
Application of Fatigue Damage Evaluation Considering Linear Hydroelastic Effects of Very Large Container Ships Using 1D and 3D Structural Models


Abstract
:1. Introduction
2. Theoretical Background
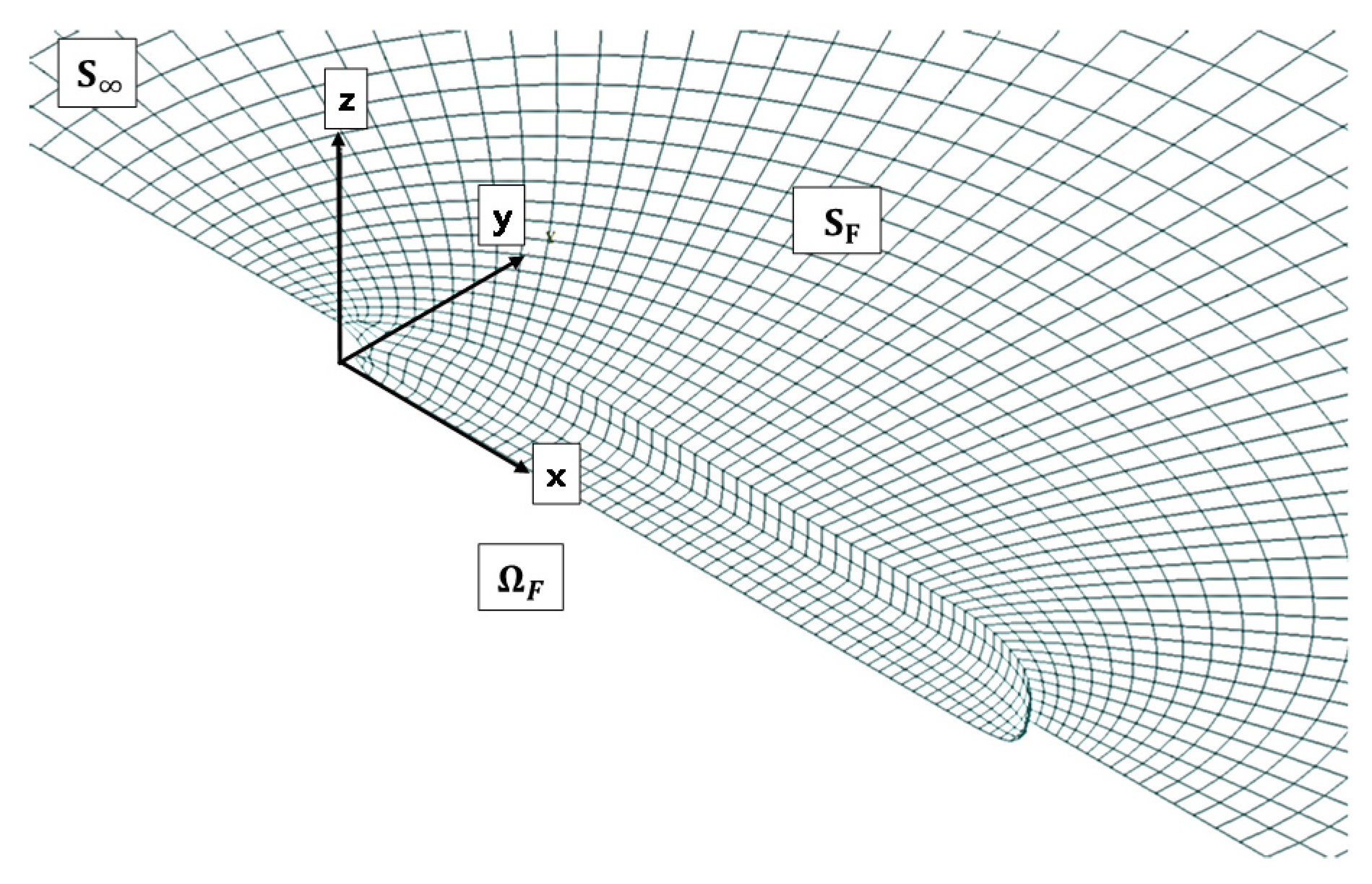
2.1. Hydrodynamic Model
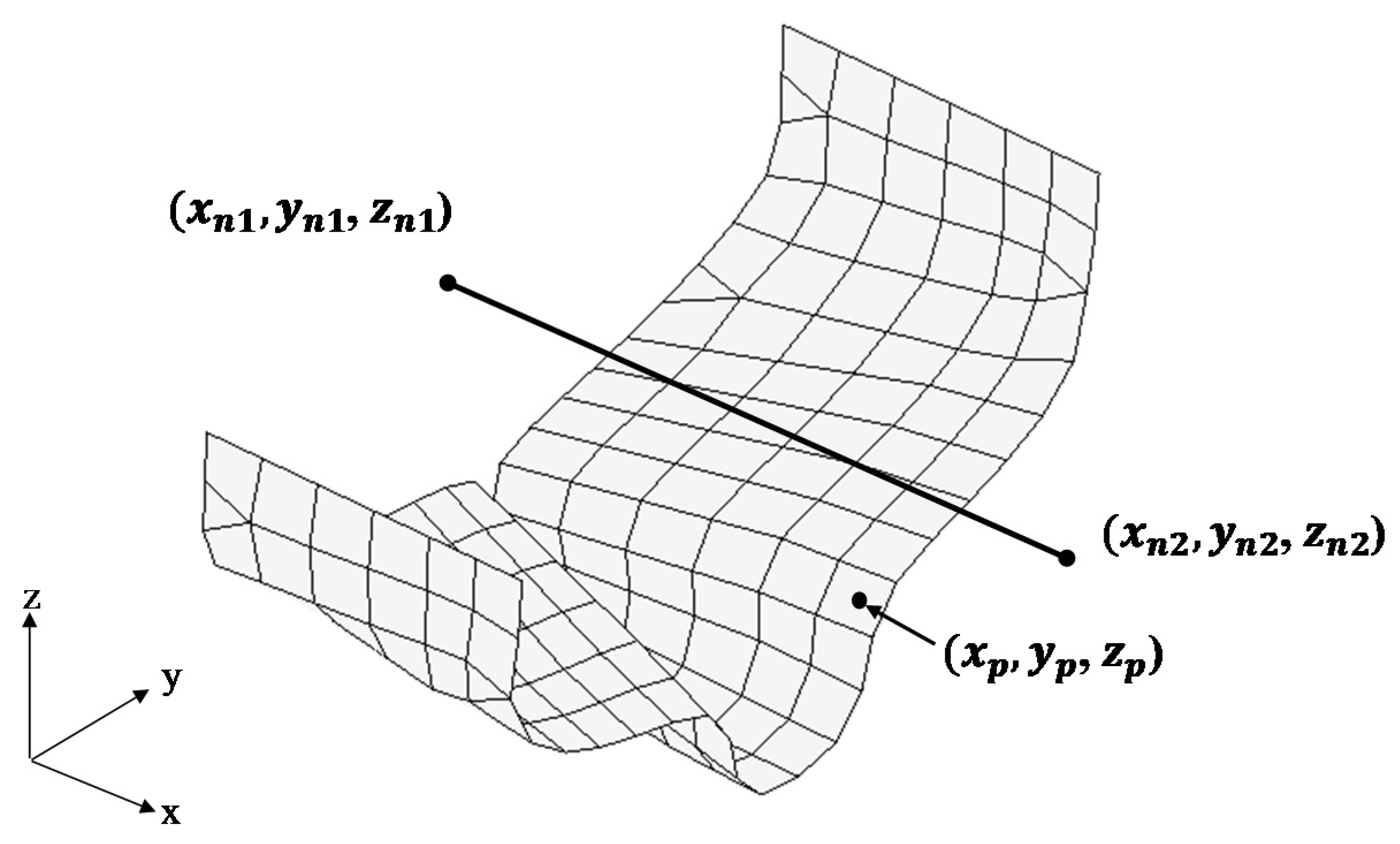
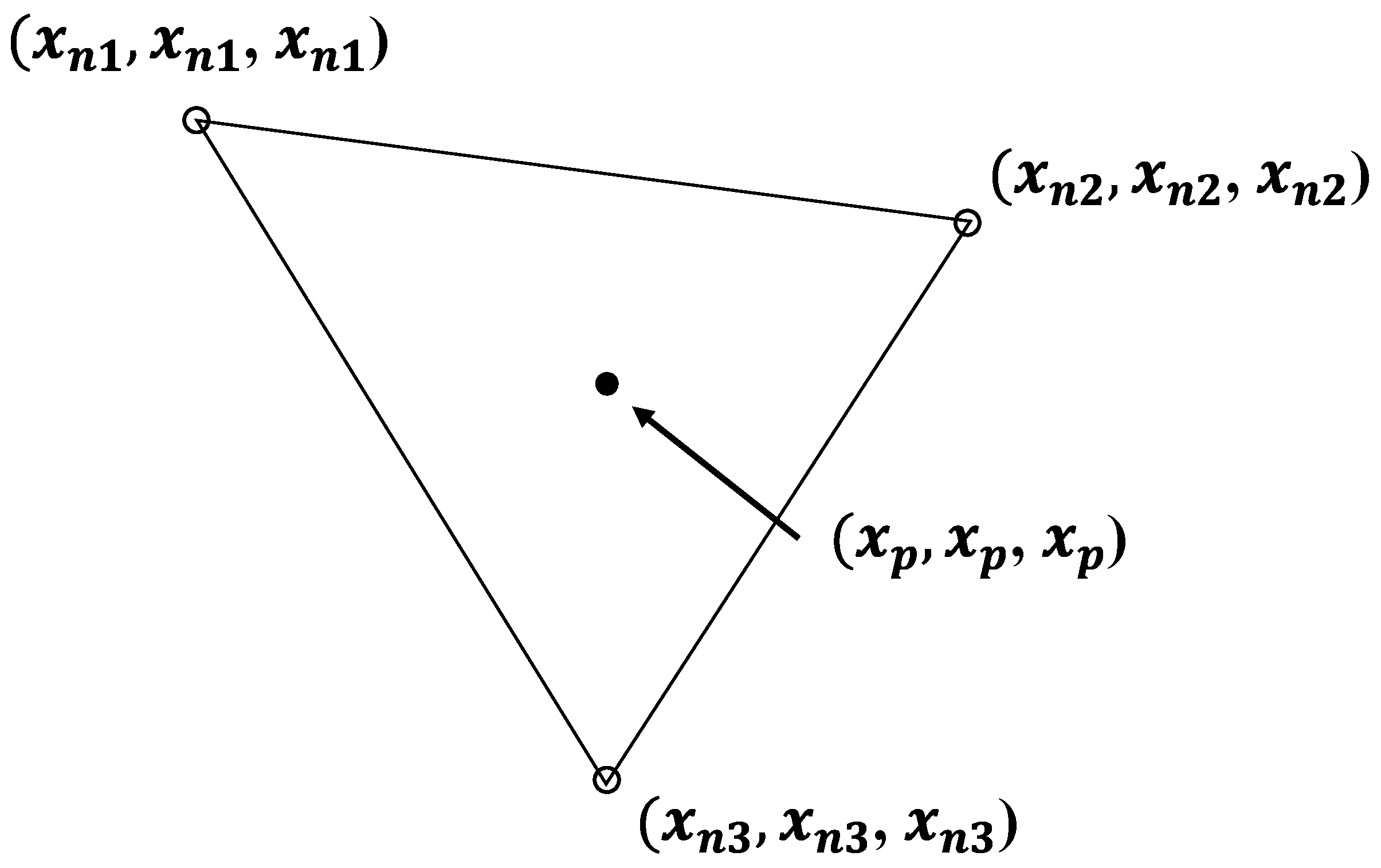
2.2. Fluid–Structure Parameter Exchange
