jacobi matrix computation, the dependence computation result might go wrong if the tolerance of the algorithms is improper (tolerance can only be selected according to empirical methods, without means of debugging or correction due to the lack of appropriate feedback). To make the dependence computation more accurate, a numerical algorithm for dependence computation based on principle component analysis (PCA) is proposed.
For the given Jacobi matrix
, normalizing by
The covariance matrix of
is
Computing the eigenvalue decomposition
where
is the eigenvector matrix with
,
is a diagonal matrix whose diagonal elements are eigenvalues in descending order.
According to PCA, after setting the threshold
and
with that
, we have
for dimensionality reduction of
, where
.
If
in
is strongly dependent, which indicates that it carries less information, we believe that it contributes less to
so that the weight of
in Equation (22) is smaller. Suppose that
,
, then the weight of
is
. Thus, taking the infinite norm of
as the independent factor (IDF), that is
There is since . The closer is to 0, which indicates that has weaker independence and stronger dependence in , it follows from Theorem 2 that is more likely to be not unique; on the contrary, with stronger independence and weaker dependence of , is more likely to be unique.
According to the above, the IDF shows the possibility of whether a solution component is unique. After computing the IDFs of all the vectors in the Jacobi matrix, some simple classification algorithms such as the k-nearest neighbor algorithm [
24] can be used to classify all the components into two categories according to the size of their IDFs, so as to determine the components’ uniqueness. A simple approach is setting a threshold
, there is
The brief process of the solution component uniqueness algorithm proposed above is summarized as follows.
So far, by using Theorem 1, Theorem 2, and Algorithm 1, it can be determined whether each unknown in the SNES can be solved accurately. Also, the solvability of the displacement in the interferometer model can be verified, which is discussed in the following
Section 3.3.
| Algorithm 1: Solution component uniqueness algorithm. |
| is a solution in the solution set of (12)
|
|
|
|
|
|
|
|
|
9: Compute the uniqueness of each component by Equation (24)
|
3.3. Principle of Displacement Computation
In this Subsection, the algorithm of the displacement computation of the interferometer measurement model is proposed, and the high accuracy of the displacement computation result is verified.
Since the classic Gauss–Newton method is not applicable to SNES, the Newton method with MP inverse is proposed to solve the displacement from the interferometer model (4). The linear expansion approximation of the equation system (12) at the given iteration
is
In the Newton method, the solution of
in (25) is taken as the next step
in the iteration. In the case that
is not a square matrix, the Gauss–Newton method solves
by multiplying Equation (25) by
, which fails when
is singular. In this paper, let Equation (25) be the inconsistent linear equation system of
, then the minimum 2-norm solution is
where
is the MP inverse of
which is calculated by singular value decomposition
where
satisfy
where
is the diagonal matrix, whose diagonal elements are singular values in descending order.
Therefore, according to Equation (26), the iteration formula is
The brief process of the proposed Newton method with MP inverse is summarized as follows.
Since the convergence of the Newton method with MP inverse is discussed [
22], Algorithm 2 can be used to solve the interferometer model (4). However, the solution component uniqueness needs to be verified.
