1. Introduction
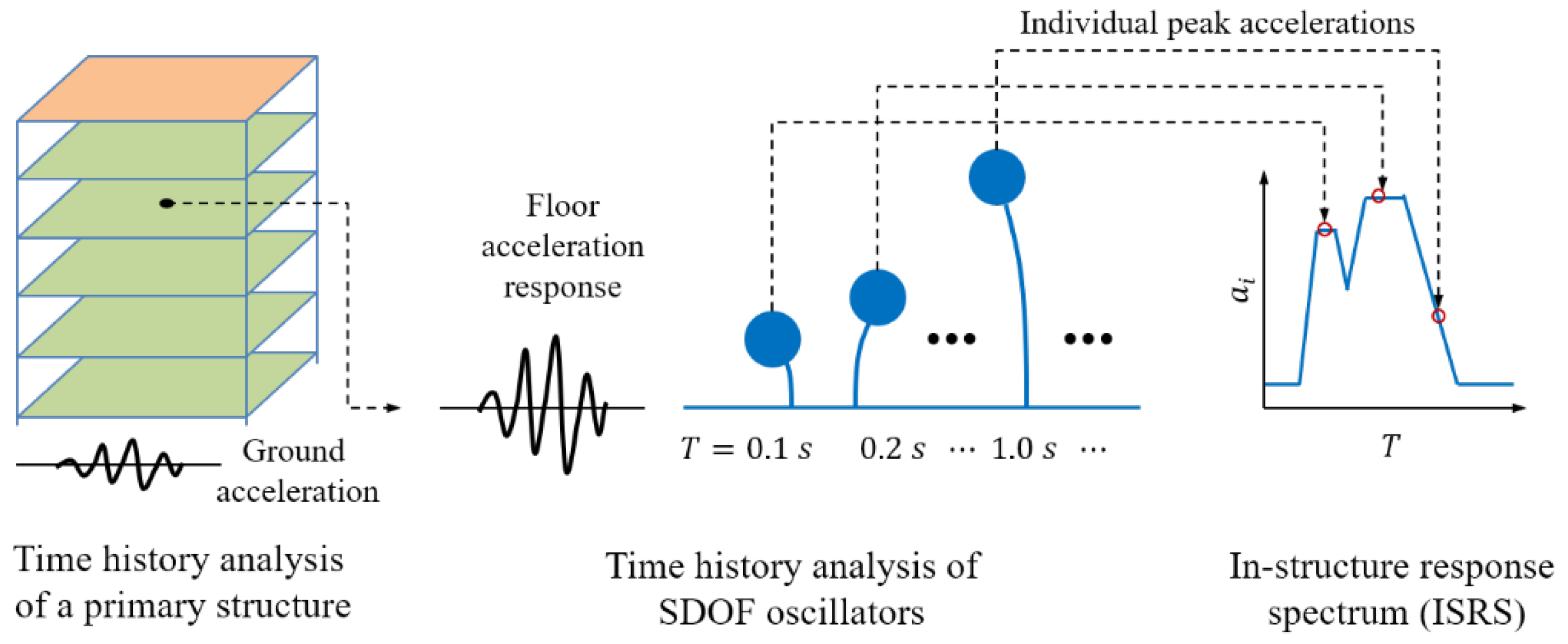
In nuclear power plants (NPPs), a primary system, usually a building or non-building structure, and many secondary systems, usually composed of equipment, are connected to each other. In the design or seismic fragility assessment of equipment installed in a structure, an in-structure response spectrum (ISRS) is used as the input motion for the equipment. The ISRS represents the peak acceleration response of a single-degree-of-freedom oscillator located in a structure excited by ground motions. The ISRS is computed for different natural frequencies of the oscillator and plotted in the form of acceleration versus natural frequency. The procedure for calculating ISRS is presented in
Figure 1. The ISRS is important in the safety evaluation of equipment located in an NPP structure because various equipment has different natural frequencies and the uncertainty in natural frequency is necessary to be considered in the probabilistic safety assessment [
1].
The ISRS is usually computed based on the response acceleration at individual equipment locations obtained using a structural model decoupled from the equipment. Relatively heavy equipment was considered in the analysis by adding only the mass of the equipment to the structural model. However, the ISRS computed based on decoupled analysis may have excessive conservatism compared with coupled analysis, particularly when the equipment and structure interact in resonance [
2]. Therefore, excessive conservatism in the ISRS by decoupled analysis leads to a conservative design of the equipment, which increases rigidity and causes more frequent vibrations, making the components of the equipment more vulnerable to fatigue failure [
3]. In addition, the ISRS obtained from the decoupled analysis has a limitation in that it can yield inaccurate equipment responses that may be non-conservative [
4]. ASCE/SEI 4–16, which addresses the seismic analysis of NPPs, requires a coupled analysis when the structural response differs by more than 10% and provides graphical criteria based on the mass and frequency ratios between the primary and secondary systems to determine whether a coupled analysis is required [
5]. The USNRC allows decoupled analysis under several conditions, such as highly flexible support connecting the structure and equipment [
6]. Apart from the dynamic characteristics of the primary structure, soil parameter uncertainty may influence significantly the ISRS [
7]. In the case of more general building structures, the influence of the inelastic structural behavior on the ISRS was investigated [
8].
To obtain the ISRS through flexible analysis, it is necessary to analyze many coupled systems, each comprising the same primary system and a single degree of freedom (SDOF) oscillator representing the secondary system. The natural frequency of the oscillator differs for each coupled system and corresponds to the frequency in the abscissa of the ISRS. The fundamental methodology of the coupled analysis considering the equipment–structure interaction was established in the past. Gupta (1996), and Gupta and Gupta (1995) proposed an analytical method for transforming the eigenvalues and eigenvectors of multi-degree-of-freedom (MDOF) subsystems to obtain the modal characteristics of the coupled system [
3,
4]. Jiang et al. (2015) and Li et al. (2015), Wang et al. (2022) developed and validated a direct-spectra-to-spectra method to compute the ISRS directly from the response spectrum of the ground motion based on the modal combination of the coupled system [
9,
10,
11]. These methods have the disadvantage of being limited to modal analysis. As the modal characteristics of the coupled system change whenever the natural frequency of the secondary system change, the response of the entire system must be recalculated correspondingly. On the other hand, Tseng (1989) derived a transfer function between the acceleration response of the decoupled primary structure and that of the secondary system comprising a coupled system [
12]. Choi and Lee (2005) validated Tseng’s method by comparison with the coupled analysis result for an NPP containment building connected to an SDOF oscillator [
13]. Tseng’s method was derived by serially connecting the dynamic stiffnesses of the primary structure and the secondary system, but the acceleration response of the decoupled primary structure is not applied to the connection between the secondary and primary systems but to the boundary between the primary system and ground. So, the analytical model is difficult to explain physically.
Recently, the interaction impact on the response of equipment in NPPs has been investigated. It was reported that the ISRS computed through decoupled analysis significantly increased in the proximity of the dominant natural frequency of the primary structure, a containment building in this case, compared to the coupled analysis [
13]. Perez et al. (2015) computed ISRSs at different locations of a reinforced concrete building using a finite element (FE) model and investigated the difference between the ISRSs computed by coupled and decoupled analysis, respectively [
2]. Cho and Gupta (2020) applied the methodology of Gupta (1995) to the lumped mass stick (LMS) model of an NPP structure to investigate the reduction of the ISRS by coupled analysis [
3,
14]. Kwag et al. (2022) build a coupled analysis model based on the LMS model of an NPP containment building and investigated response reduction effects obtained by coupled analysis [
15]. Jayarajan compared the responses of coupled and decoupled analyses for petrochemical facilities [
16]. Dubey et al. (2019) investigated the response reduction effect of coupled analysis at various locations and equipment masses in an NPP auxiliary building using a three-dimensional FE model [
17]. In EPRI 3002009429, Tseng’s coupled analysis method using transfer functions was applied to an idealized structure in which only slabs have flexibility while the other components are rigid [
18]. The coupled analysis effect was greater in the vertical direction than in the horizontal direction because the mass ratio of the equipment to the modal mass was large in the local vibration mode of the slabs. Model fidelity makes difference in the accuracy of ISRS [
19]. Some researchers utilized shaking table test results to validate model adequacy and ISRS. Jha et al. (2017) investigated the influence of inelastic deformation on the ISRS and showed that an equivalent linear model of a shaking table test specimen produced an ISRS matching test results [
20]. Rahman et al. (2022) investigated the influence of location on the floor response using a three-dimensional FE model updated to fit the shaking table test result of a reinforced concrete building specimen [
21]. Although they considered equipment-structure interaction in the analysis, their approach was based on the repeated analysis of a model with entire DOFs.
In this study, a two-degree-of-freedom (two-DOF) equation of motion was derived in the frequency domain using a substructuring technique for efficiently calculating ISRS considering the equipment–structure interaction. The ISRS of the auxiliary building was efficiently calculated using only a single calculation of the impedance function and structural response conducted for the decoupled primary system. Repeated analyses of the coupled model for different equipment frequencies were conducted using the model with only two DOFs, instead of analyzing the coupled model with full DOFs. Compared to the transfer function method, the proposed two-DOF model enables clear physical interpretation and computes the response of the primary structure at once in addition to the secondary system response.
