
Optimization of a Multi-Type PMSM Based on Pyramid Neural Network


Abstract
:1. Introduction
2. Dataset Preparation
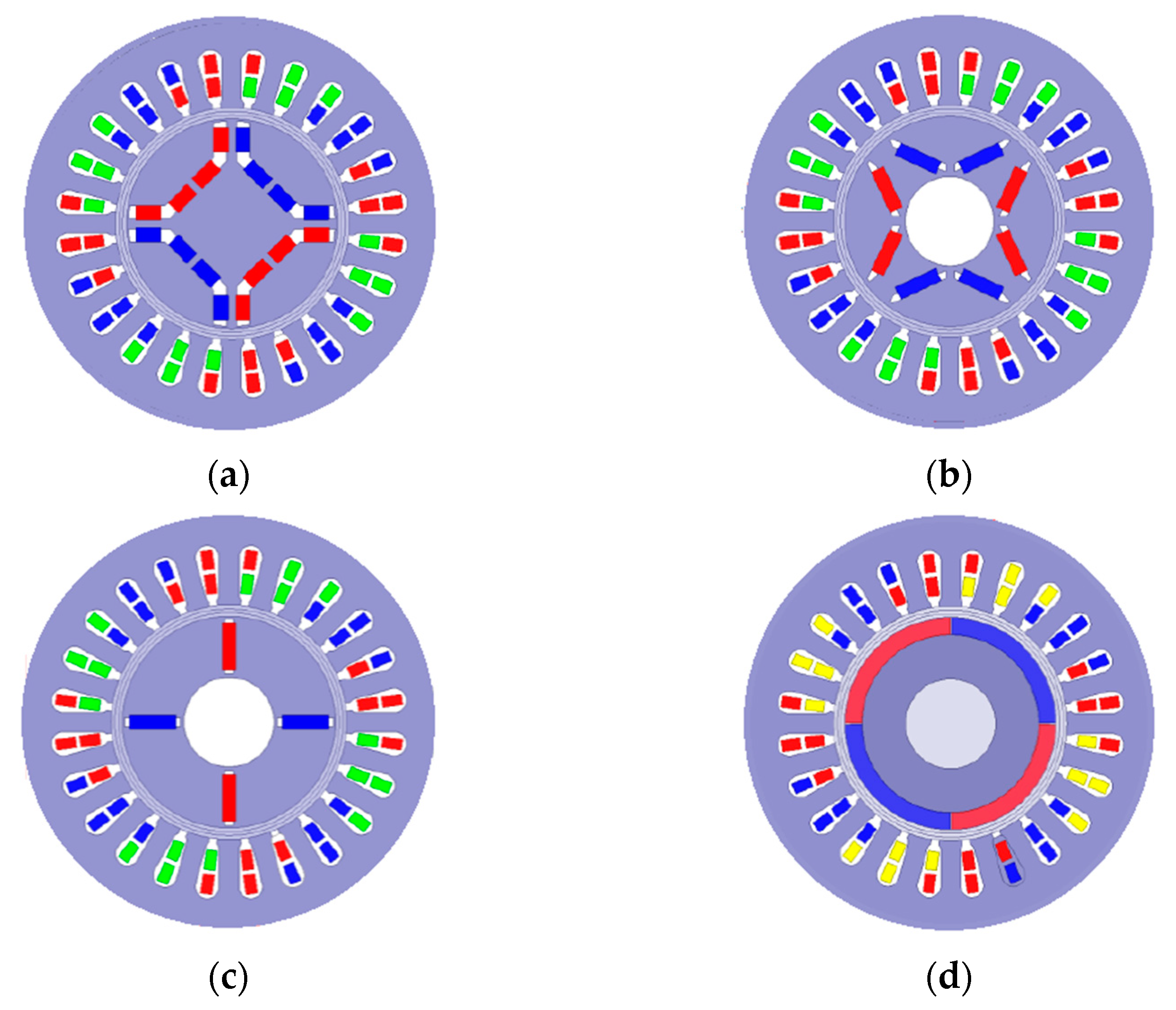
2.1. Alternative Arrangement of PMs
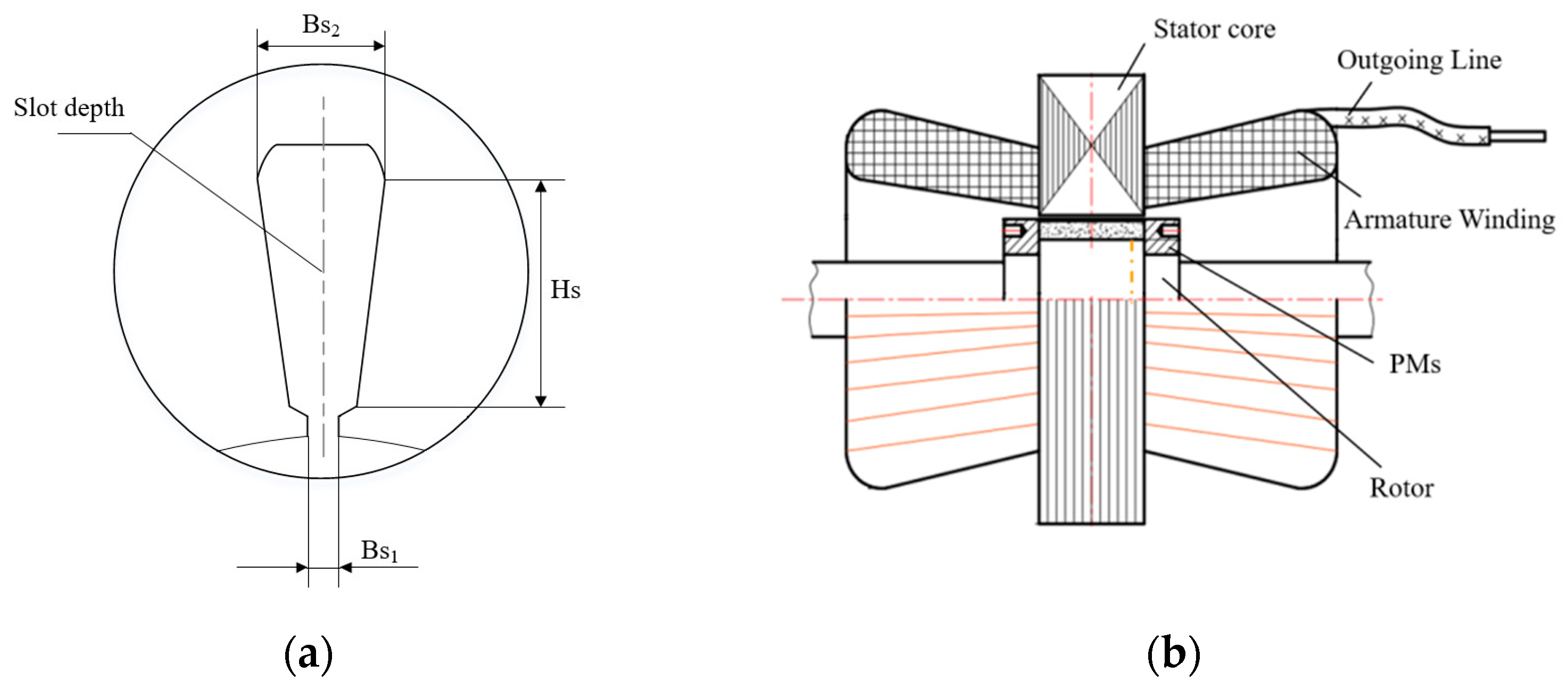
2.2. Basic Data of the PMSM
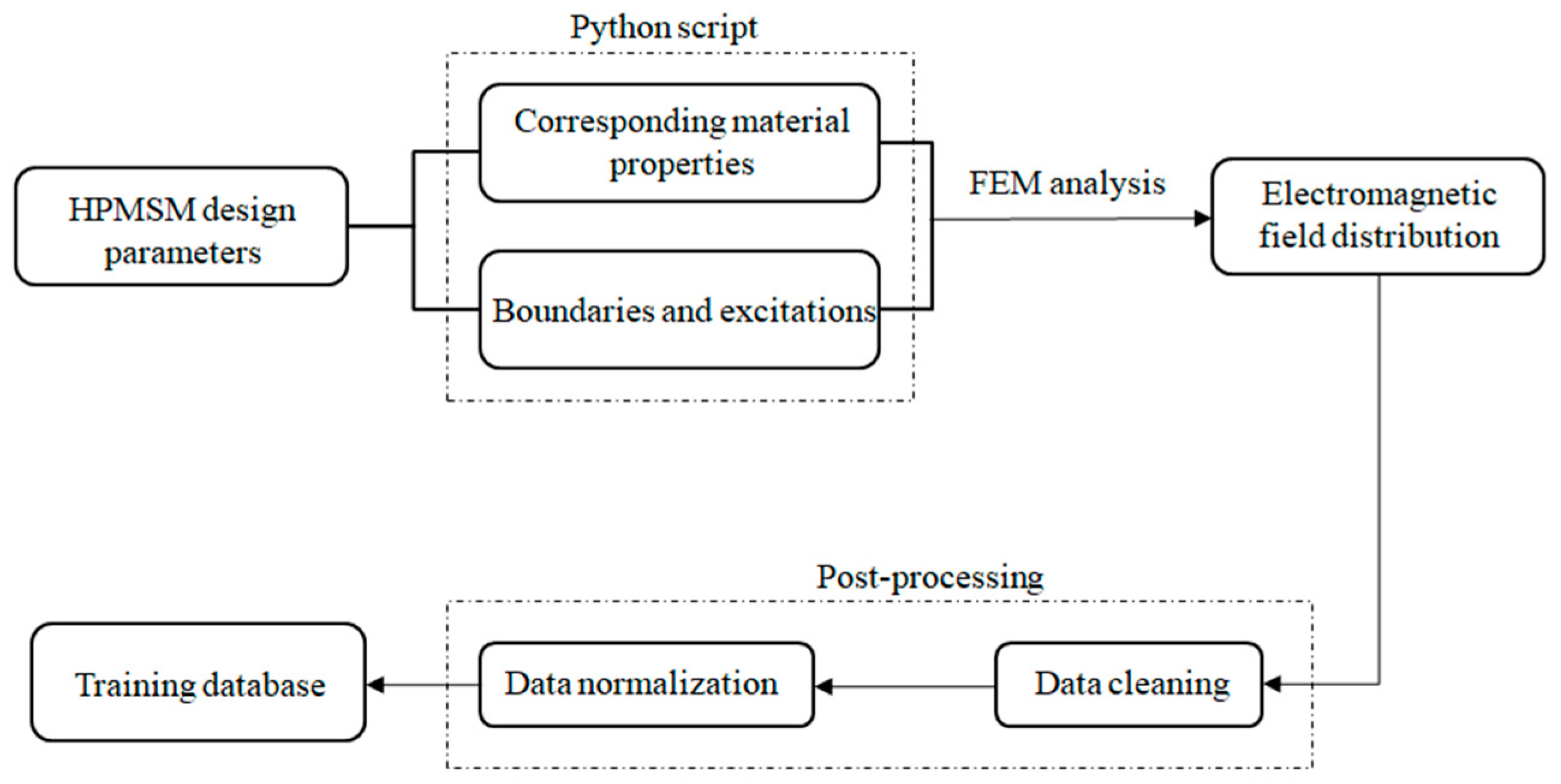
2.3. Database Generation
3. Prediction Model and HPMSM Optimization
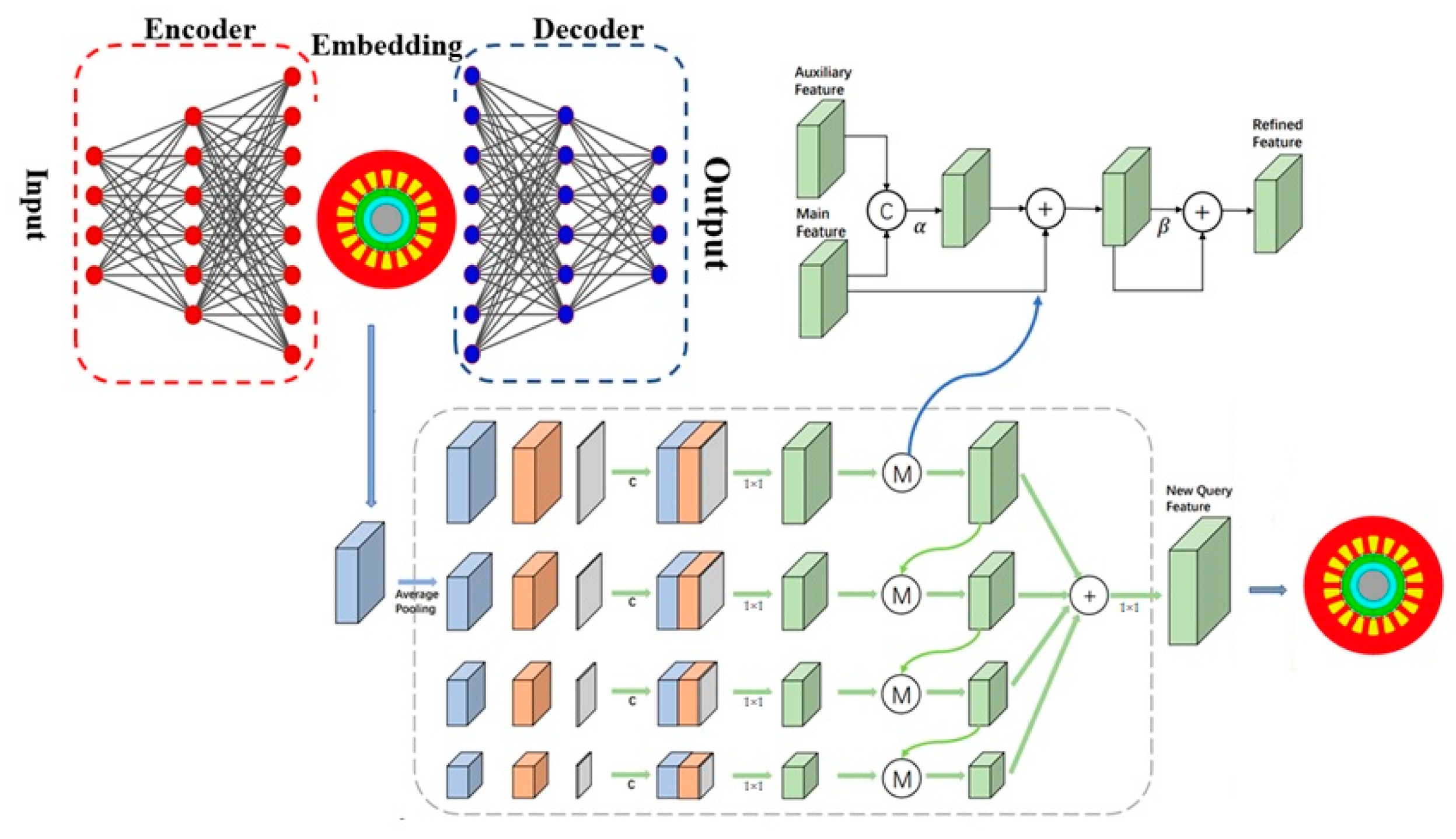
3.1. PNN Prediction Model
3.1.1. PNN Structure
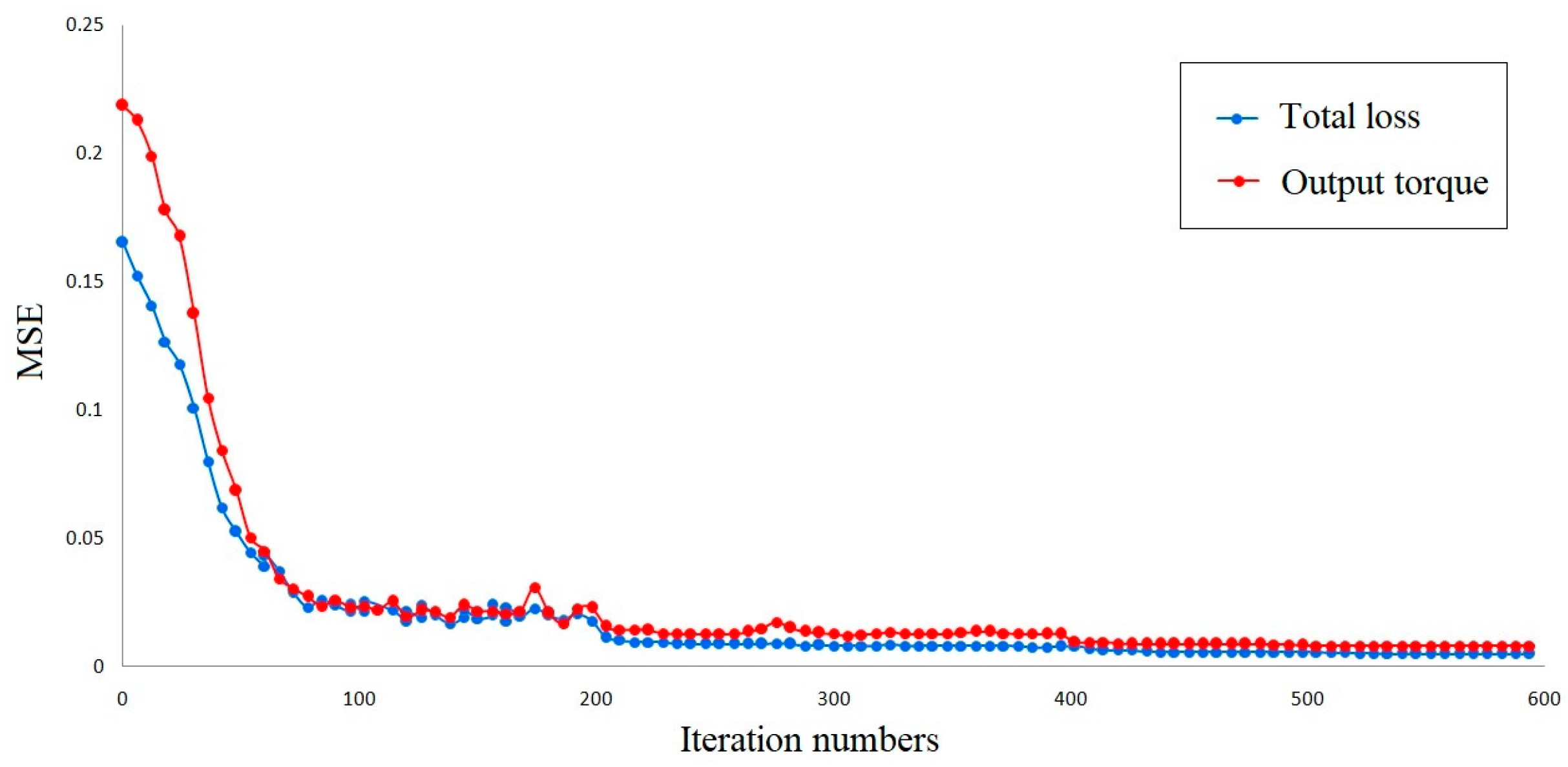
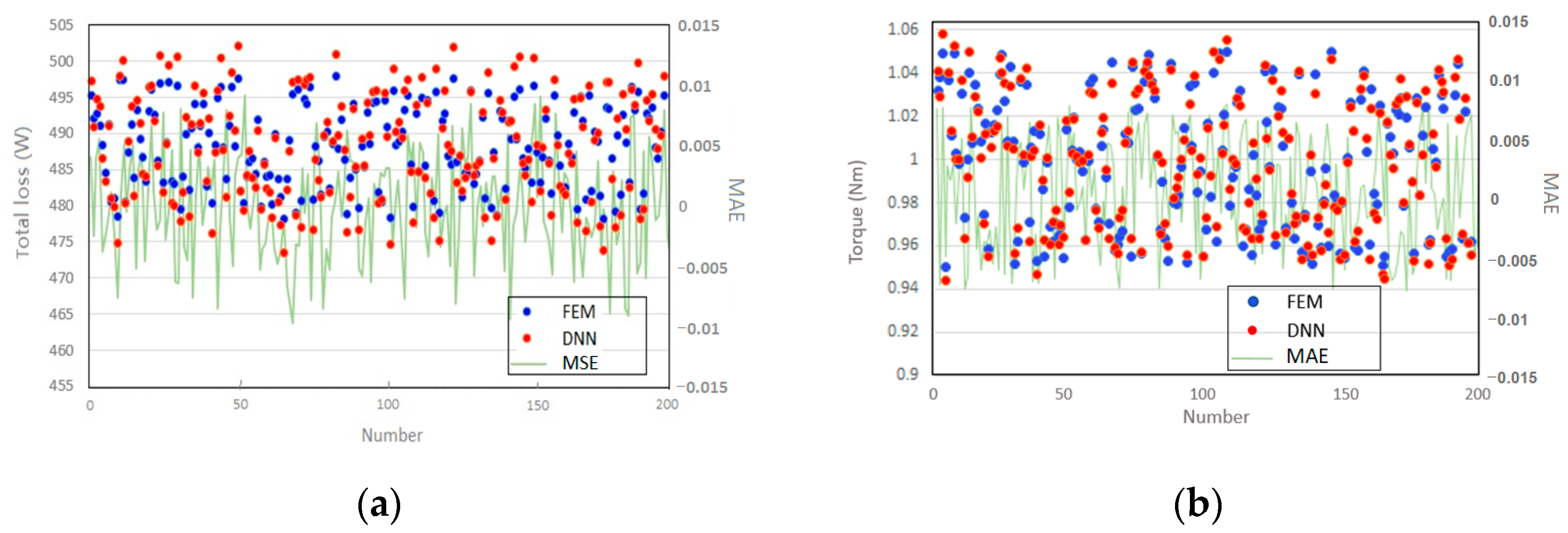
3.1.2. PNN Model Verification
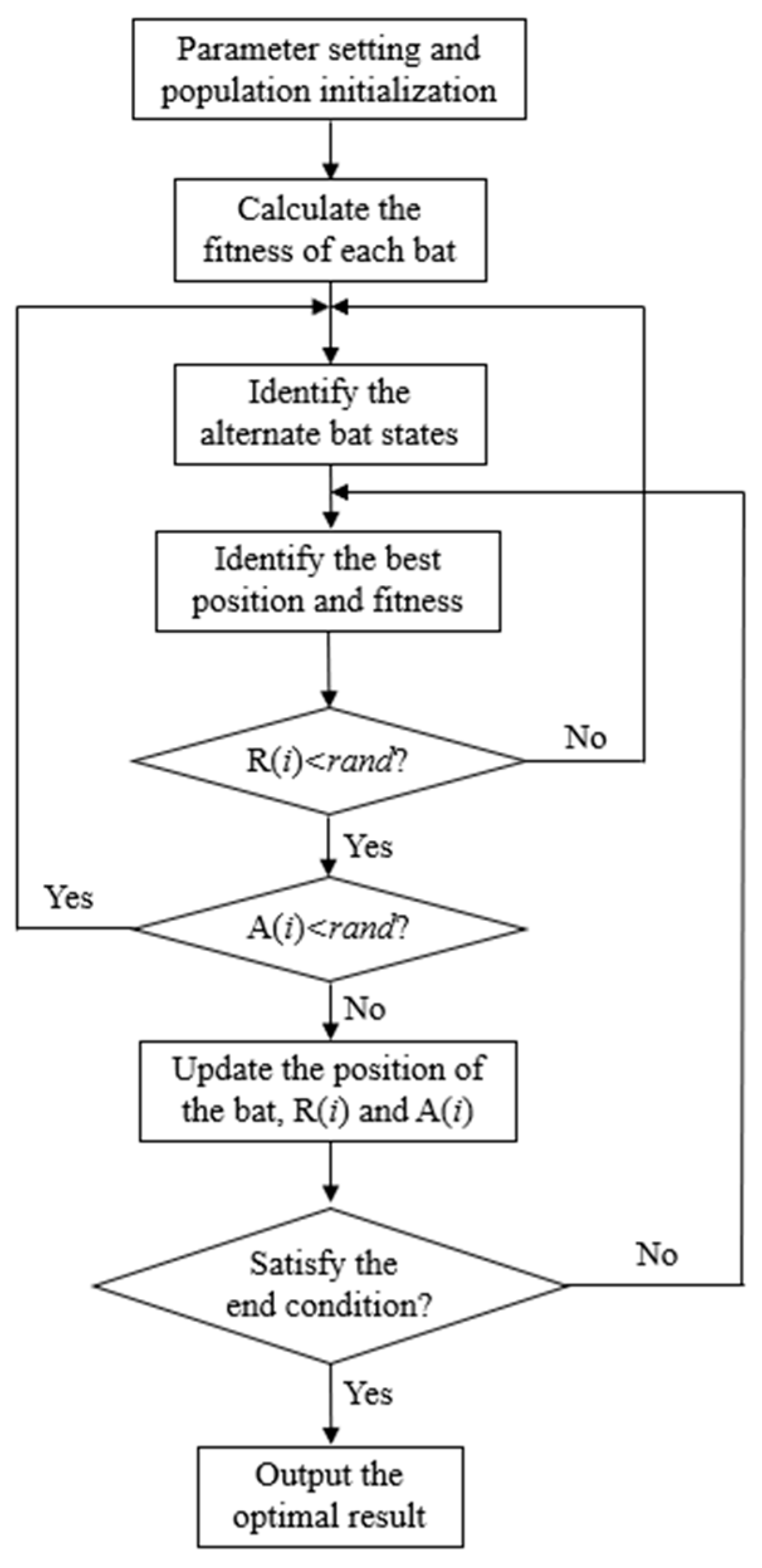
3.2. Quantum Bat Algorithm
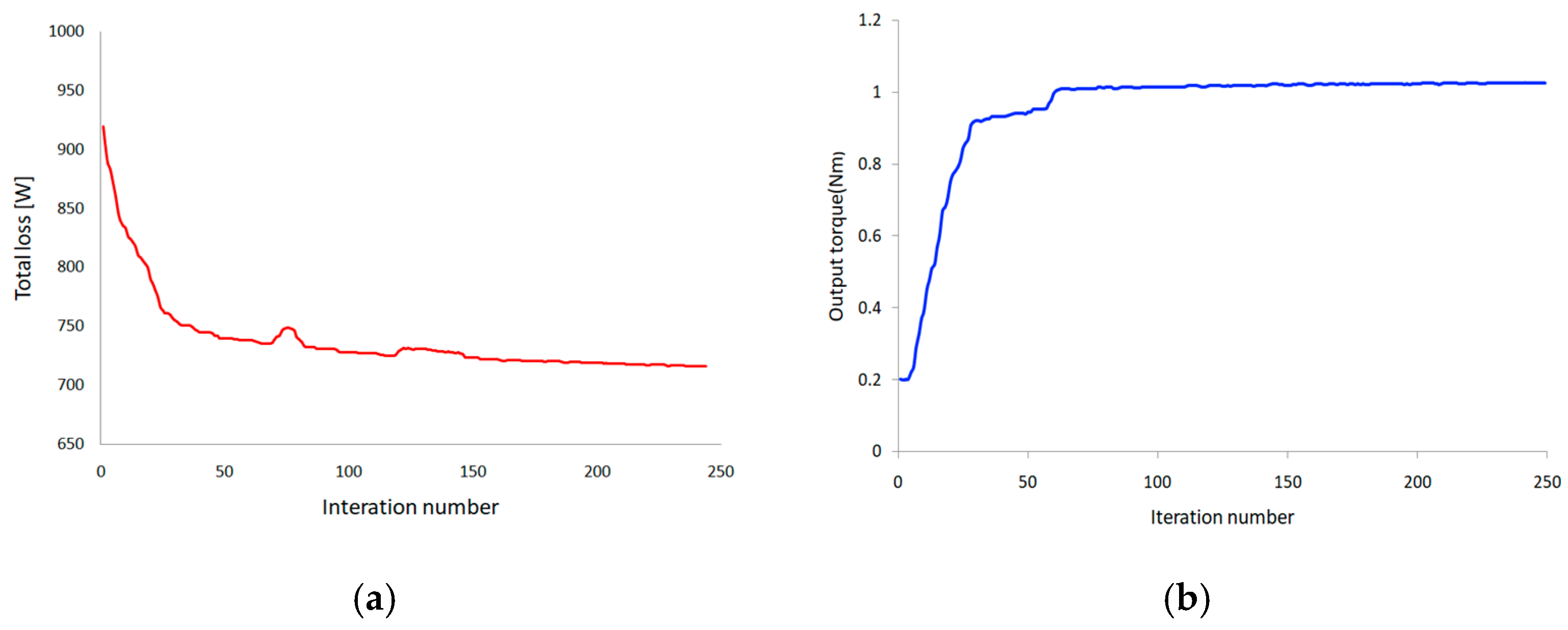
3.3. Optimization Results and Analysis
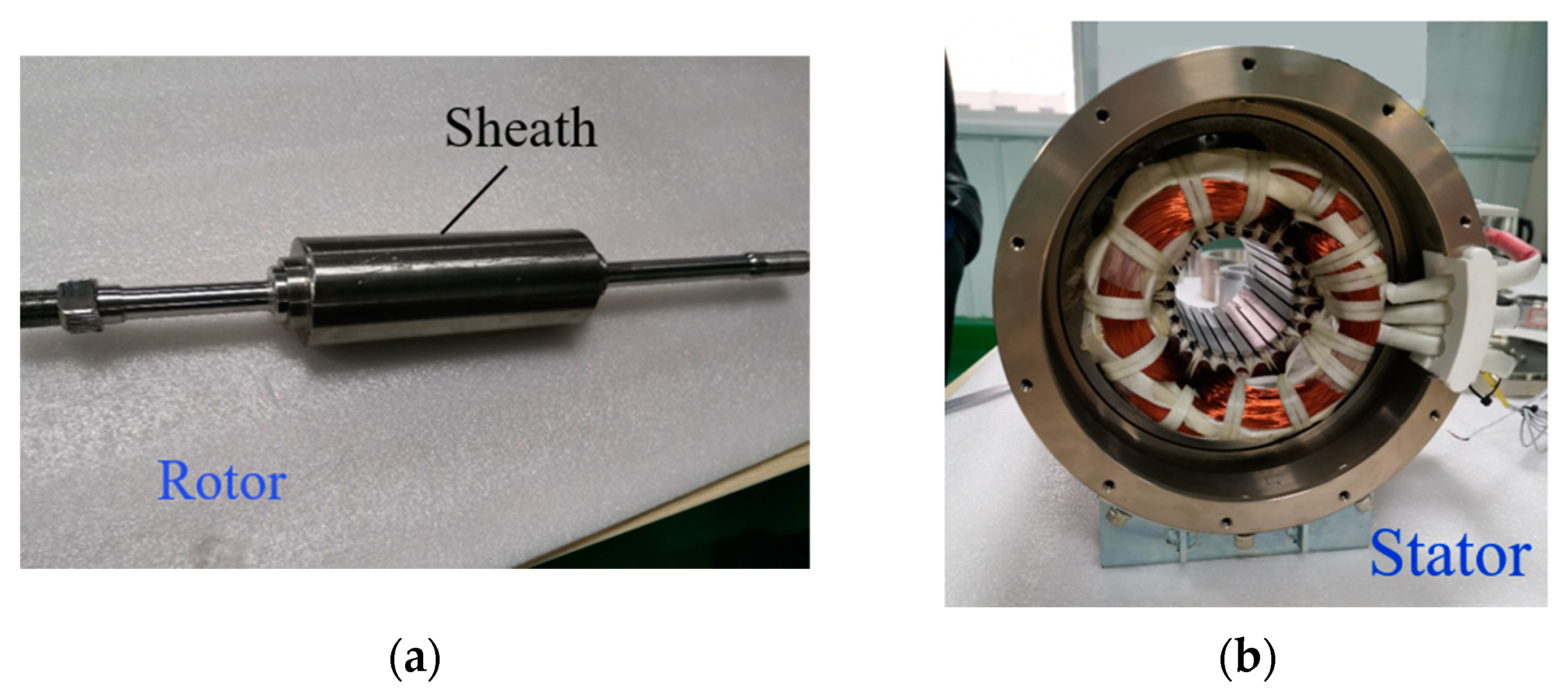
4. Experimental Verification
5. Conclusions
- (1)
- An efficient modeling method based on PNN deep learning was studied. This method constructed the mapping relationship between input structure parameters and the performance of the PMSM. It was able to solve the problem of rapid electromagnetic field prediction in the optimal design of PMSM.
- (2)
- The QBA optimization algorithm was used to determine the optimal structural parameter combination of permanent magnet synchronous motors and obtain the best performance.
- (3)
- The experimental results of the prototype showed that this method is effective and advanced for the structural optimization design of HPMSM.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ahn, J.-H.; Han, C.; Kim, C.-W.; Choi, J.-Y. Rotor Design of High-Speed Permanent Magnet Synchronous Motors Considering Rotor Magnet and Sleeve Materials. IEEE Trans. Appl. Supercond. 2017, 28, 5201504. [Google Scholar] [CrossRef]