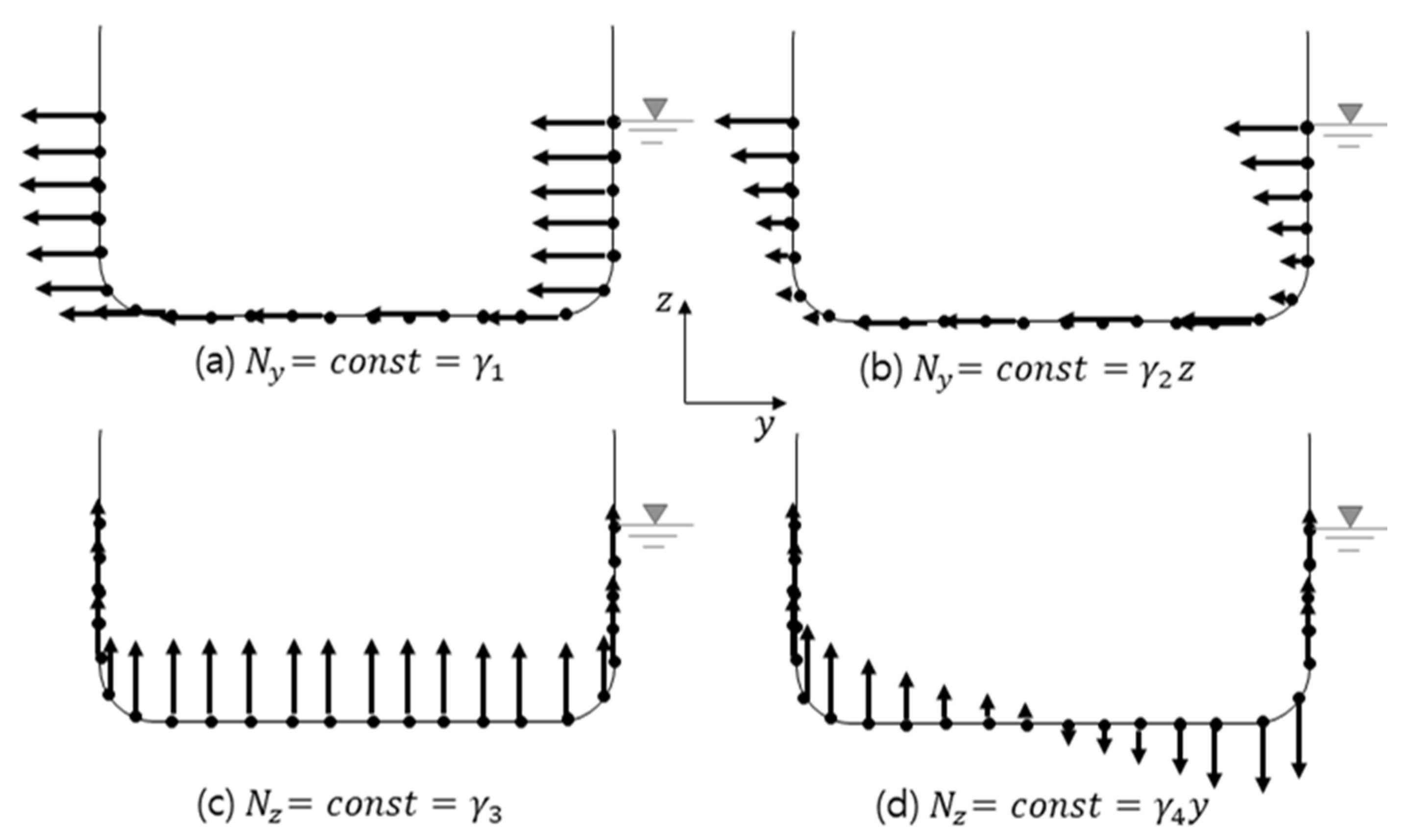
2.3. Stress Calculation from Hull Girder Loads
- (a)
- The load in the transverse direction acts uniformly on each node;
- (b)
- The load in the transverse direction changes linearly in the vertical direction;
- (c)
- The load in the vertical direction is applied evenly;
- (d)
- The load in the vertical direction changes linearly in the transverse direction.
