
A Combined Machine Learning and Model Updating Method for Autonomous Monitoring of Bolted Connections in Steel Frame Structures Using Vibration Data

Abstract
:1. Introduction
- (i)
- The development of a combined ML and FE model updating technique for the health monitoring of joints of planer frame structures;
- (ii)
- The accurate localization and quantification of joint damage with a lesser number of data sets compared to the data sets required if only either the ML-based technique or model updating technique is employed for the same purpose;
- (iii)
- The effectiveness of standard deviation, skewness, kurtosis, mean absolute deviation, and entropy-based features for the localization of loosening of bolts in planer frame structures.
2. Methodology
2.1. Machine Learning Based Localization
2.1.1. Feature Extraction
2.1.2. Classification Using SVM
2.2. FE Model Updating Using CSO
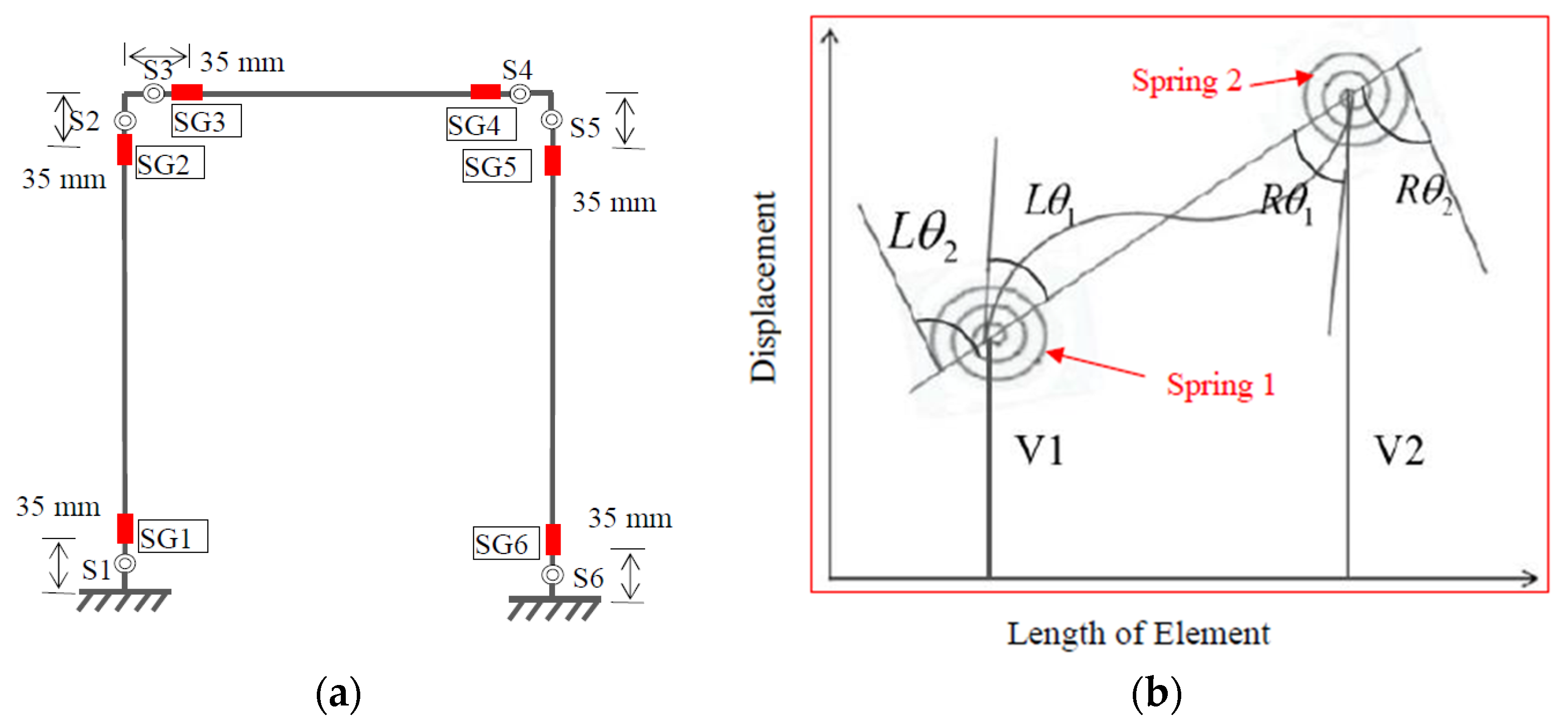
2.2.1. Formulation of the Elemental Mass and Stiffness Matrices
2.2.2. Objective Function Formulation and Parameter Selection
2.2.3. Cat Swarm Optimization (CSO)
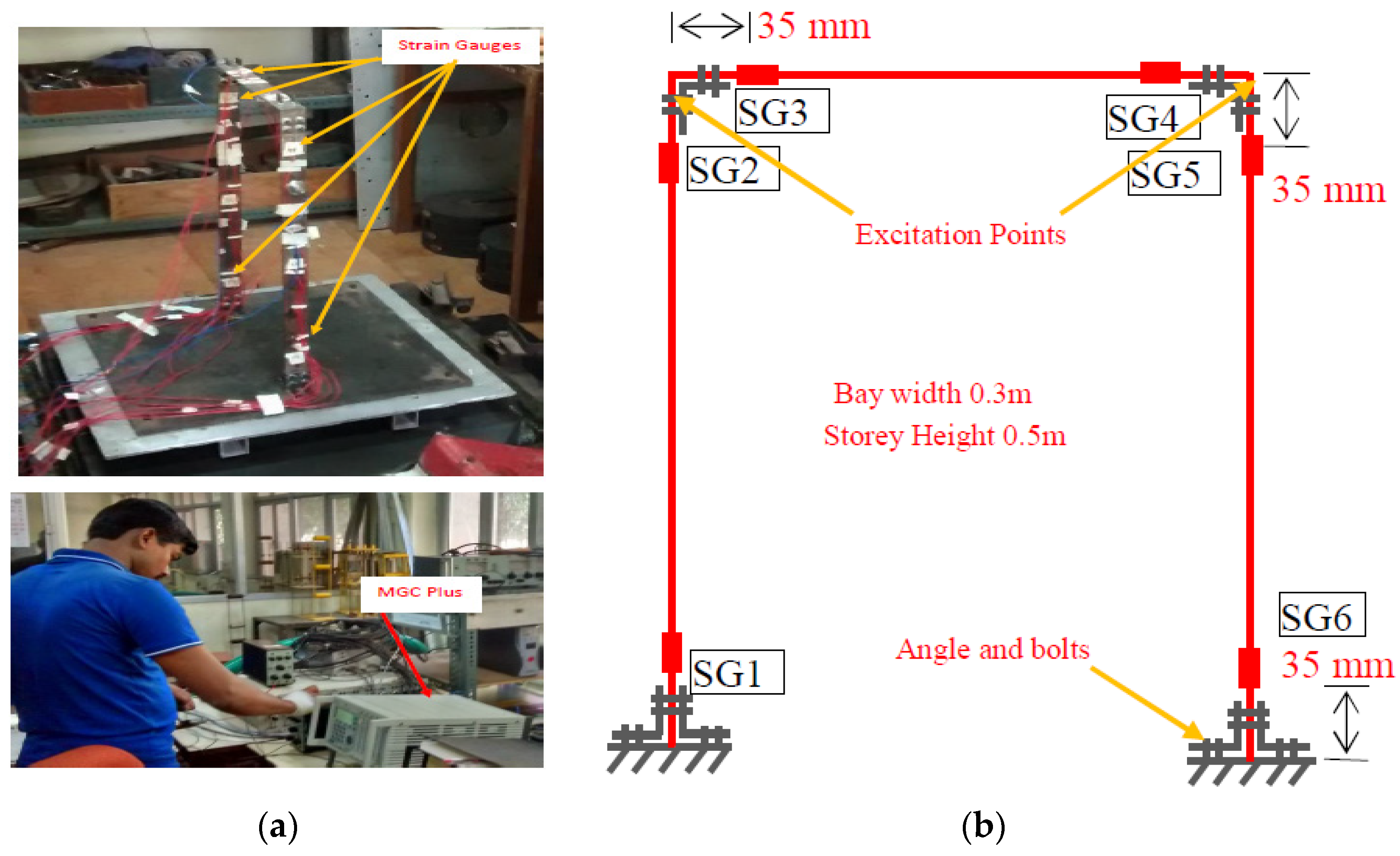
3. Experimental Study
4. Pseudo-Experimental Investigation
5. Pseudo-Experimental Results
6. Conclusions
- The hybrid ML and MU method considered damaged data collected from the sensors surrounding the damage for two loosened cases only and the undamaged data collected from all the sensors for healthy/un-loosened conditions along with data obtained from the sensors are far from the loosened locations for the same two loosened conditions.
