
Enhanced Search-and-Rescue Optimization-Enabled Secure Route Planning Scheme for Internet of Drones Environment

Abstract
:1. Introduction
- To the best of our knowledge, the ESRO-SRP technique for the IoD environment does not exist in the literature.
- Develop a new ESRO-SRP technique for a secure route selection process in the IoD environment.
- Derive an ESRO-SRP algorithm using the combination of QOBL with the traditional SRO algorithm and derive a fitness function involving multiple input parameters.
- Simulate the performance of the ESRO-SRP technique under varying levels of energy consumption in the IoD environment.
2. Materials and Methods
2.1. Overview of ESRO-SRO Algorithm
| Algorithm 1: Pseudo-code of the SRO algorithm |
| Begin rand [−1, 1] do End For do End For do End for End If End for Decide the existing finest place and upgrade Xbest End while Return Xbest End |
| Algorithm 2: Pseudo-code of QOBL |
else end if end for end for |
2.2. Process Involved in ESRO-SRP Technique
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Singh, M.; Aujla, G.S.; Bali, R.S. A Deep Learning-Based Blockchain Mechanism for Secure Internet of Drones Environment. IEEE Trans. Intell. Transport. Syst. 2021, 22, 4404–4413. [Google Scholar] [CrossRef]
- Lin, C.; He, D.; Kumar, N.; Choo, K.-K.R.; Vinel, A.; Huang, X. Security and Privacy for the Internet of Drones: Challenges and Solutions. IEEE Commun. Mag. 2018, 56, 64–69. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Ma, O.; Ansari, M.S.; Almalki, F.A. Survey on Collaborative Smart Drones and Internet of Things for Improving Smartness of Smart Cities. IEEE Access 2019, 7, 128125–128152. [Google Scholar] [CrossRef]
- Chatterjee, S.; Perumalla, S.; Siva Kumar, A.P. Design and Implementation of Novel Secure User Authentication System over Internet of Drones. Int. J. Syst. Syst. Eng. 2021, 11, 105–120. [Google Scholar] [CrossRef]
- Putranto, D.S.C.; Aji, A.K.; Wahyudono, B. Design and Implementation of Secure Transmission on Internet of Drones. In Proceedings of the 2019 IEEE 6th Asian Conference on Defence Technology (ACDT), Bali, Indonesia, 13–15 November 2019; pp. 128–135. [Google Scholar] [CrossRef]
- Al-Wesabi, F.N.; Obayya, M.; Hamza, M.A.; Alzahrani, J.S.; Gupta, D.; Kumar, S. Energy Aware Resource Optimization using Unified Metaheuristic Optimization Algorithm Allocation for Cloud Computing Environment. Sustain. Comput. Informatics Syst. 2022, 35, 100686. [Google Scholar] [CrossRef]