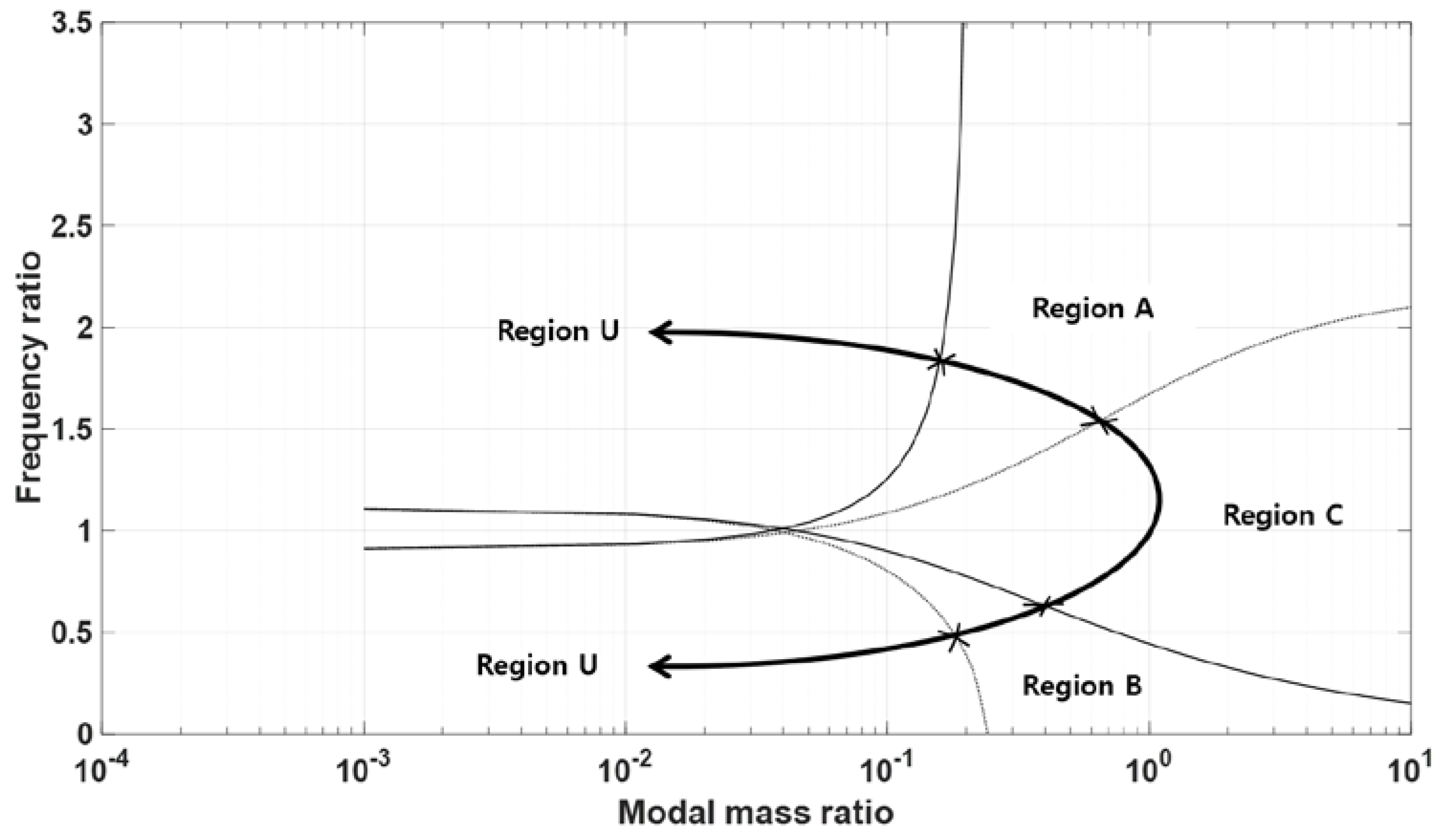
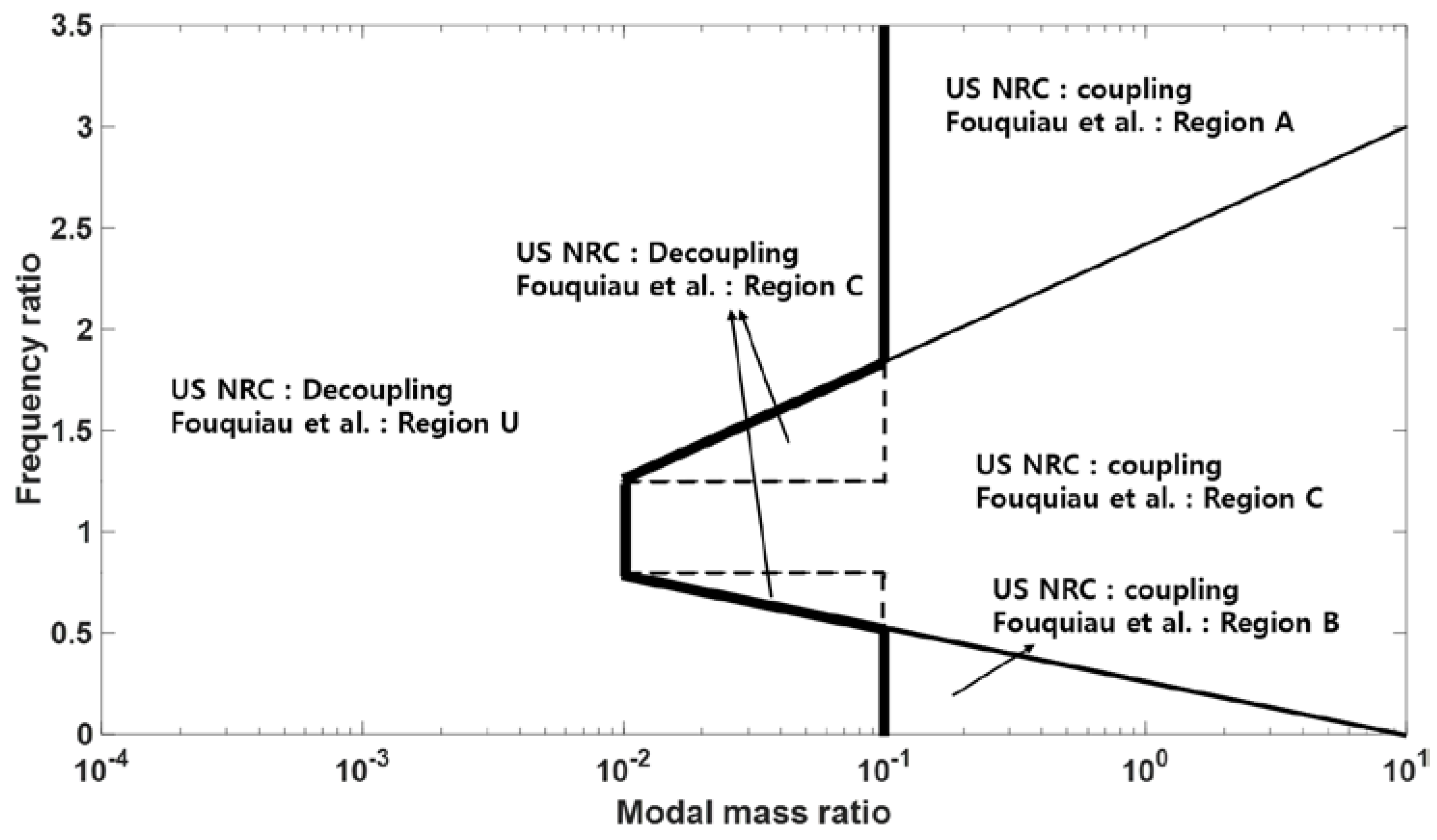
Apart from the coupled analysis technique, decoupling criteria is another important issue in equipment-structure interaction. Therefore, the adequacy of the three decoupling criteria was investigated in this study. Two representative decoupling criteria adopted in ASCE/SEI 4–16 and NUREG-75/087, respectively, were applied to the design of NPP and the other criteria recently developed by Fouquiau et al. (2018) were adopted in this study [
5,
22,
23]. All the criteria were developed based on the simplified coupled systems of which both primary system and secondary systems are modeled with SDOF systems. However, the validation of those criteria using complex NPP structures is hard to find. A recent study by Jung et al. (2020) investigated all three criteria but their study was limited to simple systems with only a single DOF [
24]. This study investigated the adequacy of those three decoupling criteria using an auxiliary building model and the proposed coupled analysis technique and proposed improved criteria by combining two of those.
In
Section 2, the coupled analysis method using the two-DOF equation of motion is presented in the frequency domain. In
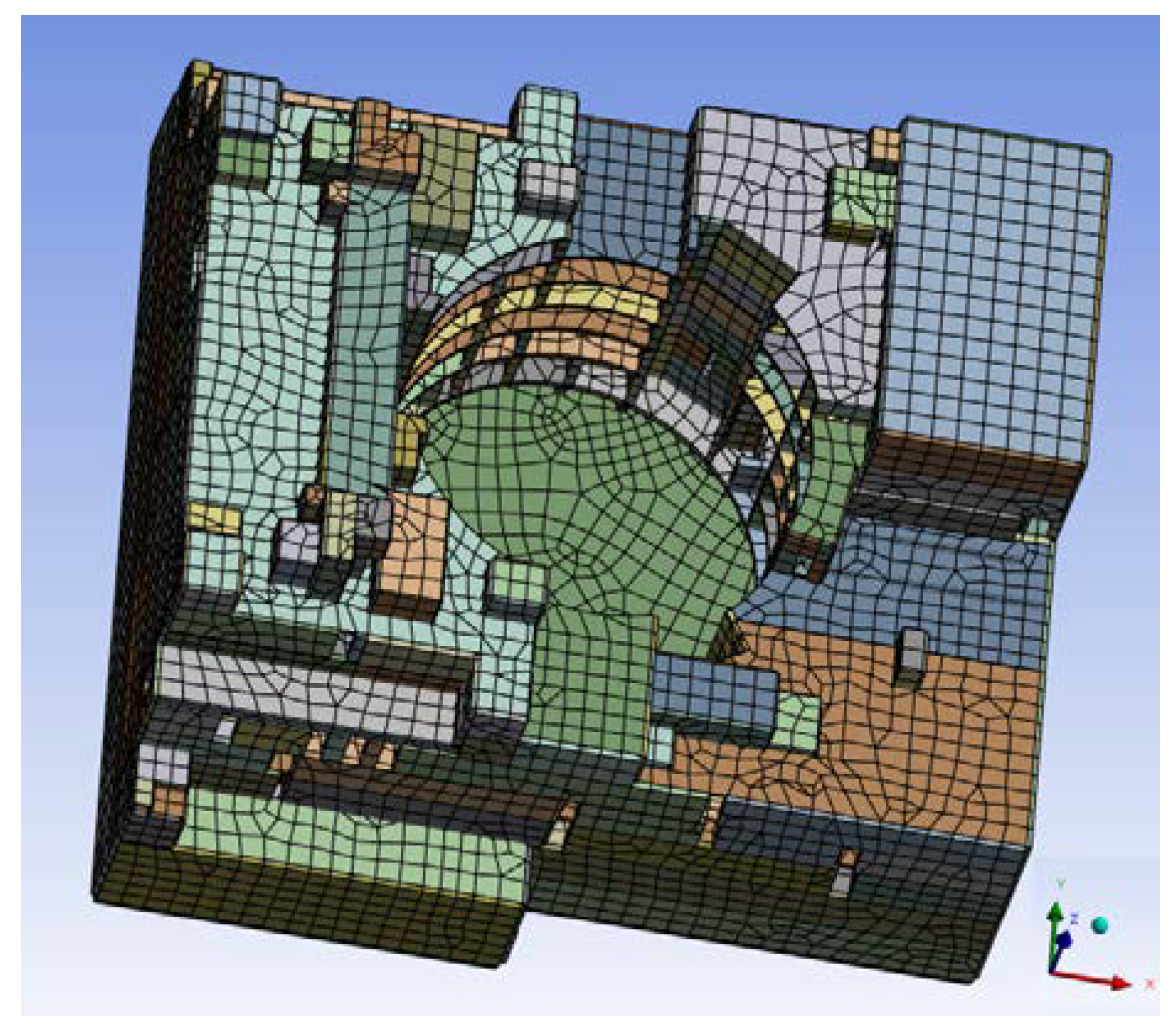
Section 3, the FE model of an auxiliary building in an NPP is built using commercial FE analysis software for validating the proposed method to calculate ISRS and investigating the equipment–structure interaction effect on the ISRS of NPP structures with a large mass. In
Section 4, ground motions applied to the numerical analysis are described in detail. In
Section 5, the ISRS obtained using the proposed coupled analysis method and the analysis using the coupled model with full DOFs were compared for verification. The impact of the equipment–structure interaction on the ISRS was investigated through a parametric study, in which the location of the equipment, the direction of the equipment motion, the mass ratio between the equipment and building structure, the damping ratio of the equipment, and stiffness change due to cracking were considered. Finally, in
Section 6, the adequacy of the three representative criteria using the modal mass ratio and frequency ratio to determine the necessity of coupled analysis was investigated by applying the criteria to the example auxiliary building and combined criteria are proposed.