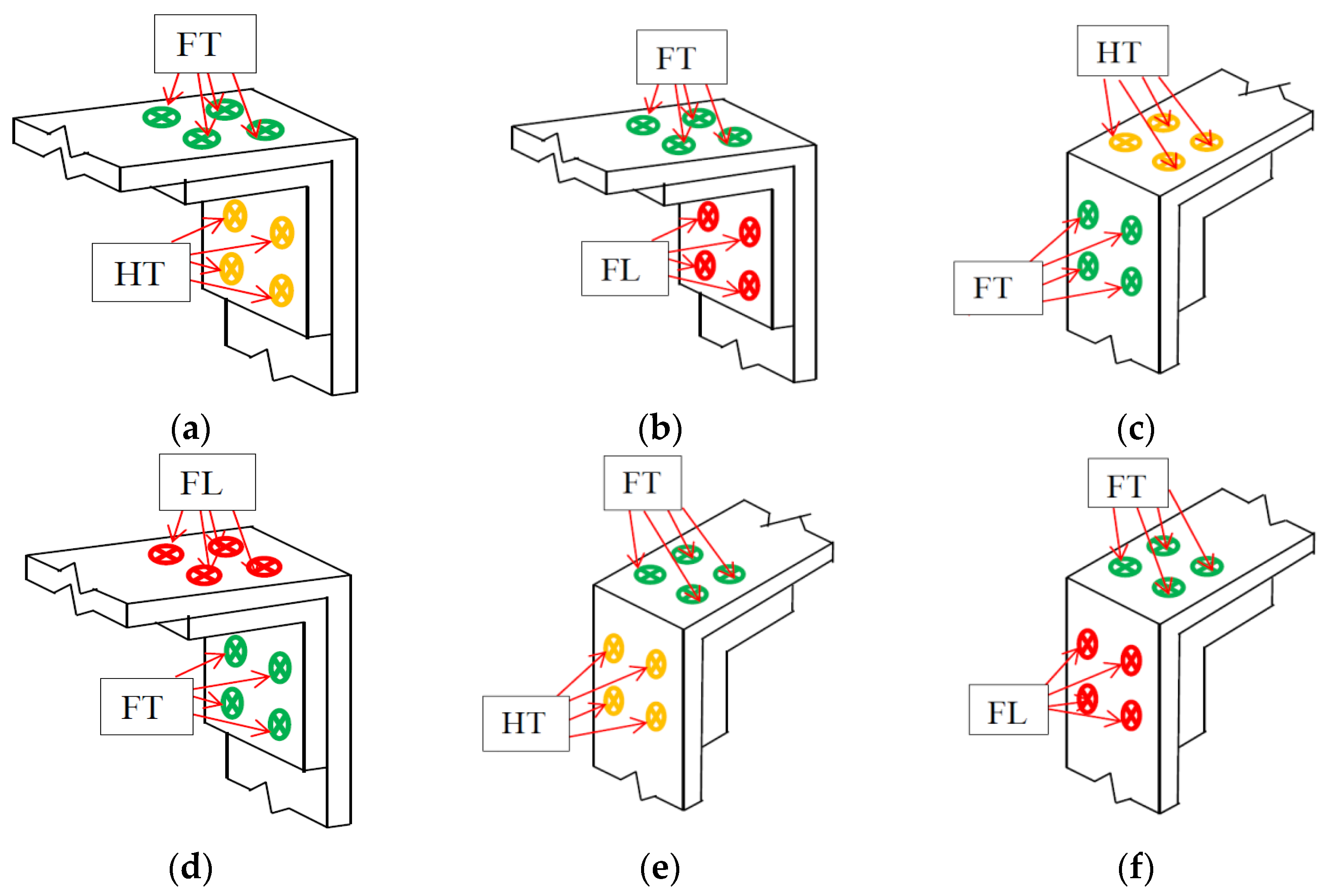
- The testing was carried out with the data for different locations of loosening of bolts and different levels of damage to produce uncorrelated data. The confusion matrices thus identify the damaged joints.
- The average training and validation accuracy for the experimental and numerical models were found to be 92.5%, 88.75% and 91.50%, 85.40%, respectively, and the testing results show 79.00% and 77.00% accuracy, respectively.
- The FE model updating technique successfully detects the actual damage (loosening of bolts) location by calculating the fixity factors.
