
Evaluation of YOLO Object Detectors for Weed Detection in Different Turfgrass Scenarios

 ,
,  , , and
, , and 
Abstract
:1. Introduction
2. Materials and Methods
2.1. YOLO and YOLOv5, YOLOv6, YOLOv7, YOLOv8 Detectors

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Parameters (Millions) | GFlops a | Year | AP (%) b | Repository | Reference |
|---|---|---|---|---|---|---|
| YOLOv5n | 1.8 | 4.2 | 2020 | 55.8 | https://github.com/ultralytics/YOLOv5 (accessed on 2 July 2023) | [33] |
| YOLOv5s | 7.1 | 16.5 | ||||
| YOLOv5m | 20.9 | 48.2 | ||||
| YOLOv5l | 46.1 | 108.2 | ||||
| YOLOv5x | 86.2 | 204.6 | ||||
| YOLOv6n | 4.3 | 11.1 | 2022 | 52.5 | https://github.com/meituan/YOLOv6 (accessed on 2 July 2023) | [34] |
| YOLOv6s | 17.2 | 44.2 | ||||
| YOLOv6m | 34.3 | 82.2 | ||||
| YOLOv6l | 58.5 | 144.0 | ||||
| YOLOv7 | 37.2 | 105.1 | 2022 | 56.8 | https://github.com/WongKinYiu/yolov7 (accessed on 2 July 2023) | [35] |
| YOLOv7x | 70.8 | 188.9 | ||||
| YOLOv8n | 3.0 | 8.2 | 2023 | 53.9 | https://github.com/ultralytics/ultralytics (accessed on 2 July 2023) | - |
| YOLOv8s | 11.2 | 28.6 | ||||
| YOLOv8m | 25.9 | 79.1 | ||||
| YOLOv8l | 43.6 | 165.4 | ||||
| YOLOv8x | 68.2 | 258.1 |
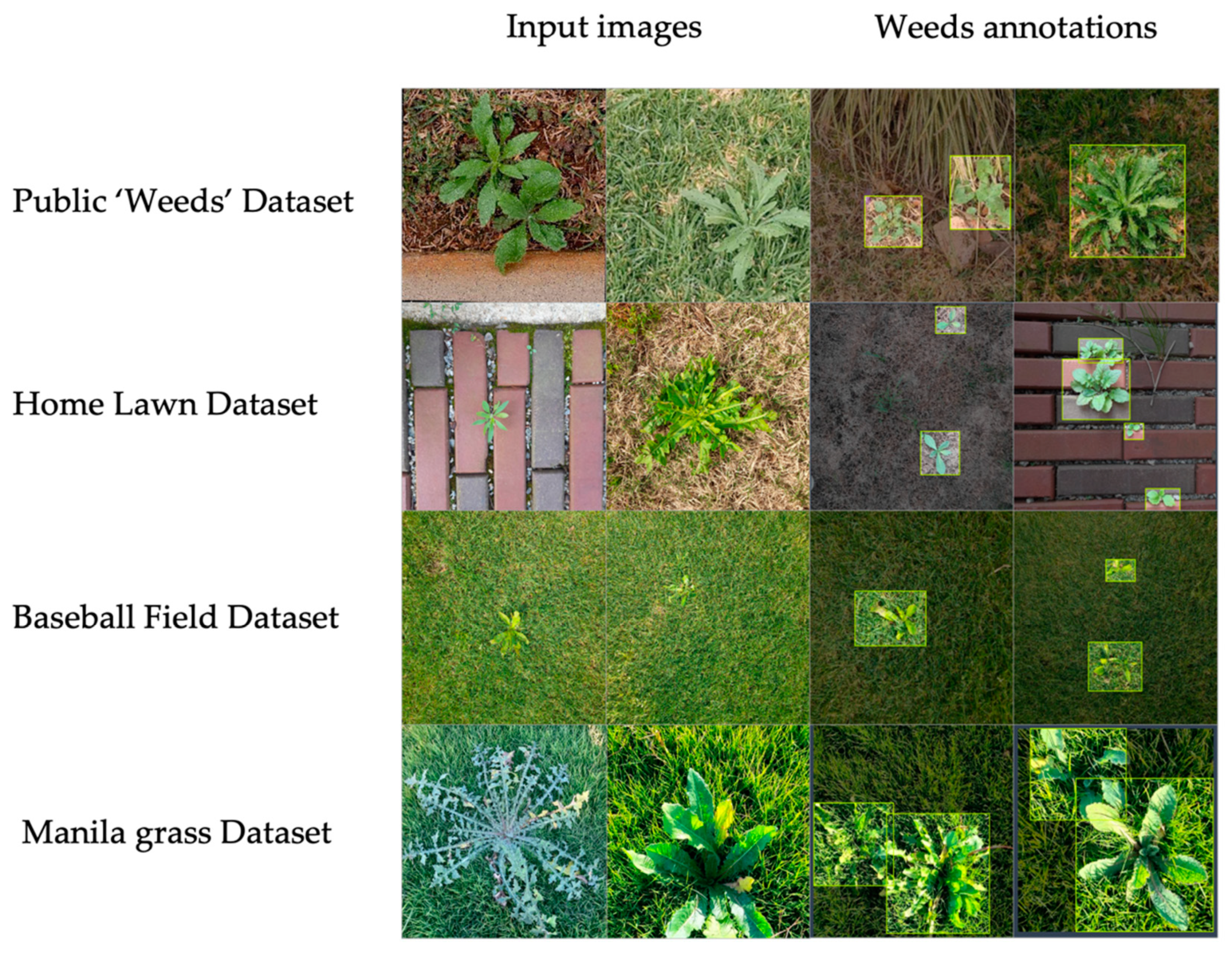
2.2. Datasets Description and Preparation
2.2.1. The ‘Weeds’ Public Dataset
2.2.2. Additional Test Datasets
2.3. Metrics
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
| Model | Dataset | TP | FP | FN | TN |
|---|---|---|---|---|---|
| EfficientDet | ‘Weeds’ public | 412 | 39 | 46 | 0 |
| Home Lawn | 164 | 117 | 161 | 0 | |
