Preliminary Examination of Emergent Threat and Risk Landscapes in Intelligent Harvesting Robots



Abstract
:1. Introduction
- an overview of the key components of intelligent harvest architecture and an in-depth analysis of safety and security challenges;
- presentation of potential adversarial scenarios as use cases that link between system vulnerabilities, AI-specific vulnerabilities and hardware challenges in intelligent harvesting robots;
- an assessment of the potential impact of the identified use cases from an operational and financial perspective.
2. Related Work
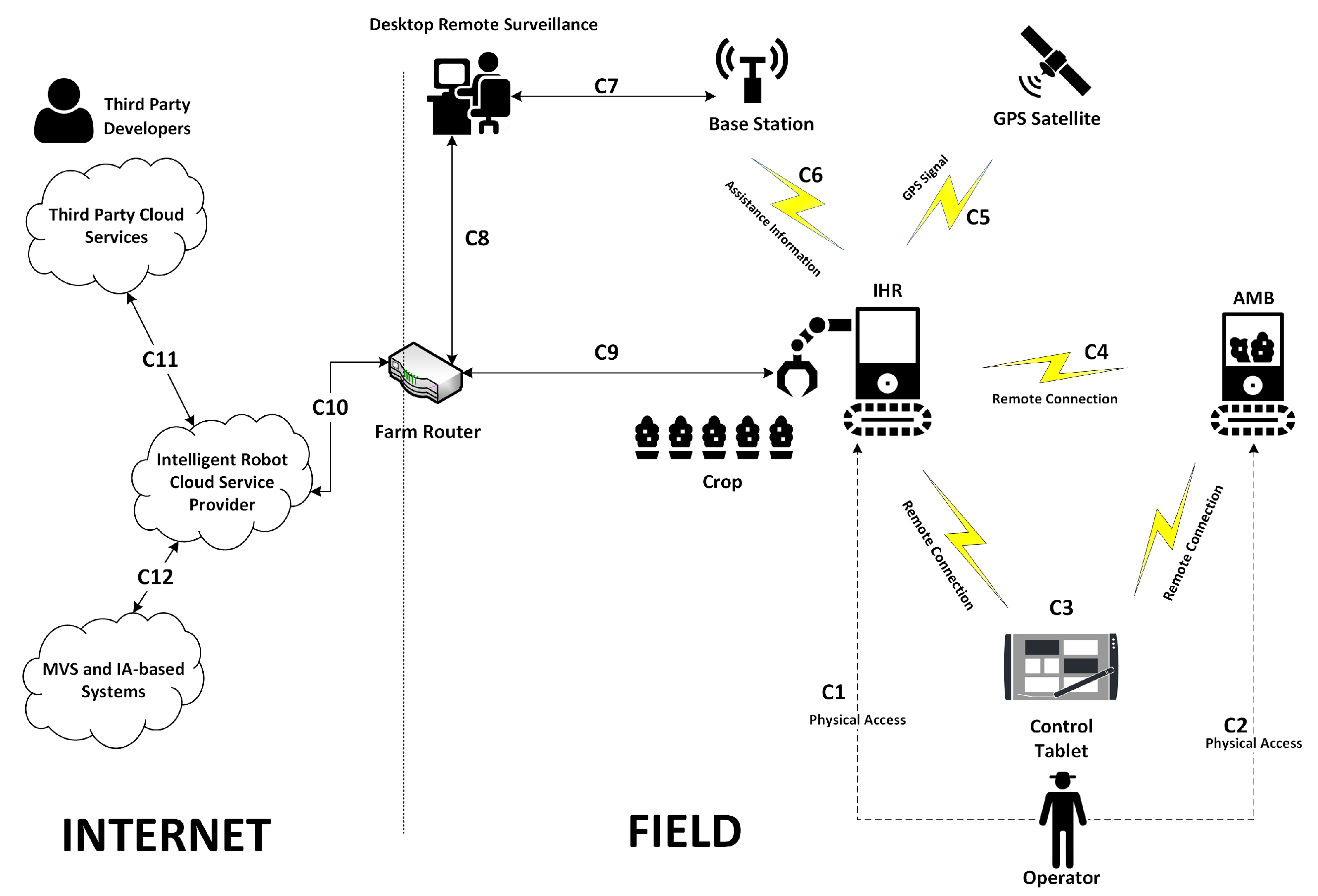
3. Intelligent Harvesting Machines
- Crop: A trivial component, which might include apple, litchi, citrus, grape, tomatoes, etc. They vary significantly in shape, size, colour texture and other physical, chemical and nutritional properties. This information is used by the Machine Vision System in the Intelligent Harvesting Robot in order to identify and locate the crop in complex situations.
