
Power-Split Hybrid Train Configuration Design Based on a Single-Row Star Row

Abstract
:Featured Application
Abstract
1. Introduction
2. Configuration Choice
2.1. Method of Selecting the Configuration
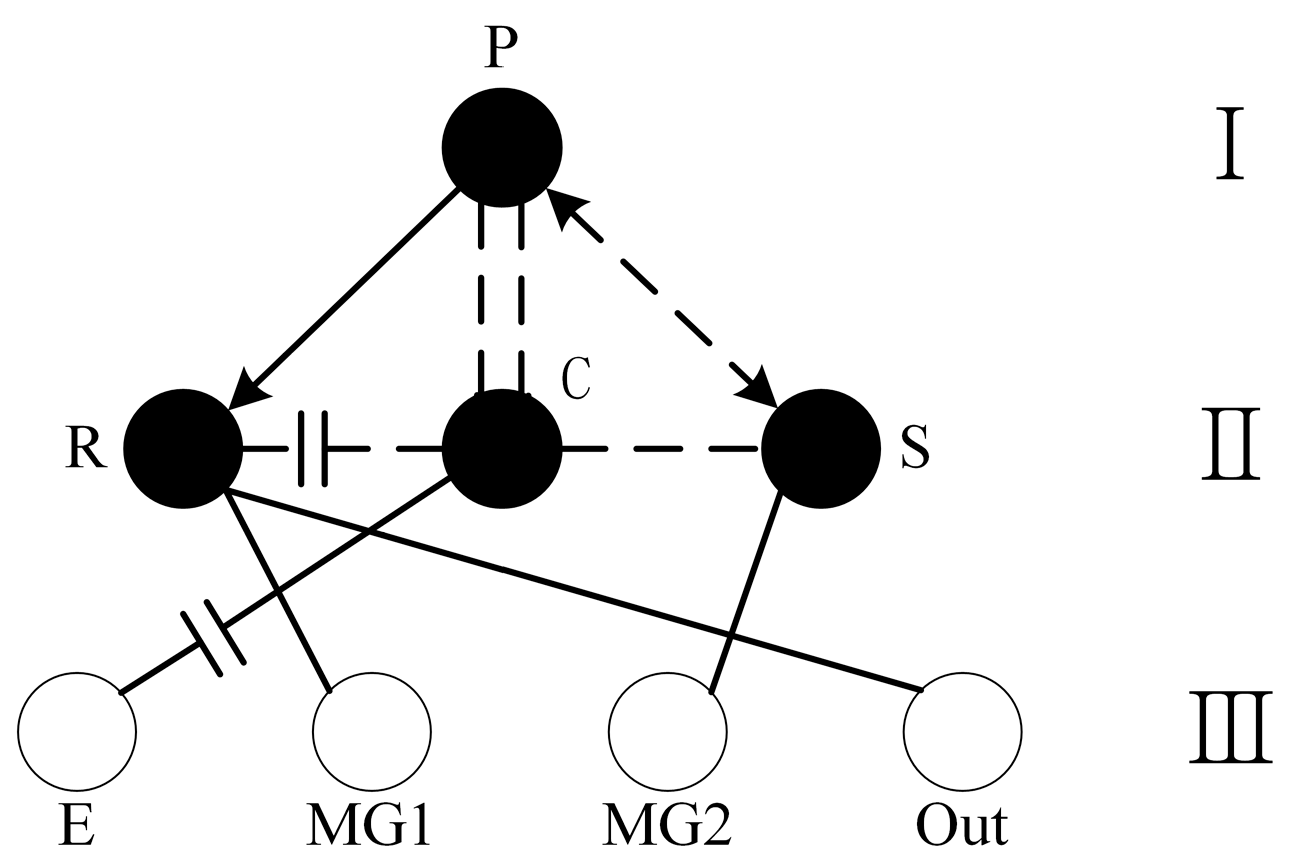
2.2. Single-Row Star-Row Power-Split Configuration