| Baseball Field | 154 | 95 | 63 | 0 | |
| Manila grass | 95 | 61 | 41 | 0 | |
| YOLOv5m | ‘Weeds’ public | 492 | 31 | 26 | 0 |
| Home Lawn | 222 | 127 | 199 | 0 | |
| Baseball Field | 139 | 63 | 56 | 0 | |
| Manila grass | 103 | 56 | 89 | 0 | |
| YOLOv6l | ‘Weeds’ public | 478 | 28 | 31 | 0 |
| Home Lawn | 226 | 63 | 126 | 0 | |
| Baseball Field | 187 | 81 | 72 | 0 | |
| Manila grass | 138 | 101 | 49 | 0 | |
| YOLOv7 | ‘Weeds’ public | 482 | 39 | 18 | 0 |
| Home Lawn | 250 | 101 | 136 | 0 | |
| Baseball Field | 175 | 106 | 58 | 0 | |
| Manila grass | 191 | 101 | 58 | 0 | |
| YOLOv8l | ‘Weeds’ public | 499 | 31 | 23 | 0 |
| Home Lawn | 243 | 132 | 138 | 0 | |
| Baseball Field | 198 | 101 | 114 | 0 | |
| Manila grass | 178 | 55 | 99 | 0 |
References
- McElroy, J.S.; Martins, D. Use of Herbicides on Turfgrass. Planta Daninha 2013, 31, 455–467. [Google Scholar] [CrossRef] [Green Version]
- Karabelas, A.J.; Plakas, K.V.; Solomou, E.S.; Drossou, V.; Sarigiannis, D.A. Impact of European Legislation on Marketed Pesticides—A View from the Standpoint of Health Impact Assessment Studies. Environ. Int. 2009, 35, 1096–1107. [Google Scholar] [CrossRef]
- Stoate, C.; Báldi, A.; Beja, P.; Boatman, N.D.; Herzon, I.; van Doorn, A.; de Snoo, G.R.; Rakosy, L.; Ramwell, C. Ecological Impacts of Early 21st Century Agricultural Change in Europe—A Review. J. Environ. Manag. 2009, 91, 22–46. [Google Scholar] [CrossRef]
- European Commission. EU Pesticides Database 2022. Available online: https://food.ec.europa.eu/plants/pesticides/eu-pesticides-database_en (accessed on 2 July 2023).