- The method needs only strain gauge data for finding out the differentiable features in order to monitor the connections of planer steel frame structures, hence, it reduces the involvement of skilled labor.
Author Contributions
Funding
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Blachowski, B.; Gutkowski, W. Effect of damaged circular flange-bolted connections on behaviour of tall towers, modelled by multilevel substructuring. Eng. Struct. 2016, 111, 93–103. [Google Scholar] [CrossRef]
- Wang, T.; Song, G.; Wang, Z.; Li, Y. Proof-of-concept study of monitoring bolt connection status using a piezoelectric based active sensing method. Smart Mater. Struct. 2013, 22, 087001. [Google Scholar] [CrossRef]
- Cha, Y.J.; You, K.; Choi, W. Vision-based detection of loosened bolts using the Hough transform and support vector machines. Autom. Constr. 2016, 71, 181–188. [Google Scholar] [CrossRef]
- Kong, X.; Li, J. Image registration-based bolt loosening detection of steel joints. Sensors 2018, 18, 1000. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shao, J.; Wang, T.; Yin, H.; Yang, D.; Li, Y. Bolt looseness detection based on piezoelectric impedance frequency shift. Appl. Sci. 2016, 6, 298. [Google Scholar] [CrossRef] [Green Version]
- Brownjohn, J.M.; Xia, P.Q.; Hao, H.; Xia, Y. Civil structure condition assessment by FE model updating: Methodology and case studies. Finite Elem. Anal. Des. 2001, 37, 761–775. [Google Scholar] [CrossRef]
- Jaishi, B.; Ren, W.X. Finite element model updating based on eigen value and strain energy residuals using multi-objective optimisation technique. Mech. Syst. Signal Process. 2007, 21, 2295–2317. [Google Scholar] [CrossRef]
- Ren, W.X.; Chen, H.B. Finite element model updating in structural dynamics by using the response surface method. Eng. Struct. 2010, 32, 2455–2465. [Google Scholar] [CrossRef]
- Friswell, M.; Mottershead, J.E. Finite Element Model Updating in Structural Dynamics; Springer Science & Business Media: Dordrecht, The Netherlands, 2013; Volume 38. [Google Scholar]
- Entezami, A.; Shariatmadar, H. Structural health monitoring by a new hybrid feature extraction and dynamic time warping methods under ambient vibration and non-stationary signals. Measurement 2019, 134, 548–568. [Google Scholar] [CrossRef]
- Friswell, M.I.; Penny, J.E.T.; Garvey, S.D. A combined genetic and eigensensitivity algorithm for the location of damage in structures. Comput. Struct. 1998, 69, 547–556. [Google Scholar] [CrossRef]
- Meruane, V.; Heylen, W. An hybrid real genetic algorithm to detect structural damage using modal properties. Mech. Syst. Signal Process. 2011, 25, 1559–1573. [Google Scholar] [CrossRef] [Green Version]
- Nouri Shirazi, M.R.; Mollamahmoudi, H.; Seyedpoor, S.M. Structural damage identification using an adaptive multi-stage optimization method based on a modified particle swarm algorithm. J. Optim. Theory Appl. 2014, 160, 1009–1019. [Google Scholar] [CrossRef]
- Perera, R.; Fang, S.E.; Huerta, C. Structural crack detection without updated baseline model by single and multiobjective optimization. Mech. Syst. Signal Process. 2009, 23, 752–768. [Google Scholar] [CrossRef]
- Park, G.; Hong, K.-N.; Yoon, H. Vision-Based Structural FE Model Updating Using Genetic Algorithm. Appl. Sci. 2021, 11, 1622. [Google Scholar] [CrossRef]
- Teughels, A.; Maeck, J.; De Roeck, G. Damage assessment by FE model updating using damage functions. Comput. Struct. 2002, 80, 1869–1879. [Google Scholar] [CrossRef]
