
Population Symmetrization in Genetic Algorithms


Abstract
:1. Introduction
2. Method Description
- —dimension of the search space
- — dimensional hypercube
2.1. Reference Genetic Algorithm
| Algorithm 1 Genetic algorithm | |
| 1 | create random initial population: initialPopulatioIndividuals; |
| 2 | compute values of objective function: initialPopulatioValues; |
| 3 | while stopping criterion is NOT satisfied do |
| 4 | [nextPopulationIndividuals, nextPopulationValues] = stepGA (initialPopulationIndividuals, initialPopulationValues, … optionsOfGA, objectiveFunction); |
| 5 | |
| 6 | initialPopulationIndividuals = nextPopulationIndividuals; |
| 7 | initialPopulationValues = nextPopulationValues; |
| 9 | end |
| Algorithm 2 Genetic step | |
| 1 | [nextPopulationIndividuals, nextPopulationValues] = stepGA(initialPopulationIndividuals, initialPopulationValues, optionsOfGA, objectiveFunction) |
| 2 | fitness scaling; |
| 3 | choosing parents for the next generation; |
| 4 | copying elite individuals (if active; |
| 5 | crossover; |
| 6 | mutation; |
| 7 | forming the next generation of individuals (elite + children + mutants); |
| 8 | calculating values of objective function for each individual from the new population; |
| 9 | end |
- Representation: real-coded GA
- Population size:
- Fitness scaling: rank function
- Elitism: of population
- Crossover fraction:
- Crossover function
- ○
- intermediate (default): the children produced are within the hypercube defined by placing the parents at opposite vertices
- ○
- arithmetic (segment): the children produced are within the segment defined by the two parents (GASC)
- Gaussian mutation
- Stopping criterion: stagnation of the population—change in the value of the objective function for the best individual over 30 generations by less than the adopted precision
2.2. Memetic Algorithms (MA)
| Algorithm 3 Memetic algorithm in GA framework | |
| 1 | create random initial population: initialPopulatioIndividuals; |
| 2 | compute values of objective function: initialPopulatioValues; |
| 3 | while stopping criterion is NOT satisfied do |
| 4 | [nextPopulationIndividuals, nextPopulationValues] = stepGA (initialPopulationIndividuals, initialPopulationValues,… optionsOfGA, objectiveFunction); |
| 5 | |
| 6 | [initialPopulationIndividuals, initialPopulatioValues] = localSearchAlgorithm (nextPopulationIndividuals,… nextPopulationValues, objectiveFunction, otherParameters); |
| 9 | end |
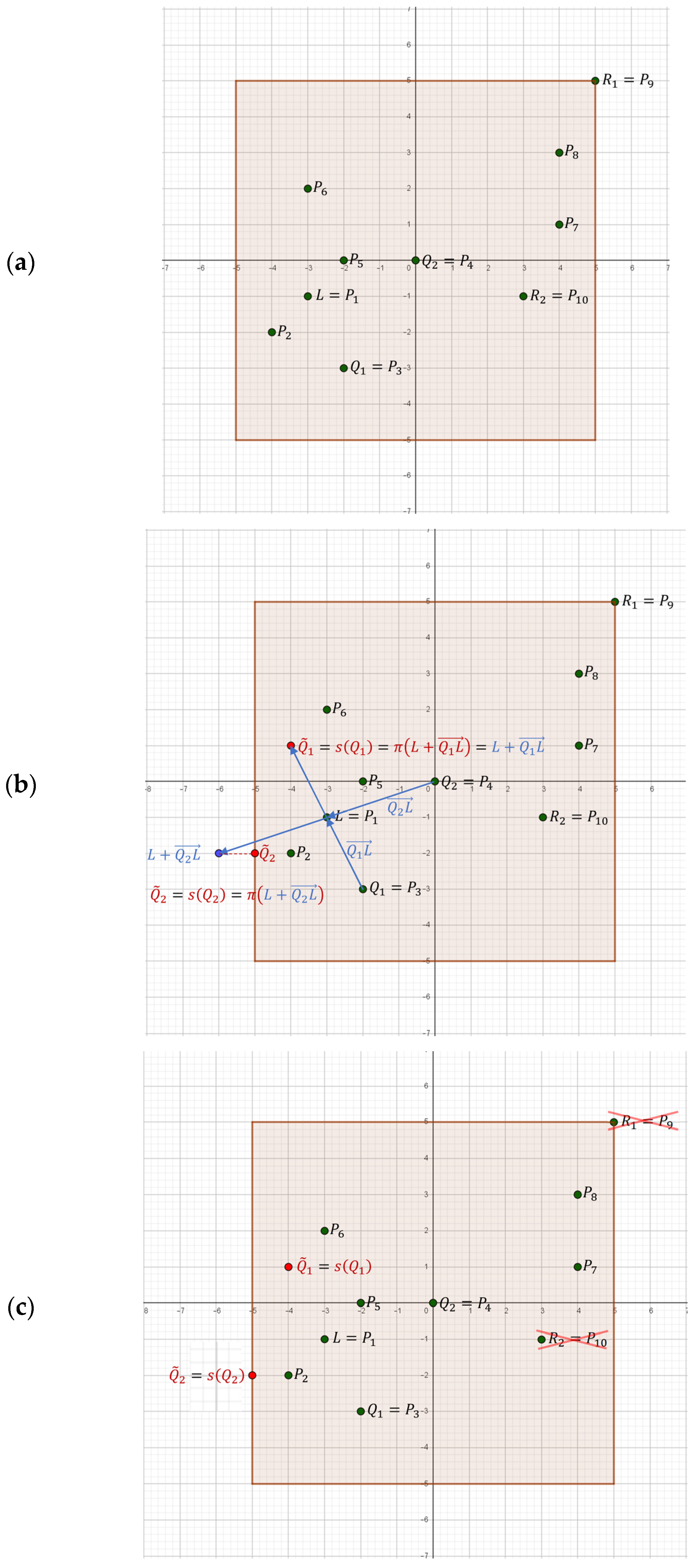