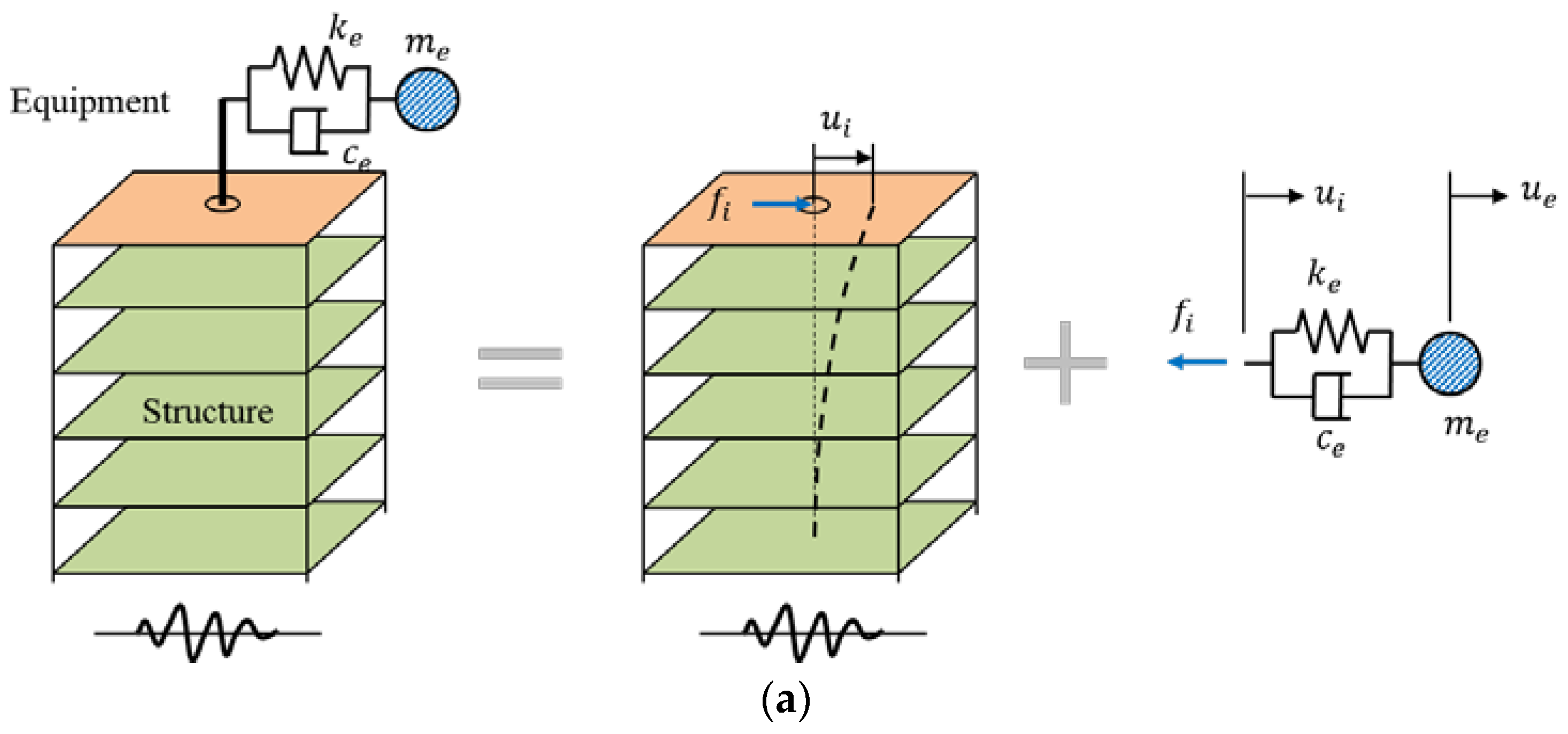
2. Equation of Motion for a Structure Coupled with an Equipment
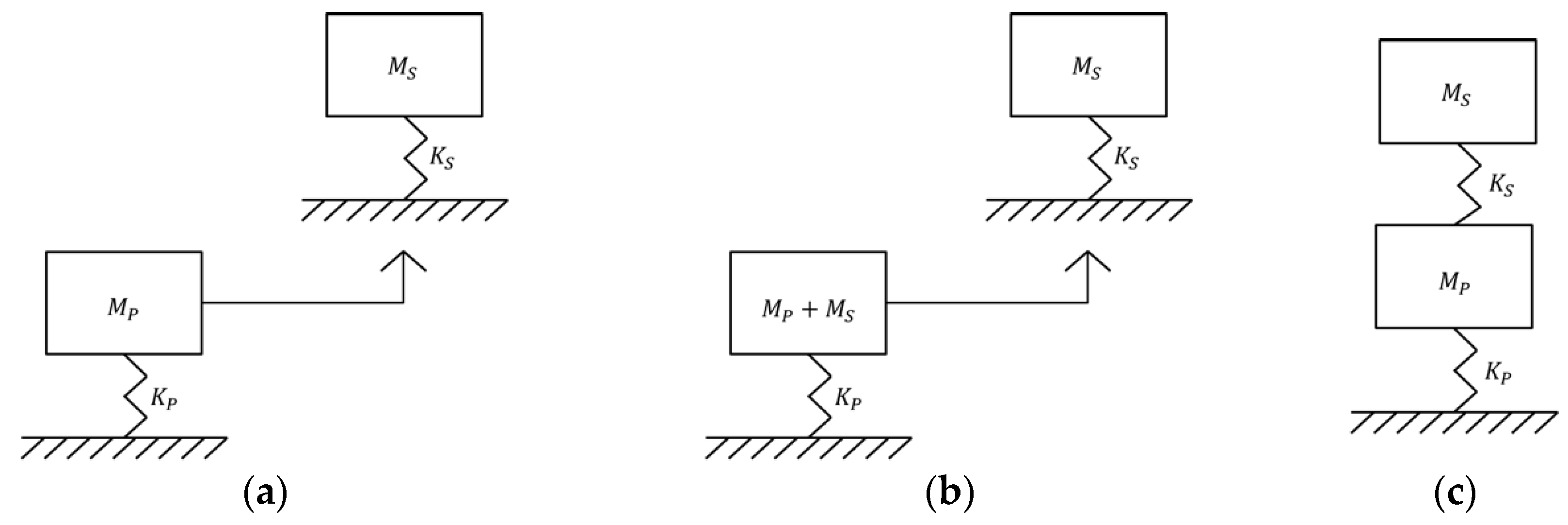
The equations of motion for a structure coupled with equipment are formulated assuming that the primary system is an MDOF structure, and the equipment is represented by an SDOF oscillator, as shown in
Figure 2a. The equations of motion for the equipment and structure are expressed by Equations (1) and (2), respectively, as follows:
where
is the displacement at the interface between the equipment and structure;
,
and
are the displacements of the equipment and structure, interaction force between the equipment and structure, and ground acceleration, respectively. In addition,
,
and
are the mass, damping coefficient, and stiffness of the equipment, respectively;
, and
are the mass of the structure;
,
,
and
are the damping of the structure;
,
,
and
are the stiffness of the structure; and the subscripts
and
indicate the DOFs at the interface of the equipment and the structure, and the other DOFs in the structure, respectively.
Equations (1) and (2) can be transformed into Equations (3) and (4), which are defined in the frequency domain using Fourier transform.
where
is the circular frequency;
is the imaginary number; and
,
and
are the Fourier transforms of
,
,
,
and
, respectively. The frequency-dependent dynamic characteristics of the equipment and structure are combined with the dynamic stiffnesses corresponding to each DOFs so that Equations (3) and (4) are rewritten as follows:
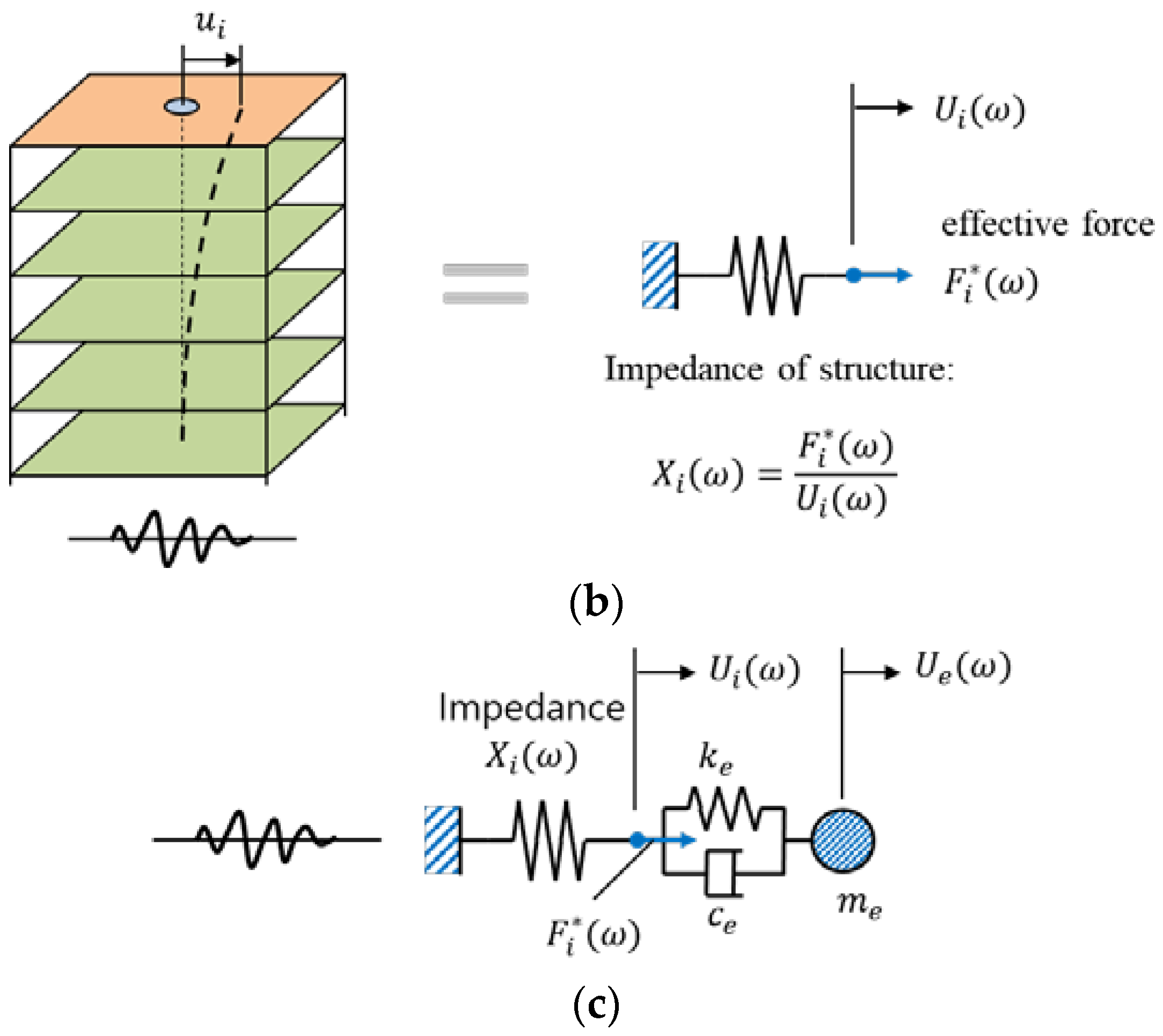
The equation of motion for the structure without equipment, as shown in
Figure 2c, can be expressed as Equation (7), which is transformed into Equation (8) in the frequency domain and simplified as Equation (9).
where
is the displacement vector of the structure and
is the displacement at the node to which the equipment is connected. By subtracting Equation (8) from Equation (6), the relation between the equipment–structure interaction force and the corresponding displacement change at the equipment–structure interface is derived as Equation (14) as follows:
where
is the impedance function of the structure expressed as
Equation (4), the equation of motion considering the equipment–structure interaction, can be rewritten as Equation (16) by substituting
with Equation (14). Equation (16) can be rewritten as a two-DOF equation of motion in the frequency domain, as shown in Equation (17), and the corresponding solution can be obtained as Equation (18).
where
is the effective force that can reproduce the structural response at the interface only caused by the ground motion. The displacements of the structure at the interface and the equipment,
and
, can be calculated using Equation (18), and the relative and absolute accelerations of the equipment can be calculated as follows:
Equation (17) represents the condition in which the effective force
acts on the two-DOF system illustrated in
Figure 2b, where the main structure is replaced by the impedance represented by Equation (15). The impedance
and displacement
used to compute
are not dependent on the characteristics of the equipment, as those variables are determined from the equation of motion for the structure itself and its response. Therefore, repeated analyses of the two-DOF system shown in
Figure 2b, changing the stiffness of the equipment, allows for the efficient calculation of ISRS considering the equipment–structure interaction effect without repeated analysis of the MDOF coupled model with full DOFs.