- Hahn, D.; Sallenave, R.; Pornaro, C.; Leinauer, B. Managing Cool-Season Turfgrass without Herbicides: Optimizing Maintenance Practices to Control Weeds. Crop Sci. 2020, 60, 2204–2220. [Google Scholar] [CrossRef] [Green Version]
- Martelloni, L.; Frasconi, C.; Sportelli, M.; Fontanelli, M.; Raffaelli, M.; Peruzzi, A. Flaming, Glyphosate, Hot Foam and Nonanoic Acid for Weed Control: A Comparison. Agronomy 2020, 10, 129. [Google Scholar] [CrossRef] [Green Version]
- Jin, X.; McCullough, P.E.; Liu, T.; Yang, D.; Zhu, W.; Chen, Y.; Yu, J. A Smart Sprayer for Weed Control in Bermudagrass Turf Based on the Herbicide Weed Control Spectrum. Crop Prot. 2023, 170, 106270. [Google Scholar] [CrossRef]
- Jin, X.; Bagavathiannan, M.; Maity, A.; Chen, Y.; Yu, J. Deep Learning for Detecting Herbicide Weed Control Spectrum in Turfgrass. Plant Methods 2022, 18, 94. [Google Scholar] [CrossRef]
- Jin, X.; Liu, T.; McCullough, P.E.; Chen, Y.; Yu, J. Evaluation of Convolutional Neural Networks for Herbicide Susceptibility-Based Weed Detection in Turf. Front. Plant Sci. 2023, 14, 1096802. [Google Scholar] [CrossRef]
- Watchareeruetai, U.; Takeuchi, Y.; Matsumoto, T.; Kudo, H.; Ohnishi, N. Computer Vision Based Methods for Detecting Weeds in Lawns. In Proceedings of the 2006 IEEE Conference on Cybernetics and Intelligent Systems, Bangkok, Thailand, 7–9 June 2006; Volume 1. [Google Scholar] [CrossRef]
- Weis, M.; Rumpf, T.; Gerhards, R.; Plümer, L. Comparison of Different Classification Algorithms for Weed Detection from Images Based on Shape Parameters. Bornimer Agrar. Ber. 2009, 69, 53–64. [Google Scholar]
- Gebhardt, S.; Schellberg, J.; Lock, R.; Kühbauch, W. Identification of Broad-Leaved Dock (Rumex obtusifolius L.) on Grassland by Means of Digital Image Processing. Precis. Agric. 2006, 7, 165–178. [Google Scholar] [CrossRef]
- Gebhardt, S.; Kühbauch, W. A New Algorithm for Automatic Rumex Obtusifolius Detection in Digital Images Using Colour and Texture Features and the Influence of Image Resolution. Precis. Agric. 2007, 8, 1–13. [Google Scholar] [CrossRef]
- Parra, L.; Marin, J.; Yousfi, S.; Rincón, G.; Mauri, P.V.; Lloret, J. Edge Detection for Weed Recognition in Lawns. Comput. Electron. Agric. 2020, 176, 105684. [Google Scholar] [CrossRef]
- Gu, J.; Wang, Z.; Kuen, J.; Ma, L.; Shahroudy, A.; Shuai, B.; Liu, T.; Wang, X.; Wang, G.; Cai, J.; et al. Recent Advances in Convolutional Neural Networks. Pattern Recognit. 2018, 77, 354–377. [Google Scholar] [CrossRef] [Green Version]
- Lecun, Y.; Bengio, Y.; Hinton, G. Deep Learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Coleman, G.R.Y.; Bender, A.; Hu, K.; Sharpe, S.M.; Schumann, A.W.; Wang, Z.; Bagavathiannan, M.V.; Boyd, N.S.; Walsh, M.J. Weed Detection to Weed Recognition: Reviewing 50 Years of Research to Identify Constraints and Opportunities for Large-Scale Cropping Systems. Weed Technol. 2022, 36, 741–757. [Google Scholar] [CrossRef]