- Fitwi, H.; Nagothu, D.; Chen, Y.; Blasch, E. A Distributed Agent-Based Framework for a Constellation of Drones in a Military Operation. In Proceedings of the 2019 Winter Simulation Conference (WSC), National Harbor, MD, USA, 8–11 December 2019; pp. 2548–2559. [Google Scholar] [CrossRef]
- Abunadi, I.; Althobaiti, M.M.; Al-Wesabi, F.N.; Hilal, A.M.; Medani, M.; Hamza, M.A.; Rizwanullah, M.; Zamani, A.S. Federated Learning with Blockchain Assisted Image Classification for Clustered UAV Networks. Comput. Mater. Contin. 2022, 72, 1195–1212. [Google Scholar] [CrossRef]
- Sirohi, P.; Al-Wesabi, F.N.; Alshahrani, H.M.; Maheshwari, P.; Agarwal, A.; Dewangan, B.K.; Hilal, A.M.; Choudhury, T. Energy-Efficient Cloud Service Selection and Recommendation Based on QoS for Sustainable Smart Cities. Appl. Sci. 2021, 11, 9394. [Google Scholar] [CrossRef]
- Alrowais, F.; Almasoud, A.S.; Marzouk, R.; Al-Wesabi, F.N.; Hilal, A.M.; Rizwanullah, M.; Motwakel, A.; Yaseen, I. Artificial Intelligence Based Data Offloading Technique for Secure MEC Systems. Comput. Mater. Contin. 2022, 72, 2783–2795. [Google Scholar] [CrossRef]
- Singh, M.; Aujla, G.S.; Bali, R.S. ODOB: One Drone One Block-based Lightweight Blockchain Architecture for Internet of Drones. In Proceedings of the IEEE INFOCOM 2020—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Toronto, ON, Canada, 6–9 July 2020; pp. 249–254. [Google Scholar] [CrossRef]
- Guerber, C.; Royer, M.; Larrieu, N. Machine Learning and Software Defined Network to secure communications in a swarm of drones. J. Inf. Secur. Appl. 2021, 61, 102940. [Google Scholar] [CrossRef]
- Kuzmin, A.; Znak, E. Blockchain-base structures for a secure and operate network of semi-autonomous Unmanned Aerial Vehicles. In Proceedings of the 2018 IEEE International Conference on Service Operations and Logistics, and Informatics (SOLI), Singapore, 31 July–2 August 2018; pp. 32–37. [Google Scholar] [CrossRef]
- Ravi, N.; Chitanvis, R.; El-Sharkawy, M. Applications of Drones using Wireless Sensor Networks. In Proceedings of the 2019 IEEE National Aerospace and Electronics Conference (NAECON), Dayton, OH, USA, 15–19 July 2019; pp. 513–518. [Google Scholar] [CrossRef]
- Tian, Y.; Yuan, J.; Song, H. Efficient privacy-preserving authentication framework for edge-assisted Internet of Drones. J. Inf. Secur. Appl. 2019, 48, 102354. [Google Scholar] [CrossRef]
- Allouch, A.; Cheikhrouhou, O.; Koubâa, A.; Toumi, K.; Khalgui, M.; Gia, T.N. UTM-Chain: Blockchain-Based Secure Unmanned Traffic Management for Internet of Drones. Sensors 2021, 21, 3049. [Google Scholar] [CrossRef] [PubMed]