4. Ground Motion
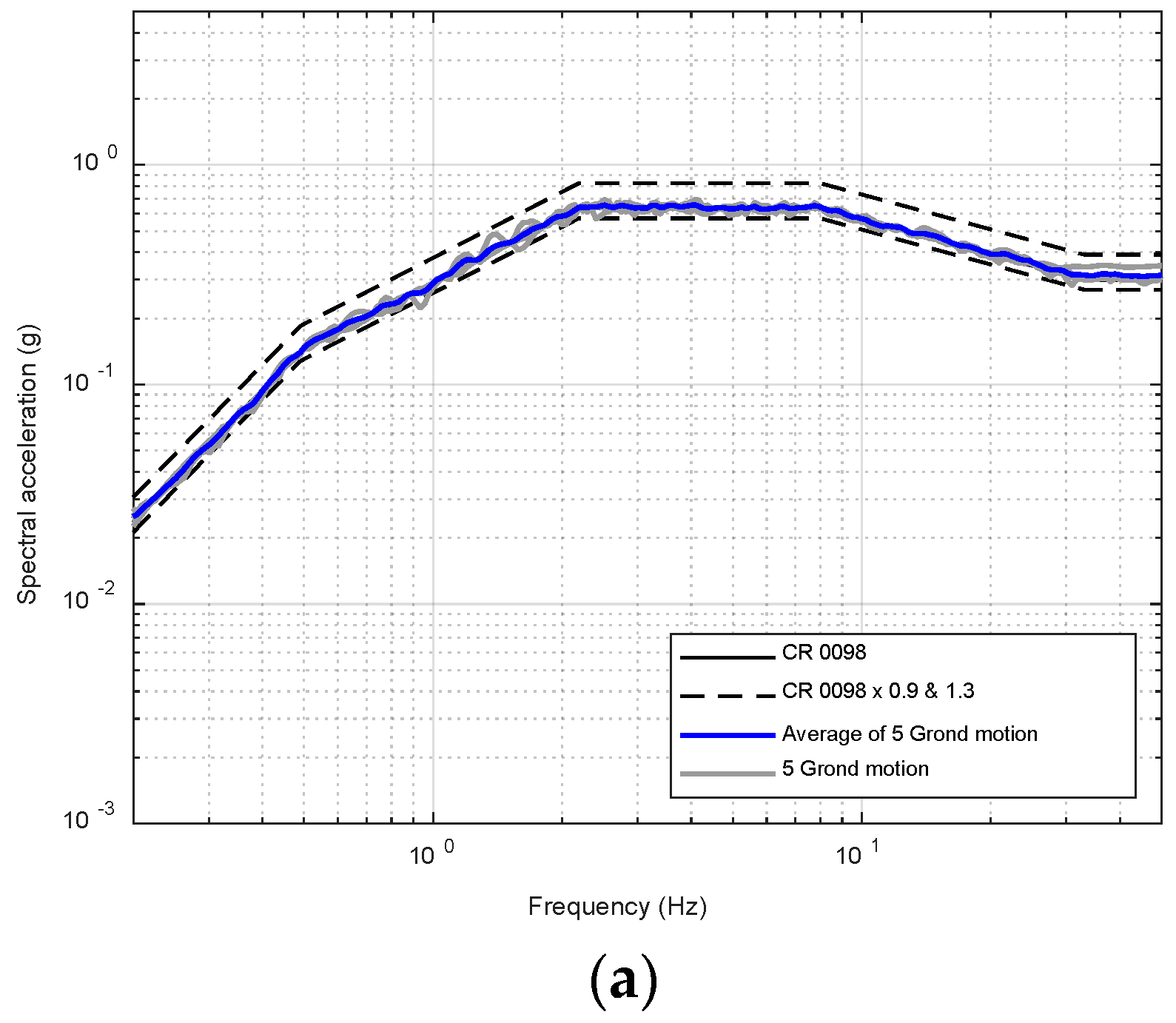
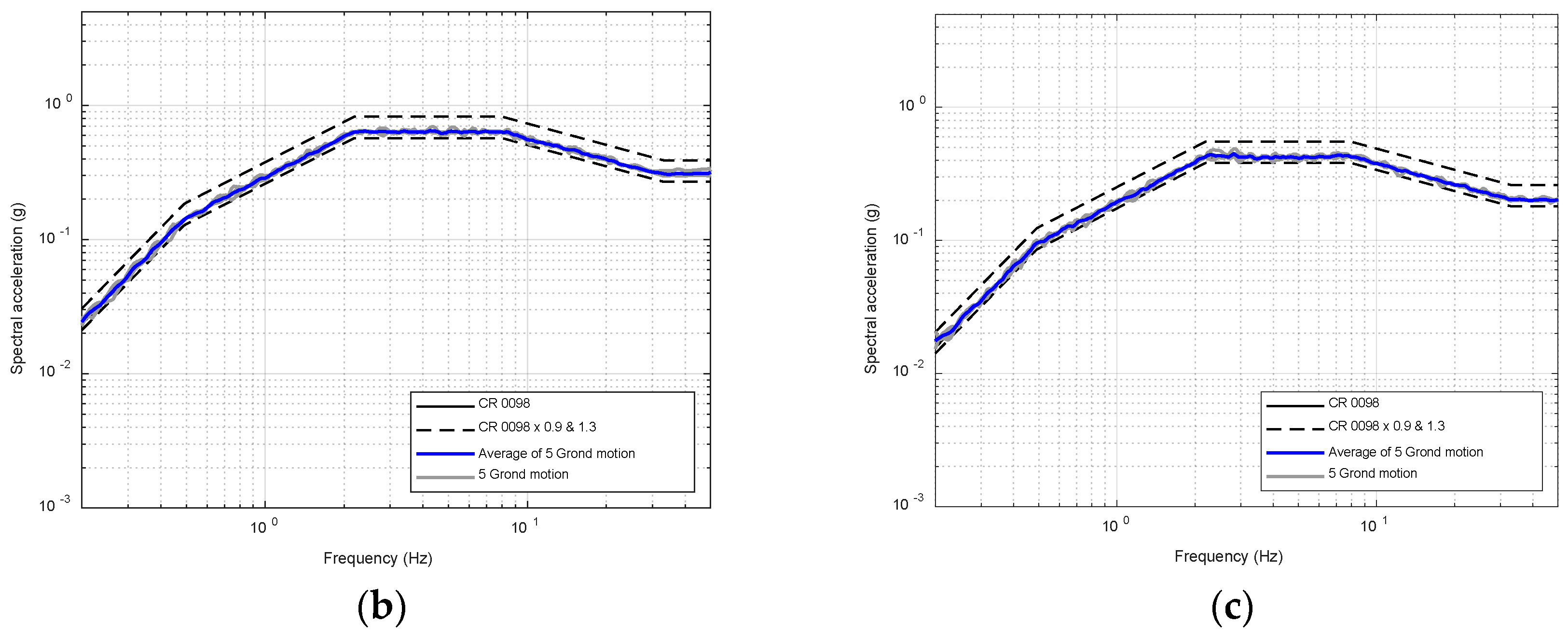
The seismic input to the auxiliary building structure was developed through a site response analysis to consider the site amplification effects. The median response spectrum shape for the 5% damping ratio defined in NUREG/CR-0098 (Newmark and Hall 1978) was adopted as the target response spectrum of bedrock motions [
33]. The response spectrum was anchored to a maximum ground acceleration of 0.3 g. The site condition was assumed to be rock, defined by V/A = 36 in·s/g and AD/V
2 = 6.0, where A is the peak ground acceleration, V is the peak ground velocity, and D is the peak ground displacement D. The target response spectrum of the bedrock is plotted in
Figure 5.
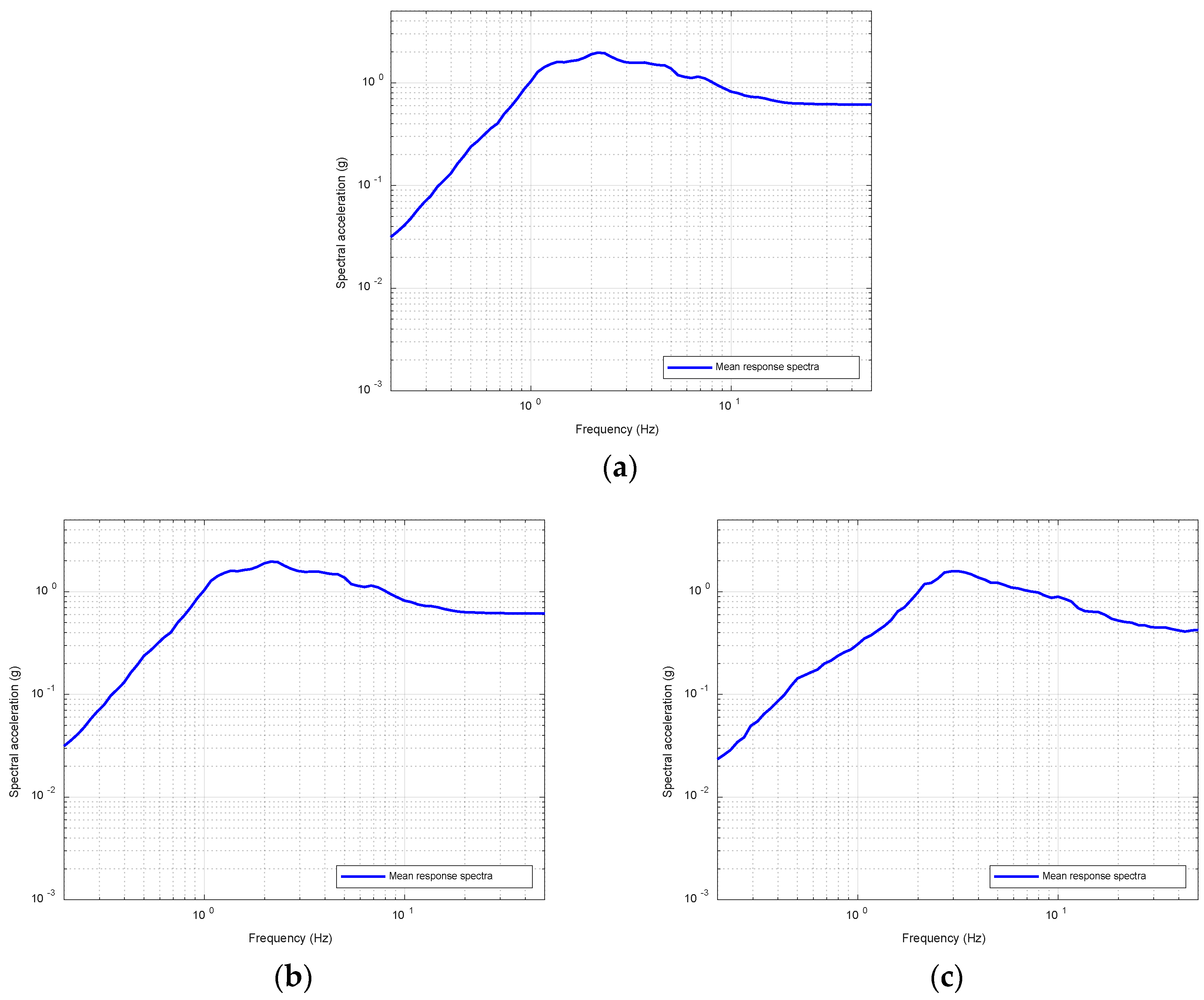
Spectral matching of the recorded ground motions was performed on the target response spectrum. Seed ground motions were selected from a total of 89 sets available from the list of ground motions that are appropriate for matching a rock site with the characteristics of the central and eastern United States (CEUS) presented in NUREG/CR-6728. The selected ground motion sets were matched to the target spectrum, and the five sets with the least change in the waveform were selected. See Jeon et al. (2022) for the detailed selection process [
34]. The selected ground motions are listed in
Table 3. The mean response spectrum of the five matched ground motions in each direction so that it is between the upper and lower bound defined by 1.3 and 0.9 times the target response spectrum, respectively, as shown in
Figure 5 [
35].
Site response analysis was performed for the shear wave velocity profile S1, one of several profiles applied to the design of the auxiliary building of the APR 1400 nuclear power plant. The free-field surface ground motions from the site response analysis were used as seismic inputs to the base of the structure to calculate the ISRS at a number of locations. In addition, the average response spectrum at the ground surface, as shown in
Figure 6, was applied to the crack evaluation analysis described above.