- Yu, J.; Sharpe, S.M.; Schumann, A.W.; Boyd, N.S. Deep Learning for Image-Based Weed Detection in Turfgrass. Eur. J. Agron. 2019, 104, 78–84. [Google Scholar] [CrossRef]
- Yu, J.; Sharpe, S.M.; Schumann, A.W.; Boyd, N.S. Detection of Broadleaf Weeds Growing in Turfgrass with Convolutional Neural Networks. Pest Manag. Sci. 2019, 75, 2211–2218. [Google Scholar] [CrossRef]
- Yu, J.; Schumann, A.W.; Cao, Z.; Sharpe, S.M.; Boyd, N.S. Weed Detection in Perennial Ryegrass with Deep Learning Convolutional Neural Network. Front. Plant Sci. 2019, 10, 1422. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jin, X.; Bagavathiannan, M.; McCullough, P.E.; Chen, Y.; Yu, J. A Deep Learning-Based Method for Classification, Detection, and Localization of Weeds in Turfgrass. Pest Manag. Sci. 2022, 78, 4809–4821. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar] [CrossRef] [Green Version]
- Everingham, M.; Eslami, S.M.A.; Van Gool, L.; Williams, C.K.I.; Winn, J.; Zisserman, A. The Pascal Visual Object Classes Challenge: A Retrospective. Int. J. Comput. Vis. 2015, 111, 98–136. [Google Scholar] [CrossRef]
- Lin, T.-Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft COCO: Common Objects in Context BT—Computer Vision—ECCV 2014; Fleet, D., Pajdla, T., Schiele, B., Tuytelaars, T., Eds.; Springer International Publishing: Cham, Germany, 2014; pp. 740–755. [Google Scholar]
- Dang, F.; Chen, D.; Lu, Y.; Li, Z. Yoloweeds: A Novel Benchmark of Yolo Object Detectors for Multi-Class Weed Detection in Cotton Production Systems. Comput. Electron. Agric. 2023, 205, 107655. [Google Scholar] [CrossRef]
- Ying, B.; Xu, Y.; Zhang, S.; Shi, Y.; Liu, L. Traitement Du Signal Weed Detection in Images of Carrot Fields Based on Improved YOLO V4. Trait. Du Signal 2021, 38, 341–348. [Google Scholar] [CrossRef]
- Chen, J.; Wang, H.; Zhang, H.; Luo, T.; Wei, D.; Long, T.; Wang, Z. Weed Detection in Sesame Fields Using a YOLO Model with an Enhanced Attention Mechanism and Feature Fusion. Comput. Electron. Agric. 2022, 202, 107412. [Google Scholar] [CrossRef]
- Zhuang, J.; Jin, X.; Chen, Y.; Meng, W.; Wang, Y.; Yu, J.; Muthukumar, B. Drought Stress Impact on the Performance of Deep Convolutional Neural Networks for Weed Detection in Bahiagrass. Grass Forage Sci. 2023, 78, 214–223. [Google Scholar] [CrossRef]
- Medrano, R. Feasibility of Real-Time Weed Detection in Turfgrass on an Edge Device. Master’s Thesis, California State Univeristy, Camarillo, CA, USA, 2021. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, Faster, Stronger. In Proceedings of the 30th IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 6517–6525. [Google Scholar] [CrossRef] [Green Version]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Bochkovskiy, A.; Wang, C.-Y.; Liao, H.-Y.M. YOLOv4: Optimal Speed and Accuracy of Object Detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Jocher, G. Ultralytics/Yolov5: v3.1—Bug Fixes and Performance Improvements. Zenodo 2020. Available online: https://zenodo.org/record/4154370 (accessed on 2 July 2023).