- Perera, R.; Ruiz, A. A multistage FE updating procedure for damage identification in large-scale structures based on multiobjective evolutionary optimization. Mech. Syst. Signal Process. 2008, 22, 970–991. [Google Scholar] [CrossRef] [Green Version]
- Pal, J.; Banerjee, S. A hybrid modal strain energy and particle swarm optimization for health monitoring of structures. J. Civ. Struct. Health Monit. 2015, 5, 353–363. [Google Scholar] [CrossRef]
- Wu, J.R.; Li, Q.S. Structural parameter identification and damage detection for a steel structure using a two-stage finite element model updating method. J. Constr. Steel Res. 2006, 62, 231–239. [Google Scholar] [CrossRef]
- He, W.Y.; Zhu, S. Progressive damage detection based on multi-scale wavelet finite element model: Numerical study. Comput. Struct. 2013, 125, 177–186. [Google Scholar] [CrossRef]
- Zhu, H.; Li, J.; Tian, W.; Weng, S.; Peng, Y.; Zhang, Z.; Chen, Z. An enhanced substructure-based response sensitivity method for finite element model updating of large-scale structures. Mech. Syst. Signal Process. 2021, 154, 107359. [Google Scholar] [CrossRef]
- Yuan, F.G.; Zargar, S.A.; Chen, Q.; Wang, S. Machine learning for structural health monitoring: Challenges and opportunities. Sens. Smart Struct. Technol. Civ. Mech. Aerosp. Syst. 2020, 11379, 1137903. [Google Scholar]
- Sikdar, S.; Pal, J. Bag of visual words-based machine learning framework for disbond characterisation in composite sandwich structures using guided waves. Smart Mater. Struct. 2021, 30, 075016. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, Y. Image-driven structural steel damage condition assessment method using deep learning algorithm. Measurement 2019, 133, 168–181. [Google Scholar] [CrossRef]
- Kundu, A.; Sikdar, S.; Eaton, M.; Navaratne, R. A Generic Framework for Application of Machine Learning in Acoustic Emission-Based Damage Identification. In Proceedings of the 13th International Conference on Damage Assessment of Structures, Porto, Portugal, 9–10 July 2019; Springer: Singapore, 2020; pp. 244–262. [Google Scholar] [CrossRef]
- Chen, F.C.; Jahanshahi, M.R. NB-CNN: Deep learning-based crack detection using convolutional neural network and Naïve Bayes data fusion. IEEE Trans. Ind. Electron. 2017, 65, 4392–4400. [Google Scholar] [CrossRef]
- Zhang, S.; Li, C.M.; Ye, W. Damage localization in plate-like structures using time-varying feature and one-dimensional convolutional neural network. Mech. Syst. Signal Process. 2020, 147, 107107. [Google Scholar] [CrossRef]
- Sikdar, S.; Liu, D.; Kundu, A. Acoustic emission data based deep learning approach for classification and detection of damage-sources in a composite panel. Compos. Part B Eng. 2021, 228, 109450. [Google Scholar] [CrossRef]
- Liu, W.; Tang, Z.; Lv, F.; Chen, X. Multi-feature integration and machine learning for guided wave structural health monitoring: Application to switch rail foot. Struct. Health Monit. 2021, 20, 1475921721989577. [Google Scholar] [CrossRef]
- Hou, R.; Xia, Y. Review on the new development of vibration-based damage identification for civil engineering structures: 2010–2019. J. Sound Vib. 2021, 491, 115741. [Google Scholar] [CrossRef]
- Santos, A.; Figueiredo, E.; Silva, M.F.; Sales, C.S.; Costa, J.C. Machine learning algorithms for damage detection: Kernel-based approaches. J. Sound Vib. 2016, 363, 584–599. [Google Scholar] [CrossRef]