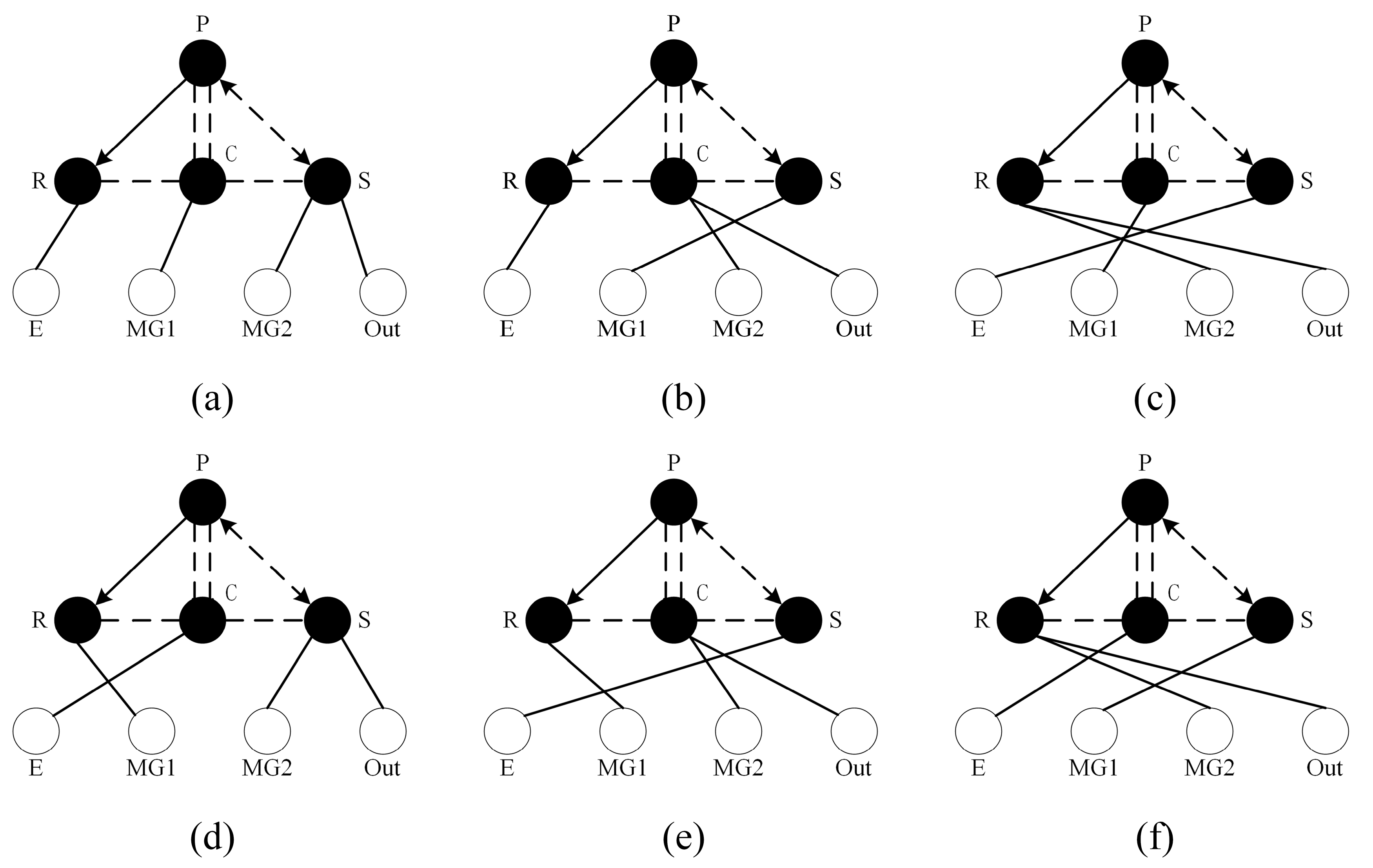
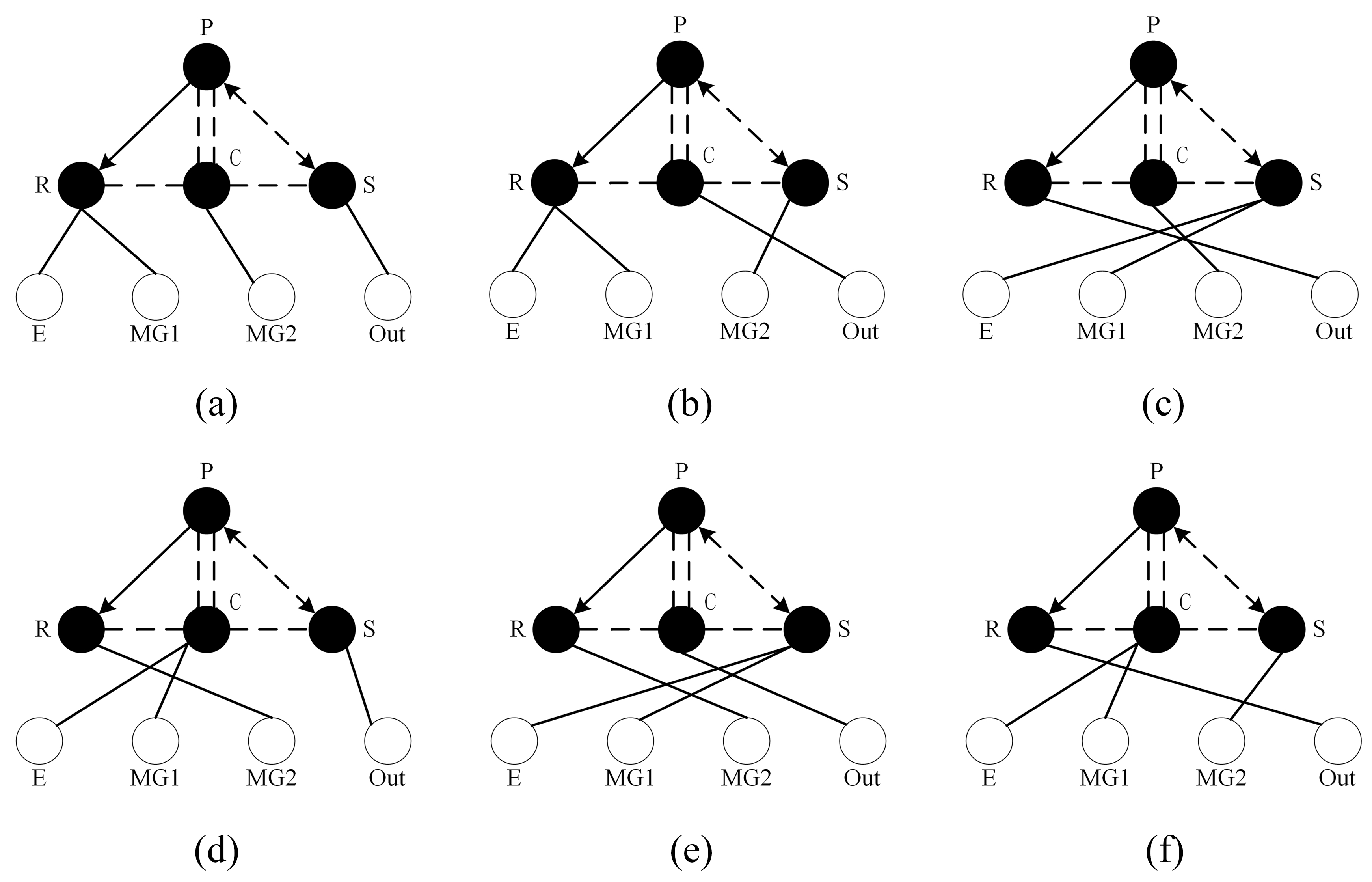
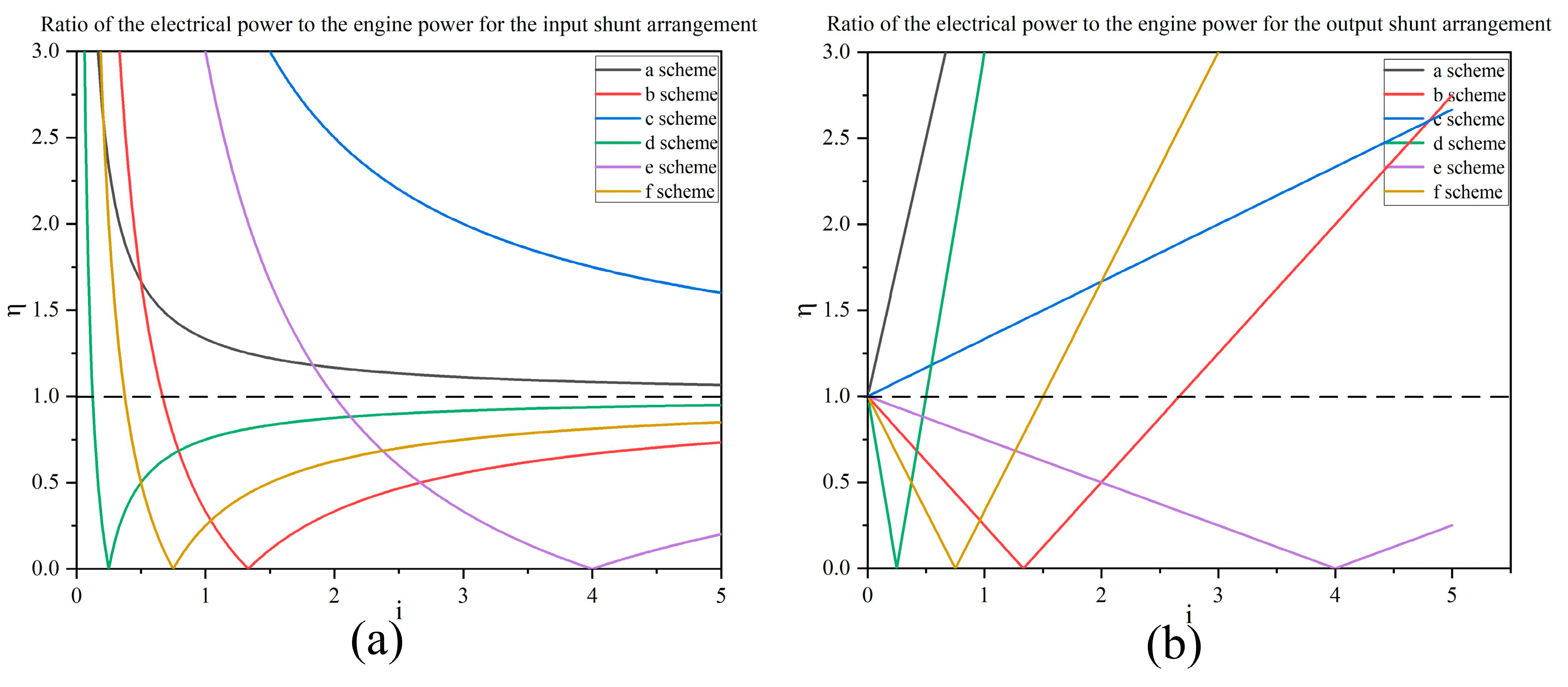
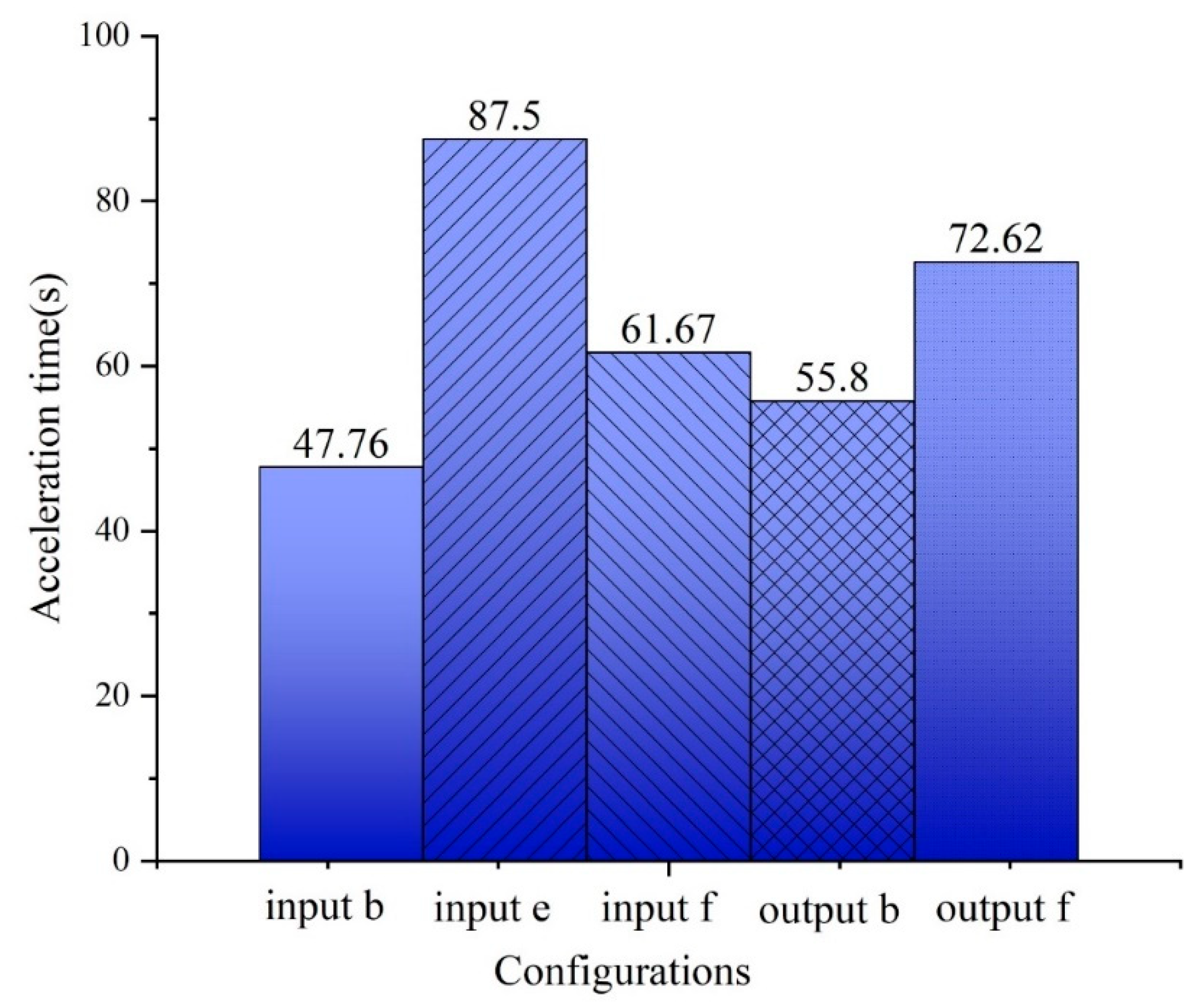
3. Preliminary Configuration Scheme Selection
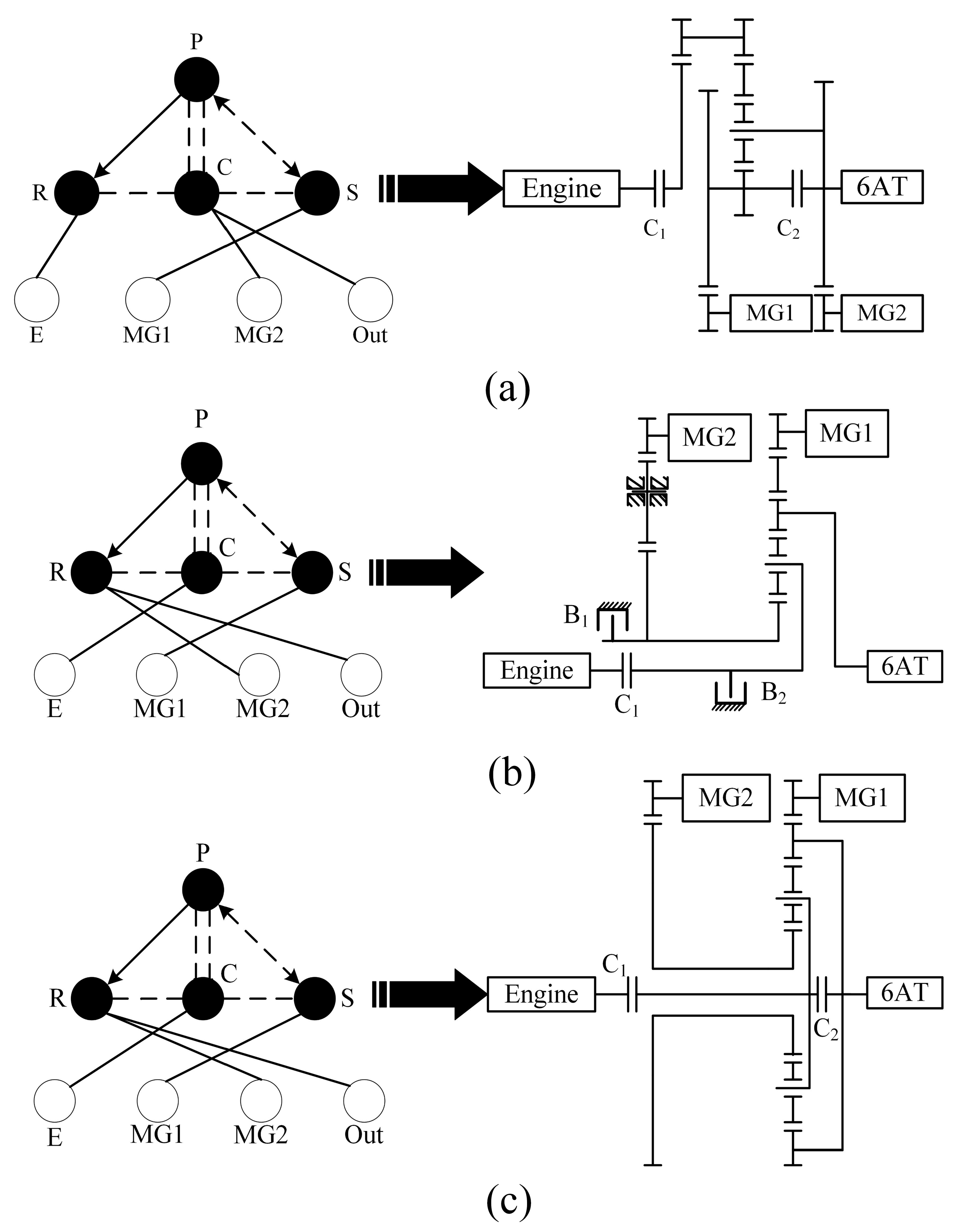
4. Analysis and Design of the Configuration Scheme
4.1. Design Analysis When Using Scheme (b)
