
Development of Far-UVC-Based Surface Disinfection Prototype for Public Buses
 , , , ,
, , , ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Design of Far-UVC-based Disinfection System Prototype for Public Transport
2.2. Public Transport Disinfection Scenarios
2.2.1. Scenario 1
2.2.2. Scenario 2
2.2.3. Scenario 3
2.3. Energy Efficiency Evaluation Model
- The parameters of the electrical power supply network supplying the module remain constant over time.
- The module has two states: connected to the electrical power supply or disconnected from it.
- The module is passively cooled.
- The temperature of the UVC lamp is equal to the temperature of the glass bulb of the lamp.
- The temperature of the power supply of the module does not affect the light output of the UVC lamp.
- The temperature of the converter of the module does not affect the light output of the UVC lamp.
3. Results
4. Discussion
5. Conclusions
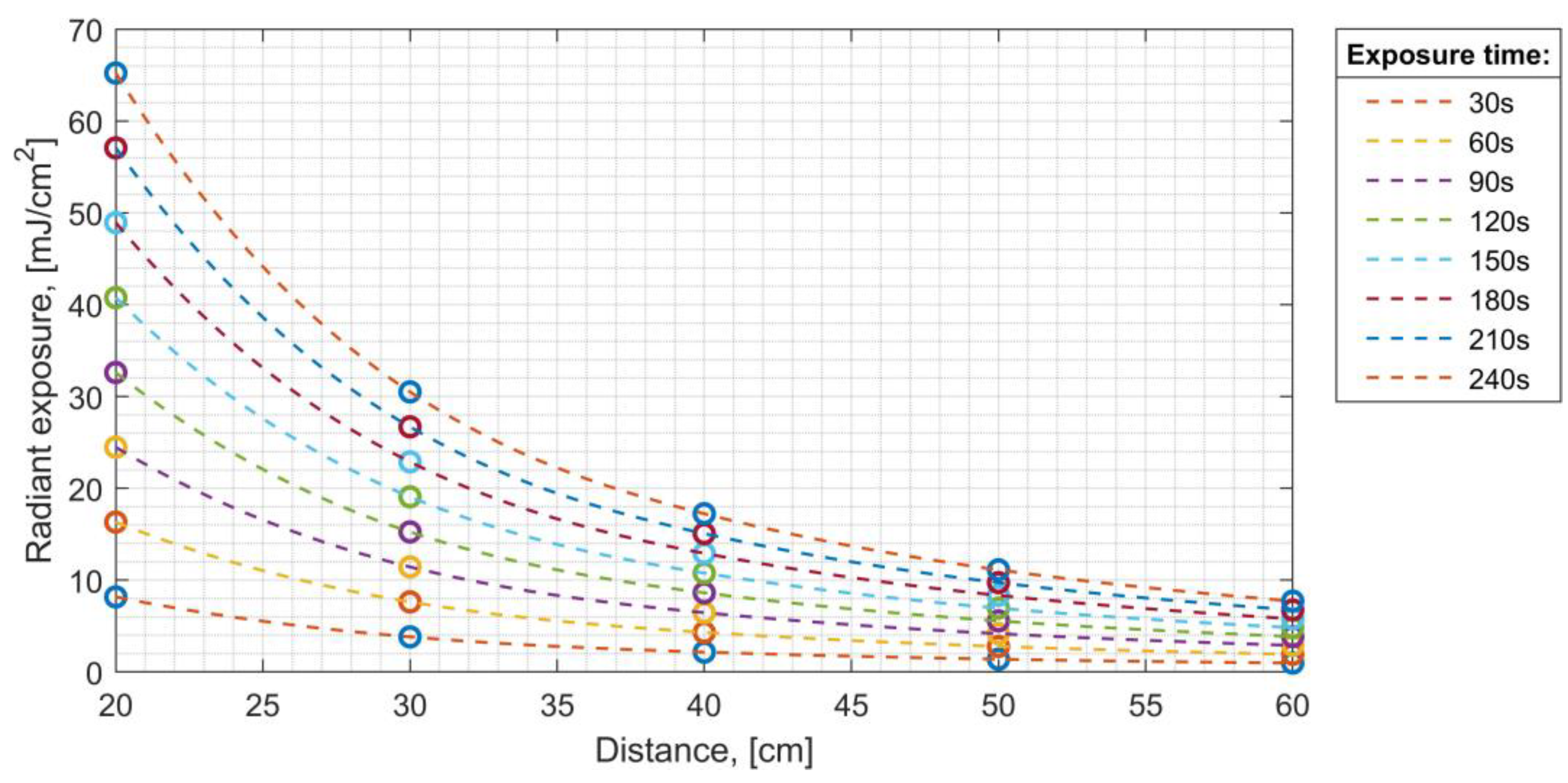
- A far-UVC based surface disinfection prototype for public buses was developed. The far-UVC light angle of the prototype was investigated, and a bus seat irradiation study was carried out in which the irradiances of individual zones were determined by evaluating both the distance between the light source and each surface to be disinfected and the disinfection time to achieve a minimum radiant exposure of 2 mJ/cm2.
