
Current Ripple Reduction of Predictive Torque-Controlled Induction Motor Drive Using Delta-Star Switchover


Abstract
:1. Introduction
2. Current and Voltage Transformations of Delta-Connected Machine
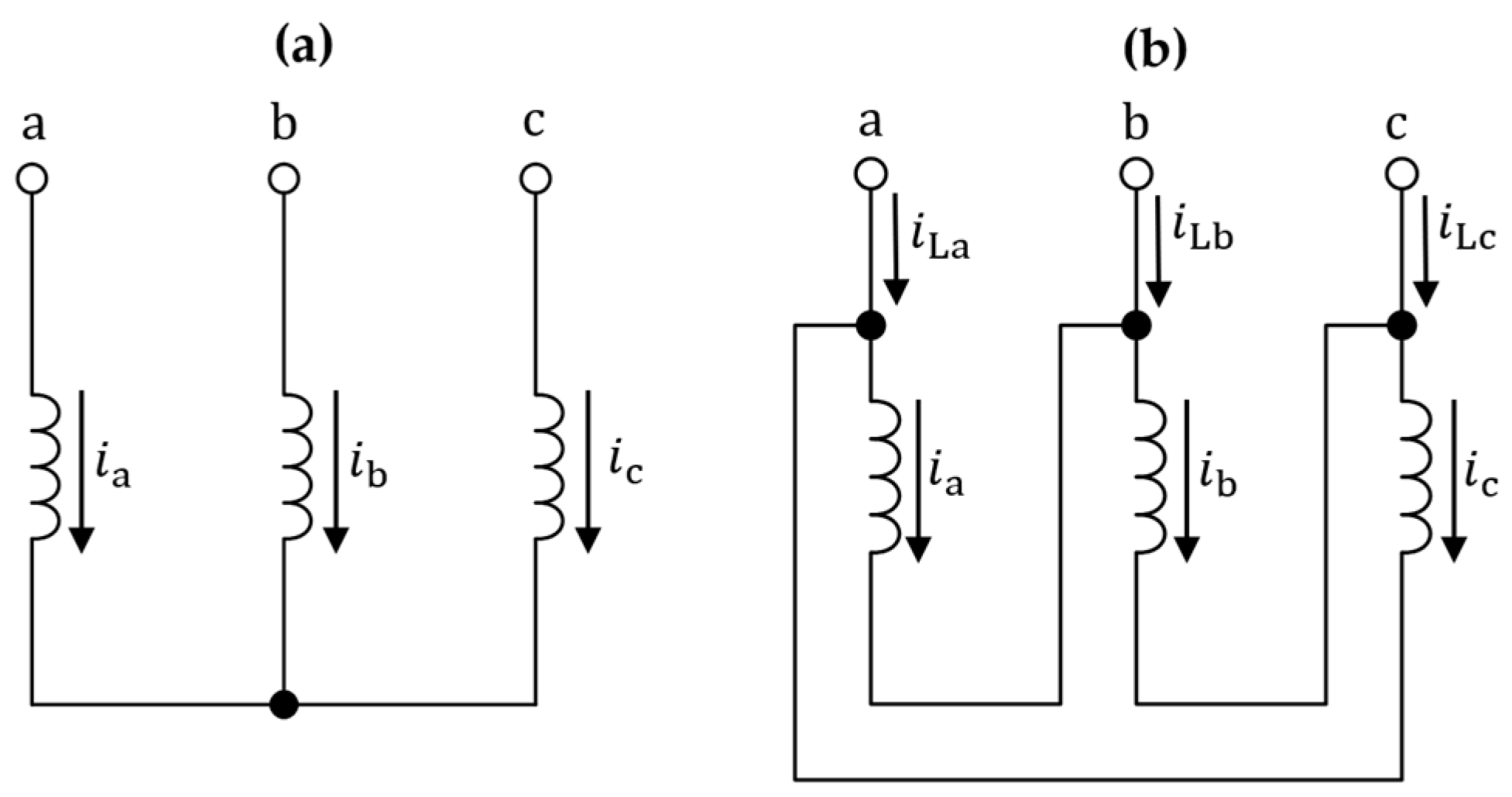
2.1. Current Transformations
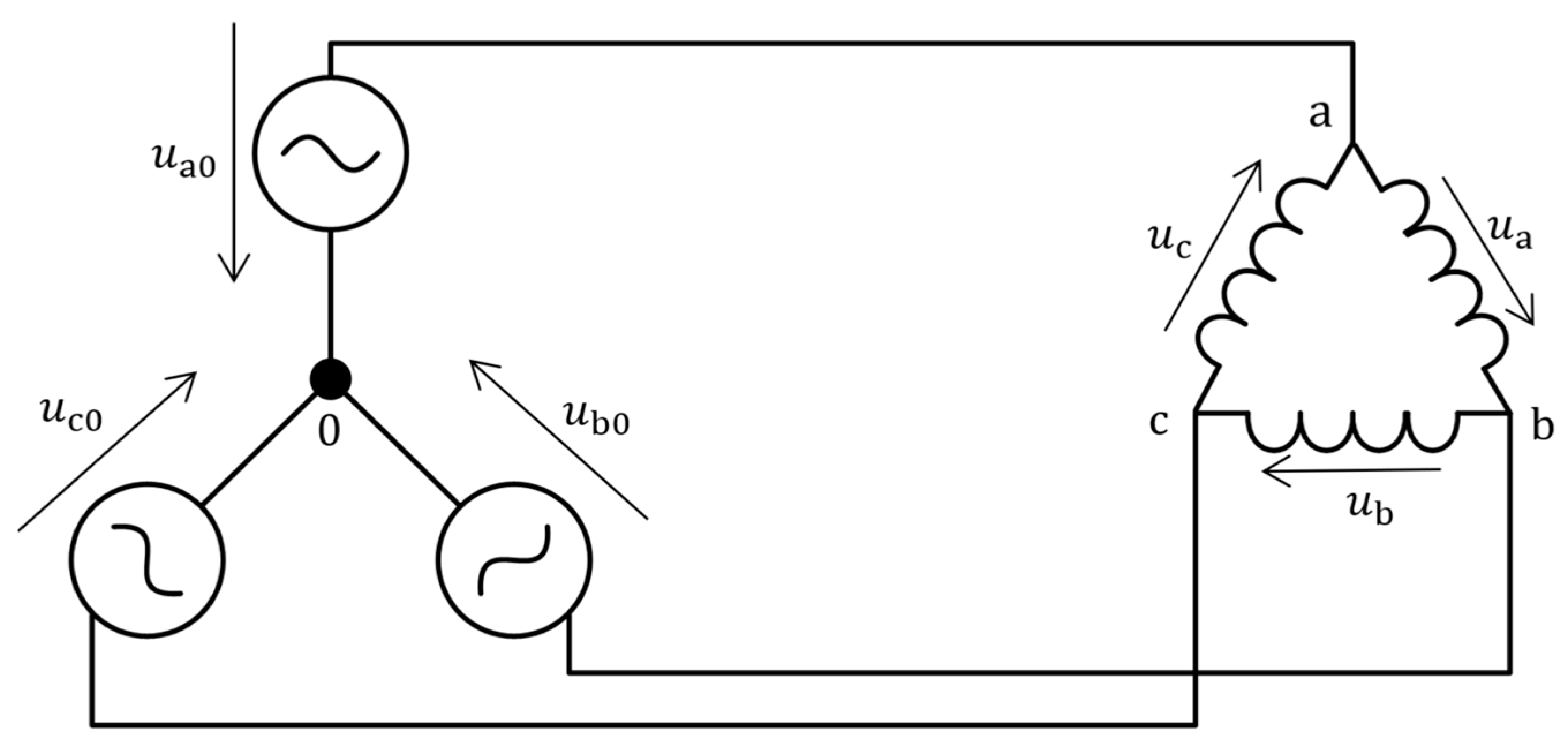
2.2. Voltage Transformations
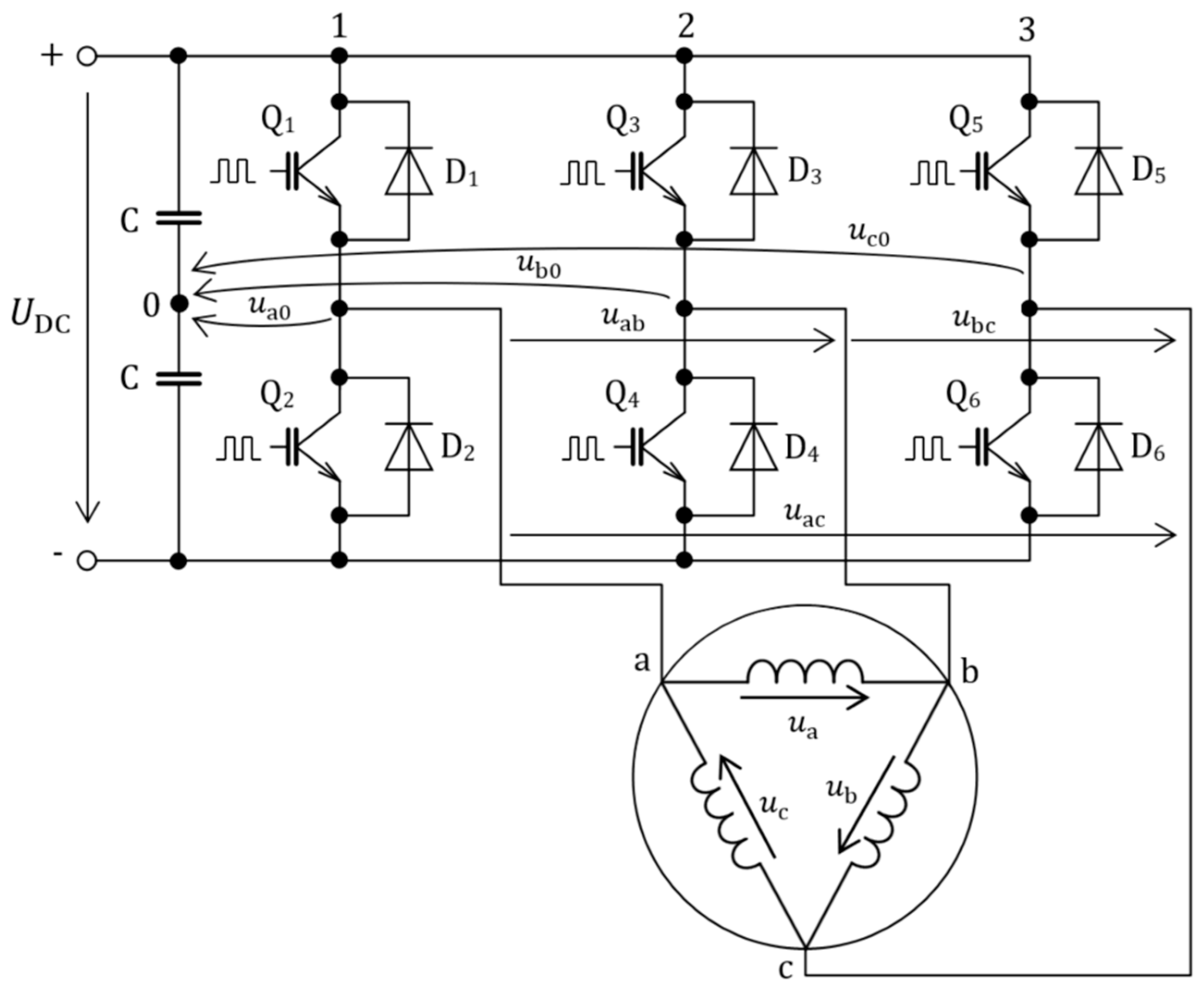
3. Predictive Torque Control with Switchable Delta-Star Winding Configuration
3.1. Considerations about Flux, Torque, and Speed Control
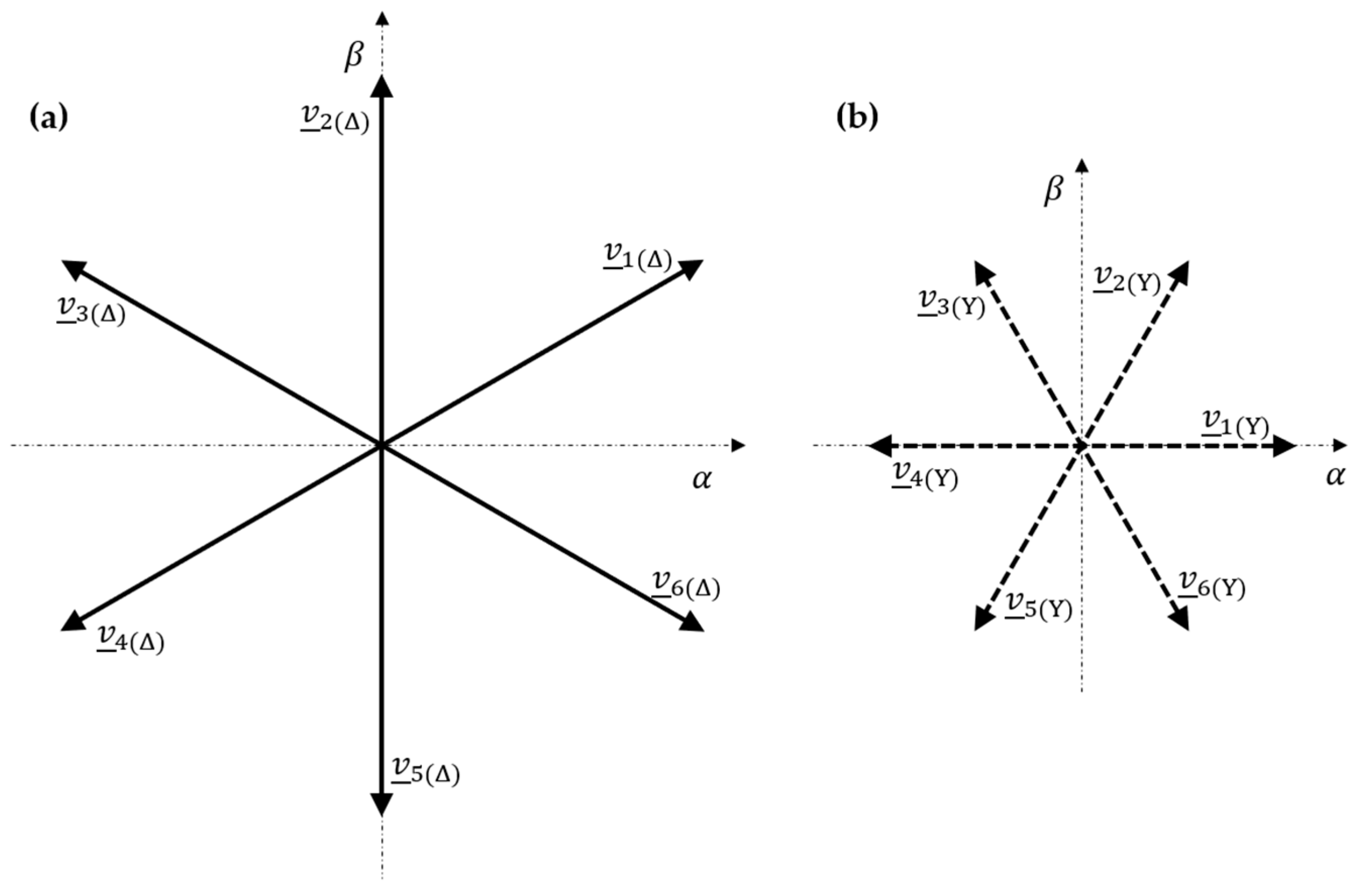
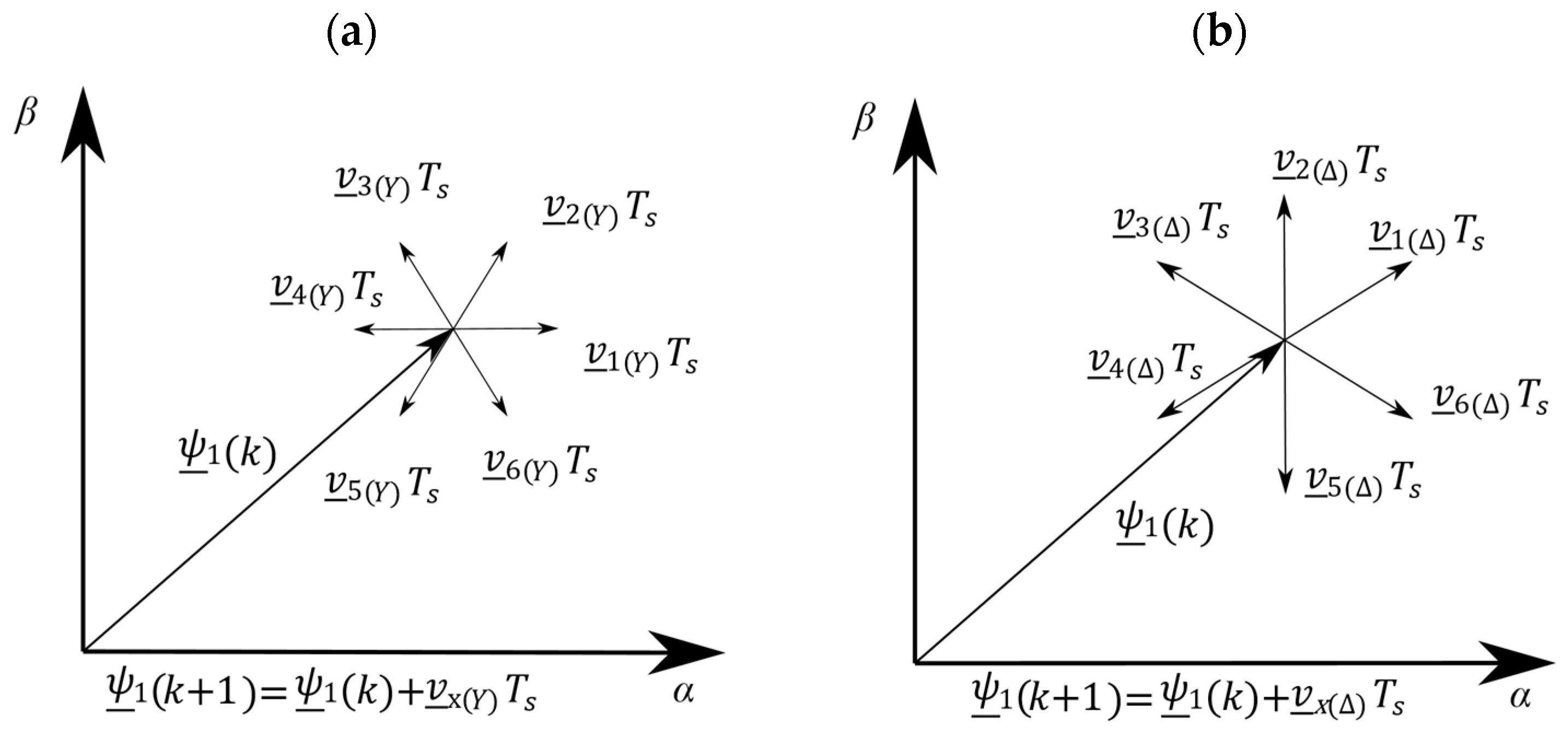
3.1.1. Control of Flux by Active Voltage Vectors
3.1.2. Flux Command Limitation
3.1.3. Utilizable Speed Range
3.1.4. Torque Command Limitation
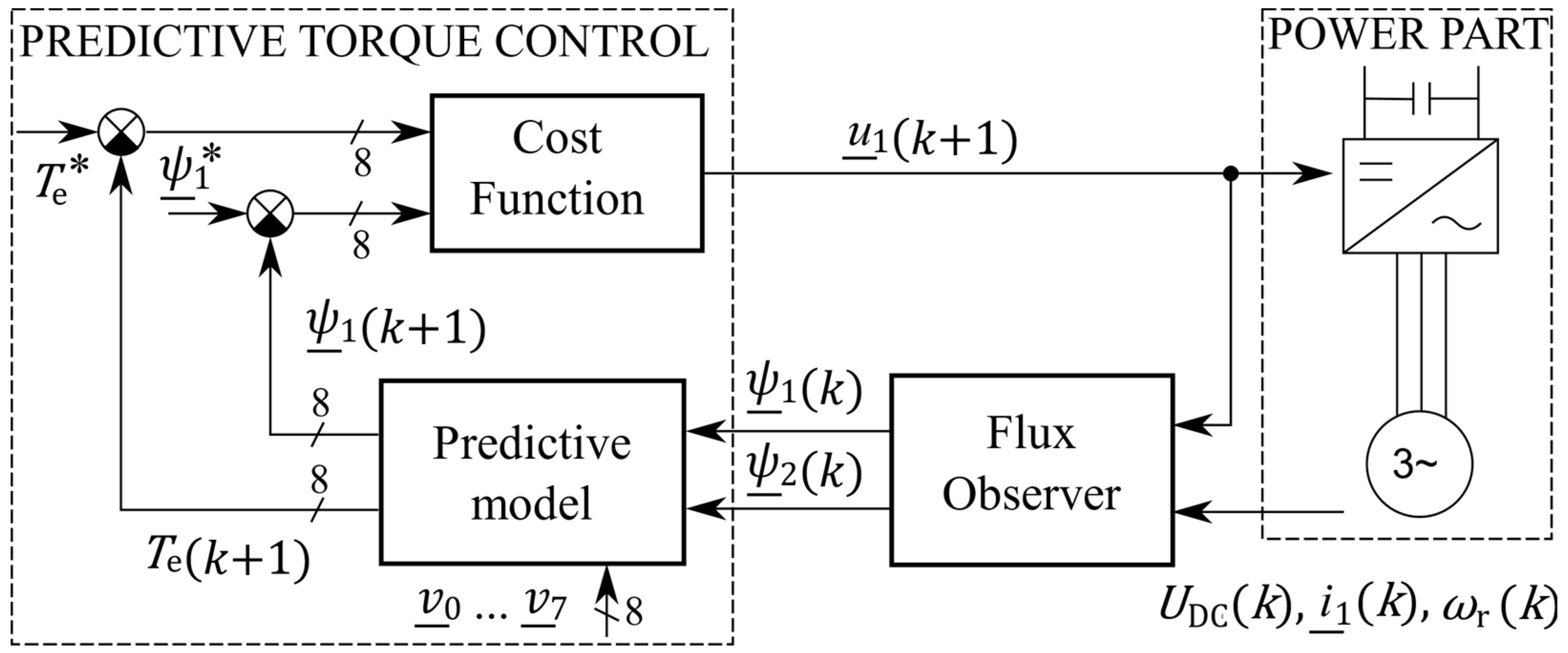
3.2. Predictive Torque Control Algorithm
4. Simulation and Experimental Results
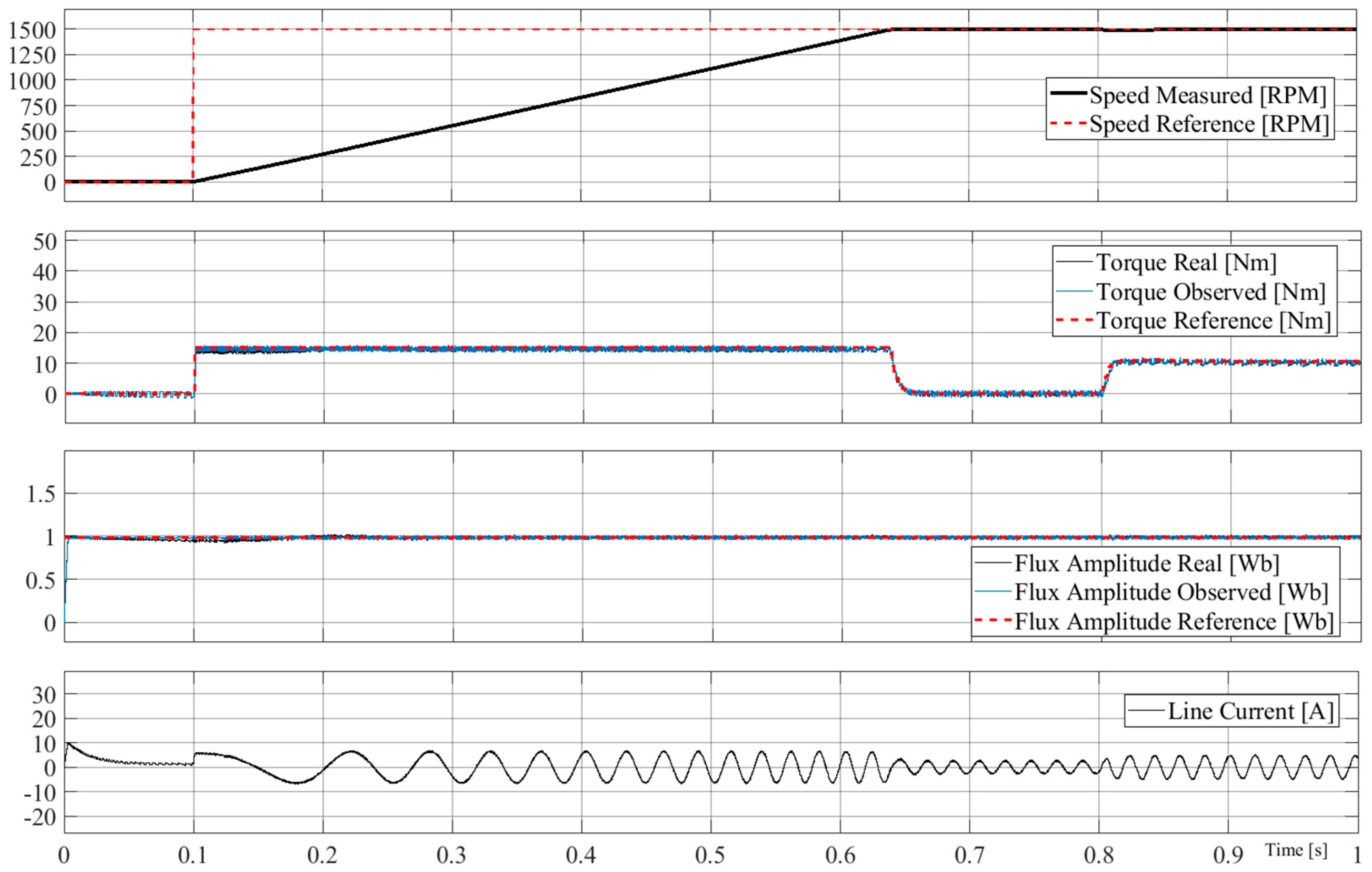
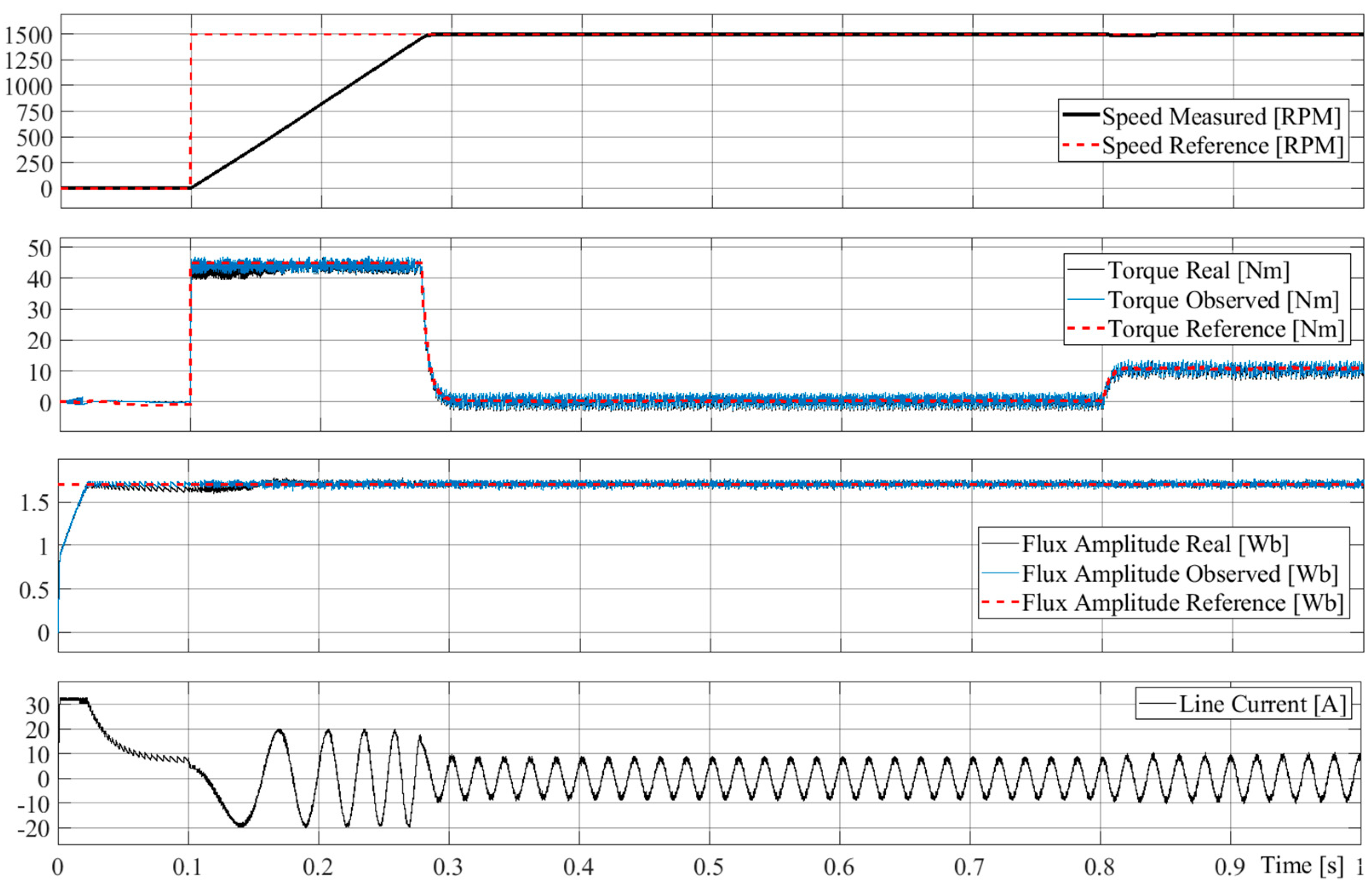
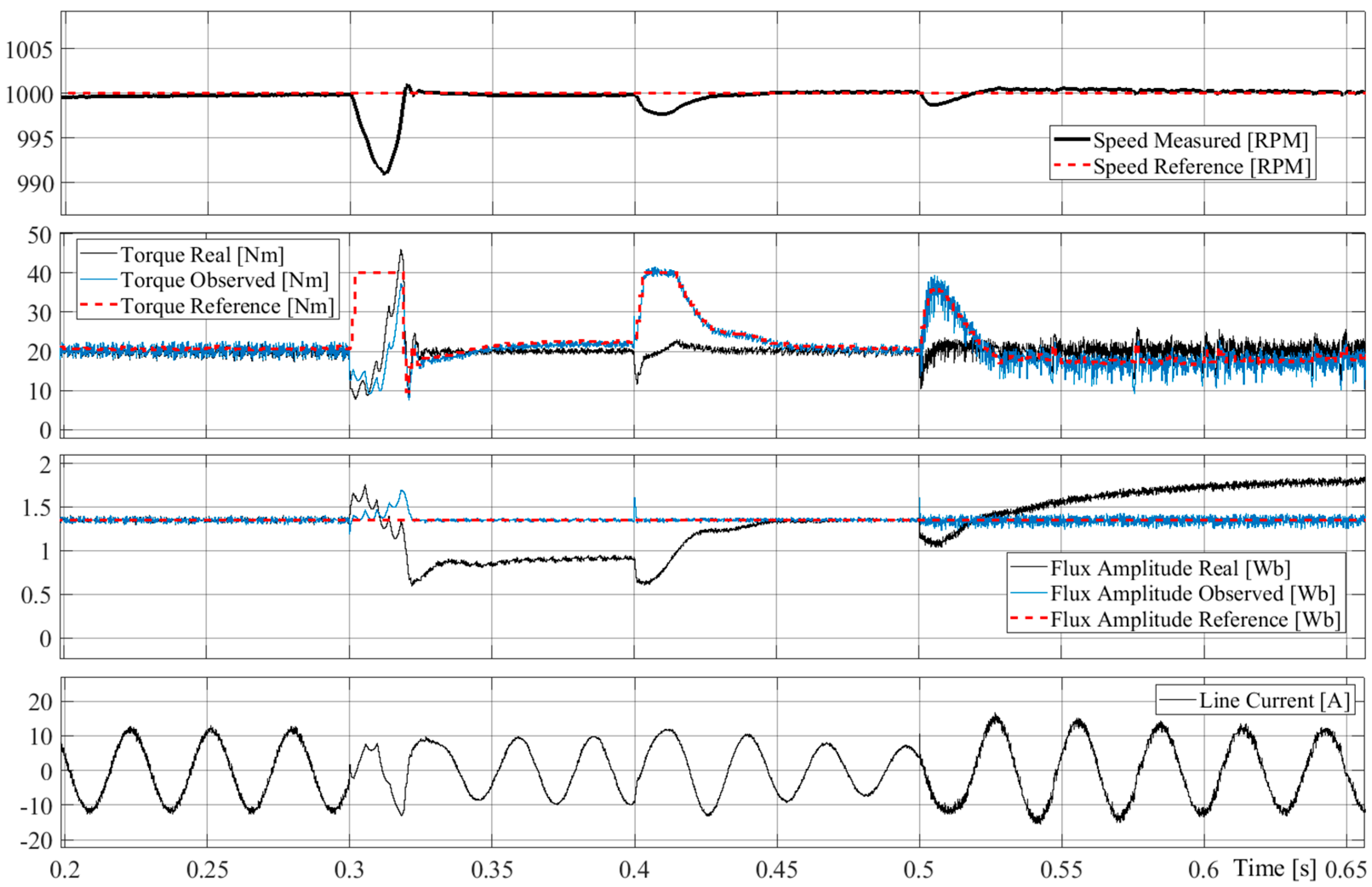
4.1. Simulation Results
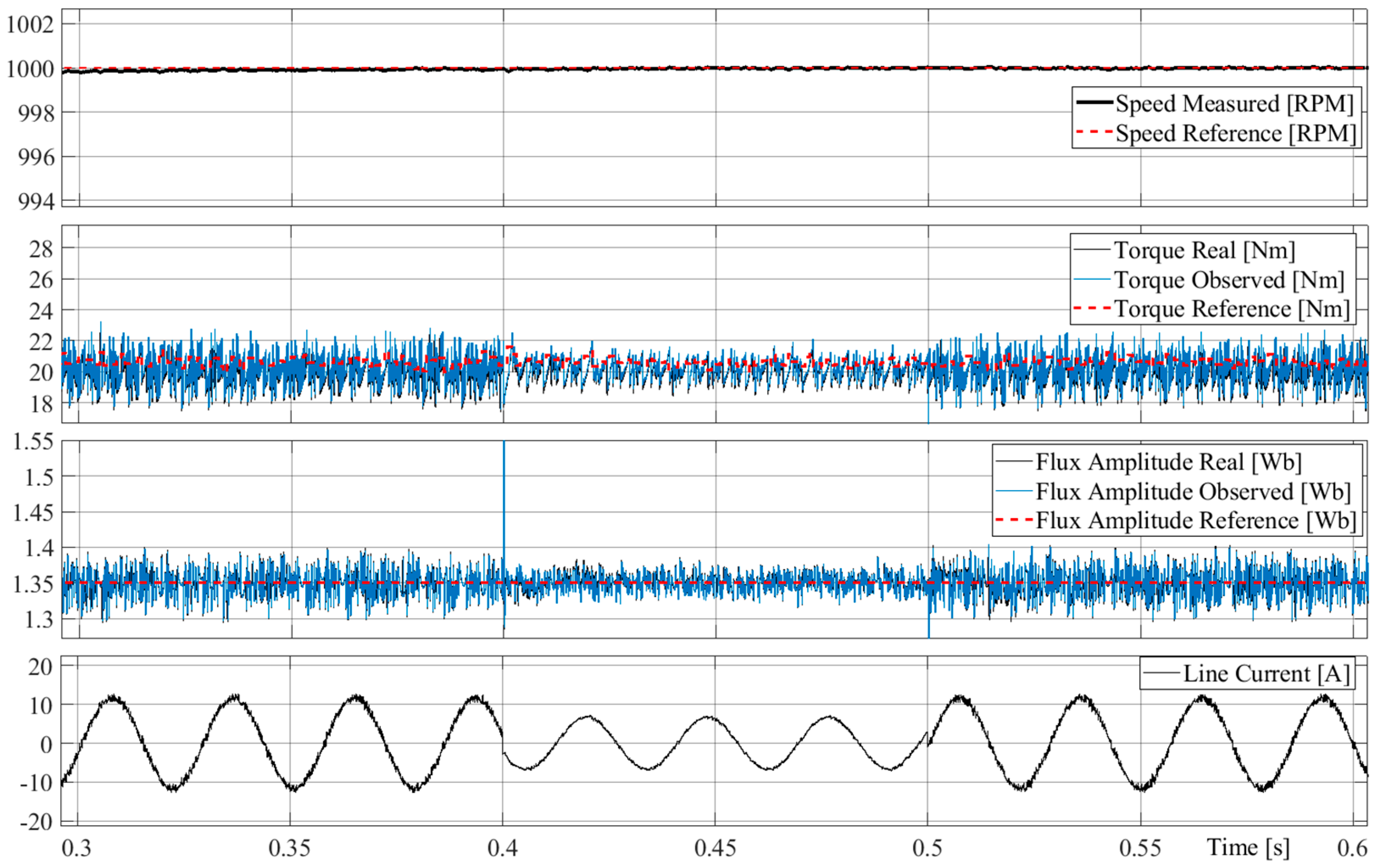
4.2. Experimental Results
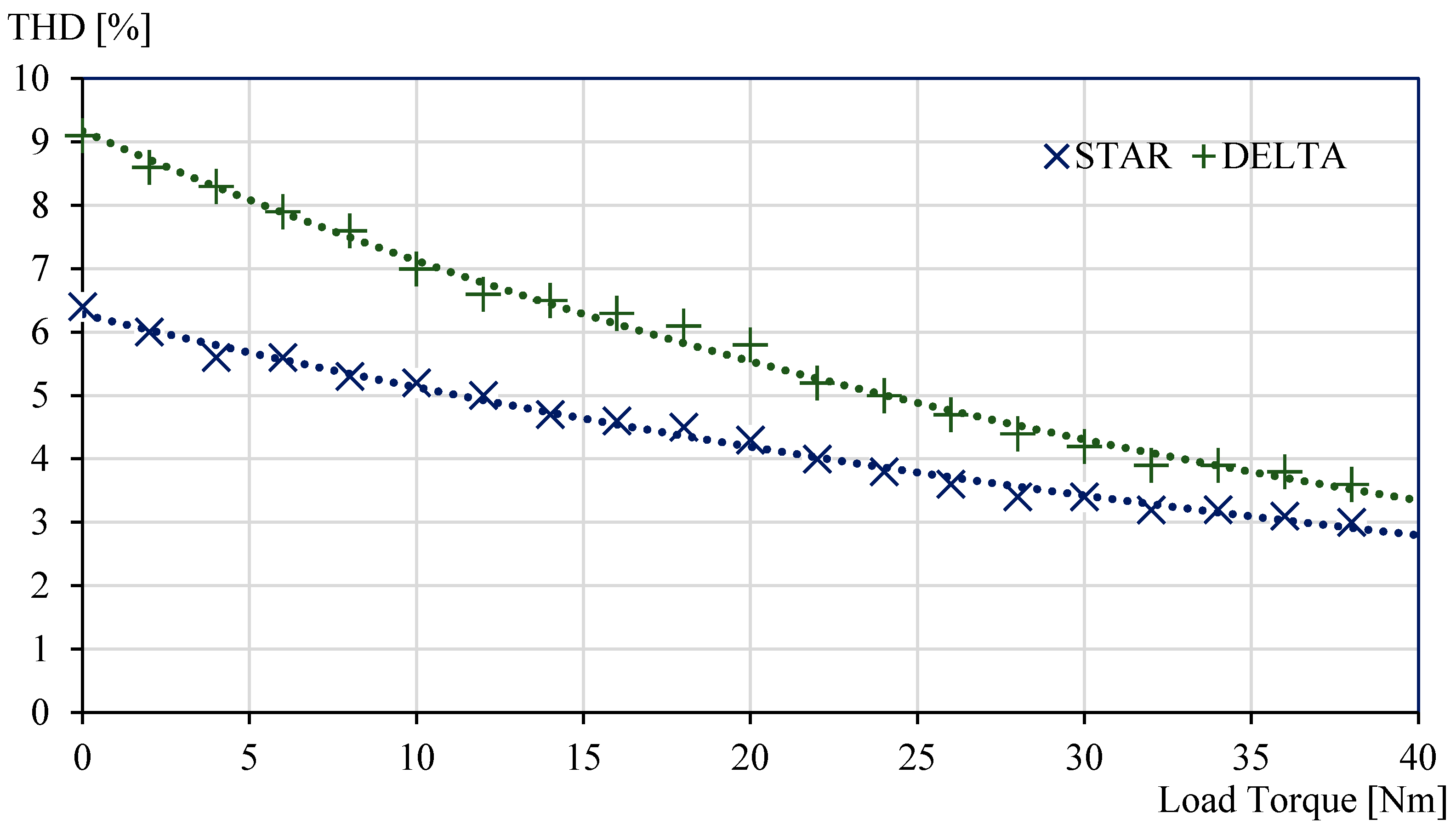
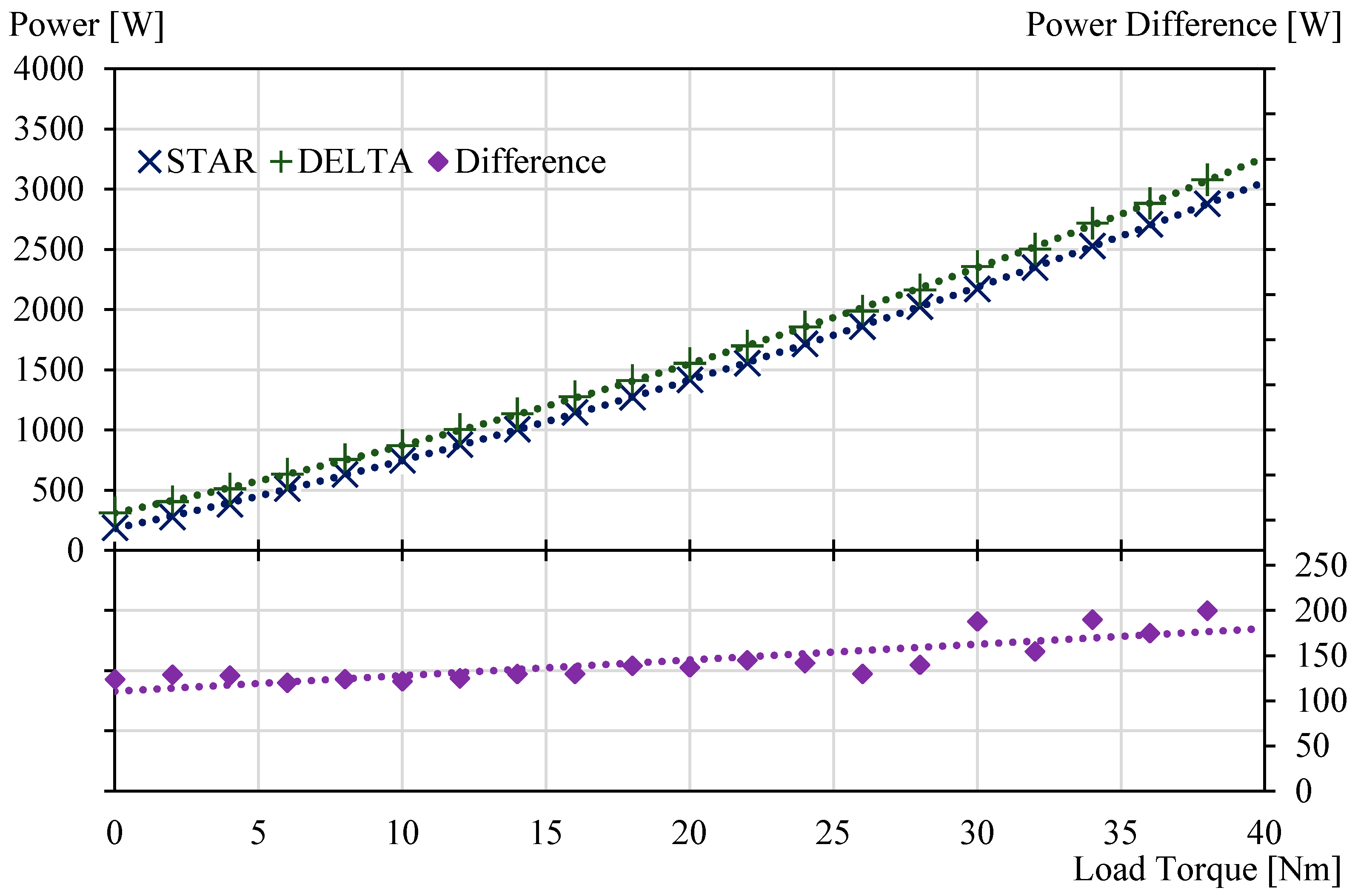
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| stator current space vector [A] | |
| stator voltage space vector [V] | |
| , | basic voltage vectors in star/delta connection [V]; |
| , | stator and rotor flux linkage space vectors [Wb] |
| , , | stator, rotor, and magnetizing inductance [H] |
| , , | stator, rotor, and auxiliary model resistance [Ω]; |
| , , | control signals for the corresponding inverter leg [-] |
| electromechanical torque [Nm] | |
| , | torque command limits in star and delta winding configurations [Nm] |