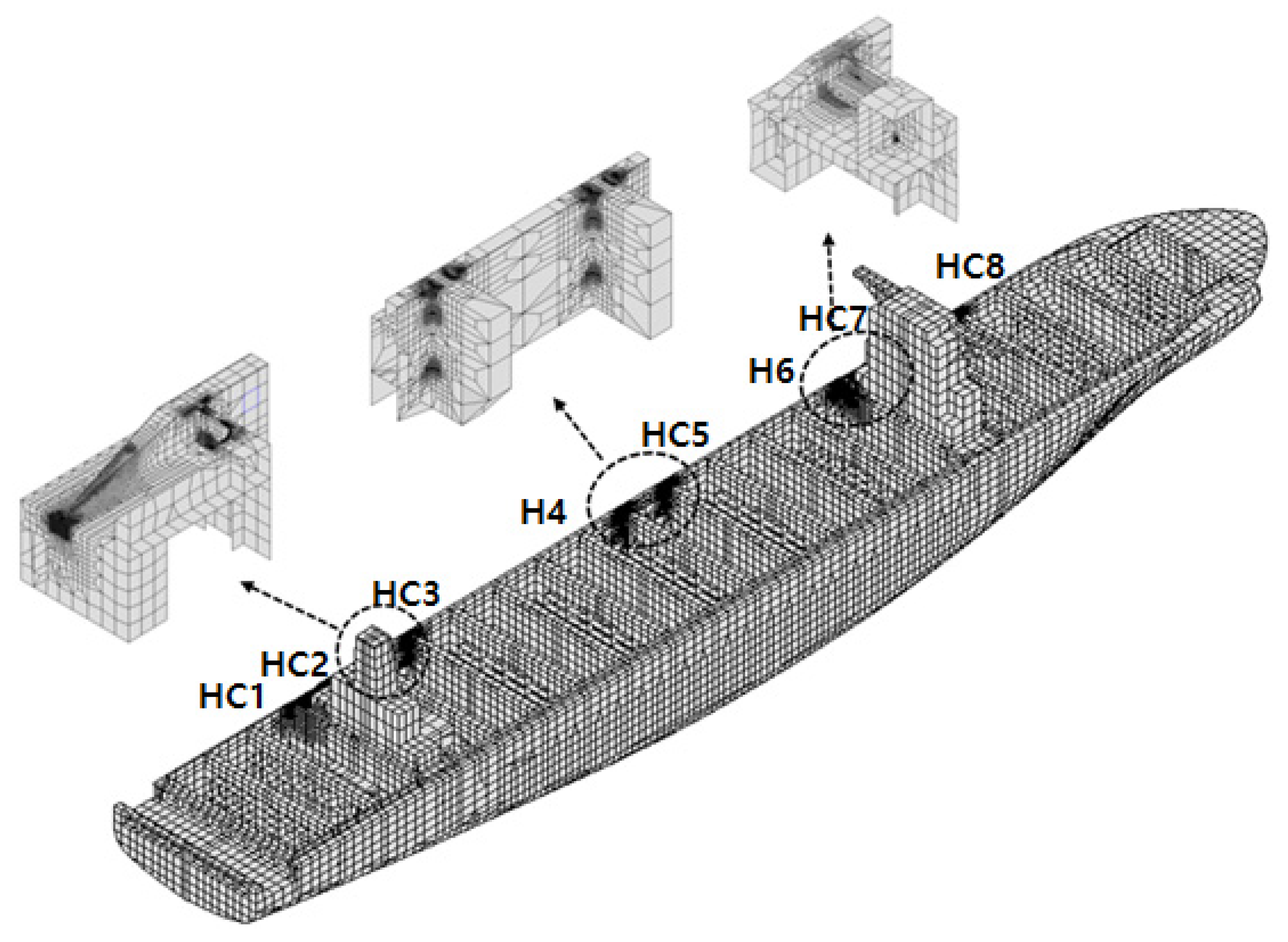
3. Structural Models
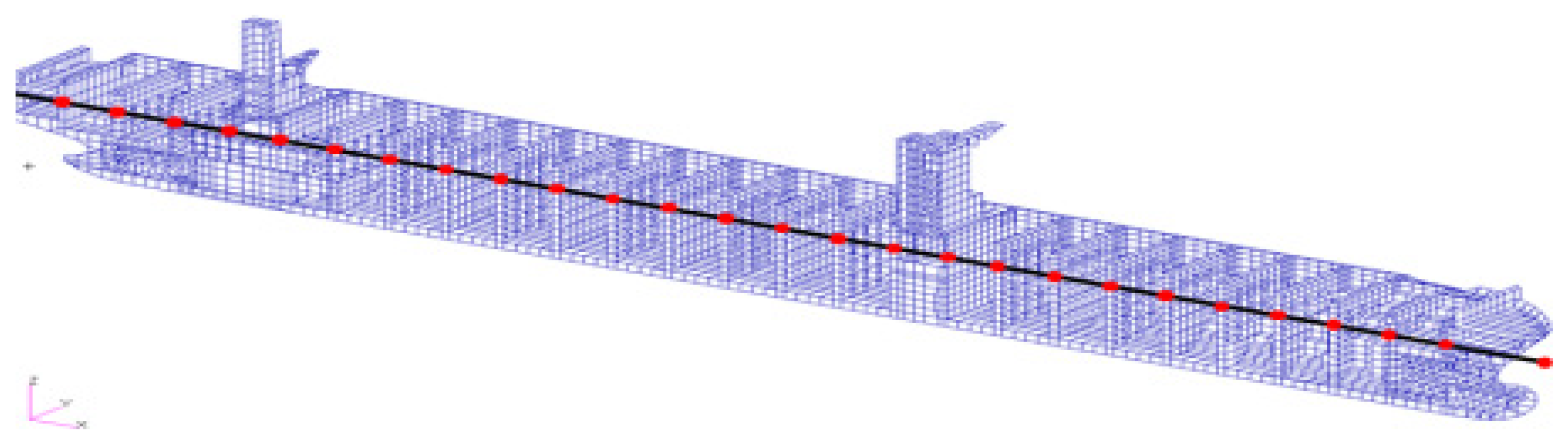
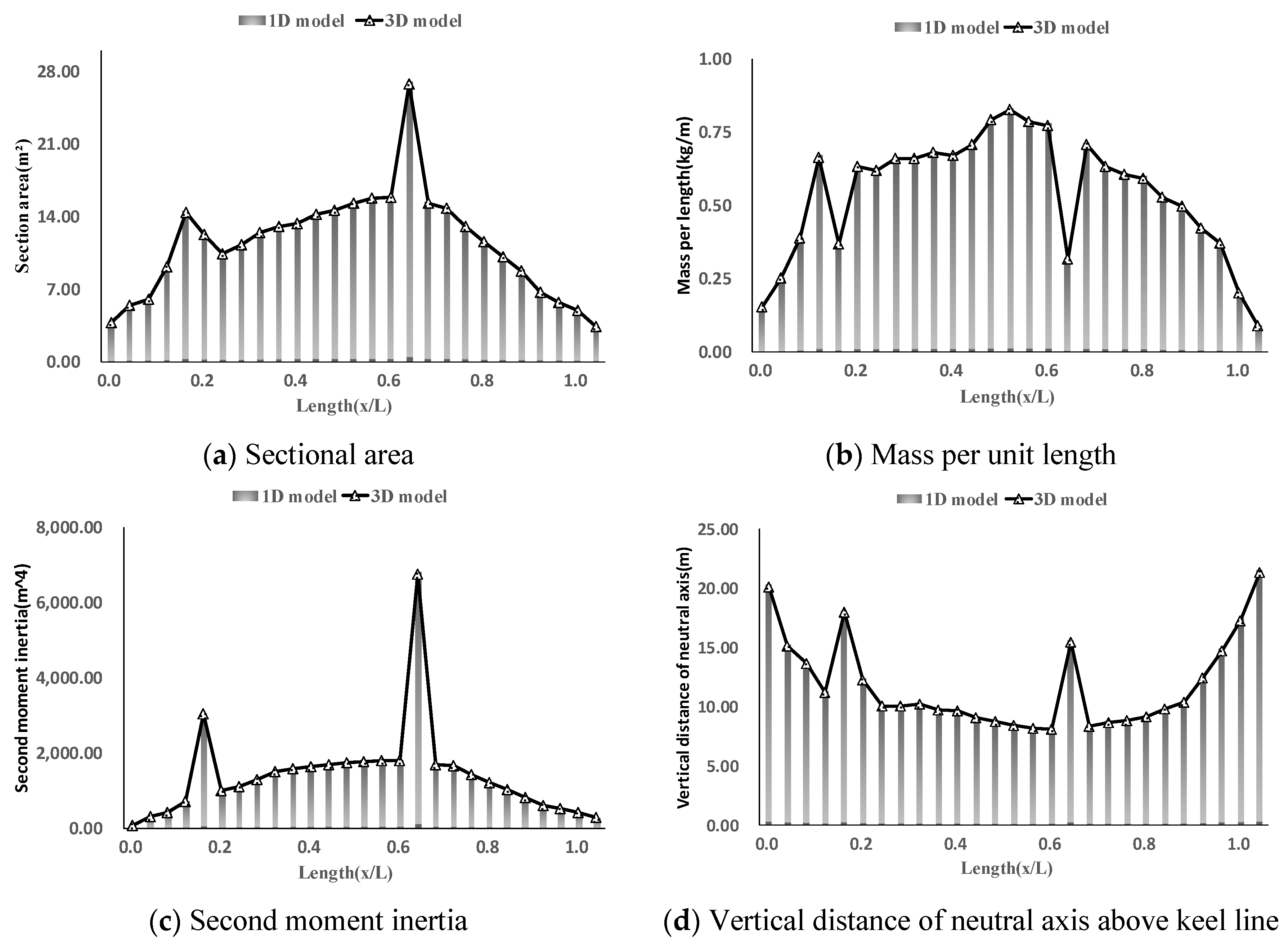
3.1. 1D Beam Model
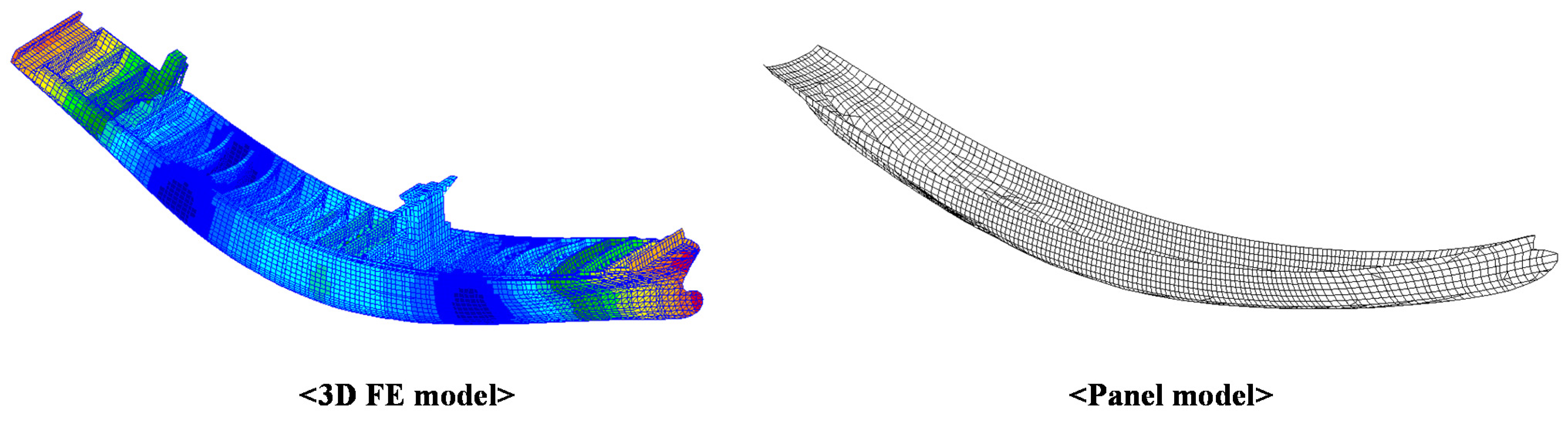
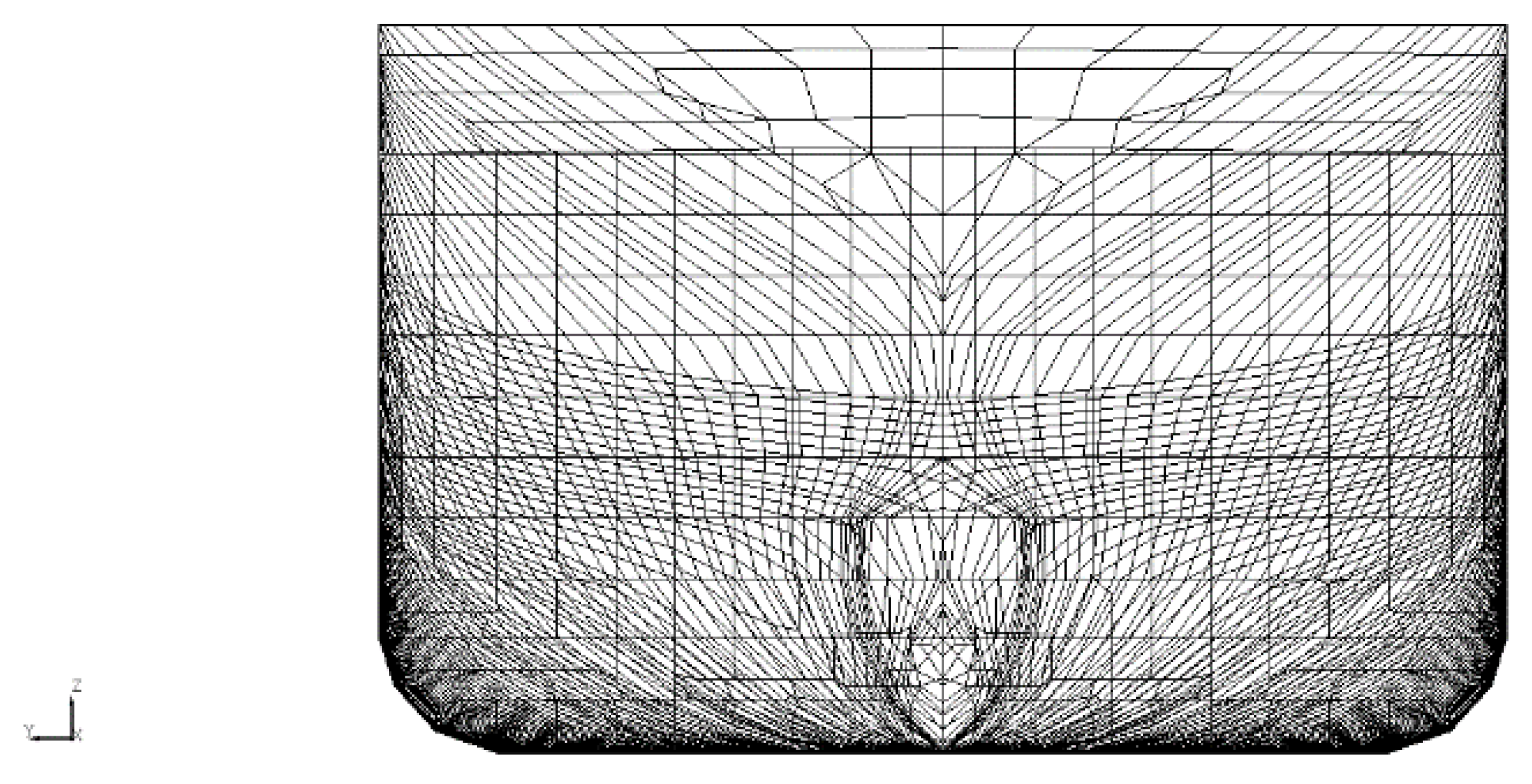
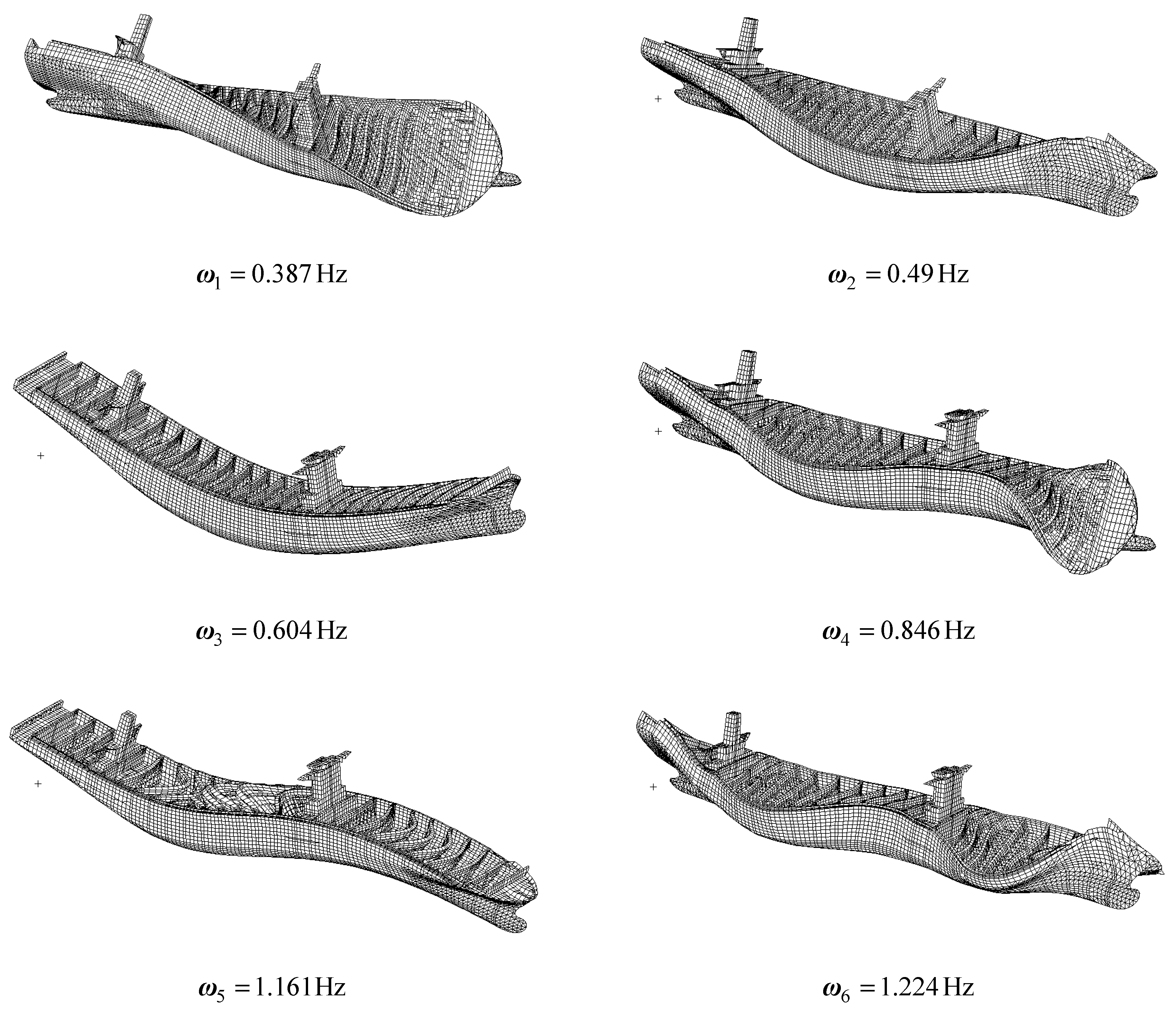
3.2. 3D Global Model
4. Analysis Results