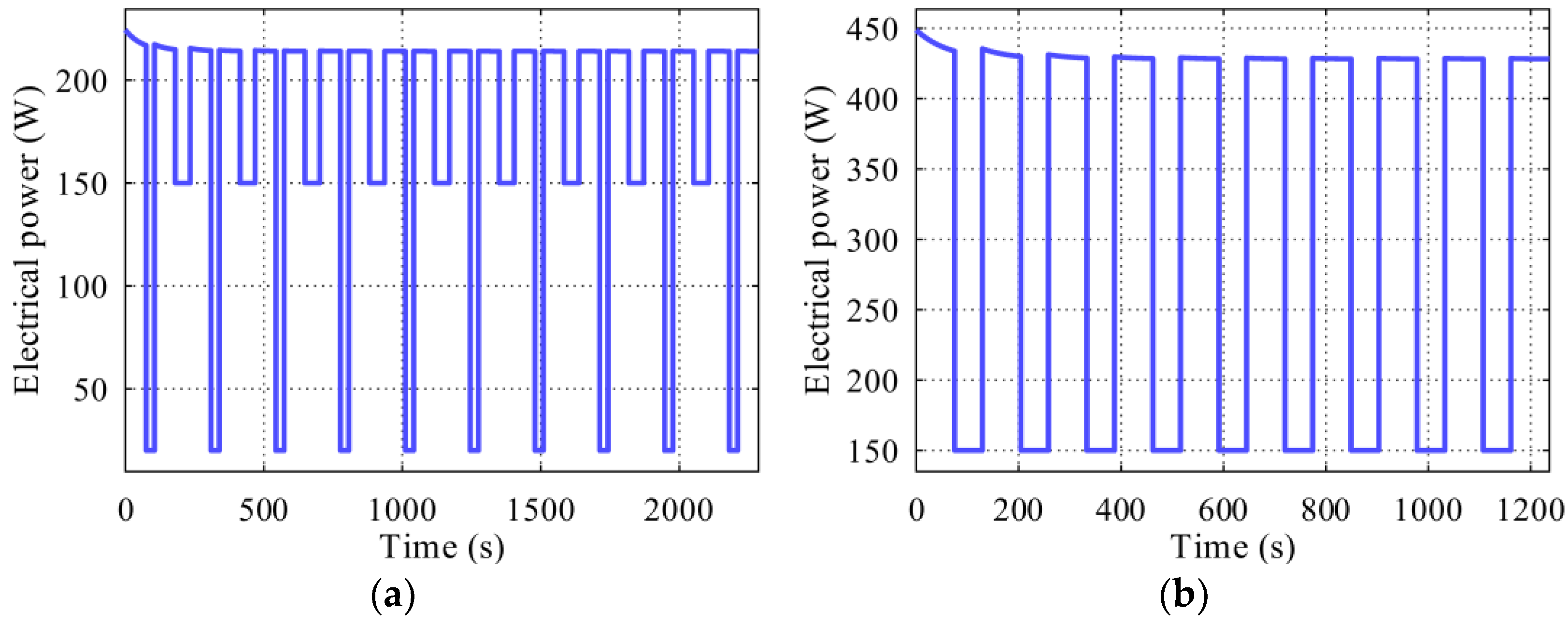
- An energy efficiency assessment model of a far-UVC-based disinfection module was proposed that allows the simulation of the instantaneous electrical energy demand during the disinfection process and can be used for energy consumption optimization and forecasting.