- Li, C.; Li, L.; Geng, Y.; Jiang, H.; Cheng, M.; Zhang, B.; Ke, Z.; Xu, X.; Chu, X. YOLOv6 v3.0: A Full-Scale Reloading. arXiv 2023, arXiv:2301.05586. [Google Scholar]
- Wang, C.-Y.; Bochkovskiy, A.; Liao, H.-Y.M. YOLOv7: Trainable Bag-of-Freebies Sets New State-of-the-Art for Real-Time Object Detectors. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 1571–1580. [Google Scholar]
- Ultralytics Yolov8 2023. Available online: https://github.com/ultralytics/ultralytics (accessed on 2 July 2023).
- Wang, C.Y.; Mark Liao, H.Y.; Wu, Y.H.; Chen, P.Y.; Hsieh, J.W.; Yeh, I.H. CSPNet: A New Backbone That Can Enhance Learning Capability of CNN. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Seattle, WA, USA, 14–19 June 2020; pp. 1571–1580. [Google Scholar] [CrossRef]
- Wang, K.; Liew, J.H.; Zou, Y.; Zhou, D.; Feng, J. PANet: Few-Shot Image Semantic Segmentation with Prototype Alignment. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October–2 November 2019; pp. 9196–9205. [Google Scholar] [CrossRef] [Green Version]
- Nepal, U.; Eslamiat, H. Comparing YOLOv3, YOLOv4 and YOLOv5 for Autonomous Landing Spot Detection in Faulty UAVs. Sensors 2022, 22, 464. [Google Scholar] [CrossRef]
- Xu, R.; Lin, H.; Lu, K.; Cao, L.; Liu, Y. A Forest Fire Detection System Based on Ensemble Learning. Forests 2021, 12, 217. [Google Scholar] [CrossRef]
- Ding, X.; Zhang, X.; Han, J.; Ding, G.; Sun, J. RepVGG: Making VGG-Style ConvNets Great Again. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019. [Google Scholar]
- Liu, S. Path Aggregation Network for Instance Segmentation. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar]
- Scott, M.R. TOOD: Task-Aligned One-Stage Object Detection. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, BC, Canada, 11–17 October 2021. [Google Scholar]
- Zhang, H.; Wang, Y.; Dayoub, F.; Niko, S. VarifocalNet: An IoU-Aware Dense Object Detector. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 8514–8523. [Google Scholar]
- Loss, S.; Powerful, M.; For, L.; Box, B. 1 SIoU Loss: More Powerful Learning for Bounding Box Regression Zhora Gevorgyan. arXiv 2022, arXiv:2205.12740. [Google Scholar]
- Rezatofighi, H.; Tsoi, N.; Gwak, J.; Sadeghian, A.; Reid, I.; Savarese, S. Generalized Intersection over Union: A Metric and A Loss for Bounding Box Regression. arXiv 2019, arXiv:1902.09630v2. [Google Scholar]
- Ding, X.; Chen, H.; Zhang, X.; Huang, K.; Han, J.; Ding, G. Re-Parameterizingyouroptimizersratherthan Architectures. arXiv 2023, arXiv:2205.15242. [Google Scholar]
- Changyong, S.; Yifan, L.; Jianfei, G.; Zheng, Y.; Chunhua, S. Channel-Wise Knowledge Distillation for Dense Prediction. In Proceedings of the IEEE/CVFInternationalConferenceonComputerVision, Montreal, BC, Canada, 11–17 October 2021; pp. 5311–5320. [Google Scholar]
- Terven, J.; Cordova-Esparza, D. A Comprehensive Review of YOLO: From YOLOv1 to YOLOv8 and Beyond. arXiv 2023, arXiv:2304.00501. [Google Scholar]
- Wang, C.; Liao, H.M.; Yeh, I.; Corporation, E.M. Designing Network Design Strategies Through Gradient Path Analysis. arXiv 2014, arXiv:2211.04800. [Google Scholar]
- Wang, C.; Yeh, I.; Liao, H.M. You Only Learn One Representation: Unified Network for Multiple Tasks. arXiv 2021, arXiv:2105.04206. [Google Scholar]
- Tan, M.; Pang, R.; Le, Q.V. EfficientDet: Scalable and Efficient Object Detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 10778–10787. [Google Scholar] [CrossRef]
- Tan, M.; Le, Q.V. EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks. In Proceedings of the International Conference on Machine Learning, Honolulu, HI, USA, 10–15 June 2019. [Google Scholar]
- Agumented Startups. Weeds Dataset 2021. Available online: https://universe.roboflow.com/augmented-startups/weeds-nxe1w (accessed on 2 July 2023).