- Intelligent Harvesting Robot (IHR): The robot is designed to pick fruits/vegetables automatically under certain environmental conditions. It uses a Machine Vision System to accomplish the task of picking the crop under the guidance of visual information. A typical harvesting operation is linked to two sub-tasks:
- Automatic Crop Recognition: Also referred to as the Machine Visions System, it means identifying and locating the crop in a natural complex scene.
- Eye–Hand Coordination: It focuses on the interaction between the robot visual perception of the work-space and its actuators.
- Autonomous Mobile Basket (AMB): A basket that provides storage to carry the harvested crop. In some cases, the basket is attached to the IHR. In other cases, there is a separate autonomous truck (full of baskets) which follows the robot and supplies empty baskets. Wireless communication is used in both cases.
- On-Site remote surveillance: In order to manage and improve the quality of the harvest operation, the farmer can tele-operate both the farming robot and the basket by sending commands through a client application installed on a intelligent device (tablet, smartphone, etc). An example of such commands could be to set the robot to avoid an obstacle or to send the mobile basket to the warehouse to store the harvested crops.
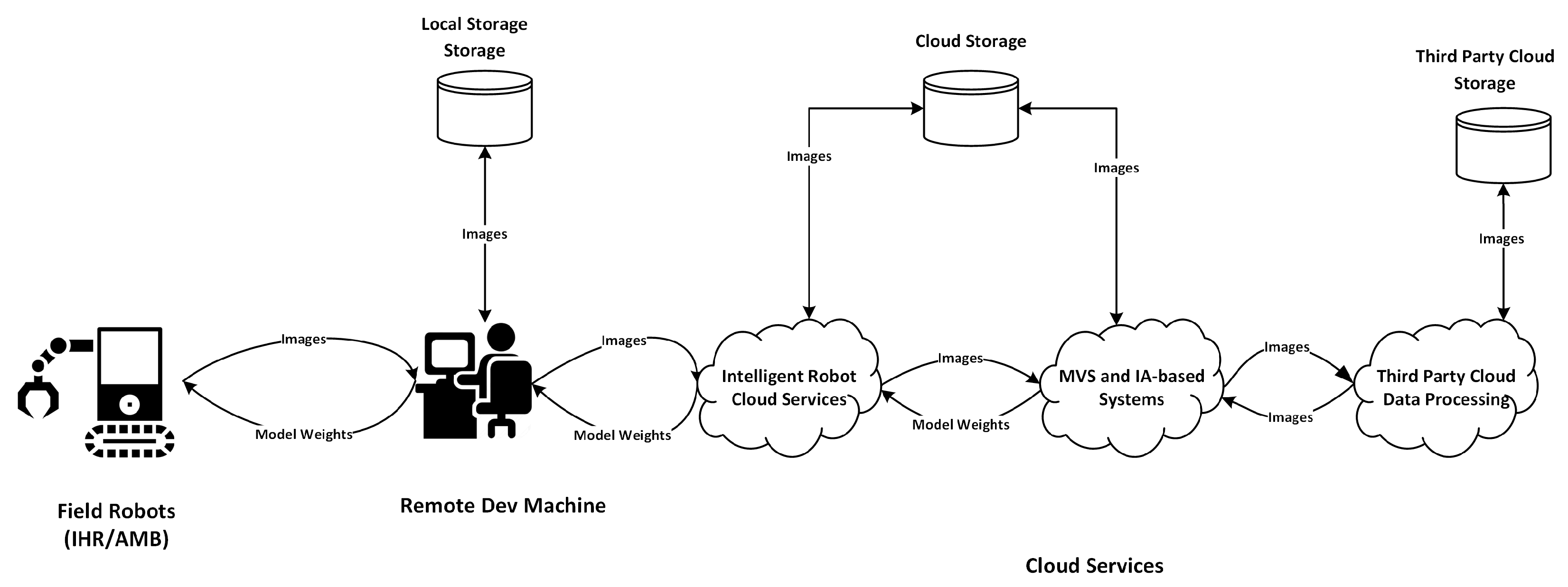
- Intelligent robot cloud service provider: The harvesting robot uses cloud services where most of the AI modules and intelligent features reside for further analysis to improve the tasks it performs.