- Three disinfection scenarios were analyzed, focusing on bus zones, disinfection times, and electrical energy demands. It was found that placing the far-UVC light source in a fixed vertical position, 75 cm from the seat and 25 cm from the center of the backrest, satisfies the optimum disinfection time and energy requirements. The disinfection of an entire bus with two lamps per row takes 38.1 min (20.6 min with four lamps) and requires 111.3 Wh of energy (109.8 Wh with four lamps).
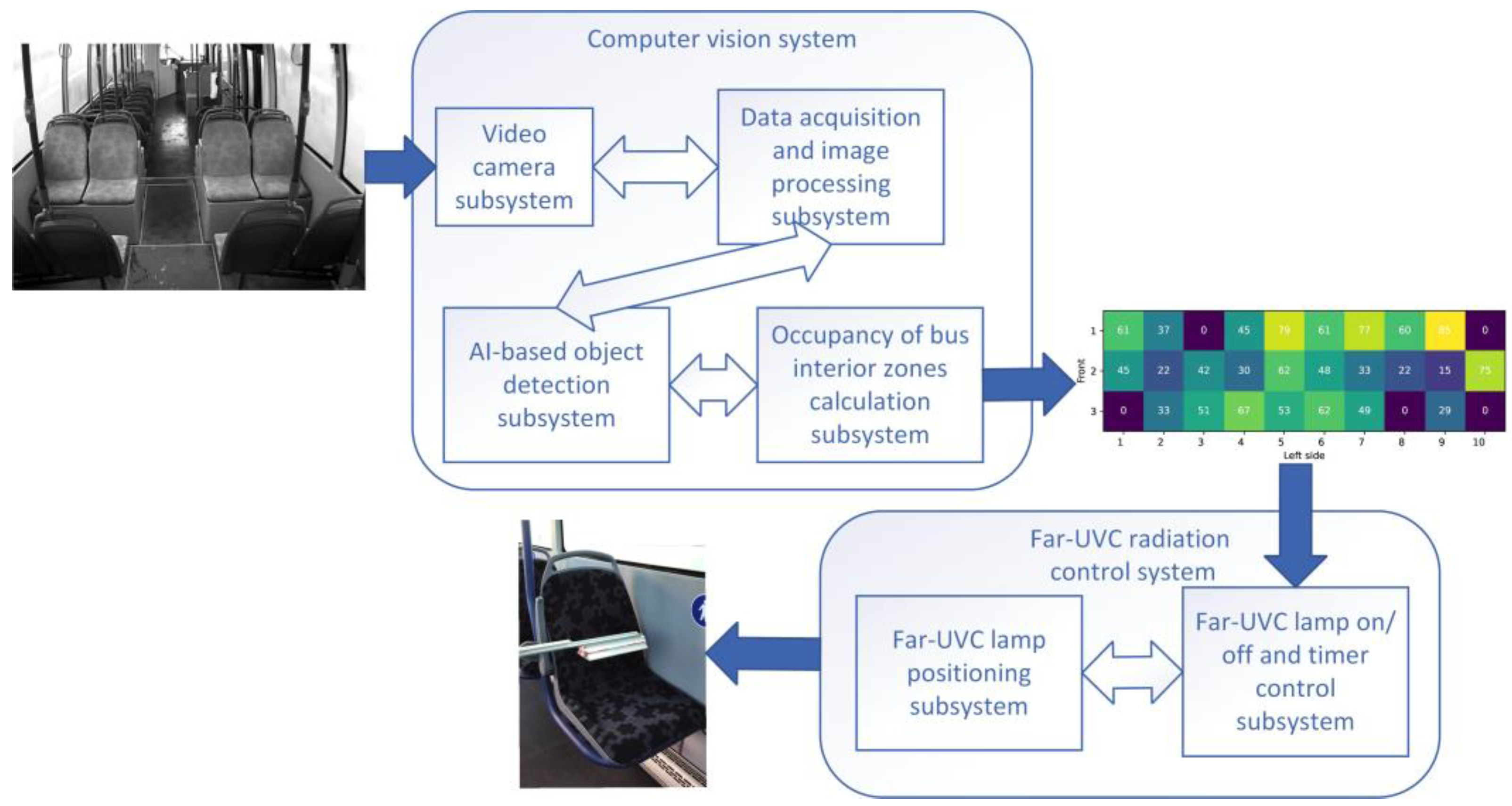
- A subsystem that enables the real-time monitoring of occupancy levels in different areas of public buses has been developed using the Yolo v7 passenger detection algorithm. By prioritizing the disinfection process in the most crowded and frequented areas, this subsystem increases the effectiveness of the disinfection process in a bus interior.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Moreno, T.; Pintó, R.M.; Bosch, A.; Moreno, N.; Alastuey, A.; Minguillón, M.C.; Anfruns-Estrada, E.; Guix, S.; Fuentes, C.; Buonanno, G.; et al. Tracing Surface and Airborne SARS-CoV-2 RNA inside Public Buses and Subway Trains. Environ. Int. 2021, 147, 106326. [Google Scholar] [CrossRef]
- Bertone, M.; Mikszewski, A.; Stabile, L.; Riccio, G.; Cortellessa, G.; d’Ambrosio, F.R.; Papa, V.; Morawska, L.; Buonanno, G. Assessment of SARS-CoV-2 Airborne Infection Transmission Risk in Public Buses. Geosci. Front. 2022, 13, 101398. [Google Scholar] [CrossRef]
- Elgujja, A.A.; Altalhi, H.H.; Ezreqat, S. Review of the Efficacy of Ultraviolet C for Surface Decontamination. J. Nat. Sci. Med. 2020, 3, 8. [Google Scholar] [CrossRef]
- Su, W.-L.; Lin, C.-P.; Huang, H.-C.; Wu, Y.-K.; Yang, M.-C.; Chiu, S.-K.; Peng, M.-Y.; Chan, M.-C.; Chao, Y.-C. Clinical Application of 222 Nm Wavelength Ultraviolet C Irradiation on SARS CoV-2 Contaminated Environments. J. Microbiol. Immunol. Infect. 2022, 55, 166–169. [Google Scholar] [CrossRef] [PubMed]
- Matsuura, R.; Lo, C.-W.; Ogawa, T.; Nakagawa, M.; Takei, M.; Matsumoto, Y.; Wada, S.; Aida, Y. Comparison of the Inactivation Capacity of Various UV Wavelengths on SARS-CoV-2. Biochem. Biophys. Rep. 2022, 32, 101379. [Google Scholar] [CrossRef]