| sampling time [s] | |
| , | DC-link voltage, maximum voltage obtainable from the inverter [V] |
| nominal machine line-to-line voltage [V] | |
| nominal machine supply frequency [Hz] | |
| , | flux-producing current, nominal flux-producing current [A] |
| , | stator current vector components in stator-fixed system [A] |
| , , | stator phase currents [A] |
| , , | stator line currents [A] |
| cost function weighting coefficient [Nm·Wb−1] | |
| auxiliary model coefficient [-]; | |
| flux-producing current scaling factor [-] | |
| number of pole-pairs [-] | |
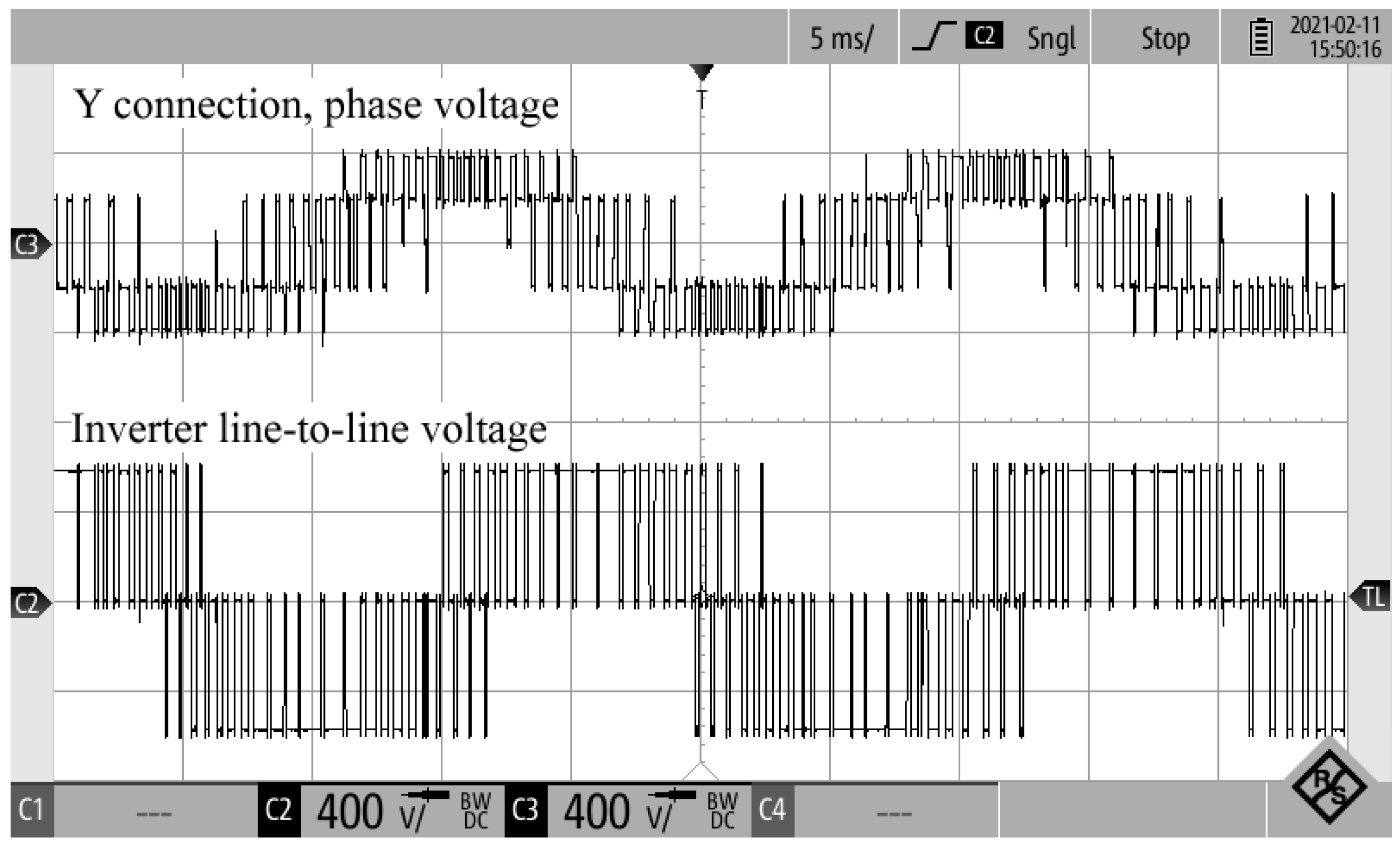
| , , | motor phase voltages [V] |
| , , | inverter phase voltages [V] |
| , | rotor time constant, auxiliary time constant [s]; , |
| , | stator flux linkage vector amplitudes in star and delta [Wb] |
| , | nominal stator flux linkage vector amplitudes in star and delta [Wb] |
| electrical rotor speed [rad·s−1] | |
| complex rotational operator [-]; | |
| Clarke’s transformation constant [-] | |
| leakage factor [-], |
Appendix A
Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Nameplate Data | Mathematical Model Parameters | ||
|---|---|---|---|
| Nominal power | 5.5 kW | Stator resistance | 2.53 Ω |
| Nominal voltage | 380 V | Rotor resistance | 2.62 Ω |
| Nominal current | 11.8 A | Stator inductance | 0.3805 H |
| Nominal speed | 1430 min−1 | Rotor inductance | 0.3805 H |
| Number of poles | 4 | Mag. inductance | 0.3566 H |
| Winding connection | ∆ | Iron core resistance | 835 Ω |
References
- Casadei, D.; Profumo, F.; Serra, G.; Tani, A. FOC and DTC: Two viable schemes for induction motors torque control. IEEE Trans. Power Electron. 2002, 17, 779–787. [Google Scholar] [CrossRef] [Green Version]
