1. Introduction
Humans always seek to be more engaged with their surroundings to have fun, make social bonds, or gain knowledge. Therefore, different kinds of interface mediums have been developed throughout time to provide the sense of connectivity with different immersive levels [
1]. Humans spend most of their time inside indoor spaces (e.g., homes, offices, schools, and cultural and entertainment facilities); therefore, creating interaction channels inside these places is essential.
Nowadays, we find interactive screens in shopping malls for visitors’ guidance [
2]. Limiting the interactive experience to a fixed dimension screen could be helpful in a static environment, but it does not meet the dynamic environment requirement that demands interactions in different places. In [
3], better utilization of indoor spaces to create more immersive interaction experiences was proposed utilizing spatial augmented reality (SAR), where projection technology was used for SAR applications to render augmented images over real-world surfaces. A commercially available example of a SAR system is ceiling-mounted projectors, which support interactions with projected screens used in schools and companies. This category of interactive projectors needs a special setup to guarantee precise calibration and works by tracking the user’s hand movements [
4,
5].
Even though using a single and fixed projector enables larger interactive surfaces, researchers have tried to enlarge the interactive envelope by proposing greater mobility in the projector unit. Everywhere Display [
6] and similar developed techniques [
7,
8] proposed a steerable augmented reality platform to map augmented screens over different surfaces in a room-scale area. Image-based techniques are common among these platforms to detect a user’s position or limbs and enable interaction with augmented graphics. Even image-based techniques are one of the most accurate tracking systems; however, it limits users’ freedom in positioning themselves relative to the augmented screen. Thus, the interactive experience is bound by a fixed area in which users must stand to keep a clear line-of-sight with the camera view. This study [
8] proposed a technique to use a second Kinect camera to resolve this problem, but still, the user could not move freely because of the physical limitation of the camera field of view (FOV). Moreover, the user could not perform interactions beyond the system’s physical setup.
Where to project is another issue. Researchers in [
7] designed augmented graphics to be mapped over a human’s body and to be updated in real-time during their movement. Consequently, in [
9], the augmented screens were mapped on the floor based on the interaction progress for single or multiple users as an informative system that helps the user explore effectively augmented surroundings. MeetAlive [
10] presents an omni-directional display system considered adequate for a face-to-face meeting in a room, where the user could define the location of the augmented screen to any surface in the room for a more effective display. Some methods limit the users’ ability to choose where to project according to the display context, where others propose to vary the display content and limit the ability to dynamically change the augmented screen’s location (position and size). Not only where to project is important but also designing the projected content is crucial for AR applications. To boost the projected content’s impact, thoughtful design for the projected items plays an essential role in influencing the users’ cognition ability and, accordingly, their visual information’s interpretation and perception [
11]. The variation of the spatial cognitive skills between users was found to change the gained benefit from an AR application’s content [
12], which implies the importance of carefully designing each item within the projected content.
Interactive technology can be seen in modern museum exhibitions [
13,
14], where SAR is used widely with different implementation technologies [
15,
16]. Considering that a museum environment contains several exhibition halls where interactive content needs to be displayed in different locations, using many fixed or steerable projection-based AR could be a good solution. However, it is costly and requires effort for precise setup and calibration. The nature of the cyclic change of in-show content in each exhibition hall may require a continuous displacement of interactive equipment. Therefore, increasing the projector unit mobility may be a suitable solution utilizing only a single project to surpass the room-scale limit. Mobile interactive projection augmentation may be effective for a dynamic and varying-scale interactive environment. An example of using mobile projection indoors is shown in [
17] to map accurate images on 3D objects.
In our study, we chose the ultra-wideband (UWB) wireless network to locate objects in 3D with a moderate tracking accuracy as long as these objects are present inside the tracking envelope. This tracking network provides greater freedom for users to move and perform interaction within the tracking envelope and not restrict their movement to a specific area. Besides, the UWB wireless network governs the mobile projector platform’s navigation and widens the interaction area by converting passive indoor surfaces to interactive ones. Following this strategy results in a comprehensive interactive environment within a single room and allows the interaction to be designed in a symmetric way outside room boundaries. We name the described mobile projector platform as a UWB-driven self-actuated projector (USAP). It supports a mobile augmented screen in any position according to the user’s desire. The user could define the interactive window and start interacting with the augmented screen using a hand-held input device. We designed the USAP as an information provider platform, where displayed content changes according to the detected position (e.g., defining hall number, surface ID, and USAP spatial position). Therefore, it could be an effective assisting platform for people such as tour-guides or teachers to present interactive, informative content to an audience or group of students for relatively large-scale indoor spaces.
This study aims to enhance interaction capabilities within a single room and suggest a scheme that can enlarge the interactive area beyond the room-scale systematically using a commercial-of-the-self, cheap, and portable technology to meet the need of large-scale interactive areas. Additionally, we seek to give the user more freedom to use any position to perform interactions without limiting movement. We also seek to support the user with a dynamic ability to define an augmented screen’s position and dimensions within any surface indoors, where a light-computational UWB-based calibration algorithm runs to localize the augmented screen.
To achieve our study goal, we conducted a study to answer the following research questions (RQs):
RQ1: How effectively deploying a UWB wireless sensor network help to convert passive surfaces into interactive ones for a dynamically change interactive indoor environment?
RQ2: How the deployment of a UWB network propose a solution to overcome limitations in conventional interactive spatial projection systems?
RQ3: What does system performance in terms of interaction accuracy, interaction time, workload, and system usability indicate about the system design and a user’s interaction experience?
To address these questions, we recruited 16 participants to experience our system in a laboratory-controlled environment to test the system’s different aspects. The analysis of the collected data alongside participant behavior observations led to the following contributions:
We developed an accurate, mobile, user-friendly, and expandable projection-based AR interactive system for indoor environments by deploying a UWB wireless sensor network and designing a UWB-driven self-actuated projector platform.
We designed a UWB-based, and light-computation calibration algorithm to enable interaction in any location with projected screens.
We designed a hand-held input device that allows the user to define the projection location and the size in any position indoors and that performs mid-air interaction functions such as pointing, triggering, dragging and dropping, and swiping.
This paper is organized as follows:
Section 2 describes related work.
Section 3 presents the UWB wireless sensor network ’s deployment to enable interaction over passive surfaces and demonstrates our USAP platform and input device design. The mathematical basis and structural data interaction management scheme are explained in
Section 4. The experiment design is found in
Section 5. Results are listed in
Section 6.
Section 7 presents the discussion and candidate system applications. Limitations and future work appear in
Section 8. A conclusion is provided in
Section 9.
4. Mathematical Basis and Interaction Management
This section explains the mathematics for estimating the boundaries of variable-size projected screens over different surfaces. Finding the projected screen boundaries helps to localize items within the projected screen and thus enable interaction. Our proposed system allows the user to customize the projected screen’s size and location, so the USAP platform navigates to meet the user’s display desires. The method used for projected screen calibration, the self-actuated projector navigation, and the mid-air user’s hand gesture detection performance are presented in this section. Finally, an interaction management scheme on how users perform interaction and how data handled in central and local servers are illustrated.
4.1. UWB-Based Calibration Algorithm and Interaction Detection
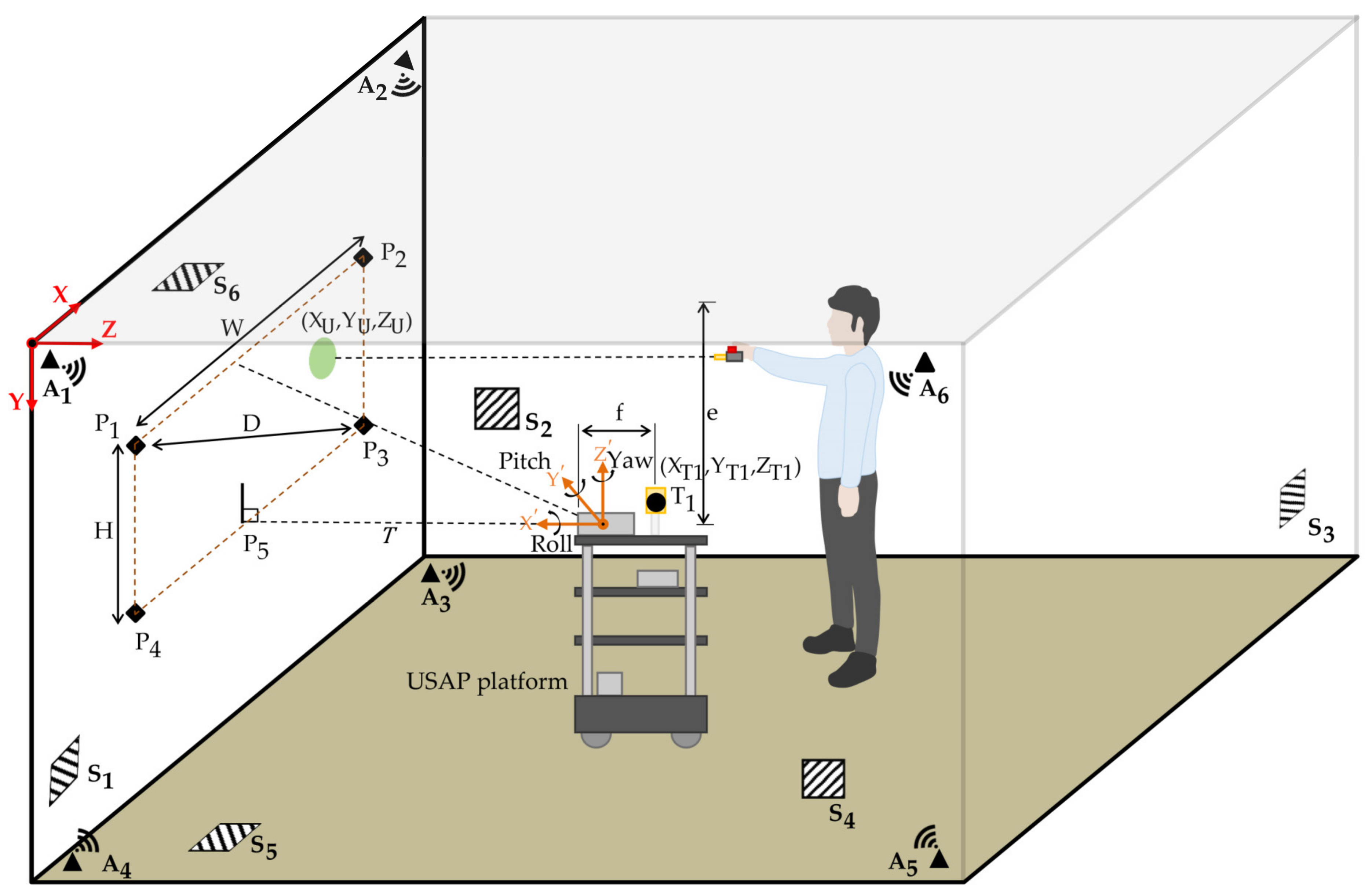
To estimate the projected screen boundaries, the USAP platform needs to be localized within the room by representing Tag 1 (T1) with position coordinates as (XT1, YT1, ZT1). Where defining the interactive surface ID tells about the USAP yaw angle around its local frame Z-axis.