- Kitagawa, H.; Nomura, T.; Nazmul, T.; Omori, K.; Shigemoto, N.; Sakaguchi, T.; Ohge, H. Effectiveness of 222-Nm Ultraviolet Light on Disinfecting SARS-CoV-2 Surface Contamination. Am. J. Infect. Control. 2021, 49, 299–301. [Google Scholar] [CrossRef]
- Buonanno, M.; Welch, D.; Shuryak, I.; Brenner, D.J. Far-UVC Light (222 Nm) Efficiently and Safely Inactivates Airborne Human Coronaviruses. Sci Rep 2020, 10, 10285. [Google Scholar] [CrossRef]
- Pereira, A.R.; Braga, D.F.O.; Vassal, M.; Gomes, I.B.; Simões, M. Ultraviolet C Irradiation: A Promising Approach for the Disinfection of Public Spaces? Sci. Total Environ. 2023, 879, 163007. [Google Scholar] [CrossRef]
- Sesti-Costa, R.; Negrão, C.; von, Z.; Shimizu, J.F.; Nagai, A.; Tavares, R.S.N.; Adamoski, D.; Costa, W.; Fontoura, M.A.; da Silva, T.J.; et al. UV 254 Nm Is More Efficient than UV 222 Nm in Inactivating SARS-CoV-2 Present in Human Saliva. Photodiagnosis Photodyn. Ther. 2022, 39, 103015. [Google Scholar] [CrossRef]
- Ramos, C.C.R.; Roque, J.L.A.; Sarmiento, D.B.; Suarez, L.E.G.; Sunio, J.T.P.; Tabungar, K.I.B.; Tengco, G.S.C.; Rio, P.C.; Hilario, A.L. Use of Ultraviolet-C in Environmental Sterilization in Hospitals: A Systematic Review on Efficacy and Safety. Int J Health Sci (Qassim) 2020, 14, 52–65. [Google Scholar]
- Mehta, I.; Hsueh, H.-Y.; Taghipour, S.; Li, W.; Saeedi, S. UV Disinfection Robots: A Review. Robot. Auton. Syst. 2023, 161, 104332. [Google Scholar] [CrossRef] [PubMed]
- Holland, J.; Kingston, L.; McCarthy, C.; Armstrong, E.; O’Dwyer, P.; Merz, F.; McConnell, M. Service Robots in the Healthcare Sector. Robot. 2021, 10, 47. [Google Scholar] [CrossRef]
- Begić, A. Application of Service Robots for Disinfection in Medical Institutions. Adv. Technol. Syst. Appl. II 2017, 28, 1056–1065. [Google Scholar] [CrossRef]
- Mahida, N.; Vaughan, N.; Boswell, T. First UK Evaluation of an Automated Ultraviolet-C Room Decontamination Device (Tru-DTM). J Hosp Infect 2013, 84, 332–335. [Google Scholar] [CrossRef] [PubMed]