- Fang, S.; Liu, H.; Wang, H.; Yang, H.; Lin, H. High Power Density PMSM With Lightweight Structure and High-Performance Soft Magnetic Alloy Core. IEEE Trans. Appl. Supercond. 2019, 29, 0602805. [Google Scholar] [CrossRef]
- Shin, K.H.; Bang, T.K.; Cho, H.W.; Choi, J.Y. Design and Analysis of High-Speed Permanent Magnet Synchronous Generator With Rotor Structure Considering Electromechanical Characteristics. IEEE Trans. Appl. Supercond. 2020, 30, 5204305. [Google Scholar] [CrossRef]
- Bailey, C.; Saban, D.M.; Guedes-Pinto, P. Design of High-Speed Direct-Connected Permanent-Magnet Motors and Generators for the Petrochemical Industry. IEEE Trans. Ind. Appl. 2009, 45, 1159–1165. [Google Scholar] [CrossRef]
- Chen, Y.; Zhou, J.; Fang, Y.; Gao, Y.; Xia, Y. Multi-field coupling finite-element analysis of the temperature rise in permanent magnet synchronous motor applied for high speed train. In Proceedings of the 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 13–16 November 2016. [Google Scholar]
- Cao, H.; Kou, B.; Zhang, D.; Li, W.; Zhang, X. Research on loss of high speed permanent magnet synchronous motor for flywheel energy storage. In Proceedings of the 16th International Symposium on Electromagnetic Launch Technology, Beijing, China, 15–19 May 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Barcaro, M.; Bianchi, N.; Magnussen, F. Permanent-Magnet Optimization in Permanent-Magnet-Assisted Synchronous Reluctance Motor for a Wide Constant-Power Speed Range. IEEE Trans. Ind. Electron. 