4.2. Design Analysis When Using Scheme (f)
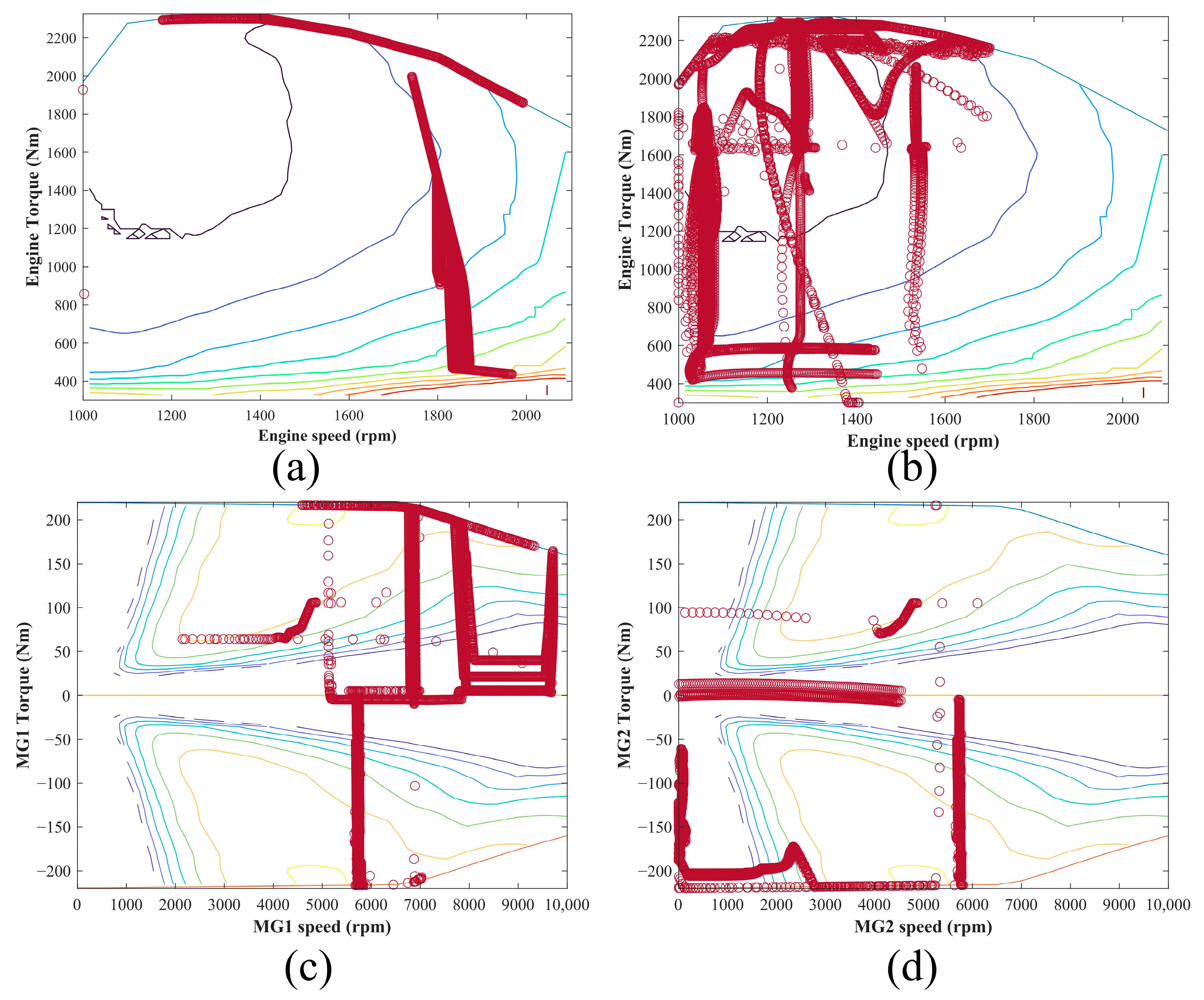
5. Simulation Analysis
6. Conclusions
- The small locomotive is clearly identified as the research object of this paper, and the total power output is 540 kW. Input and output power-split configurations were analyzed according to the connection characteristics of the single-row star row, and a graphical–theoretical model and a relationship matrix for the configuration design were established.
- Firstly, two input distributed power-splitting schemes that meet the conditions were determined based on the ratio of electric power to engine power and dynamic planning algorithm. Three hybrid coupling mechanism schemes were constructed for the above two configuration schemes with consideration of the working mode and space structure layout requirements. The scheme that meets the design requirements of the hybrid train was finally selected.