- Astrid, F.; Beata, Z.; Van den Nest, M.; Julia, E.; Elisabeth, P.; Magda, D.-E. The Use of a UV-C Disinfection Robot in the Routine Cleaning Process: A Field Study in an Academic Hospital. Antimicrob. Resist. Infect. Control. 2021, 10, 84. [Google Scholar] [CrossRef]
- Vincent, R.L.; Rudnick, S.N.; McDevitt, J.J.; Wallach, F.R. Toward a Test Protocol for Surface Decontamination Using a Mobile Whole-Room UVGI Device†. Photochem. Photobiol. 2021, 97, 552–559. [Google Scholar] [CrossRef]
- Conte, D.; Leamy, S.; Furukawa, T. Design and Map-Based Teleoperation of a Robot for Disinfection of COVID-19 in Complex Indoor Environments. In Proceedings of the 2020 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Abu Dhabi, UAE, 4–6 November 2020; pp. 276–282. [Google Scholar]
- UVC-PURGE: A Novel Cost-Effective Disinfection Robot for Combating COVID-19 Pandemic | IEEE Journals & Magazine | IEEE Xplore. Available online: https://ieeexplore.ieee.org/document/9745041 (accessed on 6 June 2023).
- Mohammadi, A.; Kucharski, A.; Rawashdeh, N. UVC and Far-UVC Light Disinfection Ground Robot Design for Sterilizing the Coronavirus on Vertical Surfaces. Sensors 2022, 12115. [Google Scholar] [CrossRef]
- Mehta, I.; Hsueh, H.-Y.; Kourtzanidis, N.; Brylka, M.; Saeedi, S. Far-UVC Disinfection with Robotic Mobile Manipulator. In Proceedings of the 2022 International Symposium on Medical Robotics (ISMR), Atlanta, GA, USA, 13–15 April 2022; pp. 1–8. [Google Scholar] [CrossRef]
- Camacho, E.C.; Ospina, N.I.; Calderón, J.M. COVID-Bot: UV-C Based Autonomous Sanitizing Robotic Platform for COVID-19. IFAC-Pap. 2021, 54, 317–322. [Google Scholar] [CrossRef]
- Ma, Y.; Xi, N.; Xue, Y.; Wang, S.; Wang, Q.; Gu, Y. Development of a UVC-Based Disinfection Robot. Ind. Robot. Int. J. Robot. Res. Appl. 2022, 49, 913–923. [Google Scholar] [CrossRef]
- Segmenting Areas of Potential Contamination for Adaptive Robotic Disinfection in Built Environments - PMC. Available online: https://www.ncbi.nlm.nih.gov/pmc/articles/PMC7448966/ (accessed on 6 June 2023).