5. In-Structure Response Spectra
5.1. Dynamic Analysis
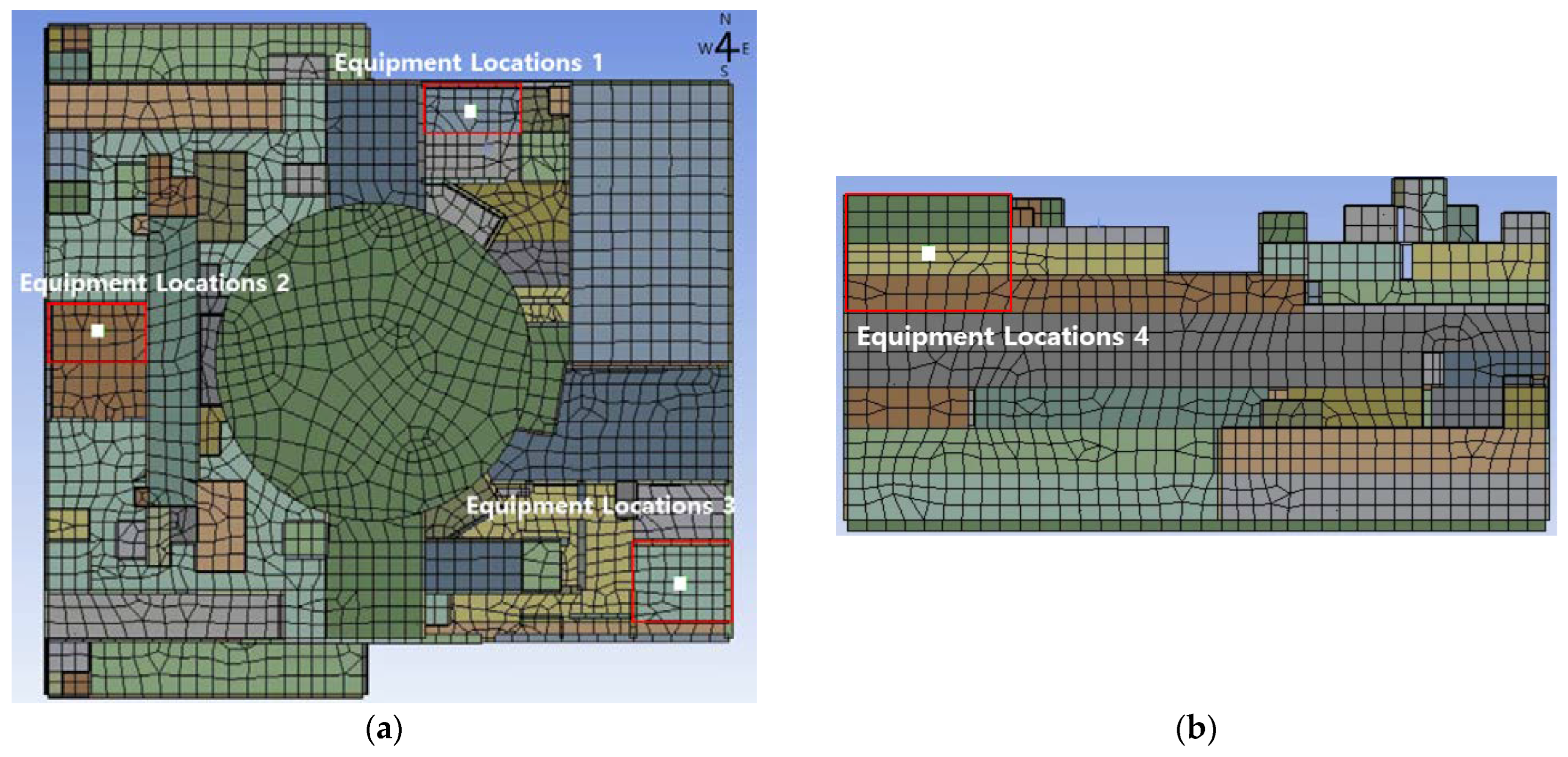
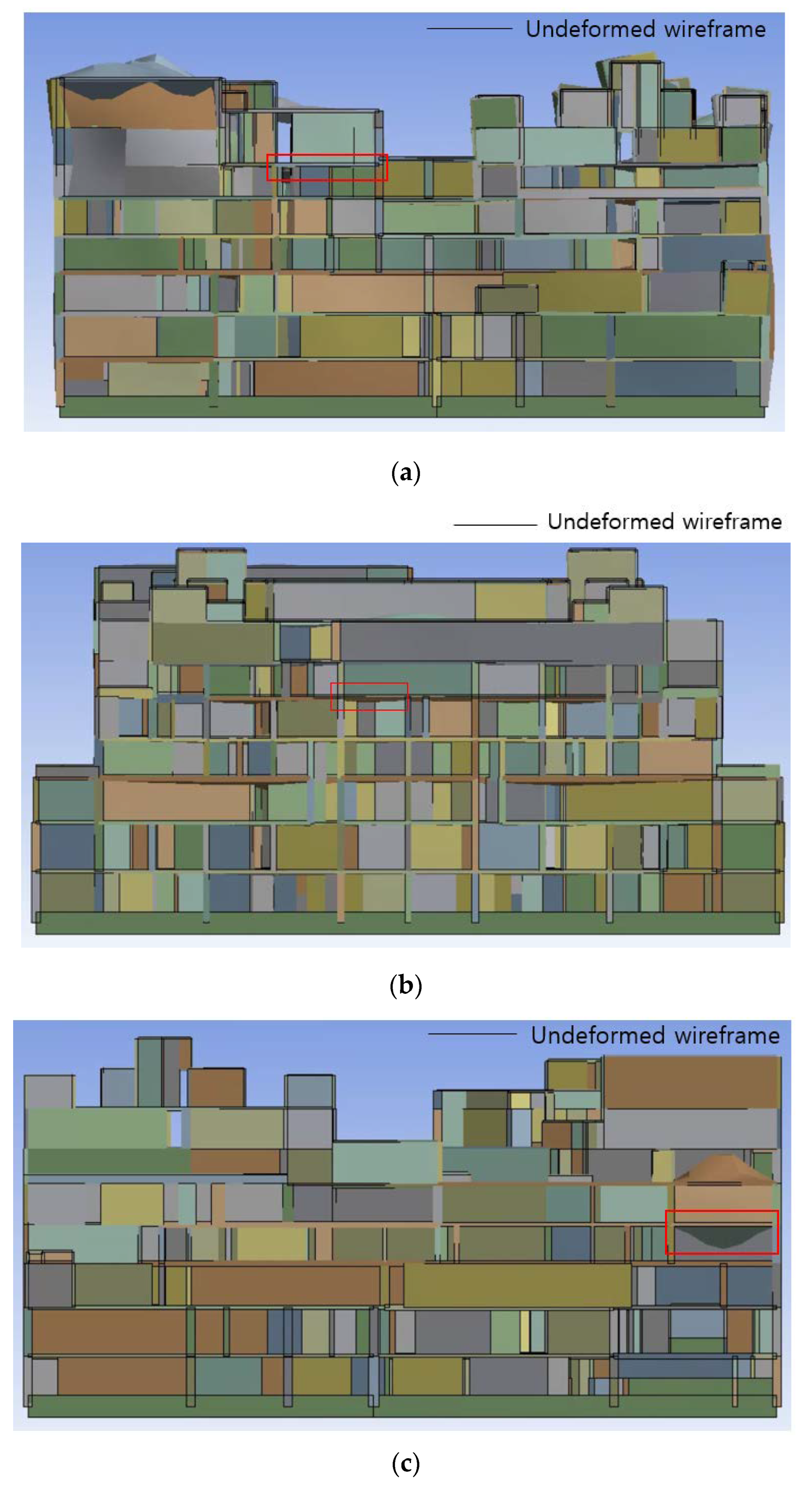
Three slabs and a wall were selected for the location of the equipment where the ISRS was computed, as marked with red boxes in
Figure 7. Considering that it is reported that the out-of-plane local vibration has a remarkable equipment–structure interaction effect, a slab with a larger span and a wall with a taller clear height were selected. The ISRS was calculated for two horizontal directions and one vertical direction at the center of each selected slab or wall. The three components of the ground motion were assumed to act simultaneously. Modal time-history analysis was performed using the Newmark method with an assumption of constant acceleration, and a total of 1783 vibration modes were included. The block Lanczos eigenvalue extraction method was adopted for large symmetric eigenvalue problems [
36]. The time increment was set as 0.005 s. The mass of the equipment was assumed as 1%, 0.1%, and 0.01% of the entire building mass.
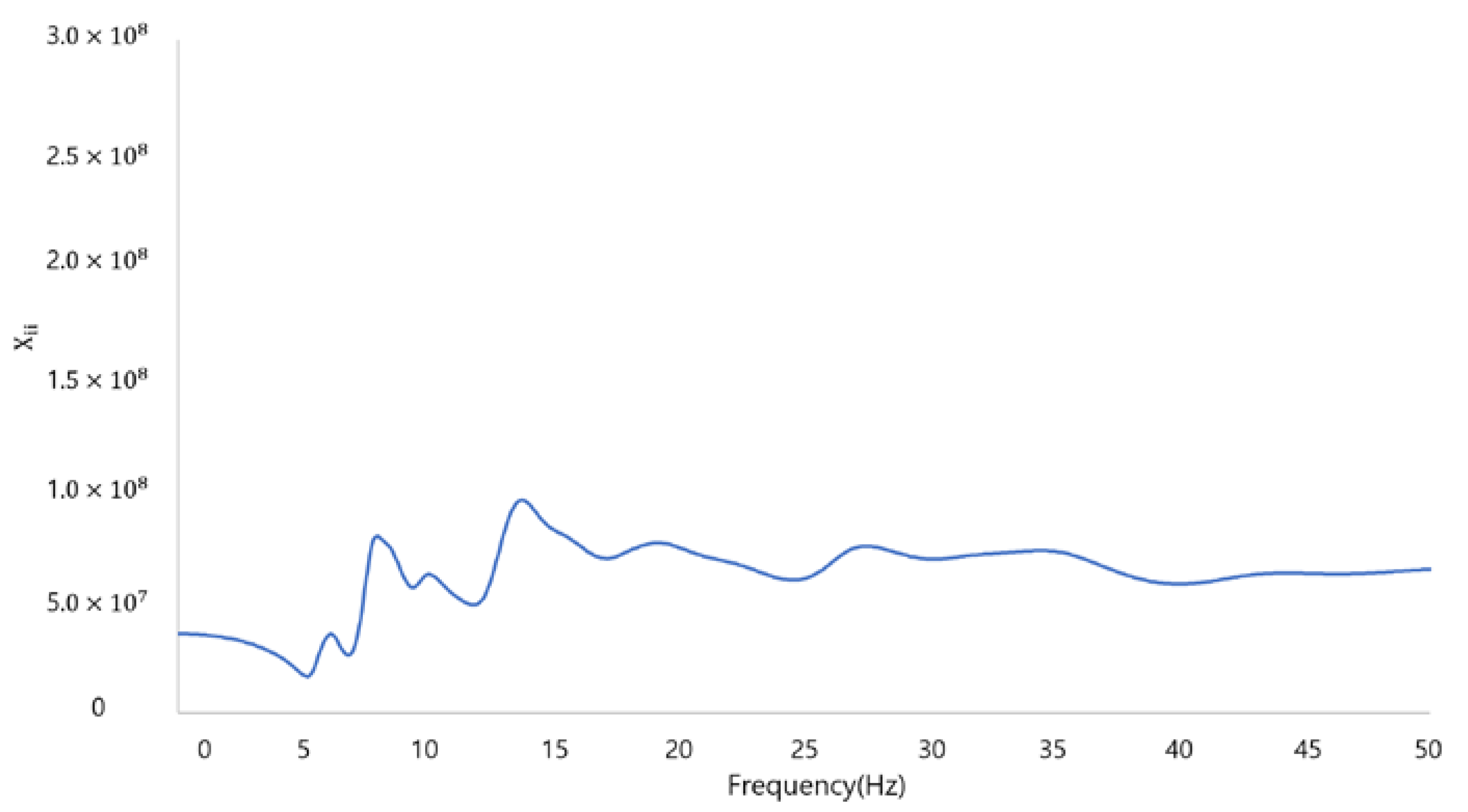
Both decoupled ISRS that does not consider the equipment–structure interaction and coupled ISRS that considers the equipment–structure interaction were calculated and compared at the selected equipment locations. The decoupled ISRS was calculated based on the response acceleration at each equipment location, which was obtained from the response analysis of the auxiliary building decoupled from the equipment represented by Equation (7) using ANSYS. The coupled ISRS was calculated directly as the acceleration response of the coupled two-DOF model represented by Equation (18) using the MATLAB code. For this procedure, the mechanical impedance expressed by Equation (15) was calculated as the inverse of the complex displacement response at the equipment location to the complex harmonic force with unit amplitude at the same node using ANSYS. The mechanical impedance at equipment location 1 in the H1 direction is plotted in
Figure 8. It is noted that all ISRS in this study were calculated at frequencies from 0 to 20 Hz with an increment of 0.01 Hz. The equipment frequency was varied by changing the equipment stiffness keeping the equipment mass constant. The mechanical impedance of the primary structure was calculated up to 50 Hz, which is higher than the Nyquist frequency of the 20 Hz oscillator, with an increment of 0.1 Hz.
5.2. Procedure to Calculate ISRS
The overall procedure to calculate ISRS through coupled analysis using a two-DOF system in the frequency domain proposed in this study can be summarized as follows.
Step (1) Uncoupled response analysis of primary structure: Time history analysis of the primary structure is performed for a given ground motion set comprised of two horizontal and one vertical accelerogram and the relative displacement and absolute acceleration responses at the equipment location and in the direction of interest are calculated.
Step (2) Calculation of mechanical impedance: Harmonic analysis of the primary structure is performed for a unit harmonic force acting at the equipment location and in the direction for which the ISRS is calculated. The displacement response is calculated for the same DOF as the input force. The mechanical impedance of the primary structure is calculated as the ratio of the input force to the output displacement at each frequency.
Step (3) Calculation of input to coupled analysis: Fourier transformation of the relative displacement response at the equipment location obtained in Step 1 and the ground acceleration in the direction of interest is performed. Then, the input force to the two-DOF model, , is calculated using Equation (19) in the frequency domain.
Step (4) Coupled analysis using the two-DOF model: Coupled analysis of the two-DOF system is performed using Equation (18) in the frequency domain. The absolute acceleration of the equipment is calculated using Equation (20). Then, the absolute acceleration of the equipment is transformed into the time domain by inverse Fourier transform and the peak absolute acceleration is determined.
Step (5) Calculation of ISRS: Step 4 is repeated for different equipment frequencies where the ISRS is defined. The calculated peak accelerations are plotted with respect to the equipment frequency.
In addition, the following procedure was used to calculate ISRSs using decoupled analysis for comparison in this study.
Step (A) Decoupled analysis using SDOF system: Time history analysis of an SDOF system representing equipment is conducted in the time domain for the base excitation defined by the absolute acceleration response at the equipment location and in the direction of interest calculated in Step 1 for the coupled analysis procedure.
Step (B) Calculation of ISRS: Step A is repeated for different equipment frequencies where the ISRS is defined. The relationship between the peak acceleration of the equipment and the equipment frequency is plotted.
Using a computer with a 32-core CPU and 128-GB RAM, the two-DOF system analysis in the frequency domain spent 65 sec to compute an ISRS corresponding to 200 natural frequencies for a 36-sec-long ground motion set. However, one execution of the modal time history analysis using the full FE model of the auxiliary building with an SDOF oscillator spent 6060 sec. Moreover, the modal time history analysis shall be repeated for 200 natural frequencies of the equipment, which result in 200 × 6060 sec = 337 h. Therefore, the two-DOF system analysis is much more efficient than the conventional coupled analysis using a full FE model.