Following the setup in
Figure 4, the projector beam source position is (X
T1, Y
T1, Z
T1–f), and the Y-axis coordinate for the projected screen points P
3, P
4, and P
5 equal to the vertical distance from the ceiling to the beam source, is (e), given that the throw beam offset is 100%. The throw distance (T) on the Z-axis from the USAP platform defining the diagonal distance of the projected screen (D) by using information given by the projector’s manual (
Table 2).
We use the curve fitting function to find the best polynomial representation for the relation between T and D, where c
0, c
1, c
2, and c
3 are coefficients of third order polynomial:
Using the projector aspect ratio 16:9 and from the projection geometry, we can write two equations as follows:
where W is the projected screen width, and H is its height. By updating the value of D based on the USAP position and solving (2) and (3), we could solve for W and H:
Projected screen boundaries can be defined by finding the coordinates of points P
1, P
2, P
3, and P
4:
When the user interacts with an augmented image, the user’s hand position can be represented as a pixel location in that image to define the interaction spot. Therefore, mapping each point inside the projected screen from UWB coordinate representation to pixel representation is the next step. If a user interacts with the projected screen at UWB coordinates of (XU, YU, ZU), the pixel location corresponding to the user’s touch is found by the following:
First, find the relative displacement of the user’s hand position from point P
1.
Second, map the displacement in each axis to find the corresponding pixel coordinates. Map the projected screen width (W) to the number of pixels in the X-axis direction (M) and the height (H) to the number of pixels in the Y-axis direction (N) (e.g., screen resolution is M × N = 1920 × 1080 pixels). Displacement in the X and Y directions can then be represented as the user’s hand position in pixels (X
M, Y
N).
These calculations can be repeated when interacting with S2, S3, and S4, considering the axes’ difference from one wall to another. When projecting on S5 or S6, the same governing equation controls the interaction except for the ability to vary the yaw angle for the USAP freely according to user’s desires.
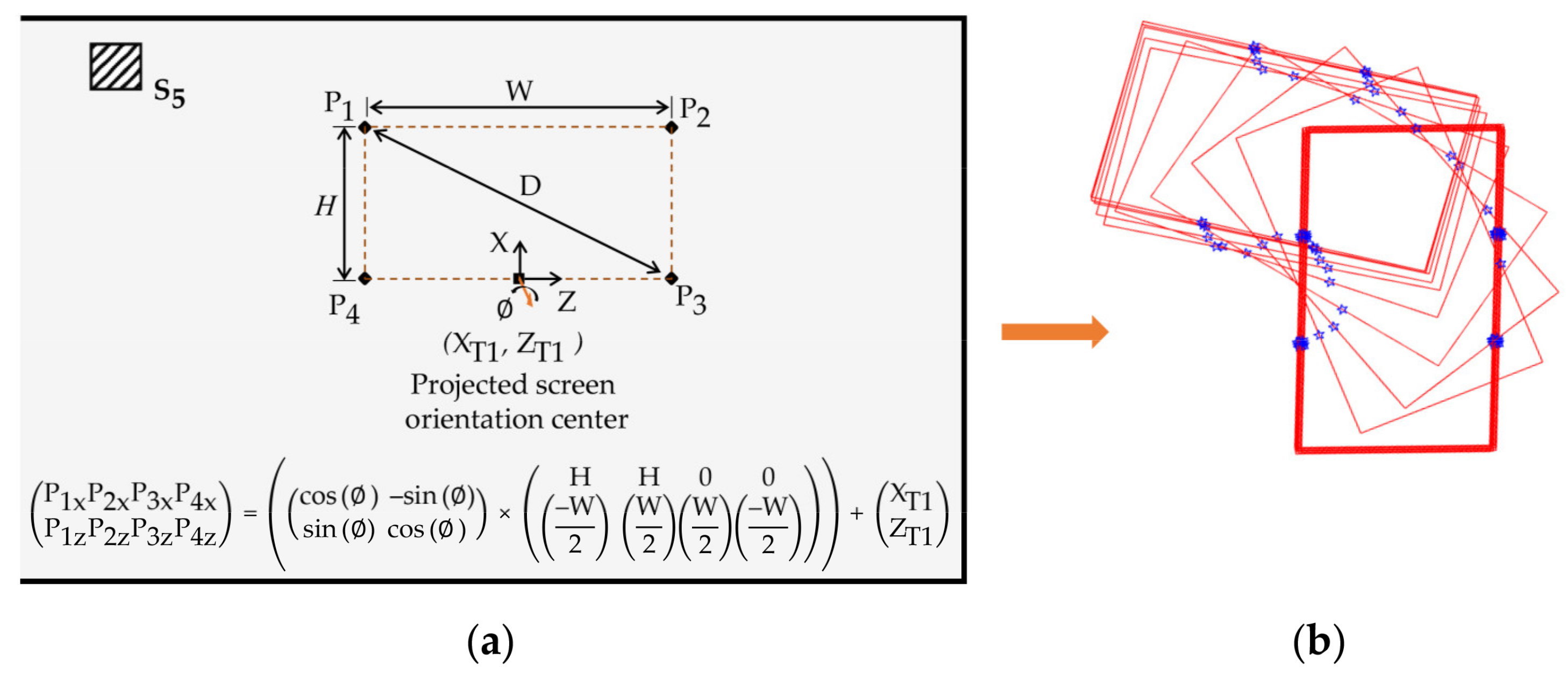
If the user seeks to interact with S
5, the orientation angle of the USAP platform around the local Z’-axis influences the location of the projected screen, so a 2D rotation matrix is applied to find the new boundaries for the projected screen (
Figure 5).
If the USAP platform is moving continuously between different surfaces and projecting visual contents, the user has the ability to interact directly at any location of the projection. Since the previously written equations can calibrate the display content dynamically for an indoor environment, we call it the UWB-based calibration algorithm.
4.2. Navigate the USAP Platform to Customize the Projected Screen
An important feature in our system is the ability of the user to customize the projected screen. Customizing means finding the proper location on the projection surface and defining the screen size. To illustrate the way it works, first, the user must activate the customization mood by double-clicking using the hand-held input device, where the duration between the two clicks must be less than 2 s. The user defines the projected screen location and size by selecting two diagonal points; however, the system must recognize the selected interaction surface throughout the user’s two designated points. Therefore, the corresponding coordinates of the two diagonal points are then compared (e.g., user input point1 = (XUI1, YUI1, ZUI1); user input point2 = (XUI2, YUI2, ZUI2)). We must then find the displacement in the X, Y, and Z-axes coordinates. For example, if the displacement in the X and Y axes is larger than the threshold1 value (e.g., threshold1 > 0.7 m) and displacement in the Z-axis is less than the threshold2 value (e.g., threshold2 < 0.3 m), then the user is assigning points on S1. Using this information, the USAP platform corrects its heading to this surface and inversely finds its desired spatial location using the user’s two input points, as follows:
A similar calculation is required if the user intends to perform interactions with a different wall in a different room; slight changes must be made for the axes’ change according to the interactive surface.
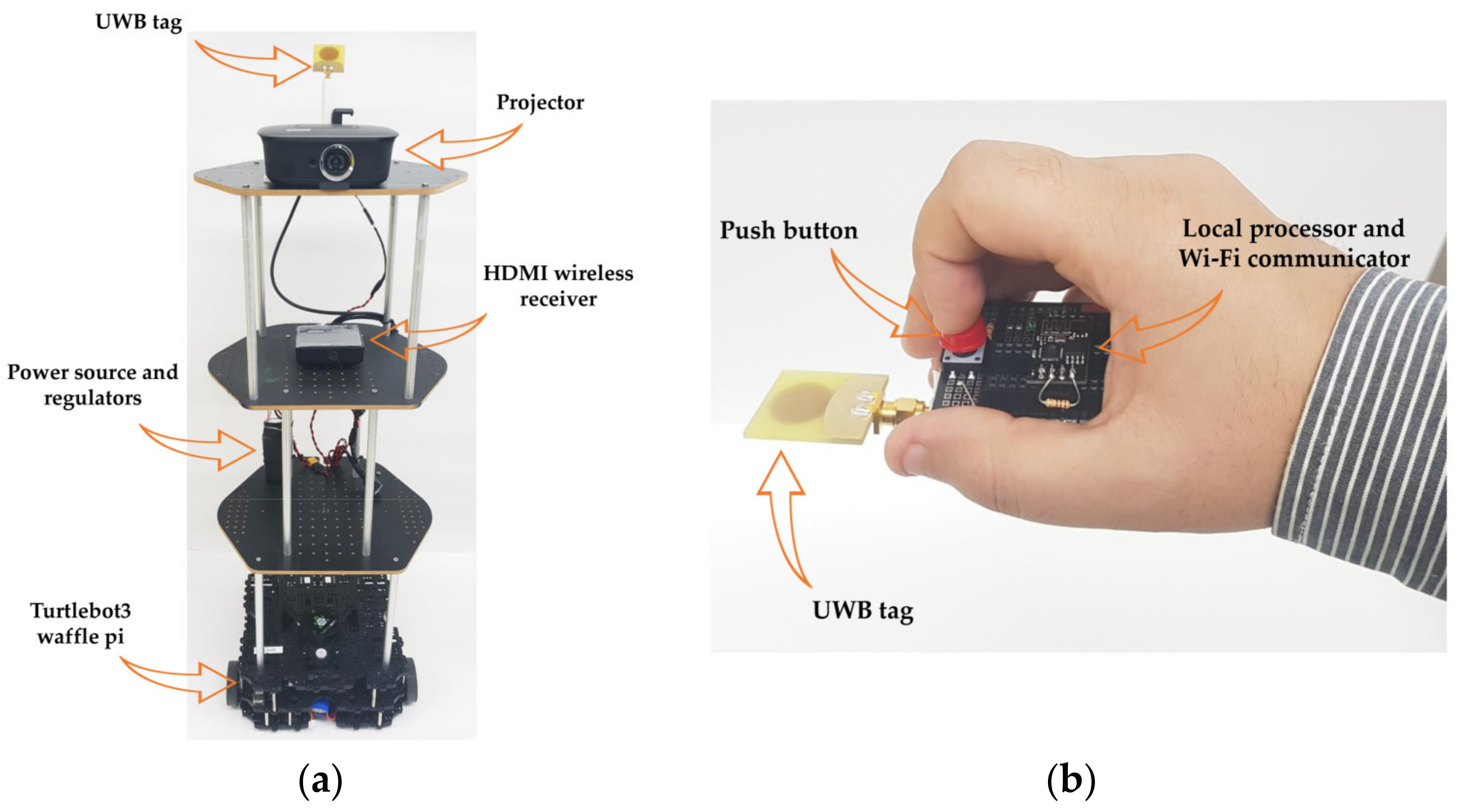
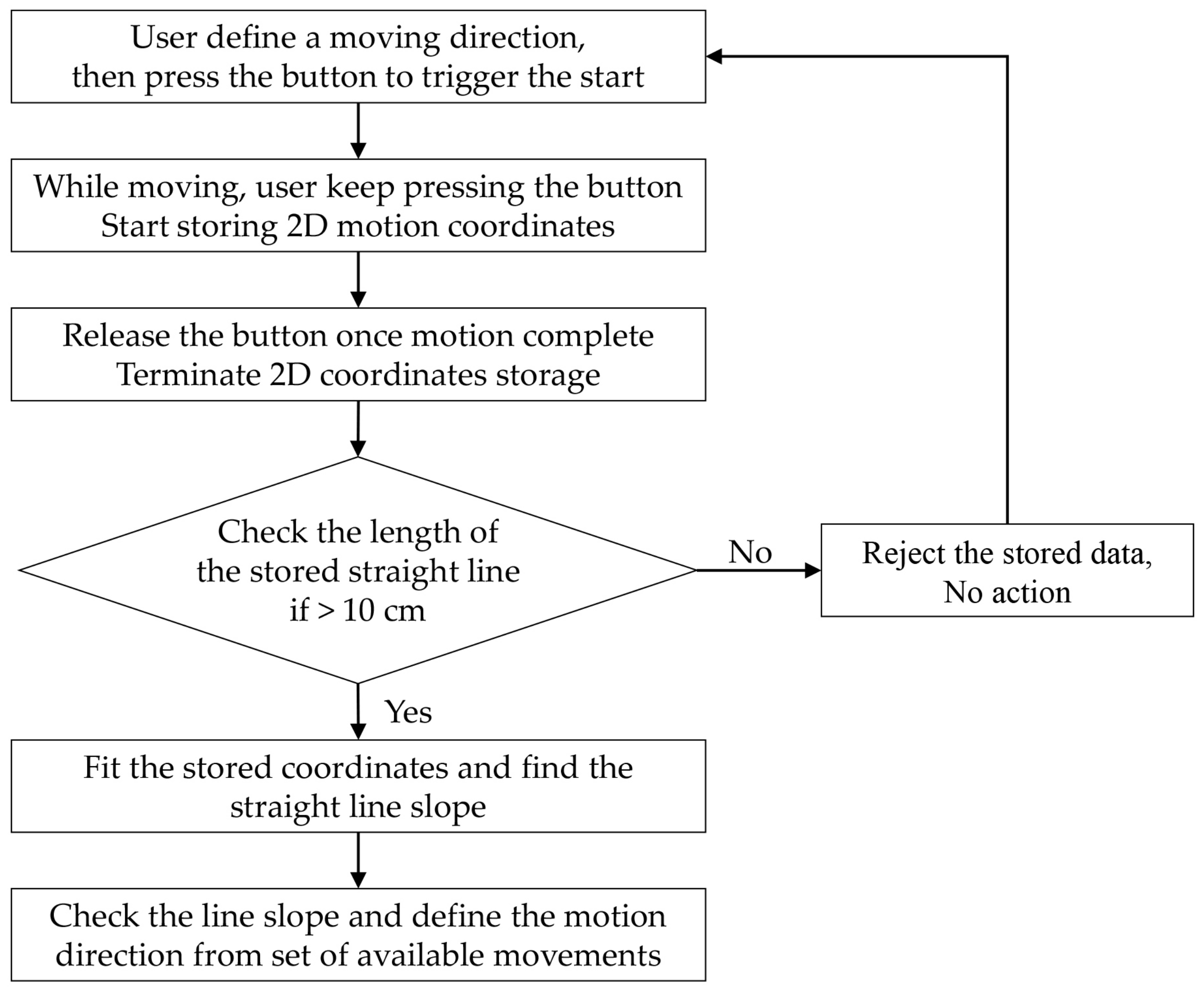
4.3. Algorithm of UWB Based Mid-Air Hand Gesture Detection
Finding the representation of the user’s hand position over the projected screen (
Section 4.2) supports functions like pointing, triggering, and dragging and dropping. Moreover, detecting simple hand gestures in the form of straight-line swipes can be achieved using our hand-held input device. Using the push button integrated into our input device, the user can click it to start, then move their hand in four different directions (right, left, up, and down), keeping their finger over the push button. Once the hand motion is complete, the user can release their finger from the push button. While the push button is being pressed, our system stores the 2D coordinates of the moving hand, and once the user releases the button, a fitting algorithm runs to determine the slope of the generated straight-line, which defines the motion pattern. To minimize the error created from UWB positioning accuracy, we discard the stored data when the separation between the start and end points is less than or equal 0.1 m (
Figure 6).
4.4. Interaction Management in UWB-Based Pervasive Computing Environment
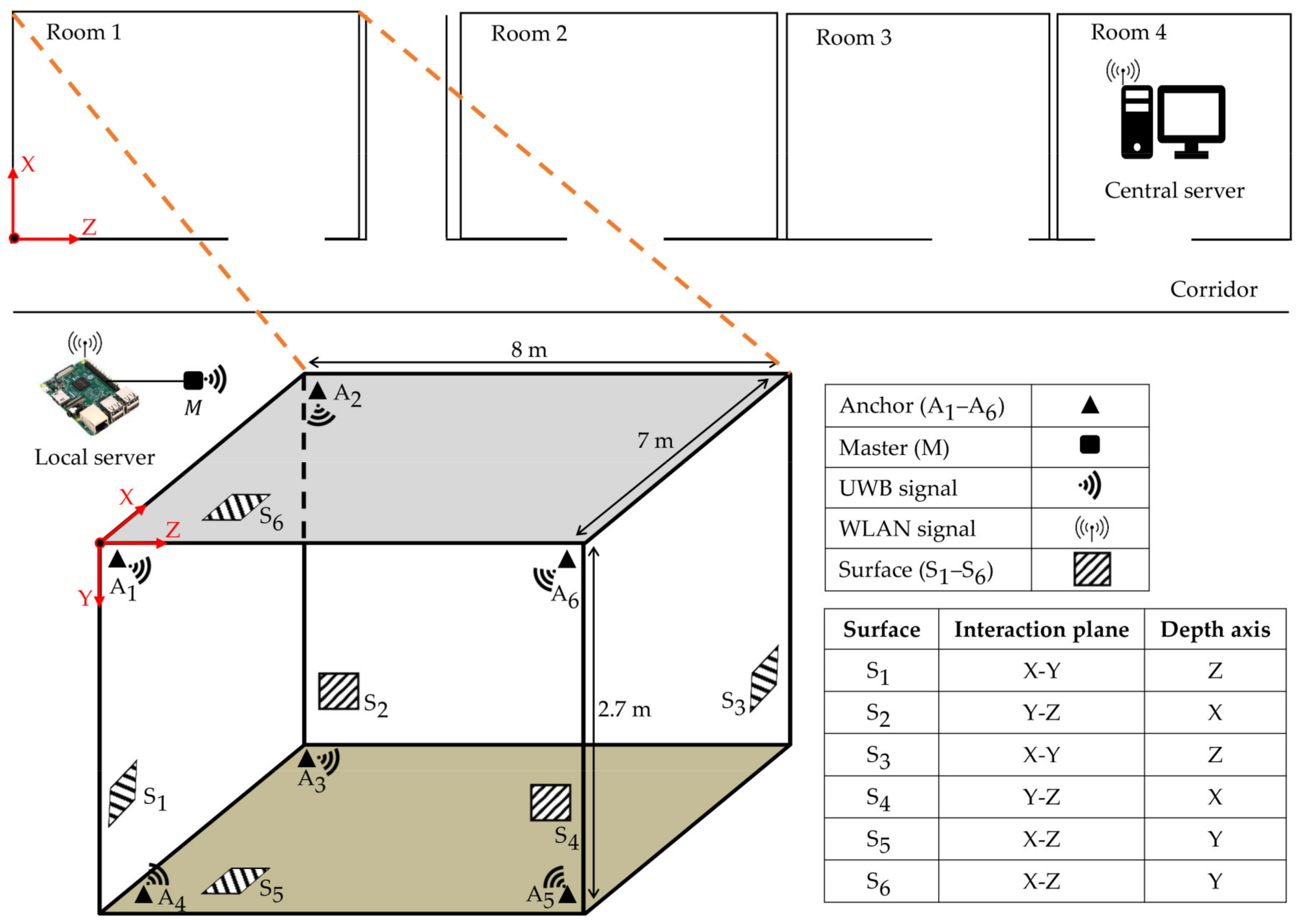
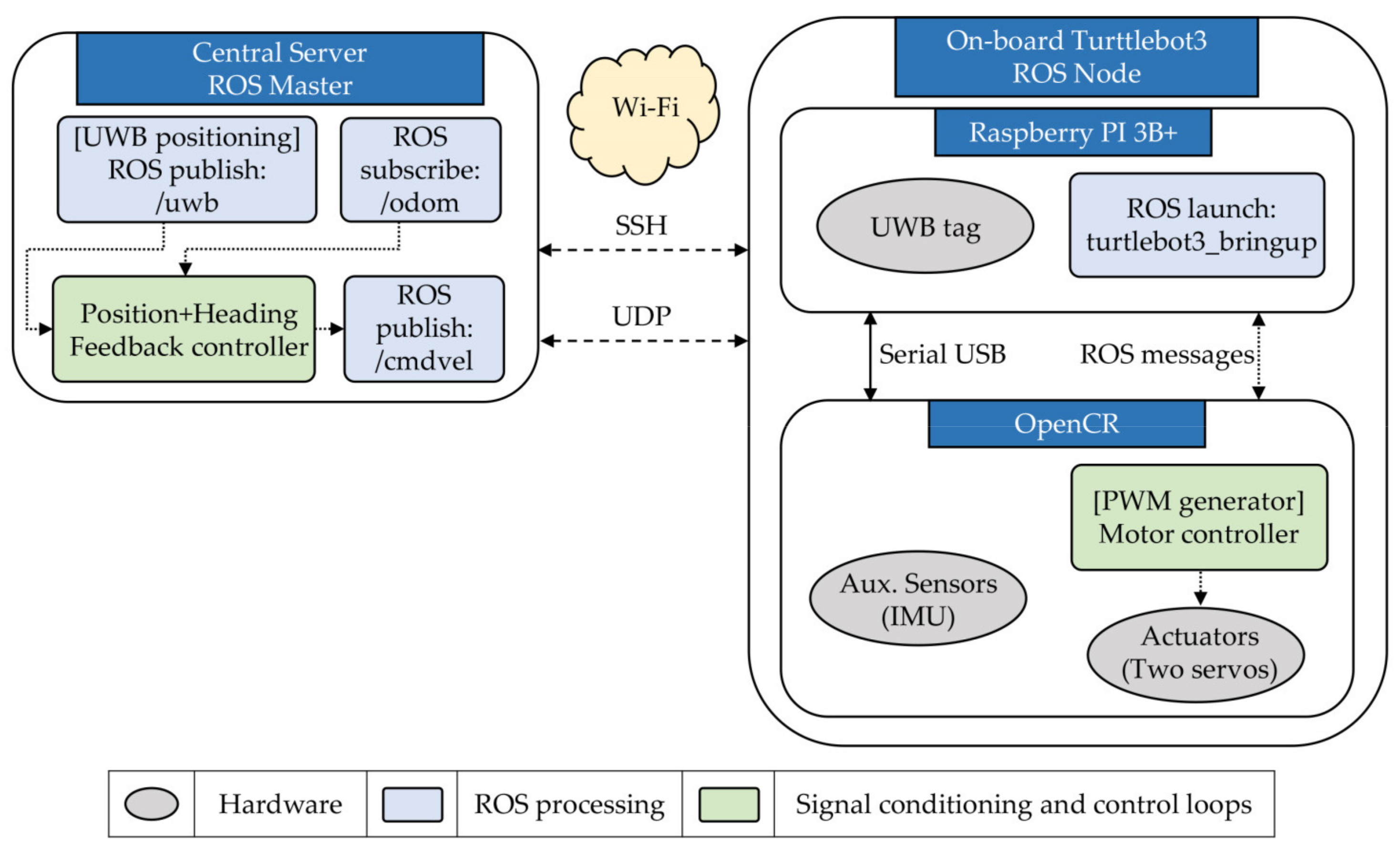
An interaction management scheme needs to be implemented to regulate the interaction process inside different interactive spaces (e.g., rooms or exhibition halls). The central server and the distributed local servers perform data handling and processing among all other system parts. The local servers are connected to the master nodes (
Figure 1) and run the UWB positioning algorithm to update both user’s hand and the USAP platform positions. In the meantime, each local server delivers the positioning information to the central server using Wi-Fi communication, where different threads run parallelly to update the display content, control the USAP platform navigation, and perform calibration of the projected screen. The projected content is updated according to the USAP platform’s current position and orientation. Assume the USAP platform can serve in an exhibition environment where a pre-defined interaction content needs to be projected for each artifact. Therefore, the intended projection content can be automatically assigned by switching between different pre-designed interactive user interfaces (UIs) when defining the robot position and orientation inside the central server. The central server transmits the projected image wirelessly to the HDMI wireless receiver. Our system not only provides the possibility to interact with a projected screen but also to customize the location of the screen. The user designates two diagonal points anywhere to define the screen boundaries then the USAP platform navigates to the most proper location to deliver the desired screen (
Section 4.2). The central server communicates with the USAP platform using Wi-Fi communication and uses ROS messaging to control its navigation path. With any movement for the USAP platform, a re-calibration for the projected screen is needed. The details of how to perform this UWB-based and light-computational calibration are described in (
Section 4.1).