- Base station: A GPS receiver that collects GPS measurements of the field. It consists of an antenna, a GPS receiver, and a device (often a personal computer) to which the GPS data is logged. Note that the robot also has a GPS module that collects GPS coordinates from the satellite in order to control its movement, but the difference is that a base station provides reference data that can be used to increase the accuracy (to within a few centimeters or less) of GPS data collected in the field.
4. Security and Safety Issues
4.1. Hardware Security Issues
4.1.1. Unprotected External/Internal Communication Ports
4.1.2. Untrusted Third Party Hardware
4.2. Network Security Issues
- Attacks targeting communication between IHR/AMB and the Control Tablet: The most critical threat is hijacking the entire communication between the robots and the control table which enables the attacker to connect to the unprotected network and starts eavesdropping information. After sufficient reconnaissance, an attacker then inject new, malicious packets into the network, in order to impact the harvesting operation. The authors in [10] investigated the impact of exploiting wireless vulnerabilities on the actions of tele-operated surgical robots. The study showed that the hijacking, disruption and interception of data on the wireless communication channel can have serious consequences on the robot and the safety of patients and surgeons. For the IHR, this could cause a significant degradation in performance or even unavailability of the system.
- Attacks targeting communication between IHR and the AMB: The Autonomous Mobile Basket constantly or periodically checks the storage state of the portable basket integrated into the Intelligent Harvesting Robot. This also requires a short range communication between both robots. Attackers can disrupt the communication channel by sending special wireless deauthentication packets to both robots (or one of them) to temporarily or even permanently disable them from being able to connect back to the storage system targeting the availability of systems and data. Attackers can also target the confidentiality of data by simply analysing the traffic between both robots. This could be conducted by either passively monitoring the transmitted robotic traffic over encrypted and un-encrypted open communication channels. The aim is to extract sensitive data about the robotic system. Another approach is to actively intercept storage related data and altering it by injecting false data, which deviates the robots from performing their intended activity in an accurate manner, or leave them prone to response delays.
- Attacks targeting communication between IHR/AMB and the Base Station: This set of attack vectors target the localisation and mobility systems of both robots by launching jamming and spoofing attacks. An adversary can jam the wireless sensor and communications producing radio interference to disrupt wireless networks so that the sensors cannot receive GPS related data. Additionally, an adversary can also spoof communications by emitting false signals (e.g., GNSS-like signals, with the intention of producing false location-based information in the victim receiver). Malicious signals can also be exploited to negatively affect the communication channels of wireless sensors. For example, the goal in the latter case may be to deplete battery life or even block the communication channel so that the sensors cannot return their readings. Both examples have a direct impact on availability. This will cause problems to the Automatic Crop Recognition which depend on the target sensor and therefore the associated functionality of IHR/AMB [30].
4.3. Cloud Security Issues
- Unauthorised cloud data access: Cloud services usually offer multiple ways of accessing data (e.g., app- or web-enabled access) which widens the attack service. An attacker can exploit an undiscovered vulnerability and gain access to cloud robot data and then they can read, modify, or even delete any robotic data.