2011, 59, 2495–2502. [Google Scholar] [CrossRef]
- Jia, Y.-W.; Chen, X.-T.; Yao, C.-B.; Li, X. CEO election optimization algorithm and its application in constrained optimization problem. Soft Comput. 2023, 27, 7363–7400. [Google Scholar] [CrossRef]
- Çelik, E. A powerful variant of symbiotic organisms search algorithm for global optimization. Eng. Appl. Artif. Intell. 2020, 87, 103294. [Google Scholar] [CrossRef]
- Çelik, E.; Öztürk, N.; Arya, Y. Advancement of the search process of salp swarm algorithm for global optimization problems. Expert Syst. Appl. 2021, 182, 115292. [Google Scholar] [CrossRef]
- Çelik, E. IEGQO-AOA: Information-Exchanged Gaussian Arithmetic Optimization Algorithm with Quasi-opposition learning. Knowl.-Based Syst. 2023, 60, 110169. [Google Scholar] [CrossRef]
- Kaplan, O.; Elik, E. Simplified model and genetic algorithm based simulated annealing approach for excitation current es-timation of synchronous motor. Adv. Electr. Comput. Eng. 2018, 18, 75–84. [Google Scholar] [CrossRef]
- Ho, S.L.; Yang, S.; Ni, P.; Huang, J. A Quantum-inspired evolutionary algorithm for multi-objective design. IEEE Trans. Magn. 2013, 49, 1609–1612. [Google Scholar] [CrossRef]