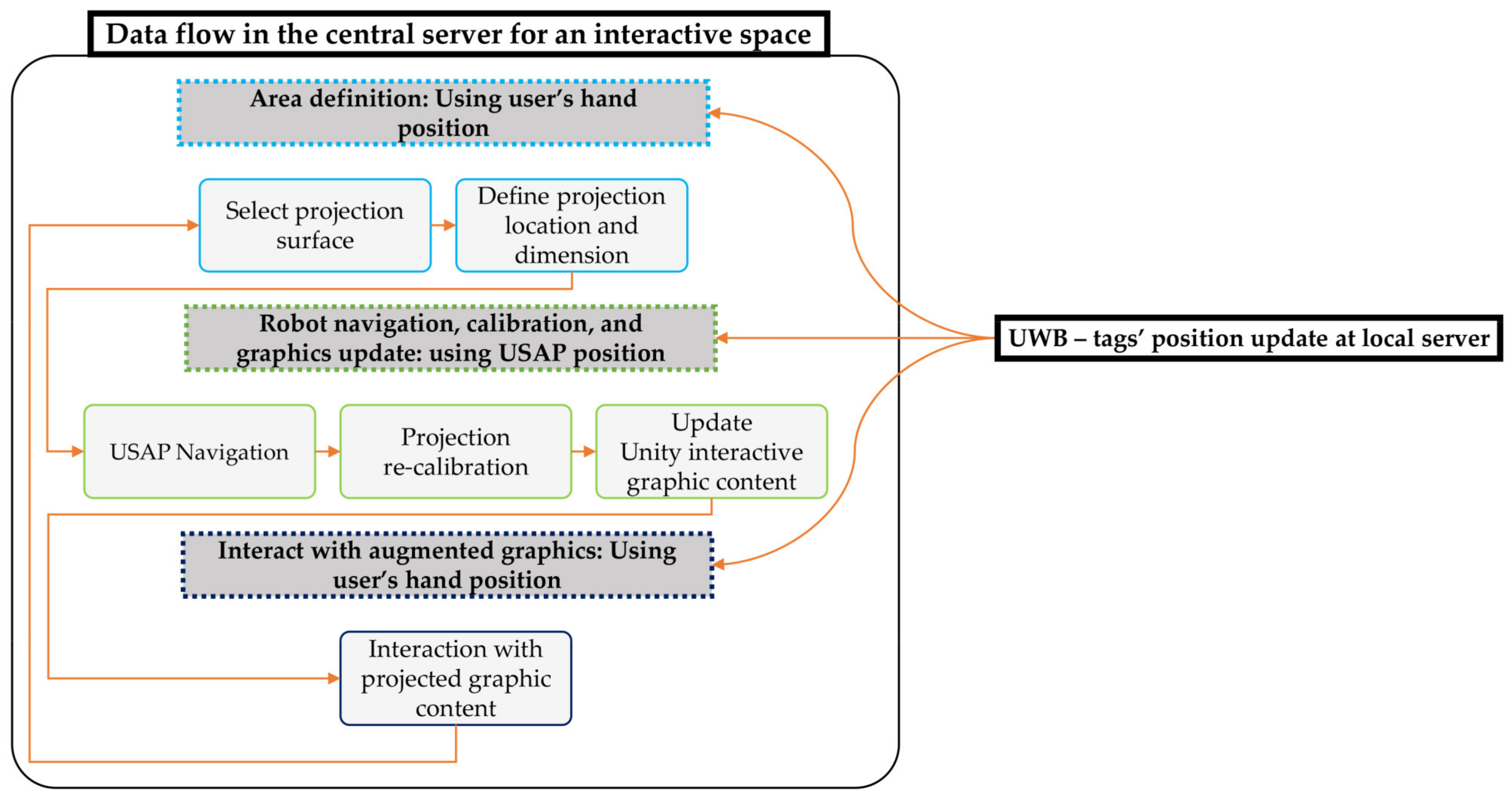
Figure 7 describes the complete data flow inside the central server for an interactive space. It shows the interaction management scheme that combines the user designation of the projection region of interest, navigation of the USAP platform, calibration for the new projected screen, and finally, detecting the interaction according to the user’s intent (
Section 4.3). Interaction detection runs through Unity software, which is used as a graphics handler; collisions can be detected between the designed graphics location and user intervention position. The UWB positions of the user and the USAP are crucial information for all sections. Similar data flow can be replicated when required for multi-interactive spaces under the control of both the central server and the distributed local servers.
5. Experimental Design
5.1. Demographic Information and Procedure
Sixteen participants were recruited to perform this experiment. Participants’ age ranged between 25 and 38 years old (M = 28.75; SD = 3.29; Gender: Male = 11; Female = 5). All were postgraduate students with diverse technical backgrounds (engineering, bio-medical, physics, etc.) and nationalities. Participants did not report any mobility problems (e.g., problems using their hands), and all of them used their right hand for performing the interaction. Our system would be used mainly for interactive demonstrations or education purposes and supposed to be used by the trained people. Therefore, testing our system with different population groups was not essential. Each participant was compensated for an hour of their time with a gift that cost on average $10.
An experiment of four stages was designed to evaluate our system performance. In the first stage, interaction accuracy, interaction time, and the user’s workload were tested while varying the user’s relative interactive distance with the projected screen. In the second stage, we tested the projected screen’s customization function and the interaction performance in the presence of UWB-based calibration under the same criteria as in the first stage. The USAP navigation accuracy, navigation time, and the difference between the user’s desired designated screen and the actual projected screen were reported as well. In the third stage, we evaluated the hand-held input device performance by testing its swiping accuracy in different directions and measuring the user’s workload performing this task. In the fourth stage, participants were asked to evaluate our system’s overall experience using a system usability scale. Participants were instructed to take a five-minute break during the transition between experimental stages while the experimenter setup the software and hardware needed for the next stage.
To reduce the learning effect, we designed a counterbalanced within-group experiment by making participants undergo the four stages and shuffling the order of the first stage’s sub-parts (interacting from close and far distances). Before starting the first stage, participants provided their personal information by answering preliminary questions through a pre-designed online survey using the Survey Monkey platform. They were then asked to read an explanation describing the general use of our system, UWB tracking technology, the various hardware components (e.g., the USAP platform and the hand-held input device), and mainly what they will be asked to perform during the experiment.
The experiment was conducted in a controlled laboratory environment, where six UWB anchors were installed in an 8 × 7 m
2 room, as illustrated in
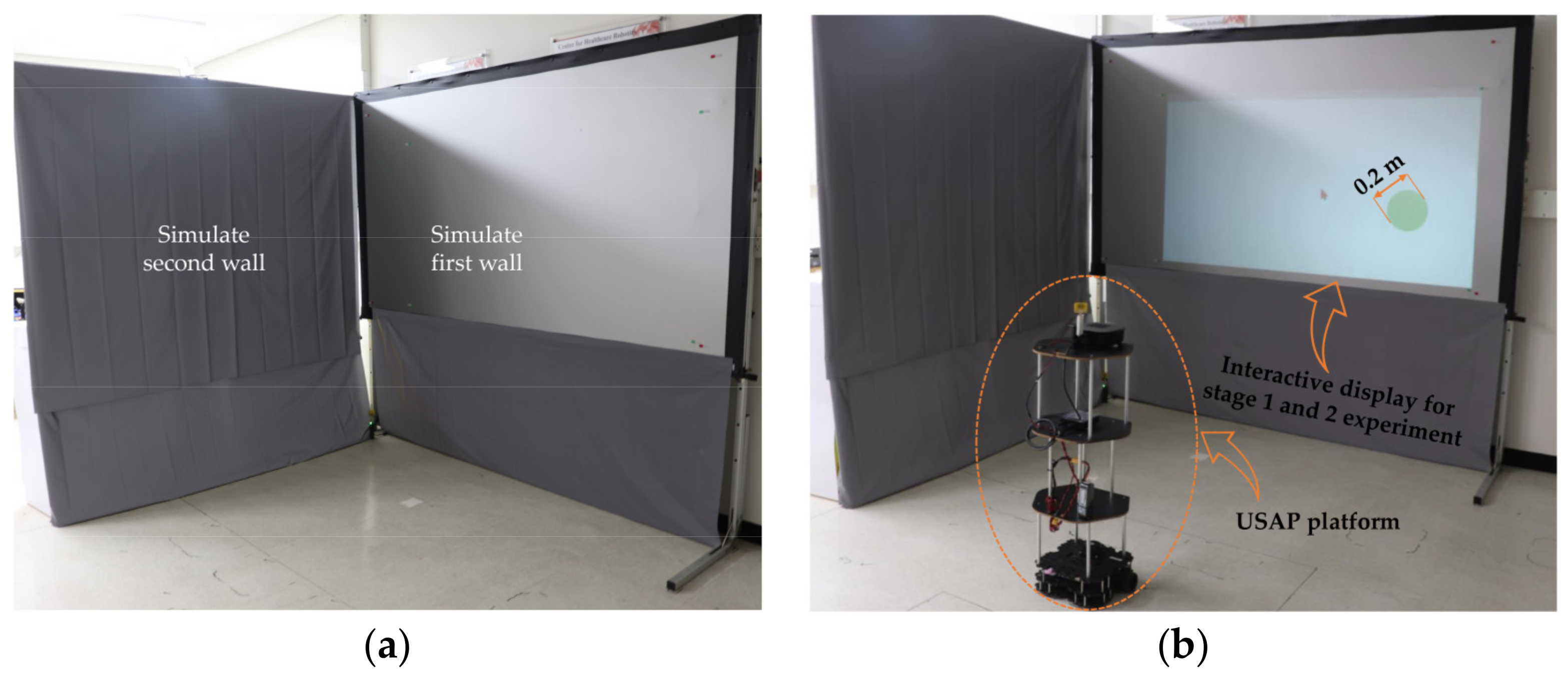
Figure 4. The tracking accuracy given by the UWB sensor’s manufacturer was +/−0.1 m laterally and about +/−0.2 m vertically, where we set the position information update rate to 20 Hz. Most of the time, the tracking accuracy values were lower than the upper accuracy limits provided by the UWB sensor’s manufacturer. Our laboratory walls are not suitable for directly projecting images, so we installed two projector screens in the form of an L-shape to simulate two walls with a size of 2.5 × 2.1 m
2 for each (
Figure 8a). The USAP platform was positioned at different distances from the simulated walls (
Figure 8b).