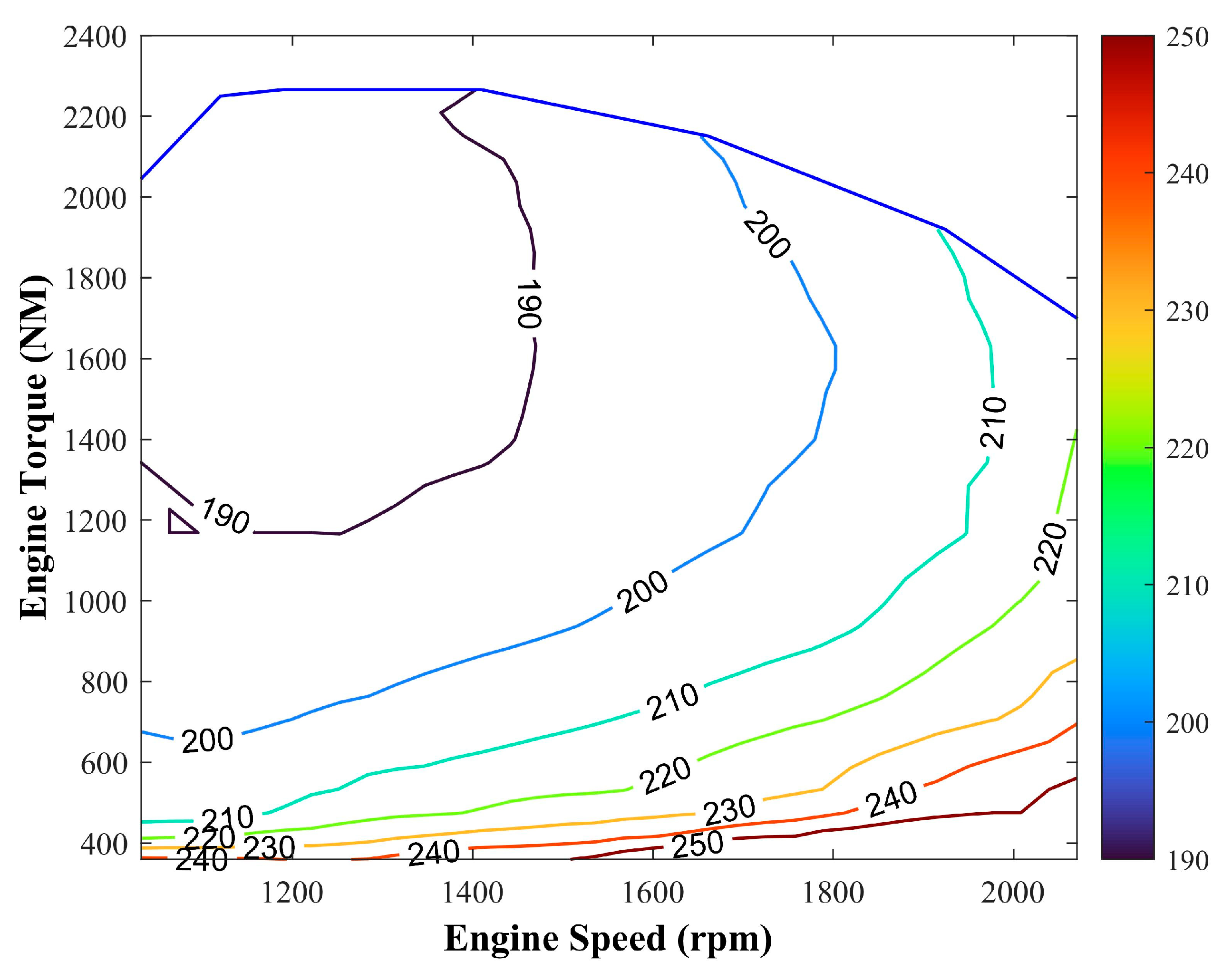
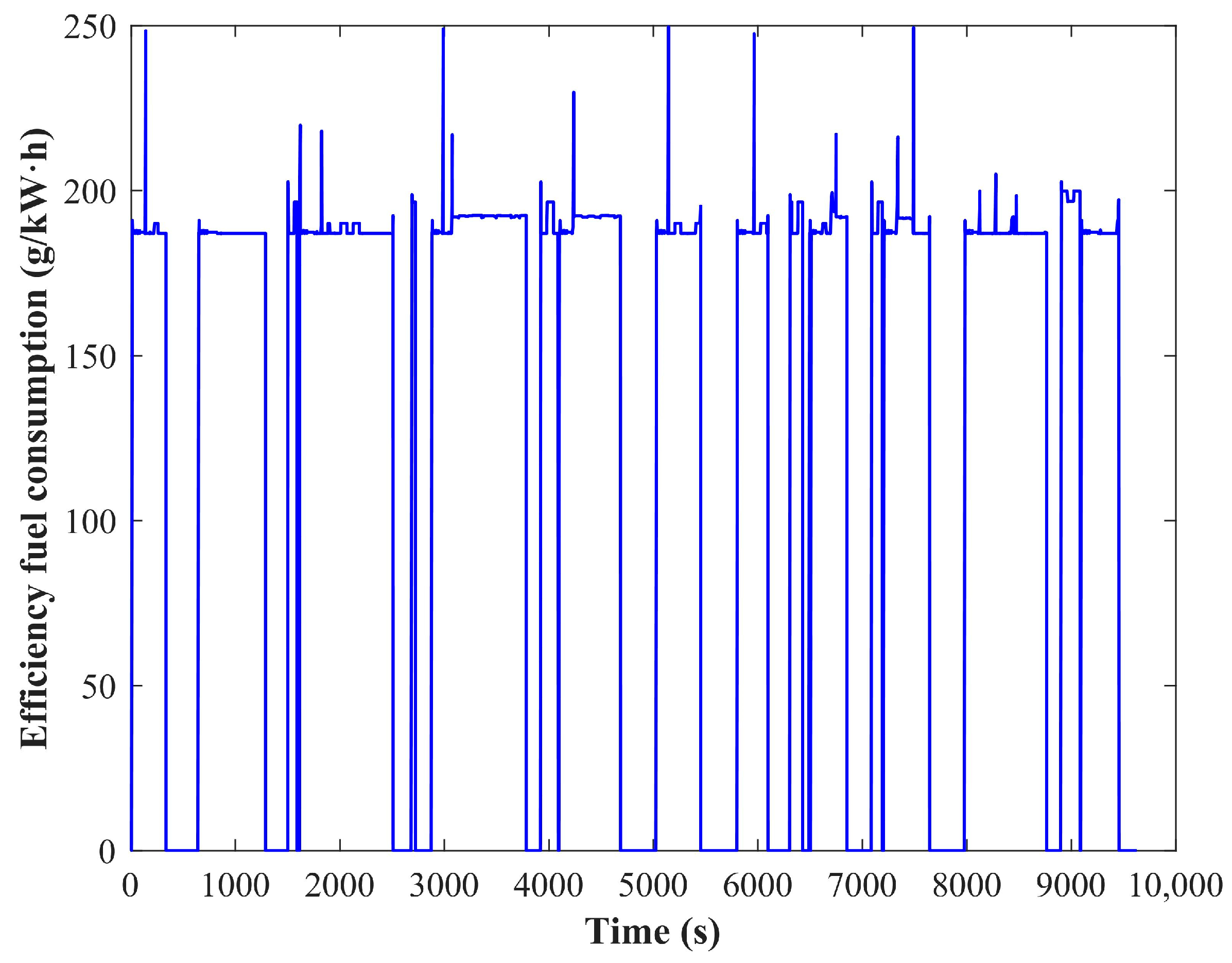
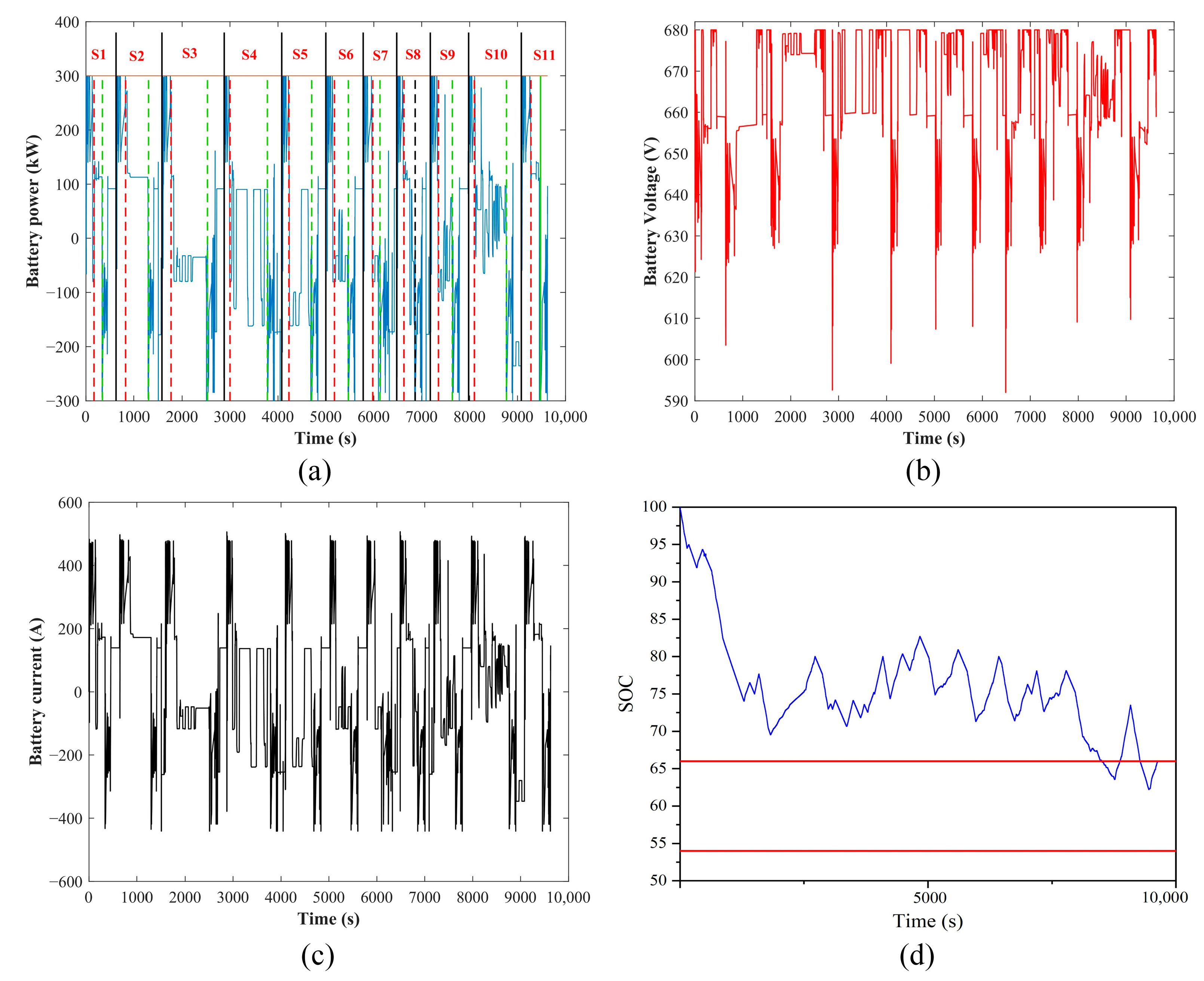
- By creating a simulation model for the entire vehicle, it was possible to determine the battery operating state and engine fuel consumption rate of the train in each hybrid mode as well as the operating points of the engine during vehicle operation. At the end of the train operation, the battery SOC was in the balance range. The simulation verified the effectiveness of the chosen configuration.