5.3. Verification of In-Structure Response Spectra and Primary Structure Response
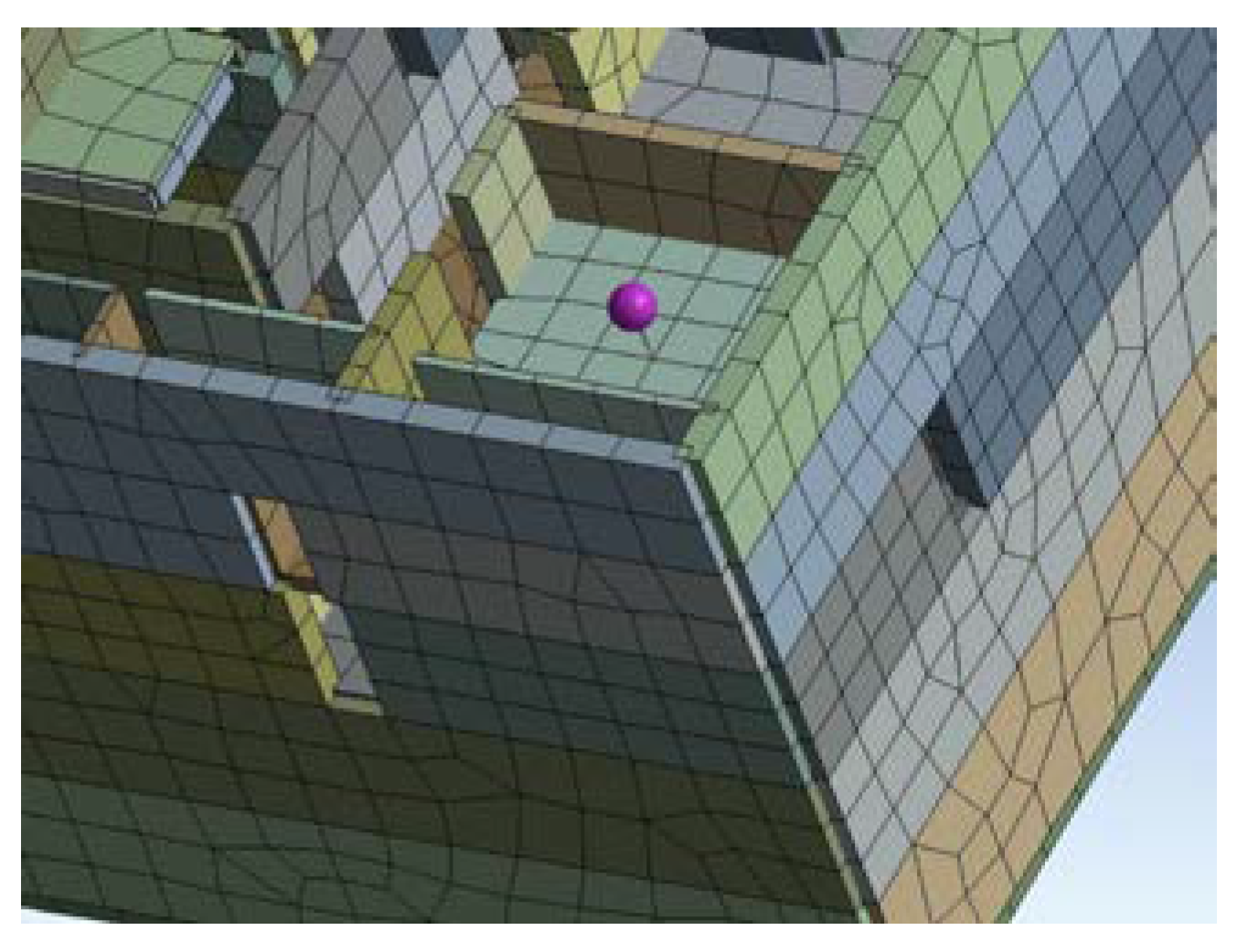
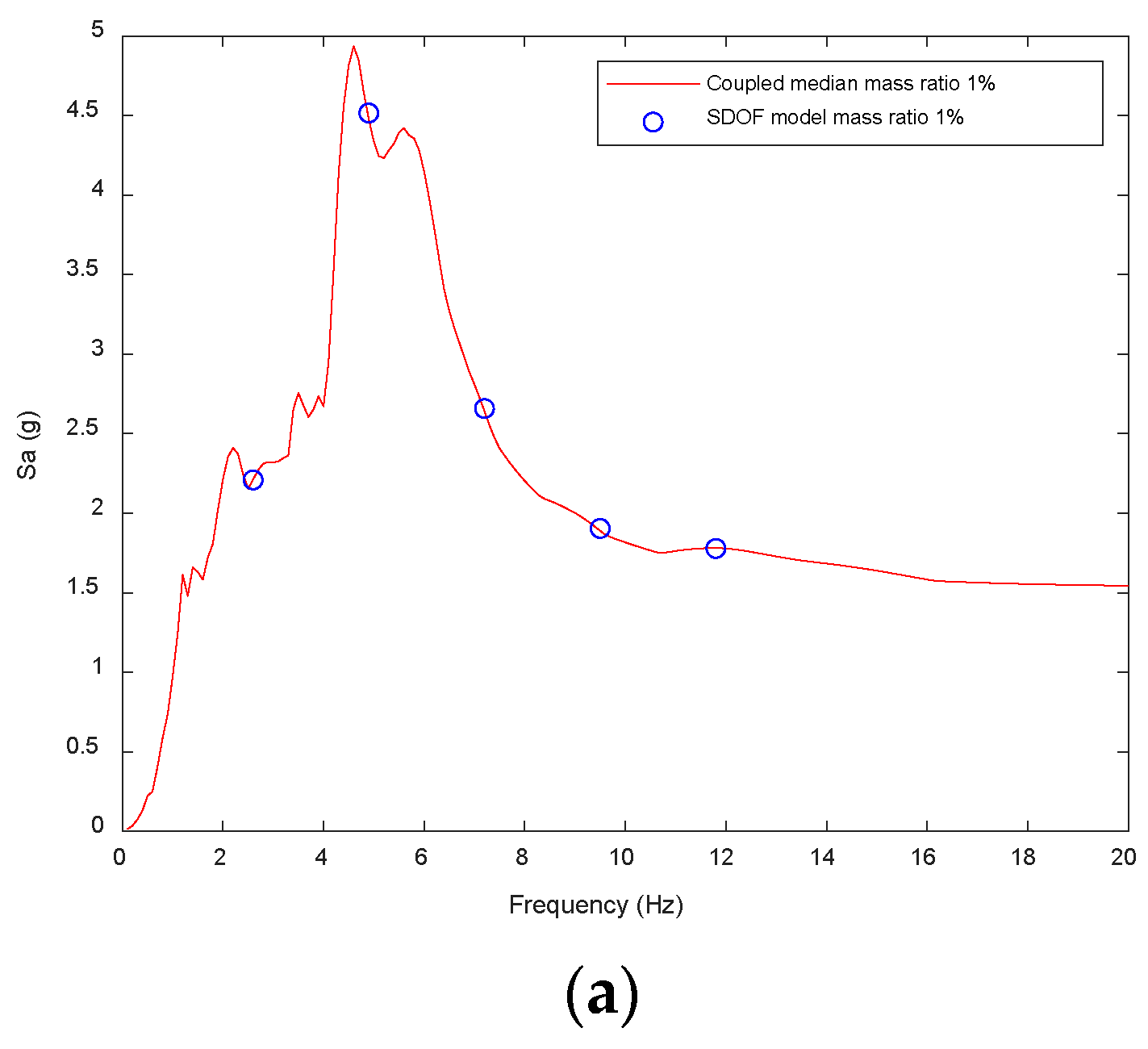
To verify the proposed method for calculating the coupled ISRS, an SDOF oscillator was added to the FE model of the auxiliary building. Using this augmented model, the maximum absolute acceleration response of the added mass in the direction of interest was calculated using time history analysis for the same seismic input. The response of the augmented model was compared with the coupled ISRS obtained by the substructure method for two-DOF analysis in the frequency domain. Verification was performed for the H2- and V-directions at equipment location 2 and the V-direction at equipment location 3.
Figure 9 shows the SDOF oscillator located at equipment location 3.
The mass of the SDOF oscillator corresponded to 1% of the entire building mass. Five frequencies were chosen for the frequency of the SDOF oscillator: 2.6, 4.9, 7.2, 9.5 and 11.8 Hz for equipment location 2 in the H2 direction so that the overall tendency of the coupled ISRS, including the frequency at the peak, could be outlined. Different material damping ratios of 7% and 5% were applied to the shell elements of the building and the spring of the oscillator, respectively. The resulting numerical model has the characteristic of non-classical damping; therefore, the time history analysis and harmonic analysis for this verification were performed using the direct integration method. The Newmark method with a constant acceleration assumption was applied as in
Section 5.2.
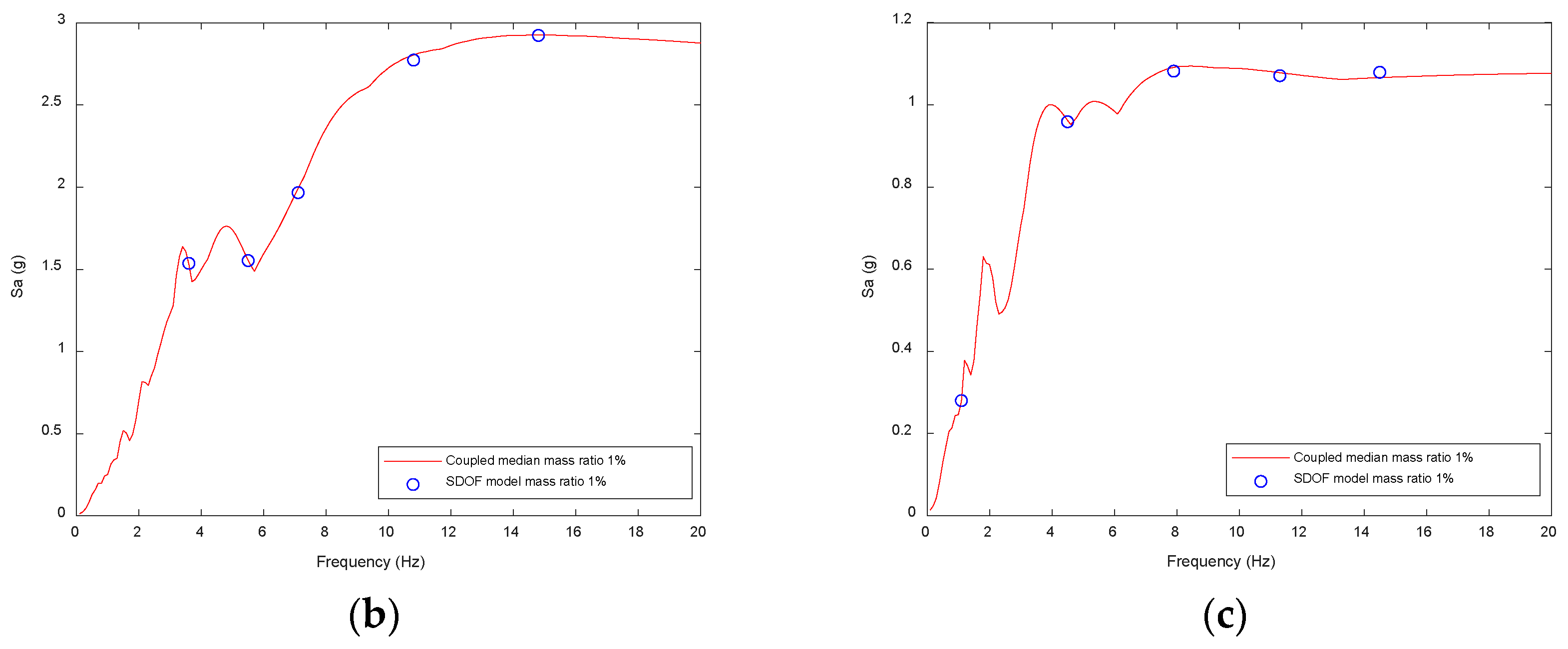
Figure 10 compares the coupled response and ISRS obtained using the substructure technique for different positions and directions. The response acceleration values calculated using the two methods were almost identical at each frequency. Therefore, it can be observed that the two-DOF system analysis using the substructure technique in the frequency domain has sufficient accuracy.