5.2. Stage 1: On the System’s Interaction Accuracy, Interaction Time, and Workload
Before starting the main session of Stage 1, each participant had training on using the hand-held input device and experience interacting with the projected screen’s items from varying distances. In the beginning, the USAP platform holds back its position 2 m away opposite to Wall 1 (
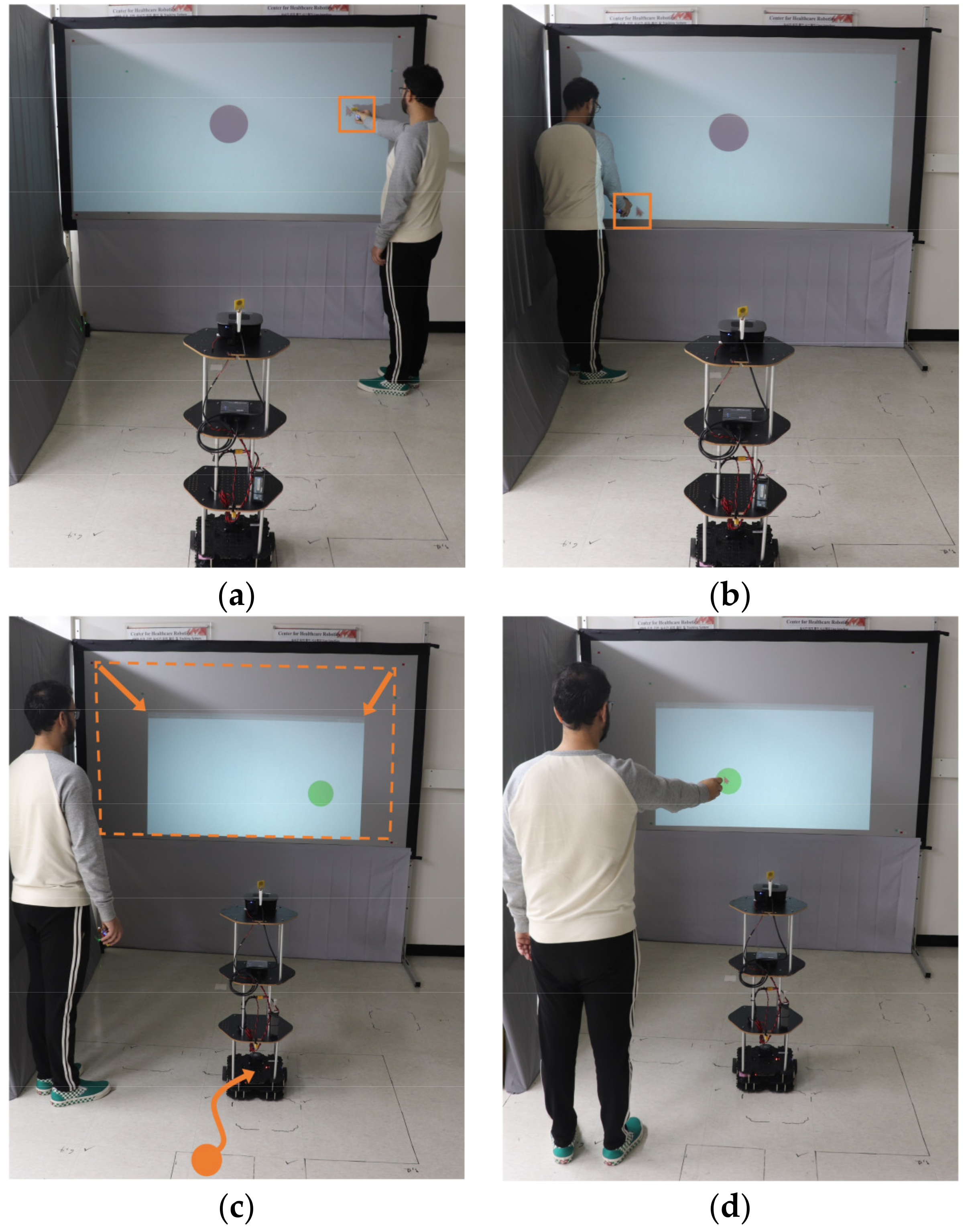
Figure 8b) while keeping the orientation that placed the projector perpendicular to the horizontal centerline of the same wall. The projected screen was created using Unity software to generate a 2D interactive image of 19 randomly placed circles with a 0.2 m diameter appear on the screen. Each participant was asked to use the input device to click the center of each circle precisely and quickly as much as possible, where visual feedback was given on the user’s hand position in the form of a cursor on the projected screen. One circle stays on display until the participant clicks the input device’s button then a new circle appears in a new location. Participants were asked to stand at different distances opposite to Wall 1. Firstly, they interacted from a close distance by choosing a location between the USAP platform and Wall 1; afterward, they stood behind or beside the USAP platform according to their preference to try the far distance interaction (
Figure 9a,b). The participants were free to choose between moving to face the popped-up circle or stretch their hand aside to reach the circle location in both interaction distances. Once the participant had enough experience using our system, we moved forward to the main session.
In the main session, participants tried to reach the randomly popping-up circles and select them by clicking the hand-held input device’s button. Half of the participants start to experience close distance interaction, where the rest of the participants start with far distance interaction. In each case, nineteen circles needed to be reached and selected. Interaction accuracy was calculated when the participant pressed the input device’s button to trigger the target circle. The Euclidian distance was measured by finding the distance between the cursor’s tip and each target circle’s center point positions using Unity engine to measure the interaction accuracy. The calculated Euclidian distance is converted from pixels scale to a meter scale representation using pixels per meter constants (9, 10). Interaction time was also considered as a criterion to evaluate system performance. The elapsed duration between the circle’s appearance and the participant’s selection was measured in seconds to calculate interaction time. Finally, the workload for both interaction distances was measured using the NASA-TLX index [
51]; participants were asked to fill out the online survey’s relevant workload parts immediately after they finished each interaction.
5.3. Stage 2: Experience Screen Customization Function and Examine the Influence of UWB-Based Calibration on System Performance
In this stage, customization of the projected screen was tested. Participants designated two diagonal points defining their demanded location and size of the projected screen. In response, the USAP platform moves to deliver the most appropriate display (
Figure 10). Subsequently, the participants were asked to perform the same interaction task (to select 19 popped-up circles) as in the first stage. However, participants did this task one time and were free to choose the interaction distance according to their preference. To unify the test condition between the first and the second stages, the popped-up circles kept their 0.2 m diameter by updating their graphical size according to the USAP new position. In the first stage, we defined a pre-calibration measurement for the projection boundaries, as the USAP platform remained static for the entire duration of this stage. Unlike the first stage, the USAP platform was no longer static and was moving around, fulfilling the user’s projection demands. Therefore, the UWB-based calibration algorithm (
Section 4.1) needs to be activated. Testing this calibration algorithm’s influence on interaction accuracy, interaction time, and the user’s workload was one of this stage goals, as it is considered key to enabling customized interactions in any location. In the first and the second stages, the success percentage to trigger the popped-up circles was measured, where a false trigger means the participant clicks the input device’s button when the cursor is positioned outside the circle boundaries; in other words, when the interaction accuracy is greater than 0.1 m. Moreover, the undetected triggers were counted to evaluate the efficiency of using our input device for this interaction task. To count these missed triggers, the experimenter asked the participants to inform whenever the projected content does not update (circle does not appear in a new location) after they perform a clicking action.
Evaluating the screen customization process requires answering the following questions: How accurate is the actual customized screen relative to the user’s desired input screen? How accurately can the USAP platform navigate to the target point to customize the projection? How fast can the USAP navigate from the start to the target point? To answer these questions, we stored the participants’ desired input screen dimensions (using the user’s input diagonal points) and compared the virtual screen with the actual screen we obtained after the USAP platform navigated to the target point. Interactions were performed on S1, where the user could define the projected screen over the X-Y plane and the USAP platform navigated within the X-Z plane, as it has a constant height on the Y-axis. Additionally, we stored the navigation path for the USAP platform and recorded the trip duration to the target 2D position.
By the end of Stage 2, participants were asked to share their thoughts about the importance of the projected screen’s customization feature using a 10-point Likert scale question.
5.4. Stage 3: On the Evaluation of the Hand-Held Input Device Interaction Features
In Stage 3, we evaluated other interactive features of the hand-held input device. As discussed before, the input device was equipped with a UWB tag to track the user’s hand movements and a push-button to trigger the selection. In the first and second stages, we used the input device to select the popped-up circles and evaluate various interaction performance aspects. In addition, our customized device could also perform a mid-air drag-and-drop task for a target item (
Section 7.4), and it enables the user to perform basic UWB-based mid-air swiping gestures (
Section 4.3) for a particular interaction purpose. Drag and drop interaction shares the same mechanism as the normal triggering task in the first and second stages. However, the swiping gestures interaction has a different implementation technique; therefore, we need to evaluate this interaction channel’s performance.