- Third party access: Another important issue is how the developers who create the cloud services connected to IHR/AMB, and who have direct access to any communication channel of the intelligent harvesting machine architecture, protect users from external parties who do not have access to any of these communication channels. In this context, some companies use third-party cloud services that offer additional data processing and analysis to improve the performance of robot services during the harvesting operation. This of course raises another question about how data are shared by those involved in intelligent harvesting machines and what kind of controls and security mechanisms are implemented by third parties to protect shared data.
4.4. System/Software Security Issues
4.5. AI Security Issues
- Adversarial AI: The aim is to target the inference phase of the ML and deep learning systems in the machine vision system by including perturbations to the crop images that are undetectable to the human eye but maximizes the model’s prediction error, forcing it to make wrong predictions.
- Data Poisoning: This involves injecting erroneous/falsified/bad cropping images into the training/validation set by gaining legitimate or illegitimate access by exploiting poor authentication/authorization mechanisms. The purpose is to affect the operation and performance of the machine vision system.
- Input Tampering: By deliberately or unintentionally manipulating crop images in several stages stage of the AI life cycle. Actors such as AI/ML engineers can manipulate data during the storage procedure and using some processes such as feature selection or image labelling. This could interfere with model inference and introduce bias into training data and affect the performance of the machine vision system.
- Model Extraction: These attacks aim to duplicate a machine learning model through query access to a target model. The typical setup for a model extraction attack is an API, such as the ones provided by MLaaS platforms [32]. In the literature, protecting the confidentiality of DLs can be conducted by:
- −
- Change the API to limit the number of user queries and also to ignore incomplete queries,
- −
- Introducing random and controllable noise to the model to maximise the loss of a stolen model while preserving its prediction accuracy. This deceptive perturbation can degrade or slow down the model stealing process.
4.6. Security Gap in Cyber-Physical Systems
5. Impact of the Security/Safety Issues
5.1. Use Cases
- placement of objects;
- deformation of the crop;
- changing external environmental factors (projection of light on the crop).
- The attacker starts by analysing the capabilities of the targeted versions of the cameras and the MVS.
- The adversary designs an adversarial attack capable of altering the outputs. This is a trial-and-error phase it requires many physical experiments and disturbance models to increase the success rate of the attack.
- The attacker launches the attack by performing the alteration on the crop to cause misclassification by IHR.
- When IHR arrives at the targeted location, it will erroneously classify it into the attacker’s chosen class (e.g., interpret a ripe asparagus as unready) and react accordingly (e.g., ignores instead of harvesting).
- Security vulnerabilities in sensors and GPS signals are identified.
- Taking advantage of the vulnerable sensors, the adversary remotely injects unwanted signals into the communication channel or disables sending/receiving messages.
- The attacker will use the compromised sensor to block or disrupt the dara transmission, which will affect the functionality of the decision algorithms that IHR uses to perform its normal operation. If the GPS is spoofed, the intelligent harvesting robot will receive erroneous data which will confused its Machine Vision System.
- Attacker starting by analysing the robot hardware design to identify internal hardware that is accessible from outside such as sensors, actuators, computation units, user interfaces, etc.
- Attacker disable or remove accessible components and plug malicious new ones
- Attacker implement back-doors to gain unauthorized access to the robots
5.2. Threat Impact Assessment
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AMB | Autonomous Mobile Basket |
| API | Application Programming Interface |
| GPS | Global Positioning System |
| AI | Artificial Intelligence |
| IoT | Internet of Things |
| ML | Machine Learning |
| MVS | Machine Vision System |
| IHR | intelligent harvesting Robot |
References
- Etspeaksfromhome. Teksta Robotic Puppy Review. Available online: https://etspeaksfromhome.co.uk/2014/10/teksta-robotic-puppy-dalmatian-review.html (accessed on 1 November 2022).
- Right, R.D. Assembly Line Robots. Available online: https://robotsdoneright.com/Articles/assembly-line-robots.html (accessed on 30 October 2022).