2.3. Genetic Algorithm with Symmetrization Operator (GASO)
| Algorithm 4 Memetic algorithm in GA framework with symmetrization operator | |
| 1 | create random initial population: initialPopulatioIndividuals; |
| 2 | compute values of objective function: initialPopulatioValues; |
| 3 | while stopping criterion is NOT satisfied do |
| 4 | [nextPopulationIndividuals, nextPopulationValues] = stepGA(initialPopulationIndividuals, initialPopulationValues,… optionsOfGA, objectiveFunction); |
| 5 | |
| 6 | [initialPopulationIndividuals, initialPopulatioValues] =… |
| 7 | symmetrization(nextPopulationIndividuals,… nextPopulationValues, objectiveFunction); |
| 8 | |
| 9 | end |
| Algorithm 5 Symmetrization operator | |
| 1 | [nextPopulationIndividuals, nextPopulationValues] =… Symmetrization (initialPopulationIndividuals,… initialPopulatioValues, objectiveFunction) |
| 2 | |
| 3 | determine the current leader … from the population initialPopulationIndividuals; |
| 4 | select points for symmetrization; // ,…, |
| 5 | for each of the selected points |
| 6 | within the cube find the image of the point… in symmetry with respect to the current leader… as defined in (13); |
| 7 | if the obtained image is better than the current leader |
| 8 | update the current leader |
| 9 | else |
| 11 | leave the leader unchanged |
| 12 | end |
| 13 | put the found images in the current population in place… of the worst individuals; |
| 14 | // -> ; -> nextPopulationIndividuals |
| 15 | end |
- GASO—with the default crossover operator (cube crossover);
- GASOSC—with segment crossover.
3. Experiments
3.1. Method of Testing the Effectiveness of Optimization Algorithms
- A set of 24 test functions divided into 5 classes according to their properties
- Data collection procedures during the optimization process
- Post-processing procedures that create comparative tables and charts on the basis of collected data
- Procedure for generating a document template containing generated tables and charts
3.2. Numerical Test Results
- Having a computing budget, e.g., calculations of the objective function, the GA algorithm solves approx. A total of of problems (finds the global minimum for of test functions with the assumed accuracy ). With the same computing budget, the GASO algorithm solves of problems. So we can conclude that with the above-mentioned calculation budget, GASO is percentage points more effective than GA. Illustration on the chart: green dashed lines.