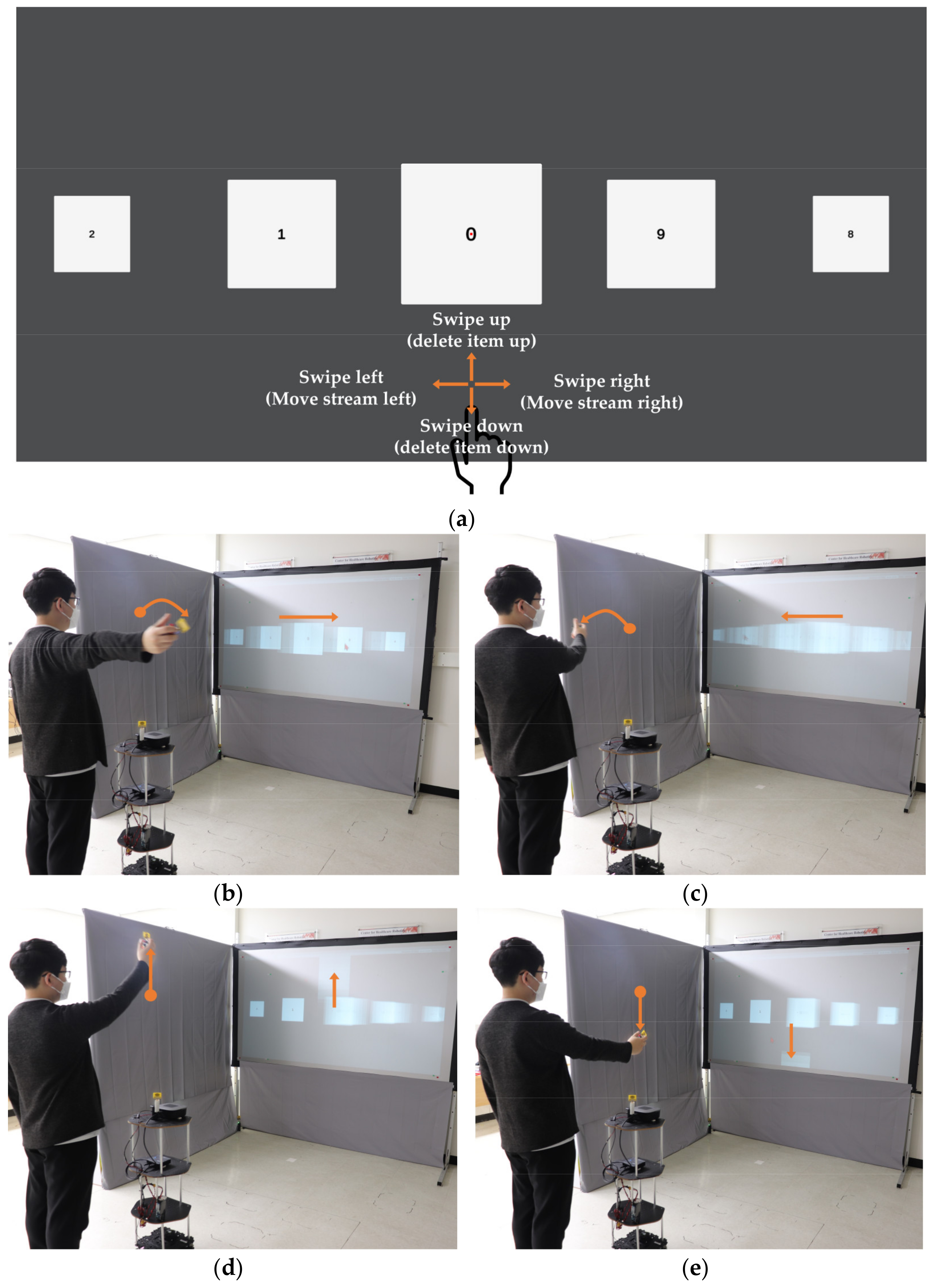
Participants started the third stage learning how to perform swipe gestures in four directions (right, left, up, and down) using the input device. Corresponding to their swipe gestures, they could perceive the motion of a stream of numbered blocks designed by the Unity engine (
Figure 11a). The numbered blocks shifted right or left when a participant swipe their hands right or left, respectively. The participant could delete the central block up or down by swiping up or down.
After participants feel familiar with using our device to perform swiping gesture-related interactions, we move forward to the evaluation part. In this stage, we measured the swipe gestures detection accuracy by counting missed or wrong swipes. Missed swipe means that the participant made a swipe gesture in a specific direction, but it does not reflect any movement in the numbered blocks stream. The wrong swipe refers to an uncorrelated movement in the numbered stream (e.g., the participant performs a right swipe action, and the numbered stream shifts left). Also, we check the workload amount when doing UWB-based mid-air swiping tasks. To assess the interaction performance, the experimenter asked each participant to perform four tasks using the input device (
Figure 11b–e):
Bring the block with the number 5 to the screen’s center by swiping right.
Bring the block with the number 9 to the screen’s center by swiping left.
Bring the block with the number 7 to the screen’s center by swiping right and then delete it by swiping up.
Bring the block with the number 2 to the screen’s center by swiping left and then delete it by swiping down.
Eighteen swipe gestures are the total number of swipes each participant supposed to do when following the previous four steps without encountering any problem. The experimenter monitored each participant’s performance and asked them to report any wrong or missed swipe to calculate the swipe gestures interaction accuracy. Both missed and wrong swipes represent an unwanted performance of UWB-based swipe gesture detection.
Additionally, participants were asked to assess their workload when performing swipe tasks through the online survey and answer a 10-point Likert scale questioner to understand how they think about the importance of adding these swipe gestures interactive features.
5.5. Stage 4: Evaluation of System Usability
Even though participants experienced our system throughout previous stages and read about different system components in the online survey introduction, they did not have detailed knowledge on how this technology can be used, i.e., in which practical contexts the USAP platform could be employed. Therefore, it was essential to reveal a possible utility or application of our system that participants could understand. In the fourth stage, participants were asked to watch a video showing our system’s usage in a museum-simulated environment (
Section 7.4). Participants were then asked to fill out a System Usability Scale (SUS) using the online survey to evaluate the system’s overall usability based on their practical experience during all prior stages and the knowledge they obtained from watching the demonstration video. Using a video-based survey is a common method of evaluating system performance [
52], especially when participants cannot use all system features themselves because they are not in a certain location or experimental limitations in terms of time or physical fatigue.
6. Results
To test the interaction accuracy and interaction time across various interaction cases, the collected data were subjected to one-way repeated measures ANOVA tests for post-hoc tests at a 5% confidence level. Equivalence tests were performed to analyze pairwise comparisons (Bonferroni-corrected or Games-Howell-corrected as post-hoc tests after checking the homogeneity of variances). Also, we used the independent samples Kruskal–Wallis H test as a non-parametric test to analyze the participants’ workload data across various interaction cases.
The correct selections of popped-up circles were counted for each interaction case to determine the success hit percentage in Stage 1 and Stage 2. To assess the performance of customizing the projected screen, the accuracy error between the participants’ desired screen and the actual customized screen was calculated. Additionally, the navigation accuracy and time of the USAP platform were presented. In Stage 3, the success percentage rate was calculated to evaluate the hand-held device’s swiping accuracy. Finally, in Stage 4, the system usability scale was examined to evaluate the overall usability of our proposed system.
6.1. Triggering Task Interaction Performance
In Stage 1 and 2 participants interacted with our system using three different interaction cases: Close interaction with fixed pre-calibration measurements (close interaction), far interaction with fixed pre-calibration measurements (far interaction), and free distance interaction with activating the UWB-based calibration (active calibration interaction). Participant’s interaction accuracy, interaction time, and workload were calculated for each interaction case to investigate the influence of the interaction distances and the active UWB-based calibration on the participants’ interaction performance. It is essential to mention that fourteen out of sixteen participants prefer interacting from a far distance during the active calibration interaction case.
6.1.1. Interaction Accuracy
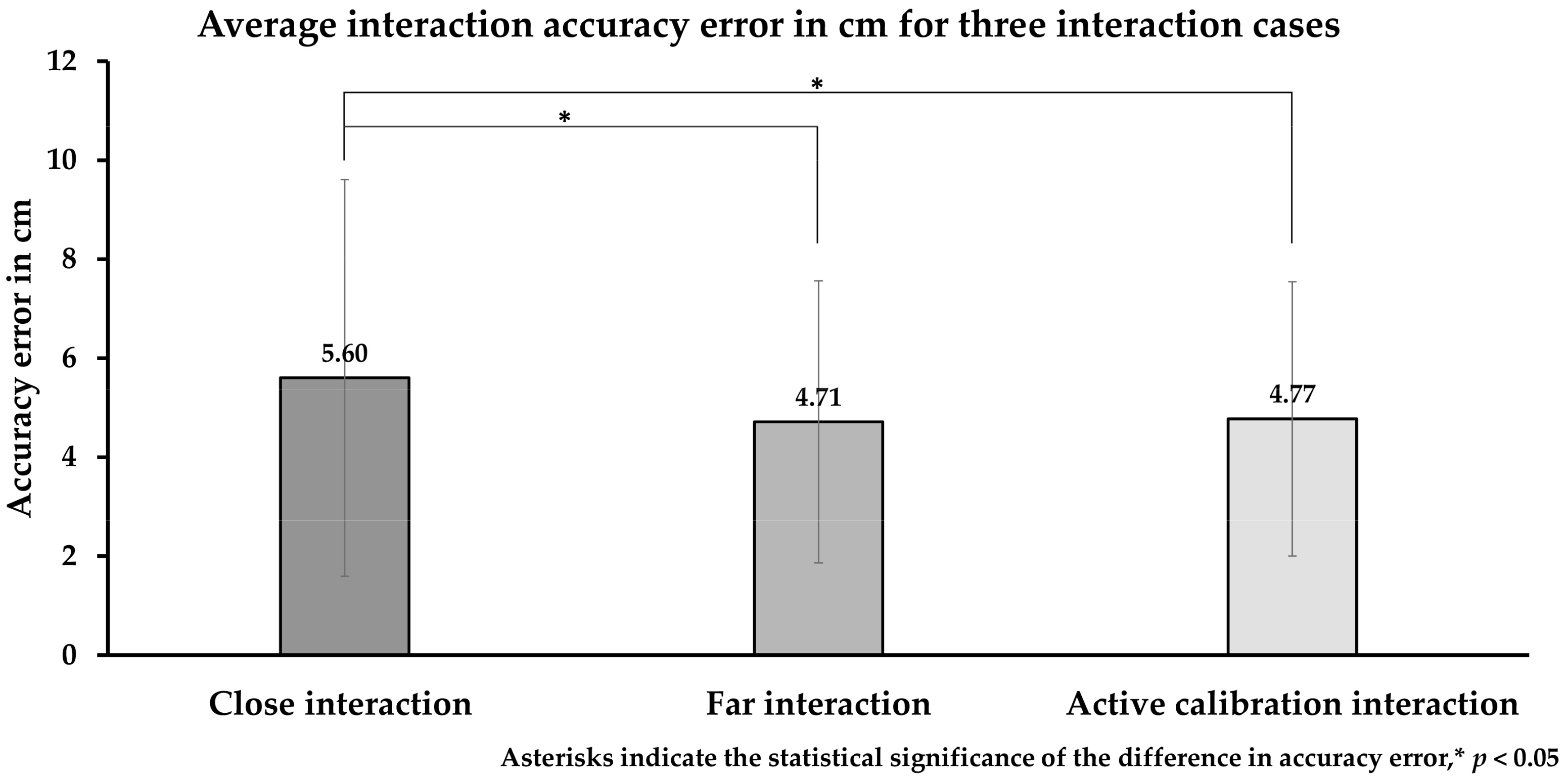
We analyzed the average interaction accuracy for each interaction case across Stage 1 and 2. We found that interaction distance significantly influences interaction accuracy, where participants achieve better interaction accuracy when interacting from a far distance. On the other hand, the UWB-based calibration algorithm performs almost the same as fixed pre-calibration measurement, indicating high efficiency while using this algorithm for mobile interactive scenarios.
The one-way repeated measure ANOVA test shows an overall significant difference between the three interaction cases (close, far, and active calibration);
F (2, 30) = 4.22,
p = 0.024. The interaction accuracy error in the case of close interaction
(M = 5.60,
SD = 1.21) was significantly higher than the active calibration interaction
(M = 4.77,
SD = 1.15,
p = 0.037) and the far interaction
(M = 4.71,
SD = 1.06,
p = 0.023) cases. There were no significant differences in the interaction accuracy error between far and active calibration interaction cases (
Figure 12).
The success percentage rate (where participants successfully click inside the circle boundaries) was 90.46% for close interactions, 95.07% for far interactions, and 96.6% for active calibration interaction cases.