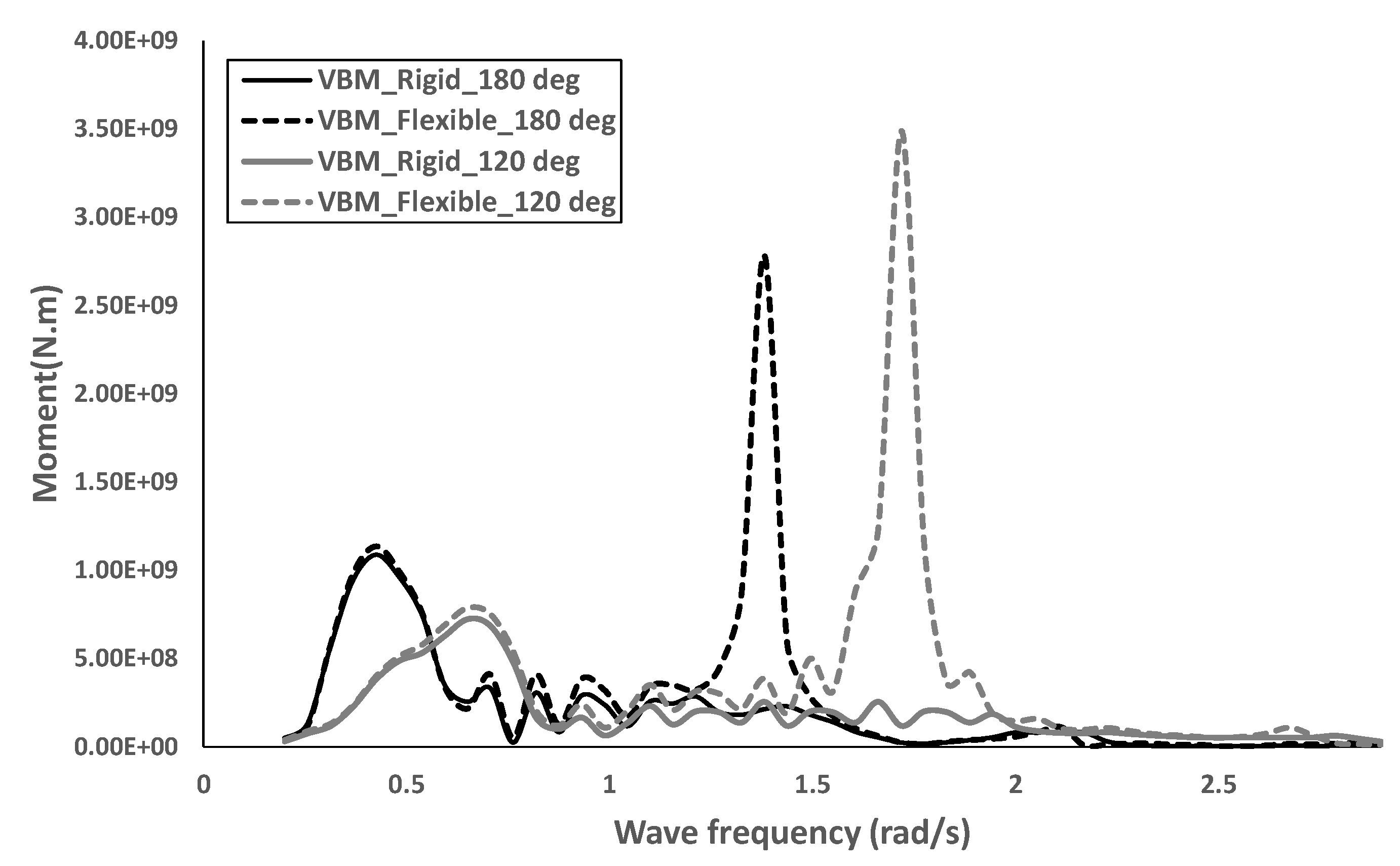
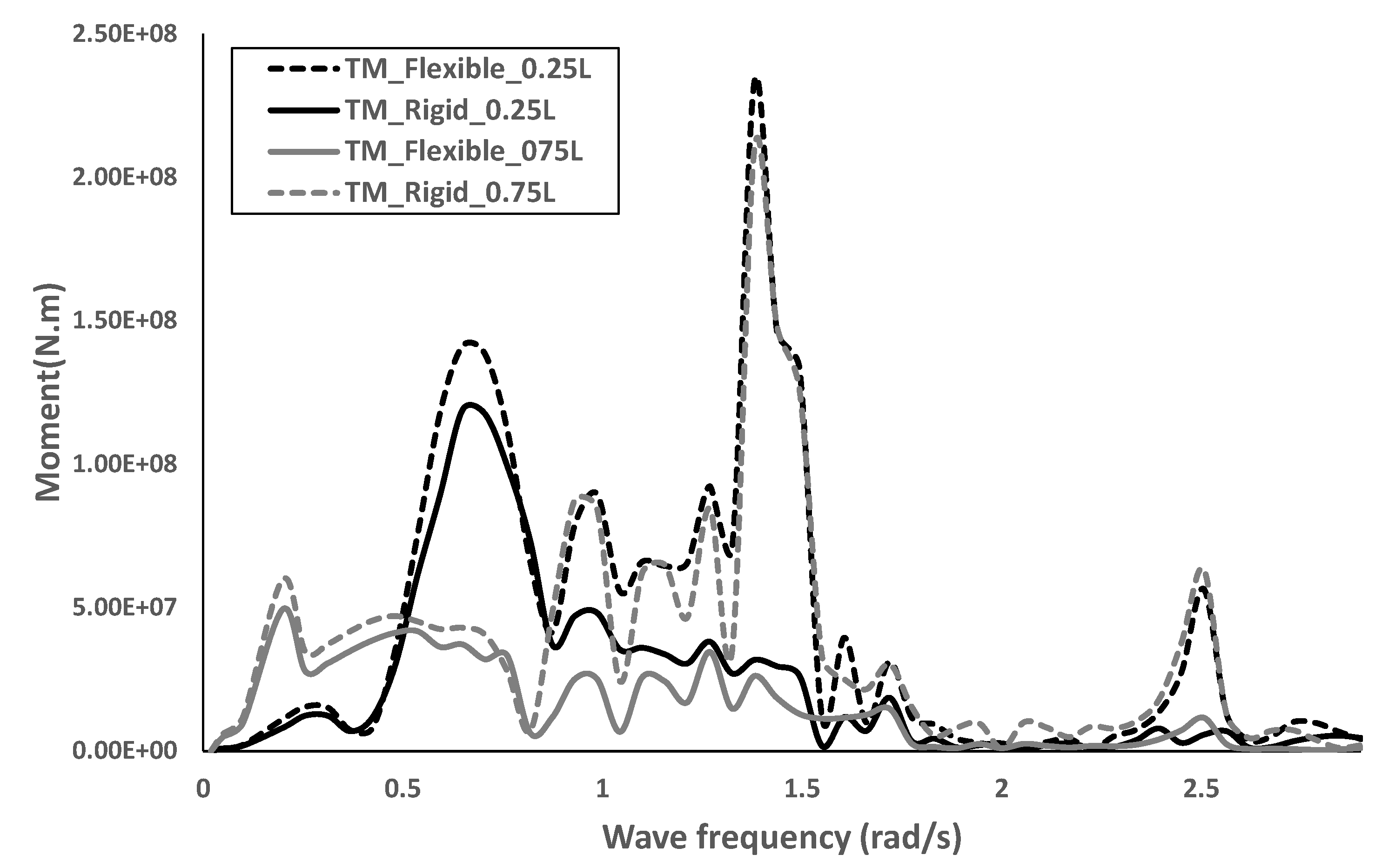
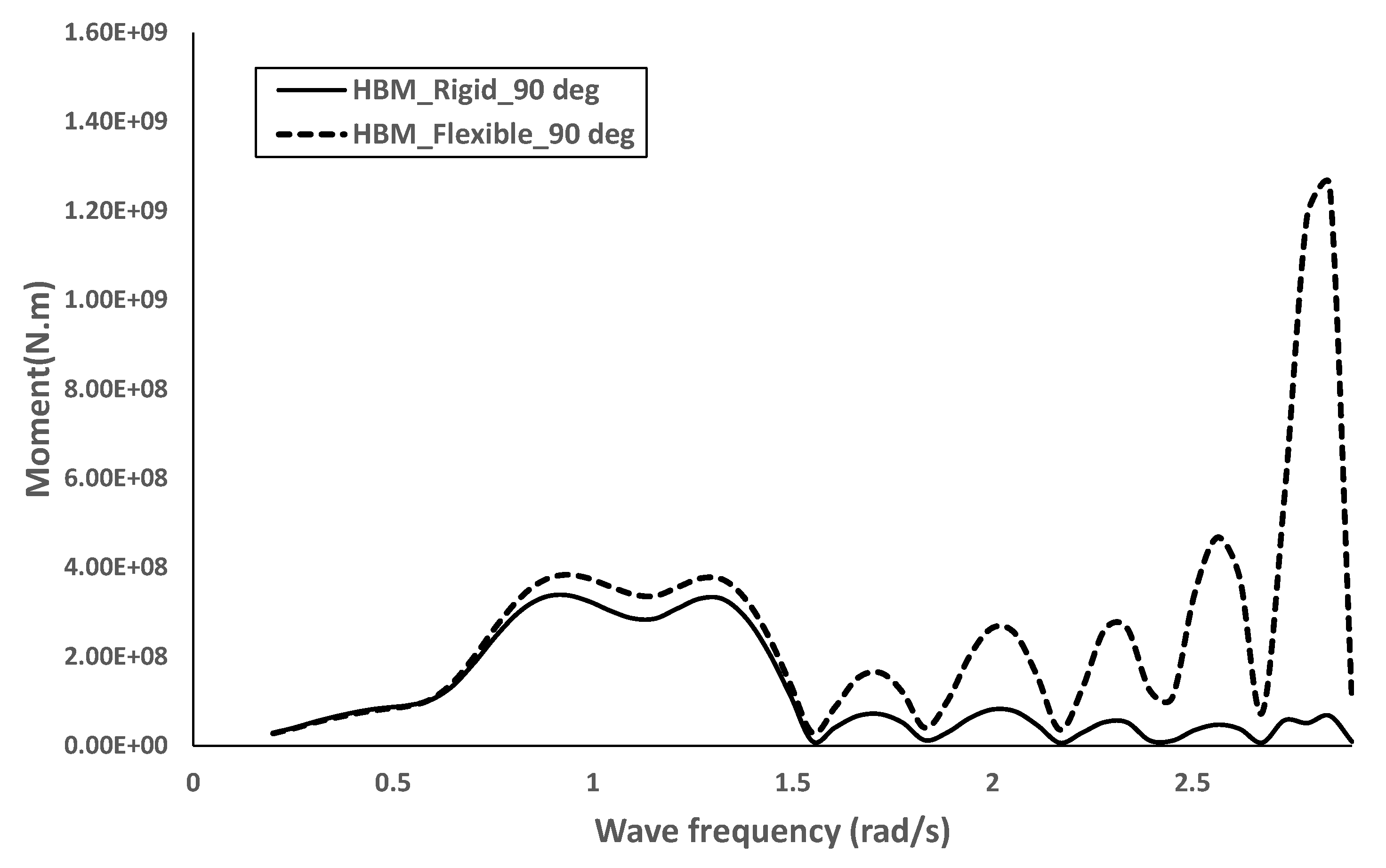
4.1. Load Transfer Functions
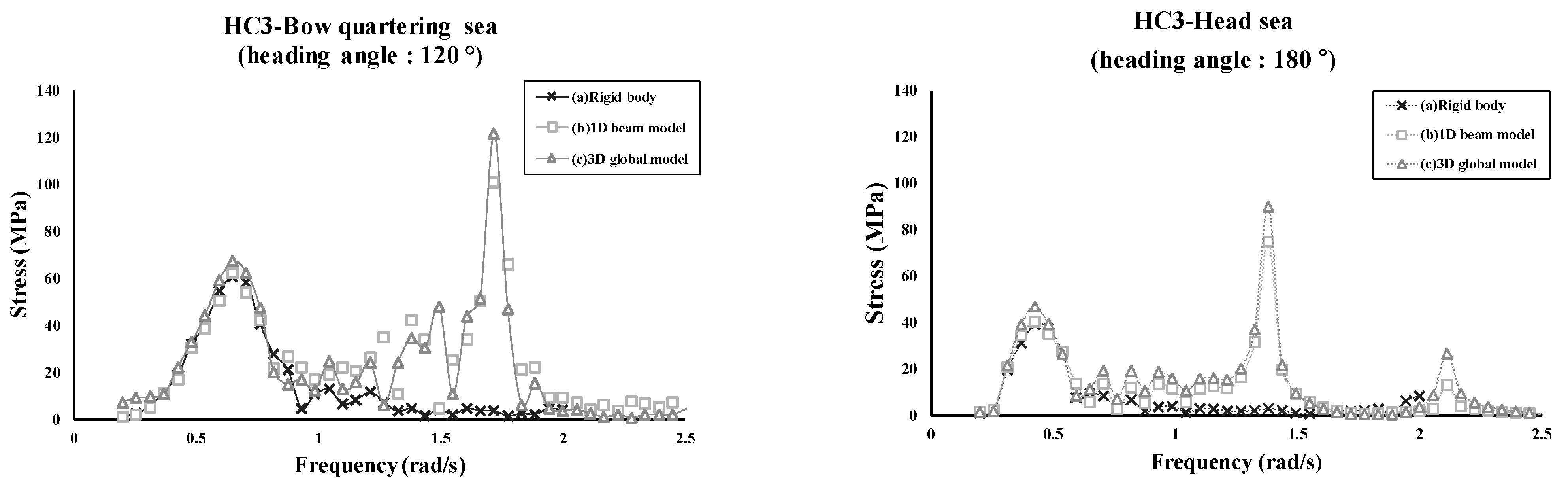
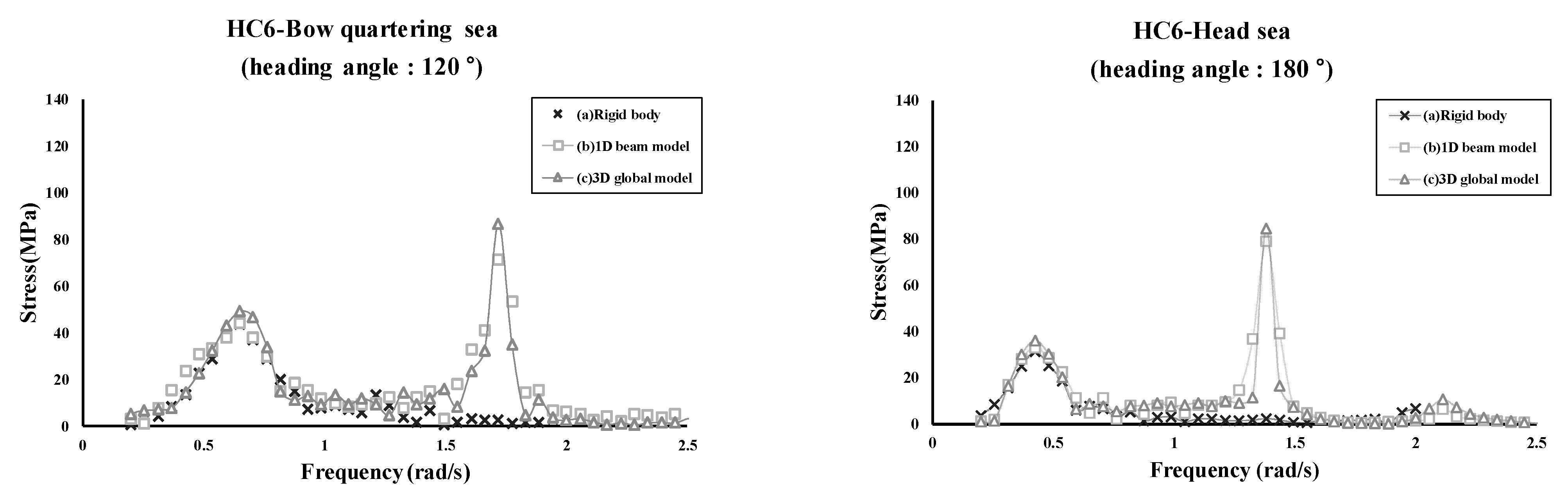
4.2. Stress Transfer Function
- (a)