- R Core Team. Team R: A Language and Environment for Statistical Computing; Team R: Vienna, Austria, 2016. [Google Scholar]
- Weisberg, S.; Fox, J. An R Companion to Applied Regression; Sage Publications: Thousand Oaks, CA, USA, 2011; ISBN 9781412975148. [Google Scholar]
- Calvo, B.; Santafé, G. Scmamp: Statistical Comparison of Multiple Algorithms in Multiple Problems. R J. 2016, 8, 248–256. [Google Scholar] [CrossRef] [Green Version]
- Benjumea, A.; Teeti, I.; Cuzzolin, F.; Bradley, A. YOLO-Z: Improving Small Object Detection in YOLOv5 for Autonomous Vehicles. arXiv 2021, arXiv:2112.11798. [Google Scholar]
- Sharpe, S.M.; Schumann, A.W.; Boyd, N.S. Goosegrass Detection in Strawberry and Tomato Using a Convolutional Neural Network. Sci. Rep. 2020, 10, 9548. [Google Scholar] [CrossRef]
- Qingfeng, W.; Kun-hui, L.; Chang-le, Z. Feature Extraction and Automatic Recognition of Plant Leaf Using Artificial Neural Network. Res. Comput. Sci. 2007, 20, 3–10. [Google Scholar]
- Hahn, D.S.; Roosjen, P.; Morales, A.; Nijp, J.; Beck, L.; Velasco Cruz, C.; Leinauer, B. Detection and Quantification of Broadleaf Weeds in Turfgrass Using Close-Range Multispectral Imagery with Pixel- and Object-Based Classification. Int. J. Remote Sens. 2021, 42, 8035–8055. [Google Scholar] [CrossRef]
- Yang, C.C.; Prasher, S.O.; Landry, J.A.; Ramaswamy, H.S.; DiTommaso, A. Application of Artificial Neural Networks in Image Recognition and Classification of Crop and Weeds. Can. Agric. Eng. 2000, 42, 147–152. [Google Scholar]





| Model | Anchor Boxes | Image Size | Batch Size | Epochs | Loss | lr | Solver | Agumentation |
|---|---|---|---|---|---|---|---|---|
| YOLOv5 | [10,13], [16,30], [33,23], [30,61], [62,45], [59,119], [116,90], [156,198], [373,326] | 640 × 640 | 8 | 100 | 0.02 | 0.01 | SGD (0.937 momentum) | hsv (h: 0.015; s: 0.7, v: 0.4), translate: 0.1, scale: 0.5, flip left-right: 0.5, mosaic: 1.0 |
| YOLOv6 | - | 640 × 640 | 8 | 100 | 0.02 | 0.01 | SGD (0.937 momentum) | hsv (h: 0.015; s: 0.7, v: 0.4), translate: 0.1, scale: 0.5, flip left-right: 0.5, mosaic: 1.0 |
| YOLOv7 | - | 640 × 640 | 8 | 100 | 0.02 | 0.01 | SGD (0.937 momentum) | hsv (h: 0.015; s: 0.7, v: 0.4), translate: 0.2, scale: 0.9, flip left-right: 0.5, mosaic: 1.0 mixup: 0,15 |