- Wang, S.; Li, Y.; Ding, G.; Li, C.; Zhao, Q.; Sun, B.; Song, Q. Design of UVC Surface Disinfection Robot with Coverage Path Planning Using Map-Based Approach At-The-Edge. Robotics 2022, 11, 117. [Google Scholar] [CrossRef]
- Recognizing Object Surface Materials to Adapt Robotic Disinfection in Infrastructure Facilities - Hu - 2022 - Computer-Aided Civil and Infrastructure Engineering - Wiley Online Library. Available online: https://onlinelibrary.wiley.com/doi/full/10.1111/mice.12811 (accessed on 6 June 2023).
- Yates, S.F.; Isella, G.; Rahislic, E.; Barbour, S.; Tiznado, L. Effects of Ultraviolet-C Radiation Exposure on Aircraft Cabin Materials. J. RES. NATL. INST. STAN. 2021, 126, 126019. [Google Scholar] [CrossRef]
- Drungilas, D.; Kurmis, M.; Tadzijevas, A.; Lukosius, Z.; Martinkenas, A.; Didziokas, R.; Gruode, J.; Sapalas, D.; Jankunas, V. Evaluating the Impact of 222 Nm Far-UVC Radiation on the Aesthetic and Mechanical Properties of Materials Used in Public Bus Interiors. Appl. Sci. 2023, 13, 4141. [Google Scholar] [CrossRef]
- Wang, C.-Y.; Bochkovskiy, A.; Liao, H.-Y.M. YOLOv7: Trainable Bag-of-Freebies Sets New State-of-the-Art for Real-Time Object Detectors. arxiv 2022, arXiv:2207.02696. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scheme | UV Wavelength | Objective | Findings |
|---|---|---|---|
| Tru-D™ room disinfection device [14]. | Not specified | Assess the efficacy of a Tru-D UVC room decontamination device | The successful eradication of organisms in an unoccupied operating theatre was accomplished. |
| UV-C Disinfection Robot Field Study [15] | 254 nm | Evaluate the effectiveness and usability of a UVC disinfection robot in hospital setting | The robot was not found suitable for integration into hospital’s cleaning procedures; it had an insufficient UVC irradiation cycle for pathogens with enhanced environmental resilience; it was effective in reducing the microbial burden on hospital surfaces. |
| Whole-Room UVGI Device [16] | 254 nm | Investigate the effectiveness of whole-room UVGI devices in controlling surface-borne pathogens | Bacillus atrophaeus spores serve as suitable model organisms for testing the influence of shadows on the inactivation efficacy of mobile whole-room UVGI devices. |
| COVID-19 Disinfection Robot [17] | 254 nm | Develop a robot specifically designed for disinfecting COVID-19 in complex indoor settings | The robot incorporates UVC lamps, features a six-degree-of-freedom arm and a wheeled platform, has a method for calculating surface dosage and creating a disinfection map, and showed successful testing results in a representative indoor environment. |
| UVC-PURGE Robot [18] | 254 nm | Evaluate the performance of the UVC-PURGE robot in combating COVID-19 | The robot effectively disinfects surfaces, destroys SARS-CoV-2 virus, and demonstrates navigational capabilities; it is highly usable and cost-effective compared to other UVC disinfection robots. |
| UVC and far-UVC light disinfection ground robot [19] | 222 nm and 254 nm | Investigate the feasibility and effectiveness of using autonomous mobile robots equipped with 254 nm UVC and 222 nm far-UVC light towers | The study demonstrated the feasibility and promising disinfection performance of autonomous mobile robots equipped with UV light towers using 254 nm UVC and 222 nm far-UVC lights, effectively sterilizing the coronavirus on irradiated surfaces, eliminating the need for space evacuation during the disinfection process. |