- Li, Y.; Yang, S.; Ren, Z. A methodology based on quantum evolutionary algorithm for topology opti-mization of electromagnetic devices. IEEE Trans. Magn. 2019, 55, 7204004. [Google Scholar] [CrossRef]
- ul Hassan, H.T.; Asghar, M.U.; Zamir, M.Z.; Faiz, H.M.A. Economic load dispatch using novel bat algorithm with quantum and mechanical behavior. In Proceedings of the 2017 International Symposium on Wireless Systems and Networks (ISWSN), Lahore, Pakistan, 19–22 November 2017. [Google Scholar]
- Nguyen, V.V.; Hartmann, D.; König, M. A distributed agent-based approach for simulation-based optimization. Adv. Eng. Inform. 2012, 26, 814–832. [Google Scholar] [CrossRef]
- Chelladurai, S.J.S.; Murugan, K.; Ray, A.P.; Upadhyaya, M.; Narasimharaj, V.; Gnanasekaran, S. Optimization of process parameters using response surface methodology: A review. Mater. Today Proc. 2021, 37, 1301–1304. [Google Scholar] [CrossRef]
- Zhao, W.; Ma, A.; Ji, J.; Chen, X.; Yao, T. Multi objective optimization of a double-side linear Vernier PM motor using response surface method and differential evolution. IEEE Trans. Ind. Electron. 2019, 67, 80–90. [Google Scholar] [CrossRef]
- Çelik, E.; Çavuşoğlu, O.; Gürün, H.; Öztürk, N. Estimation of the Clearance Effect in the Blanking Process of CuZn30 Sheet Metal Using Neural Network−A Comparative Study. Bilişim Teknol. Derg. 2018, 11, 187–193. [Google Scholar] [CrossRef] [Green Version]
- Çelik, E.; Uzun, Y.; Kurt, E.; Öztürk, N.; Topaloğlu, N. A neural network design for the estimation of nonlinear behavior of a magnetically-excited piezoelectric harvester. J. Electron. Mater. 2018, 47, 4412–4420. [Google Scholar] [CrossRef]