| YOLOv8 | - | 640 × 640 | 8 | 100 | 0.02 | 0.01 | SGD (0.937 momentum) | hsv (h: 0.015; s: 0.7, v: 0.4), translate: 0.1, scale: 0.5, flip left-right: 0.5, mosaic: 1.0 |
| Model | Precision | Recall | mAP_0.5 | mAP_0.5:0.95 | ||||
|---|---|---|---|---|---|---|---|---|
| EfficientDet | 0.9033 ± 0.0244 * | b ** | 0.8862 ± 0.0312 | c | 0.8931 ± 0.0312 | d | 0.7172 ± 0.0313 | ef |
| YOLOv5n | 0.9259 ± 0.0102 | ab | 0.893 ± 0.0594 | bc | 0.9343 ± 0.0387 | abcd | 0.7002 ± 0.012 | f |
| YOLOv5s | 0.9445 ± 0.0281 | a | 0.756 ± 0.0233 | de | 0.9104 ± 0.0408 | bcd | 0.8674 ± 0.0664 | a |
| YOLOv5m | 0.9305 ± 0.0484 | ab | 0.7305 ± 0.0381 | e | 0.9057 ± 0.0307 | cd | 0.8841 ± 0.0795 | a |
| YOLOv5l | 0.9264 ± 0.0484 | ab | 0.7313 ± 0.0672 | e | 0.9197 ± 0.0333 | abcd | 0.8606 ± 0.0442 | a |
| YOLOv5x | 0.939 ± 0.0459 | ab | 0.7928 ± 0.0181 | d | 0.9104 ± 0.06 | bcd | 0.8789 ± 0.0507 | a |
| YOLOv6n | 0.9456 ± 0.0146 | a | 0.7594 ± 0.0172 | de | 0.9539 ± 0.0142 | ab | 0.7112 ± 0.0093 | ef |
| YOLOv6s | 0.9331 ± 0.0294 | ab | 0.7707 ± 0.0223 | de | 0.9392 ± 0.0286 | abc | 0.7208 ± 0.0186 | ef |
| YOLOv6m | 0.9401 ± 0.0237 | ab | 0.7344 ± 0.0293 | e | 0.9237 ± 0.0354 | abcd | 0.7156 ± 0.0192 | ef |
| YOLOv6l | 0.9414 ± 0.023 | a | 0.7728 ± 0.0346 | de | 0.9508 ± 0.0147 | ab | 0.7277 ± 0.0178 | def |
| YOLOv7 | 0.9111 ± 0.0209 | ab | 0.9552 ± 0.0136 | a | 0.9594 ± 0.0214 | a | 0.7625 ± 0.014 | bcde |
| YOLOv7x | 0.9398 ± 0.0238 | ab | 0.9338 ± 0.0321 | ab | 0.9366 ± 0.0302 | abcd | 0.7393 ± 0.0244 | cdef |
| YOLOv8n | 0.9266 ± 0.0265 | ab | 0.9269 ± 0.0271 | abc | 0.9412 ± 0.0202 | abc | 0.7547 ± 0.0403 | bcde |
| YOLOv8s | 0.9169 ± 0.0275 | ab | 0.939 ± 0.0526 | ab | 0.9051 ± 0.0625 | cd | 0.7517 ± 0.043 | bcdef |
| YOLOv8m | 0.9227 ± 0.0257 | ab | 0.9247 ± 0.0363 | abc | 0.9385 ± 0.0326 | abc | 0.7769 ± 0.0302 | bcd |
| YOLOv8l | 0.9235 ± 0.0276 | ab | 0.9244 ± 0.0417 | abc | 0.955 ± 0.0263 | a | 0.8043 ± 0.015 | b |
| YOLOv8x | 0.9304 ± 0.021 | ab | 0.9189 ± 0.0417 | abc | 0.9477 ± 0.0296 | abc | 0.7925 ± 0.0333 | bc |
| Model | Dataset | P | R | mAP_0.5 | mAP_0.5:0.95 | Inference (ms) a |