- Solving of the problems needs calculations of the objective function for GASO while using GA it requires function calculations. GASO requires almost 40 times less computations of the objective function than the reference GA to solve 60% of the optimization problems considered. GASO is therefore 40 times faster than GA in solving 60% of problems. Illustration on the chart: blue dotted lines.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ∆fopt | 1 × 101 | 1 × 100 | 1 × 10−1 | 1 × 10−2 | 1 × 10−3 | 1 × 10−5 | 1 × 10−7 | #Succ |
|---|---|---|---|---|---|---|---|---|
| f1 | 11 | 12 | 12 | 12 | 12 | 12 | 12 | 15/15 |
| GA | 6.5 (20) | 83 (39) | 184 (48) | 321 (83) | 465 (130) | 872 (335) | 2132 (1127) | 15/15 |
| GASC | 12 (14) | 89 (47) | 225 (120) | 427 (185) | 742 (371) | 1494 (624) | 1.1 × 104 (6256) | 15/15 |
| GASO | 7.1 (5) | 82 (19) | 182 (27) | 274 (24) | 376 (29) | 561 (32) | 756 (40) | 15/15 |
| GASOSC | 11 (18) | 99 (33) | 177 (54) | 253 (66) | 347 (51) | 527 (71) | 719 (51) | 15/15 |
| f2 | 83 | 87 | 88 | 89 | 90 | 92 | 94 | 15/15 |
| GA | 68 (21) | 98 (25) | 128 (31) | 158 (38) | 196 (60) | 302 (58) | 1258 (176) | 15/15 |
| GASC | 93 (27) | 139 (48) | 185 (96) | 237 (90) | 289 (84) | 445 (277) | 6240 (2 × 104) | 15/15 |
| GASO | 44 (4) | 55 (6) | 68 (6) | 81 (8) | 92 (4) | 117 (7) | 137 (5) | 15/15 |
| GASOSC | 44 (12) | 56 (8) | 70 (4) | 79 (9) | 92 (6) | 116 (9) | 135 (8) | 15/15 |
| f3 | 716 | 1622 | 1637 | 1642 | 1646 | 1650 | 1654 | 15/15 |
| GA | 4.2 (0.9) | 8.9 (4) | 11 (5) | 13 (5) | 16 (4) | 23 (7) | 96 (162) | 15/15 |
| GASC | 4.2 (0.9) | 11 (5) | 14 (7) | 17 (4) | 20 (7) | 30 (6) | 535 (977) | 14/15 |
| GASO | 4.7 (2) | 6.6 (3) | 8.5 (2) | 9.0 (5) | 9.5 (3) | 11 (2) | 12 (3) | 15/15 |
| GASOSC | 4.7 (2) | 8.0 (2) | 9.4 (4) | 10 (4) | 11 (3) | 13 (3) | 15 (5) | 15/15 |
| f4 | 809 | 1633 | 1688 | 1758 | 1817 | 1886 | 1903 | 15/15 |
| GA | 5.7 (1) | 9 (5) | 24 (7) | 25 (8) | 27 (10) | 35 (7) | 2555 (3222) | 9/15 |
| GASC | 6.5 (2) | 19 (4) | 27 (17) | 29 (4) | 31 (7) | 38 (11) | 1571 (1730) | 11/15 |
| GASO | 5.1 (2) | 13 (4) | 25 (16) | 25 (17) | 24 (22) | 25 (14) | 25 (17) | 15/15 |
| GASOSC | 5.2 (0.9) | 19 (5) | 29 (9) | 29 (10) | 29 (12) | 29 (16) | 30 (14) | 15/15 |
| f5 | 10 | 10 | 10 | 10 | 10 | 10 | 10 | 15/15 |
| GA | 401 (89) | 2212 (826) | 1.9 × 104 (3 × 104) | 1.0 × 106 (5 × 105) | 7.2 × 106 (9 × 106) | 0/15 | ||
| GASC | 400 (178) | 1531 (601) | 2566 (475) | 4370 (812) | 7246 (4763) | 2.4 × 105 (4 × 105) | 3.3 × 106 (5 × 106) | 2/15 |
| GASO | 106 (4) | 125 (30) | 125 (58) | 125 (31) | 125 (31) | 125 (59) | 125 (58) | 15/15 |
| GASOSC | 112 (27) | 132 (28) | 132 (42) | 132 (57) | 132 (28) | 132 (28) | 132 (57) | 15/15 |
| f6 | 114 | 214 | 281 | 404 | 580 | 1038 | 1332 | 15/15 |
| GA | 13 (5) | 31 (12) | 68 (32) | 99 (53) | 109 (14) | 2600 (1752) | 5.3 × 104 (6 × 104) | 1/15 |
| GASC | 14 (4) | 36 (15) | 80 (27) | 114 (56) | 127 (53) | 1603 (1401) | 2.5 × 104 (4 × 104) | 2/15 |
| GASO | 13 (6) | 19 (4) | 25 (5) | 26 (4) | 24 (3) | 19 (2) | 20 (1) | 15/15 |
| GASOSC | 12 (3) | 18 (4) | 35 (41) | 43 (10) | 43 (43) | 54 (41) | 155 (203) | 15/15 |
| f7 | 24 | 324 | 1171 | 1451 | 1572 | 1572 | 1597 | 15/15 |