- Çelik, E.; Gör, H.; Öztürk, N.; Kurt, E. Application of artificial neural network to estimate power generation and efficiency of a new axial flux permanent magnet synchronous generator. Int. J. Hydrog. Energy 2017, 42, 17692–17699. [Google Scholar] [CrossRef]
- Erraissi, A.; Belangour, A. Data sources and ingestion big data layers: Meta-modeling of key concepts and features. Int. J. Eng. Technol. 2018, 7, 3607–3612. [Google Scholar]
- Khan, A.; Ghorbanian, V.; Lowther, D. Deep learning for magnetic field estimation. IEEE Trans. Magn. 2019, 55, 7202304. [Google Scholar] [CrossRef]
- Khan, A.; Mohammadi, M.H.; Ghorbanian, V.; Lowther, D. Efficiency Map Prediction of Motor Drives Using Deep Learning. IEEE Trans. Magn. 2020, 56, 7511504. [Google Scholar] [CrossRef]
- Puzyrev, V. Deep learning electromagnetic inversion with convolutional neural networks. Geophys. J. Int. 2019, 218, 817–832. [Google Scholar] [CrossRef] [Green Version]
- Canziani, A.; Paszke, A.; Culurciello, E. An analysis of deep neural network models for practical applications. arXiv 2016, arXiv:1605.07678. [Google Scholar]
- Zhang, H.; Shao, J.; Salakhutdinov, R. Deep neural networks with multi-branch architectures are intrinsically less non-convex. In Proceedings of the 22nd International Conference on Artificial Intelligence and Statistics, Naha, Okinawa, Japan, 16–18 April 2019; pp. 1099–1109. [Google Scholar]