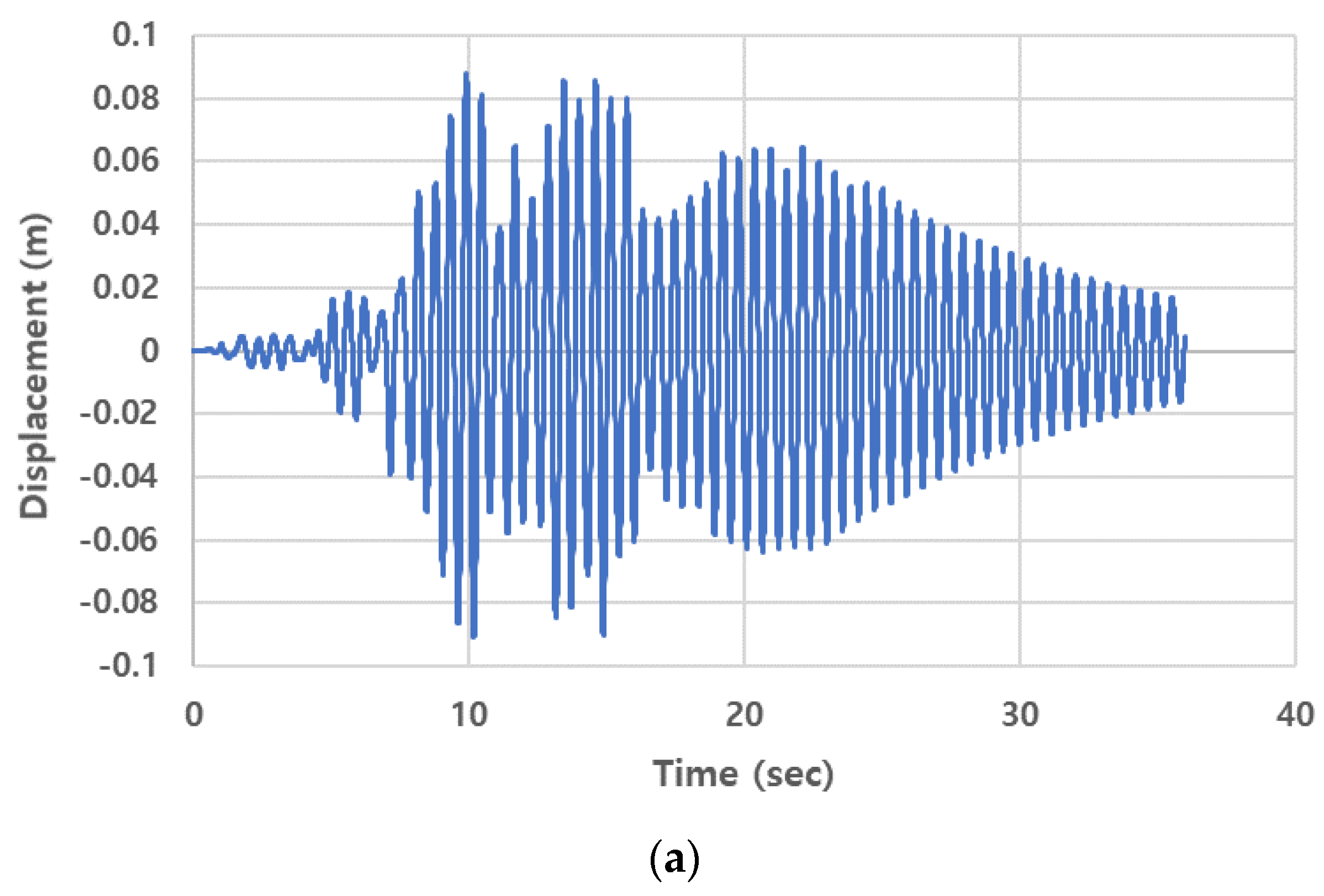
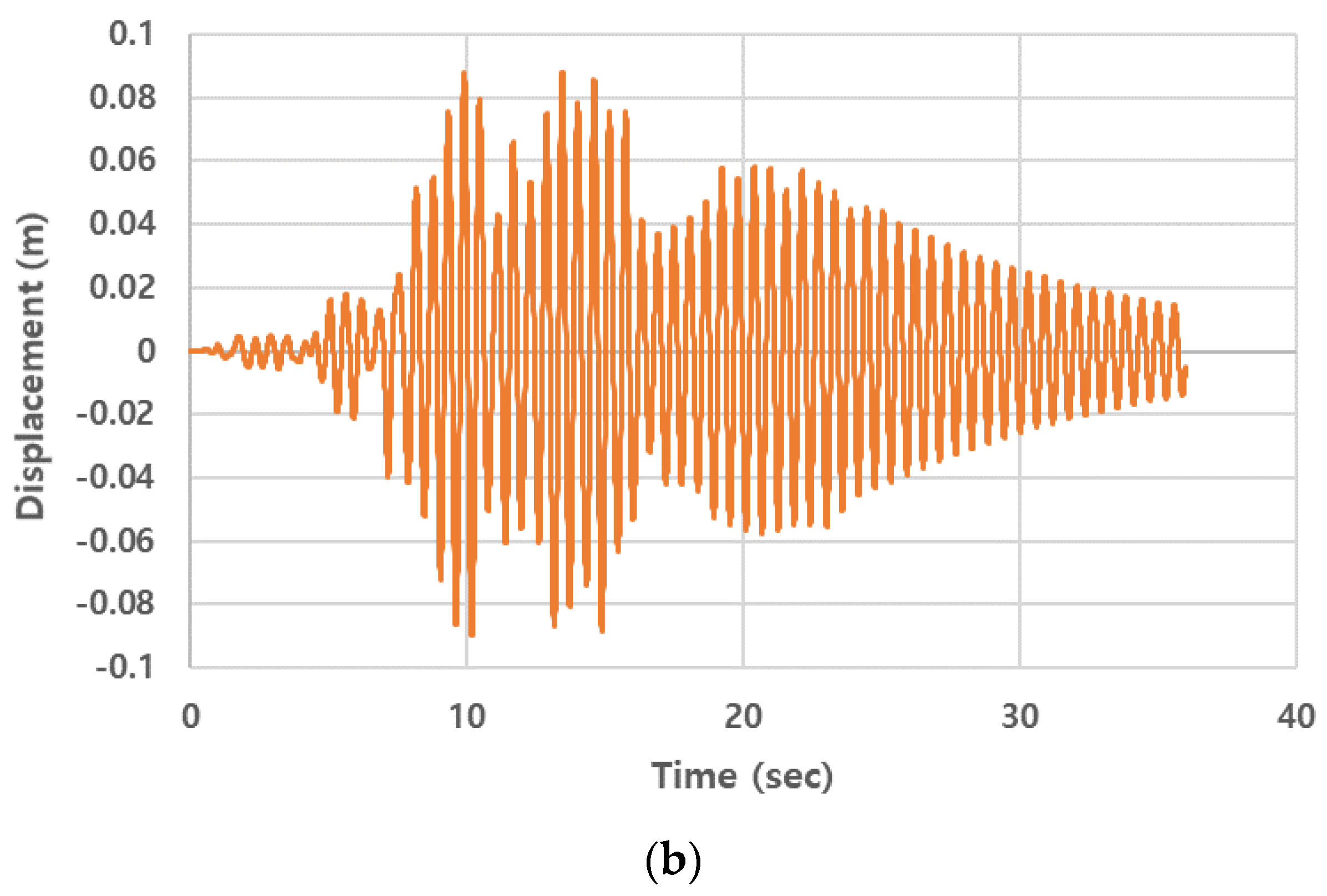
The two-DOF system yields the displacement response of the primary structure in addition to the acceleration response of the secondary system. Among the conditions applied to
Figure 10, an oscillator with a 1% mass ratio and 14.5 Hz frequency in the vertical DOF at equipment location 3 was chosen for validation. The displacement of the primary structure at equipment location 3 in the vertical direction was calculated by using the two-DOF system in the frequency domain as well as the full FE model with an SDOF oscillator. The displacement response histories obtained by the two models are almost identical as shown in
Figure 11. The peak displacements of the time histories in
Figure 11 are 0.08811 m and 0.08815 m, which are almost the same. So, the two-DOF system can yield the primary system response with sufficient accuracy.
5.4. Effect of Equipment Mass
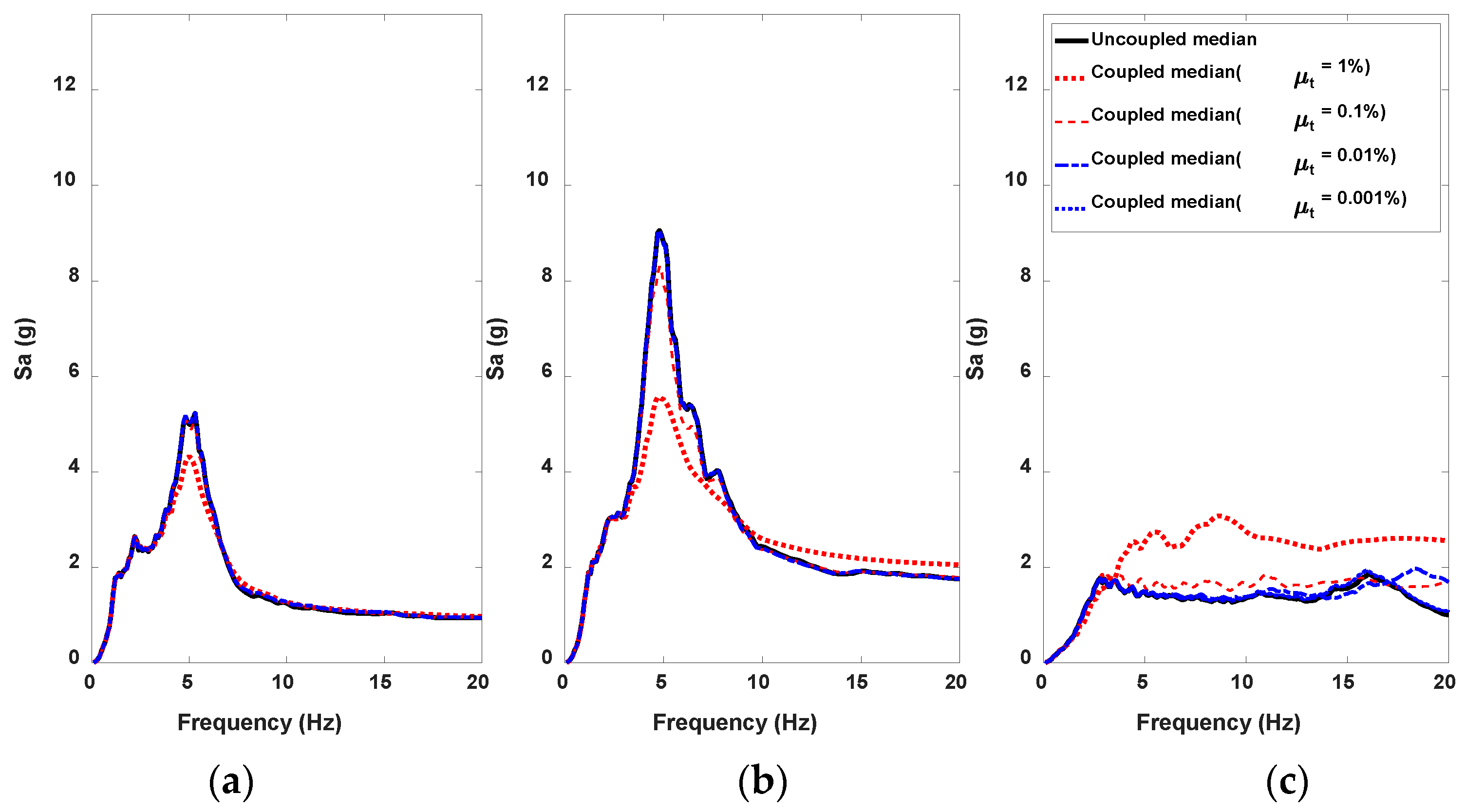
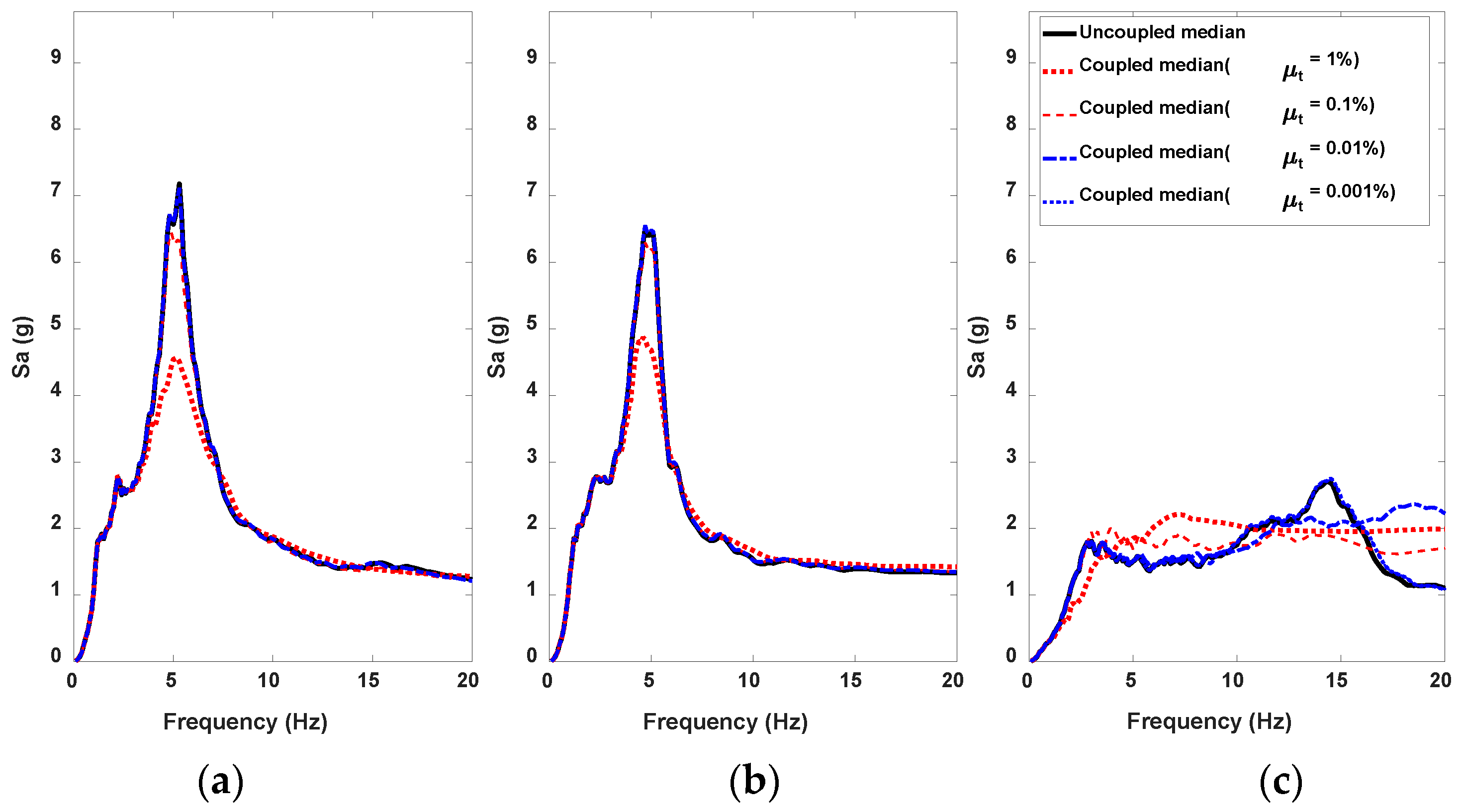
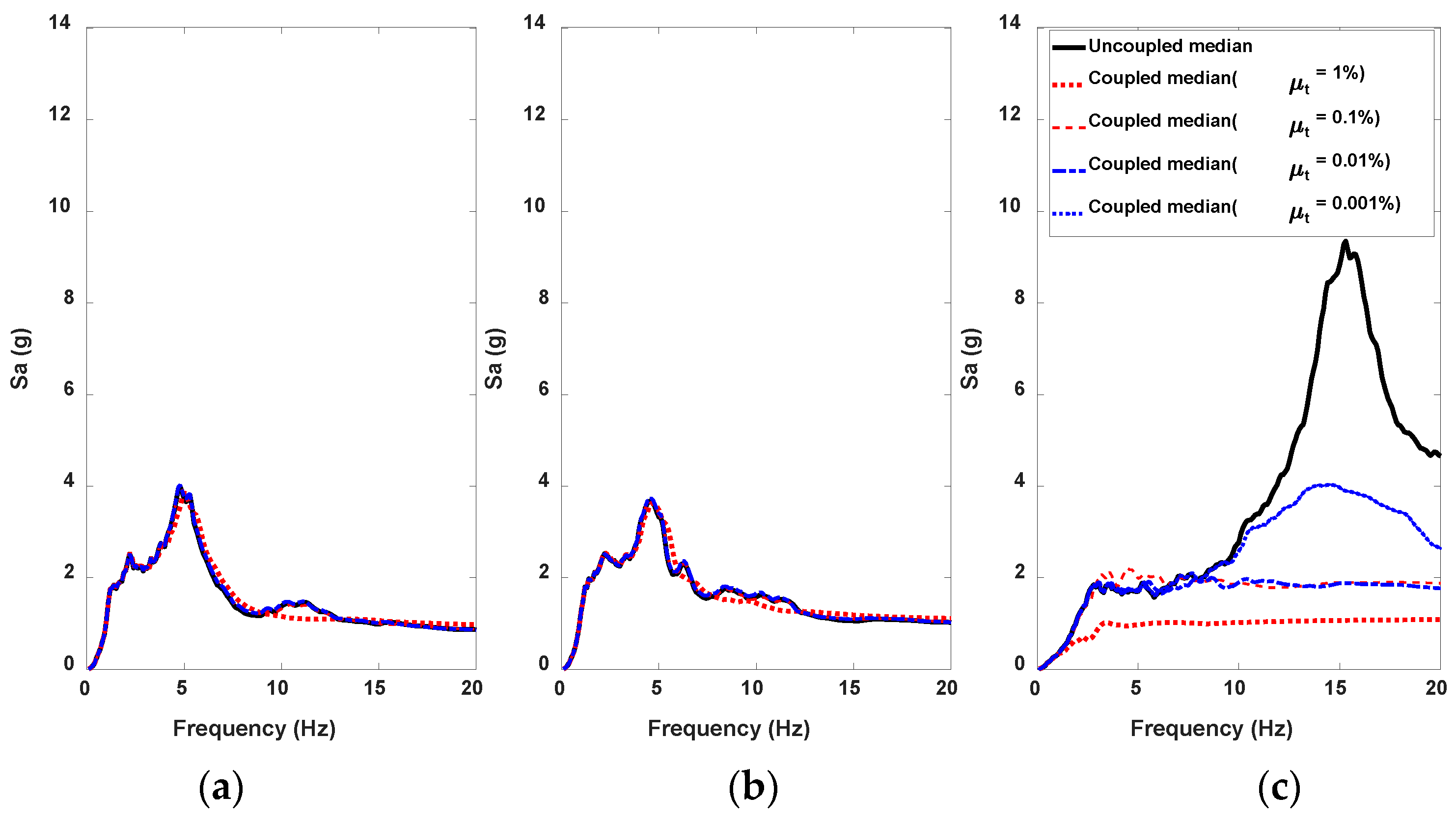
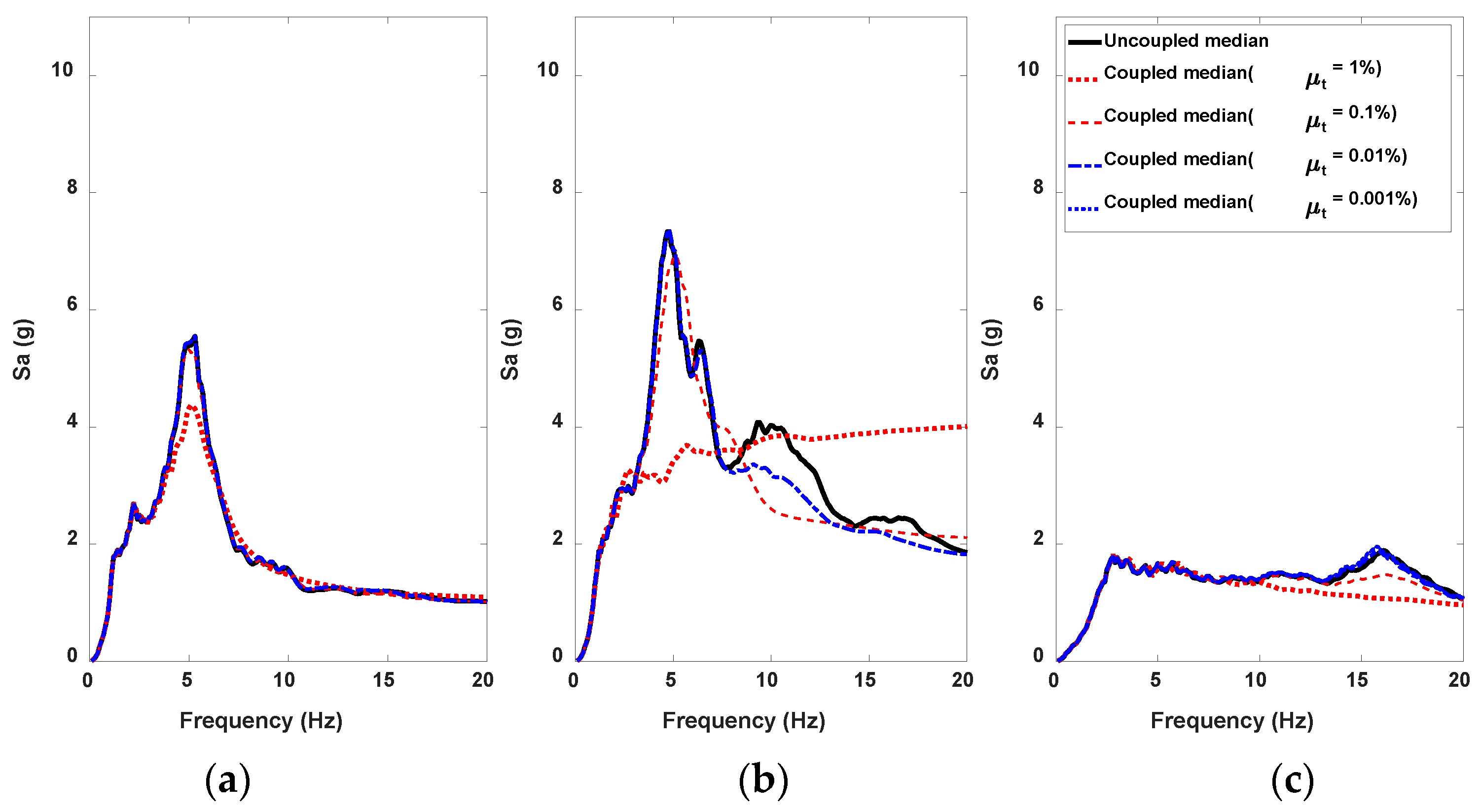
The decoupled and coupled mean ISRS at each of the four equipment locations are compared in
Figure 12,
Figure 13,
Figure 14 and
Figure 15, in which the equipment mass is 1%, 0.1%, and 0.01% of the total building mass, and equipment damping is 3%. The ISRS in the H1 and H2 directions at equipment locations 1 and 2 represent in-plane vibration, and as the mass ratio increases, the coupled ISRS decreases below the decoupled ISRS owing to the equipment–structure interaction in the proximity of the dominant frequency. In contrast, the ISRS in the V direction at equipment location 1 represents the out-of-plane vibration, and the acceleration response of the coupled ISRS tends to increase more than that of the decoupled ISRS over frequencies higher than 4 Hz as the mass ratio increases. The V-direction coupled ISRS at equipment location 2, which also represents an out-of-plane vibration, is lower than the decoupled ISRS near the dominant frequency of 15 Hz, but the influence of the mass ratio is unclear. The V-direction coupled ISRS at equipment location 3 showed a significant decrease as the mass ratio increased around the dominant frequency. In the case of the H2-direction coupled ISRS at equipment