|---|---|---|---|---|---|---|
| EfficientDet | ‘Weeds’ public | 0.9133 | 0.9273 | 0.9426 | 0.7023 | 44.3 |
| Home Lawn | 0.5982 | 0.5149 | 0.5195 | 0.4155 | 52.0 | |
| Baseball Field | 0.6138 | 0.7069 | 0.6614 | 0.4136 | 54.2 | |
| Manila grass | 0.6047 | 0.6954 | 0.5691 | 0.4369 | 50.1 | |
| YOLOv5m | ‘Weeds’ public | 0.9433 | 0.9663 | 0.9772 | 0.7828 | 16.2 |
| Home Lawn | 0.6331 | 0.5272 | 0.5399 | 0.4263 | 19.2 | |
| Baseball Field | 0.6856 | 0.8126 | 0.7135 | 0.4716 | 24.1 | |
| Manila grass | 0.6441 | 0.5433 | 0.6412 | 0.5007 | 18.7 | |
| YOLOv6l | ‘Weeds’ public | 0.9442 | 0.9494 | 0.9747 | 0.7612 | 22.8 |
| Home Lawn | 0.7836 | 0.6446 | 0.7057 | 0.5022 | 32.5 | |
| Baseball Field | 0.6098 | 0.6491 | 0.5379 | 0.4108 | 47.9 | |
| Manila grass | 0.5865 | 0.7571 | 0.7014 | 0.5248 | 26.6 | |
| YOLOv7 | ‘Weeds’ public | 0.9265 | 0.9627 | 0.9745 | 0.7685 | 16.1 |
| Home Lawn | 0.7118 | 0.6454 | 0.7108 | 0.5209 | 29.1 | |
| Baseball Field | 0.6223 | 0.7579 | 0.6379 | 0.4009 | 35.6 | |
| Manila grass | 0.6549 | 0.7571 | 0.6461 | 0.4614 | 27.5 | |
| YOLOv8l | ‘Weeds’ public | 0.9476 | 0.9610 | 0.9795 | 0.8123 | 34.0 |
| Home Lawn | 0.6567 | 0.6422 | 0.6564 | 0.4721 | 37.4 | |
| Baseball Field | 0.6672 | 0.6474 | 0.6459 | 0.4312 | 19.7 | |
| Manila grass | 0.7635 | 0.6519 | 0.7589 | 0.5296 | 36.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sportelli, M.; Apolo-Apolo, O.E.; Fontanelli, M.; Frasconi, C.; Raffaelli, M.; Peruzzi, A.; Perez-Ruiz, M. Evaluation of YOLO Object Detectors for Weed Detection in Different Turfgrass Scenarios. Appl. Sci. 2023, 13, 8502. https://doi.org/10.3390/app13148502
Sportelli M, Apolo-Apolo OE, Fontanelli M, Frasconi C, Raffaelli M, Peruzzi A, Perez-Ruiz M. Evaluation of YOLO Object Detectors for Weed Detection in Different Turfgrass Scenarios. Applied Sciences. 2023; 13(14):8502. https://doi.org/10.3390/app13148502
Chicago/Turabian StyleSportelli, Mino, Orly Enrique Apolo-Apolo, Marco Fontanelli, Christian Frasconi, Michele Raffaelli, Andrea Peruzzi, and Manuel Perez-Ruiz. 2023. "Evaluation of YOLO Object Detectors for Weed Detection in Different Turfgrass Scenarios" Applied Sciences 13, no. 14: 8502. https://doi.org/10.3390/app13148502