- Ou, H.; Qing, C.; Xu, X.; Jin, J. Multi-level context pyramid network for visual sentiment analysis. Sensors 2021, 21, 2136. [Google Scholar] [CrossRef] [PubMed]
- Ma, J.; Dai, Y.; Tan, Y.-P. Atrous convolutions spatial pyramid network for crowd counting and density estimation. Neurocomputing 2019, 350, 91–101. [Google Scholar] [CrossRef]
- He, Q.; Dong, Z.; Chen, F.; Deng, S.; Liang, W.; Yang, Y. Pyramid: Enabling Hierarchical Neural Networks with Edge Computing. In Proceedings of the ACM Web Conference 2022, Virtual, 25–29 April 2022. [Google Scholar] [CrossRef]
- Liu, X.; Lin, Q.; Fu, W. Optimal design of permanent magnet arrangement in synchronous motors. Energies 2017, 10, 1700. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Fu, W.N.; Niu, S. Optimal structure design of permanent magnet motors based on a general pattern of rotor topologies. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Outer stator diameter | 120 mm | Rated speed | 100 krpm |
| Inner stator diameter | 60 mm | Rated power | 10 kW |
| Air gap length | 2 mm | Rated voltage | AC 380 V |
| Axial length | 70 mm | Rated current | 20 A |
| PM thickness | 4 mm | PM type | N38UH |
| Type | Design Parameters | Value Ranges |
|---|---|---|
| Stator | Slot opening width | 0.5–2.0 mm |
| Slot width | 1–2 mm | |
| Tooth tip height | 1–2 mm | |
| Slot depth | 10–20 mm | |
| Rotor | PM width | 3–6 mm |
| PM length (except for surface-mounted type) | 3–10 mm | |
| Magnetic gap length (except for surface-mounted type) | 0.5–2 mm | |