- Future research will examine in further detail the impact of the efficiency of power-switching elements on the various operating modes of the hybrid box, as well as the coordinated matching control between the engine and the dual motors.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Boehm, M.; Arnz, M.; Winter, J. The potential of high-speed rail freight in Europe: How is a modal shift from road to rail possible for low-density high value cargo? Eur. Transp. Res. Rev. 2021, 13, 4. [Google Scholar] [CrossRef]
- Hanssen, T.-E.S.; Mathisen, T.A.; Jørgensen, F. Generalized Transport Costs in Intermodal Freight Transport. Procedia Soc. Behav. Sci. 2012, 54, 189–200. [Google Scholar] [CrossRef] [Green Version]
- Meinert, M.; Melzer, M.; Kamburow, C.; Palacin, R.; Leska, M.; Aschemann, H. Benefits of hybridisation of diesel driven rail vehicles: Energy management strategies and life-cycle costs appraisal. Appl. Energy 2015, 157, 897–904. [Google Scholar] [CrossRef]
- Wishart, J.; Zhou, Y.L.; Dong, Z. Review of multi-regime hybrid vehicle powertrain architecture. Int. J. Electr. Hybrid Veh. 2008, 1, 248. [Google Scholar] [CrossRef] [Green Version]
- Frieske, B.; Kloetzke, M.; Mauser, F. Trends in Vehicle Concept and Key Technology Development for Hybrid and Battery Electric Vehicles. World Electr. Veh. J. 2014, 6, 9–20. [Google Scholar] [CrossRef] [Green Version]
- Donateo, T.; Chiodo, L.S. Design and Reliability Analysis of a Series/Parallel Hybrid System with a Rotary Engine for Safer Ultralight Aviation. Appl. Sci. 2023, 13, 4155. [Google Scholar] [CrossRef]
- Li, Q.; Zhang, Z.; Bai, J.; Zhang, T.; Gai, F. Development of a Compound Power-split Hybrid Power System for Commercial Vehicles. Int. J. Automot. Technol. 2022, 23, 135–147. [Google Scholar] [CrossRef]
- Yang, Y.; Li, P.; Pei, H.; Zou, Y. Design of all-wheel-drive power-split hybrid configuration schemes based on hierarchical topology graph theory. Energy 2022, 242, 122944. [Google Scholar] [CrossRef]
- Zhao, Z.; Tang, P.; Li, H. Generation, Screening, and Optimization of Powertrain Configurations for Power-Split Hybrid Electric Vehicle: A Comprehensive Overview. IEEE Trans. Transp. Electrif. 2022, 8, 325–344. [Google Scholar] [CrossRef]
- Ho, T.-T.; Hwang, S.-J. Configuration Synthesis of Novel Hybrid Transmission Systems Using a Combination of a Ravigneaux Gear Train and a Simple Planetary Gear Train. Energies 2020, 13, 2333. [Google Scholar] [CrossRef]
- Li, Q.; Zhou, X.; Wang, S.; Liang, J. Power split transmission with continuously variable planetary ratio. Mech. Mach. Theory 2019, 140, 765–780. [Google Scholar] [CrossRef]
- Cammalleri, M.; Castellano, A. Analysis of hybrid vehicle transmissions with any number of modes and planetary gearing: Kinematics, power flows, mechanical power losses. Mech. Mach. Theory 2021, 162, 104350. [Google Scholar] [CrossRef]
- Hu, J.; Liu, Z.; Mei, B.; Peng, H. Optimization Design Scheme of Power-split Hybrid Electric Powertrain Configuration with Single Planetary Gear. JMechE 2021, 57, 264–276. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, S.; Shi, D.; Sun, X.; He, J. Research on instantaneous optimal control of the hybrid electric vehicle with planetary gear sets. J. Braz. Soc. Mech. Sci. Eng. 2019, 41, 51. [Google Scholar] [CrossRef]
- Lin, C.H. Modeling and analysis of power trains for hybrid electric vehicles. Int. Trans. Electr. Energy Syst. 2018, 28, e2541. [Google Scholar] [CrossRef]
- Yang, Y.; Mi, J.; Hu, X.; Qin, D. Graph Theory Modeling and Dynamics Analysis on the Coupled Planetary Transmission System of HEV. Automot. Eng. 2015, 37, 9–15+54. [Google Scholar]
- Zhang, X.; Li, S.E.; Peng, H.; Sun, J. Design of Multimode Power-Split Hybrid Vehicles—A Case Study on the Voltec Powertrain System. IEEE Trans. Veh. Technol. 2016, 65, 4790–4801. [Google Scholar] [CrossRef]
- Ngo, H.; Yan, H. Configuration synthesis of series–parallel hybrid transmissions. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2015, 230, 664–678. [Google Scholar] [CrossRef]
- Bayrak, A.E.; Ren, Y.; Papalambros, P.Y. Topology Generation for Hybrid Electric Vehicle Architecture Design. J. Mech. Des. 2016, 138, 081401. [Google Scholar] [CrossRef]
- Pei, H.; Hu, X.; Yang, Y.; Tang, X.; Hou, C.; Cao, D. Configuration optimization for improving fuel efficiency of power split hybrid powertrains with a single planetary gear. Appl. Energy 2018, 214, 103–116. [Google Scholar] [CrossRef]
- Wang, C.-L.; Yin, C.-L.; Zhang, T.; Zhu, L. Powertrain design and experiment research of a parallel hybrid electric vehicle. Int. J. Automot. Technol. 2009, 10, 589–596. [Google Scholar] [CrossRef]
- Dong, P.; Zuo, S.; Liu, T.; Xu, X.; Guo, W.; Liu, Y.; Wu, H.; Wang, S. A matrix-based method for searching configurations of planetary gear trains. Mech. Mach. Theory 2023, 180, 105161. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Expression Information | Expression Symbol | Expression Meaning | |
|---|---|---|---|
| Planetary row parts | Solid circle |  | Planetary row elements |
| Hollow circle |  | Power components and power-switching elements | |
| Connections | Single solid line |  | Planetary row components connected to power elements |
| Two-way dashed line |  | External planetary row gear | |
| Single arrow solid line |  | Internal planetary row gear | |
| Dotted line |  | Multi-connector connection (C, S, and R coaxial rotation) | |
| Double dashed line |  | Single-connector connection (C and P coaxial rotation) | |
| Two-way solid line |  | Connection via a power-switching element | |
| Component levels | Planetary wheel layer | I | — |
| Solar plexus layer | II | — | |
| Power component layer | III | — | |
| Power-switching elements | Clutch |  | — |
| Brake |  | — | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Zhang, Z.; Qu, G.; Cao, X.; Shi, W.; Li, G. Power-Split Hybrid Train Configuration Design Based on a Single-Row Star Row. Appl. Sci. 2023, 13, 7279. https://doi.org/10.3390/app13127279
Li W, Zhang Z, Qu G, Cao X, Shi W, Li G. Power-Split Hybrid Train Configuration Design Based on a Single-Row Star Row. Applied Sciences. 2023; 13(12):7279. https://doi.org/10.3390/app13127279
Chicago/Turabian StyleLi, Wenyong, Zhenyu Zhang, Guizheng Qu, Xiaolong Cao, Wankai Shi, and Guozhen Li. 2023. "Power-Split Hybrid Train Configuration Design Based on a Single-Row Star Row" Applied Sciences 13, no. 12: 7279. https://doi.org/10.3390/app13127279