- Wang, F.; Mei, X.; Rodriguez, J.; Kennel, R.M. Model predictive control for electrical drive systems—An overview. CES Trans. Electr. Mach. Syst. 2017, 1, 219–230. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, H. Model Predictive Torque Control of Induction Motor Drives with Optimal Duty Cycle Control. IEEE Trans. Power Electron. 2014, 29, 6593–6603. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, Z.; Mei, X.; Rodríguez, J.; Kennel, R.M. Advanced Control Strategies of Induction Machine: Field Oriented Control, Direct Torque Control and Model Predictive Control. Energies 2018, 11, 120. [Google Scholar] [CrossRef] [Green Version]
- Karlovsky, P.; Lettl, J. Induction Motor Drive Direct Torque Control and Predictive Torque Control Comparison Based on Switching Pattern Analysis. Energies 2018, 11, 1793. [Google Scholar] [CrossRef] [Green Version]
- Karamanakos, P.; Geyer, T. Guidelines for the Design of Finite Control Set Model Predictive Controllers. IEEE Trans. Power Electron. 2020, 35, 7434–7450. [Google Scholar] [CrossRef]
- Karamanakos, P.; Stolze, P.; Kennel, R.M.; Manias, S.; du Toit Mouton, H. Variable Switching Point Predictive Torque Control of Induction Machines. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 285–295. [Google Scholar] [CrossRef]
- Bhowate, A.; Aware, M.; Sharma, S. Synthetic Voltage Vector Selection Criteria in Predictive Torque Control for Performance Improvement of Three Phase Induction Motor Drive. In Proceedings of the 2019 10th International Conference on Power Electron and ECCE Asia (ICPE 2019—ECCE Asia), Busan, Korea, 27–30 May 2019; pp. 1263–1267. [Google Scholar]