6.1.2. Interaction Time
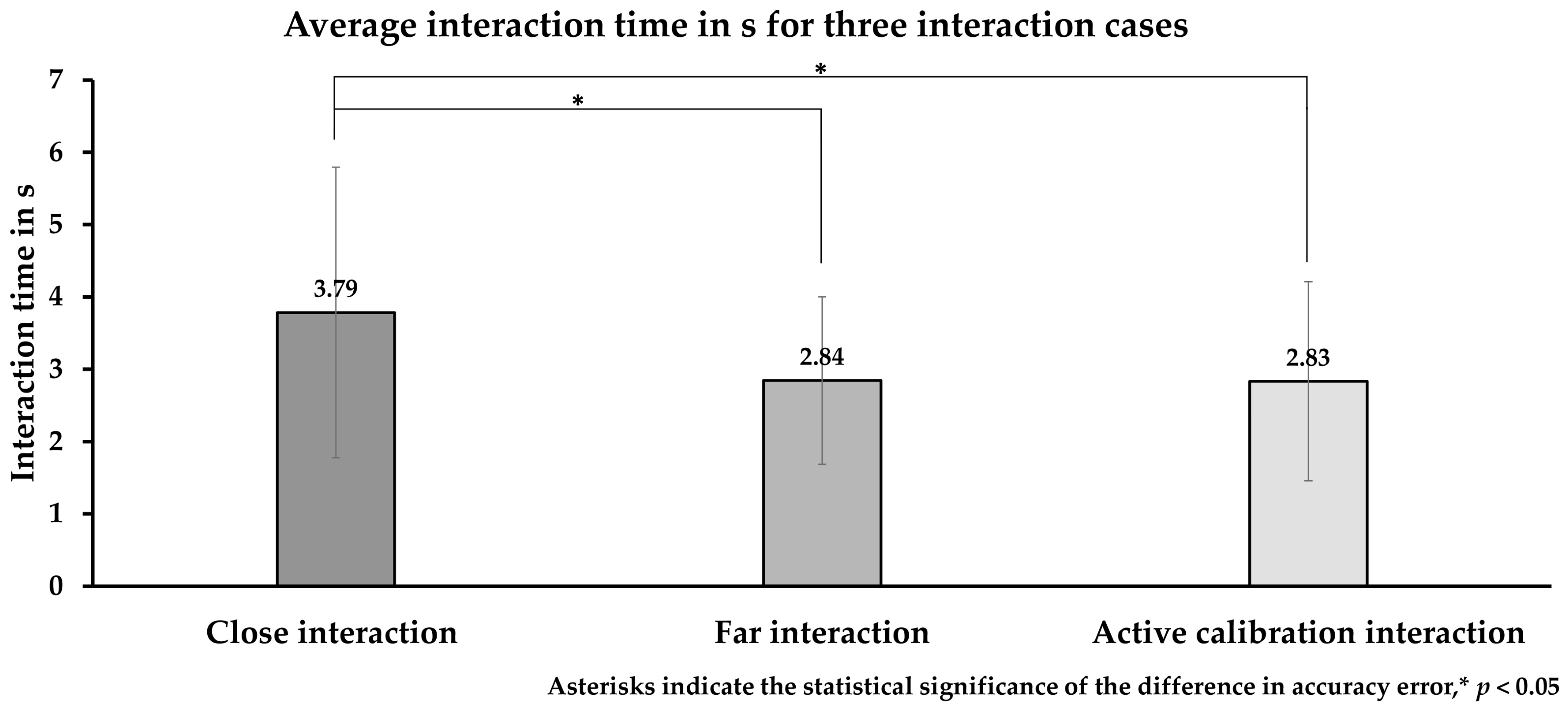
The average interaction time were measured for each interaction case across Stage 1 and 2. Similarly, far distance interaction reduces the interaction time significantly, where the UWB-based calibration algorithm does not influence the interaction time.
The repeated measure ANOVA test shows a significant difference between the three interaction cases (close, far, and active calibration);
F (2, 30) = 6.51,
p = 0.005. The active calibration interaction case had the fastest interaction time
(M = 2.83,
SD = 0.87,
p = 0.02), followed by the far interaction
(M = 2.84,
SD = 0.65,
p = 0.010) and close interaction
(M = 3.79,
SD = 1.29) cases, as shown in
Figure 13. The interaction time of the close interaction case was significantly greater than the interaction time of the active calibration interaction (
p = 0.02) and the far interaction (
p = 0.010) cases. There were no significant differences in interaction time between the far and active calibration interaction cases.
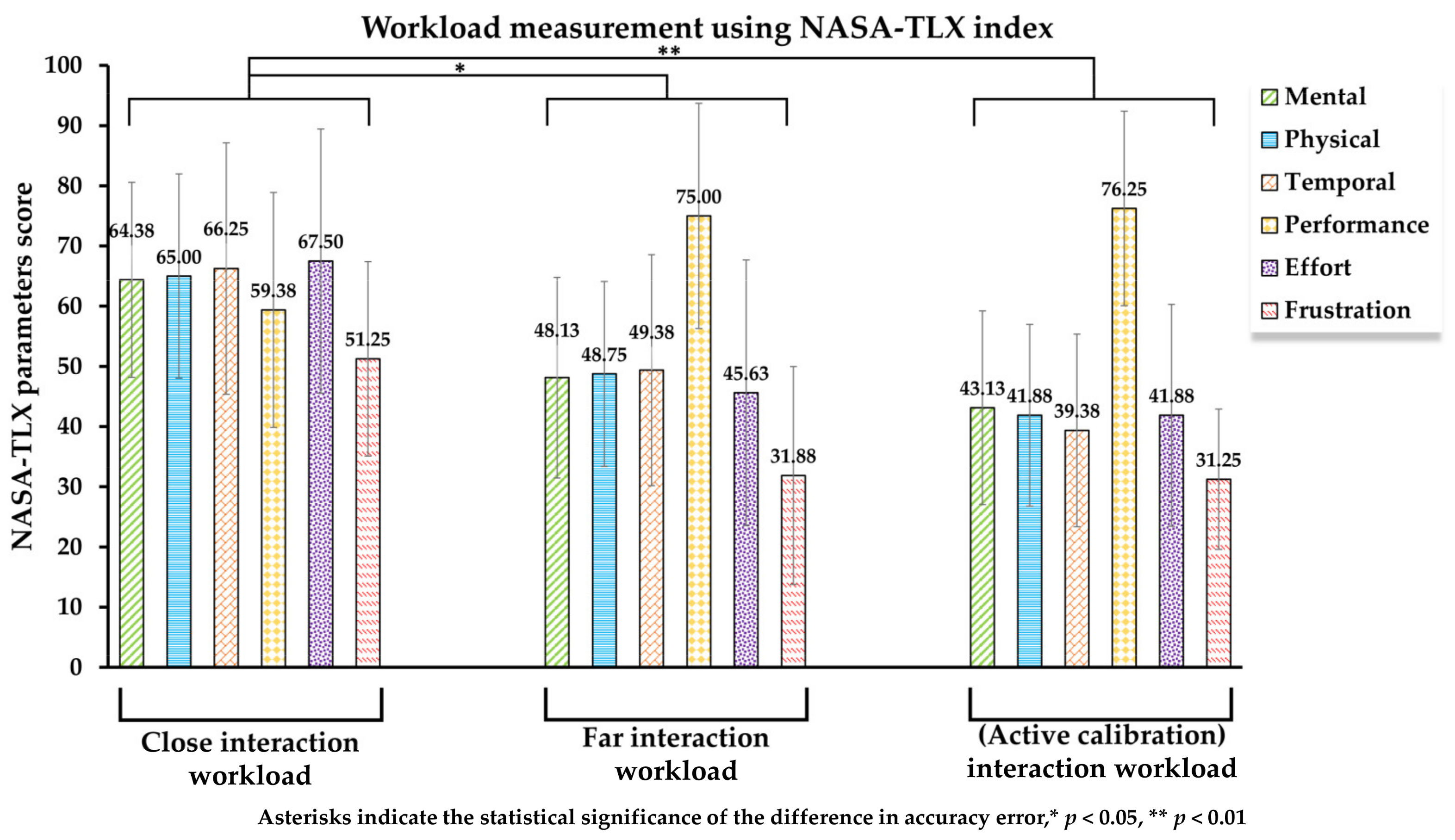
6.1.3. Workload
We measured the average workload for each interaction case across Stage 1 and 2. To determine an overall workload rating, the subjective workload was measured by the NASA Task Load Index (NASA-TLX). NASA-TLX derives an overall workload score based on six dimensions (mental demand, physical demand, temporal demand, effort, performance, and frustration). Each dimension is evaluated on a scale of 0 to 100 [
51]. Interacting from a far distance causes a significantly lesser workload consistent with previous results where participants experience more accurate and faster interaction when performing far interaction. Moreover, fixed or active calibration does not influence the interaction workload.
The Independent-Samples Kruskal–Wallis H test shows a significant difference in overall workload in the NASA-TLX:
H (2)
= 14.32,
p = 0.001. The close interaction case
(M = 59.17,
SD = 15.04) scored significantly higher workload than the far interaction cases
(M = 41.46,
SD = 14.13,
p = 0.011) and the active calibration interaction cases
(M = 36.88,
SD = 12.76,
p = 0.001). There were no significant differences in workload between the far and active calibration interaction cases, as shown in
Figure 14.