| GA | 28 (11) | 7.7 (2) | 12 (18) | 15 (16) | 17 (15) | 17 (26) | 18 (8) | 15/15 |
| GASC | 23 (16) | 5.6 (3) | 14 (11) | 38 (45) | 44 (66) | 44 (41) | 44 (34) | 15/15 |
| GASO | 26 (18) | 5.8 (2) | 3.0 (0.4) | 3.5 (0.5) | 3.5 (0.5) | 3.5 (0.5) | 3.9 (0.7) | 15/15 |
| GASOSC | 29 (10) | 5.7 (1) | 2.8 (1) | 3.3 (0.4) | 3.2 (0.5) | 3.2 (1.0) | 3.5 (0.7) | 15/15 |
| f8 | 73 | 273 | 336 | 372 | 391 | 410 | 422 | 15/15 |
| GA | 32 (12) | 117 (92) | 554 (164) | 1.1 × 104 (1 × 104) | 5.7 × 104 (4 × 104) | ∞ | ∞5.0 × 106 | 0/15 |
| GASC | 30 (4) | 86 (41) | 392 (175) | 6584 (6838) | 2.0 × 104 (2 × 104) | ∞ | ∞5.0 × 106 | 0/15 |
| GASO | 30 (6) | 35 (3) | 39 (23) | 44 (38) | 50 (35) | 63 (7) | 73 (30) | 15/15 |
| GASOSC | 26 (4) | 23 (15) | 27 (13) | 30 (18) | 32 (6) | 37 (13) | 41 (16) | 15/15 |
| f9 | 35 | 127 | 214 | 263 | 300 | 335 | 369 | 15/15 |
| GA | 67 (8) | 959 (2533) | 1.1 × 105 (8 × 104) | ∞ | ∞ | ∞ | ∞5.0 × 106 | 0/15 |
| GASC | 58 (10) | 503 (550) | 2.2 × 104 (3 × 104) | 1.4 × 105 (65855) | 2.5 × 105 (5 × 105) | ∞ | ∞5.0 × 106 | 0/15 |
| GASO | 55 (22) | 48 (10) | 49 (14) | 49 (14) | 56 (15) | 70 (14) | 83 (20) | 15/15 |
| GASOSC | 54 (11) | 55 (62) | 48 (44) | 46 (37) | 45 (17) | 47 (14) | 49 (23) | 15/15 |
| f10 | 349 | 500 | 574 | 607 | 626 | 829 | 880 | 15/15 |
| GA | 1478 (747) | 5129 (5387) | 58957 (59058) | 1.2 × 105 (1 × 105) | ∞ | ∞ | ∞5.0 × 106 | 0/15 |
| GASC | 2278 (1784) | 4693 (573) | 61284 (84901) | 1.2 × 105 (1 × 105) | ∞ | ∞ | ∞5.0 × 106 | 0/15 |
| GASO | 31 (20) | 37 (16) | 53 (25) | 64 (19) | 80 (21) | 119 (106) | 1700 (3161) | 14/15 |
| GASOSC | 13 (2) | 12 (3 | 13 (2) | 14 (1) | 15 (20 | 14 (2) | 16 (2) | 15/15 |
| f11 | 143 | 202 | 763 | 977 | 1177 | 1467 | 1673 | 15/15 |
| GA | 494 (1263) | 5235 (16,771) | 7703 (11,197) | 21,366 (24,263) | ∞ | ∞ | ∞5.0 × 106 | 0/15 |
| GASC | 88 (232) | 1617 (4927) | 1597 (738) | 2490 (2527) | 10,664 (11340) | ∞ | ∞5.0 × 106 | 0/15 |
| GASO | 27 (20) | 45 (16) | 20 (8) | 21 (6) | 22 (6) | 27 (7) | 108 (222) | 14/15 |
| GASOSC | 14 (5) | 18 (2) | 6.4 (1) | 6.3 (1) | 6.2 (1) | 6.4 (0.5) | 6.9 (0.6) | 15/15 |
| f12 | 108 | 268 | 371 | 413 | 461 | 1303 | 1494 | 15/15 |
| GA | 84 (18) | 1088 (1044) | 2476 (4365) | 3819 (2294) | 9005 (9476) | 5.5 × 104 (7 × 104) | ∞5.0 × 106 | 0/15 |
| GASC | 482 (851) | 1396 (317) | 2538 (2599) | 4290 (2636) | 9784 (1 × 104) | ∞ | ∞5.0 × 106 | 0/15 |
| GASO | 151 (69) | 131 (41) | 159 (91) | 177 (203) | 208 (174) | 213 (401) | 3375 (2673) | 8/15 |
| GASOSC | 69 (3) | 57 (49) | 61 (67) | 67 (53) | 69 (46) | 31 (13) | 36 (23) | 15/15 |
| f13 | 132 | 195 | 250 | 319 | 1310 | 1752 | 2255 | 15/15 |
| GA | 171 (512) | 2378 (429) | 7002 (6945) | 8492 (2 × 104) | 3577 (4272) | 2.0 × 104 (2 × 104) | ∞5.0 × 106 | 0/15 |
| GASC | 58 (90) | 2260 (530) | 3585 (7272) | 6755 (8523) | 4206 (3977) | 2.0 × 104 (1 × 104) | ∞5.0 × 106 | 0/15 |
| GASO | 30 (6) | 41 (8) | 54 (8) | 111 (84) | 61 (92) | 394 (454) | 4024 (4054) | 6/15 |
| GASOSC | 24 (6) | 26 (2) | 29 (2) | 31 (2) | 9.2 (2) | 9.3 (2) | 9.1 (0.9) | 145/15 |
| f14 | 10 | 41 | 58 | 90 | 139 | 251 | 476 | 15/15 |
| GA | 1.7 (1) | 24 (3) | 43 (10) | 49 (15) | 74 (65) | 6913 (14125) | ∞5.0 × 106 | 0/15 |