- Karpe, S.R.; Deokar, S.A.; Dixit, A.M. Switching losses minimization and performance improvement of PCC and PTC methods of model predictive direct torque control drives with 15-level inverter. J. Electr. Syst. Inf. Technol. 2018, 5, 759–776. [Google Scholar] [CrossRef]
- Bándy, K.; Stumpf, P. Model Predictive Torque Control for Multilevel Inverter fed Induction Machines Using Sorting Networks. IEEE Access 2021, 9, 13800–13813. [Google Scholar] [CrossRef]
- Karlovsky, P.; Lipcak, O.; Bauer, J.; Lettl, J. Predictive Torque Control of Induction Motor with Integrated DC-Link Voltage Optimisation. IET Power Electron. 2020, 13, 3396–3406. [Google Scholar] [CrossRef]
- Karlovsky, P.; Lipcak, O.; Bauer, J. Iron Loss Minimization Strategy for Predictive Torque Control of Induction Motor. Electronics 2020, 9, 566. [Google Scholar] [CrossRef] [Green Version]
- Himabindu, T.; Teja, A.V.R.; Bhuvaneswari, G.; Singh, B. Simplified predictive torque control of an IM drive with efficient zero vector placement. In Proceedings of the 2017 IEEE 26th International Symposium on Industrial Electronics (ISIE), Edinburgh, UK, 19–21 June 2017; pp. 362–367. [Google Scholar]
- Geyer, T.; Quevedo, D.E. Performance of Multistep Finite Control Set Model Predictive Control for Power Electronics. IEEE Trans. Power Electron. 2015, 30, 1633–1644. [Google Scholar] [CrossRef]
- Arif, A.; Baloch, N.; Ayub, M.; Kwon, B.-I. Wide-Speed Range Operation of PM Vernier Machines Using Wye and Wye-Delta Winding Configurations. IEEE Access 2020, 8, 194709–194718. [Google Scholar] [CrossRef]