- QinetiQ. MAARS Weaponized Robot. Available online: https://www.qinetiq.com/en-us/capabilities/robotics-and-autonomy/maars-weaponized-robot (accessed on 29 October 2022).
- IFR—International Federation of Robotics. World Robotics 2020 Report. Int. Fed. Robot. 2020, 49, 16–18. [Google Scholar]
- Fahmida Islam, S.; Uddin, M.S.; Bansal, J.C. Harvesting Robots for Smart Agriculture. In Computer Vision and Machine Learning in Agriculture; Uddin, M.S., Bansal, J.C., Eds.; Springer: Singapore, 2022; Volume 2, pp. 1–13. [Google Scholar] [CrossRef]
- Lovett, I. Robots Take Over Italy’s Vineyards as Wineries Struggle with COVID-19 Worker Shortages. The Wall Street Journal, 3 October 2022. [Google Scholar]
- Yaacoub, J.P.A.; Noura, H.N.; Salman, O.; Chehab, A. Robotics cyber security: Vulnerabilities, attacks, countermeasures, and recommendations. Int. J. Inf. Secur. 2021, 21, 115–158. [Google Scholar] [CrossRef] [PubMed]
- Vilches, V.M.; Kirschgens, L.A.; Calvo, A.B.; Cordero, A.H.; Pisón, R.I.; Vilches, D.M.; Rosas, A.M.; Mendia, G.O.; Juan, L.U.S.; Ugarte, I.Z.; et al. Introducing the Robot Security Framework (RSF), a standardized methodology to perform security assessments in robotics. arXiv 2018, arXiv:1806.04042. [Google Scholar]
- Colell, A. Hacker Report: Understanding Hacker Motivations, Development and Outlook. In Energiepolitik und Klimaschutz. Energy Policy and Climate Protection; Springer: Berlin/Heidelberg, Germany, 2021; pp. 257–282. [Google Scholar] [CrossRef]
- Bonaci, T.; Herron, J.; Yusuf, T.; Yan, J.; Kohno, T.; Chizeck, H.J. To Make a Robot Secure: An Experimental Analysis of Cyber Security Threats Against Teleoperated Surgical Robots. arXiv 2015, arXiv:1504.04339. [Google Scholar]
- Demestichas, K.; Peppes, N.; Alexakis, T. Survey on Security Threats in Agricultural IoT and Smart Farming. Sensors 2020, 20, 6458. [Google Scholar] [CrossRef] [PubMed]
- Morante, S.; Victores, J.G.; Balaguer, C. Cryptobotics: Why Robots Need Cyber Safety. Front. Robot. AI 2015, 2, 23. [Google Scholar] [CrossRef] [Green Version]
- Bhardwaj, A.; Avasthi, V.; Goundar, S. Cyber security attacks on robotic platforms. Netw. Secur. 2019, 2019, 13–19. [Google Scholar] [CrossRef]
- Alemzadeh, H.; Chen, D.; Li, X.; Kesavadas, T.; Kalbarczyk, Z.T.; Iyer, R.K. Targeted attacks on teleoperated surgical robots: Dynamic model-based detection and mitigation. In Proceedings of the 46th Annual IEEE/IFIP International Conference on Dependable Systems and Networks, DSN 2016, Toulouse, France, 28 June–1 July 2016; pp. 395–406. [Google Scholar] [CrossRef]
- Kazanzides, P. Safety Design for medical robots. In Proceedings of the 31st Annual International Conference of the IEEE Engineering in Medicine and Biology Society: Engineering the Future of Biomedicine, EMBC 2009, Minneapolis, MN, USA, 3–6 September 2009; pp. 7208–7211. [Google Scholar] [CrossRef]
- Vuong, T.; Filippoupolitis, A.; Loukas, G.; Gan, D. Physical indicators of cyber attacks against a rescue robot. In Proceedings of the 2014 IEEE International Conference on Pervasive Computing and Communication Workshops, PERCOM Workshops 2014, Budapest, Hungary, 24–28 March 2014; pp. 338–343. [Google Scholar] [CrossRef]
- Cerrudo, C. Hacking Robots Before Skynet 1. In Cybersecurity Insight; IOActive, Inc.: Seattle, WA, USA, 2017; pp. 1–17. [Google Scholar]