| Angle of magnetic pole (only for surface-mounted type) | 0–3 deg | |
| Pole pair number | 1 or 2 |
| Motor Scheme | Slot Opening Width | Slot Width | Tooth Tip Height | Slot Depth | PM Width | PM Length | Magnetic Gap Length | Pole Pair Number |
|---|---|---|---|---|---|---|---|---|
| Case1 | 0.5 | 1.0 | 1.0 | 10.0 | 3.0 | 3.0 | 0.5 | 1 |
| Case2 | 0.5 | 1.0 | 1.0 | 10.0 | 3.0 | 3.0 | 0.7 | 1 |
| Case3 | 0.5 | 1.0 | 1.0 | 10.0 | 3.0 | 4.0 | 0.5 | 1 |
| Case4 | 0.5 | 1.0 | 1.0 | 10.0 | 4.0 | 3.0 | 0.5 | 1 |
| Case5 | 0.5 | 1.0 | 1.0 | 12.0 | 3.0 | 3.0 | 0.5 | 1 |
| … | … | … | … | … | … | … | … | … |
| Case597 | 1.9 | 1.8 | 2.0 | 18.0 | 5.0 | 9.0 | 1.9 | 2 |
| Case598 | 1.9 | 2.0 | 1.8 | 18.0 | 5.0 | 9.0 | 1.9 | 2 |
| Case599 | 2.0 | 1.8 | 1.8 | 18.0 | 5.0 | 9.0 | 1.9 | 2 |
| Case600 | 2.0 | 2.0 | 2.0 | 20.0 | 6.0 | 10.0 | 2.0 | 2 |
| Motor Scheme | Slot Opening Width | Slot Width | Tooth Tip Height | Slot Depth | PM Width | Angle of Magnetic Pole | Pole Pair Number |
|---|---|---|---|---|---|---|---|
| Case1 | 0.5 | 1.0 | 1.0 | 10.0 | 3.0 | 0 | 1 |
| Case2 | 0.5 | 1.0 | 1.0 | 10.0 | 3.0 | 0 | 1 |
| Case3 | 0.5 | 1.0 | 1.0 | 10.0 | 3.0 | 0 | 1 |
| Case4 | 0.5 | 1.0 | 1.0 | 10.0 | 4.0 | 0 | 1 |
| Case5 | 0.5 | 1.0 | 1.0 | 12.0 | 3.0 | 0 | 1 |
| … | … | … | … | … | … | … | … |
| Case597 | 1.9 | 1.8 | 2.0 | 18.0 | 5.0 | 3 | 2 |
| Case598 | 1.9 | 2.0 | 1.8 | 18.0 | 5.0 | 3 | 2 |
| Case599 | 2.0 | 1.8 | 1.8 | 18.0 | 5.0 | 3 | 2 |
| Case600 | 2.0 | 2.0 | 2.0 | 20.0 | 6.0 | 3 | 2 |