- Atiq, S.; Lipo, T.A.; Kwon, B. Wide Speed Range Operation of Non-Salient PM Machines. IEEE Trans. Energy Convers. 2016, 31, 1179–1191. [Google Scholar] [CrossRef]
- Kume, T.; Swamy, M. A quick transition electronic winding changeover technique for extended speed ranges. In Proceedings of the 2004 IEEE 35th Annual Power Electron, Specialists Conference, Aachen, Germany, 20–25 June 2004; pp. 3384–3389. [Google Scholar]
- Wang, M.; Hsu, N.; Chiang, C.; Wang, S.; Shau, T. A novel changeover technique for variable-winding brushless DC motor drives. In Proceedings of the SICE Annual Conference 2010, Taipei, Taiwan, 18–21 August 2010; pp. 2650–2653. [Google Scholar]
- Kume, T.; Iwakane, T.; Sawa, T.; Yoshida, T.; Nagai, I. A wide constant power range vector-controlled AC motor drive using winding changeover technique. IEEE Trans. Ind. Appl. 1991, 27, 934–939. [Google Scholar] [CrossRef]
- Swamy, M.M.; Kume, T.; Maemura, A.; Morimoto, S. Extended high-speed operation via electronic winding-change method for AC motors. IEEE Trans. Ind. Appl. 2006, 42, 742–752. [Google Scholar] [CrossRef]
- Shi, P.; Cui, X.; Zhu, L. A SCR-based switch-control strategy of delta/wye switchover for delta connected induction motors. In Proceedings of the 7th International Power Electron and Motion Control Conference, Harbin, China, 2–5 June 2012; pp. 2607–2611. [Google Scholar]
- Ferreira, F.J.T.E.; de Almeida, A.T.; Baoming, G.; Faria, S.P.; Marques, J.M. Automatic change of the stator-winding connection of variable-load three-phase induction motors to improve the efficiency and power factor. In Proceedings of the 2005 IEEE International Conference on Industrial Technology, Hong Kong, China, 14–17 December 2005; pp. 1331–1336. [Google Scholar]