- Wazid, M.; Das, A.K.; Kumar, N.; Vasilakos, A.V.; Rodrigues, J.J.P.C. Design and Analysis of Secure Lightweight Remote User Authentication and Key Agreement Scheme in Internet of Drones Deployment. IEEE Internet Things J. 2018, 6, 3572–3584. [Google Scholar] [CrossRef]
- Gorrepati, R.R.; Guntur, S.R. DroneMap: An IoT Network Security in Internet of Drones. In Development and Future of Internet of Drones (IoD): Insights, Trends and Road Ahead; Springer: Cham, Switzerland, 2021; pp. 251–268. [Google Scholar] [CrossRef]
- Jain, D.K.; Tyagi, S.K.S.; Neelakandan, S.; Prakash, M.; Natrayan, L. Metaheuristic Optimization-Based Resource Allocation Technique for Cybertwin-Driven 6G on IoE Environment. IEEE Trans. Ind. Inform. 2021, 18, 4884–4892. [Google Scholar] [CrossRef]
- Goswami, P.; Mukherjee, A.; Maiti, M.; Tyagi, S.K.S.; Yang, L. A Neural-Network-Based Optimal Resource Allocation Method for Secure IIoT Network. IEEE Internet Things J. 2021, 9, 2538–2544. [Google Scholar] [CrossRef]
- Padmaa, M.; Jayasankar, T.; Venkatraman, S.; Dutta, A.K.; Gupta, D.; Shamshirband, S.; Rodrigues, J.J. Oppositional chaos game optimization based clustering with trust based data transmission protocol for intelligent IoT edge systems. J. Parallel Distrib. Comput. 2022, 164, 142–151. [Google Scholar] [CrossRef]
- Ahmad, M.; Ullah, F.; Wahid, I.; Khan, A.; Uddin, M.I.; Alharbi, A.; Alosaimi, W. A Bio-inspired Routing Optimization in UAV-enabled Internet of Everything. Comput. Mater. Contin. 2021, 67, 321–336. [Google Scholar] [CrossRef]
- Liu, B.; Zhang, W.; Chen, W.; Huang, H.; Guo, S. Online computation ofoading and trafc routing for UAV swarms in edge-cloud computing. IEEE Trans. Veh. Technol. 2020, 69, 8777–8791. [Google Scholar] [CrossRef]
- Baek, J.; Han, S.I.; Han, Y. Energy-efficient UAV routing for wireless sensor networks. IEEE Trans. Veh. Technol. 2020, 69, 1741–1750. [Google Scholar] [CrossRef]
- Yang, H.; Liu, Z. An optimization routing Protocol for FANETs. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 2–8. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Throughput (bytes/s) | |||||
|---|---|---|---|---|---|
| EC (%) | ESRO-SRP | BRUe-IoE | ORP-FANET | UAVe-WSN | TR-UAV Swarm |
| 5 | 33.95 | 14.54 | 14.54 | 9.69 | 7.75 |
| 10 | 36.86 | 17.45 | 14.54 | 12.60 | 1.93 |
| 15 | 44.62 | 19.39 | 20.36 | 12.60 | 5.81 |
| 20 | 60.15 | 34.92 | 20.36 | 15.51 | 9.69 |
| 25 | 100.90 | 74.70 | 25.21 | 17.45 | 8.72 |
| 30 | 114.48 | 89.26 | 31.04 | 21.33 | 14.54 |
| 35 | 138.74 | 112.54 | 37.83 | 28.12 | 15.51 |
| 40 | 142.62 | 105.75 | 37.83 | 31.04 | 21.33 |
| 45 | 149.42 | 123.22 | 44.62 | 38.80 | 24.24 |
| 50 | 152.33 | 126.13 | 64.03 | 52.38 | 32.98 |