- Nguyen, T.Q. A data-driven approach to structural health monitoring of bridge structures based on the discrete model and FFT-deep learning. J. Vib. Eng. Technol. 2021, 9, 1959–1981. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, J.; Teng, S.; Chen, G.; Teng, Z. Structural Damage Detection Based on Vibration Signal Fusion and Deep Learning. J. Vib. Eng. Technol. 2022, 10, 1205–1220. [Google Scholar] [CrossRef]
- Lu, X.; Xu, Y.; Tian, Y.; Cetiner, B.; Taciroglu, E. A deep learning approach to rapid regional post-event seismic damage assessment using time-frequency distributions of ground motions. Earthq. Eng. Struct. Dyn. 2021, 50, 1612–1627. [Google Scholar] [CrossRef]
- Zhan, J.; Wang, C.; Fang, Z. Condition Assessment of Joints in Steel Truss Bridges Using a Probabilistic Neural Network and Finite Element Model Updating. Sustainability 2021, 13, 1474. [Google Scholar] [CrossRef]
- Pham, H.C.; Ta, Q.-B.; Kim, J.-T.; Ho, D.-D.; Tran, X.-L.; Huynh, T.-C. Bolt-Loosening Monitoring Framework Using an Image-Based Deep Learning and Graphical Model. Sensors 2020, 20, 3382. [Google Scholar] [CrossRef] [PubMed]
- Gao, Y.; Mosalam, K.M.; Chen, Y.; Wang, W.; Chen, Y. Auto-Regressive Integrated Moving-Average Machine Learning for Damage Identification of Steel Frames. Appl. Sci. 2021, 11, 6084. [Google Scholar] [CrossRef]
- Sharma, R.; Pachori, R.B.; Acharya, U.R. Application of entropy measures on intrinsic mode functions for the automated identification of focal electroencephalogram signals. Entropy 2015, 17, 669–691. [Google Scholar] [CrossRef]
- Acharya, U.R.; Molinari, F.; Sree, S.V.; Chattopadhyay, S.; Ng, K.H.; Suri, J.S. Automated diagnosis of epileptic EEG using entropies. Biomed. Signal Process. Control 2012, 7, 401–408. [Google Scholar] [CrossRef] [Green Version]
- Fatimah, B.; Singh, P.; Singhal, A.; Pachori, R.B. Detection of apnea events from ECG segments using Fourier decomposition method. Biomed. Signal Process. Control 2020, 61, 102005. [Google Scholar] [CrossRef]
- Hassan, A.R. Automatic screening of obstructive sleep apnea from single-lead electrocardiogram. In Proceedings of the 2015 International Conference on Electrical Engineering and Information Communication Technology (ICEEICT), Savar, Bangladesh, 21–23 May 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Hassan, A.R. A comparative study of various classifiers for automated sleepapnea screening based on single-lead electrocardiogram. In Proceedings of the 2015 International Conference on Electrical Electronic Engineering (ICEEE), Rajshahi, Bangladesh, 4–6 November 2015; pp. 45–48. [Google Scholar] [CrossRef]
- Hassan, A.R.; Haque, M.A. Computer-aided obstructive sleep apnea identification using statistical features in the EMD domain and extreme learning machine. Biomed. Phys. Eng. Express 2016, 2, 035003. [Google Scholar] [CrossRef]
- Monforton, G.R.; Wu, T.S. Matrix analysis of semi-rigidly connected frames. J. Struct. Div. 1963, 89, 13–42. [Google Scholar] [CrossRef]
- Chan, S.L.; Ho, G.W.M. Nonlinear vibration analysis of steel frames with semirigid connections. J. Struct. Eng. 1994, 120, 1075–1087. [Google Scholar] [CrossRef]
- Chui, P.P.T.; Chan, S.L. Vibration and deflection characteristics of semi-rigid jointed frames. Eng. Struct. 1997, 19, 1001–1010. [Google Scholar] [CrossRef]
- Chu, S.C.; Tsai, P.W. Computational intelligence based on the behavior of cats. Int. J. Innov. Comput. Inf. Control 2007, 3, 163–173. [Google Scholar]