- Rigid body: The stress response calculated by applying only low-order modes (from first mode to sixth mode) of the eigenvector (currently used in the final design stage);
- (b)
- 1D beam model: The stress response calculated by applying the theory of stress calculation from Section 2.3 using the hull girder loads (fluid–structure interaction analysis was carried out and used to calculate the stress response using hull girder moments such as VBM, HBM, and TM);
- (c)
- 3D global model: The stress response calculated by applying the theory of hydroelastic analysis from Section 2.2 (fluid–structure interaction analysis was carried out and used to directly calculate the stress response at the hot spots).
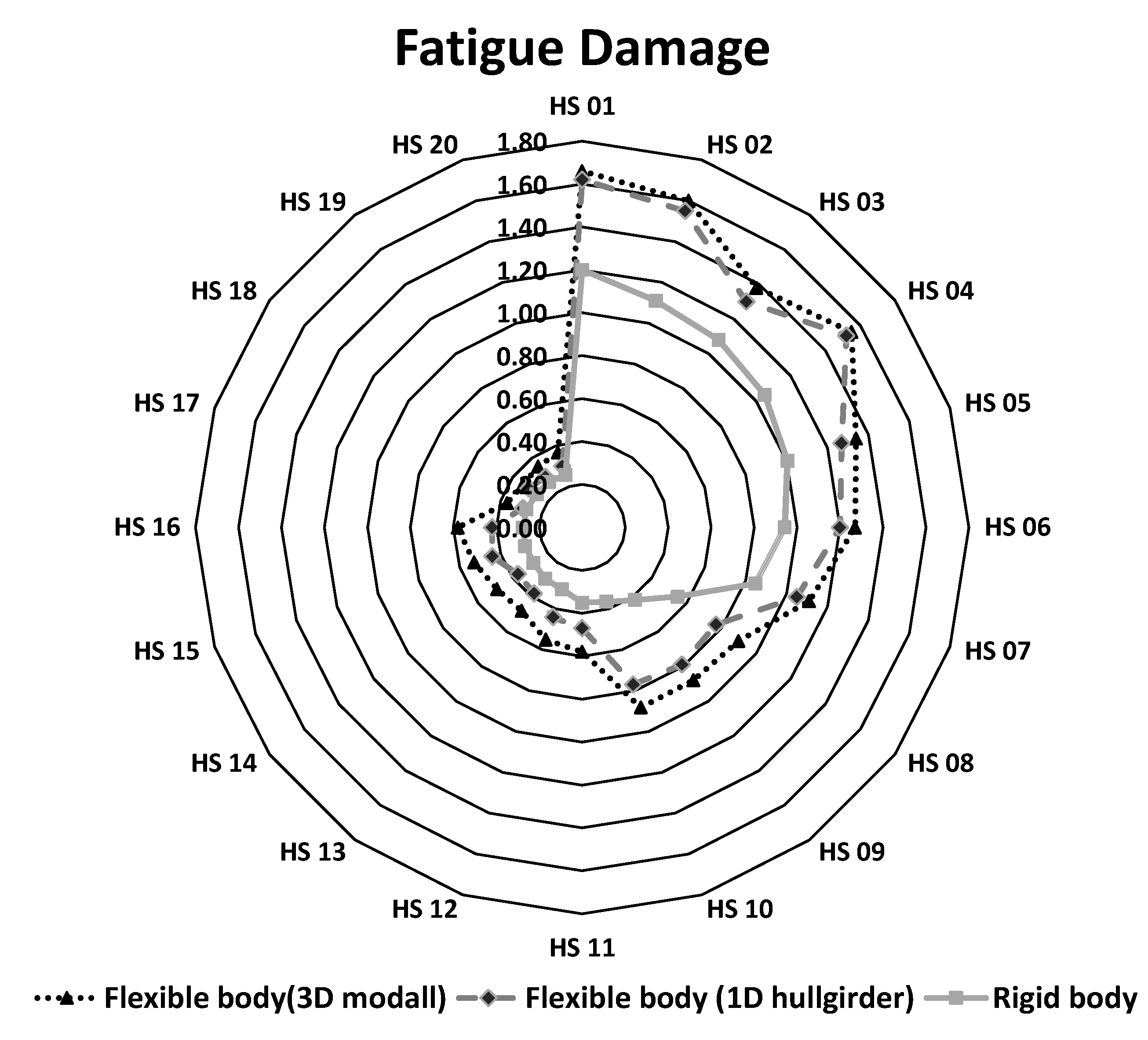
4.3. Fatigue Damage
5. Conclusions
- ν
- The fatigue damage of the upper deck hatch corner where the internal and external loads do not act can be estimated using only the hull girder loads (VBM, HBM, TM) calculated from the 1D beam model.