- Ferreira, F.J.T.E.; de Almeida, A.T. Method for in-field evaluation of the stator winding connection of three-phase induction motors to maximize efficiency and power factor. IEEE Trans. Energy Convers. 2006, 21, 370–379. [Google Scholar] [CrossRef]
- Beleiu, H.G.; Maier, V.; Pavel, S.G.; Birou, I.; Pică, C.S.; Dărab, P.C. Harmonics Consequences on Drive Systems with Induction Motor. Appl. Sci. 2020, 10, 1528. [Google Scholar] [CrossRef] [Green Version]
- Rodriguez, J.; Cortes, P. Predictive Control of Power Converters and Electrical Drives; Wiley-IEEE Press: Hoboken, NJ, USA, 2012; 246p. [Google Scholar]
- Zhang, L.; Hu, Y.; Huang, W. Research on DTC Control Strategy of Induction Starter/generator System. In Proceedings of the 2005 International Conference on Electrical Machines and Systems, Nanjing, China, 27–29 September 2005; pp. 1528–1533. [Google Scholar]
- Zarri, L.; Mengoni, M.; Tani, A.; Serra, G.; Casadei, D.; Ojo, J.O. Control schemes for field weakening of induction machines: A review. In Proceedings of the 2015 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Turin, Italy, 26–27 March 2015; pp. 146–155. [Google Scholar]
- Gacho, J.; Zalman, M. IM Based Speed Servodrive with Luenberger Observer. J. Electr. Eng. 2016, 61, 149–156. [Google Scholar] [CrossRef] [Green Version]
- Cortes, P.; Kouro, S.; La Rocca, B.; Vargas, R.; Rodriguez, J.; Leon, J.I.; Vazquez, S.; Franquelo, L.G. Guidelines for weighting factors design in Model Predictive Control of power converters and drives. In Proceedings of the 2009 IEEE International Conference on Industrial Technology, Churchill, VIC, Australia, 10–13 February 2009; pp. 1–7. [Google Scholar]