- Orouskhani, M.; Mansouri, M.; Teshnehlab, M. Average-inertia weighted cat swarm optimization. In International Conference in swarm Intelligence; Springer: Berlin/Heidelberg, Germany, 2011; pp. 321–328. [Google Scholar]
- Chopra, A.K.; Chandler, A.M. Dynamics of Structures: Theory and Applications to Earthquake Engineering; Pearson Education Limited: Essex, UK, 2014. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quantity | Pin Joint | Semi-Rigid Joint | Rigid Joint | Quantity |
|---|---|---|---|---|
| FF | 0–0.143 | 0.143–0.891 | 0.891–1 | FF |
| Condition of Structure | Details of Loosening |
|---|---|
| UL | Bolts are fully tight |
| BL1 | Right column-beam connection, bolts @ column face is hand tight |
| BL2 | Right column-beam connection, bolts @ column face is full loose |
| BL3 | Left column-beam connection, bolts @ beam face is hand tight |
| BL4 | Right column-beam connection, bolts @ beam face is full loose |
| BL5 | Left column-beam connection, bolts @ column face is hand tight |
| BL6 | Left column-beam connection, bolts @ column face is full loose |
| BL7 | Left column-beam connection, 2 bolts @ column face is full loose |
| Condition of Structures | Healthy Data | Loosened Data | Usage of Data | Remarks |
|---|---|---|---|---|
| UL | 10 (trial) × 12 (sensors) = 120 | - | Training + Validation | Training (100 healthy + 100 loosened) Validation (180 healthy + 60 loosened) |
| BL1 | 10 (trial) × 8 (sensors) = 80 | 20 (trial) × 4 (sensors) = 80 | ||
| BL2 | 10 (trial) × 8 (sensors) = 80 | 20 (trial) × 4 (sensors) = 80 | ||
| BL3 | 10 (trial) × 8 (sensors) = 80 | 10 (trial) × 4 (sensors) = 40 | Testing | Testing (320 healthy + 160 loosened) |
| BL4 | 10 (trial) × 8 (sensors) = 80 | 10 (trial) × 4 (sensors) = 40 | ||
| BL5 | 10 (trial) × 8 (sensors) = 80 | 10 (trial) × 4 (sensors) = 40 | ||
| BL6 | 10 (trial) × 8 (sensors) = 80 | 10 (trial) × 4 (sensors) = 40 | ||
| BL7 | 10 (trial) × 8 (sensors) = 80 | 10 (trial) × 4 (sensors) = 40 | Testing |
| Case | Training | Case | Validation | ||||
|---|---|---|---|---|---|---|---|
| Healthy | Loosened | Healthy | Loosened | ||||
| UL | Healthy | 40 | 0 | UL | Healthy | 80 | 0 |
| Loosened | 0 | 0 | Loosened | 0 | 0 | ||
| BL1 | Healthy | 30 | 0 | BL1 | Healthy | 40 | 10 |
| Loosened | 15 | 35 | Loosened | 11 | 19 | ||
| BL2 | Healthy | 30 | 0 | BL2 | Healthy | 44 | 6 |
| Loosened | 0 | 50 | Loosened | 0 | 30 | ||
| Av. Accuracy: | 92.5% | 88.75% | |||||
| Cases | Healthy | Loosened | |
|---|---|---|---|
| BL3 | Healthy | 67 | 13 |
| Loosened | 19 | 21 | |
| BL4 | Healthy | 72 | 8 |
| Loosened | 8 | 32 | |
| BL5 | Healthy | 65 | 15 |
| Loosened | 18 | 22 | |
| BL6 | Healthy | 70 | 10 |
| Loosened | 10 | 30 | |
| Accuracy | 79.0% | ||
| BL7 | Healthy | 80 | 0 |
| Loosened | 36 | 4 | |
| Condition | Fixity Factors Considering All Fixity Factors | Change (%) | Fixity Factors Considering Fixity Factors at Probable Locations | % Change | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| S2 | S3 | S4 | S5 | S2 | S3 | S4 | S5 | S2 | S3 | S4 | S4 | S2 | S3 | S4 | S5 | |
| UL | 0.54 | 0.66 | 0.69 | 0.54 | - | - | - | - | 0.54 | 0.66 | 0.69 | 0.54 | - | - | - | - |
| BL1 | 0.44 | 0.52 | 0.48 | 0.39 | 18.5 | 21.2 | 30.4 | 27.8 | 0.54 | 0.66 | 0.64 | 0.34 | - | - | 7.25 | 37.0 |
| BL2 | 0.51 | 0.61 | 0.54 | 0.31 | 5.6 | 7.6 | 21.7 | 42.6 | 0.54 | 0.66 | 0.57 | 0.25 | - | - | 17.40 | 50.0 |
| BL3 | 0.32 | 0.25 | 0.52 | 0.44 | 40.7 | 62.1 | 24.6 | 18.5 | 0.36 | 0.17 | 0.71 | 0.54 | 33.33 | 74.0 | - | - |
| BL4 | 0.41 | 0.48 | 0.32 | 0.41 | 24.1 | 27.3 | 53.6 | 24.1 | 0.56 | 0.66 | 0.23 | 0.37 | - | - | 66.67 | 31.48 |