| GASC | 1.4 (5) | 21 (8 | 41 (8) | 52 (11) | 100 (61) | 12530 (17044) | ∞5.0 × 106 | 0/15 |
| GASO | 1.7 (5) | 19 (5) | 38 (3) | 40 (4) | 42 (5) | 62 (12) | 1084 (1057) | 2/15 |
| GASOSC | 1.5 (2) | 17 (13) | 35 (10) | 39 (7) | 35 (5) | 33 (3) | 24 (1) | 15/15 |
| f15 | 5 | 9310 | 19,369 | 19,743 | 20,073 | 20,769 | 21,359 | 14/15 |
| GA | 7.5 (2) | 26 (77) | 78 (86) | 77 (21) | 76 (82) | 105 (128) | 1672 (2443) | 2/15 |
| GASC | 6.1 (0.9) | 37 (63) | 125 (156) | 123 (131) | 122 (51) | 167 (320) | 1600 (1405) | 2/15 |
| GASO | 8.0 (2) | 9.1 (10) | 14 (16) | 14 (16) | 14 (15) | 13 (16) | 13 (8) | 15/15 |
| GASOSC | 6.1 (3) | 14 (24) | 57 (55) | 56 (47) | 55 (36) | 53 (34) | 52 (34) | 15/15 |
| f16 | 120 | 612 | 2663 | 10,163 | 10,449 | 11,644 | 12,095 | 15/15 |
| GA | 3.0 (3) | 22 (4) | 19 (17) | 14 (20) | 109 (157) | 1042 (1505) | 1285 (232) | 2/15 |
| GASC | 3.1 (2) | 15 (30) | 35 (51) | 28 (27) | 110 (161) | 851 (1503) | ∞5.0 × 106 | 0/15 |
| GASO | 2.8 (2) | 8.7 (2) | 8.9 (7) | 3.4 (6) | 3.8 (5) | 4.3 (5) | 4.4 (3) | 15/15 |
| GASOSC | 3.2 (3) | 16 (15) | 12 (8) | 4.8 (6) | 6.4 (6) | 10 (19) | 10 (18) | 15/15 |
| f17 | 5.2 | 215 | 899 | 2861 | 3669 | 6351 | 7934 | 15/15 |
| GA | 3.7 (2) | 7.9 (3) | 7.1 (3) | 31 (38) | 109 (161) | 1164 (1396) | ∞5.0 × 106 | 0/15 |
| GASC | 3.2 (3) | 8.2 (5) | 47 (23) | 61 (54) | 261 (362) | ∞ | ∞5.0 × 106 | 0/15 |
| GASO | 2.5 (5) | 7.6 (2) | 5.3 (0.9) | 2.6 (0.1) | 3.0 (0.3) | 3.3 (0.3) | 4.8 (1) | 15/15 |
| GASOSC | 3.3 (3) | 7.4 (2) | 4.7 (1) | 3.7 (4) | 10 (11) | 19 (23) | 94 (107) | 15/15 |
| f18 | 103 | 378 | 3968 | 8451 | 9280 | 10,905 | 12,469 | 15/15 |
| GA | 6.4 (3) | 10 (3) | 16 (22) | 74 (46) | 353 (730) | 3323 (3210) | ∞5.0 × 106 | 0/15 |
| GASC | 6.6 (3) | 12 (2) | 25 (9) | 291 (524) | 3882 (6186) | ∞ | ∞5.0 × 106 | 0/15 |
| GASO | 7.3 (6) | 9.3 (1) | 3.5 (1) | 5.2 (6) | 10 (13) | 30 (52) | 92 (190) | 12/15 |
| GASOSC | 6.3 (3) | 8.3 (2) | 3.2 (0.4) | 5.9 (5) | 18 (17) | 100 (135) | 172 (145) | 12/15 |
| f19 | 1 | 1 | 242 | 1.0 × 105 | 1.2 × 105 | 1.2 × 105 | 1.2 × 105 | 15/15 |
| GA | 55 (137) | 1995 (665) | 302 (618) | 148 (107) | 278 (507) | 588 (743) | ∞5.0 × 106 | 0/15 |
| GASC | 46 (61) | 2572 (1246) | 427 (676) | 32 (21) | 205 (198) | 307 (433) | 613 (625) | 1/15 |
| GASO | 15 (9) | 2955 (1240) | 162 (165) | 15 (30) | 47 (66) | 46 (42) | 46 (59) | 9/15 |
| GASOSC | 17 (28) | 2853 (828) | 147 (184) | 23 (20) | 41 (61) | 41 (81) | 41 (58) | 9/15 |
| f20 | 16 | 851 | 38,111 | 51,362 | 54,470 | 54,861 | 55,313 | 14/15 |
| GA | 14 (18) | 8.5 (3) | 4.7 (7) | 3.6 (6) | 3.5 (8) | 4.9 (8) | 41 (63) | 7/15 |
| GASC | 22 (16) | 14 (23) | 17 (13) | 12 (7) | 12 (5) | 12 (9) | 78 (151) | 4/15 |
| GASO | 26 (13) | 7.5 (6) | 3.8 (4) | 2.9 (1) | 2.7 (4) | 2.7 (1) | 2.8 (1) | 15/15 |
| GASOSC | 22 (17) | 15 (10) | 13 (19) | 10 (9) | 9.4 (3) | 9.4 (2) | 9.4 (15) | 15/15 |
| f21 | 41 | 1157 | 1674 | 1692 | 170 | 1729 | 1757 | 14/15 |
| GA | 4.2 (4) | 6.4 (7) | 6.5 (9) | 7.7 (10) | 9.4 (12) | 15 (15) | 46 (32) | 15/15 |
| GASC | 1.9 (2) | 17 (24) | 13 (22) | 14 (8) | 16 (19) | 26 (20) | 43 (23) | 15/15 |
| GASO | 3.0 (5) | 2.8 (6) | 4.3 (7) | 4.6 (7) | 4.9 (7) | 5.7 (7) | 6.4 (0.5) | 15/15 |
| GASOSC | 2.9 (3) | 2.8 (1.0) | 6.0 (7) | 6.3 (8) | 6.6 (7) | 7.1 (4) | 7.7 (8) | 15/15 |