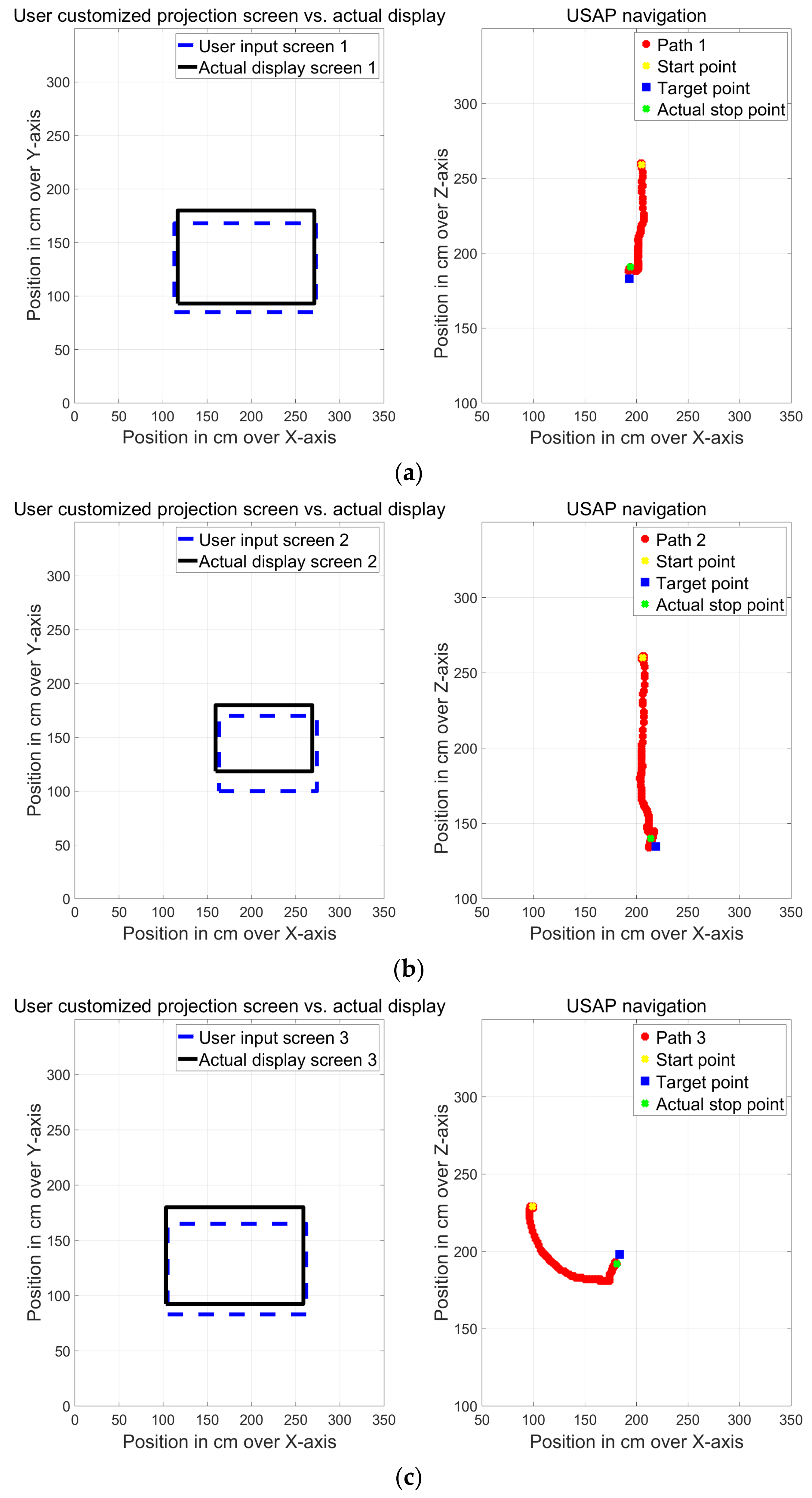
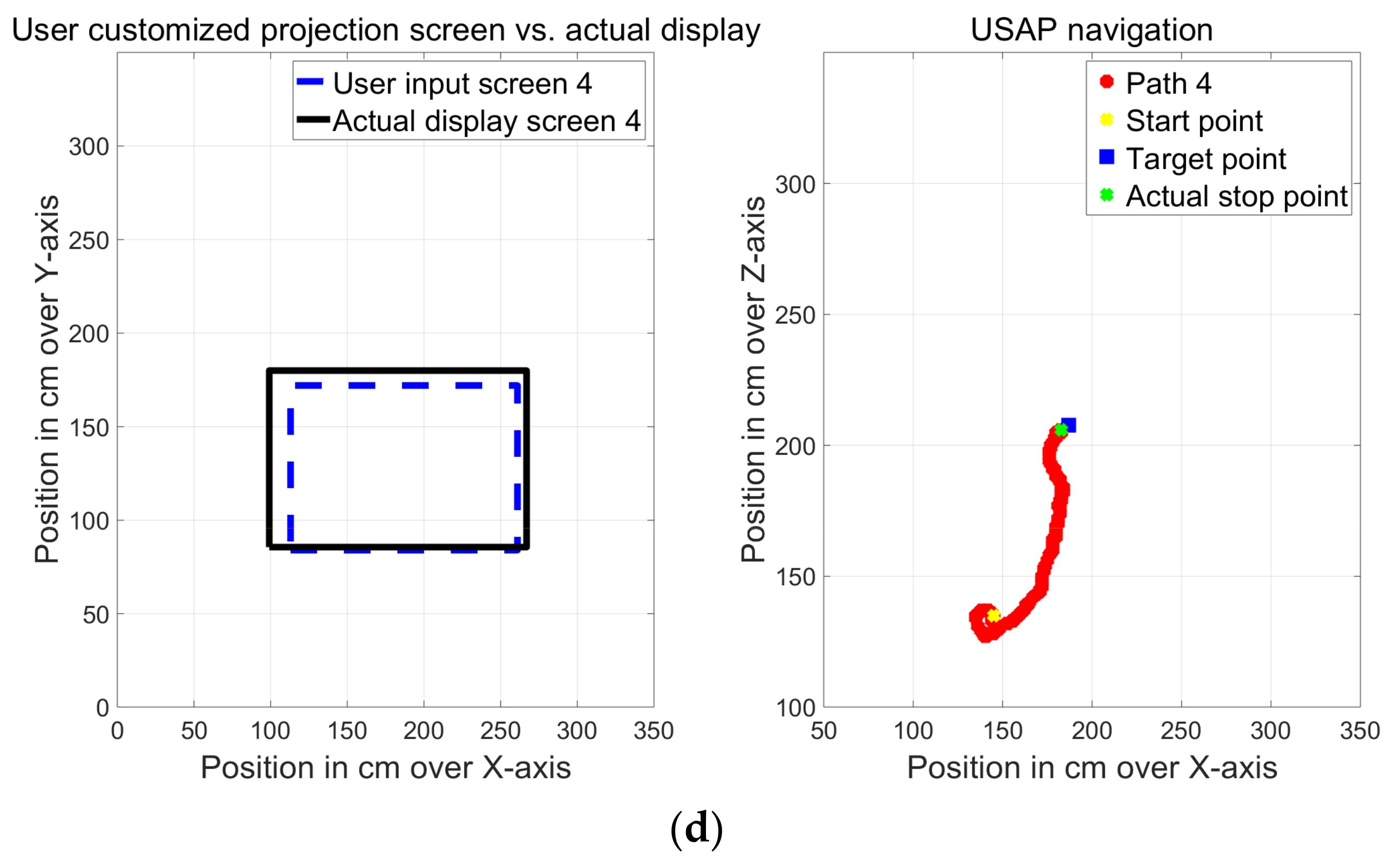
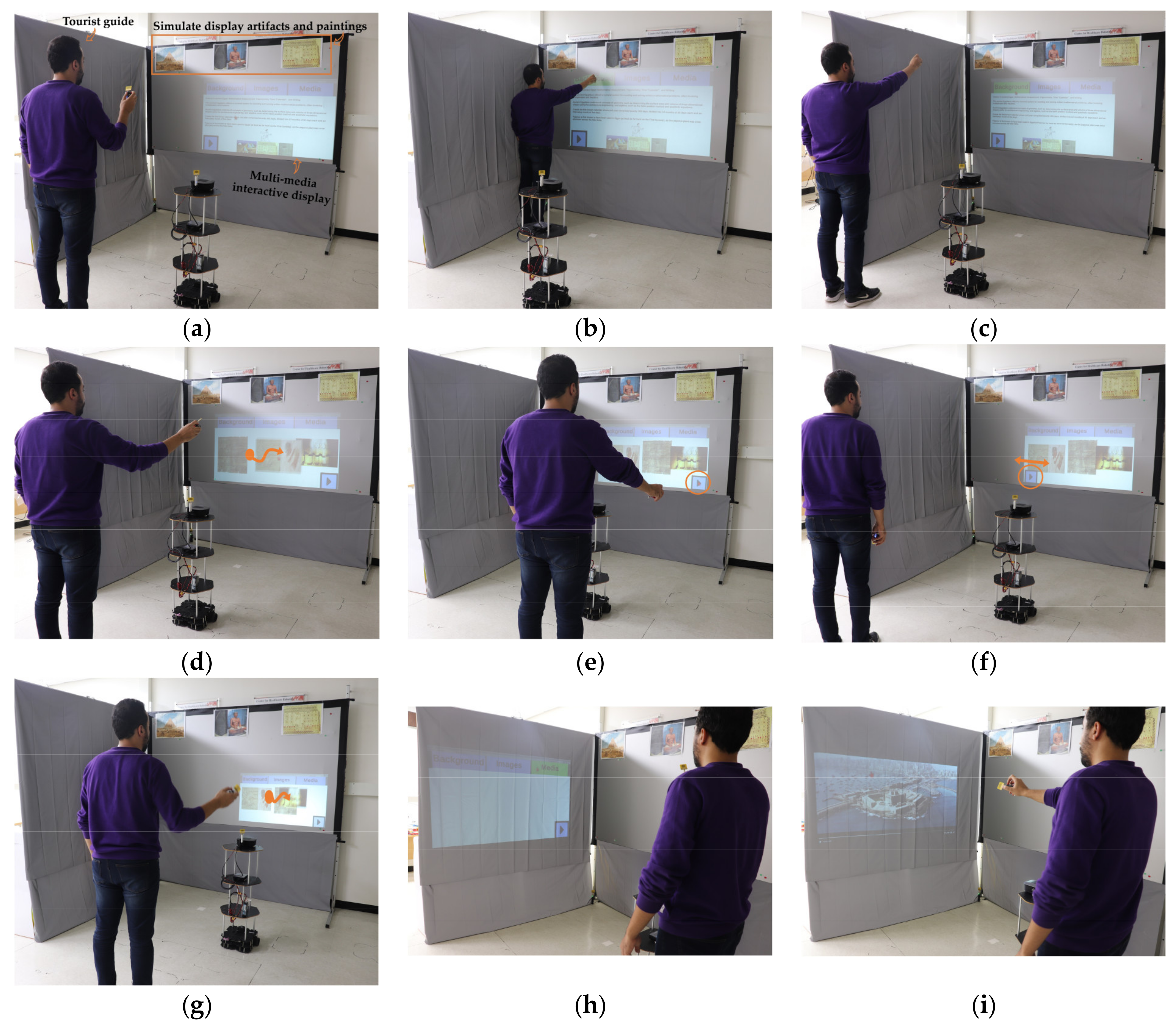
6.2. Screen Customization Performance and USAP Navigation
We stored the UWB positioning data of users’ hand activities and USAP navigation path to assess screen customization performance. Participants designated diagonal points to customize the projected screen had saved to draw the desired virtual input screen in (dotted blue), where the actual projected screen that created after the USAP platform stops movement drawn in (solid black) as shown in
Figure 15. Four examples,
Figure 15 left part, showing different trials in which four screens were customized with different sizes and locations. Comparing the two-screen tells about the accuracy level on how the user can customize the projected screen and how technically the USAP platform meets the user demand. We found that the USAP platform delivers the nearest possible customized screen to the user’s input, where the average displacement between the participant’s virtual input screen (dotted blue) and the actual projected screen (solid black) was 0.049 m on the X-axis and 0.135 m on the Y-axis.
After assigning the designated diagonal points for the desired customized screen, the central server finds the target coordinates where the USAP platform should navigate (
Section 4.2). Tracking the USAP platform position, we can determine the navigation accuracy from the target point as described in
Figure 15 right part. We found the navigation accuracy shows acceptable values that can support the demanded AR applications requirement. The USAP platform started navigating from different locations to meet the participants’ desired screen location and achieved a 0.12 m average distance accuracy from the target point. The USAP navigated within a relatively small area of 1 × 1 m
2 and took 10.4 s average time to reach the target point, including the time to adjust its heading.
Most participants (82.51%) thought that adding the feature of customizing the projected screen is important.
6.3. UWB-Based Mid-Air Triggering and Swipe Gestures Detection
We counted the missed triggers in the first two stages to evaluate the input device’s selection performance. Out of 912 triggering actions, we recorded 11 missed triggers with a success rate of 98.79%. Similarly, in the third stage we measured the success rate of swiping tasks to evaluate the UWB-based mid-air swipe gesture detection as one of the interaction channels to manipulate the augmented graphics. A high success detection percentage of 98.26% has been achieved with five missed or wrong swipes overall. While performing the swiping task, the workload was numerically the lowest compared to the workload values when doing other interaction tasks in previous stages, where NASA-TLX index scored (M = 35.41, SD = 17.76). Lastly, most participants (84.38%) thought that the swiping feature was important for interacting with projected content.
6.4. System Usability
We assessed the participants’ subjective usability using the system usability scale (SUS) for the overall system performance. SUS is a scale of 0 to 100 with increments of 10 and ranges from “Strongly Disagree” to “Strongly Agree”. SUS scores > 71 points indicate that the system is acceptable [
53]. The results of our system usability test were (
M = 77.83,
SD = 13.63), which indicates that our system was acceptable for the user.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}