| 55 | 157.18 | 129.04 | 81.49 | 63.06 | 36.86 |
| 60 | 154.27 | 133.89 | 92.17 | 71.79 | 44.62 |
| 65 | 155.24 | 134.86 | 102.84 | 71.79 | 47.53 |
| 70 | 163.00 | 141.65 | 100.90 | 79.55 | 55.29 |
| 75 | 178.53 | 148.45 | 108.66 | 84.40 | 64.03 |
| 80 | 187.26 | 157.18 | 108.66 | 88.28 | 69.85 |
| 85 | 187.26 | 160.09 | 112.54 | 97.99 | 79.55 |
| 90 | 187.26 | 162.03 | 125.16 | 100.90 | 85.37 |
| 95 | 188.23 | 164.94 | 142.62 | 110.60 | 96.05 |
| 100 | 189.20 | 165.91 | 140.68 | 110.60 | 99.93 |
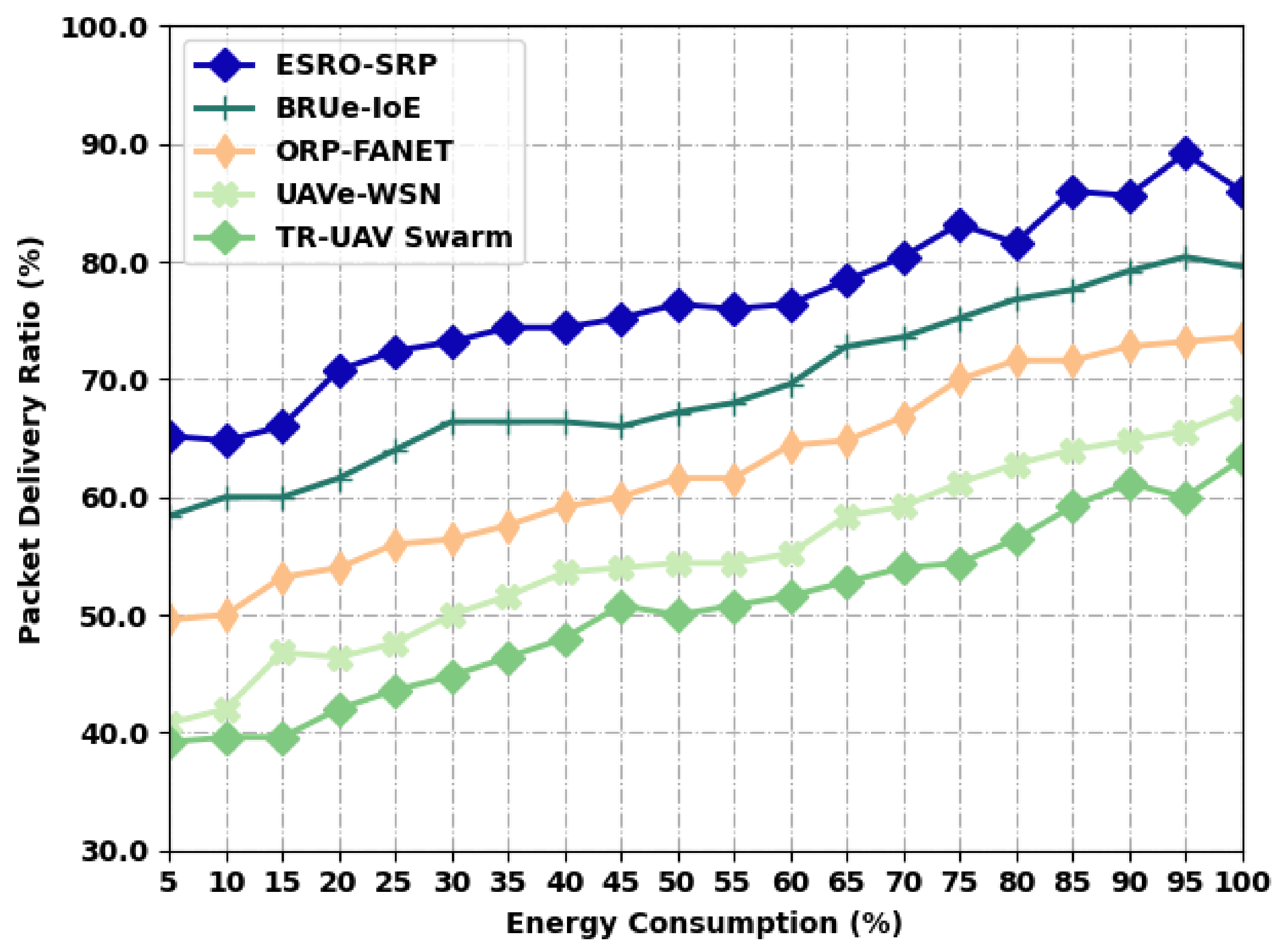
| Packet Delivery Ratio (%) | |||||
|---|---|---|---|---|---|
| EC (%) | ESRO-SRP | BRUe-IoE | ORP-FANET | UAVe-WSN | TR-UAV Swarm |
| 5 | 65.20 | 58.40 | 49.60 | 40.80 | 39.20 |
| 10 | 64.80 | 60.00 | 50.00 | 42.00 | 39.60 |
| 15 | 66.00 | 60.00 | 53.20 | 46.80 | 39.60 |
| 20 | 70.80 | 61.60 | 54.00 | 46.40 | 42.00 |
| 25 | 72.40 | 64.00 | 56.00 | 47.60 | 43.60 |
| 30 | 73.20 | 66.40 | 56.40 | 50.00 | 44.80 |
| 35 | 74.40 | 66.40 | 57.60 | 51.60 | 46.40 |
| 40 | 74.40 | 66.40 | 59.20 | 53.60 | 48.00 |
| 45 | 75.20 | 66.00 | 60.00 | 54.00 | 50.80 |
| 50 | 76.40 | 67.20 | 61.60 | 54.40 | 50.00 |
| 55 | 76.00 | 68.00 | 61.60 | 54.40 | 50.80 |
| 60 | 76.40 | 69.60 | 64.40 | 55.20 | 51.60 |
| 65 | 78.40 | 72.80 | 64.80 | 58.40 | 52.80 |
| 70 | 80.40 | 73.60 | 66.80 | 59.20 | 54.00 |
| 75 | 83.20 | 75.20 | 70.00 | 61.20 | 54.40 |
| 80 | 81.60 | 76.80 | 71.60 | 62.80 | 56.40 |
| 85 | 86.00 | 77.60 | 71.60 | 64.00 | 59.20 |
| 90 | 85.60 | 79.20 | 72.80 | 64.80 | 61.20 |
| 95 | 89.20 | 80.40 | 73.20 | 65.60 | 60.00 |
| 100 | 86.00 | 79.60 | 73.60 | 67.60 | 63.20 |
| Average HOPS (%) | |||||
|---|---|---|---|---|---|
| EC (%) | ESRO-SRP | BRUe-IoE | ORP-FANET | UAVe-WSN | TR-UAV Swarm |
| 5 | 9 | 7 | 5 | 5 | 2 |
| 10 | 9 | 7 | 6 | 5 | 2 |
| 15 | 10 | 7 | 6 | 5 | 2 |
| 20 | 11 | 8 | 6 | 5 | 2 |
| 25 | 14 | 10 | 8 | 5 | 2 |
| 30 | 16 | 12 | 9 | 5 | 3 |
| 35 | 16 | 12 | 10 | 6 | 3 |
| 40 | 16 | 13 | 10 | 6 | 4 |
| 45 | 17 | 14 | 11 | 6 | 4 |
| 50 | 17 | 14 | 11 | 7 | 3 |
| 55 | 18 | 15 | 11 | 7 | 4 |
| 60 | 20 | 15 | 12 | 8 | 4 |
| 65 | 20 | 15 | 12 | 8 | 5 |
| 70 | 21 | 16 | 12 | 9 | 6 |
| 75 | 21 | 18 | 13 | 9 | 6 |
| 80 | 21 | 18 | 15 | 9 | 6 |
| 85 | 22 | 19 | 18 | 10 | 7 |
| 90 | 24 | 20 | 18 | 10 | 7 |
| 95 | 24 | 22 | 20 | 10 | 6 |
| 100 | 23 | 22 | 21 | 11 | 7 |
| Coverage (%) | |||||
|---|---|---|---|---|---|
| EC (%) | ESRO-SRP | BRUe-IoE | ORP-FANET | UAVe-WSN | TR-UAV Swarm |
| 5 | 97.69 | 91.18 | 83.58 | 81.41 | 73.26 |
| 10 | 98.78 | 92.81 | 81.41 | 75.43 | 70.01 |
| 15 | 96.61 | 90.09 | 79.23 | 73.26 | 66.21 |