| BL5 | 0.41 | 0.46 | 0.64 | 0.49 | 24.1 | 30.3 | 7.2 | 9.3 | 0.25 | 0.65 | 0.69 | 0.54 | 54.00 | 1.51 | - | - |
| BL6 | 0.29 | 0.34 | 0.53 | 0.42 | 46.3 | 48.5 | 23.2 | 22.2 | 0.19 | 0.63 | 0.69 | 0.57 | 64.00 | 4.5 | - | - |
| UL | 0.55 | 0.66 | 0.73 | 0.54 | 1.9 | 0.0 | 5.8 | 0.0 | - | - | - | - | - | - | - | - |
| Experimental Cases | Description of Loosening |
|---|---|
| NUL | FFs of all the springs are 0.891 |
| NBL1 | FF factor of S20 is 0.75 |
| NBL2 | FF of S19 is 0.75 |
| NBL3 | FF of S13 is 0.70 |
| NBL4 | FF of S7 is 0.70 |
| NBL5 | FF of S7 and S23 are 0.70 |
| Healthy Data | Loosened Data | Usage of Data | Remarks | |
|---|---|---|---|---|
| NUL | 24 (sensors) × 3 (noise level) = 72 | - | Training + Validation | Training (100 Healthy + 100 Loosened) Validation (101 Healthy + 50 Loosened) |
| NBL1 | 22 (sensors) × 3 (noise level) = 66 | 2 (sensors) × 30 (noise level) =60 | ||
| NBL2 | 21(sensors) × 3 (noise level)= 63 | 3 (sensors) × 30 (noise level) =90 | ||
| NBL3 | 21(sensors) × 3 (noise level) = 63 | 3 (sensors) × 20 (noise level) =60 | Testing | Testing (183 Healthy + 220 Loosened) |
| NBL4 | 21(sensors) × 3 (noise level) = 63 | 3 (sensors) × 20 (noise level) =60 | ||
| NBL5 | 19 (sensors) × 3 (noise level) = 57 | 5 (sensors) × 20 (noise level) =100 |
| Cases | Training | Cases | Validation | ||||
|---|---|---|---|---|---|---|---|
| Healthy | Loosened | Healthy | Loosened | ||||
| NUL | Healthy | 40 | 0 | NUL | Healthy | 32 | 0 |
| Loosened | 0 | 0 | Loosened | 0 | 0 | ||
| NBL1 | Healthy | 27 | 3 | NBL1 | Healthy | 30 | 6 |
| Loosened | 5 | 35 | Loosened | 5 | 15 | ||
| NBL2 | Healthy | 26 | 4 | NBL2 | Healthy | 28 | 5 |
| Loosened | 5 | 55 | Loosened | 6 | 24 | ||
| Avg. accuracy: | 91.50% | 85.40% | |||||
| Cases | Healthy | Loosened | |
|---|---|---|---|
| NBL3 | Healthy | 51 | 12 |
| Loosened | 9 | 51 | |
| NBL4 | Healthy | 56 | 7 |
| Loosened | 11 | 49 | |
| NBL5 | Healthy | 48 | 9 |
| Loosened | 5 | 55 | |
| Avg. Accuracy: | 77.00% | ||
| Type | Probable Locations | Actual Fixity Factor | Estimated Fixity Factor | ||||||
|---|---|---|---|---|---|---|---|---|---|
| NLB1 | S20 | S21 | - | 0.75 | 0.891 | - | 0.743 | 0.890 | - |
| NLB2 | S14 | S15 | S19 | 0.891 | 0.891 | 0.75 | 0.881 | 0.890 | 0.694 |
| NLB3 | S8 | S9 | S13 | 0.891 | 0.891 | 0.70 | 0.889 | 0.889 | 0.688 |
| NLB4 | S2 | S3 | S7 | 0.891 | 0.891 | 0.70 | 0.885 | 0.887 | 0.699 |
| NLB5 | S2 | S3 | S7 | 0.891 | 0.891 | 0.70 | 0.887 | 0.889 | 0.689 |
| S22 | S23 | - | 0.891 | 0.70 | - | 0.890 | 0.692 | - | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pal, J.; Sikdar, S.; Banerjee, S.; Banerji, P. A Combined Machine Learning and Model Updating Method for Autonomous Monitoring of Bolted Connections in Steel Frame Structures Using Vibration Data. Appl. Sci. 2022, 12, 11107. https://doi.org/10.3390/app122111107
Pal J, Sikdar S, Banerjee S, Banerji P. A Combined Machine Learning and Model Updating Method for Autonomous Monitoring of Bolted Connections in Steel Frame Structures Using Vibration Data. Applied Sciences. 2022; 12(21):11107. https://doi.org/10.3390/app122111107
Chicago/Turabian StylePal, Joy, Shirsendu Sikdar, Sauvik Banerjee, and Pradipta Banerji. 2022. "A Combined Machine Learning and Model Updating Method for Autonomous Monitoring of Bolted Connections in Steel Frame Structures Using Vibration Data" Applied Sciences 12, no. 21: 11107. https://doi.org/10.3390/app122111107