| Far-UVC Disinfection with Robotic Mobile Manipulator [20] | 222 nm | Introduce a cost-effective germicidal system that utilizes Ultraviolet Germicidal Irradiation (UVGI) to disinfect high contact surfaces and combat infectious disease agents such as viruses, bacteria, and fungi | The G-robot, which is a human-safe mobile manipulator for UV disinfection, was presented, and it demonstrated its efficacy in terms of dosage distribution, energy consumption, and real-world application. The G-robot is able to be used in a human presence, and it shows its improved disinfection effectiveness in cluttered and shadowed spaces. |
| COVID-Bot Autonomous Sanitizing Robot [21] | Not specified | Introduce an autonomous sanitizing robotic platform utilizing UVC radiation | The COVID-Bot effectively disinfects surfaces using UVC radiation; it operates autonomously and covers significant surface area in approximately 8 min. |
| UVC-Based Disinfection Robot [22] | Not specified | Develop a UVC-based disinfection robot with mobile platform and six-axis robotic arm | The robot emphasizes remote control, path planning, data monitoring, and the customization of disinfection functions. |
| Other Studies [23,24,25] | Not specified, 254 nm | Assess the performance, efficiency, and safety of UVC disinfection robots; optimize design and functionality | Efforts to enhance the mobility, navigation capabilities, and integration of advanced sensors and AI algorithms. |
| Scenario 1 | Scenario 2 | Scenario 3 | |
|---|---|---|---|
| Time to reach 2 mJ/cm2 at measurement point 1 | 75 s | 56 s | 64 s |
| Time to reach 2 mJ/cm2 at measurement point 2 | 32 s | 51 s | 35 s |
| Time to reach 2 mJ/cm2 at measurement point 3 | 56 s | 38 s | 72 s |
| Row disinfection time using 4 lamps per row | 75 s | 190 s | 72 s |
| Row disinfection time using 2 lamps per row | 180 s | 410 s | 174 s |
| Bus disinfection time using 4 lamps per row | 1236 s | 2366 s | 1479 s |
| Bus disinfection time using 2 lamps per row | 2286 s | 4142 s | 2232 s |
| Total energy consumption using 4 lamps per row | 109.8 Wh | 195.9 Wh | 112.3 Wh |
| Total energy consumption using 2 lamps per row | 111.3 Wh | 197.4 Wh | 116.1 Wh |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Drungilas, D.; Kurmis, M.; Tadzijevas, A.; Lukosius, Z.; Sapalas, D.; Jankunas, V.; Martinkenas, A.; Didziokas, R.; Gruode, J. Development of Far-UVC-Based Surface Disinfection Prototype for Public Buses. Appl. Sci. 2023, 13, 8501. https://doi.org/10.3390/app13148501
Drungilas D, Kurmis M, Tadzijevas A, Lukosius Z, Sapalas D, Jankunas V, Martinkenas A, Didziokas R, Gruode J. Development of Far-UVC-Based Surface Disinfection Prototype for Public Buses. Applied Sciences. 2023; 13(14):8501. https://doi.org/10.3390/app13148501
Chicago/Turabian StyleDrungilas, Darius, Mindaugas Kurmis, Arturas Tadzijevas, Zydrunas Lukosius, Deivydas Sapalas, Valdas Jankunas, Arvydas Martinkenas, Rimantas Didziokas, and Jurate Gruode. 2023. "Development of Far-UVC-Based Surface Disinfection Prototype for Public Buses" Applied Sciences 13, no. 14: 8501. https://doi.org/10.3390/app13148501