- ν
- In particular, the location of the hot spot where the fatigue damage is the greatest in a very large container ship has almost the same stress transfer function calculated from the 1D beam and the 3D global model.
- ν
- When estimating the fatigue damage by considering the linear springing component, the fatigue damage is increased by 30–100% compared to the rigid body response-based value used in the design stage, and these are caused by the response increase at low frequencies due to waves, as well as by high-frequency responses, such as the springing response.
- ν
- In the case of calculating only hull girder loads based on the hydroelastic model at the actual design stage, the fatigue damage at hot spot locations can be estimated using the proposed method.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bishop, R.; Price, W.; Zhang, X.-C. A note on the dynamical behaviour of uniform beams having open channel section. J. Sound Vib. 1985, 99, 155–167. [Google Scholar] [CrossRef]
- Lee, H.Y.; Lim, C.G.; Jung, H.B. Hydroelastic responses for a ship advancing in waves. J. Nav. Archit. 2003, 40, 16–21. [Google Scholar]
- Storhaug, G.; Moe, E.; Portella, R.B.; Neto, T.G.; Alves, N.L.C.; Park, S.G.; Lee, D.-K.; Kim, Y. First ocean going ships with springing and whipping included in the ship design. In Proceedings of the ASME 2011 30th International Conference on Ocean, Offshore and Artic Engineering, Rotterdam, The Netherlands, 19–24 June 2011. [Google Scholar] [CrossRef]
- Malenica, Š.; Senjanović, I.; Vladimir, N. Hydro structural issues in the design of Ultra Large Container Ships. Brodogradnja 2013, 64, 323–347. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.; Kim, K.-H.; Kim, Y. Time domain springing analysis on a floating barge under oblique wave. J. Mar. Sci. Technol. 2009, 14, 451–468. [Google Scholar] [CrossRef]
- Senjanović, I.; Hadžić, N.; Cho, D.S. Influence of Different Restoring Stiffness Formulations on Hydroelastic Response of Large Container Ships. Brodogradnja 2013, 64, 279–304. [Google Scholar]
- Senjanović, I.; Vladimir, N.; Tomić, M.; Hadžić, N.; Malenica, Š. Global hydroelastic analysis of ultra large container ships by improved beam structural model. Int. J. Nav. Arch. Ocean Eng. 2014, 6, 1041–1063. [Google Scholar] [CrossRef]
- Jung, B.-H.; Ahn, I.-G.; Seo, S.-K.; Kim, B.-I. Fatigue Assessment of Very Large Container Ships Considering Springing Effect Based on Stochastic Approach. J. Ocean Eng. Technol. 2020, 34, 120–127. [Google Scholar] [CrossRef]
- Kim, J.-H.; Kim, Y. Numerical analysis on springing and whipping using fully-coupled FSI models. Ocean Eng. 2014, 91, 28–50. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.-H.; Kim, Y. Numerical computation of motions and structural loads for large containership using 3D Rankine panel method. J. Mar. Sci. Appl. 2017, 16, 417–426. [Google Scholar] [CrossRef]
- Wang, S.; Soares, C.G. Hydroelastic analysis of a rectangular plate subjected to slamming loads. J. Mar. Sci. Appl. 2017, 16, 405–416. [Google Scholar] [CrossRef]
- Wang, S.; Soares, C.G. Review of ship slamming loads and responses. J. Mar. Sci. Appl. 2017, 16, 427–445. [Google Scholar] [CrossRef]
- Vidic-Perunovic, J.; Jensen, J.J. Non-linear springing excitation due to a bidirectional wave field. Mar. Struct. 2005, 18, 332–358. [Google Scholar] [CrossRef]
- Shao, Y.-L.; Faltinsen, O.M. A numerical study of the second-order wave excitation of ship springing by a higher-order boundary element method. Int. J. Nav. Arch. Ocean Eng. 2014, 6, 1000–1013. [Google Scholar] [CrossRef] [Green Version]
- Heo, K.; Kashiwagi, M. Numerical study on the second-order hydrodynamic force and response of an elastic body—In bichromatic waves. Ocean Eng. 2020, 217, 107870. [Google Scholar] [CrossRef]
- Adenya, C.A.; Ren, H.; Li, H.; Wang, D. Estimation of springing response for 550 000 DWT ore carrier. J. Mar. Sci. Appl. 2016, 15, 260–268. [Google Scholar] [CrossRef]
- Kim, B.; Choung, J. A study on prediction of whipping effect of very large container ship considering multiple sea states. Int. J. Nav. Arch. Ocean Eng. 2020, 12, 387–398. [Google Scholar] [CrossRef]
- WISH-FLEX Report. Development of Prediction Method for Ship Structural Hydro-Elasticity in Waves (Springing and Slam-Ming-Whipping); Seoul National University: Seoul, Korea, 2011.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Length overall, LoA | 347.0 |
| Length between perpendiculars, Lpp | 342.5 |
| Breadth, B | 48.2 |
| Depth, D | 29.8 |
| Design draught, Td | 14.5 |
| Displacement, | 168,658.0 |
| Longitudinal center of gravity, L.C.G (m) | 170.12 |
| Max. speed (knots) | 24.0 |
| Gyration radius in roll and pitch (m) | 17.10, 88.24 |
| 1D FE Model (Dry) | 3D FE Model (Dry) | Dry Mode Error (%) | 3D FE Model (Wet) | |
|---|---|---|---|---|
| VBM (Hz) | 0.604 | 0.614 | 1.8 | 0.471 |
| TM (Hz) | 0.387 | 0.362 | 6.6 | 0.352 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, S.-I.; Boo, S.-H.; Kim, B.-I. Application of Fatigue Damage Evaluation Considering Linear Hydroelastic Effects of Very Large Container Ships Using 1D and 3D Structural Models. Appl. Sci. 2021, 11, 3001. https://doi.org/10.3390/app11073001
Lee S-I, Boo S-H, Kim B-I. Application of Fatigue Damage Evaluation Considering Linear Hydroelastic Effects of Very Large Container Ships Using 1D and 3D Structural Models. Applied Sciences. 2021; 11(7):3001. https://doi.org/10.3390/app11073001
Chicago/Turabian StyleLee, Sang-Ick, Seung-Hwan Boo, and Beom-Il Kim. 2021. "Application of Fatigue Damage Evaluation Considering Linear Hydroelastic Effects of Very Large Container Ships Using 1D and 3D Structural Models" Applied Sciences 11, no. 7: 3001. https://doi.org/10.3390/app11073001