| Algorithm 2: Newton method with MP inverse. |
|
|
|
| satisfy (28)
|
|
|
| 7: k = k +1
|
| 8: end while |
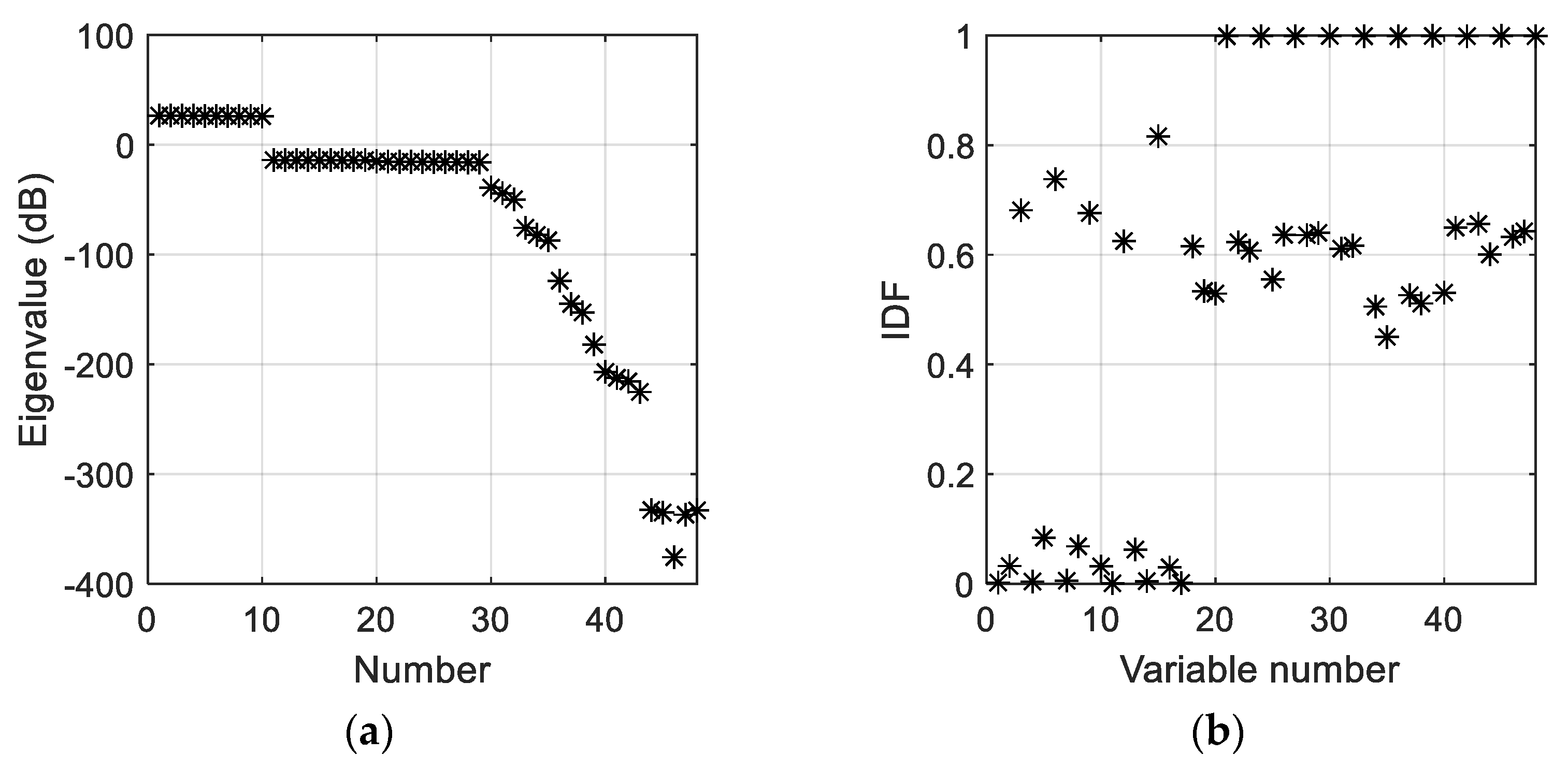
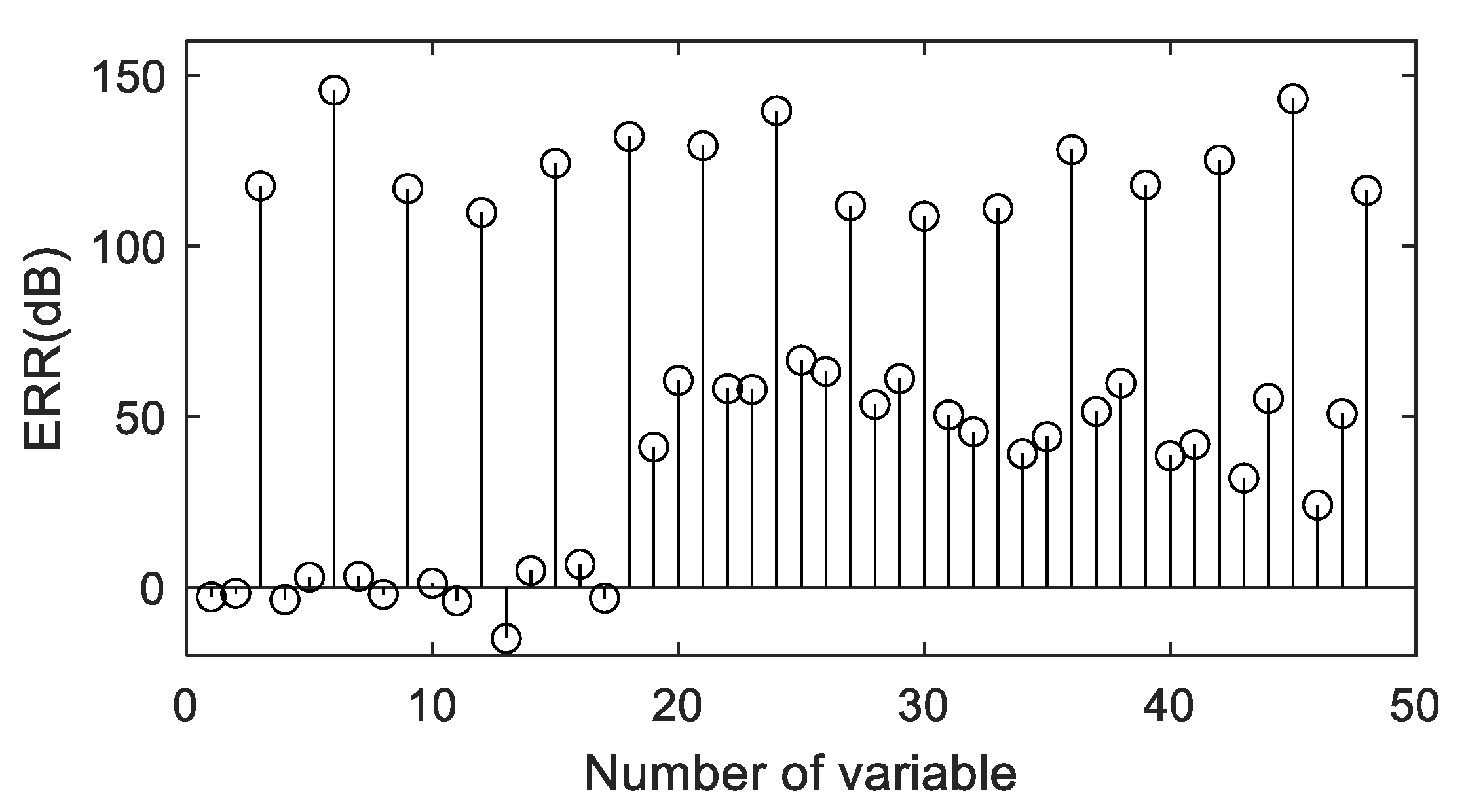
Algorithm 1 is used to compute the solution uniqueness of the 48 unknowns in Equation (4). Number the 48 unknowns as
Then, the eigenvalues
in Equation (21) are shown in
Figure 7a, and the IDFs of the 48 vectors in the Jacobi matrix are shown in
Figure 7b. It is easy to check from
Figure 7b that the IDF of the vectors whose numbers are 1, 2, 4, 5, 7, 8, 10, 11, 13, 14, 16, and 17 are much lower than the others. The corresponding solution components are not unique for the threshold, which is taken as
. Thus, the convergence results of these unknowns are not accurate, which means that the computation of the interferometers’ installation position
is not accurate. On the contrary, the other 36 unknowns, including the 3-DOF displacement, are solved with high accuracy. The solvability of the displacement in the interferometer model is proven.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}