| f22 | 71 | 386 | 938 | 980 | 1008 | 1040 | 1068 | 14/15 |
| GA | 5.1 (6) | 10 (21) | 10 (13) | 19 (14) | 35 (32) | 199 (220) | 1072 (373) | 11/15 |
| GASC | 5.2 (6) | 5.3 (11) | 9.3 (18) | 12 (9) | 19 (39) | 187 (347) | 1290 (1961) | 13/15 |
| GASO | 5.6 (4) | 4.6 (0.8) | 13 (13) | 13 (23) | 14 (23) | 15 (22) | 17 (2) | 15/15 |
| GASOSC | 4.2 (4) | 12 (31) | 7.5 (13) | 8.7 (12) | 9.2 (18) | 10 (9) | 11 (18) | 15/15 |
| f23 | 3.0 | 518 | 14249 | 27890 | 31654 | 33030 | 34256 | 15/15 |
| GA | 2.0 (2) | 14 (7) | 16 (17) | 203 (242) | 1103 (1406) | ∞ | ∞5.0 × 106 | 0/15 |
| GASC | 1.9 (1) | 11 (3) | 27 (43) | 192 (357) | 2296 (1027) | ∞ | ∞5.0 × 106 | 0/15 |
| GASO | 2.5 (3) | 10 (6) | 2.8 (2) | 1.7 (3) | 1.6 (2) | 1.8 (2) | 1.9 (2) | 15/15 |
| GASOSC | 1.9 (0.8) | 11 (4) | 7.9 (10) | 7.4 (9) | 6.8 (9) | 11 (13) | 13 (12) | 15/15 |
| f24 | 1622 | 2.2 × 105 | 6.4 × 106 | 9.6 × 106 | 9.6 × 106 | 1.3 × 107 | 1.3 × 107 | 3/15 |
| GA | 4.3 (2) | 25 (26) | ∞ | ∞ | ∞ | ∞ | ∞5.0 × 106 | 0/15 |
| GASC | 3.4 (0.8) | 47 (30) | ∞ | ∞ | ∞ | ∞ | ∞5.0 × 106 | 0/15 |
| GASO | 4.3 (2) | 23 (36) | ∞ | ∞ | ∞ | ∞ | ∞5.0 × 106 | 0/15 |
| GASOSC | 2.9 (0.8) | 12 (8) | ∞ | ∞ | ∞ | ∞ | ∞5.0 × 106 | 0/15 |
References
- Boussaïd, I.; Lepagnot, J.; Siarry, P. A survey on optimization metaheuristics. Inf. Sci. 2013, 237, 82–117. [Google Scholar] [CrossRef]
- Kirkpatrick, S.; Gelatt, C.D., Jr.; Vecchi, M.P. Optimization by Simulated Annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef]
- Glover, F. Paths for Integer Programming. Comput. Oper. Res. 1986, 13, 533–549. [Google Scholar]
- Mladenović, N.; Dražić, M.; Kovačevic-Vujčić, V.; Čangalović, M. General variable neighborhood search for the continuous optimization. Eur. J. Oper. Res. 2008, 191, 753–770. [Google Scholar] [CrossRef]
- Voudouris, C. Guided Local Search—An Illustrative Example in Function Optimisation. BT Technol. J. 1998, 16, 46–50. [Google Scholar] [CrossRef]
- Stutzle, T.G. Local Search Algorithms for Combinatorial Problems. Ph.D. Thesis, Darmstadt University of Technology, Darmstadt, Germany, 1998. [Google Scholar]
- Holland, J.H. Adaptation in Natural and Artificial Systems, 1st ed.; University of Michigan Press: Ann Arbor, MI, USA, 1975. [Google Scholar]
- Rechenberg, I. Evolution Strategy: Nature’s Way of Optimization. In Optimization: Methods and Applications, Possibilities and Limitations; Springer: Berlin/Heidelberg, Germany, 1989; pp. 106–126. [Google Scholar] [CrossRef]
- Koza, J.R. Genetic programming as a means for programming computers by natural selection. Stat. Comput. 1994, 4, 87–112. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential evolution—A simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Reynolds, R.G. An introduction to cultural algorithms. In Proceedings of the Third Annual Conference on Evolutionary Programming, San Diego, CA, USA, 24–26 February 1994; pp. 131–139. [Google Scholar]
- Dorigo, M.; Maniezzo, V.; Colorni, A.; Dorigo, M. Positive Feedback as a Search Strategy. Technical Report 91-016. 1991. pp. 1–20. Available online: http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.52.6342 (accessed on 1 April 2022).