- Zhang, D.; An, R.; Wu, T. Effect of voltage unbalance and distortion on the loss characteristics of three-phase cage induction motor. IET Electr. Power Appl. 2018, 12, 264–270. [Google Scholar] [CrossRef]
















| Switching Combination | Corresponding Phase Voltage Vector | |||
|---|---|---|---|---|
| 000 | 0 | 0 | 0 | |
| 100 | 0 | |||
| 110 | 0 | |||
| 010 | 0 | |||
| 011 | 0 | |||
| 001 | 0 | |||
| 101 | 0 | |||
| 111 | 0 | 0 | 0 |
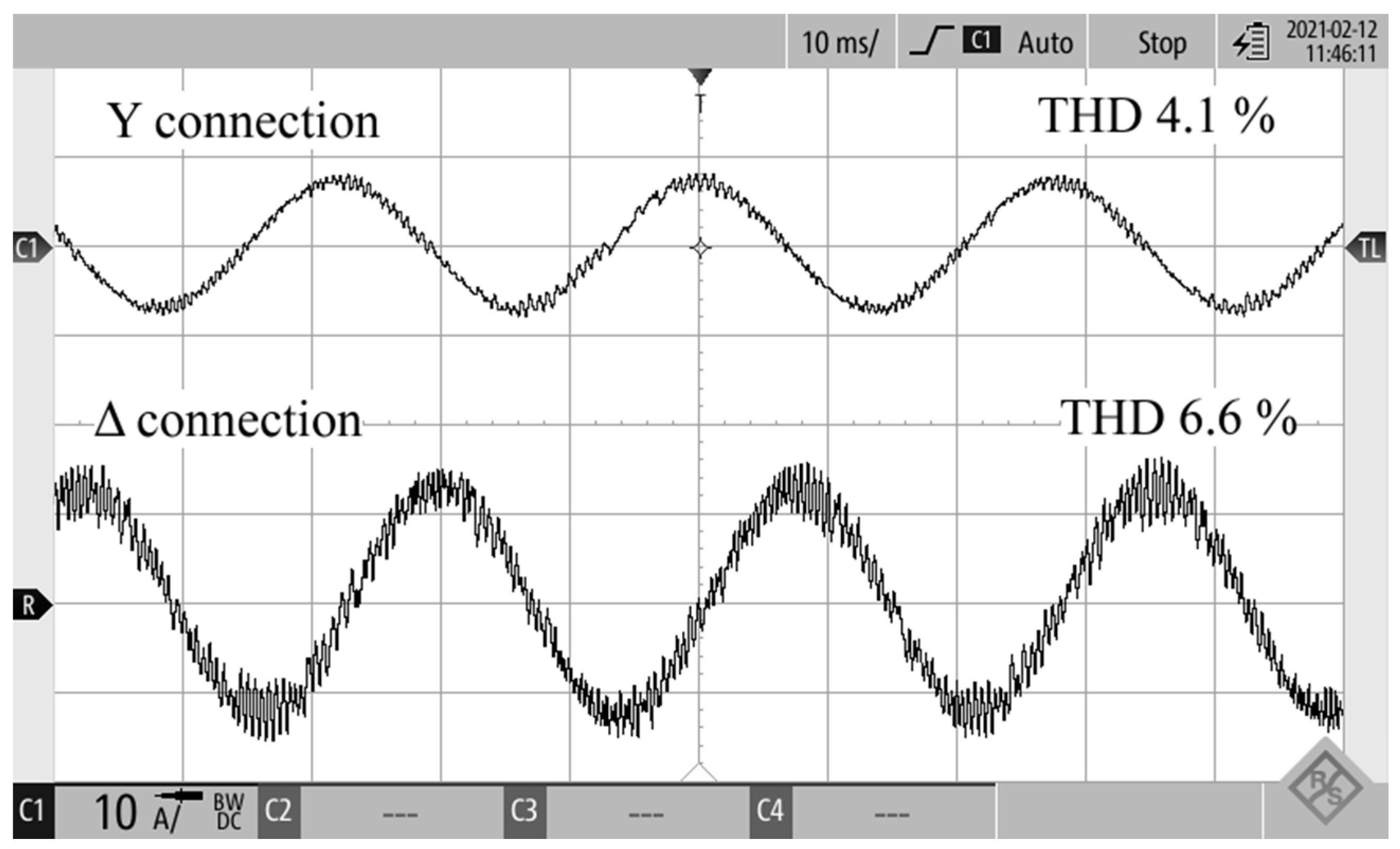
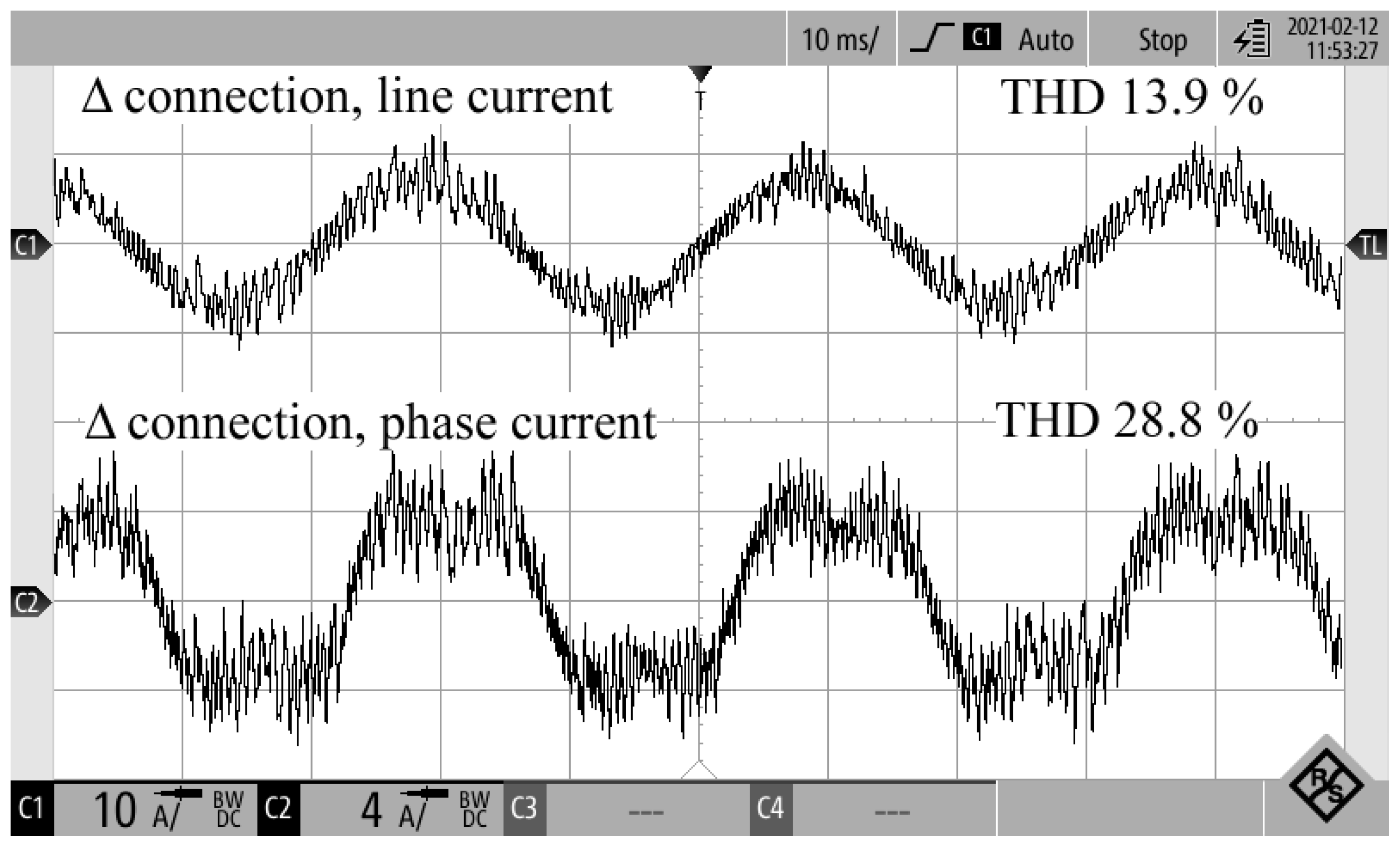
| Rotational Speed [RPM] | Load Torque [Nm] | Current THD—Y [%] | Input Electric Power—Y [W] | Line Current THD—∆ [%] | Phase Current THD—∆ [%] | Input Electric Power—∆ [W] | Difference in Power [W] |
|---|---|---|---|---|---|---|---|
| 10 (1.7 Wb) | 0 | - 1 | 99 | - 1 | - 1 | 182 | 83 |
| 15 | - 1 | 227 | - 1 | - 1 | 362 | 135 | |
| 30 | - 1 | 648 | - 1 | - 1 | 874 | 226 | |
| 37 | - 1 | 935 | - 1 | - 1 | 1246 | 311 | |
| 100 (1.7 Wb) | 0 | - 1 | 118 | - 1 | - 1 | 212 | 94 |
| 15 | - 1 | 367 | - 1 | - 1 | 478 | 111 | |
| 30 | - 1 | 885 | - 1 | - 1 | 1072 | 187 | |
| 37 | - 1 | 1205 | - 1 | - 1 | 1440 | 235 | |
| 250 (1.7 Wb) | 0 | - 1 | 154 | - 1 | - 1 | 270 | 116 |
| 15 | 3.5 | 632 | 4.5 | 10.4 | 758 | 126 | |
| 30 | 2.7 | 1370 | 2.6 | 6.8 | 1550 | 180 | |
| 37 | 2.4 | 1785 | 2.8 | 6.5 | 2000 | 215 | |
| 500 (1.7 Wb) | 0 | 5.8 | 195 | 8.7 | 27.1 | 324 | 129 |
| 15 | 4.6 | 1065 | 6.7 | 16.3 | 1196 | 131 | |
| 30 | 3.4 | 2187 | 4.5 | 9.5 | 2387 | 200 | |
| 37 | 3.2 | 2830 | 3.5 | 9.5 | 2980 | 150 | |
| 750 (1.7 Wb) | 0 | 8.3 | 156 | 14.2 | 18.8 | 278 | 122 |
| 15 | 4.2 | 1502 | 5.9 | 8.1 | 1651 | 149 | |