- Suarez-tangil, G. Smart Home Personal Assistants: A Security and Privacy Review. ACM Comput. Surv. 2019, 53, 1–36. [Google Scholar]
- Aldinhas Ferreira, M.I.; Fletcher, S.R. (Eds.) The 21st Century Industrial Robot: When Tools Become Collaborators; Springer: Cham, Switzerland, 2022; Volume 81, pp. 1–286. [Google Scholar]
- Pogliani, M.; Quarta, D.; Polino, M.; Vittone, M.; Maggi, F.; Zanero, S. Security of controlled manufacturing systems in the connected factory: The case of industrial robots. J. Comput. Virol. Hacking Tech. 2019, 15, 161–175. [Google Scholar] [CrossRef]
- Calicioglu, O.; Flammini, A.; Bracco, S.; Bellù, L.; Sims, R. The Future Challenges of Food and Agriculture: An Integrated Analysis of Trends and Solutions. Sustainability 2019, 11, 222. [Google Scholar] [CrossRef] [Green Version]
- Kafali, E.; Zafirouli, K.; Karageorgos, K.; Semertzidis, T.; Daras, P. 2. Cyber-physical Adversarial Attacks and Countermeasures for Deep Learning Vision Systems on Critical Infrastructures. In Cyber-Physical Threat Intelligence for Critical Infrastructures Security: Securing Critical Infrastructures in Air Transport, Water, Gas, Healthcare, Finance and Industry; Now Publishers: Boston, MA, USA; Delft, The Netherlands, 2021; pp. 22–50. [Google Scholar] [CrossRef]
- Hasan, M.M.; Islam, M.U.; Sadeq, M.J. Towards technological adaptation of advanced farming through AI, IoT, and Robotics: A Comprehensive overview. arXiv 2022. [Google Scholar] [CrossRef]
- Kootstra, G.; Wang, X.; Blok, P.M.; Hemming, J.; van Henten, E. Selective Harvesting Robotics: Current Research, Trends, and Future Directions. Curr. Robot. Rep. 2021, 2, 95–104. [Google Scholar] [CrossRef]
- Li, J.; Tang, Y.; Zou, X.; Lin, G.; Wang, H. Detection of Fruit-Bearing Branches and Localization of Litchi Clusters for Vision-Based Harvesting Robots. IEEE Access 2020, 8, 117746–117758. [Google Scholar] [CrossRef]
- Zhou, H.; Wang, X.; Au, W.; Kang, H.; Chen, C. Intelligent robots for fruit harvesting: Recent developments and future challenges. Precis. Agric. 2022, 23, 1856–1907. [Google Scholar] [CrossRef]
- Tang, Y.; Chen, M.; Wang, C.; Luo, L.; Li, J.; Lian, G.; Zou, X. Recognition and Localization Methods for Vision-Based Fruit Picking Robots: A Review. Front. Plant Sci. 2020, 11, 510. [Google Scholar] [CrossRef] [PubMed]
- McClean, J.; Stull, C.; Farrar, C.; Mascare nas, D. A preliminary cyber-physical security assessment of the Robot Operating System (ROS). Unmanned Syst. Technol. XV 2013, 8741, 874110. [Google Scholar] [CrossRef]
- Singh, T. Top 5 Usb Hacks that Pwn You. Available online: https://geeknizer.com/top-usb-hacks-pwn/ (accessed on 15 November 2022).
- European Union Agency for Network and Information Security. Cybersecurity Challenges in the Uptake of Artificial Intelligence in Autonomous Driving; ENISA: Athens, Greece, 2021. [Google Scholar]
- Malatras, A.; Dede, G. Artificial Intelligence Cybersecurity Challenges—ENISA; ENISA: Athens, Greece, 2020. [Google Scholar]
- Florian, T.; Fan, Z.; Ari, J.; Michael, K.R.; Thomas, R. Stealing Machine Learning Models via Prediction APIs; USENIX Association: Berkeley, CA, USA, 2016. [Google Scholar]
- James, T.; Kelli, K.T. Open Threat Taxonomy, Version 1.1; Technical Report. Available online: https://www.auditscripts.com/resources/open_threat_taxonomy_v1.1a.pdf (accessed on 12 October 2022).