- Kennedy, J.; Eberhart, R. Particle Swarm Optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar] [CrossRef]
- Karaboga, D.; Akay, B. A survey: Algorithms simulating bee swarm intelligence. Artif. Intell. Rev. 2009, 31, 61–85. [Google Scholar] [CrossRef]
- Timmis, J.; Andrews, P.; Owens, N.; Clark, E. An interdisciplinary perspective on artificial immune systems. Evol. Intell. 2008, 1, 5–26. [Google Scholar] [CrossRef] [Green Version]
- Talbi, E.-G. Machine Learning into Metaheuristics. ACM Comput. Surv. 2022, 54, 1–32. [Google Scholar] [CrossRef]
- Katoch, S.; Chauhan, S.S.; Kumar, V. A review on genetic algorithm: Past, present, and future. Multimed. Tools Appl. 2021, 80, 8091–8126. [Google Scholar] [CrossRef] [PubMed]
- Lee, C. A review of applications of genetic algorithms in operations management. Eng. Appl. Artif. Intell. 2018, 76, 1–12. [Google Scholar] [CrossRef]
- Hiassat, A.; Diabat, A.; Rahwan, I. A genetic algorithm approach for location-inventory-routing problem with perishable products. J. Manuf. Syst. 2017, 42, 93–103. [Google Scholar] [CrossRef]
- Kaur, M.; Kumar, V. Parallel non-dominated sorting genetic algorithm-II-based image encryption technique. Imaging Sci. J. 2018, 66, 453–462. [Google Scholar] [CrossRef]
- Wolpert, D.H.; Macready, W.G. No free lunch theorems for optimization. IEEE Trans. Evol. Comput. 1997, 1, 67–82. [Google Scholar] [CrossRef] [Green Version]
- Wright, A.H. Genetic Algorithms for Real Parameter Optimization. In Foundations of Genetic Algorithms; Elsevier: Amsterdam, The Netherlands, 1991; pp. 205–218. [Google Scholar] [CrossRef]
- Michalewicz, Z. Genetic Algorithms + Data Structures = Evolution Programs; Springer: Berlin/Heidelberg, Germany, 1996. [Google Scholar]
- Chuang, Y.-C.; Chen, C.-T.; Hwang, C. A simple and efficient real-coded genetic algorithm for constrained optimization. Appl. Soft Comput. 2016, 38, 87–105. [Google Scholar] [CrossRef]
- Das, A.K.; Pratihar, D.K. A Direction-Based Exponential Crossover Operator for Real-Coded Genetic Algorithm. In Recent Advances in Theoretical, Applied, Computational and Experimental Mechanics; Springer: Singapore, 2020; pp. 311–323. [Google Scholar]
- Ono, I.; Kita, H.; Kobayashi, S. A Real-coded Genetic Algorithm using the Unimodal Normal Distribution Crossover. In Advances in Evolutionary Computing; Springer: Berlin/Heidelberg, Germany, 2003; pp. 213–237. [Google Scholar]
- Deep, K.; Thakur, M. A new crossover operator for real coded genetic algorithms. Appl. Math. Comput. 2007, 188, 895–911. [Google Scholar] [CrossRef]
- Das, A.K.; Pratihar, D.K. A Direction-Based Exponential Mutation Operator for Real-Coded Genetic Algorithm. In Proceedings of the 2018 Fifth International Conference on Emerging Applications of Information Technology (EAIT), Kolkata, India, 12–13 January 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Tang, P.-H.; Tseng, M.-H. Adaptive directed mutation for real-coded genetic algorithms. Appl. Soft Comput. 2013, 13, 600–614. [Google Scholar] [CrossRef]
- Hussain, A.; Muhammad, Y.S. Trade-off between exploration and exploitation with genetic algorithm using a novel selection operator. Complex Intell. Syst. 2020, 6, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.-C.; Cao, M.; Zhan, Z.-H.; Liu, D.; Zhang, J. A New and Efficient Genetic Algorithm with Promotion Selection Operator. In Proceedings of the 2020 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Toronto, ON, Canada, 11–14 October 2020; pp. 1532–1537. [Google Scholar] [CrossRef]
- Espinoza, F.P.; Minsker, B.; Goldberg, D.E. Performance Evaluation and Population Reduction for a Self Adaptive Hybrid Genetic Algorithm (SAHGA). Lect. Notes Comput. Sci. 2003, 2723, 922–933. [Google Scholar] [CrossRef]
- Elmihoub, T.; Hopgood, A.A.; Nolle, L.; Battersby, A. Performance of hybrid genetic algorithms incorporating local search. In Proceedings of the 18th European Simulation Multiconference, Nottingham, UK, 13–16 June 2004; Volume 4, pp. 154–160. Available online: http://scs-europe.net/services/esm2004/pdf/esm-56.pdf (accessed on 1 April 2022).