| 30 | 2.9 | 3300 | 4.4 | 9.0 | 3500 | 200 | |
| 37 | 3.7 | 4415 | 4.4 | 11.5 | 4640 | 225 | |
| 1000 (1.3 Wb) | 0 | 11.5 | 194 | 19.2 | 22.4 | 310 | 116 |
| 15 | 5.5 | 1875 | 8.7 | 10 | 2016 | 141 | |
| 30 | 3.7 | 4140 | 5.7 | 10.6 | 4350 | 210 | |
| 37 | - 2 | - 2 | 5.3 | 11.1 | 5750 | - 2 | |
| 1250 (1 Wb) | 0 | 15.5 | 208 | 27.7 | 28 | 327 | 119 |
| 10 | 6 | 1590 | 10.7 | 10.9 | 1725 | 135 | |
| 20 | 3.8 | 3515 | 6.5 | 10.8 | 3725 | 210 | |
| 1250 (1.3 Wb) | 30 | - 2 | - 2 | 6.0 | 11.7 | 5170 | - 2 |
| 37 | - 2 | - 2 | 5.7 | 11.6 | 6700 | - 2 | |
| 1430 (1 Wb) | 0 | 13.6 | 242 | 25.9 | 26.5 | 355 | 113 |
| 5 | 8.5 | 910 | 16.0 | 16.5 | 1035 | 125 | |
| 10 | 5.3 | 1785 | 10.1 | 10.3 | 1925 | 140 | |
| 15 | 4.2 | 2780 | 7.3 | 9.5 | 2945 | 165 | |
| 1430 (1.7 Wb) | 20 | - 2 | - 2 | 9.0 | 15.9 | 3620 | - 2 |
| 30 | - 2 | - 2 | 7.2 | 12.4 | 5385 | - 2 | |
| 37 | - 2 | - 2 | 6.4 | 11.3 | 6720 | - 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lipcak, O.; Karlovsky, P.; Kobrle, P.; Bauer, J. Current Ripple Reduction of Predictive Torque-Controlled Induction Motor Drive Using Delta-Star Switchover. Appl. Sci. 2021, 11, 2863. https://doi.org/10.3390/app11062863
Lipcak O, Karlovsky P, Kobrle P, Bauer J. Current Ripple Reduction of Predictive Torque-Controlled Induction Motor Drive Using Delta-Star Switchover. Applied Sciences. 2021; 11(6):2863. https://doi.org/10.3390/app11062863
Chicago/Turabian StyleLipcak, Ondrej, Pavel Karlovsky, Pavel Kobrle, and Jan Bauer. 2021. "Current Ripple Reduction of Predictive Torque-Controlled Induction Motor Drive Using Delta-Star Switchover" Applied Sciences 11, no. 6: 2863. https://doi.org/10.3390/app11062863