- ISO/IEC 27005; Information Technology—Security Techniques—Information Security Risk Management. Technical Report; Joint Technical Committee: Geneva, Switzerland, 2011.
- NIST. NIST Special Publication 800-30: Guide for Conducting Risk Assessement; Technical Report; NIST: Gaithersburg, MD, USA, 2012. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Reference | Description |
|---|---|
| [12] | Highlights bot security threats, including communication and software. The authors claimed that there was not enough effort to prepare cyber-safe robots. |
| [13] | The authors performed a security vulnerability analysis of programmable robotic systems written in java and python and reported the main security findings. The work indicates that traditional access control systems cannot detect recent vulnerabilities or defend against the latest evolving cybersecurity and physical attacks on the availability, integrity and confidentiality of robotic systems. |
| [14] | The proposed work demonstrated cyber-physical attacks on the control system of surgical robots in the event when the attacker is able to install a malware to strategically inject faults into the control system at critical junctures during surgery. The results suggest that successful attacks can cause sudden jumps and unpredicted behaviours on surgical robots. |
| [15] | The paper proposes a safety design approach for computer-assisted surgery systems after performing a risk assessment to identify potential hazards. At the end, the authors proposed safety strategies to follow to prevent injury even in the event of component failures of computer-assisted surgery systems. |
| [16] | This paper investigates how a cyber-attack on a rescue robot can adversely affect its operation and impair an emergency response operation. They launched several attacks and analysed the behaviour of the rescue robot. Results suggest that using physical indicators can contribute to early detection and decision making. |
| [17] | Authors analysed the cyber security problems in modern robots. To do this, they applied a risk assessment and threat modelling methodology on robots from multiple vendors. Results state that there are several security and privacy issues that have consequences in many areas of applications such as home, military, health and industry. |
| [18] | The authors proposed a comprehensive systemic security assessment of voice-based assistant in used robots used in homes. The work considers several factors in the design of the technology that widens the attack surface. The authors also discussed some countermeasure to the identified threats and presented some open questions that still further research. |
| [19] | This chapter summarises approaches to the coordinated assurance of safety and security of collaborative industrial robots. The work specifically focuses on human-robot interaction and collaboration in manufacturing from a security perspective. The use-case focus a robot named COBOT in which the performed threat modelling and risk assessment to identify and prioritise threats. The identified challenges are not limited only to technical factors, they only considered socio-technical factors. |
| [20] | Focusing on industrial robots as use case, this work provides a holistic view of the security issues that arise in designing and securely deploying controlled manufacturing systems. The work focused on four threat scenarios that helped the authors analyse the attack of surface of controlled systems and the security risks that arise from their interconnection, operation and expansion with accompanied IIoT devices. |
| [21] | The work details the factors that have impact on food shortage and agriculture. The authors focus on more as climate change is it has the highest impact when compared to others. |
| [22] | Focusing on machine vision systems, this work focuses on presenting several types of adversarial threats against deep learning-based computer and presents several approaches to protect against such threats. The work studies a specific model and looks at threats against several use cases such as: human action recognition, crown counting and person reidentification. |
| [23] | Focusing on machine vision systems, this work focuses on presenting several types of adversarial threats against deep learning-based computer, specifically a framework called INFRASTRESS. The authors also presented several defending mechanisms. |