- Konak, A.; Smith, A. A hybrid genetic algorithm approach for backbone design of communication networks. In Proceedings of the 1999 Congress on Evolutionary Computation-CEC99 (Cat. No. 99TH8406), Washington, DC, USA, 6–9 July 1999; Volume 3, pp. 1817–1823. [Google Scholar] [CrossRef]
- Hedar, A.-R.; Fukushima, M. Simplex Coding Genetic Algorithm for the Global Optimization of Nonlinear Functions. In Multi-Objective Programming and Goal Programming; Springer: Berlin/Heidelberg, Germany, 2003; pp. 135–140. [Google Scholar]
- Chaiyaratana, N.; Zalzala, A.M.S. Hybridisation of neural networks and a genetic algorithm for friction compensation. In Proceedings of the 2000 Congress on Evolutionary Computation. CEC00 (Cat. No. 00TH8512), La Jolla, CA, USA, 16–19 July 2000; Volume 1, pp. 22–29. [Google Scholar] [CrossRef]
- Neri, F.; Cotta, C. Memetic algorithms and memetic computing optimization: A literature review. Swarm Evol. Comput. 2012, 2, 1–14. [Google Scholar] [CrossRef]
- Goldberg, D.E. Genetic Algorithms in Search, Optimization, and Machine Learning; Addison-Wesley Longman Publishing Co., Inc.: Boston, MA, USA, 1989. [Google Scholar]
- Dawkins, R. The Selfish Gene: 30th Anniversary Edition; Oxford University Press: Oxford, UK, 2006; Volume 214. [Google Scholar]
- Norman, M.G.; Moscato, P. A Competitive-Cooperative Approach to Complex Combinatorial Search. In Proceedings of the 20th Informatics and Operations Research Meeting, July 1999; pp. 15–29. Available online: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.44.776&rep=rep1&type=pdf (accessed on 1 April 2022).
- Hart, W.E.; Krasnogor, N.; Smith, J.E. Memetic Evolutionary Algorithms. In Recent Advances in Memetic Algorithms; Springer: Berlin/Heidelberg, Germany, 2006; pp. 3–27. [Google Scholar]
- Hansen, N.; Auger, A.; Finck, S.; Ros, R. Real-Parameter Black-Box Optimization Benchmarking BBOB-2010: Experimental Setup; INRIA Research Report; INRIA: Le Chesnay-Rocquencourt, France, 2010; pp. 1–18. Available online: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.168.5204&rep=rep1&type=pdf (accessed on 1 April 2022).
- Finck, S.; Ros, R. Real-Parameter Black-Box Optimization Benchmarking 2010: Noiseless Functions Definitions. 2010. pp. 1–12. Available online: http://coco.gforge.inria.fr/bbob2010-downloads (accessed on 1 April 2022).








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kusztelak, G.; Lipowski, A.; Kucharski, J. Population Symmetrization in Genetic Algorithms. Appl. Sci. 2022, 12, 5426. https://doi.org/10.3390/app12115426
Kusztelak G, Lipowski A, Kucharski J. Population Symmetrization in Genetic Algorithms. Applied Sciences. 2022; 12(11):5426. https://doi.org/10.3390/app12115426
Chicago/Turabian StyleKusztelak, Grzegorz, Adam Lipowski, and Jacek Kucharski. 2022. "Population Symmetrization in Genetic Algorithms" Applied Sciences 12, no. 11: 5426. https://doi.org/10.3390/app12115426