location 4, representing out-of-plane vibration as well, the equipment–structure interaction effect is noticeable only for 1% mass ratio at a dominant frequency of 5 Hz, while 0.1 and 0.01% mass ratios are more effective at the dominant frequency of 10 Hz. The H1- and V-direction coupled ISRS, representing in-plane vibration, also shows that the equipment–structure interaction becomes more significant as the mass ratio increases.
Figure 16 shows mode shapes corresponding to the dominant frequencies in the V-direction decoupled ISRS for equipment locations 1 to 3. As illustrated in
Figure 16a, the dominant mode shape for vertical vibration at equipment location 1 is not as prominent as other parts, and major vertical deformation occurs on the roof and other slabs. In the case of equipment location 2, the local vertical deformation at the location is not prominent compared to other parts too, and the vertical deformation appears to be dispersed in most slabs.
Table 4 summarizes the modal mass ratio, defined as the ratio of the equipment mass to the modal mass for the dominant frequency in the decoupled ISRS. Three equipment masses corresponding to 1, 0.1, and 0.01% of the total building mass were considered, and these values are denoted by the total mass ratio below: The modal mass ratio of the equipment is expressed by the following equation [
5]:
where
and
is the equipment mass;
is the value of the i-th mode eigenvector normalized to the mass matrix of the primary structure. It is observed that the modal mass ratio is significantly higher than the total mass ratio for 14.4, and 15.3 Hz, both of which are related to out-of-plane vibration. In the case of vertical vibration, the modal mass of 15.3 Hz vibration mode, of which the deformation is localized to equipment location 3 as shown in
Figure 16c, has the smallest value, and the corresponding mass ratio is the highest. On the other hand, the 16.4 Hz mode contains deformations at dispersed locations, as shown in
Figure 16a, such that the modal mass is relatively large and the corresponding mass ratios are relatively smaller than those for the 15.3 Hz mode. Overall, it can be noted that the effect of the equipment–structure interaction may be significant for local out-of-plane vibrations.

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}