| Asset/Resource | CIA Triad | |||
|---|---|---|---|---|
| Type | Description | Confidentiality | Integrity | Availability |
| Sensors and camera data | Any data produced by the sensors should be accessed and available to the authorised actors. | ✓ | ✓ | |
| IHR Data Stores | IHR persistent data (logs, software, etc.) must be accessible to only authorised actors. | ✓ | ✓ | |
| Physical safety | IHR system must not harm its users or environment | ✓ | ||
| IHR Behaviour | The robotic system must not allow attackers to disrupt its tasks | ✓ | ||
| Compute Capabilities | Robot embedded and distributed (e.g., cloud services) compute resources. The unavailability the compute resources of IHR and the MVS will prevent the robot from operating correctly | ✓ | ||
| IHR | The IHR must not damage itself and must respond to commands within a reasonable time. | ✓ | ✓ | |
| Use Case | Impact | Impacted Asset | |||||
|---|---|---|---|---|---|---|---|
| Sensors/Camera Data | IHR Data Stores | Physical Safety | IHR Behaviour | Compute Capabilities | IHR | ||
| Use Case 1 | Missclassification of images which might results to ruining, crushing, or ignoring crops | ✓ | ✓ | ✓ | ✓ | ✓ | |
| Unstable navigation function in the drive unit if perturbations were introduced to the path of IHR | ✓ | ✓ | ✓ | ✓ | |||
| Integrity of data is compromised in case of poisoning images with adversarial data sets | ✓ | ✓ | ✓ | ✓ | |||
| Use Case 2 | Battery life is depleted due unstable situational awareness and the robot’s navigation function | ✓ | ✓ | ||||
| Communication channels are blocked due jamming and denial of service attacks | ✓ | ✓ | ✓ | ✓ | |||
| Use Case 3 | IHR and users are under constant surveillance, monitoring, and tracking due to an installed backdoor | ✓ | ✓ | ||||
| Malicious and dangerous behaviour of IHR: the intelligent harvesting drives through farmers or throws itself into into a hedge or a ditch because of a remote access attack | ✓ | ✓ | ✓ | ||||
| Impact | Type | Example |
|---|---|---|
| Business | Direct | The financial replacement value of lost (part of) asset. |
| The cost of acquisition, configuration and installation of the new asset or backup. | ||
| The cost of suspended operations due to the incident until the service provided by the asset(s) is restored. | ||
| Impact results in an information security breach. | ||
| Indirect | Opportunity cost (financial resources needed to replace or repair an asset would have been used elsewhere); | |
| The cost of interrupted operations. | ||
| Potential misuse of information obtained through a security breach. | ||
| Violation of statutory or regulatory obligations. | ||
| Violation of ethical codes of conduct. | ||
| Long term | Loss of reputation (Trustworthiness). | |
| Loss of public confidence (Trust). | ||
| Tarnished image of PSA and of the Government. | ||
| Potential legal action if privacy legislation is breached. | ||
| Privacy Loss if it is possible to correlate identities across processes or make inferences from aggregated data sets | ||
| Operational | Field Robot | Significant degradation in performance of the machine vision system and AI-based modules (e.g., crop detection, path planning, etc.) |
| Unexpected behaviour of IHR/AMB | ||
| Delays in decision making and unavailability of data and services | ||
| Exposure of data-sets and sensitive information | ||
| Loss of data/code of the harvesting robot. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moukafih, N.; Epiphaniou, G.; Maple, C.; Chavasse, C.; Moran, J. Preliminary Examination of Emergent Threat and Risk Landscapes in Intelligent Harvesting Robots. Appl. Sci. 2022, 12, 12931. https://doi.org/10.3390/app122412931
Moukafih N, Epiphaniou G, Maple C, Chavasse C, Moran J. Preliminary Examination of Emergent Threat and Risk Landscapes in Intelligent Harvesting Robots. Applied Sciences. 2022; 12(24):12931. https://doi.org/10.3390/app122412931
Chicago/Turabian StyleMoukafih, Nabil, Gregory Epiphaniou, Carsten Maple, Chris Chavasse, and John Moran. 2022. "Preliminary Examination of Emergent Threat and Risk Landscapes in Intelligent Harvesting Robots" Applied Sciences 12, no. 24: 12931. https://doi.org/10.3390/app122412931