| Parameters | Values |
|---|---|
| Pole pair numbers | 1 |
| Number of slots | 24 |
| Overall diameter (mm) | 200 |
| Outer diameter of stator(mm) | 130 |
| Inner diameter of stator (mm) | 56 |
| Outer diameter of rotor (mm) | 53 |
| Tooth width(mm) | 3.6 |
| Slot depth (mm) | 18 |
| Width of slot opening (mm) | 1.8 |
| Length of stator core (mm) | 40 |
| Thickness of PMs (mm) | 7 |
| Angle of magnetic pole (rad) | 0 |
| Parameters | Stator Core Loss | Copper Loss | Eddy Current Loss | Wind Friction Loss | Stray Loss |
|---|---|---|---|---|---|
| Before optimization | 483 | 53.1 | 44 | 311 | 47 |
| After optimization | 345 | 49.8 | 31 | 300 | 22 |
| Speed (krpm) | Current (A) | Simulation Results of Torque (N·M) | Experiment Results of Torque (N·M) |
|---|---|---|---|
| 20 | 20.4 | 1.055 | 1.1 |
| 30 | 20 | 1.026 | 1.0 |
| 40 | 20 | 1.026 | 1.0 |
| 50 | 20.5 | 1.055 | 1.1 |
| 60 | 20.5 | 1.055 | 1.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Peng, W.; Xie, L.; Zhang, X. Optimization of a Multi-Type PMSM Based on Pyramid Neural Network. Appl. Sci. 2023, 13, 6810. https://doi.org/10.3390/app13116810
Liu X, Peng W, Xie L, Zhang X. Optimization of a Multi-Type PMSM Based on Pyramid Neural Network. Applied Sciences. 2023; 13(11):6810. https://doi.org/10.3390/app13116810
Chicago/Turabian StyleLiu, Xiaoyu, Wenqian Peng, Liuyin Xie, and Xiang Zhang. 2023. "Optimization of a Multi-Type PMSM Based on Pyramid Neural Network" Applied Sciences 13, no. 11: 6810. https://doi.org/10.3390/app13116810