| 20 | 92.81 | 89.01 | 75.98 | 71.63 | 65.12 |
| 25 | 89.01 | 85.21 | 72.18 | 71.63 | 58.61 |
| 30 | 86.83 | 82.49 | 70.01 | 64.03 | 53.18 |
| 35 | 86.83 | 77.06 | 59.15 | 65.66 | 43.95 |
| 40 | 77.61 | 68.38 | 56.43 | 55.35 | 42.32 |
| 45 | 75.98 | 67.83 | 56.98 | 51.01 | 39.06 |
| 50 | 65.12 | 60.78 | 49.92 | 47.21 | 36.35 |
| 55 | 62.41 | 54.26 | 45.03 | 42.32 | 35.26 |
| 60 | 61.32 | 50.46 | 42.86 | 39.61 | 28.21 |
| 65 | 60.78 | 47.75 | 38.52 | 36.35 | 26.03 |
| 70 | 58.61 | 46.66 | 36.35 | 31.46 | 25.49 |
| 75 | 55.89 | 43.95 | 30.92 | 27.66 | 23.86 |
| 80 | 52.09 | 40.69 | 30.38 | 27.66 | 21.15 |
| 85 | 51.01 | 38.52 | 27.66 | 19.52 | 16.81 |
| 90 | 51.01 | 37.43 | 21.69 | 19.52 | 13.01 |
| 95 | 51.01 | 35.26 | 18.98 | 15.18 | 3.24 |
| 100 | 48.29 | 33.63 | 16.26 | 15.18 | 3.24 |
| Lifetime (No. of Rounds) | |||||
|---|---|---|---|---|---|
| EC (%) | ESRO-SRP | BRUe-IoE | ORP-FANET | UAVe-WSN | TR-UAV Swarm |
| 5 | 57 | 41 | 25 | 10 | 1 |
| 10 | 65 | 48 | 38 | 15 | 6 |
| 15 | 65 | 53 | 40 | 35 | 14 |
| 20 | 75 | 56 | 48 | 41 | 15 |
| 25 | 75 | 62 | 52 | 43 | 19 |
| 30 | 88 | 65 | 58 | 43 | 22 |
| 35 | 94 | 72 | 66 | 52 | 30 |
| 40 | 113 | 96 | 73 | 51 | 32 |
| 45 | 124 | 110 | 80 | 58 | 37 |
| 50 | 130 | 108 | 93 | 60 | 40 |
| 55 | 142 | 121 | 96 | 66 | 39 |
| 60 | 148 | 124 | 105 | 72 | 44 |
| 65 | 149 | 130 | 107 | 75 | 44 |
| 70 | 157 | 139 | 120 | 78 | 58 |
| 75 | 163 | 147 | 119 | 95 | 78 |
| 80 | 167 | 147 | 117 | 94 | 86 |
| 85 | 170 | 151 | 124 | 102 | 90 |
| 90 | 174 | 154 | 135 | 104 | 94 |
| 95 | 175 | 157 | 136 | 119 | 100 |
| 100 | 176 | 157 | 144 | 124 | 107 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
S. Alrayes, F.; Dhahbi, S.; S. Alzahrani, J.; Mehanna, A.S.; Al Duhayyim, M.; Motwakel, A.; Yaseen, I.; Atta Abdelmageed, A. Enhanced Search-and-Rescue Optimization-Enabled Secure Route Planning Scheme for Internet of Drones Environment. Appl. Sci. 2022, 12, 7950. https://doi.org/10.3390/app12157950
S. Alrayes F, Dhahbi S, S. Alzahrani J, Mehanna AS, Al Duhayyim M, Motwakel A, Yaseen I, Atta Abdelmageed A. Enhanced Search-and-Rescue Optimization-Enabled Secure Route Planning Scheme for Internet of Drones Environment. Applied Sciences. 2022; 12(15):7950. https://doi.org/10.3390/app12157950
Chicago/Turabian StyleS. Alrayes, Fatma, Sami Dhahbi, Jaber S. Alzahrani, Amal S. Mehanna, Mesfer Al Duhayyim, Abdelwahed Motwakel, Ishfaq Yaseen, and Amgad Atta Abdelmageed. 2022. "Enhanced Search-and-Rescue Optimization-Enabled Secure Route Planning Scheme for Internet of Drones Environment" Applied Sciences 12, no. 15: 7950. https://doi.org/10.3390/app12157950